Adaptive Virtual Impedance Droop Control Based on Consensus Control of Reactive Current





Abstract
:1. Introduction
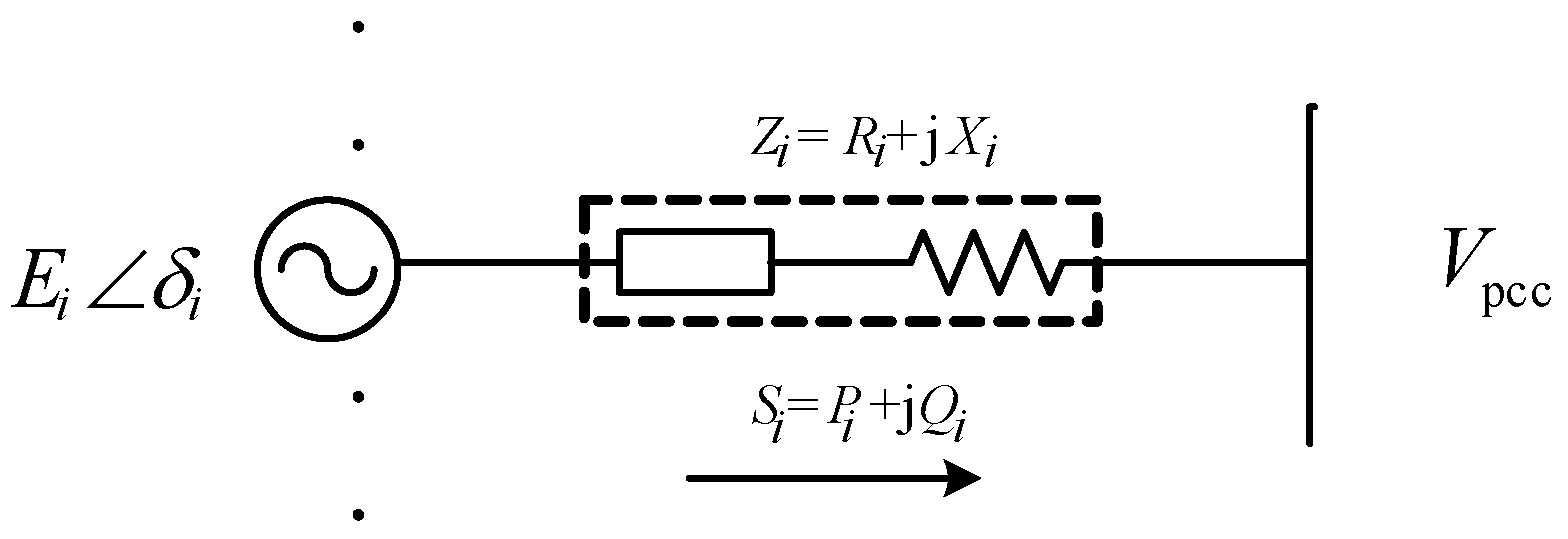
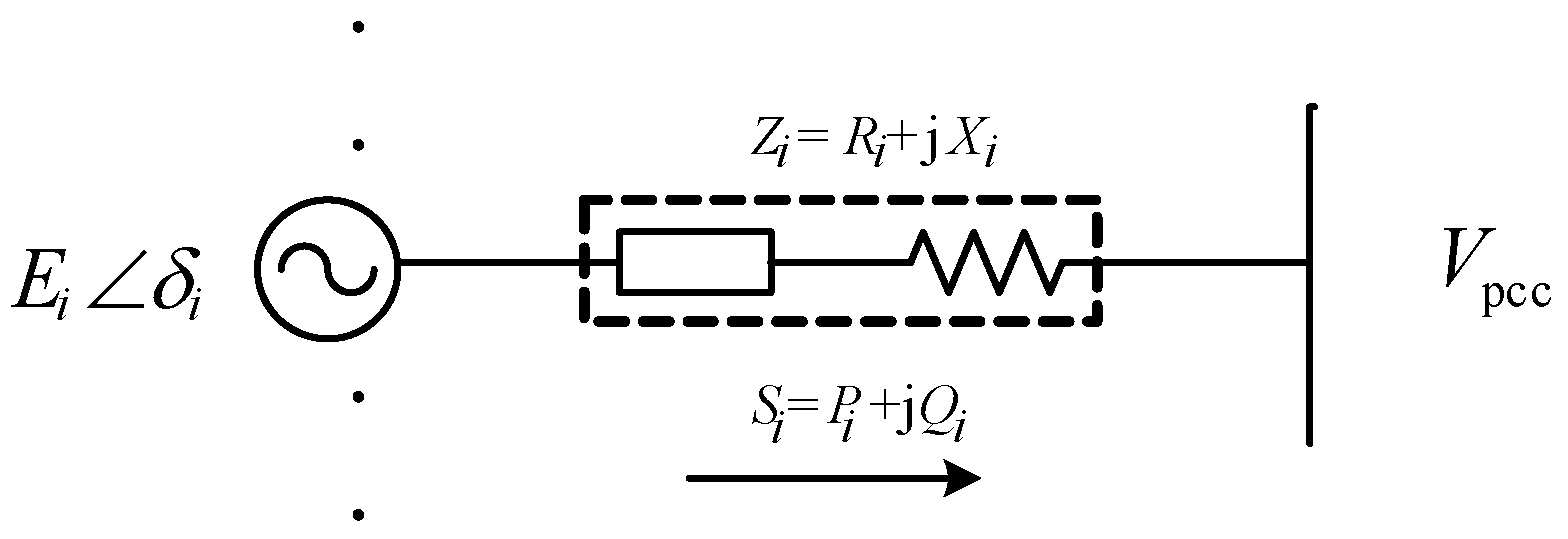
2. Power Sharing with Droop Control
3. Reactive Power Sharing Based on Reactive Current Control
4. Adaptive Virtual Impedance Control Strategy Based on Consensus Control
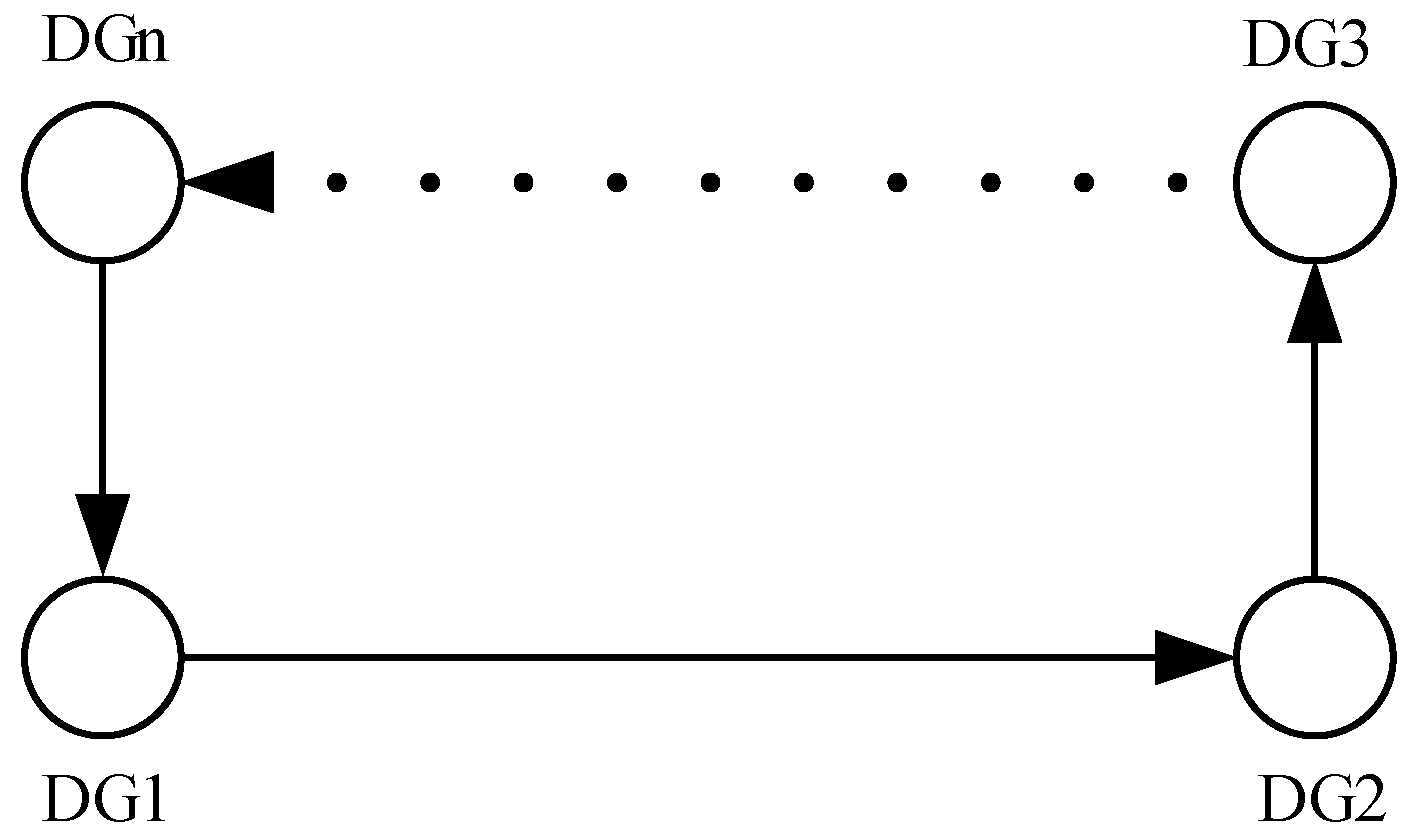
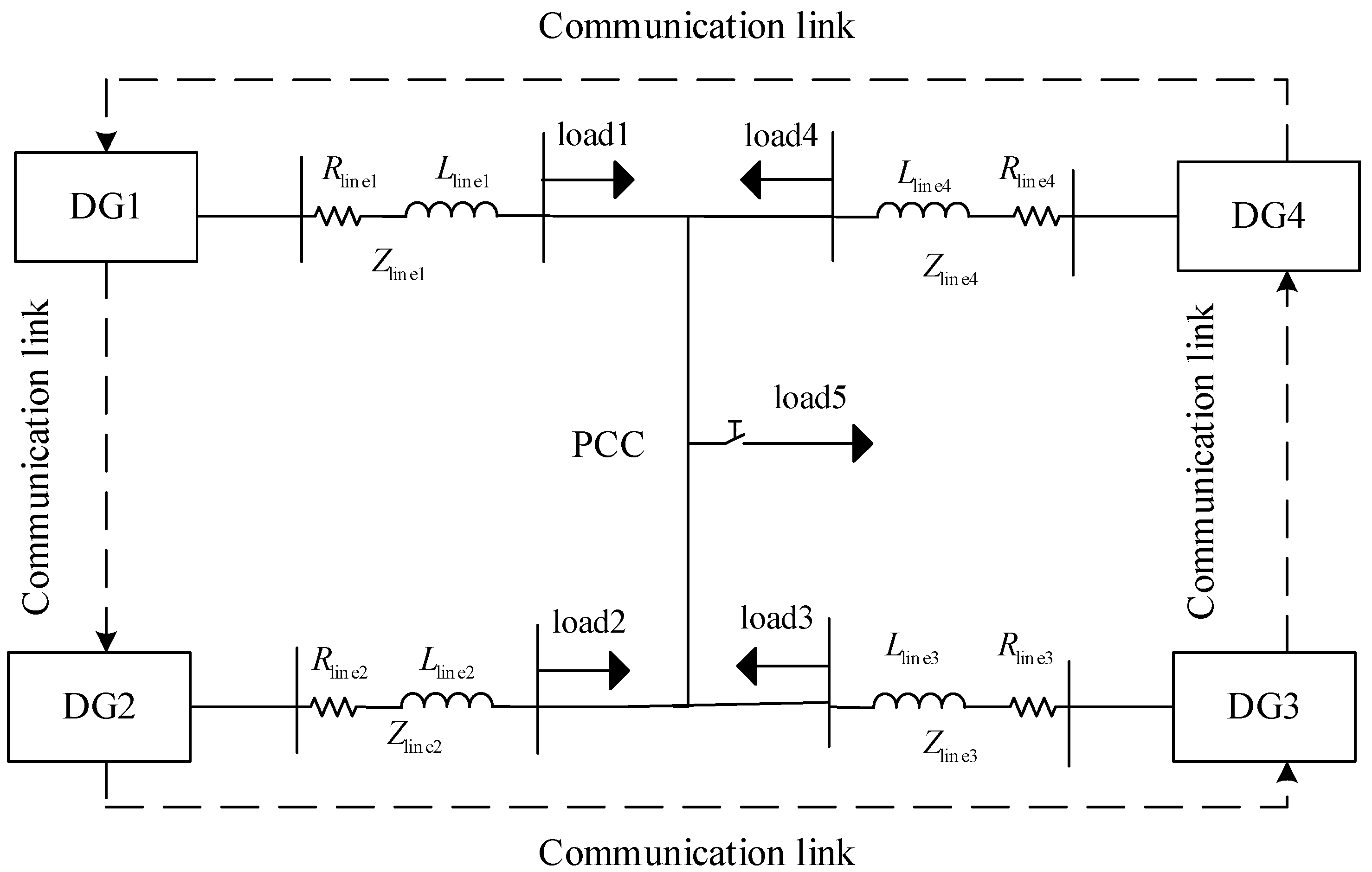
4.1. Microgrid Communication Topology
4.2. Consensus Control
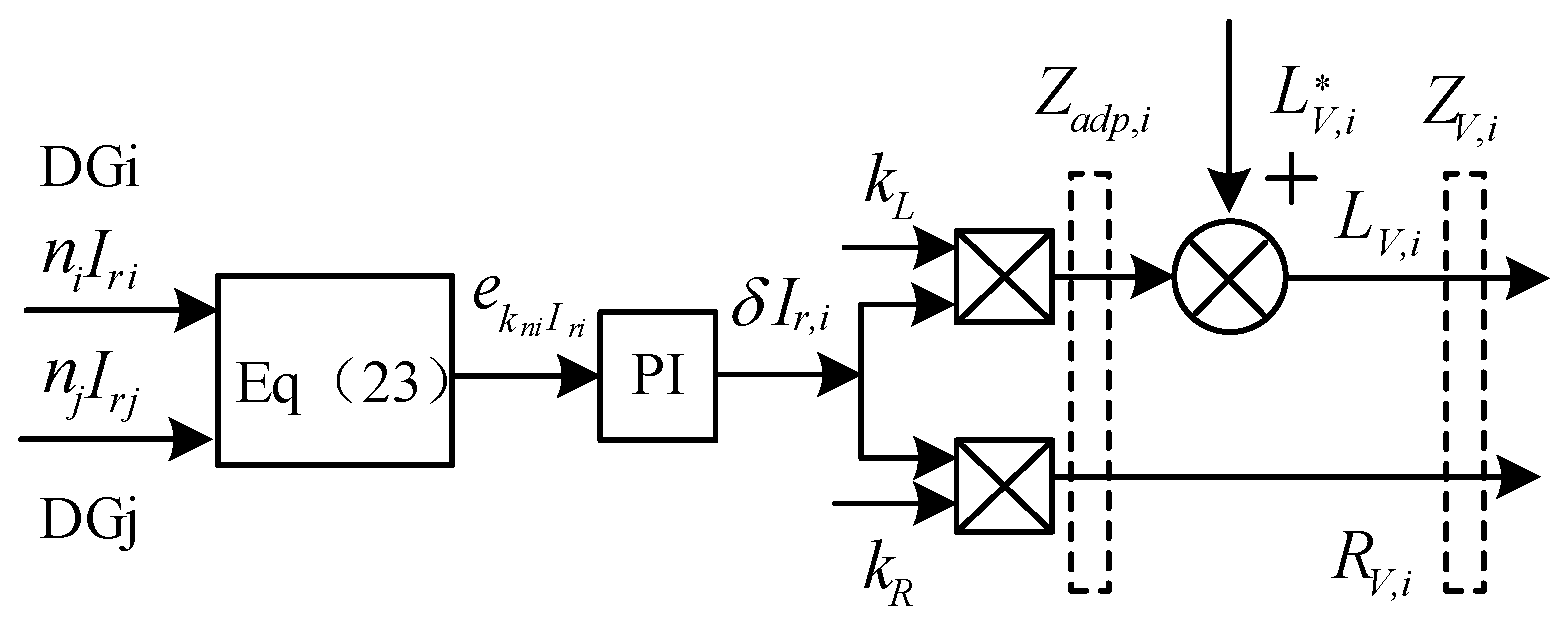
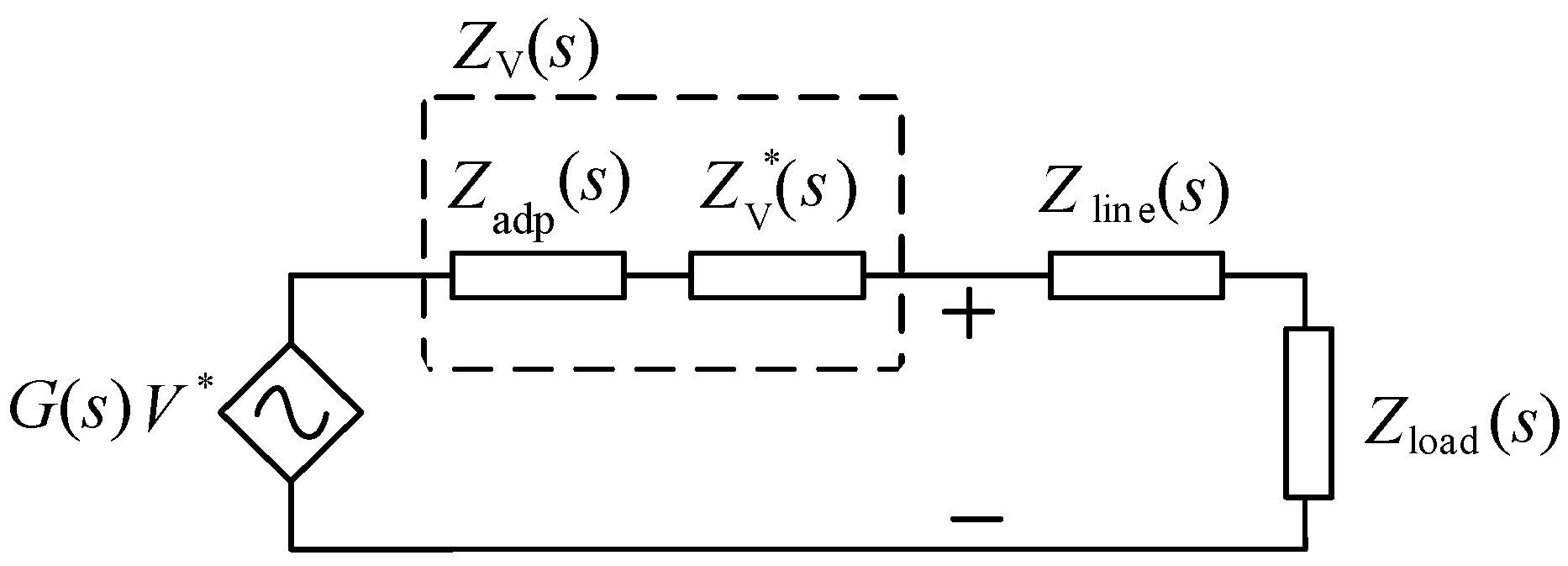
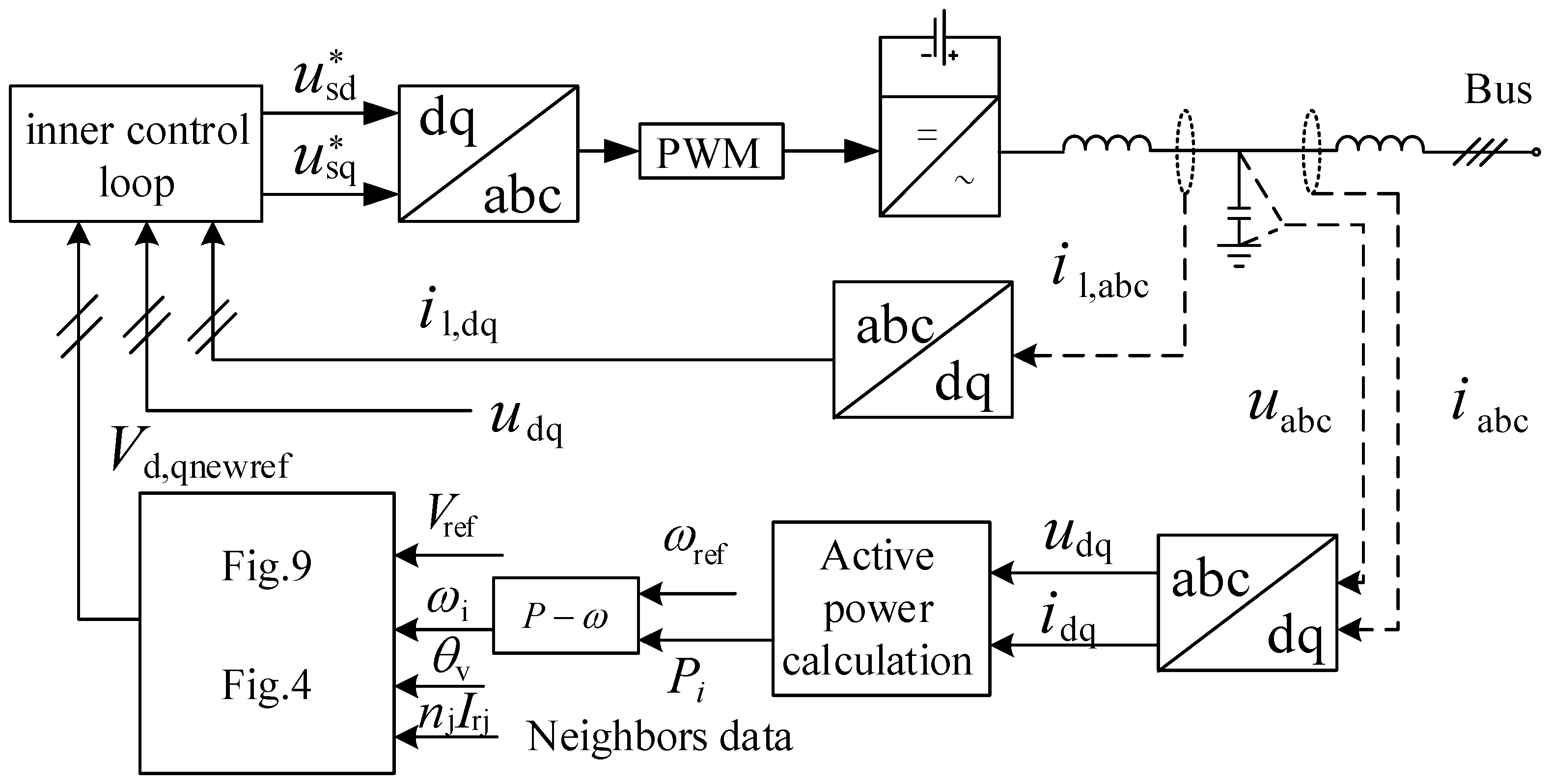
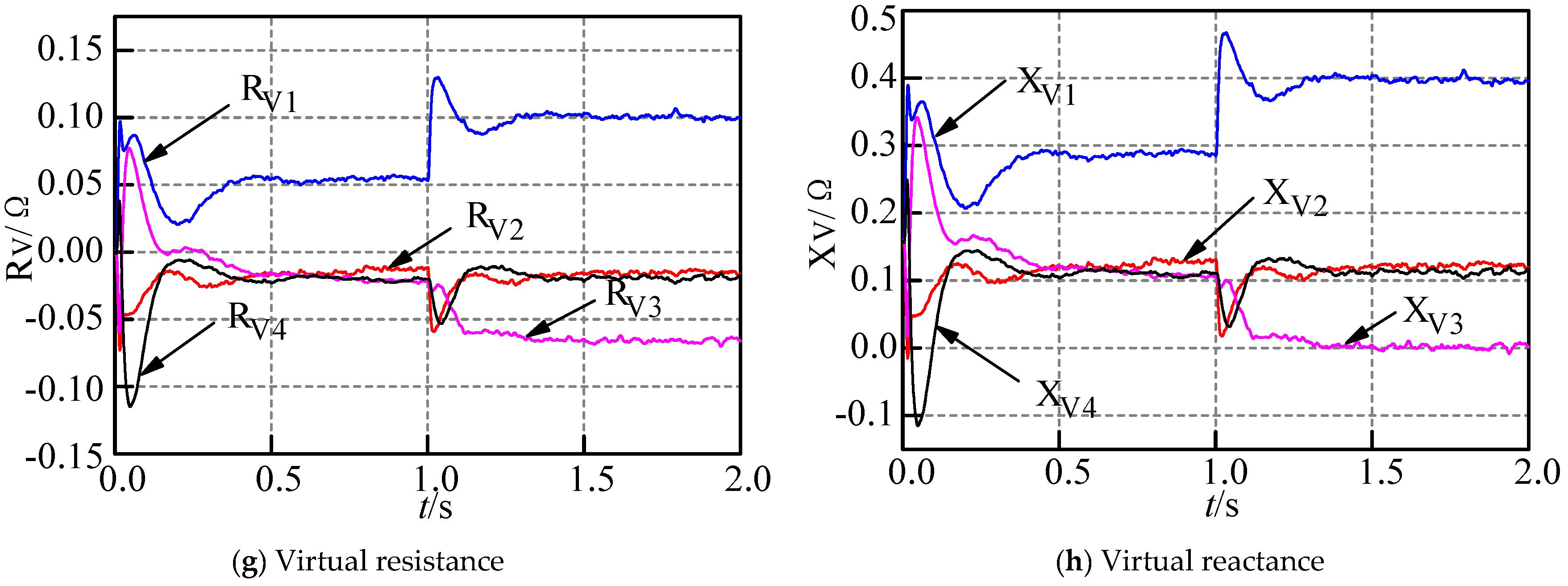
4.3. Method of Realizing Virtual Impedance
5. Reference Voltage Phase Shift Compensation Using Virtual Impedance Angle
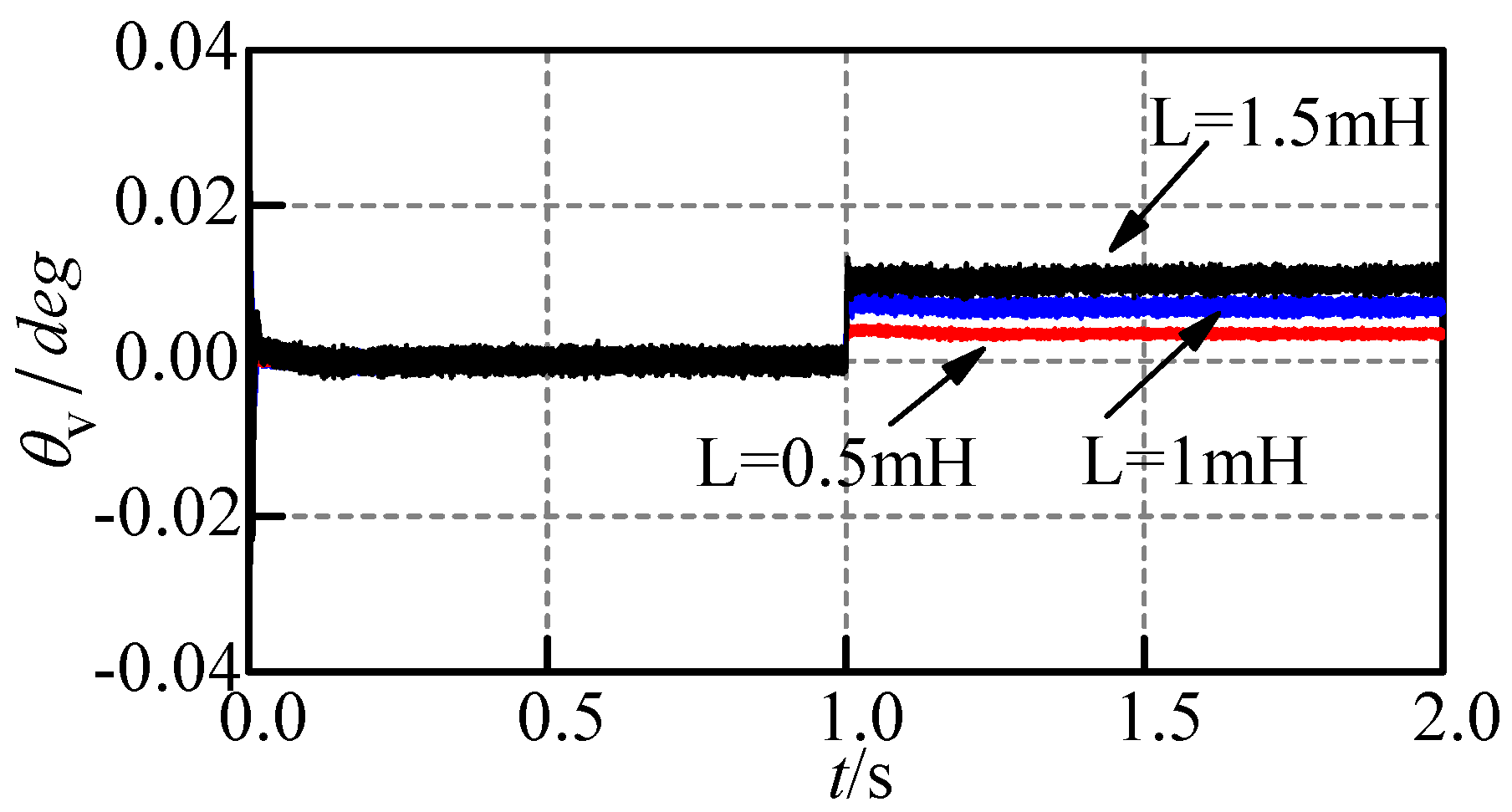
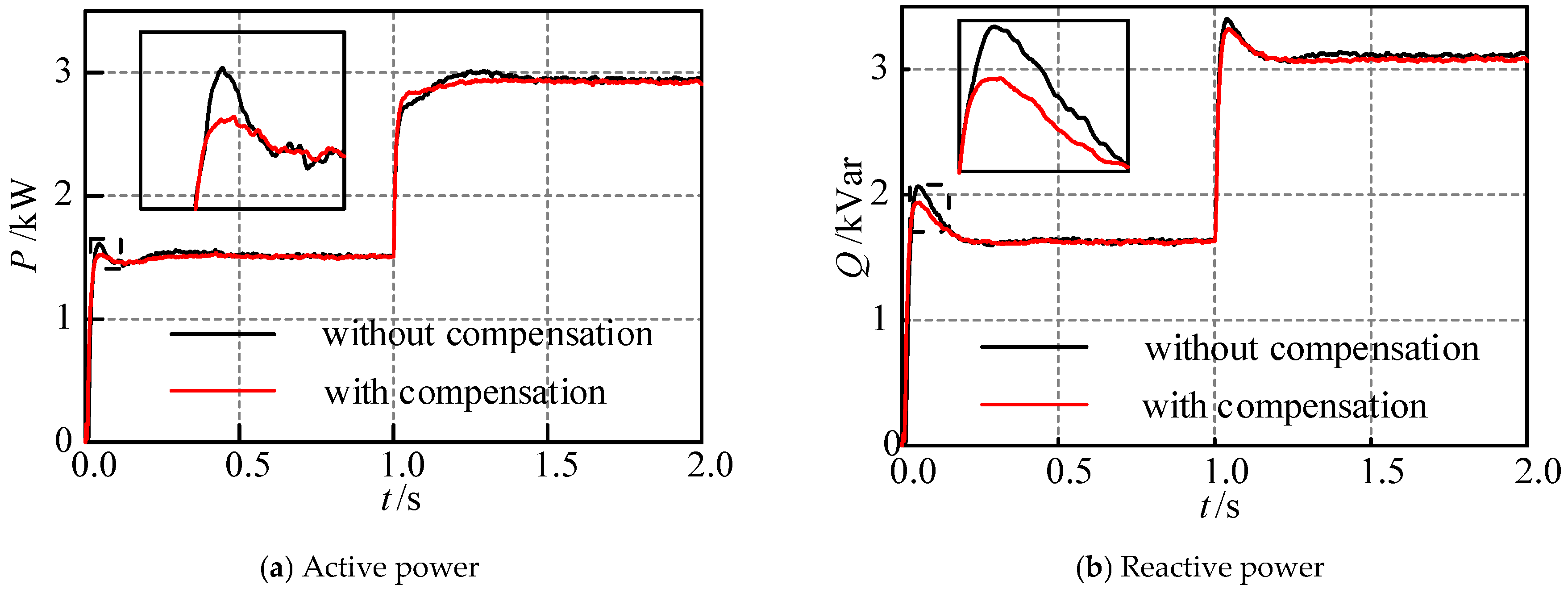
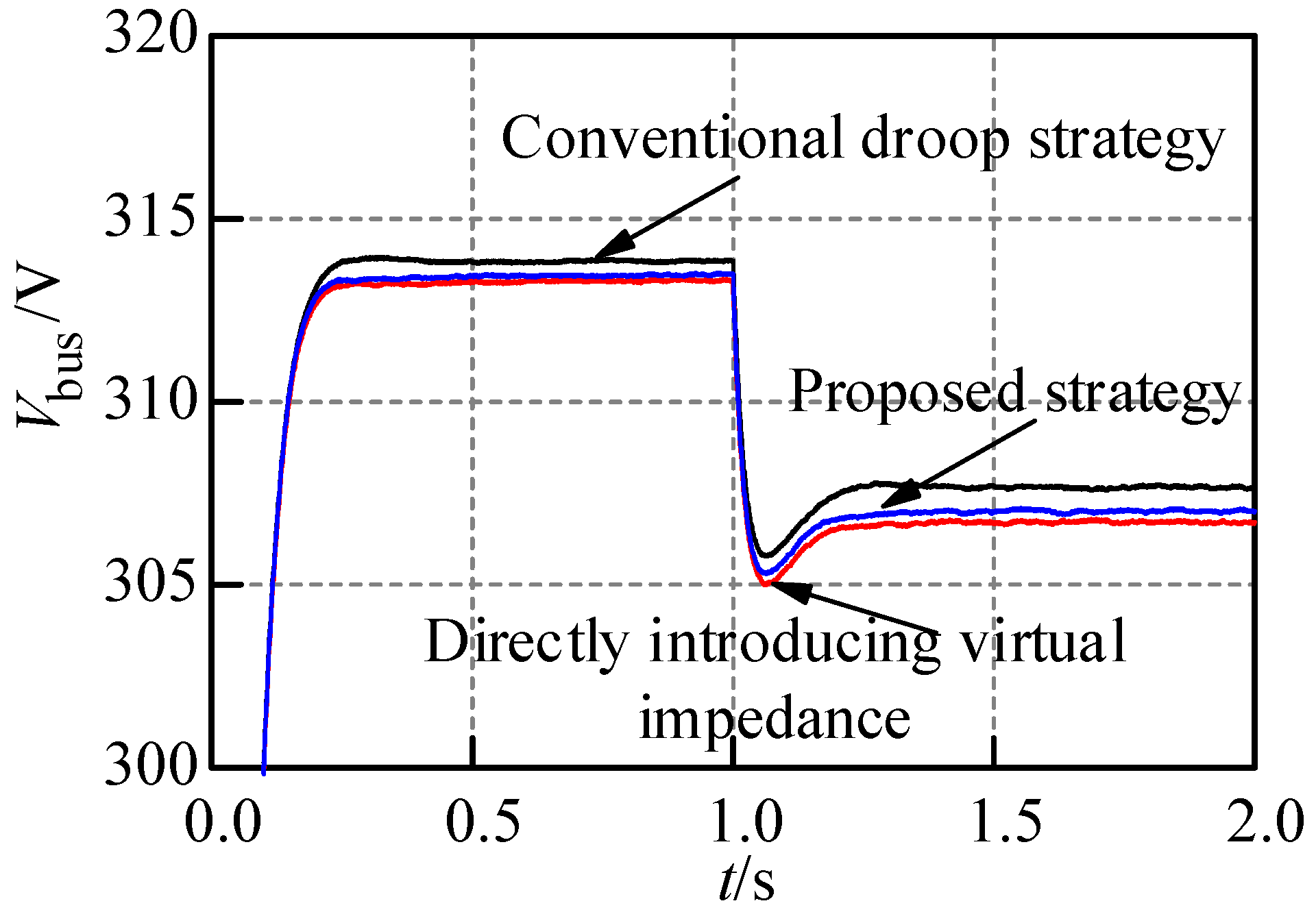
6. Simulation Results
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Zhang, B.; Yan, X.; Li, D.; Zhang, X.; Han, J.; Xiao, X. Stable operation and small-signal analysis of multiple parallel dg inverters based on a virtual synchronous generator scheme. Energies 2018, 11, 203. [Google Scholar] [CrossRef]
- Chan, R.; Kwak, S. Improved finite-control-set model predictive control for cascaded h-bridge inverters. Energies 2018, 11, 355. [Google Scholar] [CrossRef]
