AC Ship Microgrids: Control and Power Management Optimization

 , , , and
, , , and 
Abstract
1. Introduction
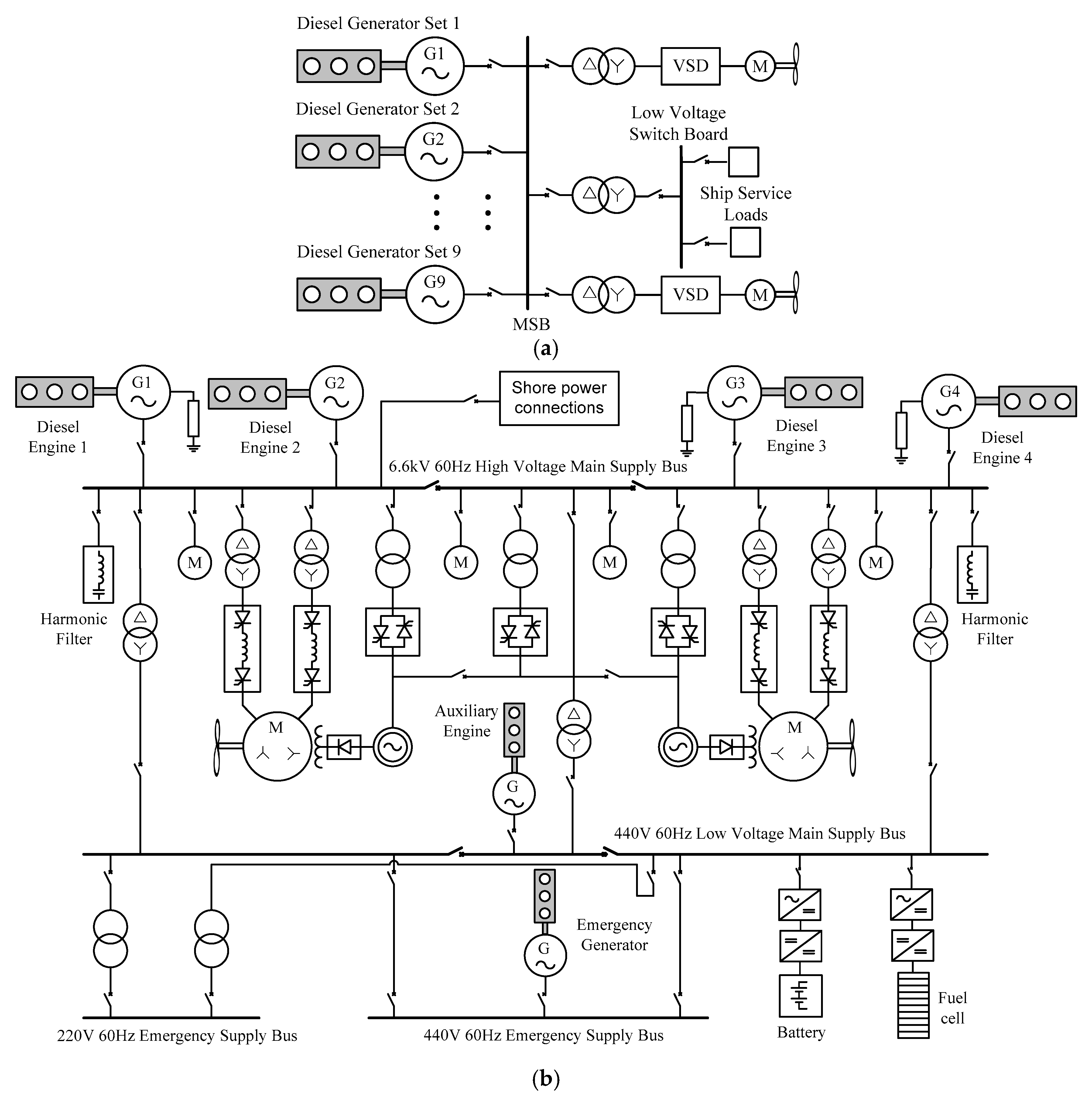
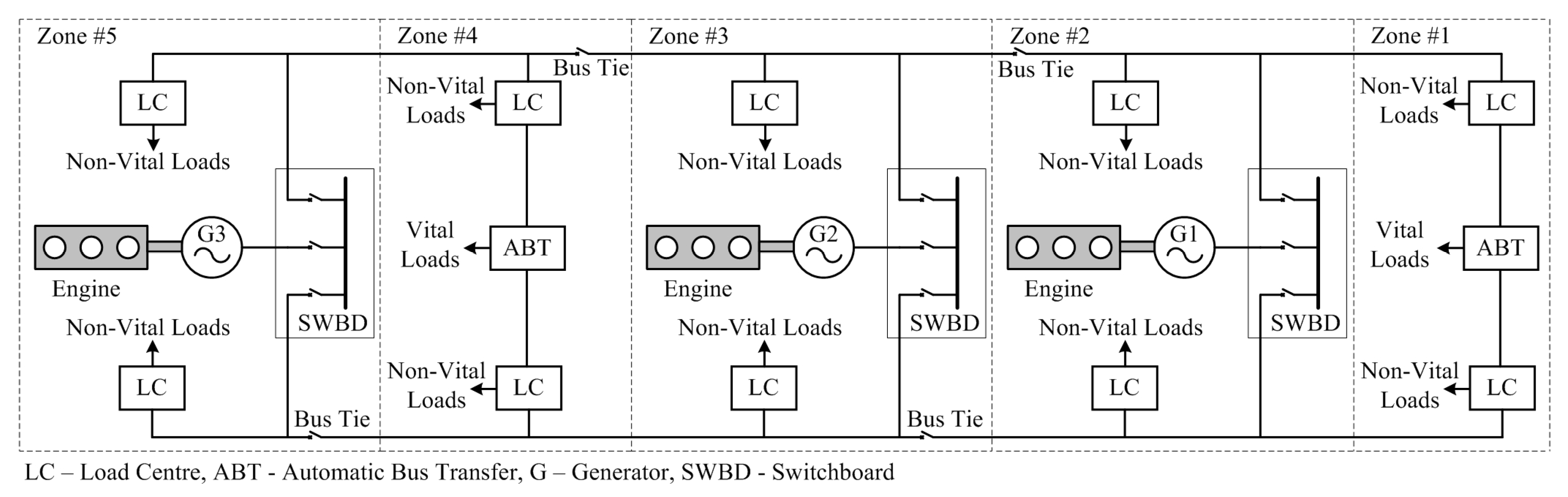
2. Shipboard AC Power System Architectures
