Charge Control and Operation of Electric Vehicles in Power Grids: A Review



1
Energy Systems Research Laboratory, Department of Electrical and Computer Engineering, Florida International University, Miami, FL 33174, USA
2
Electrical Engineering Department, King Fahd University of Petroleum & Minerals, Dharhan 31261, Saudi Arabia
*
Author to whom correspondence should be addressed.
Energies 2018, 11(4), 701; https://doi.org/10.3390/en11040701
Submission received: 20 February 2018
/
Revised: 13 March 2018
/
Accepted: 19 March 2018
/
Published: 21 March 2018
(This article belongs to the Section F: Electrical Engineering)
Abstract
:Electric Vehicles (EVs) and hybrid Electric vehicles (HEVs) are going to reshape the future of the transportation sector. However, adopting large numbers of EVs and HEVs will impact the electric utilities as well. Managing the charging/discharging of substantial numbers of distributed batteries will be critical for the successful adoption of EVs and HEVs. Therefore, this paper presents a review study about the recent control and optimization strategies for managing the charging/discharging of EVs. The paper covers different control and operation strategies reported in the literature as well as issues related to the real time dispatching of EVs in the smart grids. In addition, challenges related to the stochastic nature of the driving characteristics of EVs are considered. Finally, some open problems related to the energy management of EVs will be presented.
1. Introduction
The increased concerns about greenhouse emissions and the signing of the 21st Conference of the Parties (COP21) agreement in Paris in December 2015 by 175 countries [1,2] reaffirms the urgent need to strengthen the global response to climate change. The electricity and transportation sectors are major players in achieving the objective of limiting the rise of the average earth temperature to 2 °C. Electric Vehicles (EVs) and hybrid EVs (HEV) are seen as main contributors to achieving that objective as they reduce the carbon emissions in the transportation sector, which is responsible for almost one quarter (23%) of greenhouse emissions [3]. EVs help increase the energy efficiency since the electric motors used in EVs are more efficient than the internal combustion engines used in conventional vehicles. Also, EVs will help in the reduction of greenhouse emissions in the electricity sectors by supporting the integration of renewable energy resources in the global power generation mix. As such, EVs can increase the energy independence of nations by reducing the need for oil in the transportation sectors. They also help in increasing the quality of air in large polluted cities, which was one of the reasons of the Chinese national plan of “ten cities and thousands units” to promote the penetration of EVs into the public transportation sector (e.g., buses and taxis) across more than 25 cities.
With that increasing interest and growing deployment of electric vehicles, there will be a need to develop algorithms to control the charging/discharging of large number of EVs. EVs, from the power system point of view, can be regarded as producer or consumer (known as prosumer), depending on their operational mode of charging or discharging. Considerable numbers of EVs bring challenges or opportunities to the smart grid, depending on their control strategy. On one hand, they can cause negative impacts on the grid. These impacts can range from line overloading in both primary and secondary distribution systems to transformers overloading [4,5], line losses [6], low voltages and voltage unbalances [7]. On the other hand, EVs, as controllable loads, can provide more flexibility to the system operator in demand side management by better valley filling and peak shaving and increasing the system efficiency [8]. Also, they can provide ancillary services to the grid, such as regulation and reserve services [9]. This is especially important for power systems in the presence of high share of intermittent renewable energy resources where the system inertia is a big challenge. Considerable group of EVs can help mitigate the inertial loss by behaving as a large storage unit [10]. EVs can also be valuable for local voltage and reactive power support [11].
2. Background
At the beginning of the 20th century, the automobile began to dominate transportation, with three types of vehicles competing for market share, which are steam-powered engines, internal combustion engines (ICEs) and electric vehicles (EVs). Initially, electric vehicles fared well in comparison to competitors, with a smooth, quiet ride, no tailpipe emissions, and relatively reliable starting compensating for higher expense [12]. Despite the general acceptance with the public, EVs faced several drawbacks, some of which are still present to date, including relatively short driving range and unavailability of convenient, cost-effective charging stations beyond the major population centers. Because of these shortcomings, ICEs became much more attractive in comparison when the electric starter was invented in 1912, replacing a difficult to operate and often dangerous crank starter [12]. With ICEs’ easy starting and EVs limited distance per battery charge, the EV was fast becoming a niche market.
However, nowadays, with the rapid improvements in the battery technology in terms of higher battery density and lower costs (as shown in Figure 1), EVs have come to the picture again. In addition to these technological improvements, the need to mitigate climate change and air pollution will lead to deploying more EVs in the future. Figure 2 shows the evolution of the global EV stock and the distribution of EVs in different countries. The pattern shown in Figure 2 depicts that more EVs will be adopted in the future. Also, the introduction of more public charging stations, which will be explained later, helped making the EVs more acceptable.
When only considering plug-in electric vehicles (PEV); electric vehicles whose batteries can be charged by plugging into the electricity grid, vehicles can be divided into battery electric vehicles (BEV) and plug-in hybrid electric vehicles (PHEVs) [13]. The rated capacity, maximum charging rate and electric mileage range of some types of commercially available EVs [14] are shown in Table 1. Other types are available in [14] as well.
To increase the acceptance of EVs, EV manufacturers and different municipalities started to install and provide incentives for the installation of EV charging stations. Mainly, there are three types of charging stations which are AC level 1, AC level 2, and DC fast charging. AC level 1 and 2 charging stations that feed the EV with an AC current that is converted to DC current using the onboard charging equipment where the charger is in the vehicle. They differ in their voltage and current ratings. The third type, DC fast charging, provides high DC current to the vehicle. Due to the large current, the DC fast charger must be off-board [15]. Details about the different charging stations are given in Table 2. The expected spread of different charging stations according to their convenience is shown in Figure 3.
3. Control and Operation of Electric Vehicles
To date, most EVs operate in the unidirectional energy flow only, where the energy is coming from the grid or the source to charge the EVs in what is known as Grid-to-Vehicles (G2V) [16,17]. However, in the future, with more EVs on the road and more development in the communication infrastructure, other operational modes that allow for bidirectional energy flow to and from the vehicles can be feasible. These other operational modes can be divided to vehicle to grid mode (V2G), vehicle to building mode (V2B) [18,19,20], and vehicle to vehicle mode (V2V) [21]. In the V2G mode, aggregated power from a group of EVs can be used to support the grid by providing regulation services (to stabilize the voltage and frequency) or reserve services (to meet sudden increase in demand or outage of generation unit) [22,23,24,25]. In these cases, the EV owners must be given proper incentives to allow discharging their EVs. However, the management of such process will not be done through the owners themselves since a single EV cannot provide sufficient power to the grid. This can be done through a third party, or agent. This third party can be an aggregator or a parking lot operator which coordinates the charging of EVs.
In the V2B mode, the EV or the EVs can be integrated in the building energy management to minimize the cost of electricity for the owner or to use the EV as a storage to store excess power from renewable energy resource that might by on the top of the building (e.g., photovoltaic modules), and provide this energy back when there is a deficit in the supply.
In the V2V mode, energy flow among different EVs is allowed. This can be used by a parking lot operator that tries to maximize its profits by purchasing energy from the energy market and allocating this energy among the EVs according to the different owners’ preferences. In all cases of bidirectional power flow, battery degradation costs and reduced life time should be taken into consideration. Therefore, to control and coordinate the power flow, different control and optimization algorithms have been introduced in the literature. These algorithms vary widely between just mitigating the negative impacts of EV charging on the smart grid to making profits by the EV owners via participating as distributed resources [26].
In the first part of this paper, a general categorization for EV charge management algorithms is discussed. In the second part, the stochastic and the real time dispatching issues related to EV charge management are explored.
3.1. Deterministic Control Approaches
Integrating large numbers of EVs to the smart grid can cause considerable negative impacts. While the global, or system-wide, negative impacts on the bulk power system are likely only at large EV penetration levels [27], localized impacts on the distribution system are expected to be more significant even at moderate penetration levels. However, it was shown that with adequate management, the negative impacts of EVs can be reduced and the penetration depth of electric vehicles can be increased [28]. Several strategies have been introduced in order to control EV charging to prevent negative impacts on the grid. These can be classified into centralized, decentralized, and autonomous charging control strategies.
3.1.1. Centralized Charging Control
Many methods of EV charge management have focused on centralized control methods [22,23,24,25]. In centralized scheduling and control, the control algorithm of EVs is done centrally after collecting all the information about the EVs status and owners` preferences as well as other system data, such as market prices and system constraints and loading. The central controller can be an aggregator or the system operator. Centralized controllers usually result in the optimal utilization of the system resources but need a mature communication infrastructure [29]. Figure 4 shows a schematic for the centralized control method, where all data from the different participants in the system are sent to the main controller that processes all the data and sends back reference signals to be followed by different entities.
In [22], the authors used a control algorithm that uses the EV as another voltage control device in the system to mitigate the intermittency of distributed solar generations. The control algorithm consists of two stages where coordination between the EVs and the on-line tap changing transformer is done in the first stage. Then, in the second stage, a correction is made to the EV charging/discharging to provide a fast response to the fluctuation in the solar energy. The algorithm performed well in mitigating the overvoltage/under voltage problems in the system. However, the mobility of the EVs was not taken into consideration.
Electric vehicles on large scale were used to provide frequency regulation (FR) in the utility grid in [23], in which the authors presented a coordinated control strategy for large-scale EVs, BESSs (Battery Energy Storage Station) and traditional FR resources involved in Automatic Generation Control (AGC). It was shown that EVs and BESS can provide fast response in case of disturbance of short periods but if the disturbance continued for longer period, only the AGC will participate in the response continuously. In [24], the effect of EVs in providing ancillary services with wind integration was investigated. It was shown that the regulation power requirements from conventional generators were greatly reduced with the integration of a V2G system participating in load frequency control. In [25], a V2G algorithm was developed to optimize energy and ancillary services scheduling for a third party, called the aggregator. An optimal bidding formulation for EVs performing regulation up and down with only unidirectional power flow was developed. The simulations were performed on a simulated market with constant prices of regulation services over the study year.
None of the V2G studies in [23,24,25], however, addressed charging impacts on the distribution system and they require significant communications bandwidth to frequently dispatch the EVs . Additionally, the optimization requires significant computational power by the centralized controller.
In [30], multi-objective optimization was used to coordinate the charging of the plug-in EVs in a way that satisfies the network technical constraints as well as customer convenience. Heavy communication between the EV customers, vehicle coordinator and Energy hub operator at the distribution system company is required. It also requires the knowledge of load profiles.