- Li, B.; Zhou, L.; Sciubba, E. Power decoupling method based on the diagonal compensating matrix for vsg-controlled parallel inverters in the microgrid. Energies 2017, 10, 2159. [Google Scholar]
- Yoon, S.J.; Lai, N.B.; Kim, K.H.; Sciubba, E. A systematic controller design for a grid-connected inverter with lcl filter using a discrete-time integral state feedback control and state observer. Energies 2018, 11, 437. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Zheng, H.; Wei, H.; Liao, R. Study on Quantitative Correlations between the Ageing Condition of Transformer Cellulose Insulation and the Large Time Constant Obtained from the Extended Debye Model. Energies 2017, 10, 1842. [Google Scholar] [CrossRef]
- Liu, J.; Zheng, H.; Zhang, Y.; Wei, H.; Liao, R. Grey Relational Analysis for Insulation Condition Assessment of Power Transformers Based Upon Conventional Dielectric Response Measurement. Energies 2017, 10, 1526. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Power management of an isolated hybrid AC/DC micro-grid with fuzzy control of battery banks. IET Renew. Power Gener. 2015, 9, 484–493. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Robust optimal power management system for a hybrid AC/DC micro-grid. IEEE Trans. Sustain. Energy 2015, 6, 675–687. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Fault-tolerant supervisory controller for a hybrid AC/DC micro-grid. IEEE Trans. Smart Grid 2018, 9, 2809–2823. [Google Scholar] [CrossRef]