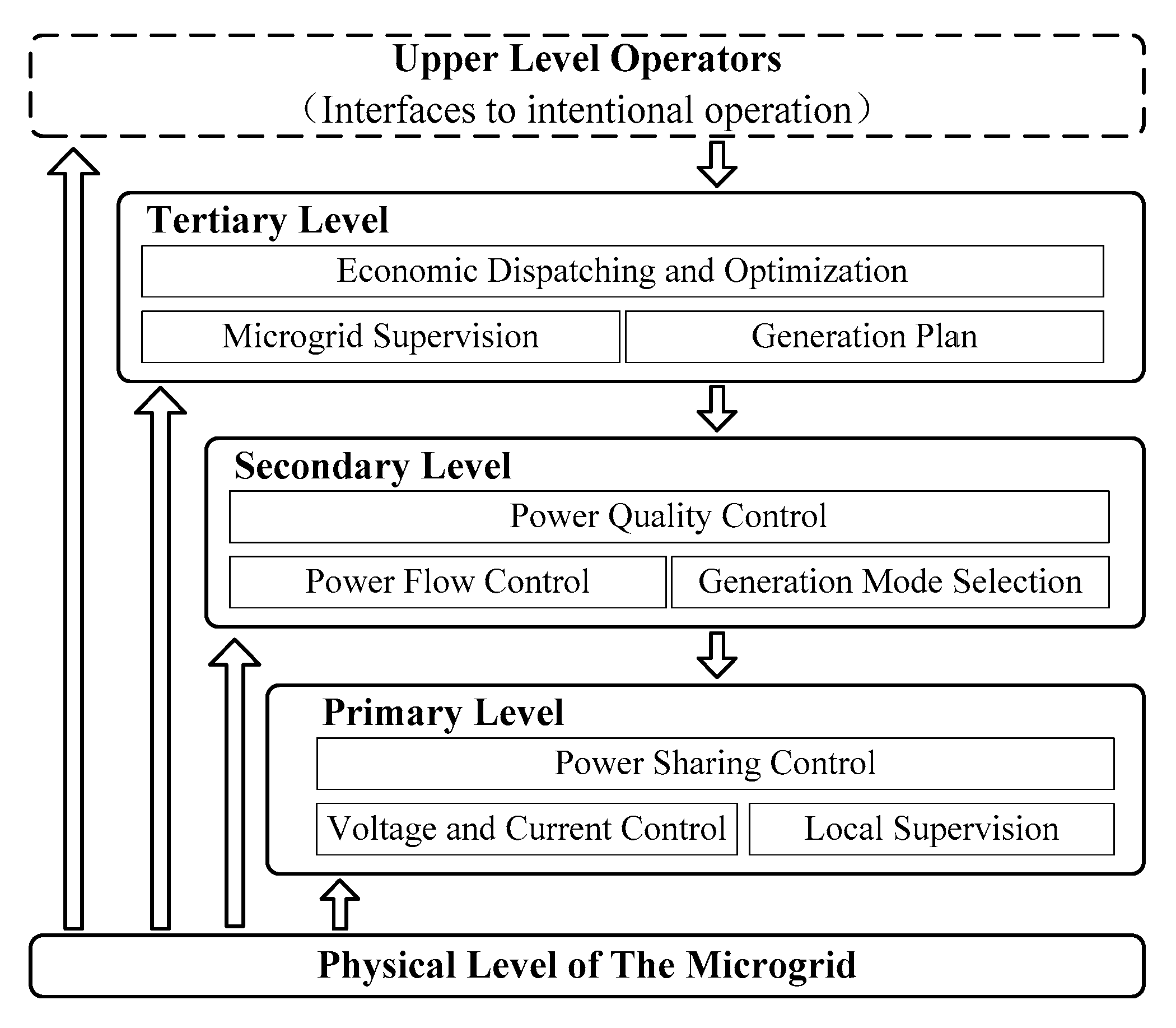
3. Control Technologies
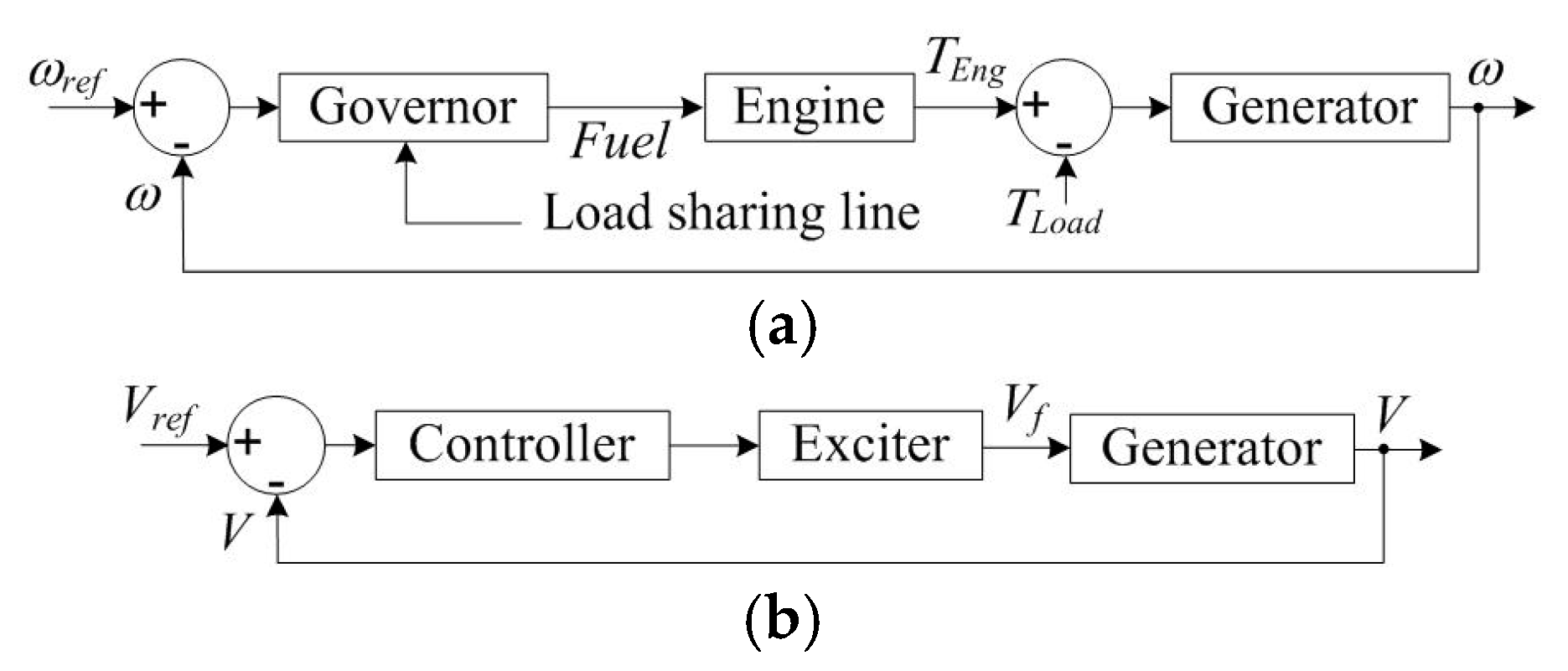
3.1. Isochronous Control
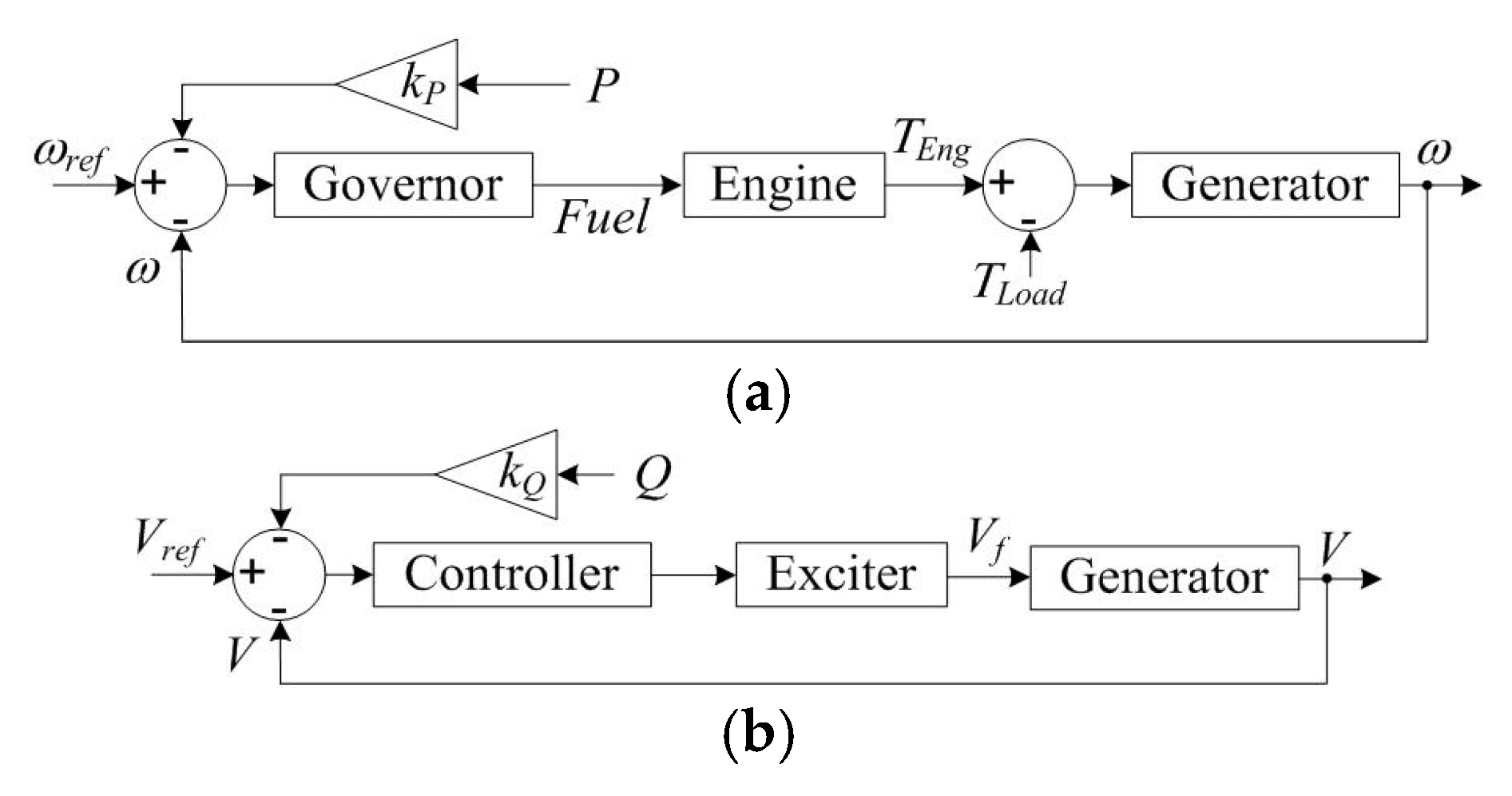
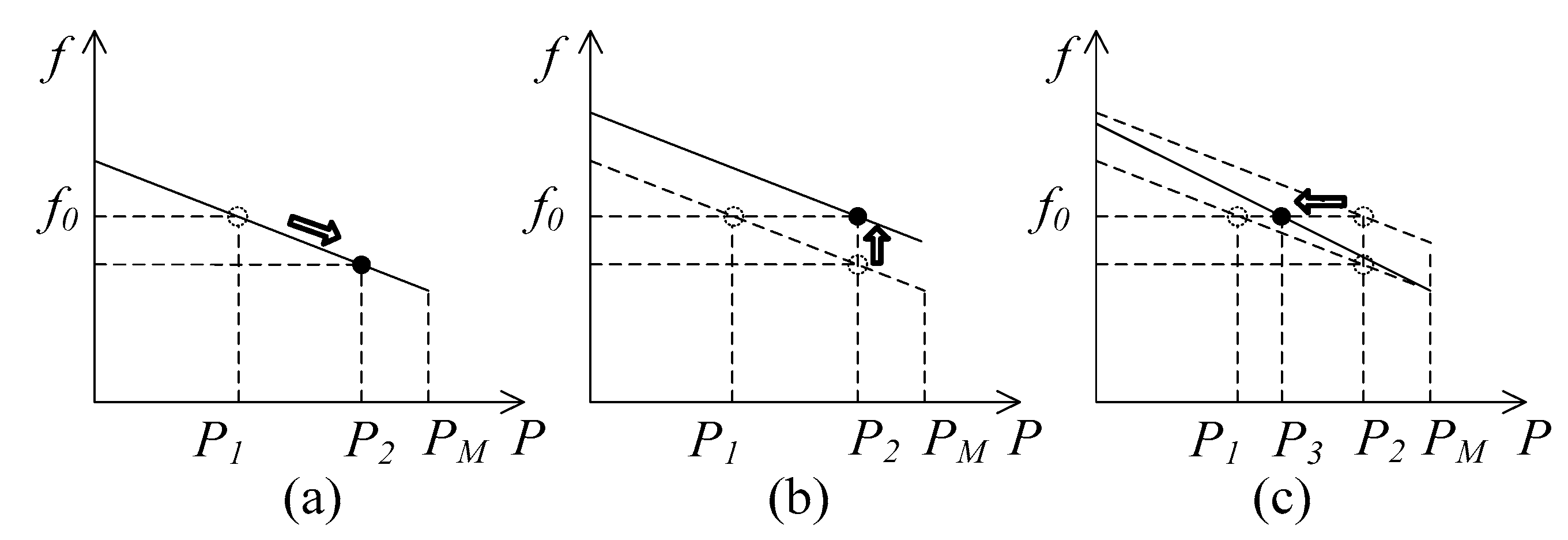
3.2. Droop Control