In [31,32], economic-based charge control was investigated. It was found that price-based methods can sometimes cause distribution system overloads in the night hours due to low system prices but loss optimization would always flatten the load profile effectively. The method requires good communication infrastructure to perform well. In [33], a three-level hierarchical control algorithm was proposed for coordinating EVs charging at the provincial level in China. The user preferences are sent from the lower level from the different charging stations to a higher level on the municipals level where these data are added to other non-EV loads and pricing times and finally all the data from the different municipals are sent and processed by the provincial level operator. The algorithm is good for a vertically integrated utility system, where the conventional power system architecture is still being followed. Rebound effects, where there is a sudden load increase/decrease due to the instantaneous connection/disconnection of considerable number of EVs in the low/high price period, were considered and the rebound effects were solved using the coordination from upper municipal level coordinator. However, there was no consideration for the generation and network constraints.
Three approaches were studied in [34]; dumb charging, dual tariff policy and smart charging. Voltage profiles and lines congestion levels were evaluated, for the peak load hour, and for grid technical limits checking. Also, network lsses were evaluated for a typical daily load profile. Smart charging with hierarchical centralized control showed the best performance, and it showed that voltage is the limiting factor for higher integration of EVs.
Communication with the transformer substation for the sake of fair charging of electric vehicles as soon as possible was investigated in [35]. The connection rate of EVs keeps increasing until the set point limit is reached and then it varies up and down to maintain the set point level. At the end of each minute interval, the EV chargers will again attempt to connect with a connection rate probability. The random process used for connecting the electric vehicles ensures that each of the EVs has fair access to the available power. In [36], the authors proposed a centralized charging control that allows the EVs to find, via a distributed communication network, either the closest charging station, and then only be allowed to charge if there are no network constraints, or the charging station that will allow for the quickest charge.
In [37], an algorithm that provides real time energy management for a grid connected charging park was proposed. The algorithm uses a fuzzy controller to yield the charging rate of each PHEV based on the current and estimated power needed by the PHEVs, the estimated power generated by the PV, and the daily energy tariff. In case of high system loading, the output of the fuzzy controller is modified to avoid negative impacts on the grid.
A market mechanism for the optimal allocation of the charging capacity to the vehicles was proposed in [38]. The main purpose of the developed mechanism was to allow the owners of the vehicles to express their individual preference as well as ensure network stability. The author tried to open the door for multi-tiered user plans in which different users can be offered different resource allocation based on their preference and their willingness to pay. At the same time, network constraints such as total network loading, voltage drop and phase unbalance were taken into consideration.
In [39], a central electric vehicle charging optimization algorithm was proposed. The optimization was based on a receding horizon linear optimization problem. The authors took into consideration constraints such as the transformer and line limitations, phase unbalance and voltage stability within the network. As a simplification for the problem, the authors used a DC-equivalent model for the distribution network. Later, the algorithm was applied to the actual distribution network. In making this decision, the authors were looking not just at the current point in time, but at the best possible solution for a finite future charging horizon in discrete intervals since underlying conditions may change unexpectedly (such as vehicles arriving or departing).
Although Centralized control strategies can result in the optimal utilization of the system resources, it has a number of disadvantages:
- The need for large investment in the communication infrastructure, especially at the distribution level.
- An enormous number of messages needs to be communicated within a very limited period of time, which might cause communication issues, such as high latency and low quality of service.
- High computation burden for processing a large amount of data.
- Loss of the main communication link or problems with the central controller might have severe consequences on the system integrity.
- User privacy issues since the central controller has access to the data of all users.
3.1.2. Decentralized Charging Control
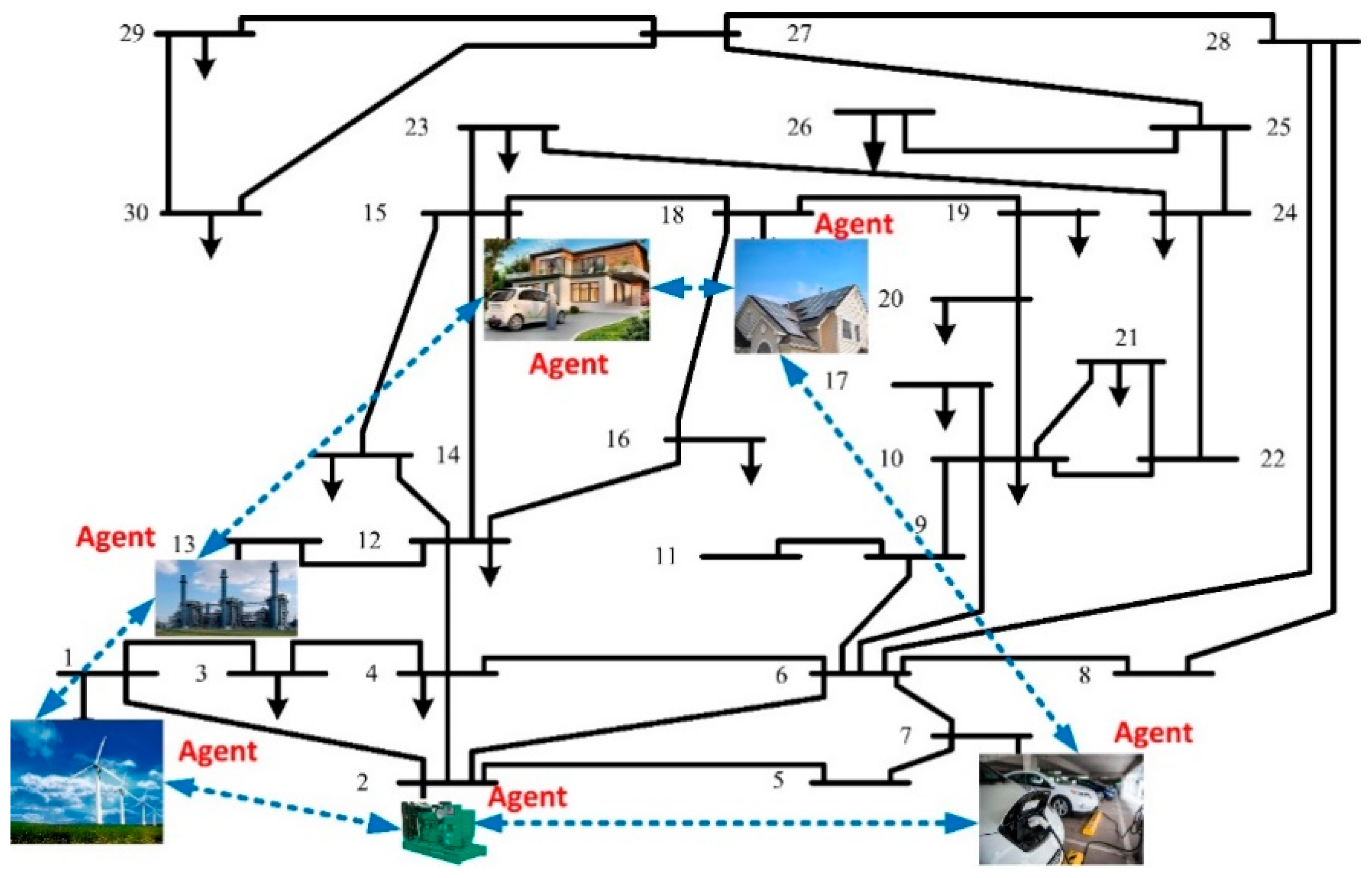
Other EV charge strategies have focused on decentralized control algorithms that use reduced communications infrastructure and computational burden. In decentralized, or distributed, control, the charging/discharging reference decision is not processed and generated using the aggregator or the system operator. Instead, the operator generates some sort of a signal to incentivize the participating EVs to do certain action [40]. However, each EV decides on its charging/discharging rate based on its own preference and no private information is sent back to aggregator or the operator [41]. Other works use multi-agent control algorithms [42]. A multi-agent system consists of two or more intelligent virtual or physical entities that cooperate and interact with each other to achieve a certain objectives related to their environments [43]. A schematic for the multi-agent approach is shown in Figure 5.
A decentralized controller using price-driven coordination between the utility and the EVs was considered in [4]. The authors used two gradient optimization methods, one that is based on cost and the other that is based on primal-dual approach, to minimize the total load variance in the distribution network. They assumed a uniform fleet with each car having a maximum capacity of 1.96 kW. The proposed approach changes the feedback control signal of each EV taking into consideration the state of the feeder supplying the EV. Although the method converges to a near-optimal load variance while ensuring that the feeders are not overloaded, special care should be given to the algorithm step size to ensure convergence. An electric vehicle for charging and discharging in households was considered in [41]. In this study, the impact of price-based demand response strategies on smart household load pattern variations is assessed. A forecasting procedure using hybrid wavelet transform (WT)—ANN was considered to accurately consider the price elasticity of demand. The household load datasets are acquired to perform optimal appliance scheduling considering an hourly varying price tariff scheme. The algorithm presented in [44] was based on EVs setting their own charge profiles according to price forecasts. In [45], a two-stage control algorithm was used to coordinate the charging of EVs in the presence of multiple aggregators. The algorithm takes into consideration the network constraints. A third-party price coordinator was introduced to generate a fair price signal between the distribution system operator, who tries to efficiently operate the system without violations and the aggregators, who try to charge the EVs according to their preferences and with the lowest cost. Although the method achieves satisfactory results, the used linear programming model and assumptions did not accurately characterize the charging process of the EVs by neglecting mobility aspects and battery efficiency.
In [46], a large population of plug-in electric vehicles was used to mitigate wind intermittency and frequency regulation. Each EV adjusts its charging or discharging power in response to a communal virtual price signal and based on its own urgency level of charging. The proposed scheme created a cost saving opportunity for both the EV owner and the utility. In [47], a pricing scheme that conveys price and quantity information to the load aggregator (LA) was developed and compared with the pricing only scheme. It was shown that the price/quantity scheme is insensitive to the regularization penalty and requires less computation capability than the pricing only scheme. The pricing scheme was to minimize the charging costs for the EV owner. If the objective was changed to profit maximizing for the utility, the method loses its beneficial properties.