- Yu, Z.; Ai, Q.; He, X.; Piao, L.; Sciubba, E. Adaptive droop control for microgrids based on the synergetic control of multi-agent systems. Energies 2017, 9, 1057. [Google Scholar] [CrossRef]
- Li, Z.; Zang, C.; Zeng, P.; Yu, H.; Li, H.; Li, S. Analysis of multi-agent-based adaptive droop-controlled ac microgrids with pscad. J. Power Electron. 2015, 15, 455–468. [Google Scholar] [CrossRef]
- Li, D.; Zhao, B.; Wu, Z.; Zhang, X.; Zhang, L. An improved droop control strategy for low-voltage microgrids based on distributed secondary power optimization control. Energies 2017, 10, 1347. [Google Scholar] [CrossRef]
- Sun, X.; Yang, Y.; Zhao, W.; Shen, H.; Tan, G. An adaptive droop control method for inverters in microgrid. Power Syst. Technol. 2014, 38, 2386–2391. [Google Scholar]
- Vasquez, J.C.; Guerrero, J.M.; Luna, A.; Rodriguez, P.; Teodorescu, R. Adaptive droop control applied to voltage-source inverters operating in grid-connected and islanded modes. IEEE Trans. Ind. Electron. 2009, 56, 4088–4096. [Google Scholar] [CrossRef]
