Damping Optimum-Based Design of Control Strategy Suitable for Battery/Ultracapacitor Electric Vehicles

 ,
,
Abstract
:1. Introduction
- (1)
- Top-down cascade control system structure, to facilitate direct saturation of current demands via power converter references [39];
- (2)
- Bottom-up control system design wherein the current control systems for the battery and ultracapacitor ESS are designed and tested first, which is then followed by the comprehensive design of the superimposed feedback control levels [40];
- (3)
- (4)
- (5)
- Use of control system design methodology which could facilitate straightforward tuning of the closed-loop control system response dynamics;
- (6)
- Simplicity of code implementation that would enable use on robust microcontroller platforms suitable for automotive applications.
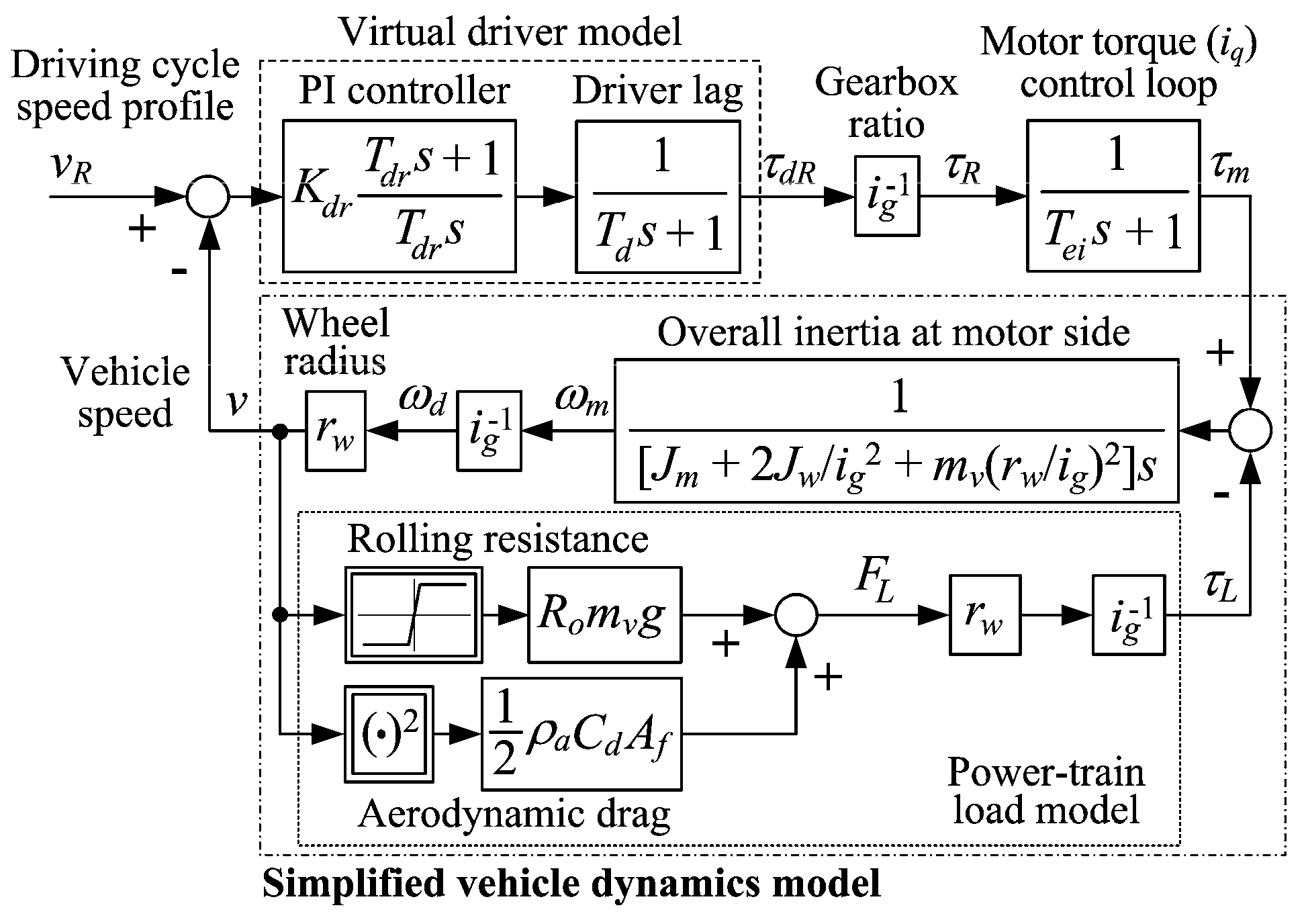
2. EV Power-Train Model
2.1. Fully Electric Power-Train Topology
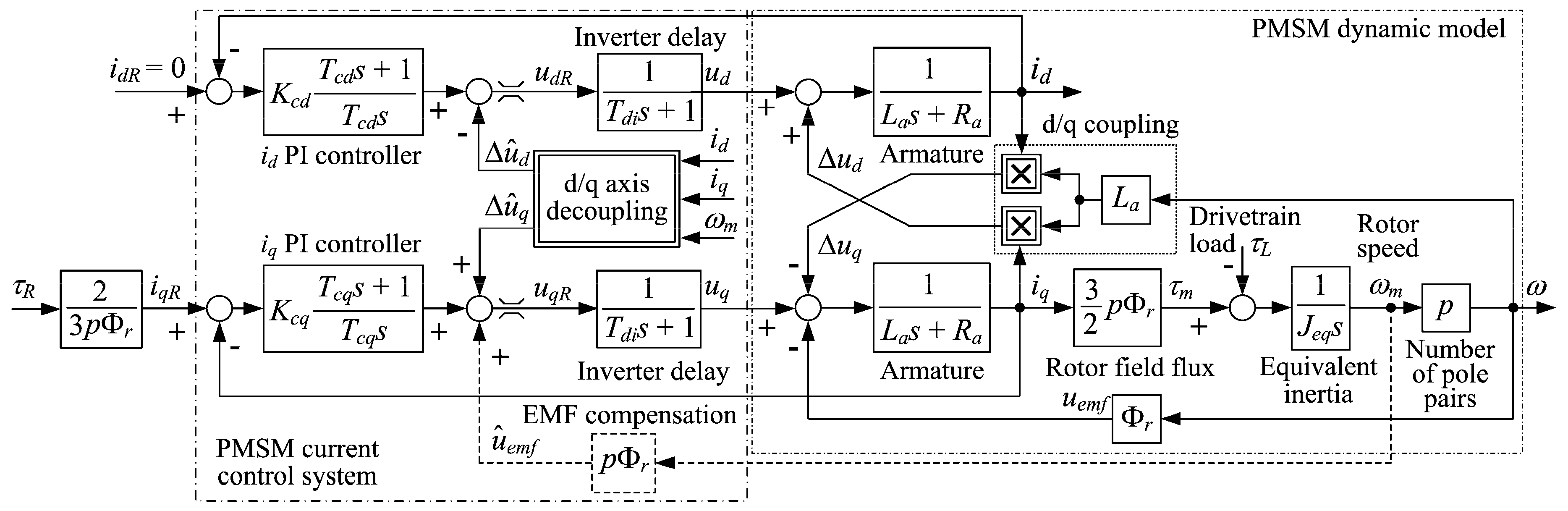
2.2. Traction Motor Control System
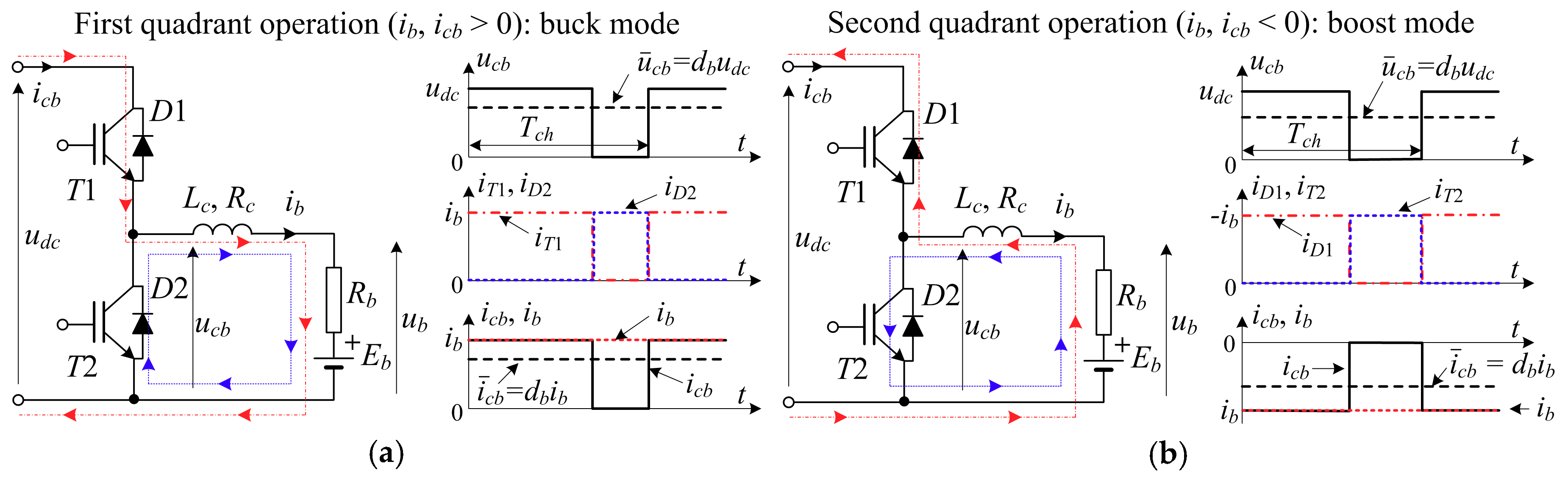