Game theory has been recently used by multiple researchers [48,49,50,51,52,53] to coordinate the charging process of EVs by achieving the Nash equilibrium where no player has anything to gain by changing his/her own strategy. In [48], the coordination of EVs was performed using non-cooperative games to minimize generation cost. In [49], optimal demand-side management (DSM) is achieved using a model derived from game-theory. Each consumer’s scheduler is required to broadcast its consumption schedule to all other participants in the DSM program. In [53], a mean field game theoretic approach was proposed to control the charging of the EVs without increasing the grid peak and taking the customers` preferences into consideration.
In [54], a distributed framework was suggested to charge the EVs at comparable charging rates without overloading the upstream service transformer. In [55], two electric vehicle charging algorithms were proposed, one centralized and one distributed, and their performances in simulations that used real vehicle data were compared, on a model that is based on a real low voltage network in northern Melbourne, Australia. The proposed algorithm for distributed charging used probability criteria to decide whether the vehicle will be charged or not. This probability is based on the node voltage and the state of charge (SOC) of the EV’s battery. It does not take into consideration the maximum charging rate. The method can be used only up to 25% penetration level and it is sensitive to the location of vehicles in the network; when vehicles are connected near the far ends of the network, there is a significantly increased risk of voltage drop.
In [56,57], control of energy flow between EVs and the grid has been demonstrated using fuzzy logic controllers (FLC) mainly for voltage compensation and load flattening. The proposed technique assumes that the EVs are available to be charged and discharged. It also assumes that all EVs in a certain area will charge from a certain charging station and the charging station will work most likely as an aggregator. In [58], the effectiveness of distributed additive increase and multiplicative decrease (AIMD) charging algorithms at mitigating the impact of domestic charging of EVs on low-voltage distribution networks was investigated. The proposed method tries to achieve fair charging among different vehicles without violating the voltage constraint or overloading the substation and at the same time it took into consideration, the time-of-use prices. To achieve the mentioned objectives, a simple radial communication between the distribution station and the vehicles is used.
These, and other similar decentralized charging methods, rely on reduced communications infrastructure from the utility or the aggregator, even if there is no communication from the EVs back to the grid. Although, the decentralized control algorithms reduce the need for expensive communication infrastructure and the computation burden, they have the following disadvantages:
- They do not always ensure optimality and best use of resources.
- They may result in a rebound effect, which can be harmful to the system.
- They have a limited ability in participating in ancillary service markets.
- They are vulnerable to changes in customers’ behavior.
3.1.3. Autonomous Charging Control
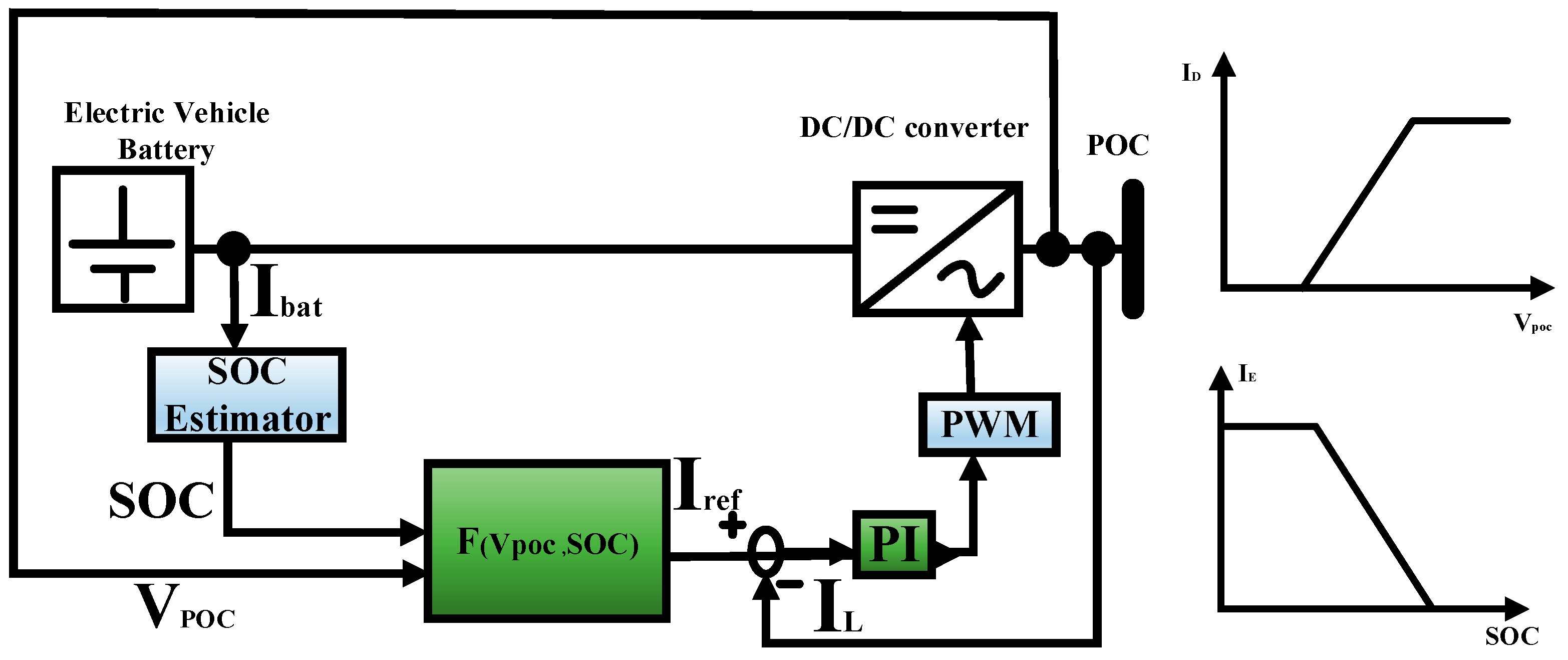
Autonomous charging control algorithms were considered in the literature as a part of decentralized algorithms but with no communication at all. However, due to the increased work in that type of controllers, we preferred to consider it as a third type of control algorithms. Autonomous controllers can be the first step for integrating a considerable number of EVs in the absence of communication infrastructure in the distribution system in many countries. An autonomous controller mainly depends on local inputs to decide on the charging/discharging rate. Also, an autonomous controller can be viewed as a lower layer of a more comprehensive decentralized strategy, where decisions should be taken on the secondary distribution system instantaneously. An example of an autonomous droop controller is shown in Figure 6.
In [59], voltage-constrained local optimization of EV charging was suggested. Each EV in the system optimizes its own charging aiming to maximize its charging rate while not violating nodal voltage or feeder loading constraints. However, it does not consider charging fairness and battery SOC of each EV. In fact, comparable performance can be obtained using simpler control structures.
In an autonomous controller, provision of ancillary services such as secondary and tertiary frequency regulation are harder to do due to the absence of communication, hence the direct coordination of the charging/discharging of EVs. However, the primary frequency and voltage regulations are possible using the droop controllers [60,61]. A voltage-feedback control structure for EVs in a distribution system was suggested in [62]. However, the issue of fairness among EVs connected to different buses in the system was not addressed in [62]. SOC dependency of charging rate was not considered, either. Fair charging means that EVs with similar initial SOC should charge at the same charging rate irrespective of their location in the distribution system. Since some of the EVs are connected to the upstream buses near the substation, they have the advantage of having a higher charging rate due to the higher voltage than those connected to downstream buses. In [63], the authors propose an active power/frequency (P–f) droop control strategy to be implemented at the EV coupling inverter where the EV will autonomously adapt its power output based on the microgrid (MG) frequency. This work proposed the use of this control strategy during service restoration. In [64], The authors proposed an autonomous distributed V2G control scheme where electric vehicles supply a distributed spinning reserve according to the frequency deviation at the plug-in terminal. The authors in [65] proposed a method that uses only local information which is the node voltage, SOC and time of required charging given by the user and based on that information, the algorithm controls the charging rate. It uses an averaging technique method to find the set point voltages used in the controller that mainly depends on historical data. Fairness was not completely proved in the results. In [66], the author proposed an effective, autonomous, voltage-based control scheme for charging electric vehicles. This control scheme coordinates charging among the EVs connected to the distribution nodes in a fair manner so that voltage violations are avoided. The proposed method uses constant gain values and the upstream point charges faster than the downstream one. In [67], The author developed an autonomous voltage feedback control structure for EV charging based on the model in [66]. This control structure relies on the local voltage measurement at the point where the EV is plugged in. It compares the system measured voltage at the point of charging with a predefined reference voltage. The drawback of the proposed algorithm is that it needs to update the reference set points with each seasonal variation, and the upstream point charges relatively faster than the downstream one. In [68,69], a new voltage based EV chargers was proposed. The controller used local voltage as one of the inputs and the state of charge as the second input. Then, a nonlinear exponential controller decides on the charging rate based on the inputs. The aim for this work was to eliminate the need for seasonal changing of the controller set-points mentioned in the previous autonomous work. This is done by keeping the voltage set-point as a constant value for all the EVs at the different buses and relaxing the controller sensitivity to the voltage to ensure fair charging among the EVs. A fuzzy-based autonomous controller was introduced in [70] to eliminate the drawback of slow charging rate noted in [68,69] and at the same time ensure a fair charging rate among the different EVs.
Autonomous charging algorithms eliminate the need for the communication infrastructure and can also be used as the first layer of hierarchical control algorithms where decisions should be done at the local levels. Also, autonomous control algorithm is the only option for utilities with no available communication infrastructure at the distribution level. However, if autonomous control algorithm is used alone, it will have the following disadvantages:
- Lack of the optimal operation of the system.
- Lack of ability to participate in ancillary service markets.
- May result in a rebound effect.
- Vulnerable to changes in customers’ behavior.
Based on the above discussion about the different types of controllers that are used to manage the charging of EVs, a summary of the different papers discussed above is given in Table 3 below. Also, proper classification of control algorithms and their compatibility with both vertically integrated and restructured utility systems can be reached.
Depending on the utility structure, communication infrastructure, electricity market design and the level of sector liberalization, one or more of the controllers` types can be used. For example, multiple central aggregators can be used in a restructured utility system to achieve the reliable and cost-effective operation of their zones or the group of entities they have access to their information. Also, one central controller can be used to control the vertically integrated system.
As the future electric utilities move toward more deregulated ones, decentralized and multi-agent systems will be more suitable due to their several advantages. For instance, current demand side management programs can send minimum signals to provide guidance to a decentralized controller that makes the final decision based on the local level.