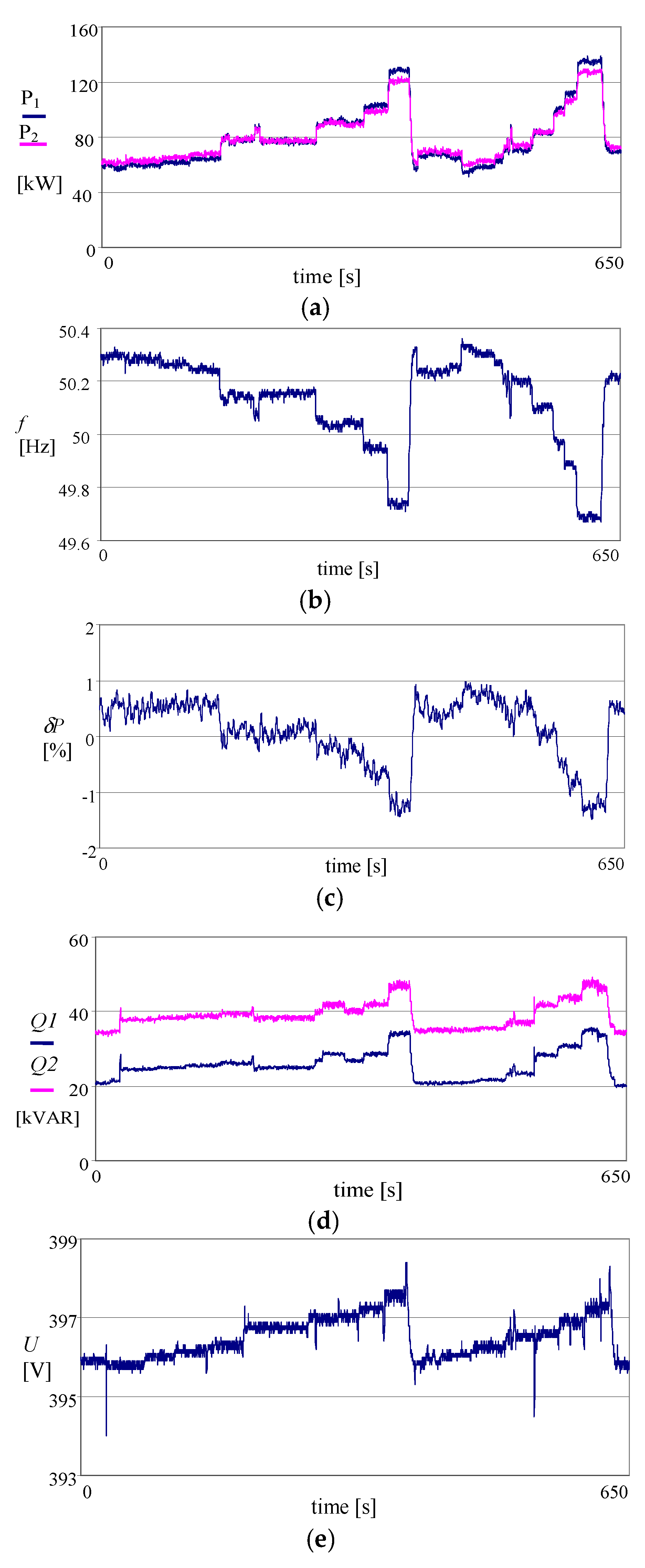
3.3. Application of Droop Control—Tests in a Real Ship
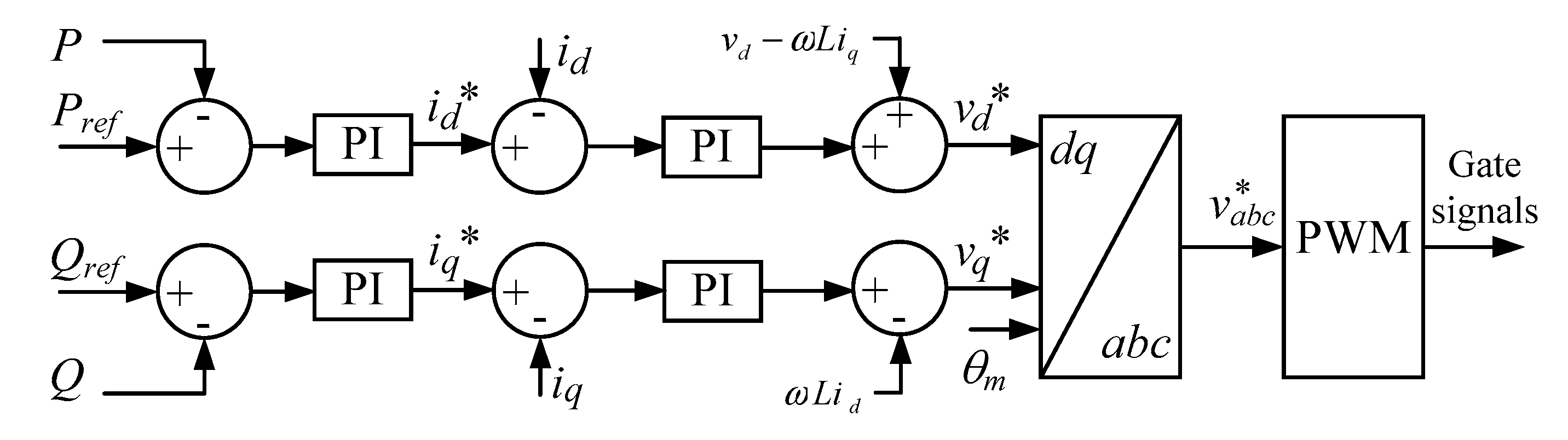
3.4. Grid-feeding Power Converter Control
4. Power Management Optimization
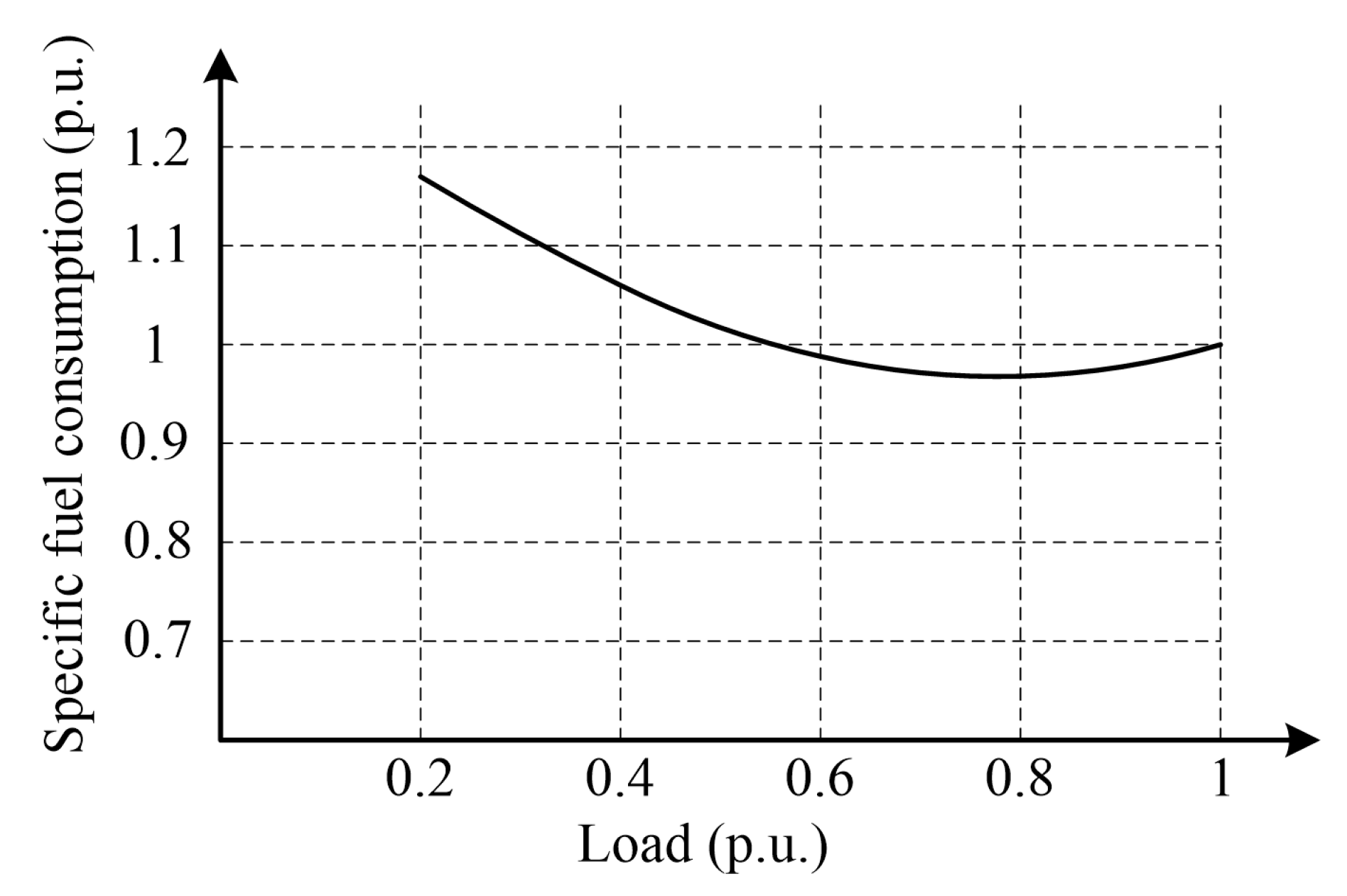
- Energy saving: Energy savings can be presented in the three following ways: reduction in specific fuel consumption (SFC), reduction in propulsion fuel consumption, and reduction in overall vessel fuel consumption.
