Optimal Design and Real Time Implementation of Autonomous Microgrid Including Active Load



Abstract
:1. Introduction
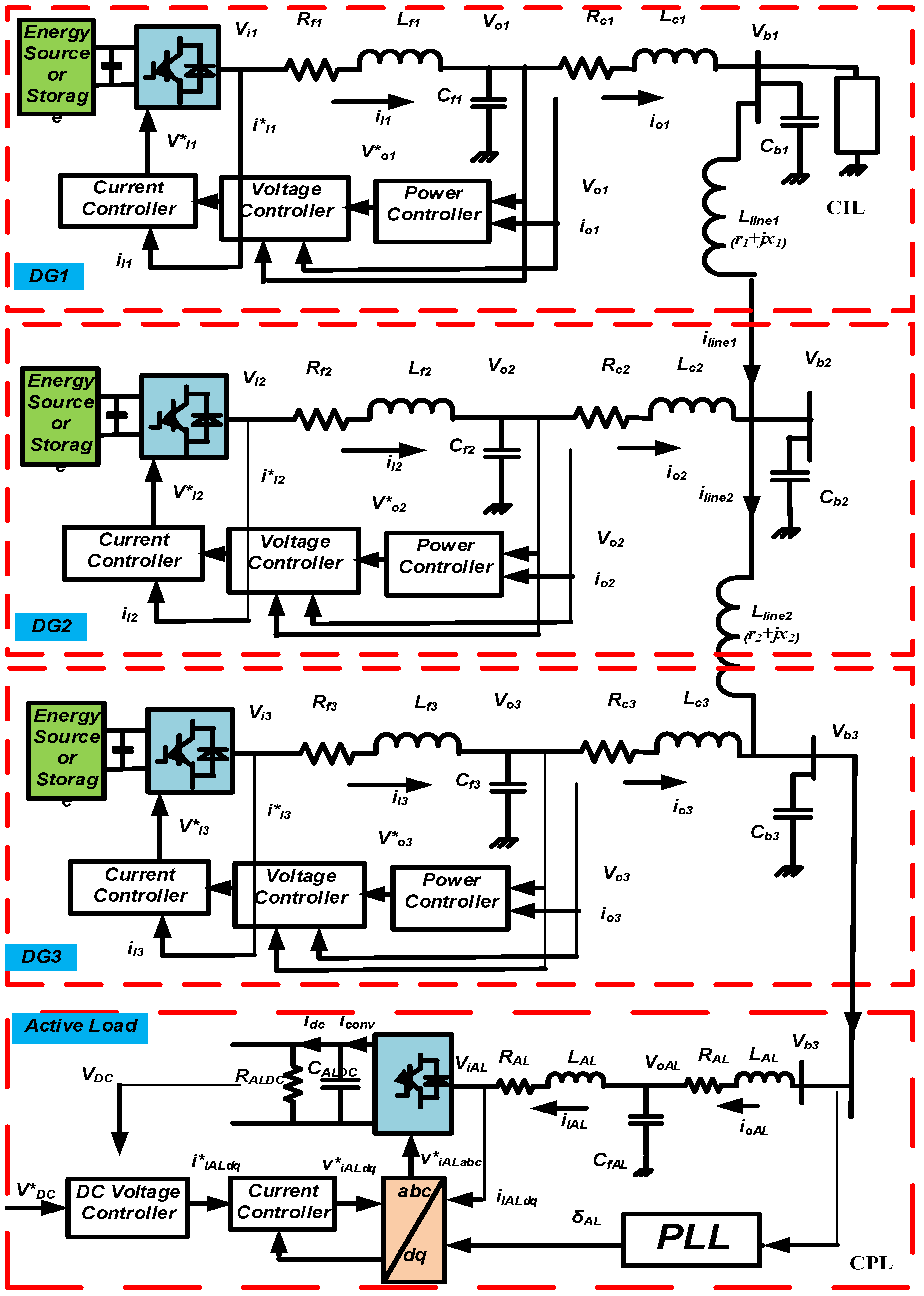
2. System Description
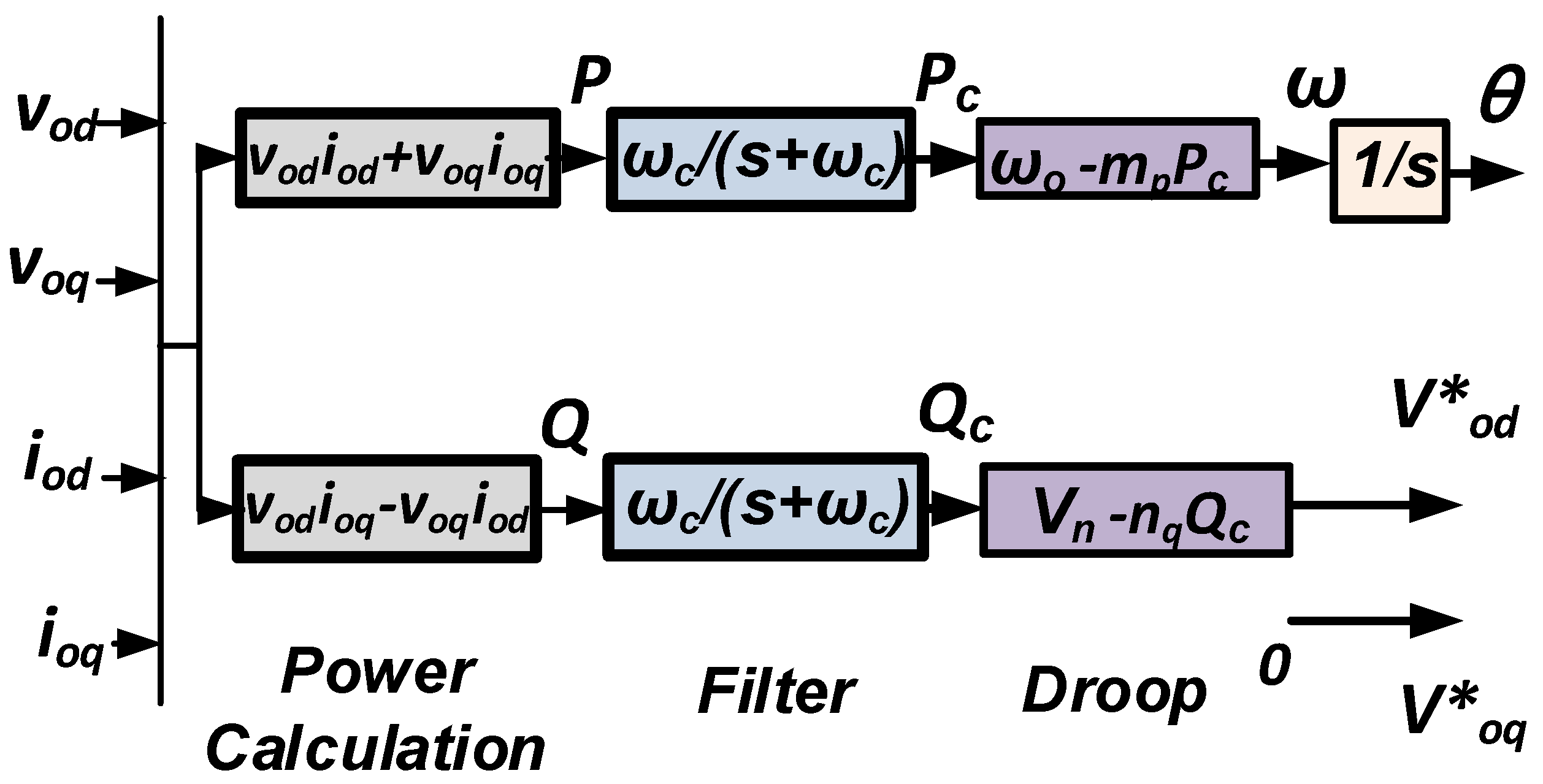