Autonomous controllers, on the other hand, can be the first step for integrating considerable number of EVs in the absence of communication infrastructure in the distribution system in many countries. Also, having autonomous control at the lowest level of the centralized/decentralized controller is advantageous since it reduces the communications traffic to the V2G aggregator.
3.2. Real Time and Stochastic Operation Approaches
When dealing with real world scenarios, the optimal operation of EV charging becomes more challenging. Since in real time (RT), the aggregator or the operator receives a regulation signal update once every 2–6 s, the RT strategy needs to be computationally efficient. In addition, this strategy must ensure meeting the regulation signal while considering EV characteristics and EV owners’ preferences. Moreover, different kinds of uncertainties are involved in the scheduling process. Generally, there are three major types of uncertainties when dealing with EV charging. These types are: renewable energy uncertainties [71], market uncertainties [72], and EV mobility uncertainties [73]. An aggregator or system operator should take into account these kinds of uncertainties during the scheduling of EV charging/discharging. Also, the communication latency and EV owner preference should be considered.
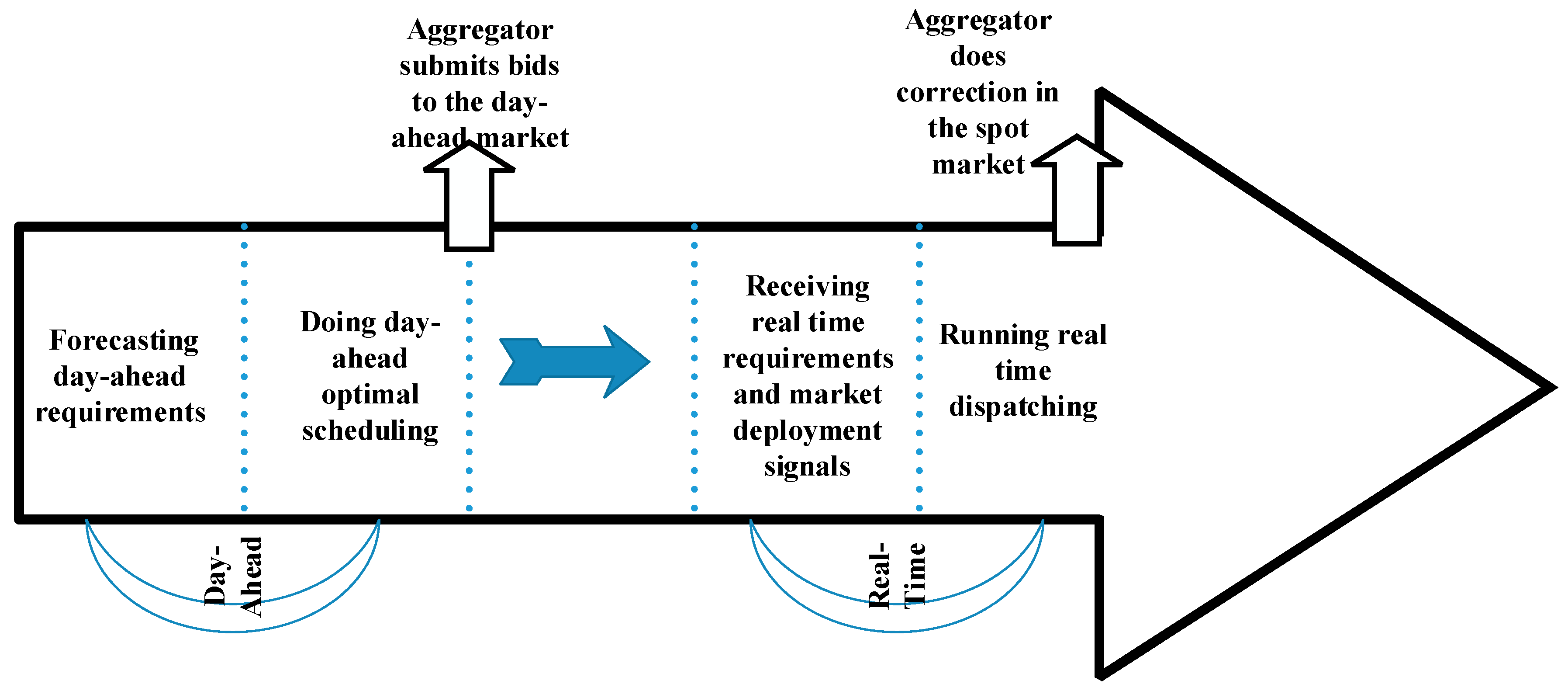
As a market participant who contributes to energy and ancillary service markets, an electric vehicle aggregator (EVA) or operator is required to submit energy schedules to the wholesale energy market and capacity schedules, e.g., frequency regulation and reserves. These schedules are submitted to the concerned markets on the day ahead. In real-time, if no ancillary service is requested by the system operator, the EVA is expected to abide by its own energy schedules. However, if an ancillary service, e.g., frequency regulation, is requested, the EVA is expected to follow the ancillary service command signal. This is performed by moving some or all EVs above or below their scheduled charging rates. A brief time line for the operation of the electric vehicle aggregator or the system operator is shown in Figure 7.
The EVA, therefore, needs day ahead (DA) and real time (RT) charge management strategies. The DA strategy concerns the optimal schedules of energy and regulation capacities that the EVA sends to the corresponding markets on the day ahead. Then, the EVA needs an RT strategy for EV dispatching that helps deciding which EVs should be moved from their DA scheduled charging rates and by how much.
3.2.1. Day-Ahead Scheduling with Uncertainties
Uncertainties, if not included in the day-ahead scheduling, might greatly affect the system performance from the economic and technical standpoints. To deal with uncertainties, several modelling methodologies have been developed such as probabilistic methods [74], stochastic optimization [75], robust optimization [76], and fuzzy optimization [17,77].
Managing a large number of hybrid EVs at city parking lot was considered in [74]. The authors tried to maximize the available energy in the EV for the next time step taking into account different uncertainties of the driving characteristics such as the arrival time, departure time and initial state of charge.
These data were based on normal distribution curves that were validated using actual transportation statistics. The drawback of the proposed algorithm is the need of a high computation requirement to process large amounts of data. Minimizing the overall load variance in the presence of demand response was considered in [75]. The stochastic nature of the availability (arrival and departure times) of the EVs was considered, but the energy uncertainties were not taken into consideration. In [78], binary particle swarm optimization with adapting differential evolution was proposed to handle the uncertainties associated with renewable energy. The authors tried to minimize the cost of generating electric power from the conventional fossil units by using the flexibility of the EVs to accommodate as much renewable power as possible. In [79], the authors used unidirectional V2G to mitigate the risk of energy trading by a load-serving-entity (LSE) which uses thermal and wind power sources and has a high penetration of EVs. Mixed integer stochastic programming is used to formulate the problem of coordinating V2G with energy trading with an objective of finding the optimal bids that will maximize the LSE profits. In [80,81], a bi-layer optimization technique was used to accommodate renewable energy to enhance the gird performance in the presence of EVs. Robust optimization to handle the uncertainties in prices for V2G optimization was considered in [82]. In [78,79,80,81,82], EV mobility and energy uncertainties were not taken into consideration. In [76], robust optimization was suggested to coordinate EVs scheduling with thermal generators to provide ancillary services to the grid. The proposed robust optimization algorithm can lead to conservative solutions. A hierarchical optimization algorithm for scheduling the EVs for profit maximization while satisfying the transformer constraints was considered in [83]. It was assumed that the energy and the availability of the EVs are stochastic based on probability distribution. The drawback of the proposed algorithm is that the computation burden increases exponentially with the number of the EVs and the length of the operating time frame. Most of the algorithms mentioned previously focus on a large number of EVs whether they were coordinated by the utility or an aggregator. For these cases, the EV characteristics and mobility can be forecasted with a reasonable accuracy due to the law of large number. This is not the case for small number of EVs like the case of parking garage with a limited number of EVs. This problem still needs more investigation. EV parking garage scheduling in a city using historical data of EV mobility and parking patterns was considered in [84]. The authors tried to maximize the total profits and the total number of EVs that fulfill their requirements. The operator schedules the charging from the time point at which the electricity price is the cheapest irrespective of the EV time availability, which is risky and sub-optimal. In [73], fuzzy optimization was used for dealing with the uncertainties associated with EV mobility and market prices. The authors turned the deterministic optimization problem into a fuzzy optimization problem to handle the different uncertainties of EVs while trying to maximize the profits of an EV parking lot. Although the methodology took into consideration the uncertainties of EVs and market prices, renewable energy uncertainties were not considered. A stochastic model for capturing the behavior of EVs was considered in [85]. To simplify the model, the whole EV fleet was considered to be the same.
3.2.2. Real Time Dispatching
Once day-ahead scheduling has been submitted, the aggregator or the operator needs to abide by his bidding in the real time; otherwise, a penalty will be applied. Therefore, there is a need for real time dispatching algorithms to ensure proper operation of the system.
A number of studies reported in the literature relied on real time incremental dispatch methods in the context of optimal schedules. That is, it was assumed that the aggregator would send dispatch signals to all participating EVs in order to respond to regulation/reserve deployment commands requested by the system operator. A major issue with incremental dispatch, also called droop-based dispatch, is that the charging stations required for incremental power changes are more expensive than the simpler charging stations that accept on/off commands only. This is because additional hardware is needed to modulate charge rates continuously. Also, standard charging stations commercially available today do not support the communication requirements needed for continuous modulation of charge rates [86]. Another issue is that a new dispatch signal needs to be sent to every EV participating in V2G at every regulation command instance, which has a high resolution of 2–6 s.
Lately, some authors presented algorithms for managing EV charging that are suitable for RT adoption. In [37,74,87,88,89,90], RT charge management mechanisms were proposed. However, provision of regulation services was not considered in [37,74,87,88,89], and market mechanisms were not considered in [90]. In [91], a three-stage framework for DA and RT charge management for an EVA providing regulation services is presented. However, it involves a large number of parameters that needs to be set carefully to warrant a successful outcome. In [92], the suggested framework employs model predictive control (MPC) to obtain the RT charging set point for each EV. In [91,92], all participating EVs have to be updated every time a regulation signal is received by the EVA, which increases the communication burden. In [93], another framework for DA and RT EV charge management is proposed in the presence of significant renewable penetration. In [94,95] adaptive real-time scheduling algorithms have been proposed to manage the congestions in smart power systems considering the thermal capacity of transmission lines and the practical constraints for real-time applications.