- Automatic start/stop/standby of auxiliary generators: Generators are operated depending on power consumption. A surplus of available power should be limited as much as possible from safety point of view. The PMS constantly compares the total generator load against the load dependent automatic start/stop limits. If the available power minus safety margin is less than the required power, either due to increase in load or fault in a running generator set, the PMS will automatically start the next standby generator set in the start sequence. When the load decreases to a level that will not overload the remaining generators, the standby generator will stop and disconnect.
- Automatic load sharing: When the load increases, another generator is connected to the switchboard. PMS divides the load in an optimal manner on generators after synchronizing.
- Load shedding: When a sudden loss of a generator or load increase occurs, leading to an overload of other generators, non-essential loads are automatically disconnected by the PMS. For example, thrusters can operate with reduced load in dynamic positioning for a period of time because of the slow response of the ship with respect to position and handling. This period is sufficient to get the next unit on-line and increase the power generating capacity. According to [50], the PMS “is to prevent overloading of the generators and maintain power to the essential loads such as propulsion load by shedding non-essential loads.”
- Automatic synchronizing and system restoration: Automatic synchronizing is performed in order to ensure generators are running at required speed, voltage, and phase. After a blackout, the system is required to follow the sequence control of a start-up and reconfiguration of the power system, which includes starting and synchronizing generator sets and sequential starts of loads.
- Monitoring and load analysis illustration: The PMS consist of a monitoring system to monitor the load profile, active and reactive load sharing monitoring to monitor the load sharing failure, fuel consumption monitoring, graphically displayed information that can help operators to target wasted energy, and engine performance monitoring. Additionally, some PMS monitoring systems provide historical data to help make decisions on the maintenance and operation of machinery and other ship power system components [48].
- Load transfer: The PMS can control and monitor the load transfer from shaft to auxiliary and vice versa in hybrid electric ships, and shore power to auxiliary in cold ironing [60].
5. Concluding Remarks and Future Trends in Ship Microgrids
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A. Power Management Constraints
| VL | Voltage limit | F | Frequency |
| SC | Source capacity | PCC | Power Converter Capacity |
| PB | Power Balance | OT | Operating time of Gen. |
| GHG | Greenhouse gas emission | SS | Ship speed |
| TD | Travel distance | BP | Blackout Prevention |
| RR | Ramp Rates | GSS | Generator start/stop |
| ESS | Energy Storage System level (charge/discharge) | LL | Load level/Limit |
| SI | Stability index (transient angle stability index) | CC | Cable/branch current |
| PG | Power Generation limit | BC | Bus current |
References
- García-Olivares, A.; Solé, J.; Osychenko, O. Transportation in a 100% renewable energy system. Energy Convers. Manag. 2018, 158, 266–285. [Google Scholar] [CrossRef]
- Castellan, S.; Menis, R.; Tessarolo, A.; Luise, F.; Mazzuca, T. A review of power electronics equipment for all-electric ship MVDC power systems. Int. J. Electr. Power Energy Syst. 2018, 96, 306–323. [Google Scholar] [CrossRef]
- Skjong, E.; Rødskar, E.; Molinas, M.; Johansen, T.; Cunningham, J. The marine vessel’s electrical power system: From its birth to present day. Proc. IEEE 2015, 103, 2410–2424. [Google Scholar] [CrossRef]
- Jayasinge, S.; Lokuketagoda, G.; Enshaei, H.; Shagar, V.; Ranmuthugala, D. Electro-technologies for energy efficiency improvement and low carbon emission in maritime transport. In Proceedings of the 16th Annual General Assembly of the International Association of Maritime Universities, Opatija, Croatia, 7–10 October 2015; pp. 119–123. [Google Scholar]
- Sciberras, E.A.; Zahawi, B.; Atkinson, D.J. Reducing shipboard emissions—Assessment of the role of electrical technologies. Transp. Res. Part D Transp. Environ. 2017, 51, 227–239. [Google Scholar] [CrossRef]
- Lan, H.; Dai, J.; Wen, S.; Hong, Y.-Y.; Yu, D.; Bai, Y. Optimal Tilt Angle of Photovoltaic Arrays and Economic Allocation of Energy Storage System on Large Oil Tanker Ship. Energies 2015, 8, 11515–11530. [Google Scholar] [CrossRef]
- Han, J.; Charpentier, J.-F.; Tang, T. An Energy Management System of a Fuel Cell/Battery Hybrid Boat. Energies 2014, 7, 2799–2820. [Google Scholar] [CrossRef]
- Geertsma, R.D.; Negenborn, R.R.; Visser, K.; Hopman, J.J. Design and control of hybrid power and propulsion systems for smart ships: A review of developments. Appl. Energy 2017, 194, 30–54. [Google Scholar] [CrossRef]
- Andreasen, J.; Meroni, A.; Haglind, F. A Comparison of Organic and Steam Rankine Cycle Power Systems for Waste Heat Recovery on Large Ships. Energies 2017, 10, 547. [Google Scholar] [CrossRef]
- Shagar, V.; Jayasinghe, S.G.; Enshaei, H. Effect of load changes on hybrid shipboard power systems and energy storage as a potential solution: A review. Inventions 2017, 2, 21. [Google Scholar] [CrossRef]
- Vu, T.V.; Gonsoulin, D.; Diaz, F.; Edrington, C.S.; El-Mezyani, T. Predictive Control for Energy Management in Ship Power Systems Under High-Power Ramp Rate Loads. IEEE Trans. Energy Convers. 2017, 32, 788–797. [Google Scholar] [CrossRef]
- Gonsoulin, D.; Vu, T.; Diaz, F.; Vahedi, H.; Perkins, D.; Edrington, C. Centralized MPC for Multiple Energy Storages in Ship Power Systems. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017. [Google Scholar]
- Gonsoulin, D.E.; Vu, T.V.; Diaz, F.; Vahedi, H.; Perkins, D.; Edrington, C.S. Coordinating Multiple Energy Storages Using MPC for Ship Power Systems. In Proceedings of the 2017 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 14–17 August 2017. [Google Scholar]
- Crider, J.M.; Sudhoff, S.D. Reducing impact of pulsed power loads on microgrid power systems. IEEE Trans. Smart Grid 2010, 1, 270–277. [Google Scholar] [CrossRef]
- Kelley, J.P.; Wetz, D.A.; Reed, J.A.; Cohen, I.J.; Turner, G.K.; Lee, W.-J. The impact of power quality when high power pulsed DC and continuous AC loads are simultaneously operated on a MicroGrid testbed. In Proceedings of the 2013 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 22–24 April 2013; pp. 6–12. [Google Scholar]
- Hebner, R.E.; Davey, K.; Herbst, J.; Hall, D.; Hahne, J.; Surls, D.D.; Ouroua, A. Dynamic load and storage integration. Proc. IEEE 2015, 103, 2344–2354. [Google Scholar] [CrossRef]