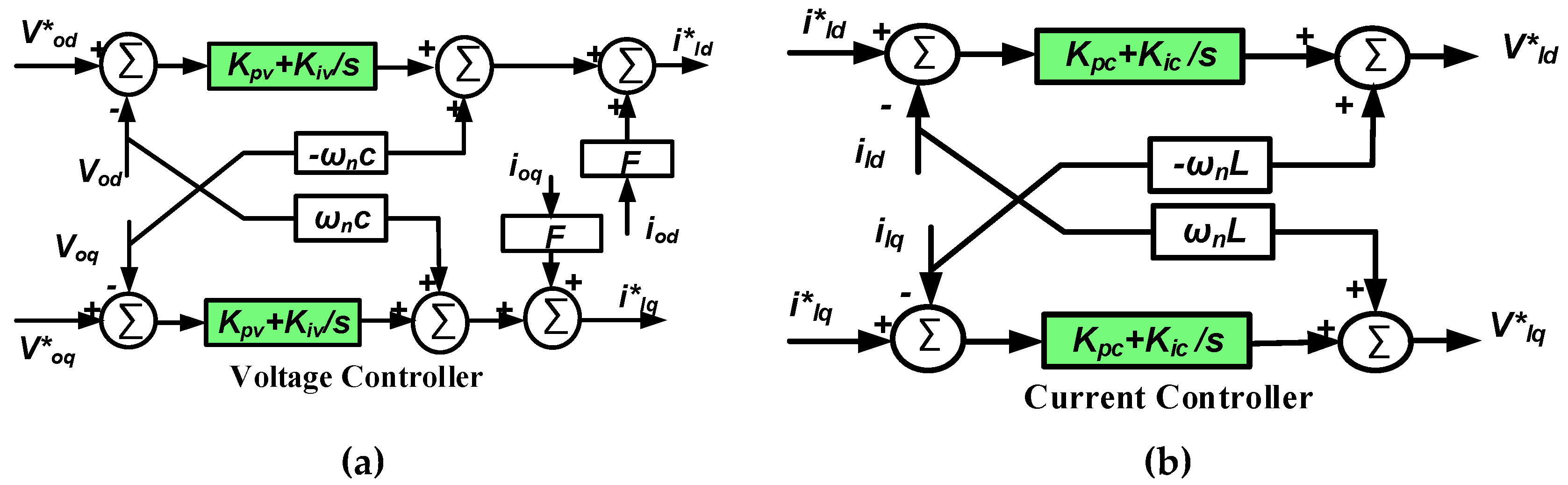
2.1. Autonomous Microgrid Model
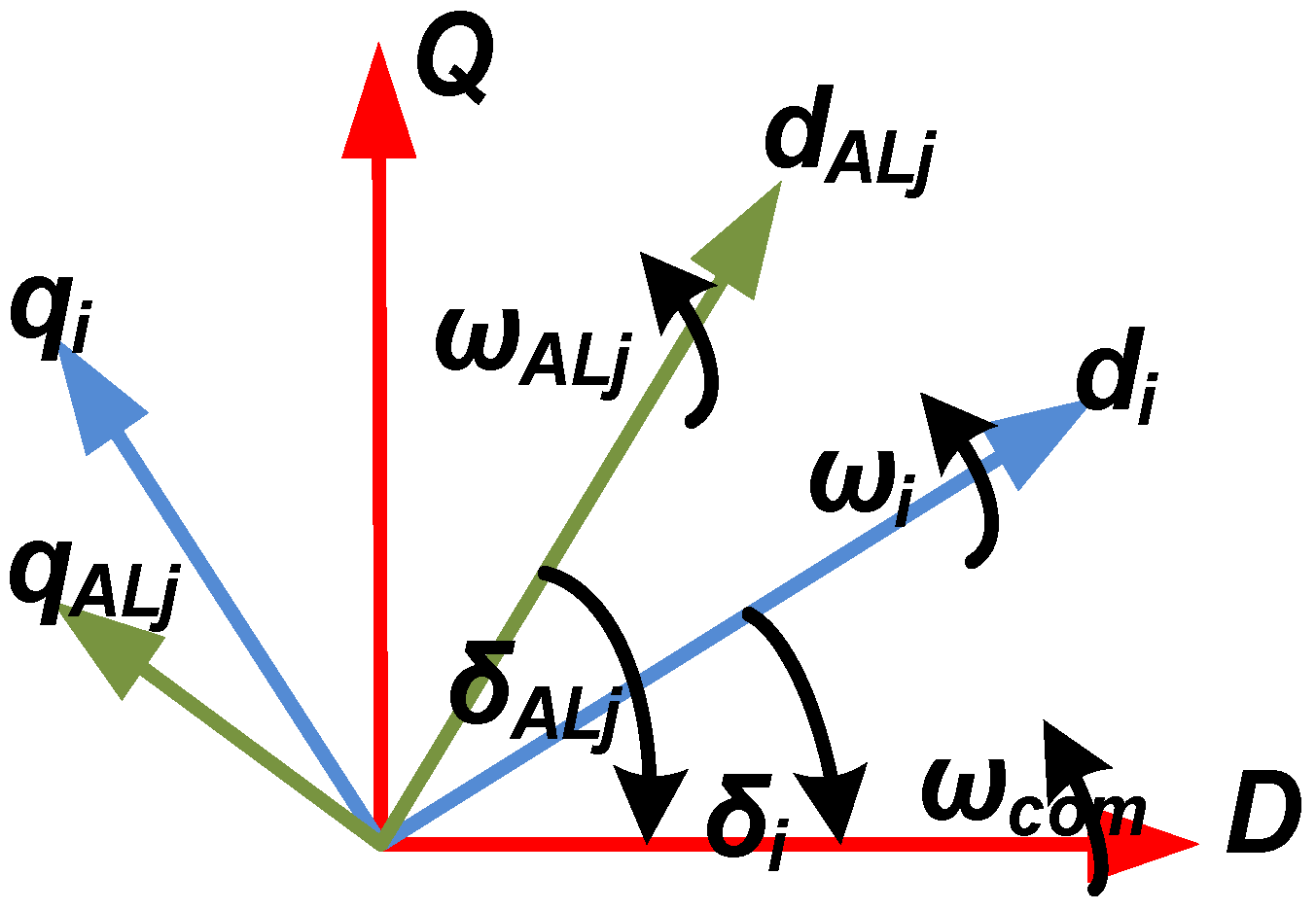
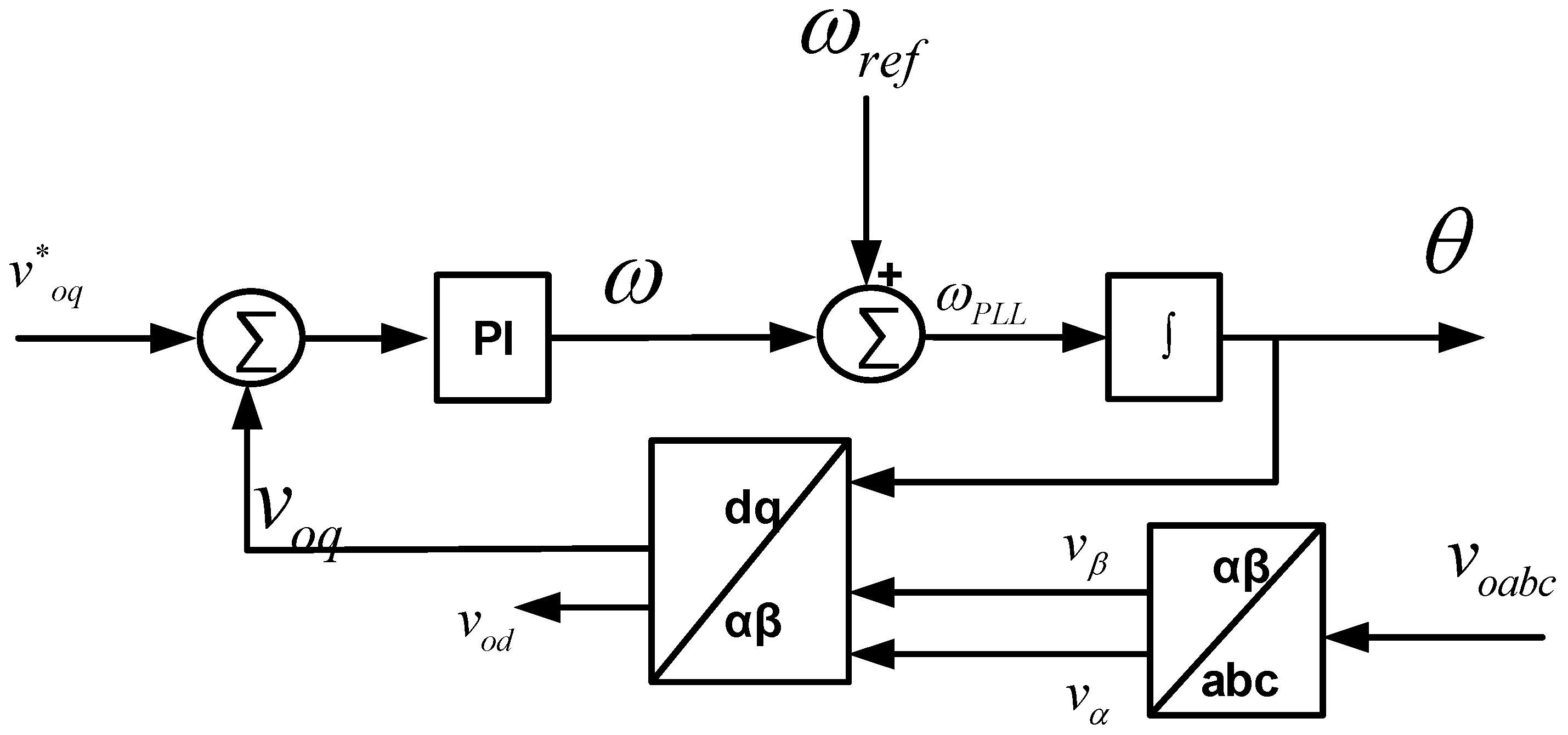
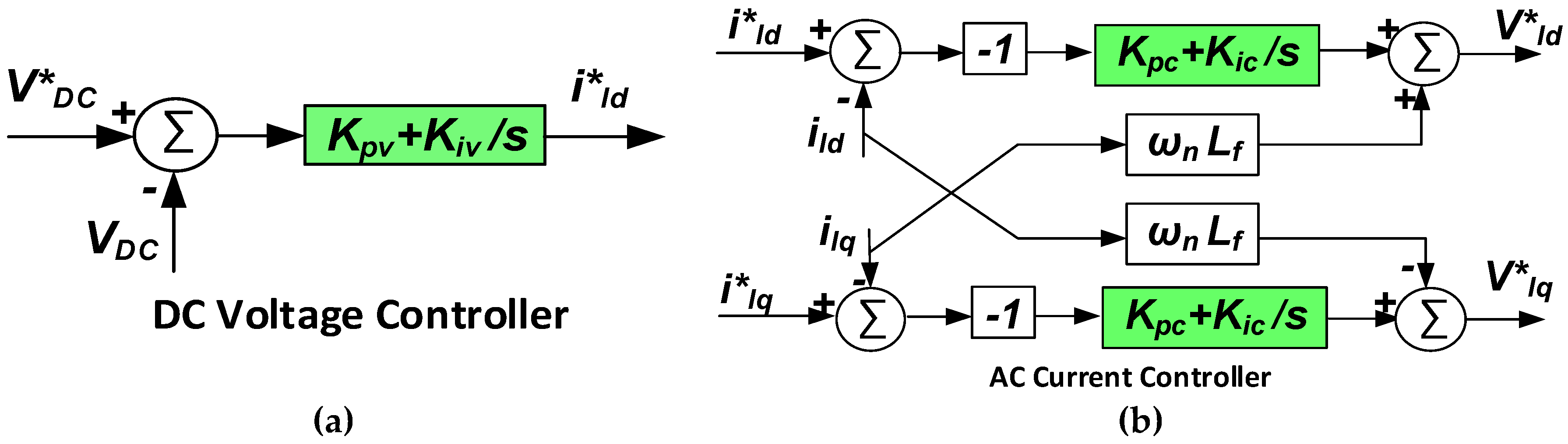
2.2. Active Load Model
3. Problem Formulation
3.1. Objective Function and Problem Constraints
3.2. Particle Swarm Optimization
3.3. PSO Implementation
- Population size = 20;
- Decrement constant (α) = 0.98;
- Inertia weight factor = 1;
- Acceleration constants: c1 = c2 = 2;
- Generation or iteration = 100.