2.3. Dynamic Model of DC Bus
2.4. ESS Models
3. Control System Design
3.1. Damping Optimum Criterion
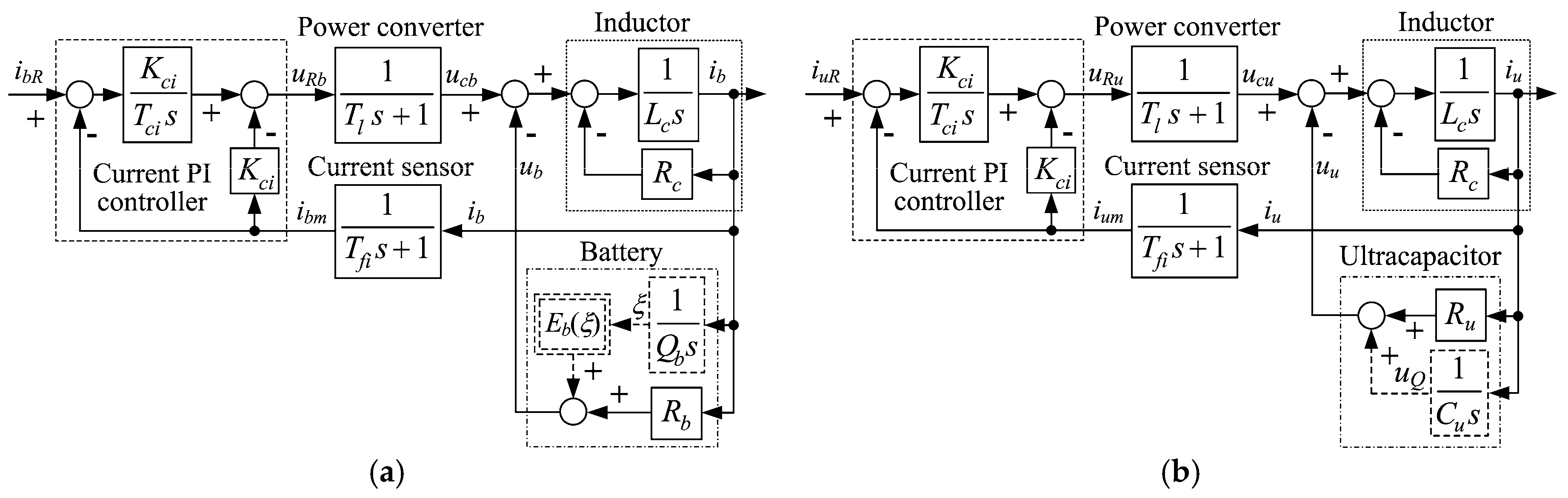
3.2. Low-Level Control of ESSs
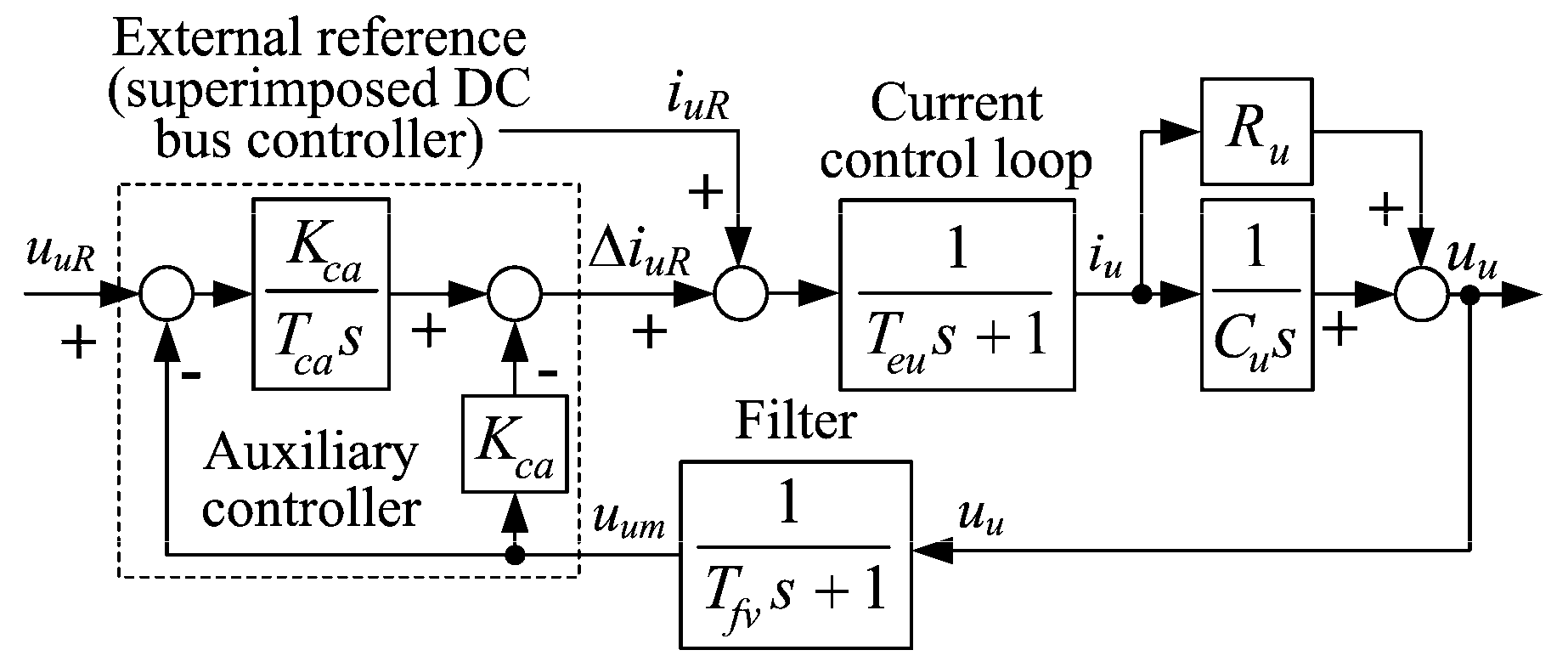
3.3. Design of DC Bus Voltage Control System