- Hou, J.; Sun, J.; Hofmann, H. Control development and performance evaluation for battery/flywheel hybrid energy storage solutions to mitigate load fluctuations in all-electric ship propulsion systems. Appl. Energy 2018, 212, 919–930. [Google Scholar] [CrossRef]
- McCoy, T.J. Electric Ships Past, Present, and Future [Technology Leaders]. IEEE Electrification Mag. 2015, 3, 4–11. [Google Scholar] [CrossRef]
- Sudhoff, S.D.; Pekarek, S.D.; Swanson, R.R.; Duppalli, V.S.; Horvath, D.C.; Kasha, A.E.; Lin, R.; Marquet, B.D.; O’Regan, P.R.; Suryanarayana, H.; Yan, Y. A Reduced Scale Naval DC Microgrid to Support Electric Ship Research and Development. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015; pp. 464–471. [Google Scholar]
- Mashayekh, S.; Butler-Purry, K.L. An Integrated Security-Constrained Model-Based Dynamic Power Management Approach for Isolated Microgrids in All-Electric Ships. IEEE Trans. Power Syst. 2015, 30, 2934–2945. [Google Scholar] [CrossRef]
- Elsayed, A.T.; Mohamed, A.A.; Mohammed, O.A. DC microgrids and distribution systems: An overview. Electr. Power Syst. Res. 2015, 119, 407–417. [Google Scholar] [CrossRef]
- Al-Falahi, M.D.; Jayasinghe, S.; Enshaei, H. A review on recent size optimization methodologies for standalone solar and wind hybrid renewable energy system. Energy Convers. Manag. 2017, 143, 252–274. [Google Scholar] [CrossRef]
- Al-Falahi, M.D.; Nimma, K.S.; Jayasinghe, S.; Enshaei, H. Sizing and modeling of a standalone hybrid renewable energy system. In Proceedings of the IEEE Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar]
- Jayasinghe, S.G.; Meegahapola, L.; Fernando, N.; Jin, Z.; Guerrero, J.M. Review of ship microgrids: System architectures, storage technologies and power quality aspects. Inventions 2017, 2, 4. [Google Scholar] [CrossRef]
- Jin, Z.; Savaghebi, M.; Vasquez, J.C.; Meng, L.; Guerrero, J.M. Maritime DC Microgrids-A Combination of Microgrid Technologies and Maritime Onboard Power System for Future Ships. In Proceedings of the 2016 8th International Power Electronics and Motion Control Conference-Ecce Asia (IPEMC 2016-ECCE Asia), Hefei, China, 22–26 May 2016. [Google Scholar]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Liang, J.; Qi, L.; Lindtjørn, J.O.; Wendt, F. Frequency Dependent DC Voltage Droop Control for Hybrid Energy Storage in DC Microgrids. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Farasat, M.; Arabali, A.S.; Trzynadlowski, A.M. A novel control principle for all-electric ship power systems. In Proceedings of the 2013 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 22–24 April 2013; pp. 178–184. [Google Scholar]
- Shang, C.; Srinivasan, D.; Reindl, T. Economic and Environmental Generation and Voyage Scheduling of All-Electric Ships. IEEE Trans. Power Syst. 2015, 31, 4087–4096. [Google Scholar] [CrossRef]
- Nasri, M.; Hossain, M.R.; Ginn, H.L.; Moallem, M. Agent-based real-time coordination of power converters in a DC shipboard power system. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015; pp. 8–13. [Google Scholar]
- Paran, S.; Vu, T.; El Mezyani, T.; Edrington, C. MPC-based power management in the shipboard power system. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015; pp. 14–18. [Google Scholar]
- Tang, D.; Yan, X.; Yuan, Y.; Wang, K.; Qiu, L. Multi-agent Based Power and Energy Management System for Hybrid Ships. In Proceedings of the 2015 International Conference on Renewable Energy Research and Applications (ICRERA), Palermo, Italy, 22–25 November 2015; pp. 383–387. [Google Scholar]
- Shagar, V.; Jayasinghe, S.; Enshaei, H. Frequency Transient Suppression in Hybrid Electric Ship Power Systems: A Model Predictive Control Strategy for Converter Control with Energy Storage. Inventions 2018, 3, 13. [Google Scholar] [CrossRef]
- Pish, S.; Herbst, J.; Wardell, D.; Gattozzi, A.; Flynn, M. Power management and energy storage experiments on a MW-scale naval power system test-bed. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015; pp. 453–458. [Google Scholar]
- Rose, M.W.; Cuzner, R.M. Fault isolation and reconfiguration in a three-zone system. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015; pp. 409–414. [Google Scholar]
- Jin, Z.; Sulligoi, G.; Cuzner, R.; Meng, L.; Vasquez, J.C.; Guerrero, J.M. Next-Generation Shipboard DC Power System: Introduction Smart Grid and dc Microgrid Technologies into Maritime Electrical Netowrks. IEEE Electrification Mag. 2016, 4, 45–57. [Google Scholar] [CrossRef]
- Huang, K.; Srivastava, S.K.; Cartes, D.A.; Sun, L.-H. Market-based multiagent system for reconfiguration of shipboard power systems. Electr. Power Syst. Res. 2009, 79, 550–556. [Google Scholar] [CrossRef]
- Hall, D.T. Practical Marine Electrical Knowladge, 3rd ed.; Witherby Seamanship: Livingston, UK, 2014. [Google Scholar]
- Jin, Z.; Meng, L.; Guerrero, J.M.; Han, R. Hierarchical Control Design for a Shipboard Power System With DC Distribution and Energy Storage Aboard Future More-Electric Ships. IEEE Trans. Ind. Inform. 2018, 14, 703–714. [Google Scholar] [CrossRef]
- Hegner, H.; Desai, B. Integrated fight through power. In Proceedings of the 2002 IEEE Power Engineering Society Summer Meeting, Chicago, IL, USA, 21–25 July 2002; pp. 336–339. [Google Scholar]
- Khushalani, S.; Solanki, J.; Schulz, N. Optimized restoration of combined ac/dc shipboard power systems including distributed generation and islanding techniques. Electr. Power Syst. Res. 2008, 78, 1528–1536. [Google Scholar] [CrossRef]
- IEEE Std 45.3™-2015. IEEE Recommended Practice for Shipboard Electrical Installations—Systems Engineering; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Nelson, J.P.; Burns, D.; Seitz, R.; Leoni, A. The grounding of marine power systems: Problems and solutions. In Proceedings of the 2004 Fifty-First Annual Conference Petroleum and Chemical Industry Technical Conference, San Francisco, CA, USA, 13–15 September 2004; pp. 151–161. [Google Scholar]
- Papadimitriou, C.; Zountouridou, E.; Hatziargyriou, N. Review of hierarchical control in DC microgrids. Electr. Power Syst. Res. 2015, 122, 159–167. [Google Scholar] [CrossRef]
- Cosse, R.E.; Alford, M.D.; Hajiaghajani, M.; Hamilton, E.R. Turbine/generator governor droop/isochronous fundamentals—A graphical approach. In Proceedings of the 2011 Record of Conference Papers Industry Applications Society 58th Annual IEEE Petroleum and Chemical Industry Conference (PCIC), Toronto, ON, Canada, 19–21 September 2011; pp. 1–8. [Google Scholar]
- Olson, G. Paralleling Dissimilar Generators: Part 3—Load Sharing Compatibility. In White Paper; Cummins Power Generation: Ramsgate, UK, 2010. [Google Scholar]
- Johannessen, P.F.; Mathiesen, E. Advanced Failure Detection and Handling in Power Management System. In Proceedings of the Dynamic Positioning Committee, Kongsberg, Norway, 13–14 October 2009. [Google Scholar]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodr, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- DNV-GL. Rules for Classification. Ships. Part 4 Systems and Components; Chapter 8 Electrical Installations; DNV-GL: Oslo, Norway, 2016. [Google Scholar]