4. Results and Discussion
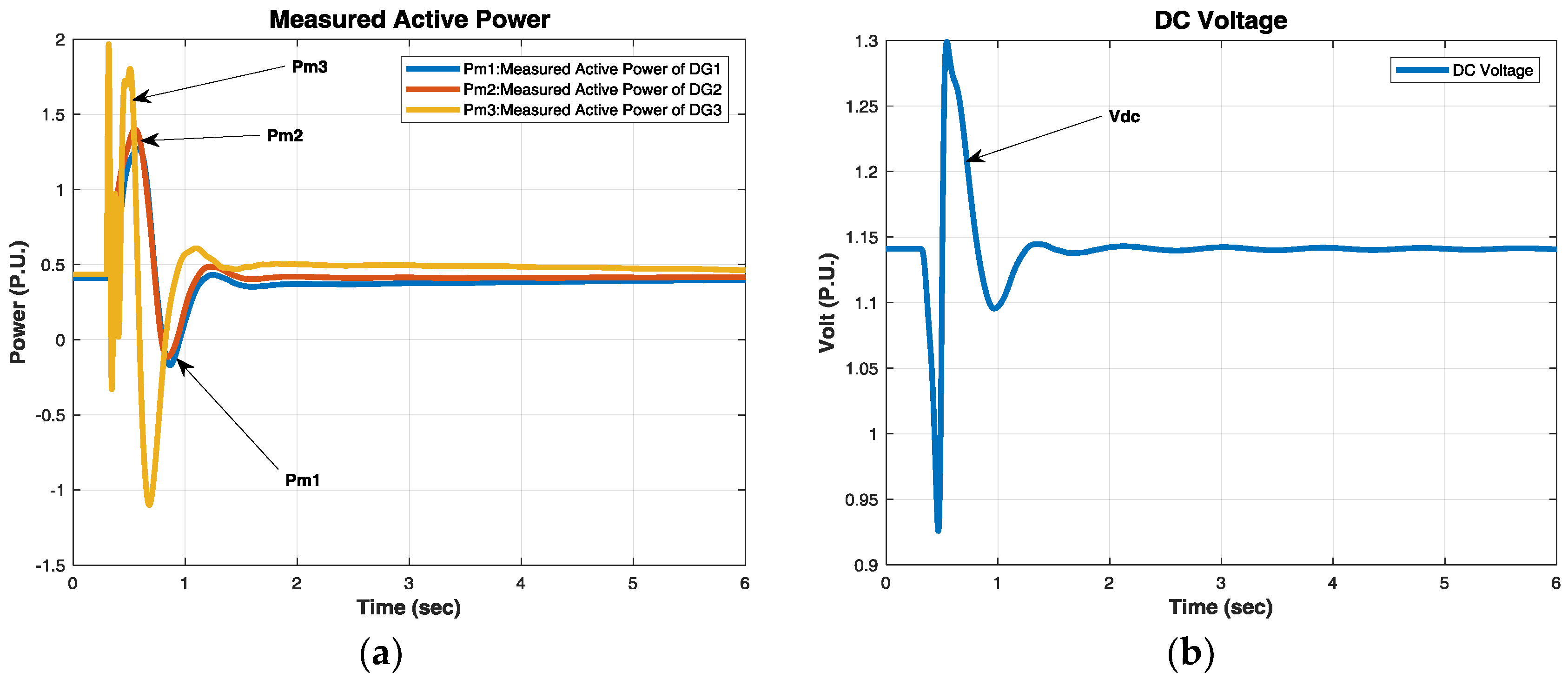
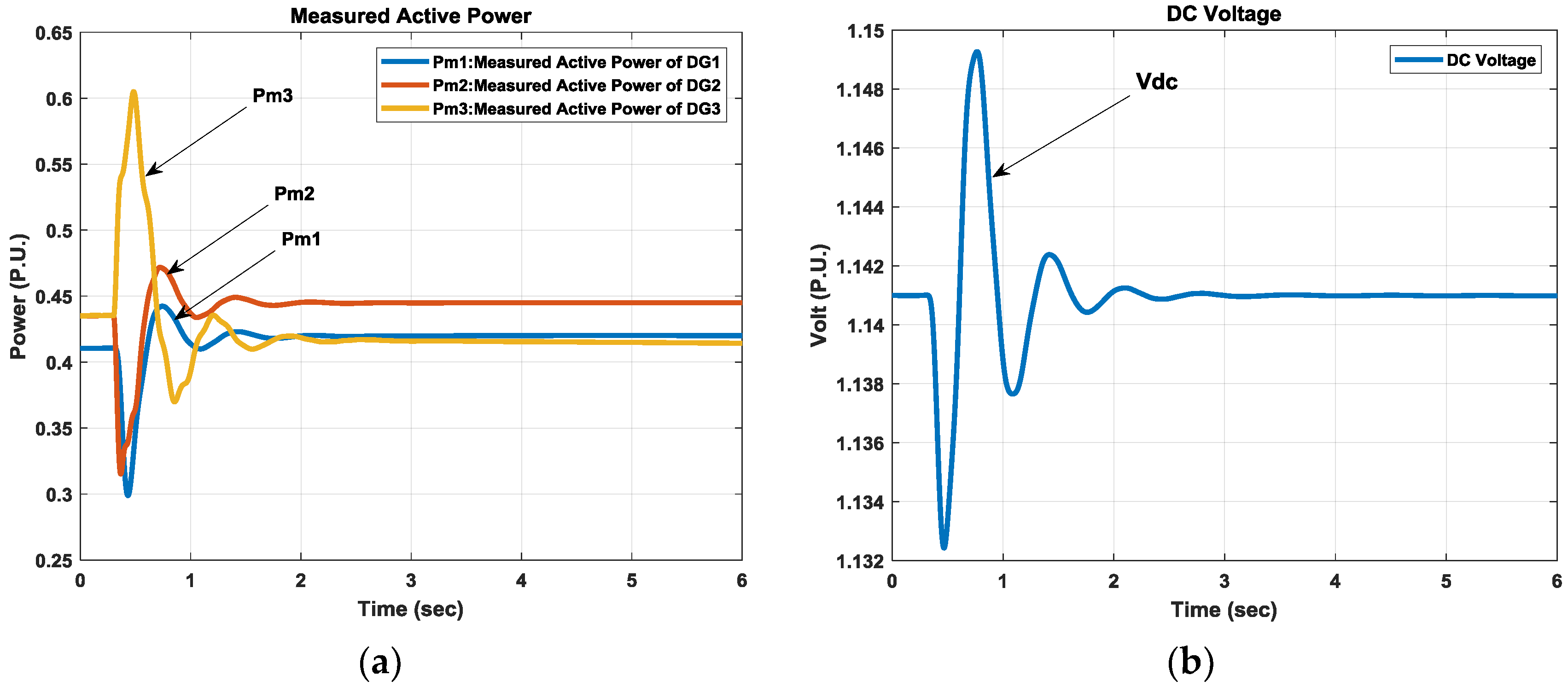
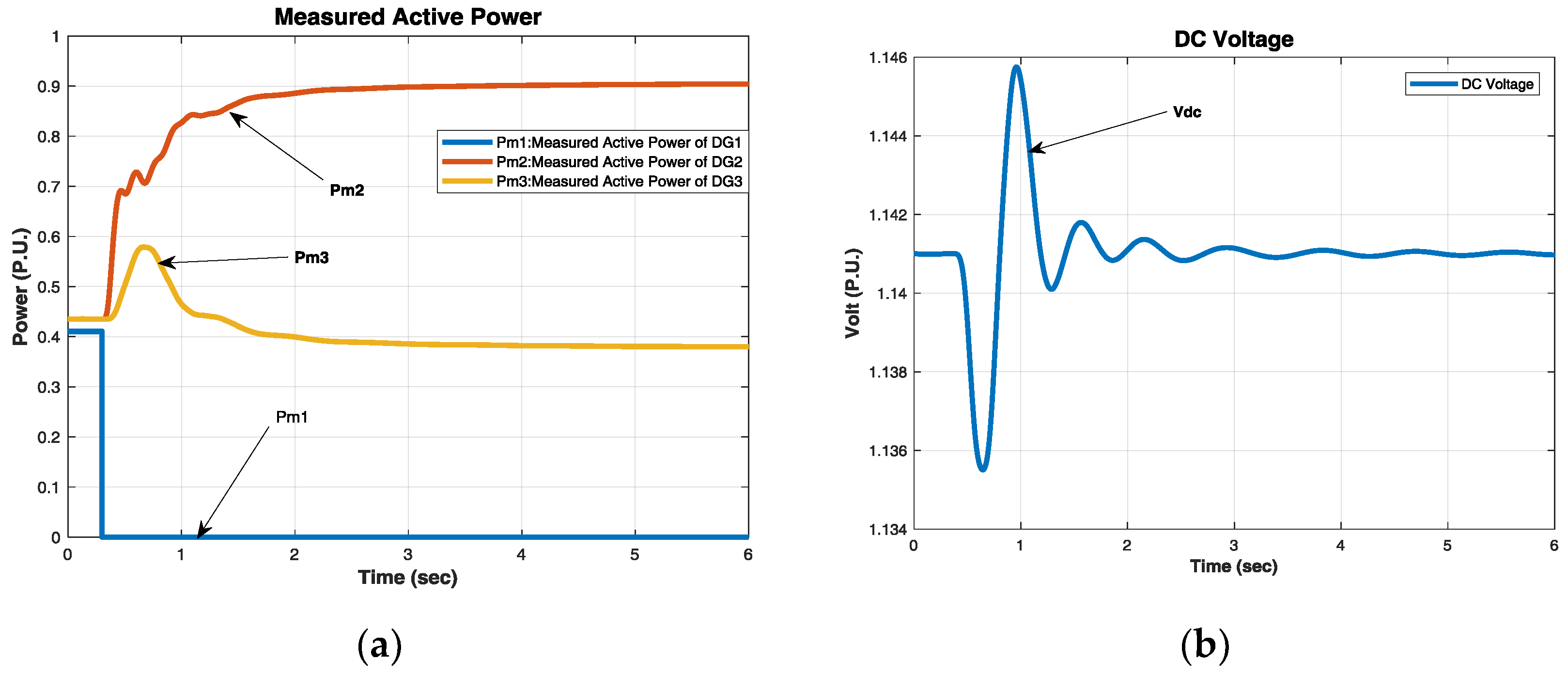
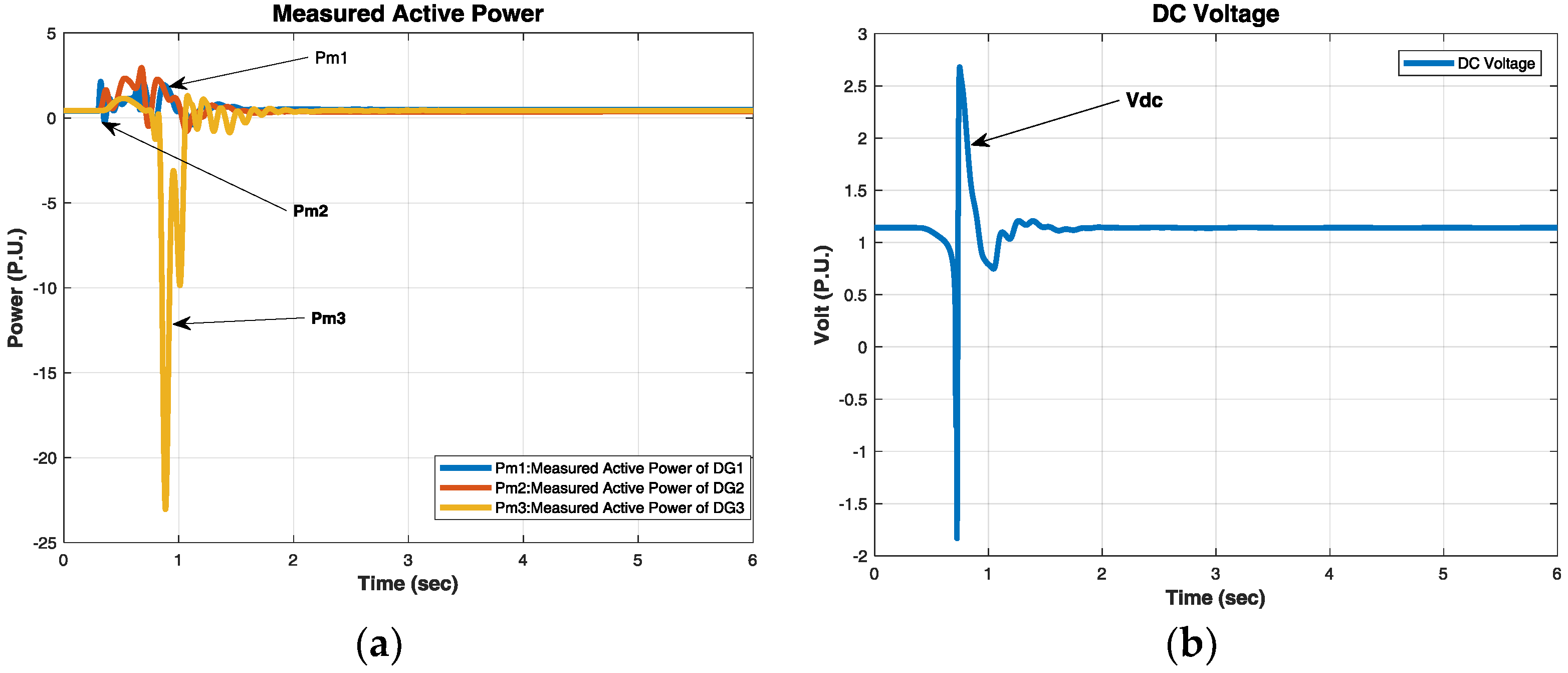
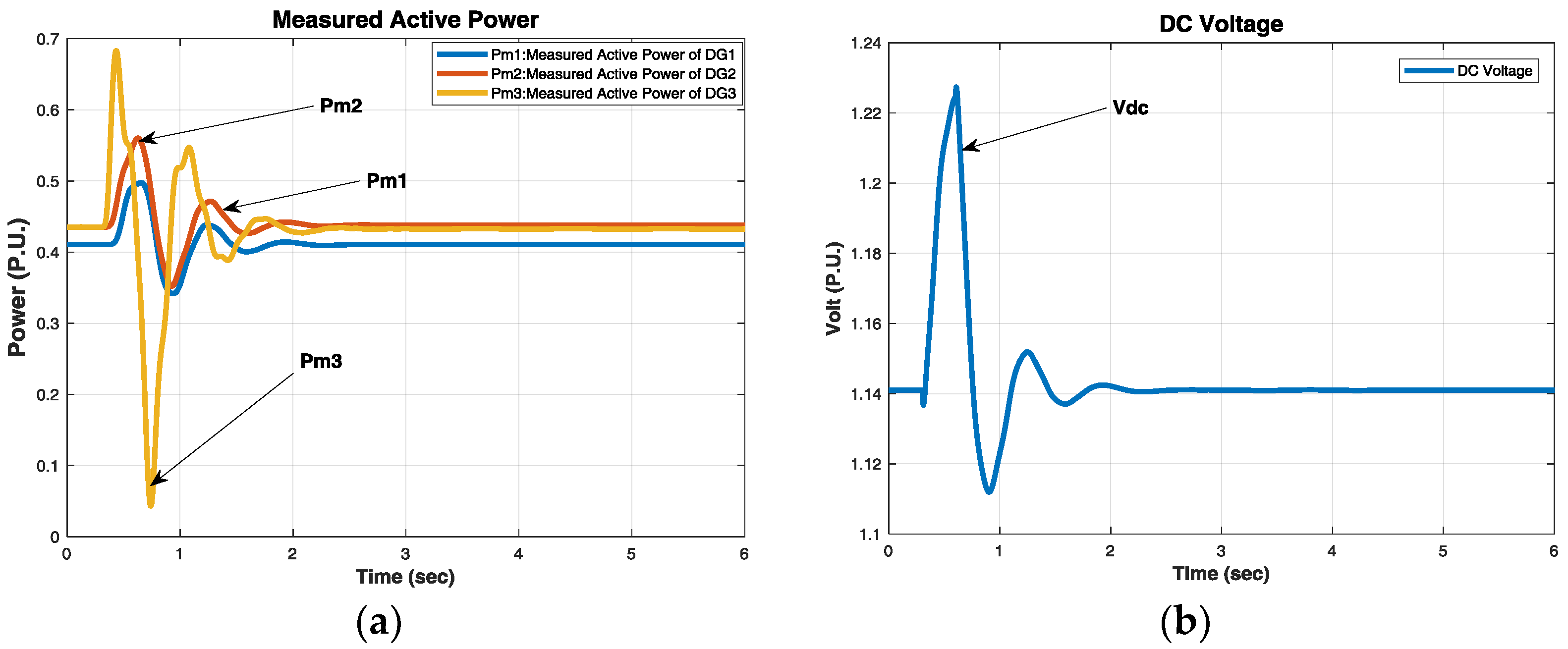
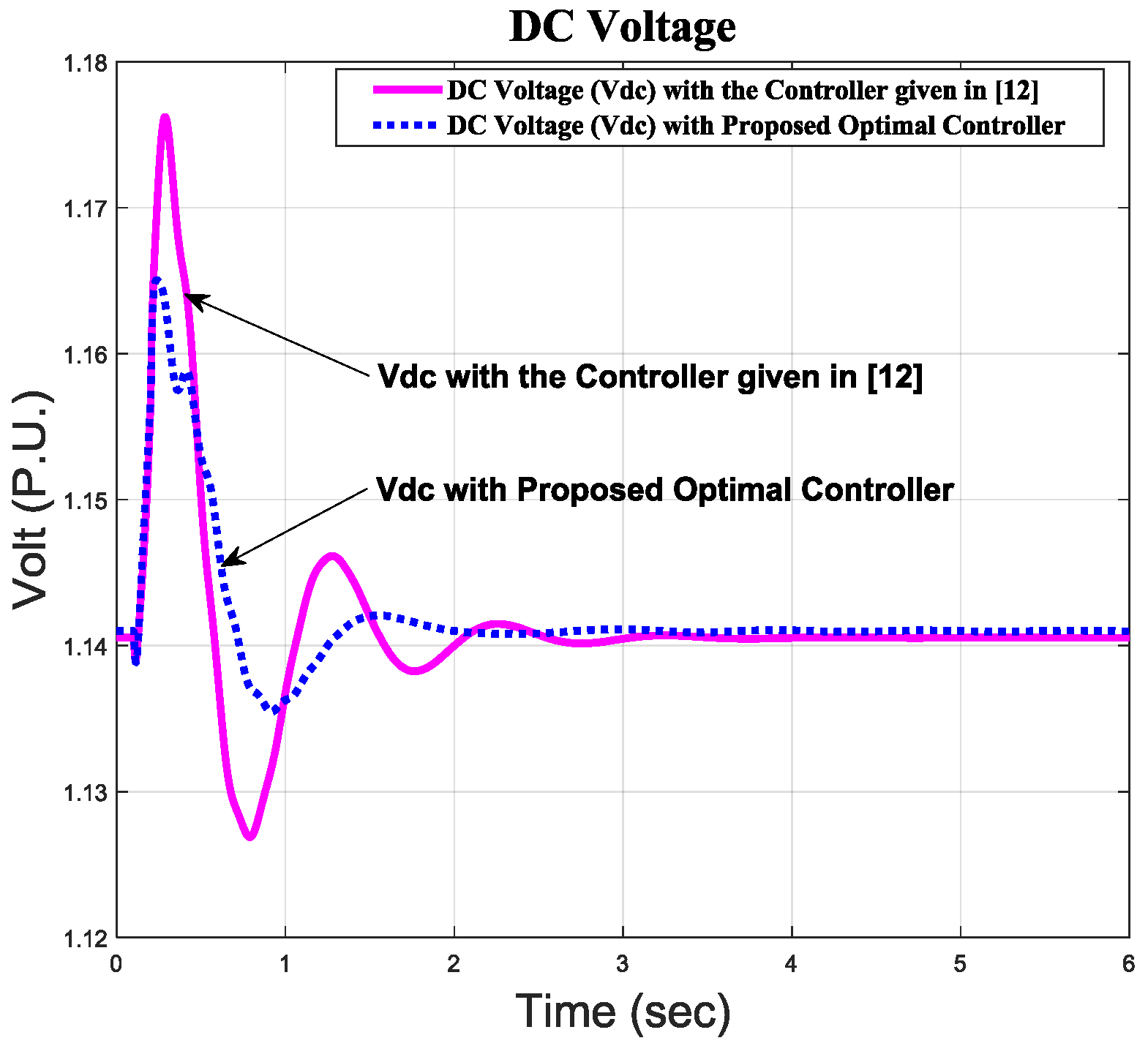
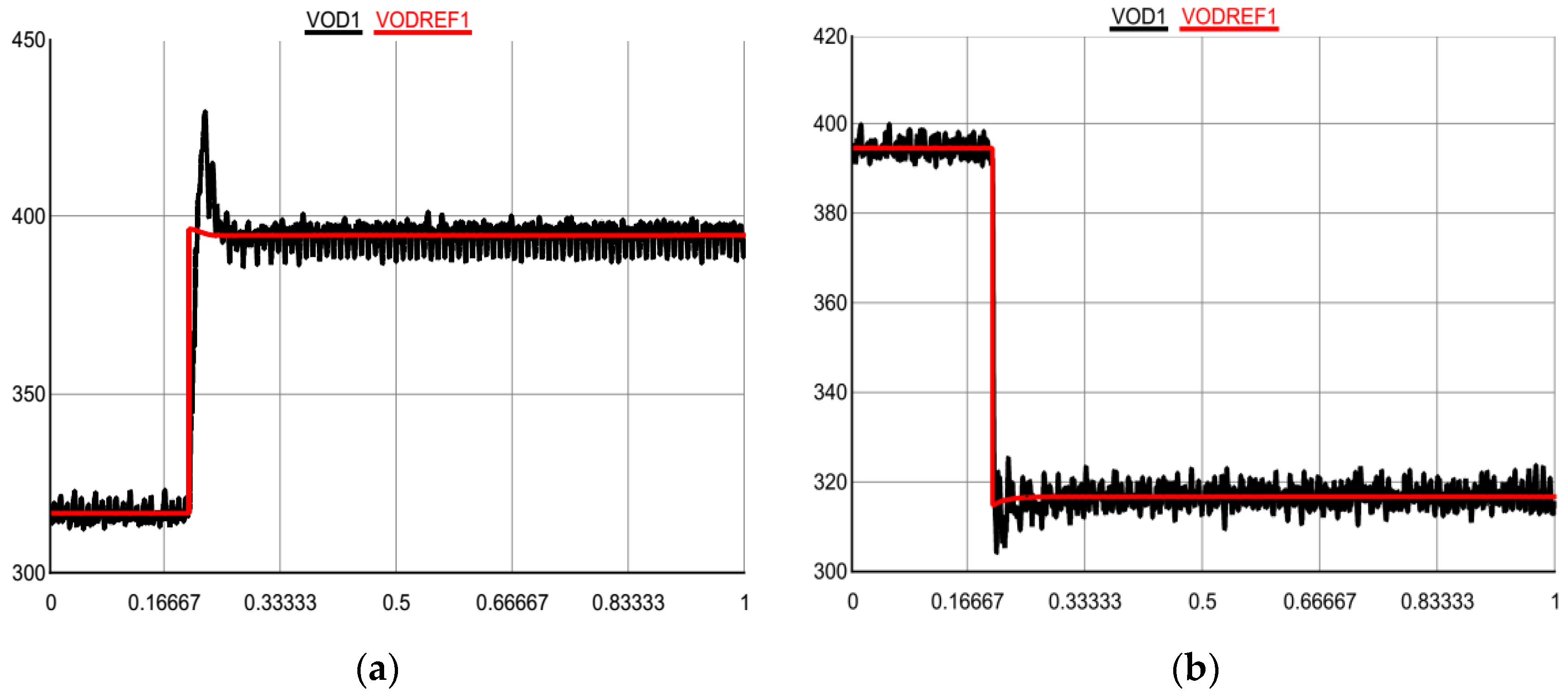
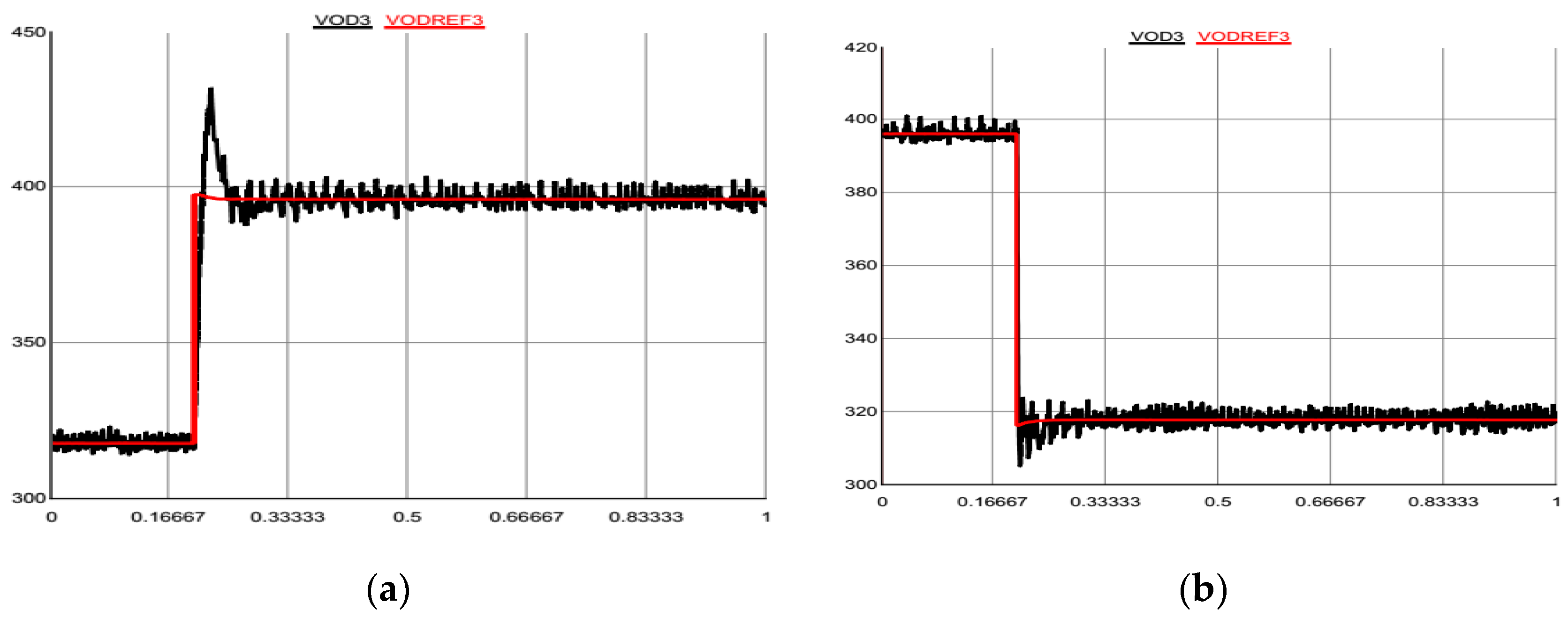
4.1. Time Domain Simulation
4.2. Experimental Implementation and Results
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Colmenar-Santos, A.; Reino-Rio, C.; Borge-Diez, D.; Collado-Fernández, E. Distributed generation: A review of factors that can contribute most to achieve a scenario of DG units embedded in the new distribution networks. Renew. Sustain. Energy Rev. 2016, 59, 1130–1148. [Google Scholar] [CrossRef]
- Hatziargyriou, N. Microgrids: Architectures and Control; John Wiley & Sons: Chichester, UK, 2013. [Google Scholar]
- Hassan, M.; Abido, M. Optimal design of microgrids in autonomous and grid-connected modes using particle swarm optimization. IEEE Trans. Power Electron. 2011, 26, 755–769. [Google Scholar] [CrossRef]
- Raju, E.; Jain, T. Robust optimal centralized controller to mitigate the small signal instability in an islanded inverter based microgrid with active and passive loads. Electr. Power Energy Syst. 2017, 90, 225–236. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of power sharing control strategies for islanding operation of ac microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Chandorkar, M.; Divan, D.; Adapa, R. Control of parallel-connected inverters in standalone ac supply systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef]
- Olivares, D.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Tsikalakis, A.; Hatziargyriou, N. Centralized control for optimizing microgrids operation. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011. [Google Scholar]
- Tan, K.; Peng, X.; So, P.; Chu, Y.; Chen, M. Centralized control for parallel operation of distributed generation inverters in microgrids. IEEE Trans. Smart Grid 2012, 3, 1977–1987. [Google Scholar] [CrossRef] [Green Version]