- Chen, Y.; An, L.; Long, J.; Peng, Z.; Zhang, Q.; Zhipeng, L. Circulating current analysis and robust droop multiple loop control method for parallel inverters using resistive output impedance. Proc. CSEE 2013, 33, 18–29. [Google Scholar]
- W, Y.; An, L.; Jin, G. Improved robust droop multiple loop control for parallel inverters in microgrid. Trans. China Electrotech. Soc. 2015, 30, 116–123. [Google Scholar]
- He, J.; Li, Y.W.; Blaabjerg, F. An enhanced islanding microgrid reactive power, imbalance power, and harmonic power sharing scheme. IEEE Trans. Power Electron. 2015, 30, 3389–3401. [Google Scholar] [CrossRef]
- Lee, C.T.; Chu, C.C.; Cheng, P.T. A new droop control method for the autonomous operation of distributed energy resource interface converters. IEEE Trans. Power Electron. 2013, 28, 1980–1993. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. An enhanced microgrid load demand sharing strategy. IEEE Trans. Power Electron. 2012, 27, 3984–3995. [Google Scholar] [CrossRef]
- He, J.; Du, L.; Liang, B.; Li, Y.; Wang, C. Coupled-Virtual-Impedance Control for AC/DC Hybrid Microgrid Power Electronic Interlinking Unit with Dual Converters. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Dong, H.; Yuan, S.; Han, Z.; Cai, Z.; Jia, G.; Ge, Y. A Comprehensive Strategy for Accurate Reactive Power Distribution, Stability Improvement, and Harmonic Suppression of Multi-Inverter-Based Micro-Grid. Energies 2018, 11, 745. [Google Scholar] [CrossRef]