3.4. Traction Motor Current/Torque Control
4. Results of Simulation Analysis
4.1. Simulation Model Parameterization
4.2. Verification of HESS and DC Bus Control System
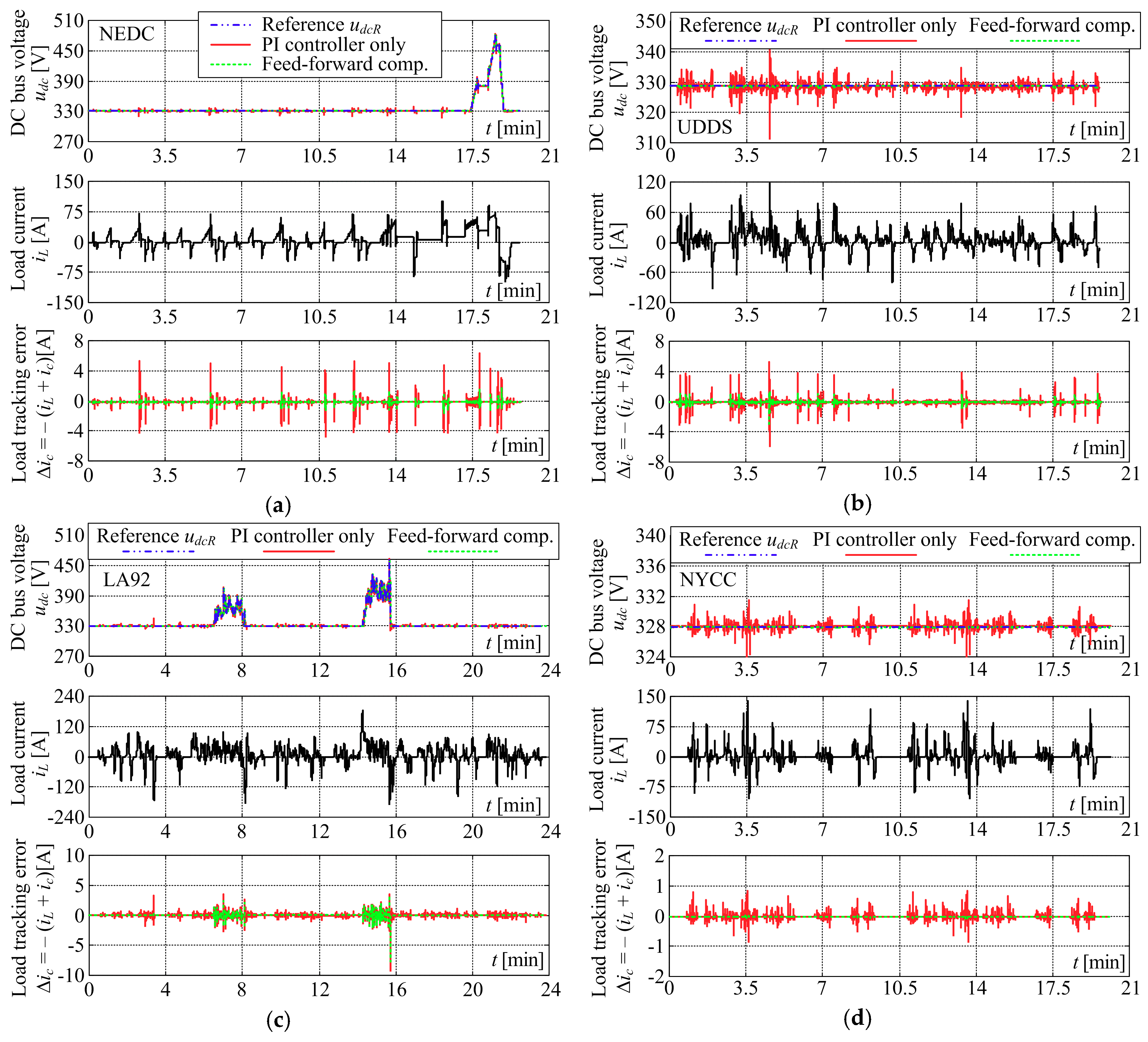
4.3. Driving Cycle-Based Analysis