- Liang, H.; Choi, B.J.; Zhuang, W.; Shen, X. Stability enhancement of decentralized inverter control through wireless communications in microgrids. IEEE Trans. Smart Grid 2013, 4, 321–331. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Chen, Z.; Blaabjerg, F. Distributed optimal control of reactive power and voltage in islanded microgrids. IEEE Trans. Ind. Appl. 2017, 53, 340–349. [Google Scholar] [CrossRef]
- Bottrell, N.; Prodanovic, M.; Green, T. Dynamic stability of a microgrid with an active load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef]
- He, J.; Li, Y. An enhanced microgrid load demand sharing strategy. IEEE Trans. Power Electron. 2017, 27, 3984–3995. [Google Scholar] [CrossRef]
- Guerrero, J.; Loh, P.; Chandorkar, M. Advanced control architectures for intelligent microgrids—Part I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- He, J.; Li, Y.; Guerrero, J. An islanding microgrid power sharing approach using enhanced virtual impedance control scheme. IEEE Trans. Power Electron. 2013, 28, 5272–5282. [Google Scholar] [CrossRef]
- Zhong, Q. Robust droop controller for accurate proportional load sharing among inverters operated in parallel. IEEE Trans. Ind. Electron. 2013, 60, 1281–1290. [Google Scholar] [CrossRef]
- Lee, C.; Chu, C.; Cheng, P. A new droop control method for the autonomous operation of distributed energy resource interface converters. IEEE Trans. Power Electron. 2013, 28, 1980–1993. [Google Scholar] [CrossRef]
- Perreault, D.; Selders, R., Jr.; Kassakian, J. Frequency based current-sharing techniques for paralleled power converters. IEEE Trans. Power Electron. 1988, 13, 626–634. [Google Scholar] [CrossRef]
- Tuladhar, A.; Jin, H.; Unger, T. Control of parallel inverters in distributed AC power systems with consideration of line impedance effect. IEEE Trans. Ind. Appl. 2000, 36, 131–138. [Google Scholar] [CrossRef]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.; Guerrero, J. Review of active and reactive power sharing strategies in hierarchical controlled microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef]