- Gupta, P.; Swarnkar, P. Intertied AC-DC Hybrid System Power Sharing Through Intelligent Droop Controller. Eng. Technol. Appl. Sci. Res. 2018, 8, 2609–2615. [Google Scholar]
- Yao, W.; Chen, M.; Matas, J.; Guerrero, J.M.; Qian, Z.M. Design and analysis of the droop control method for parallel inverters considering the impact of the complex impedance on the power sharing. IEEE Trans. Ind. Electron. 2011, 58, 576–588. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; Vicuna, L.G.D.; Castilla, M.; Miret, J. Decentralized control for parallel operation of distributed generation inverters using resistive output impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vicuña, L.G.D.; Matas, J.; Miret, J.; Castilla, M. Output impedance design of parallel-connected UPS inverters with wireless load-sharing control. IEEE Trans. Ind. Electron. 2005, 52, 1126–1135. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, Z.; Wang, S. Multiple feedback loop control scheme for inverters of the micro source in microgrids. Trans. China Electrotech. Soc. 2009, 24, 100–107. (In Chinese) [Google Scholar]
- Zhu, Y.; Zhuo, F.; Wang, F.; Liu, B.; Zhao, Y. A wireless load sharing strategy for islanded microgrid based on feeder current sensing. IEEE Trans. Power Electron. 2015, 30, 6706–6719. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. Analysis, design, and implementation of virtual impedance for power electronics interfaced distributed generation. IEEE Trans. Ind. Appl. 2011, 47, 2525–2538. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Guerrero, J.M.; Blaabjerg, F.; Vasquez, J.C. An islanding microgrid power sharing approach using enhanced virtual impedance control scheme. IEEE Trans. Power Electron. 2013, 28, 5272–5282. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Accurate reactive power sharing in an islanded microgrid using adaptive virtual impedances. IEEE Trans. Power Electron. 2015, 30, 1605–1617. [Google Scholar] [CrossRef]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed secondary control for islanded microgrids—A novel approach. IEEE Trans. Power Electron. 2014, 29, 1018–1031. [Google Scholar] [CrossRef]
- Micallef, A.; Apap, M.; Spiteri-Staines, C.; Guerrero, J.M.; Vasquez, J.C. Reactive power sharing and voltage harmonic distortion compensation of droop controlled single phase islanded microgrids. IEEE Trans. Smart Grid 2014, 5, 1149–1158. [Google Scholar] [CrossRef]
- Zhang, H.; Kim, S.; Sun, Q.; Zhou, J. Distributed adaptive virtual impedance control for accurate reactive power sharing based on consensus control in microgrids. IEEE Trans. Smart Grid 2017, 8, 1749–1761. [Google Scholar] [CrossRef]