Considerable attention has been paid in the literature to the impact of communication on power system control. This is motivated by the fact that higher communication traffic can result in higher latency, which may have a de-stabilizing effect on the power system. This is especially true for frequency regulation, or load frequency control (LFC), of bulk power systems and microgrids. In addition, high communication traffic requires communication channels with high bandwidths and gives rise to high communication power consumption.
New emerging concepts that use developments in radio frequency identification RFID and the 5G technologies have started to gain traction in the literature [96]. To address the abovementioned challenges, there must be robust and low-cost communication infrastructures that can support rapid and secure information exchange as well as consistent and efficient design of communication protocols and architectures. The Internet of things (IoT) and cloud computing, based on the 5G technologies, as new computing models, could accelerate the establishment of such infrastructures. The Internet of Things (IoT) is a new concept that attempts to combine multiple aspects and technologies coming from different approaches. According to the International Telecommunication Union, the IoT is defined as “a technological revolution that represents the future of computing and communications, and its development depends on dynamic technical innovation in a number of important fields, from wireless sensors to nanotechnology [97]. Omnipresent computing, pervasive computing, internet protocol, sensing technologies, communication technologies, and embedded devices are merged together in order to form a system where the real and digital worlds meet and are continuously in symbiotic interaction [98,99].
In [100], the authors proposed the use of IoT to provide an automatic electric vehicle charging management. The objective of their scheme was to coordinate the charging of large-scale EVs in multiple residential buildings by leveraging the fast-distributed optimization capability of the alternating direction method of multiplier (ADMM). A platform that allows battery analysis and control of the charging and discharging processes through a web application using pre-defined profiles was introduced in [101]. A new communication architecture based on cloud computing was proposed in [102], where the authors presented a scheduling algorithm in order to attribute priority levels and optimize the waiting time to plug-in at each charging station. The potential of V2G services supported by fog-based and cloud-based hybrid computing model in 5G networks was investigated in [103]. The authors considered the high mobility of EVs and the dynamics of the mobile computing resources in their investigation, and some possible solutions were suggested. To enable flexible and efficient connections, quality of service guarantee, and multiple concurrent support requests, the authors in [104] proposed the software-defined internet of vehicles, which is able to tackle the above-mentioned issues by adopting the software-defined networking framework. Despite the initial work to employ the advantages of the 5G and the IoT in electric vehicle charging, more work is needed to fully explore the potential of these innovative technologies.
In addition to IoT, other studies have addressed the impact that the performance of the communication infrastructure has on the smart grid. In [105], LFC performance has been examined considering a number of communication network characteristics, such as latency, bandwidth, and change in communication topology. The need for strict latency requirements in smart grids was emphasized in [106]. A model for communication latency as applied to the smart grid was introduced in [107]. A method was presented in [108] for estimating the delay margin requirements for the stability of LFC loop. In [109], the impact of communication delays on LFC of islanded microgrids is studied.
Recognizing the impact of communication network performance on the smart grid, a few studies have presented methods for scheduling EV charging with low dispatch signal traffic. The main focus of [110] was to provide a valley-filling schedule for typical peak-valley daily residential profiles. It offered a user-oriented approach designed to satisfy the EV owner while minimizing the variance and peak of the aggregated load profile as desired by the grid operator. In [111], another approach to manage charging for valley-filling is put forward. The work presented in [110,111] did not tackle the provision of frequency regulation, which is very challenging due to the high resolution of the regulation signals.
In [112], a simple discrete algorithm was proposed for an aggregator-driven RT charge dispatch of an EV fleet that provides regulation services. The suggested algorithm used a few heuristic rules to decide on which EVs to be turned ON/OFF in order to meet the regulation signal under reduced dispatch traffic. Because it was based on heuristics, dispatch traffic optimality and fairness were not guaranteed. Generally, there are potential gains that can be made through optimizing the EV dispatch to perform regulation and reserves services. If EVs are charged more efficiently, additional savings in the communications bandwidth requirements can be achieved.
4. Open Research Problems
Despite the influx of research activities on this topic in recent years, a number of interesting questions are yet to be addressed properly and comprehensively. Most of the reported work either ignored, or only partly addressed, the impacts of the communication infrastructure on EV charge management. The integration of more thorough models for the communication infrastructure into the EV charging strategies is still needed. This detailed communication modeling is especially important for EV charge management policies that facilitate the provision of ancillary services to the grid. The issues of communication channel bandwidth limitation, latency, and bit rate, among others, can have a profound impact on the EV responsiveness.
Another pressing issue involves the development of reliable planning tools for EV charge control, aggregation, and EV-rich system modeling. For example, distribution system planning models for utilities that anticipate a significant penetration of EVs into their system are yet to be developed. These models are instrumental for distribution system planners to help them make more informed long-term decisions, such as sizing and siting of distribution substations, sizing and routing of medium voltage feeders, sizing and siting of volt/var control devices, and so on. An EV aggregation investment planning model that addresses the concerns of an investor interested in EV aggregation is also largely absent.
Another issue that is only partly addressed is the interaction of the stochastic natures of EVs, renewable energies, especially wind and solar energy, and conventional unit commitment. Due to the stochastic nature of renewable energies and EVs, old conventional methods for optimal unit commitment should be re-adapted to consider these stochastic entities to ensure the optimal and reliable operation of the grid.
Also, driver-less EVs are expected to be a disruptive technology in the coming years. Although some research activities have recently dealt with driver-less EVs, very little has been reported on the impact of a large fleet of these EVs on the local grid. The possibility of utilizing driver-less EVs in the grid advantage is a research focus area. Charge strategies that are suitable for these types of EVs, considering their unique characteristics and limitations, are greatly needed. For example, for a fleet of shared autonomous EVs, when to dispatch each EV for transportation purposes and when to park it for charging is an interesting question yet to be addressed properly. The fact that autonomous EVs can be re-located effortlessly provokes the thought of using them as mobile sources for power injection to improve the distribution system’s resilience.
5. Conclusions
This paper surveys the recent research activities related to charge management of electric vehicles in a smart grid environment. The impact of EV charge management on the smart grid is first presented. Then, EV charge management strategies are divided into three categories. Centralized EV charge control, which requires well-developed communication infrastructure, is highlighted. Decentralized charge control, which has limited communication requirements, is then discussed. In addition, communication-free, autonomous EV charge control is explored. The different approaches reported in the literature for addressing the stochastic nature of EV charge control process are overviewed. Special emphasis is also given to the issue of strategies suitable for real-time EV charge dispatch.
Author Contributions
Samy Faddel and Osama A. Mohammed collected and analyzed the data available about the different control techniques reported in the literature. Ali. T. Al-Awami analyzed and discussed the issues related to the challenges of real-time charging and the effect of the communication infrastructure on the optimal operation of the EVs. All the authors contributed to the write-up of the manuscript where Samy Faddel and Osama A. Mohammed wrote the sections of the deterministic control technique and Ali. T. Al-Awami wrote the section of the real time and stochastic operation approaches. All the authors contributed in the write-up of Section 4.
Conflicts of Interest
The authors declare no conflict of interest.
References
- COP 21 Paris France Sustainable Innovation Forum 2015 Working with UNEP. Available online: http://www.cop21paris.org/ (accessed on 7 May 2017).
- List of 175 Signatories to Paris Agreement 15 States Deposit Instruments of Ratification. UNFCCC. Available online: http://newsroom.unfccc.int/paris-agreement/175-states-sign-paris-agreement/ (accessed on 6 October 2017).
- International Energy Agency. Global EV Outlook 2017; IEA: Paris, France, 2017. [Google Scholar]
- Ghavami, A.; Kar, K.; Gupta, A. Decentralized Charging of Plug-in Electric Vehicles With Distribution Feeder Overload Control. IEEE Trans. Autom. Control 2016, 61, 3527–3532. [Google Scholar] [CrossRef]
- Masoum, M.A.; Moses, P.S.; Hajforoosh, S. Distribution transformer stress in smart grid with coordinated charging of Plug-In Electric Vehicles. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012; pp. 1–8. [Google Scholar]
- Sortomme, E.; Hindi, M.M.; MacPherson, S.D.J.; Venkata, S.S. Coordinated Charging of Plug-In Hybrid Electric Vehicles to Minimize Distribution System Losses. IEEE Trans. Smart Grid 2011, 2, 198–205. [Google Scholar] [CrossRef]
- Richardson, P.; Flynn, D.; Keane, A. Impact assessment of varying penetrations of electric vehicles on low voltage distribution systems. In Proceedings of the 2010 IEEE Power and Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–6. [Google Scholar]
- De Craemer, K.; Vandael, S.; Claessens, B.; Deconinck, G. An Event-Driven Dual Coordination Mechanism for Demand Side Management of PHEVs. IEEE Trans. Smart Grid 2014, 5, 751–760. [Google Scholar] [CrossRef]
- Sarker, M.R.; Dvorkin, Y.; Ortega-Vazquez, M.A. Optimal Participation of an Electric Vehicle Aggregator in Day-Ahead Energy and Reserve Markets. IEEE Trans. Power Syst. 2016, 31, 3506–3515. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, Z.; Xu, Z.; Song, Y. Evaluation of Achievable Vehicle-to-Grid Capacity Using Aggregate PEV Model. IEEE Trans. Power Syst. 2017, 32, 784–794. [Google Scholar] [CrossRef]
- Mojdehi, M.N.; Ghosh, P. An On-Demand Compensation Function for an EV as a Reactive Power Service Provider. IEEE Trans. Veh. Technol. 2016, 65, 4572–4583. [Google Scholar] [CrossRef]
- Borden, E. Electric Vehicles and Public Charging Infrastructure: Impediments and Opportunities for Success in the United States; Center for Transportation Research: College Station, TX, USA, 2013. [Google Scholar]
- Pelletier, S.O.G.; Laporte, J. Battery Electric Vehicles for Goods Distribution: A Survey of Vehicle Technology, Market Penetration, Incentives and Practices; Interuniversity Research Centre on Enterprise Networks, Logistics and Transportation: Wellington, New Zealand, 2014. [Google Scholar]
- Compare Electric Cars and Plug-in Hybrids—List of Features, Price, Range, Model|PluginCars.com. Available online: http://www.plugincars.com/cars (accessed on 10 October 2017).