- International Naval Ships. Part 4 Vessel Systems and Machinery. In Guide for Building and Classing; ABS: Houston, TX, USA, 2016. [Google Scholar]
- Register, L.S. Rules and Regulations for Classification of Ships; Lloyd’s Register: London, UK, 2016. [Google Scholar]
- Vu, T.V.; Perkins, D.; Diaz, F.; Gonsoulin, D.; Edrington, C.S.; El-Mezyani, T. Robust adaptive droop control for DC microgrids. Electr. Power Syst. Res. 2017, 146, 95–106. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of Power Sharing Control Strategies for Islanding Operation of AC Microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Eid, B.M.; Rahim, N.A.; Selvaraj, J.; Khateb, A.H.E. Control Methods and Objectives for Electronically Coupled Distributed Energy Resources in Microgrids: A Review. IEEE Syst. J. 2016, 10, 446–458. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Ca, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Tarasiuk, T.; Pilat, A.; Szweda, M. Experimental Study on Impact of Ship Electric Power Plant Configuration on Power Quality in the Ship Power System. In Proceedings of the Proceedings of the World Congress on Engineering, London, UK, 2–4 July 2014. [Google Scholar]
- Liu, Y.; Zhang, Q.; Wang, C.; Wang, N. A control strategy for microgrid inverters based on adaptive three-order sliding mode and optimized droop controls. Electr. Power Syst. Res. 2014, 117, 192–201. [Google Scholar] [CrossRef]
- Cárdenas, R.; Juri, C.; Pena, R.; Wheeler, P.; Clare, J. The Application of Resonant Controllers to Four-Leg Matrix Converters Feeding Unbalanced or Nonlinear Loads. IEEE Trans. Power Electron. 2012, 27, 1120–1129. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Jayasinghe, S.G.; Al-Falahi, M.; Enshaei, H.; Fernando, N.; Tashakori, A. Floating power platforms for mobile cold-ironing. In Proceedings of the IEEE Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–5. [Google Scholar]
- Palma-Behnke, R.; Benavides, C.; Lanas, F.; Severino, B.; Reyes, L.; Llanos, J.; Sáez, D. A microgrid energy management system based on the rolling horizon strategy. IEEE Trans. Smart Grid 2013, 4, 996–1006. [Google Scholar] [CrossRef]
- Meng, L.; Sanseverino, E.R.; Luna, A.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Microgrid supervisory controllers and energy management systems: A literature review. Renew. Sustain. Energy Rev. 2016, 60, 1263–1273. [Google Scholar] [CrossRef]
- Feng, X.; Butler-Purry, K.L.; Zourntos, T. A multi-agent system framework for real-time electric load management in MVAC all-electric ship power systems. IEEE Trans. Power Syst. 2015, 30, 1327–1336. [Google Scholar] [CrossRef]
- Feng, X.; Butler-Purry, K.L.; Zourntos, T. Multi-agent system-based real-time load management for all-electric ship power systems in DC zone level. IEEE Trans. Power Syst. 2012, 27, 1719–1728. [Google Scholar] [CrossRef]
- Di Silvestre, M.L.; Graells, M.; Guerrero, J.M.; Luna, A.C.; Mineo, L.; Nguyen, N.; Sanseverino, E.R.; Vasquez, J.C. Energy Management Systems and tertiary regulation in hierarchical control architectures for islanded micro-grids. In Proceedings of the 2015 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015. [Google Scholar]
- Hebner, R.E.; Uriarte, F.M.; Kwasinski, A.; Gattozzi, A.L.; Estes, H.B.; Anwar, A.; Cairoli, P.; Dougal, R.A.; Feng, X.; Chou, H.-M.; et al. Technical cross-fertilization between terrestrial microgrids and ship power systems. J. Mod. Power Syst. Clean Energy 2015, 4, 161–179. [Google Scholar] [CrossRef]
- Debs, A.S. Modern Power Systems Control and Operation; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Kanellos, F.D.; Tsekouras, G.J.; Hatziargyriou, N.D. Optimal demand-side management and power generation scheduling in an all-electric ship. IEEE Trans. Sustain. Energy 2014, 5, 1166–1175. [Google Scholar] [CrossRef]
- Kanellos, F. Optimal power management with GHG emissions limitation in all-electric ship power systems comprising energy storage systems. IEEE Trans. Power Syst. 2014, 29, 330–339. [Google Scholar] [CrossRef]
- Kanellos, F.D.; Prousalidis, J.M.; Tsekouras, G.J. Control system for fuel consumption minimization–gas emission limitation of full electric propulsion ship power systems. Proc. Inst. Mech. Eng. Part M 2014, 228, 17–28. [Google Scholar] [CrossRef]
- Nimma, K.; Al-Falahi, M.; Nguyen, H.D.; Jayasinghe, S.D.G.; Mahmoud, T.; Negnevitsky, M. Grey Wolf Optimization-Based Optimum Energy-Management and Battery-Sizing Method for Grid-Connected Microgrids. Energies 2018, 11, 847. [Google Scholar] [CrossRef]
- Hou, J.; Sun, J.; Hofmann, H. Adaptive model predictive control with propulsion load estimation and prediction for all-electric ship energy management. Energy 2018, 150, 877–889. [Google Scholar] [CrossRef]
- Hou, J.; Sun, J.; Hofmann, H.F. Mitigating Power Fluctuations in Electric Ship Propulsion With Hybrid Energy Storage System: Design and Analysis. IEEE J. Ocean. Eng. 2018, 43, 93–107. [Google Scholar] [CrossRef]
- Kanellos, F.D.; Anvari-Moghaddam, A.; Guerrero, J.M. A cost-effective and emission-aware power management system for ships with integrated full electric propulsion. Electr. Power Syst. Res. 2017, 150, 63–75. [Google Scholar] [CrossRef]
- Jiang, Y.; Jiang, J.; Zhang, Y. A novel fuzzy multiobjective model using adaptive genetic algorithm based on cloud theory for service restoration of shipboard power systems. IEEE Trans. Power Syst. 2012, 27, 612–620. [Google Scholar] [CrossRef]
- Shariatzadeh, F.; Vellaithurai, C.B.; Biswas, S.S.; Zamora, R.; Srivastava, A.K. Real-time implementation of intelligent reconfiguration algorithm for microgrid. IEEE Trans. Sustain. Energy 2014, 5, 598–607. [Google Scholar] [CrossRef]
- Reichel, M.; Minchev, A.; Larsen, N.L. Trim Optimisation—Theory and Practice. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2014, 8, 387–392. [Google Scholar] [CrossRef]
- Kankanala, P.; Srivastava, S.C.; Srivastava, A.K.; Schulz, N.N. Optimal control of voltage and power in a multi-zonal MVDC shipboard power system. IEEE Trans. Power Syst. 2012, 27, 642–650. [Google Scholar] [CrossRef]
- Vu, T.V.; Paran, S.; Mezyani, T.E.; Edrington, C.S. Real-time Distributed Power Optimization in the DC Microgrids of Shipboard Power Systems. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015. [Google Scholar]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.M. Multi-agent system for energy resource scheduling of integrated microgrids in a distributed system. Electr. Power Syst. Res. 2011, 81, 138–148. [Google Scholar] [CrossRef]
- Dou, C.; Yue, D.; Guerrero, J.M.; Xie, X.; Hu, S. Multiagent System-Based Distributed Coordinated Control for Radial DC Microgrid Considering Transmission Time Delays. IEEE Trans. Smart Grid 2017, 8, 2370–2381. [Google Scholar] [CrossRef]
