Novel Distributed Optimal Control of Battery Energy Storage System in an Islanded Microgrid with Fast Frequency Recovery


Abstract
:1. Introduction
2. Preliminary
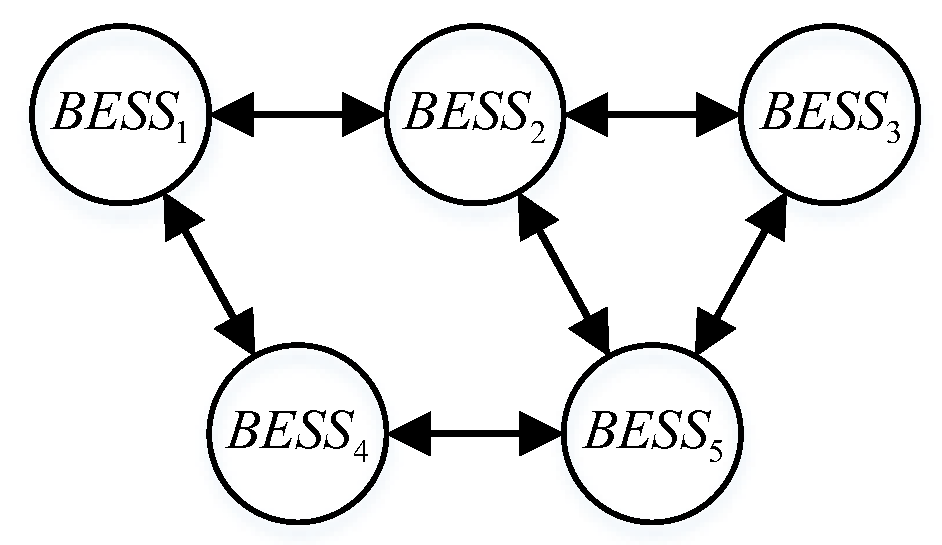
2.1. Consensus Algorithm
2.2. Improved Linear Active Disturbance Rejection Control
3. Problem Formulation
4. Proposed Distributed Optimal Control of BESS with Fast Frequency Recovery
4.1. Distributed Optimal Control Strategy
4.2. Algorithm Implementation
5. Simulation Results and Analysis
5.1. Case A
5.2. Case B
5.3. Case C
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations and Notations
| CERTS | Consortium for Electric Reliability Technology Solutions |
| RESs | Renewable Energy Sources |
| BESSs | Battery Energy Storage Systems |
| WTG | Wind Turbine Generator |
| MAS | Multi-Agent System |
| LADRC | Linear Active Disturbance Rejection Control |
| LESO | Linear Extended State Observer |
| W | Weight matrix |
| f | System total disturbance of external and internal disturbance |
| System states | |
| Estimation of system states | |
| Parameters of LESO | |
| Controller parameters of LADRC | |
| Power output of the BESS | |
| Power output of the RES | |
| Power output of the load | |
| Cost of the BESS | |
| Cost coefficients | |
| The index sets of BESSs, RESs, and load demand | |
| The lower and upper bounds of BESS power output | |
| Lagrange function | |
| Lagrange multiplier | |
| Incremental cost of the BESS | |
| Optimal incremental cost | |
| Convergence coefficient | |
| Supply-demand mismatch of iteration | |