- New West Technologies. Costs Associated with Non-Residential Electric Vehicle Supply Equipment; New West Technologies: Portland, OR, USA, 2015. [Google Scholar]
- Akhtar, G.M.A.; Al-Awami, A.T.; Sortomme, E.; Abido, M.A.; Ahmed, M.W. Autonomous electric vehicle charging management over real time digital simulator. In Proceedings of the 2014 IEEE PES General Meeting|Conference Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Ansari, M.; Al-Awami, A.T.; Sortomme, E.; Abidoeric, M.A. Coordinated Bidding of Ancillary Services for Vehicle-to-Grid Using Fuzzy Optimization. IEEE Trans. Smart Grid 2015, 6, 261–270. [Google Scholar] [CrossRef]
- Contreras-Ocana, J.E.; Sarker, M.R.; Ortega-Vazquez, M.A. Decentralized Coordination of a Building Manager and an Electric Vehicle Aggregator. IEEE Trans. Smart Grid. 2016. [Google Scholar] [CrossRef]
- Thomas, D.; Ioakimidis, C.S.; Klonari, V.; Vallée, F.; Deblecker, O. Effect of electric vehicles’ optimal charging-discharging schedule on a building’s electricity cost demand considering low voltage network constraints. In Proceedings of the 2016 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Ljubljana, Slovenia, 9–12 October 2016. [Google Scholar]
- Wu, D.; Zeng, H.; Lu, C.; Boulet, B. Two-Stage Energy Management for Office Buildings With Workplace EV Charging and Renewable Energy. IEEE Trans. Transp. Electrification 2017, 3, 225–237. [Google Scholar] [CrossRef]
- You, P.; Yang, Z. Efficient optimal scheduling of charging station with multiple electric vehicles via v2v. In Proceedings of the 2014 IEEE International Conference on Smart Grid Communications (SmartGridComm), Venice, Italy, 3–6 November 2014; pp. 716–721. [Google Scholar]
- Cheng, L.; Chang, Y.; Huang, R. Mitigating Voltage Problem in Distribution System with Distributed Solar Generation Using Electric Vehicles. IEEE Trans. Sustain. Energy 2015, 6, 1475–1484. [Google Scholar] [CrossRef]
- Zhong, J.; He, L.; Li, C.; Cao, Y.; Wang, J.; Fang, B.; Zeng, L.; Xiao, G. Coordinated control for large-scale EV charging facilities and energy storage devices participating in frequency regulation. Appl. Energy 2014, 123, 253–262. [Google Scholar] [CrossRef]
- Pillai, J.R.; Bak-Jensen, B. Integration of Vehicle-to-Grid in the Western Danish Power System. IEEE Trans. Sustain. Energy 2011, 2, 12–19. [Google Scholar] [CrossRef]
- Sortomme, E.; El-Sharkawi, M.A. Optimal Scheduling of Vehicle-to-Grid Energy and Ancillary Services. IEEE Trans. Smart Grid 2012, 3, 351–359. [Google Scholar] [CrossRef]
- Kempton, W.; Letendre, S.E. Electric vehicles as a new power source for electric utilities. Transp. Res. Part Transp. Environ. 1997, 2, 157–175. [Google Scholar] [CrossRef]
- Su, W.; Eichi, H.; Zeng, W.; Chow, M.-Y. A Survey on the Electrification of Transportation in a Smart Grid Environment. IEEE Trans. Ind. Inform. 2012, 8, 1–10. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Polenz, S.A.; Moreira, C.L.; Cherkaoui, R. Identification of control and management strategies for LV unbalanced microgrids with plugged-in electric vehicles. Electr. Power Syst. Res. 2010, 80, 898–906. [Google Scholar] [CrossRef]
- Mukherjee, J.C.; Gupta, A. A Review of Charge Scheduling of Electric Vehicles in Smart Grid. IEEE Syst. J. 2015, 9, 1541–1553. [Google Scholar] [CrossRef]
- Moeini-Aghtaie, M.; Abbaspour, A.; Fotuhi-Firuzabad, M.; Dehghanian, P. Optimized Probabilistic PHEVs Demand Management in the Context of Energy Hubs. IEEE Trans. Power Deliv. 2015, 30, 996–1006. [Google Scholar] [CrossRef]
- Steen, D.; Tuan, L.A.; Carlson, O.; Bertling, L. Assessment of Electric Vehicle Charging Scenarios Based on Demographical Data. IEEE Trans. Smart Grid 2012, 3, 1457–1468. [Google Scholar] [CrossRef]
- Wu, D.; Aliprantis, D.C.; Ying, L. Load Scheduling and Dispatch for Aggregators of Plug-In Electric Vehicles. IEEE Trans. Smart Grid 2012, 3, 368–376. [Google Scholar] [CrossRef]
- Xu, Z.; Su, W.; Hu, Z.; Song, Y.; Zhang, H. A hierarchical framework for coordinated charging of plug-in electric vehicles in China. IEEE Trans. Smart Grid 2016, 7, 428–438. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Soares, F.J.; Almeida, P.R. Identifying management procedures to deal with connection of electric vehicles in the grid. In Proceedings of the 2009 IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; pp. 1–8. [Google Scholar]
- Harris, C.; Dusparic, I.; Galván-López, E.; Marinescu, A.; Cahill, V.; Clarke, S. Set point control for charging of electric vehicles on the distribution network. In Proceedings of the 2014 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 19–22 February 2014. [Google Scholar]
- Erol-Kantarci, M.; Mouftah, H.T. Supply and load management for the smart distribution grid using wireless networks. In Proceedings of the 2012 Japan-Egypt Conference on Electronics, Communications and Computers (JEC-ECC), Alexandria, Egypt, 6–9 March 2012; pp. 145–150. [Google Scholar]
- Mohamed, A.; Salehi, V.; Ma, T.; Mohammed, O. Real-Time Energy Management Algorithm for Plug-In Hybrid Electric Vehicle Charging Parks Involving Sustainable Energy. IEEE Trans. Sustain. Energy 2014, 5, 577–586. [Google Scholar] [CrossRef]
- De Hoog, J.; Alpcan, T.; Brazil, M.; Thomas, D.A.; Mareels, I. A Market Mechanism for Electric Vehicle Charging Under Network Constraints. IEEE Trans. Smart Grid 2016, 7, 827–836. [Google Scholar] [CrossRef]
- De Hoog, J.; Alpcan, T.; Brazil, M.; Thomas, D.A.; Mareels, I. Optimal Charging of Electric Vehicles Taking Distribution Network Constraints Into Account. IEEE Trans. Power Syst. 2015, 30, 365–375. [Google Scholar] [CrossRef]
- Faddel, S.; Mohammed, O. Automated distributed electric vehicle controller for residential demand side management. In Proceedings of the 2017 IEEE Industry Applications Society Annual Meeting, Cincinnati OH, USA, 1–5 October 2017; pp. 1–8. [Google Scholar]
- Paterakis, N.G.; Tascikaraoglu, A.; Erdinc, O.; Bakirtzis, A.G.; Catalao, J.P.S. Assessment of Demand-Response-Driven Load Pattern Elasticity Using a Combined Approach for Smart Households. IEEE Trans. Ind. Inform. 2016, 12, 1529–1539. [Google Scholar] [CrossRef]
- Karfopoulos, E.L.; Hatziargyriou, N.D. A Multi-Agent System for Controlled Charging of a Large Population of Electric Vehicles. IEEE Trans. Power Syst. 2013, 28, 1196–1204. [Google Scholar] [CrossRef]
- McArthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponce, F.A.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part I: Concepts, Approaches, and Technical Challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef] [Green Version]
- Gan, L.; Topcu, U.; Low, S.H. Optimal decentralized protocol for electric vehicle charging. IEEE Trans. Power Syst. 2013, 28, 940–951. [Google Scholar] [CrossRef]
- Hu, J.; Yang, G.; Bindner, H.W.; Xue, Y. Application of Network-Constrained Transactive Control to Electric Vehicle Charging for Secure Grid Operation. IEEE Trans. Sustain. Energy 2017, 8, 505–515. [Google Scholar] [CrossRef]
- Luo, X.; Xia, S.; Chan, K.W. A decentralized charging control strategy for plug-in electric vehicles to mitigate wind farm intermittency and enhance frequency regulation. J. Power Source. 2014, 248, 604–614. [Google Scholar] [CrossRef]
- Xi, X.; Sioshansi, R. Using Price-Based Signals to Control Plug-in Electric Vehicle Fleet Charging. IEEE Trans. Smart Grid 2014, 5, 1451–1464. [Google Scholar] [CrossRef]
- Ma, Z.; Callaway, D.; Hiskens, I. Decentralized charging control for large populations of plug-in electric vehicles. In Proceedings of the 2010 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 206–212. [Google Scholar]
- Mohsenian-Rad, A.H.; Wong, V.W.S.; Jatskevich, J.; Schober, R.; Leon-Garcia, A. Autonomous Demand-Side Management Based on Game-Theoretic Energy Consumption Scheduling for the Future Smart Grid. IEEE Trans. Smart Grid 2010, 1, 320–331. [Google Scholar] [CrossRef]
- Xu, N.Z.; Chung, C.Y. Challenges in Future Competition of Electric Vehicle Charging Management and Solutions. IEEE Trans. Smart Grid 2015, 6, 1323–1331. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Y. A Game-Theoretic Approach to Optimal Scheduling of Parking-Lot Electric Vehicle Charging. IEEE Trans. Veh. Technol. 2016, 65, 4068–4078. [Google Scholar] [CrossRef]
- Wei, W.; Liu, F.; Mei, S. Charging Strategies of EV Aggregator Under Renewable Generation and Congestion: A Normalized Nash Equilibrium Approach. IEEE Trans. Smart Grid 2016, 7, 1630–1641. [Google Scholar] [CrossRef]
- Zhu, Z.; Lambotharan, S.; Chin, W.H.; Fan, Z. A Mean Field Game Theoretic Approach to Electric Vehicles Charging. IEEE Access 2016, 4, 3501–3510. [Google Scholar] [CrossRef]
- Stüdli, S.; Crisostomi, E.; Middleton, R.; Shorten, R. A flexible distributed framework for realising electric and plug-in hybrid vehicle charging policies. Int. J. Control 2010, 85, 1130–1145. [Google Scholar] [CrossRef]
- De Hoog, J.; Thomas, D.A.; Muenzel, V.; Jayasuriya, D.C. Electric vehicle charging and grid constraints: Comparing distributed and centralized approaches. In Proceedings of the 2013 IEEE Power and Energy Society General Meeting (PES), Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Singh, M.; Kumar, P.; Kar, I. Implementation of Vehicle to Grid Infrastructure Using Fuzzy Logic Controller. IEEE Trans. Smart Grid 2010, 3, 565–577. [Google Scholar] [CrossRef]