- Emadi, A.; Khaligh, A.; Rivetta, C.; Williamson, G. Constant power loads and negative impedance instability in automotive systems: Definition, modeling, stability, and control of power electronic converters and motor drives. IEEE Trans. Veh. Technol. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Sanchez, S.; Ortega, R.; Grino, R.; Bergna, G.; Molinas, M. Conditions for existence of equilibria of systems with constant power loads. IEEE Trans. Circuits Syst. I Regul. Pap. 2014, 61, 2204–2211. [Google Scholar] [CrossRef]
- Hassan, M. Dynamic Stability of an Autonomous Microgrid Considering Active Load Impact with New Dedicated Synchronization Scheme. IEEE Trans. Power Syst. 2018, 1–12. [Google Scholar] [CrossRef]
- Dong, D.; Wen, B.; Boroyevich, D.; Mattavelli, P.; Xue, Y. Analysis of phase-locked loop low-frequency stability in three-phase grid-connected power converters considering impedance interactions. IEEE Trans. Ind. Electron. 2015, 62, 310–321. [Google Scholar] [CrossRef]
- Svensson, J. Synchronization methods for grid-connected voltage source converters. IEE Proc. Gener. Transm. Distrib. 2001, 148, 229–235. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J. Stability analysis and parameters optimization of islanded microgrid with both ideal and dynamic constant power loads. IEEE Trans. Ind. Electron. 2018, 65, 3263–3274. [Google Scholar] [CrossRef]
- Mahmoudi, A.; Hosseinian, S.; Kosari, M.; Zarabadipour, H. A new linear model for active loads in islanded inverter-based microgrid. Int. J. Electr. Power Energy Syst. 2016, 81, 104–113. [Google Scholar] [CrossRef]
- Magne, P.; Nahid-Mobarakeh, B.; Pierfederci, S. Dynamic consideration of dc microgrids with constant power loads and active damping system; a design method for fault-tolerant stabilizing system. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 562–570. [Google Scholar] [CrossRef]
- Marx, D.; Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S.; Davat, B. Large signal stability analysis tools in dc power systems with constant power loads and variable power loads—A review. IEEE Trans. Power Electron. 2012, 27, 1773–1787. [Google Scholar] [CrossRef]