- Zhao, B.; Xue, M.; Zhang, X.; Wang, C.; Zhao, J. An MAS based energy management system for a stand-alone microgrid at high altitude. Appl. Energy 2015, 143, 251–261. [Google Scholar] [CrossRef]
- Feng, X.; Butler-Purry, K.L.; Zourntos, T. Real-time electric load management for DC zonal all-electric ship power systems. Electr. Power Syst. Res. 2018, 154, 503–514. [Google Scholar] [CrossRef]
- Zahedi, B.; Norum, L.E.; Ludvigsen, K.B. Optimized efficiency of all-electric ships by dc hybrid power systems. J. Power Sources 2014, 255, 341–354. [Google Scholar] [CrossRef]
- Bose, S.; Pal, S.; Natarajan, B.; Scoglio, C.M.; Das, S.; Schulz, N.N. Analysis of Optimal Reconfiguration of Shipboard Power Systems. IEEE Trans. Power Syst. 2012, 27, 189–197. [Google Scholar] [CrossRef]
- Nimma, K.; Faraj, S. Modeling Intelligent Control Switch IEC 61850 Based Substation Automation Communication. Appl. Syst. Innov. 2018, 1, 7. [Google Scholar] [CrossRef]
- Kounev, V.; Tipper, D.; Yavuz, A.A.; Grainger, B.M.; Reed, G.F. A Secure Communication Architecture for Distributed Microgrid Control. IEEE Trans. Smart Grid 2015, 6, 2484–2492. [Google Scholar] [CrossRef]
- Hou, C.; Jiang, H.; Yang, Y.; Rui, W.; Hu, L. Research on Implementing Real Time Ethernet for Ship Power System. In Proceedings of the 2010 2nd International Workshop on Intelligent Systems and Applications (ISA), Wuhan, China, 22–23 May 2010; pp. 1–4. [Google Scholar]
- Liu, S.; Wang, X.; Liu, P.X. Impact of communication delays on secondary frequency control in an islanded microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2021–2031. [Google Scholar] [CrossRef]
- EMMA Addvisory Suite. The Complete, East-to-Use Energy Management Solution—Including Monitoring and Optmization; ABB: Zürich, Switzerland, 2012; pp. 1–4. [Google Scholar]
- Altosole, M.; Benvenuto, G.; Campora, U.; Laviola, M.; Trucco, A. Waste Heat Recovery from Marine Gas Turbines and Diesel Engines. Energies 2017, 10, 718. [Google Scholar] [CrossRef]
- Tichavska, M.; Tovar, B.; Gritsenko, D.; Johansson, L.; Jalkanen, J.P. Air emissions from ships in port: Does regulation make a difference? Transp. Policy 2017. [Google Scholar] [CrossRef]
- Koller, M.; Borsche, T.; Ulbig, A.; Andersson, G. Review of grid applications with the Zurich 1MW battery energy storage system. Electr. Power Syst. Res. 2015, 120, 128–135. [Google Scholar] [CrossRef]
- Singh, M.; Lopes, L.A.; Ninad, N.A. Grid forming Battery Energy Storage System (BESS) for a highly unbalanced hybrid mini-grid. Electr. Power Syst. Res. 2015, 127, 126–133. [Google Scholar] [CrossRef]
- Misyris, G.S.; Marinopoulos, A.; Doukas, D.I.; Tengnér, T.; Labridis, D.P. On battery state estimation algorithms for electric ship applications. Electr. Power Syst. Res. 2017, 151, 115–124. [Google Scholar] [CrossRef]
- Lashway, C.R.; Elsayed, A.T.; Mohammed, O.A. Hybrid energy storage management in ship power systems with multiple pulsed loads. Electr. Power Syst. Res. 2016, 141, 50–62. [Google Scholar] [CrossRef]
- IEEE Standard 1709-2010. IEEE Recommended Practice for 1 kV to 35 kV Medium-Voltage DC Power Systems on Ships; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Objective | Constrains * | Operating Condition | Software/Experimental | Ref. | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| VL | F | SC | PCC | PB | GL | OT | GHG | SS | TD | RR | BP | GSS | ESS | LL | SI | CC | PG | BC | |||||
| Hybrid heuristics and MPC based EMS | Minimizing the cost to manage the energy of storage system | √ | √ | √ | √ | Ramp rate conditions | Software and experimental | [11] | |||||||||||||||
| Adaptive MPC | Maximize system reliability and efficiency | √ | √ | √ | √ | √ | Normal | Software | [72] | ||||||||||||||
| Real-time multi-objective MPC | Minimize the power tracking error and storage losses | √ | √ | √ | Normal | Software | [73] | ||||||||||||||||
| Fuzzy-based PSO (FPSO) | Minimize the operating cost and GHG | √ | √ | √ | √ | √ | Normal | Software | [74] | ||||||||||||||
| Multi- objective non-dominated Sorting Genetic Algorithm II | Minimize the total power adjustments, individual active power set-point adjustments and individual reactive power set-point adjustments | √ | √ | √ | √ | Normal/alert | Software | [20] | |||||||||||||||
| Multi-agent | Minimize the mismatch between generation and load and to serve as many higher priority loads as possible in operational real time | √ | √ | Normal/Emergency | Software | [63] | |||||||||||||||||
| Maximize capacity of the energized loads | √ | √ | Normal/Emergency | Software | [64] | ||||||||||||||||||
| Real-time PSO | Minimize the system’s cost and | √ | √ | Normal and pulse load | Software | [79] | |||||||||||||||||
| Dynamic programming | Minimize the total variable cost | √ | √ | √ | √ | √ | √ | √ | √ | Cruise ferry | Software | [68] | |||||||||||
| Dynamic programming and PSO | Minimum operation cost and GHG emissions limitation | √ | √ | √ | √ | √ | √ | √ | √ | √ | Cruise ferry | Software | [69] | ||||||||||
| Recursive searching algorithm | Minimize fuel cost and GHG emissions limitation | √ | √ | √ | √ | √ | √ | Normal | Software | [70] | |||||||||||||
| Numerical algorithm | Minimize fuel consumption | √ | √ | Seven operating conditions | Software and experimental | [84] | |||||||||||||||||
| Fuzzy Multi-objective using adaptive Generic Algorithm | Maximization of the Restored Loads Considering the Load Priorities and Minimization of the Number of Switch Operations Considering the Switch Priorities | √ | √ | √ | Restoration | Software | [75] | ||||||||||||||||
| GA | Maximizing the served load with respect to load priorities after fault occurrence | √ | √ | Reconfiguration | Software | [76] | |||||||||||||||||
| Real-time heterogeneous MAS | Maximize the energized loads in the dc zonal system | √ | √ | √ | Normal and pulse load | Software | [83] | ||||||||||||||||
| Reconfiguration algorithms | Maximizing power delivery and minimizing the number of switching actions | √ | √ | √ | √ | Reconfiguration | Software | [85] | |||||||||||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Falahi, M.D.A.; Tarasiuk, T.; Jayasinghe, S.G.; Jin, Z.; Enshaei, H.; Guerrero, J.M. AC Ship Microgrids: Control and Power Management Optimization. Energies 2018, 11, 1458. https://doi.org/10.3390/en11061458
Al-Falahi MDA, Tarasiuk T, Jayasinghe SG, Jin Z, Enshaei H, Guerrero JM. AC Ship Microgrids: Control and Power Management Optimization. Energies. 2018; 11(6):1458. https://doi.org/10.3390/en11061458
Chicago/Turabian StyleAl-Falahi, Monaaf D. A., Tomasz Tarasiuk, Shantha Gamini Jayasinghe, Zheming Jin, Hossein Enshaei, and Josep M. Guerrero. 2018. "AC Ship Microgrids: Control and Power Management Optimization" Energies 11, no. 6: 1458. https://doi.org/10.3390/en11061458
APA StyleAl-Falahi, M. D. A., Tarasiuk, T., Jayasinghe, S. G., Jin, Z., Enshaei, H., & Guerrero, J. M. (2018). AC Ship Microgrids: Control and Power Management Optimization. Energies, 11(6), 1458. https://doi.org/10.3390/en11061458