- Singh, M.; Thirugnanam, K.; Kumar, P.; Kar, I. Real-Time Coordination of Electric Vehicles to Support the Grid at the Distribution Substation Level. IEEE Syst. J. 2015, 9, 1000–1010. [Google Scholar] [CrossRef]
- Liu, M.; McLoone, S. Enhanced AIMD-based decentralized residential charging of EVs. Trans. Inst. Meas. Control 2015, 37, 853–867. [Google Scholar] [CrossRef] [Green Version]
- Richardson, P.; Flynn, D.; Keane, A. Local Versus Centralized Charging Strategies for Electric Vehicles in Low Voltage Distribution Systems. IEEE Trans. Smart Grid 2012, 3, 1020–1028. [Google Scholar] [CrossRef]
- Tokudome, M.; Tanaka, K.; Senjyu, T.; Yona, A.; Funabashi, T.; Kim, C.H. Frequency and voltage control of small power systems by decentralized controllable loads. In Proceedings of the 2009 International Conference on Power Electronics and Drive Systems (PEDS), Taipei, Taiwan, 2–5 November 2009; pp. 666–671. [Google Scholar]
- Lopes, J.A.P.; Almeida, P.M.R.; Soares, F.J. Using vehicle-to-grid to maximize the integration of intermittent renewable energy resources in islanded electric grids. In Proceedings of the 2009 International Conference on Clean Electrical Power, Capri, Italy, 9–11 June 2009; pp. 290–295. [Google Scholar]
- Leemput, N.; Geth, F.; Roy, J.V.; Delnooz, A.; Büscher, J.; Driesen, J. Impact of Electric Vehicle On-Board Single-Phase Charging Strategies on a Flemish Residential Grid. IEEE Trans. Smart Grid 2014, 5, 1815–1822. [Google Scholar] [CrossRef]
- Gouveia, C.; Moreira, C.L.; Lopes, J.A.P.; Varajao, D.; Araujo, R.E. Microgrid Service Restoration: The Role of Plugged-in Electric Vehicles. IEEE Ind. Electron. Mag. 2013, 7, 26–41. [Google Scholar] [CrossRef]
- Ota, Y.; Taniguchi, H.; Nakajima, T.; Liyanage, K.M.; Baba, J.; Yokoyama, A. Autonomous Distributed V2G (Vehicle-to-Grid) Satisfying Scheduled Charging. IEEE Trans. Smart Grid 2012, 3, 559–564. [Google Scholar] [CrossRef]
- Xia, L.; Mareels, I.; Alpcan, T.; Brazil, M.; de Hoog, J.; Thomas, D.A. A distributed electric vehicle charging management algorithm using only local measurements. In Proceedings of the 2014 IEEE PES Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 19–22 February 2014; pp. 1–5. [Google Scholar]
- Al-Awami, A.T.; Sortomme, E. Electric vehicle charging modulation using voltage feedback control. In Proceedings of the 2013 IEEE Power and Energy Society General Meeting (PES), Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Communication Free Charging Management of Electric Vehicles under Grid Constraints—ProQuest. Available online: https://search.proquest.com/openview/7cf2d967afa5ec35ab0da7b243741b3a/1?pq-origsite=gscholar&cbl=2026366&diss=y (accessed on 9 February 2018).
- Al-Awami, A.T.; Sortomme, E.; Akhtar, G.M.A.; Faddel, S. A Voltage-Based Controller for an Electric-Vehicle Charger. IEEE Trans. Veh. Technol. 2016, 65, 4185–4196. [Google Scholar] [CrossRef]
- Faddel, S.; Al-Awami, A.T.; Abido, M.A. Real time digital simulation of voltage-based controller for electric vehicle charging. In Proceedings of the 2016 Clemson University Power Systems Conference (PSC), 8–11 March 2016; pp. 1–5. [Google Scholar]
- Faddel, S.; Mohamed, A.A.S.; Mohammed, O.A. Fuzzy logic-based autonomous controller for electric vehicles charging under different conditions in residential distribution systems. Electr. Power Syst. Res. 2017, 148, 48–58. [Google Scholar] [CrossRef]
- Saber, A.Y.; Venayagamoorthy, G.K. Resource Scheduling Under Uncertainty in a Smart Grid with Renewables and Plug-in Vehicles. IEEE Syst. J. 2012, 6, 103–109. [Google Scholar] [CrossRef]
- Vagropoulos, S.I.; Bakirtzis, A.G. Optimal Bidding Strategy for Electric Vehicle Aggregators in Electricity Markets. IEEE Trans. Power Syst. 2013, 28, 4031–4041. [Google Scholar] [CrossRef]
- Faddel, S.; Al-Awami, A.T.; Abido, M.A. Fuzzy Optimization for the Operation of Electric Vehicle Parking Lots. Electr. Power Syst. Res. 2017, 145, 166–174. [Google Scholar] [CrossRef]
- Su, W.; Chow, M.-Y. Performance Evaluation of an EDA-Based Large-Scale Plug-In Hybrid Electric Vehicle Charging Algorithm. IEEE Trans. Smart Grid 2012, 3, 308–315. [Google Scholar] [CrossRef]
- Jian, L.; Zheng, Y.; Xiao, X.; Chan, C.C. Optimal scheduling for vehicle-to-grid operation with stochastic connection of plug-in electric vehicles to smart grid. Appl. Energy 2015, 146, 150–161. [Google Scholar] [CrossRef]
- Bai, X.; Qiao, W. Robust Optimization for Bidirectional Dispatch Coordination of Large-Scale V2G. IEEE Trans. Smart Grid 2015, 6, 1944–1954. [Google Scholar] [CrossRef]
- Al-Awami, A.T.; Amleh, N.; Muqbel, A. Optimal Demand Response Bidding and Pricing Mechanism with Fuzzy Optimization: Application for a Virtual Power Plant. IEEE Trans. Ind. Appl. 2017, 53, 5051–5061. [Google Scholar] [CrossRef]
- Yang, Z.; Li, K.; Niu, Q.; Xue, Y. A comprehensive study of economic unit commitment of power systems integrating various renewable generations and plug-in electric vehicles. Energy Convers. Manag. 2017, 132, 460–481. [Google Scholar] [CrossRef]
- Al-Awami, A.T.; Sortomme, E. Coordinating Vehicle-to-Grid Services with Energy Trading. IEEE Trans. Smart Grid 2012, 3, 453–462. [Google Scholar] [CrossRef]
- He, L.; Yang, J.; Yan, J.; Tang, Y.; He, H. A bi-layer optimization based temporal and spatial scheduling for large-scale electric vehicles. Appl. Energy 2016, 168, 179–192. [Google Scholar] [CrossRef]
- Cai, Q.; Wen, F.; Xue, Y.; Xin, J. An SCUC-based optimization approach for power system dispatching with plug-in hybrid electric vehicles. Dianli Xitong ZidonghuaAutomation Electr. Power Syst. 2012, 36, 38–46. [Google Scholar]
- Ortega-Vazquez, M.A. Optimal scheduling of electric vehicle charging and vehicle-to-grid services at household level including battery degradation and price uncertainty. IET Gener. Transm. Distrib. 2014, 8, 1007–1016. [Google Scholar] [CrossRef]
- Qi, W.; Xu, Z.; Shen, Z.-M.; Hu, Z.; Song, Y. Hierarchical Coordinated Control of Plug-in Electric Vehicles Charging in Multifamily Dwellings. IEEE Trans. Smart Grid 2014, 5, 1465–1474. [Google Scholar] [CrossRef]
- Kuran, M.S.; Viana, A.C.; Iannone, L.; Kofman, D.; Mermoud, G.; Vasseur, J.P. A Smart Parking Lot Management System for Scheduling the Recharging of Electric Vehicles. IEEE Trans. Smart Grid 2015, 6, 2942–2953. [Google Scholar] [CrossRef]
- Neyestani, N.; Damavandi, M.Y.; Shafie-khah, M.; Catalao, J.P.; Contreras, J. Modeling the optimal behavior of PEV parking lots in energy and reserve market. In Proceedings of the 2014 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Istanbul, Turkey, 12–15 October 2014; pp. 1–6. [Google Scholar]
- AeroVirnonment EV Solutions. Available online: https://www.evsolutions.com/ (accessed on 22 October 2017).
- Soares, F.J.; Almeida, P.M.R.; Lopes, J.A.P. Quasi-real-time management of Electric Vehicles charging. Electr. Power Syst. Res. 2014, 108, 293–303. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, J.; Poor, H.V. Risk-Aware Day-Ahead Scheduling and Real-time Dispatch for Electric Vehicle Charging. IEEE Trans. Smart Grid 2014, 5, 693–702. [Google Scholar] [CrossRef]
- Huang, Y.; Guo, C.; Ding, Y.; Wang, L.; Zhu, B.; Xu, L. A Multi-Period Framework for Coordinated Dispatch of Plug-in Electric Vehicles. Energies 2016, 9, 370. [Google Scholar] [CrossRef]
- He, L.; Li, C.; Cao, Y.; Yu, Z.; Fang, B. Synergistic and priority control for electric vehicles power allocation in participating in AGC. In Proceedings of the 2013 Chinese Automation Congress, Changsha, China, 7–8 November 2013; pp. 81–86. [Google Scholar]
- Vagropoulos, S.I.; Kyriazidis, D.K.; Bakirtzis, A.G. Real-Time Charging Management Framework for Electric Vehicle Aggregators in a Market Environment. IEEE Trans. Smart Grid 2016, 7, 948–957. [Google Scholar] [CrossRef]
- Wang, R.; Li, Y.; Wang, P.; Niyato, D. Design of a V2G aggregator to optimize PHEV charging and frequency regulation control. In Proceedings of the 2013 IEEE International Conference on Smart Grid Communications (SmartGridComm), Vancouver, BC, Canada, 21–24 October 2013; pp. 127–132. [Google Scholar]
- Wang, R.; Wang, P.; Xiao, G. Two-Stage Mechanism for Massive Electric Vehicle Charging Involving Renewable Energy. IEEE Trans. Veh. Technol. 2016, 65, 4159–4171. [Google Scholar] [CrossRef]
- Esfahani, M.M.; Yousefi, G.R. Real Time Congestion Management in Power Systems Considering Quasi-Dynamic Thermal Rating and Congestion Clearing Time. IEEE Trans. Ind. Inform. 2016, 12, 745–754. [Google Scholar] [CrossRef]
- Esfahani, M.M.; Sheikh, A.; Mohammed, O. Adaptive real-time congestion management in smart power systems using a real-time hybrid optimization algorithm. Electr. Power Syst. Res. 2017, 150, 118–128. [Google Scholar] [CrossRef]
- Chiu, W.Y.; Sun, H.; Thompson, J.; Nakayama, K.; Zhang, S. IoT and Information Processing in Smart Energy Applications. IEEE Commun. Mag. 2017, 55, 44. [Google Scholar] [CrossRef]
- ITU Internet Reports 2005: The Internet of Things. Available online: https://www.itu.int/osg/spu/publications/internetofthings/ (accessed on 14 February 2018).