- Du, W.; Zhang, J.; Zhang, Y.; Qian, Z. Stability criterion for cascaded system with constant power load. IEEE Trans. Power Electron. 2013, 28, 1843–1851. [Google Scholar] [CrossRef]
- Karimipour, D.; Salmasi, F. Stability Analysis of AC Microgrids with Constant Power Loads Based on Popov’s Absolute Stability Criterion. IEEE Trans. Circuits Syst. II 2015, 62, 696–700. [Google Scholar] [CrossRef]
- Guo, X.; Lu, Z.; Wang, B.; Sun, X.; Wang, L.; Guerrero, J. Dynamic phasors-based modeling and stability analysis of droop-controlled inverters for microgrid applications. IEEE Trans. Smart Grid 2014, 5, 2980–2987. [Google Scholar] [CrossRef]
- Khorramabadi, S.; Bakhshai, A. Critic-based self-tuning PI structure for active and reactive power control of VSCs in microgrid systems. IEEE Trans. Smart Grid 2015, 6, 92–103. [Google Scholar] [CrossRef]
- Moafi, M.; Marzband, M.; Savaghebi, M.; Guerrero, J. Energy management system based on fuzzy fractional order PID controller for transient stability improvement in microgrids with energy storage. Int. Trans. Electr. Energy Syst. 2016, 26, 2087–2106. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Western Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Abido, M. Optimal design of power-system stabilizers using particle swarm optimization. IEEE Trans. Energy Convers. 2002, 17, 406–413. [Google Scholar] [CrossRef]
- Real Time Digital Simulator Power System and Control User Manual; RTDS Technologies: Winnipeg, MB, Canada, 2009.
- Forsyth, P.; Kuffel, R. Utility applications of a RTDS simulator. In Proceedings of the IPEC International Power Engineering Conference, Singapore, 3–6 December 2007; pp. 112–117. [Google Scholar]
- Li, Y.; Vilathgamuwa, D.; Loh, P. Design, analysis, and real-time testing of a controller for multibus microgrid system. IEEE Trans. Power Electron. 2004, 19, 1195–1204. [Google Scholar] [CrossRef]
- Hornik, T.; Zhong, Q. A Current-Control Strategy for Voltage-Source Inverters in Microgrids Based on H∞ and Repetitive Control. IEEE Trans. Power Electron. 2011, 26, 943–952. [Google Scholar] [CrossRef]
- Dai, H.-P.; Chen, D.-D.; Zheng, Z.-S. Effects of Random Values for Particle Swarm Optimization Algorithm. Algorithms 2018, 11, 23. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microgrid Parameters | Active Load Parameters | ||||||