| Rate of change of frequency | |
| Integral of time-weighted absolute value of the error |
References
- Lasseter, R.H. Microgrids. In Proceedings of the Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002. [Google Scholar] [CrossRef]
- Abu-Sharkh, S.; Arnold, R.J.; Kohler, J.; Li, R.; Markvart, T.; Ross, J.N.; Steemers, K.; Wilson, P.; Yao, R. Can microgrids make a major contribution to UK energy supply? Renew. Sust. Energy Rev. 2006, 10, 78–127. [Google Scholar] [CrossRef] [Green Version]
- Alsaidan, I.; Alanazi, A.; Gao, W.Z.; Wu, H.Y.; Khodaei, A. State-Of-The-Art in Microgrid-Integrated Distributed Energy Storage Sizing. Energies 2017, 10, 1421. [Google Scholar] [CrossRef]
- Aditya, S.; Das, D. Application of battery energy storage system to load frequency control of an isolated power system. Int. J. Energy Res. 1999, 23, 247–258. [Google Scholar] [CrossRef]
- Li, X.J.; Hui, D.; Lai, X.K. Battery energy storage station (BESS)-based smoothing control of photovoltaic (PV) and wind power generation fluctuations. IEEE Trans. Sustain. Energy 2013, 4, 464–473. [Google Scholar] [CrossRef]
- He, G.N.; Chen, Q.X.; Kang, C.Q.; Xia, Q.; Poolla, K. Cooperation of wind power and battery storage to provide frequency regulation in power markets. IEEE Trans. Power Syst. 2017, 32, 3559–3568. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sust. Energ. Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Yoldas, Y.; Onen, A.; Muyeen, S.M.; Vasilakos, A.V.; Alan, I. Enhancing smart grid with microgrids: Challenges and opportunities. Renew. Sust. Energ. Rev. 2017, 72, 205–214. [Google Scholar] [CrossRef]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized control for optimizing microgrids operation. IEEE Trans. Energy Convers. 2008, 23, 241–248. [Google Scholar] [CrossRef]
- Tan, K.T.; Peng, X.Y.; So, P.L.; Chu, Y.C.; Chen, M.Z.Q. Centralized control for parallel operation of distributed generation inverters in microgrids. IEEE Trans. Smart Grid 2012, 3, 1977–1987. [Google Scholar] [CrossRef] [Green Version]
- Delille, G.; Francois, B.; Malarange, G. Dynamic Frequency Control Support by Energy Storage to Reduce the Impact of Wind and Solar Generation on Isolated Power System’s Inertia. IEEE Trans. Sustain. Energy 2012, 3, 931–939. [Google Scholar] [CrossRef]
- Abo-Khalil, A.G.; Lee, D.C. MPPT Control of Wind Generation Systems Based on Estimated Wind Speed Using SVR. IEEE Trans. Ind. Electron. 2008, 55, 1489–1490. [Google Scholar] [CrossRef]
- Zhao, T.; Ding, Z. Cooperative Optimal Control of Battery Energy Storage System under Wind Uncertainties in a Microgrid. IEEE Trans. Power Syst. 2018, 33, 2292–2300. [Google Scholar] [CrossRef]
- Zhang, Z.; Chow, M.Y. Convergence Analysis of the Incremental Cost Consensus Algorithm Under Different Communication Network Topologies in a Smart Grid. IEEE Trans. Power Syst. 2012, 27, 1761–1768. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, W.; Hug, G.; Kar, S.; Li, Z. Cooperative Control of Distributed Energy Storage Systems in a Microgrid. IEEE Trans. Smart Grid 2015, 6, 238–248. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z. Distributed Optimal Resource Management Based on the Consensus Algorithm in a Microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2584–2592. [Google Scholar] [CrossRef]
- Zhao, T.; Zuo, Z.; Ding, Z. Cooperative control of distributed battery energy storage systems in Microgrids. In Proceeding of the 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 10019–10024. [Google Scholar] [CrossRef]
- Zhao, T.; Ding, Z. Distributed Agent Consensus-Based Optimal Resource Management for Microgrids. IEEE Trans. Sustain. Energy 2018, 9, 443–452. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wu, W.; Zhang, B. A Fully Distributed Power Dispatch Method for Fast Frequency Recovery and Minimal Generation Cost in Autonomous Microgrids. IEEE Trans. Smart Grid 2016, 7, 19–31. [Google Scholar] [CrossRef]
- Khatibzadeh, A.; Besmi, M.; Mahabadi, A.; Haghifam, M.R. Multi-Agent-Based Controller for Voltage Enhancement in AC/DC Hybrid Microgrid Using Energy Storages. Energies 2017, 10. [Google Scholar] [CrossRef]
- Qi, X.; Bai, Y. Improved Linear Active Disturbance Rejection Control for Microgrid Frequency Regulation. Energies 2017, 10, 1047. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Wood, A.J.; Wollenberg, B.F. Power Generation, Operation, Control; John Wiley & Sons: Hoboken, NJ, USA, 1996; pp. 32–33. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (p.u.) | (p.u.) | Initial Value (p.u.) | |||
|---|---|---|---|---|---|
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 |