- Qian, G.; Lin, L.; Hongyan, W.U.; Bai, Z.; Hao, M.A. Distributed power control strategy for microgrids considering adaptive virtual impedance. Autom. Electr. Power Syst. 2016, 40, 23–29. (In Chinese) [Google Scholar]
- Long, J.; Xing, H.; Wu, X. Research on improved microsource droop control method. Trans. China Electrotech. Soc. 2014, 29, 145–152. (In Chinese) [Google Scholar]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A voltage and frequency droop control method for parallel inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Qu, Z. Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener. Transm. Dis. 2013, 7, 822–831. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]
- El Boubakri, A. Analysis of the performance of droop controlled inverters in mini-grids. Electr. Comput. Eng. 2013, 82–150. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vdc/V | L/mH | C/μF | K | Kvp | Kvi |
|---|---|---|---|---|---|
| 800 | 0.6 | 1500 | 5 | 10 | 100 |
| LV/mH | Vdc/V | L/mH | C/μF | K | Kvp | Kvi |
|---|---|---|---|---|---|---|
| 0.8 | 800 | 0.6 | 1500 | 5 | 10 | 100 |
| Parameter | ||
|---|---|---|
| Rated voltage | 220 V | |
| No-load frequency | 50.5 Hz | |
| Line impendences | Zl1 0.8 mΩ, 4.3 mH Zl2 0.6 mΩ, 4.3 mH Zl3 0.5 mΩ, 3 mH Zl4 0.4 mΩ, 2 mH | |