|---|---|---|---|---|---|---|---|
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
| fs | 8 kHz | Vn | 381 V | Lf | 2.3 mH | Lc | 0.93 mH |
| Lf | 1.35 mH | Lc | 0.35 mH | Cf | 8.8 × 10−6 F | rc | 0.03 Ω |
| Cf | 50 × 10−6 F | Cb | 50 × 10−6 F | rf | 0.1 Ω | ||
| rf | 0.1 Ω | rc | 0.03 Ω | Rdc | 67.123 Ω | Cdc | 2040 × 10−6 F |
| ωn | 314.16 rad/s | ωc | 31.416 rad/s | ||||
| r1 + jx1 | (0.23 + j0.1) Ω | r2 + jx2 | (0.35 + j0.58) Ω | ||||
| PI Controller Parameters | Power-Sharing Parameters of the Three DG Units | ||||||
|---|---|---|---|---|---|---|---|
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
| kpv(Amp/Watt) | 17.268074 | kpc(Amp/Watt) | 3.0547 | mp | 3.79404 × 10−7 | nq | 9.36593 × 10−5 |
| 20.7258764 | 2.2025 | 6.75934 × 10−7 | 1.86121 × 10−5 | ||||
| 23.6522868 | 2.8311 | 1.71857 × 10−7 | 3.21349 × 10−5 | ||||
| kiv(Amp/Joule) | 64.356192 | kic(Amp/Joule) | 2.4811 | Active Load Parameters | |||
| 89.1177596 | 1.86315 | kpv_AL (Amp/Watt) | 4.79107648 | kpc_AL (Amp/Watt) | 2.3042 | ||
| −10.0262696 | 0.9311 | kiv_AL (Amp/Joule) | 62.5416616 | kic_AL (Amp/Joule) | −0.3198 | ||
| PLL Parameters | |||||||
| kPPLL | 50 | kIPLL | 1 | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hassan, M.A.; Worku, M.Y.; Abido, M.A. Optimal Design and Real Time Implementation of Autonomous Microgrid Including Active Load. Energies 2018, 11, 1109. https://doi.org/10.3390/en11051109
Hassan MA, Worku MY, Abido MA. Optimal Design and Real Time Implementation of Autonomous Microgrid Including Active Load. Energies. 2018; 11(5):1109. https://doi.org/10.3390/en11051109
Chicago/Turabian StyleHassan, Mohamed A., Muhammed Y. Worku, and Mohamed A. Abido. 2018. "Optimal Design and Real Time Implementation of Autonomous Microgrid Including Active Load" Energies 11, no. 5: 1109. https://doi.org/10.3390/en11051109
APA StyleHassan, M. A., Worku, M. Y., & Abido, M. A. (2018). Optimal Design and Real Time Implementation of Autonomous Microgrid Including Active Load. Energies, 11(5), 1109. https://doi.org/10.3390/en11051109