| Load and WTG | Initial Value (p.u.) | (p.u.) | (p.u.) |
|---|---|---|---|
| 0 | |||
| 0 | |||
| 0 | |||
| 0 | |||
| 0 |
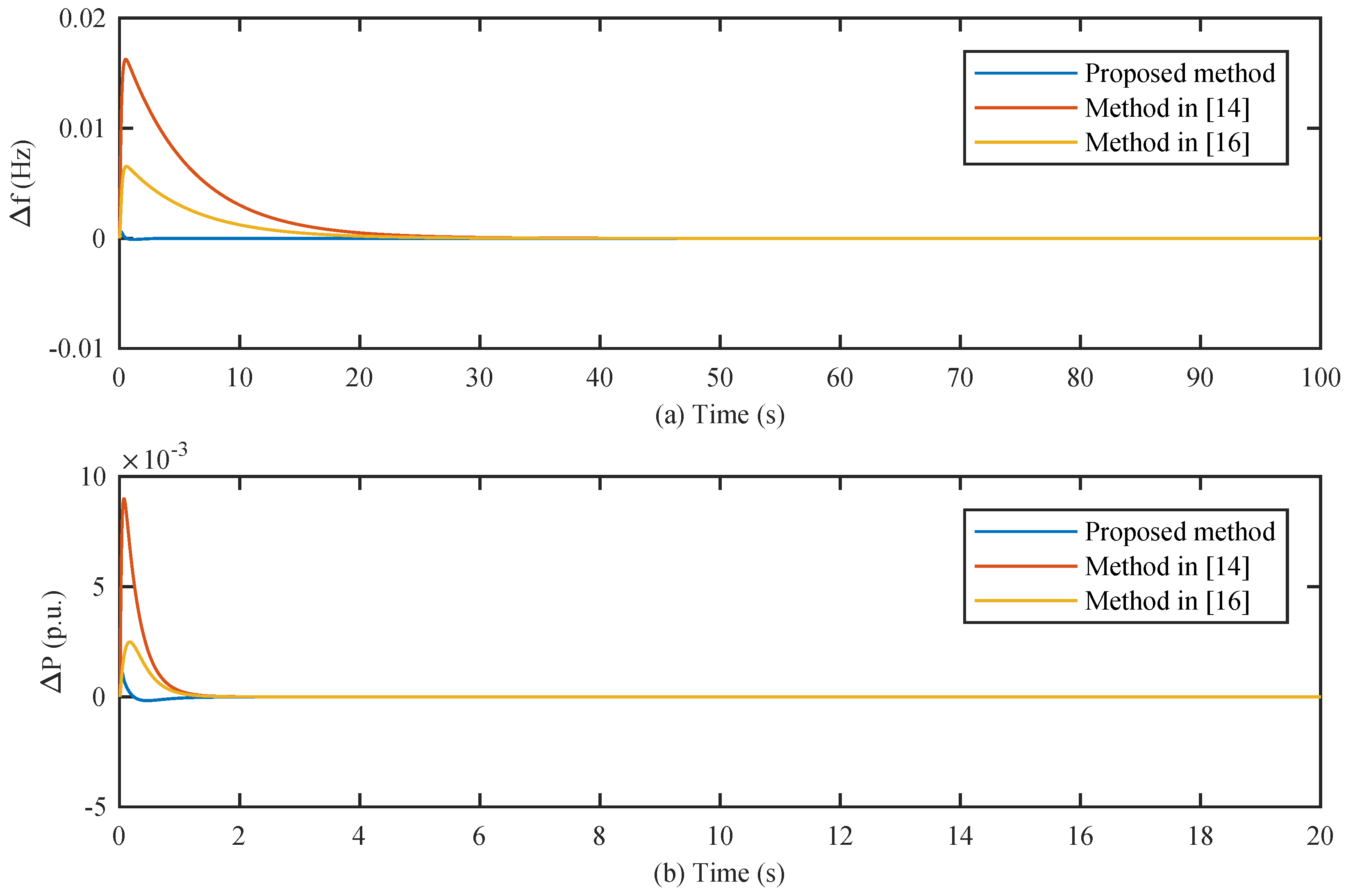
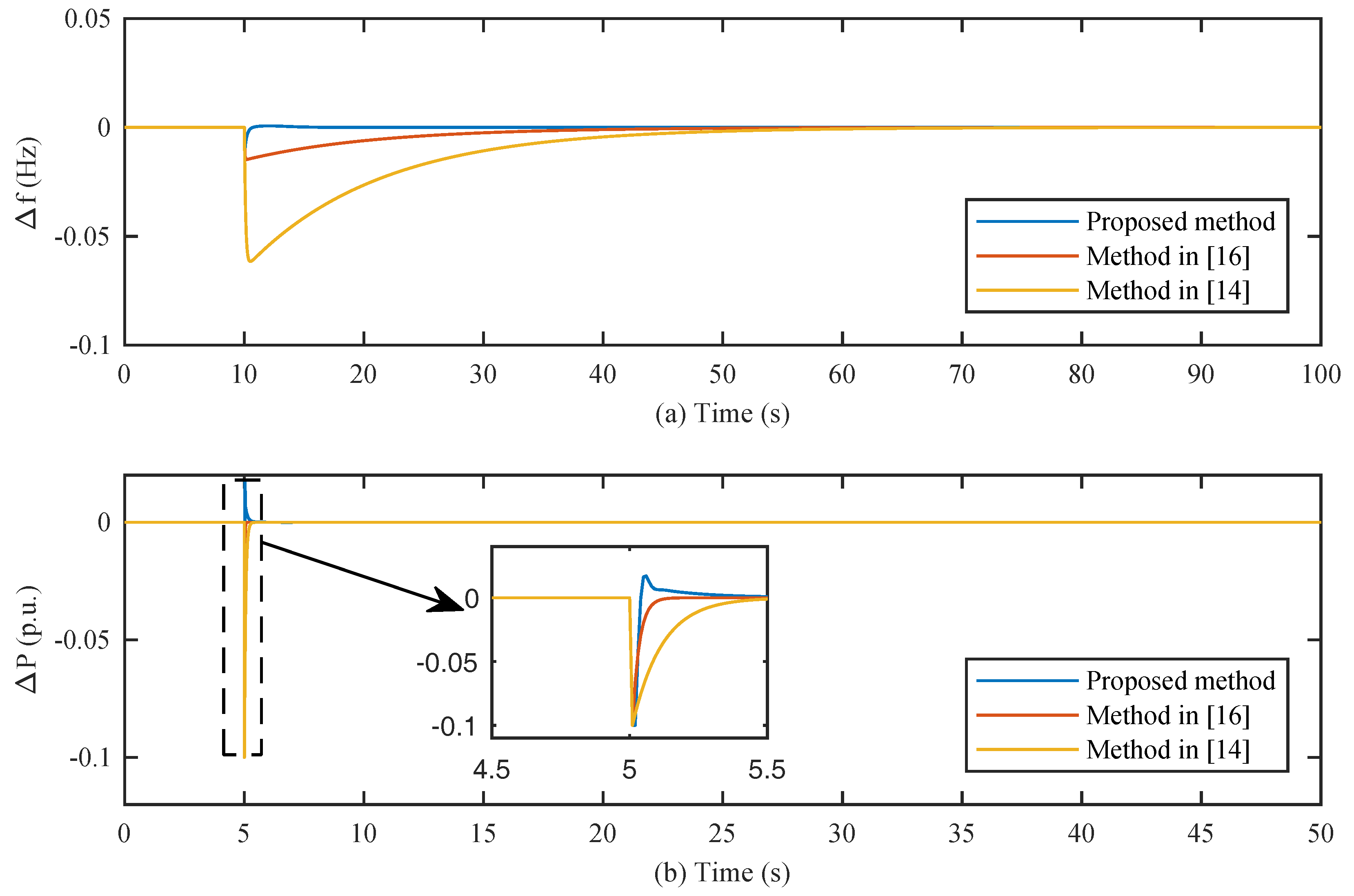
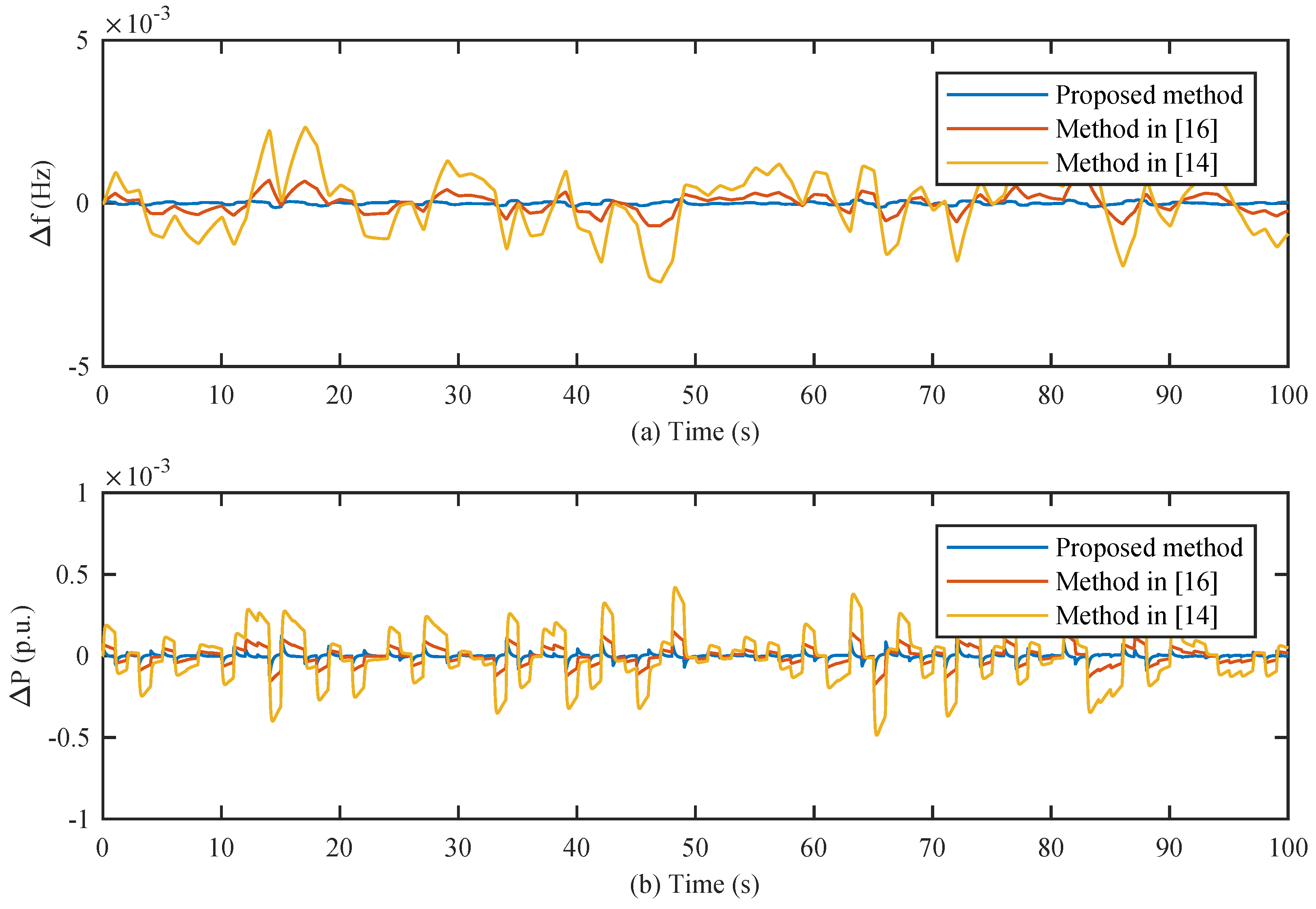
| Control Strategy | Overshoot | ITAE | RoCoF |
|---|---|---|---|
| Proposed method | −0.0006 Hz | 0.0012 | 0.0013 |
| Method in [16] | −0.0070 Hz | 0.9232 | 0.0877 |
| Method in [14] | −0.0174 Hz | 2.2521 | 0.2152 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, X.; Bai, Y.; Luo, H.; Zhang, Y.; Zhou, G.; Wei, Z. Novel Distributed Optimal Control of Battery Energy Storage System in an Islanded Microgrid with Fast Frequency Recovery. Energies 2018, 11, 1955. https://doi.org/10.3390/en11081955
Qi X, Bai Y, Luo H, Zhang Y, Zhou G, Wei Z. Novel Distributed Optimal Control of Battery Energy Storage System in an Islanded Microgrid with Fast Frequency Recovery. Energies. 2018; 11(8):1955. https://doi.org/10.3390/en11081955
Chicago/Turabian StyleQi, Xiao, Yan Bai, Huanhuan Luo, Yiqing Zhang, Guiping Zhou, and Zhonghua Wei. 2018. "Novel Distributed Optimal Control of Battery Energy Storage System in an Islanded Microgrid with Fast Frequency Recovery" Energies 11, no. 8: 1955. https://doi.org/10.3390/en11081955
APA StyleQi, X., Bai, Y., Luo, H., Zhang, Y., Zhou, G., & Wei, Z. (2018). Novel Distributed Optimal Control of Battery Energy Storage System in an Islanded Microgrid with Fast Frequency Recovery. Energies, 11(8), 1955. https://doi.org/10.3390/en11081955