| Load | LD1: 1.5 kW, 1.5 kVar LD2: 3 kW, 3 kVar LD3: 4 kW, 4 kVar LD4: 4 kW, 4 kVar LOAD5: 12.5 kW, 12.5 kVar | |
| Control parameters | ||
| Droop coefficient | m1/1.5 = m2/3 = m3/4 = m4/4 = 1 × 10−5 n1/1.5 = n2/3 = n3/4 = n4/4 = (2/3) × 10−4 kn1/1.5 = kn2/3 = kn3/4 = kn4/4 = 2/30 | |
| PI parameter | DP = 0.01 | DI = 5 |
| Coupling gain CIr | 7.5 | |
| Static virtual inductance | 0.5 × 10−3 H | |
| Gain of adaptive virtual impedance | kR = 1.5 × 10−4, kL = 0.02 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, Z.; Wei, Q.; Zhang, Y.; Zhao, J.; Manla, E. Adaptive Virtual Impedance Droop Control Based on Consensus Control of Reactive Current. Energies 2018, 11, 1801. https://doi.org/10.3390/en11071801
Lyu Z, Wei Q, Zhang Y, Zhao J, Manla E. Adaptive Virtual Impedance Droop Control Based on Consensus Control of Reactive Current. Energies. 2018; 11(7):1801. https://doi.org/10.3390/en11071801
Chicago/Turabian StyleLyu, Zhilin, Qing Wei, Yiyi Zhang, Junhui Zhao, and Emad Manla. 2018. "Adaptive Virtual Impedance Droop Control Based on Consensus Control of Reactive Current" Energies 11, no. 7: 1801. https://doi.org/10.3390/en11071801
APA StyleLyu, Z., Wei, Q., Zhang, Y., Zhao, J., & Manla, E. (2018). Adaptive Virtual Impedance Droop Control Based on Consensus Control of Reactive Current. Energies, 11(7), 1801. https://doi.org/10.3390/en11071801