- Borgia, E. The Internet of Things vision: Key features, applications and open issues. Comput. Commun. 2014, 54, 1–31. [Google Scholar] [CrossRef]
- Chen, S.; Xu, H.; Liu, D.; Hu, B.; Wang, H. A Vision of IoT: Applications, Challenges, and Opportunities with China Perspective. IEEE Internet Things J. 2014, 1, 349–359. [Google Scholar] [CrossRef]
- Yao, L.; Chen, Y.Q.; Lim, W.H. Internet of Things for Electric Vehicle: An Improved Decentralized Charging Scheme. In Proceedings of the 2015 IEEE International Conference on Data Science and Data Intensive Systems, Sydney, Australia, 11–13 December 2015; pp. 651–658. [Google Scholar]
- Monteiro, V.; Ferreira, J.C.; Afonso, J.L. Smart Platform towards Batteries Analysis Based on Internet-of-Things. Procedia Technol. 2014, 17, 520–527. [Google Scholar] [CrossRef] [Green Version]
- Chekired, D.A.; Khoukhi, L. Smart Grid Solution for Charging and Discharging Services Based on Cloud Computing Scheduling. IEEE Trans. Ind. Inform. 2017, 13, 3312–3321. [Google Scholar] [CrossRef]
- Tao, M.; Ota, K.; Dong, M. Foud: Integrating Fog and Cloud for 5G-Enabled V2G Networks. IEEE Netw. 2017, 31, 8–13. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, H.; Zhang, N.; Xu, W.; Yu, Q.; Gui, L.; Shen, X. Service-Oriented Dynamic Connection Management for Software-Defined Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2826–2837. [Google Scholar] [CrossRef]
- Singh, V.P.; Kishor, N.; Samuel, P. Load Frequency Control with Communication Topology Changes in Smart Grid. IEEE Trans. Ind. Inform. 2016, 12, 1943–1952. [Google Scholar] [CrossRef]
- Bose, A. Smart Transmission Grid Applications and Their Supporting Infrastructure. IEEE Trans. Smart Grid 2010, 1, 11–19. [Google Scholar] [CrossRef]
- Nguyen, C.P.; Flueck, A.J. Modeling of communication latency in smart grid. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–7. [Google Scholar]
- Kansal, P.; Bose, A. Bandwidth and Latency Requirements for Smart Transmission Grid Applications. IEEE Trans. Smart Grid 2012, 3, 1344–1352. [Google Scholar] [CrossRef]
- Sönmez, Ş.; Ayasun, S.; Nwankpa, C.O. An Exact Method for Computing Delay Margin for Stability of Load Frequency Control Systems with Constant Communication Delays. IEEE Trans. Power Syst. 2016, 31, 370–377. [Google Scholar] [CrossRef]
- Binetti, G.; Davoudi, A.; Naso, D.; Turchiano, B.; Lewis, F.L. Scalable Real-Time Electric Vehicles Charging With Discrete Charging Rates. IEEE Trans. Smart Grid 2015, 6, 211–2220. [Google Scholar] [CrossRef]
- Rezaei, P.; Frolik, J.; Hines, P.D.H. Packetized Plug-In Electric Vehicle Charge Management. IEEE Trans. Smart Grid 2014, 5, 642–650. [Google Scholar] [CrossRef]
- Sortomme, E.; Cheung, K.W. Intelligent dispatch of Electric Vehicles performing vehicle-to-grid regulation. In Proceedings of the 2012 IEEE International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012; pp. 1–6. [Google Scholar]
Figure 1.
Evolution of battery energy density and cost.

Figure 2.
Evolution of the global electric car stock, 2010-16.

Figure 3.
Likelihood of the use of charging infrastructure.

Figure 4.
Centralized Controller schematic.

Figure 5.
Decentralized Controller schematic.

Figure 6.
Autonomous Droop Controller (POC: point of charging).

Figure 7.
Timeline of the day-ahead and real-time markets.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Commercial EV examples.
| Model | Type | Capacity (kWh) | Charging Rate (kW) | Electric Range (miles) | Price ($) |
|---|---|---|---|---|---|
| Nissan Leaf | BEV | 30 | 6.6 | 107 | $29,000 |
| Tesla model S | BEV | 100 | 10 | 315 | $71,000 |
| Chevrolet Bolt | BEV | 60 | 7.2 | 238 | $37,500 |
| Toyota Prius | PHEV | 9 | 3.3 | 25 | $28,000 |
| Ford Fusion Energy | PHEV | 7 | 3.3 | 19 | $33,900 |
Table 2.
Charging stations characteristics.
| Charging Level | Vehicle Range Added per Charging Time and Power | Supply Power | Unit Cost Range Per (Single Port) |
|---|---|---|---|
| AC Level 1 | 4 miles/h @ 1.4 kW | 120 V/20 A (14–16 A continuous) | $300–$1500 |
| 6 miles/h @ 1.9 kW | |||
| AC Level 2 | 10 miles/h @ 3.4 kW | (208/240) VAC (16–80 A continuous) | $400–$6500 |
| 20 miles/h @ 6.6 kW | |||
| 60 miles/h @ 19.2 kW | |||
| DC Fast Charging | 24 miles/h @ 24 kW | (208/240) VAC 3-phase ~(20–400 A AC) | $10,000–$40,000 |
| 50 miles/h @ 50 kW | |||
| 90 miles/h @ 90 kW |
Table 3.
Summary of the discussed control techniques.
| Ref. Number | Technique Used | Bidirectional Battery Flow | Utility Constraints Consideration |
|---|---|---|---|
| Centralized Techniques | |||
| [22] | Rolling Scheduling Using Linear Programming | ✓ | ✓ |
| [23] | Tie-Line Bias Control | ✓ | ✗ |
| [24] | Tie-Line Bias Control | ✓ | ✗ |
| [25] | Linear Programming | ✓ | ✗ |
| [30] | Multi-Objective Optimization Using Particle Swarm | ✗ | ✗ |
| [31] | Non-Linear Programming Using GAMS | ✗ | ✓ |
| [32] | Linear Programming | ✗ | ✗ |
| [33] | Quadratic Optimization | ✗ | ✗ |
| [34] | Linear Programming | ✗ | ✓ |
| [35] | Additive Increase, Multiplicative Decrease Algorithm | ✗ | ✓ |
| [37] | Fuzzy Control | ✗ | ✗ |
| [38] | Linear Programming | ✗ | ✓ |
| [39] | Receding Horizon Using Linear Programming | ✗ | ✓ |
| Decentralized Techniques | |||
| [4] | Gradient Optimization | ✗ | ✓ |
| [40] | Fuzzy Control | ✓ | ✓ |
| [41] | Artificail Neural Networks- Wavelet Transform | ✓ | ✗ |
| [42] | Hybrid-PSO& Linear Programming | ✗ | ✗ |
| [44] | Linear Programming | ✗ | ✗ |
| [45] | Linear Programming | ✗ | ✓ |
| [46] | Congestion Pricing Algorithm | ✓ | ✓ |
| [47] | Game Theory | ✗ | ✗ |
| [48] | Non-Cooperative Game Theory | ✗ | ✗ |
| [49] | Game Theory | ✗ | ✗ |
| [50] | Game Theory | ✗ | ✗ |
| [51] | Non-Cooperative Game Theory | ✗ | ✗ |
| [52] | Normalized Nash Game | ✗ | ✗ |
| [53] | Stochastic Mean Field Game Theory | ✗ | ✗ |
| [54] | Additive Increase, Multiplicative Decrease Algorithm | ✗ | ✗ |
| [55] | Probability Theory | ✗ | ✓ |
| [56] | Fuzzy Control | ✓ | ✓ |
| [57] | Fuzzy Control | ✓ | ✓ |
| [58] | Additive Increase, Multiplicative Decrease Algorithm | ✗ | ✓ |
| Autonomous Techniques | |||
| [59] | Linear Programming | ✗ | ✓ |
| [60] | Droop Controller | ✓ | ✓ |
| [61] | Droop Controller | ✓ | ✓ |
| [62] | Droop Controller | ✗ | ✓ |
| [63] | Droop Controller | ✓ | ✓ |
| [64] | Droop Controller | ✓ | ✓ |
| [65] | If-Then Rules | ✗ | ✓ |
| [66] | Proportional Controlller | ✗ | ✓ |
| [67] | Droop Controller | ✗ | ✓ |
| [68] | Exponential Controller | ✗ | ✓ |
| [69] | Exponential Controller | ✗ | ✓ |
| [70] | Fuzzy Controller | ✗ | ✓ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Faddel, S.; Al-Awami, A.T.; Mohammed, O.A. Charge Control and Operation of Electric Vehicles in Power Grids: A Review. Energies 2018, 11, 701. https://doi.org/10.3390/en11040701
AMA Style
Faddel S, Al-Awami AT, Mohammed OA. Charge Control and Operation of Electric Vehicles in Power Grids: A Review. Energies. 2018; 11(4):701. https://doi.org/10.3390/en11040701
Chicago/Turabian StyleFaddel, Samy, Ali T. Al-Awami, and Osama A. Mohammed. 2018. "Charge Control and Operation of Electric Vehicles in Power Grids: A Review" Energies 11, no. 4: 701. https://doi.org/10.3390/en11040701
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.