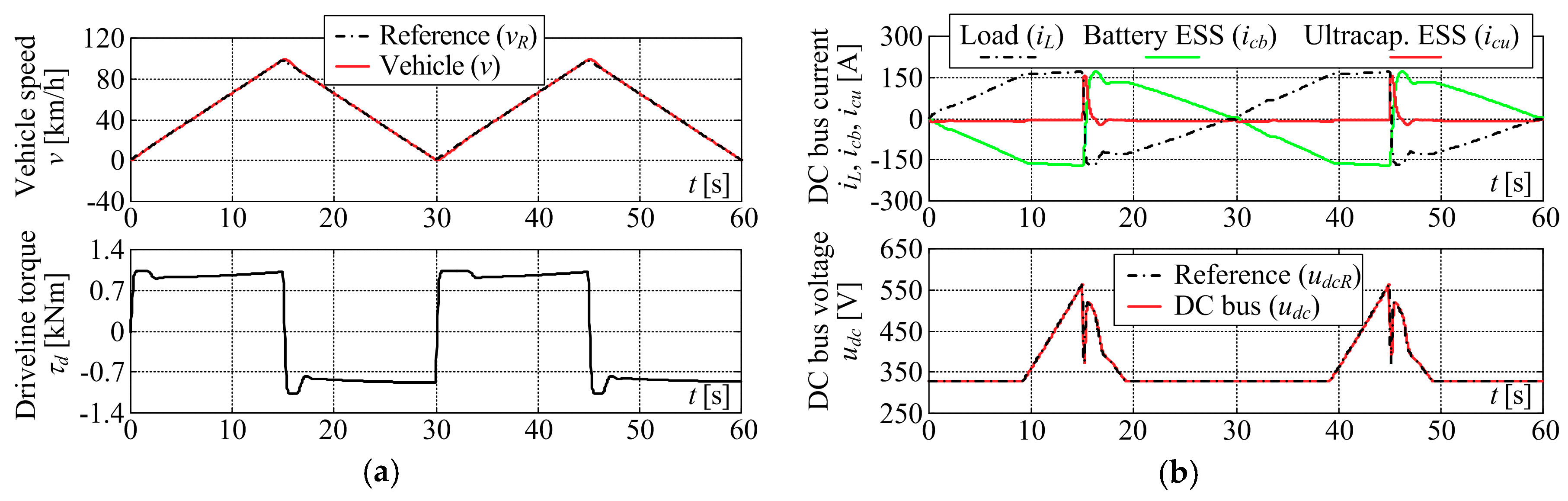
4.4. Analysis for EV Constant Acceleration/Deceleration Regime
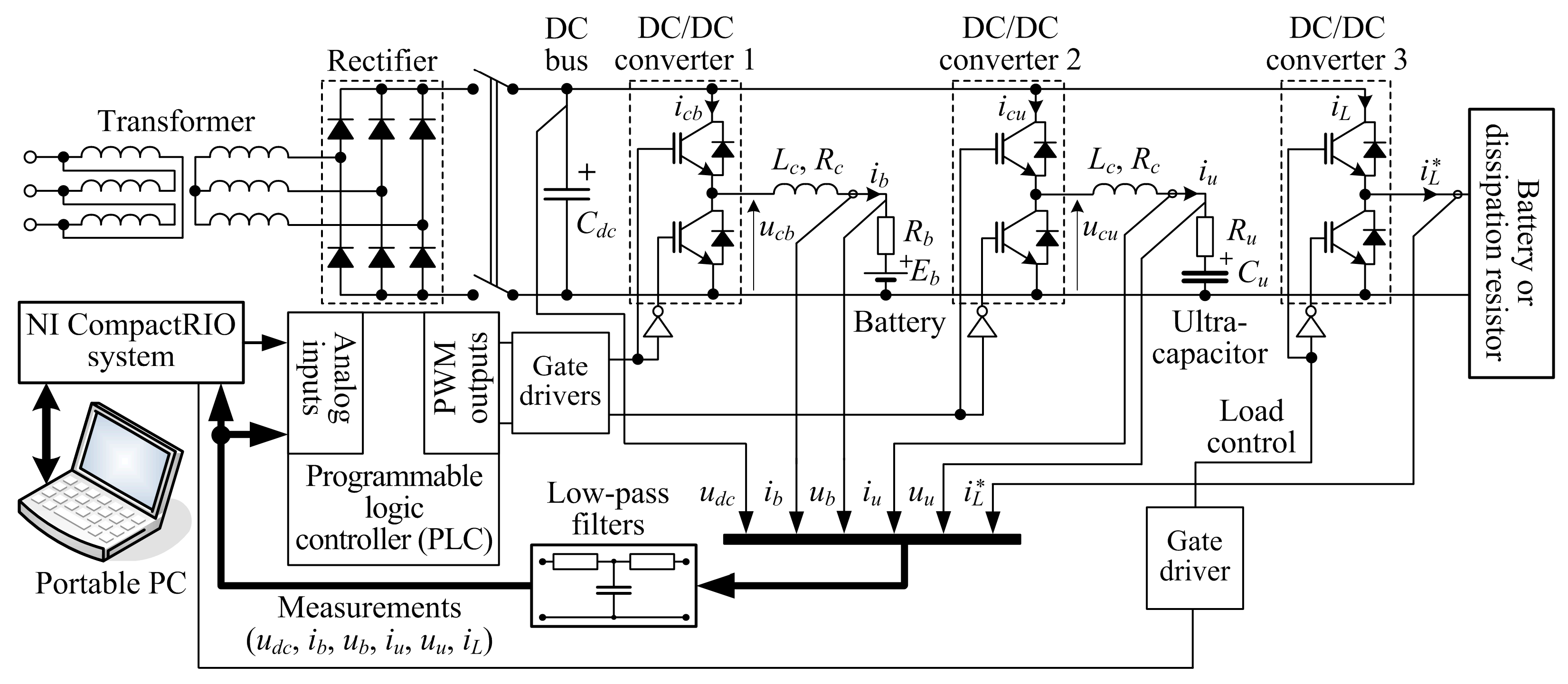
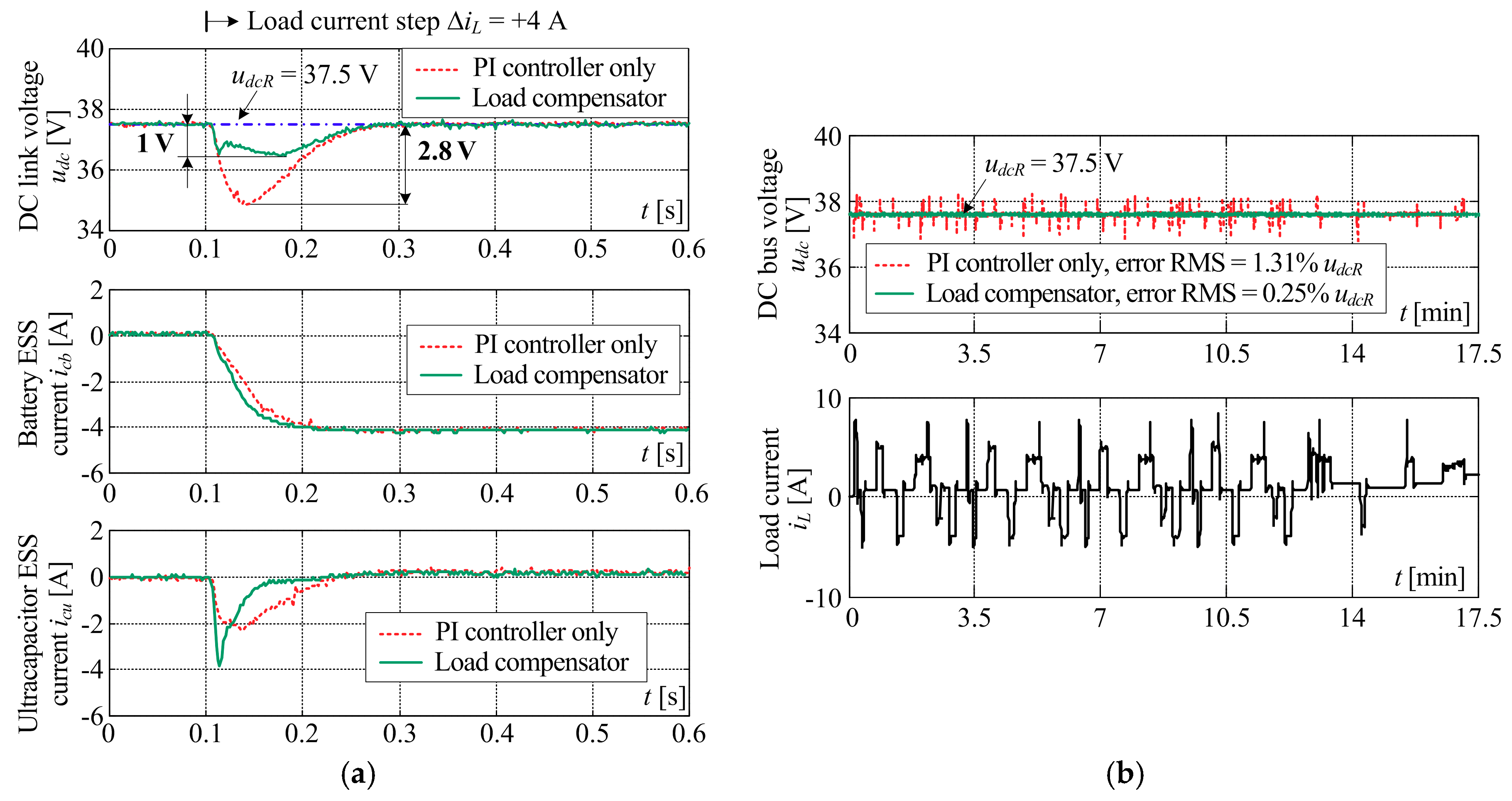
5. Results of Experimental Verification
6. Discussion and Concluding Remarks
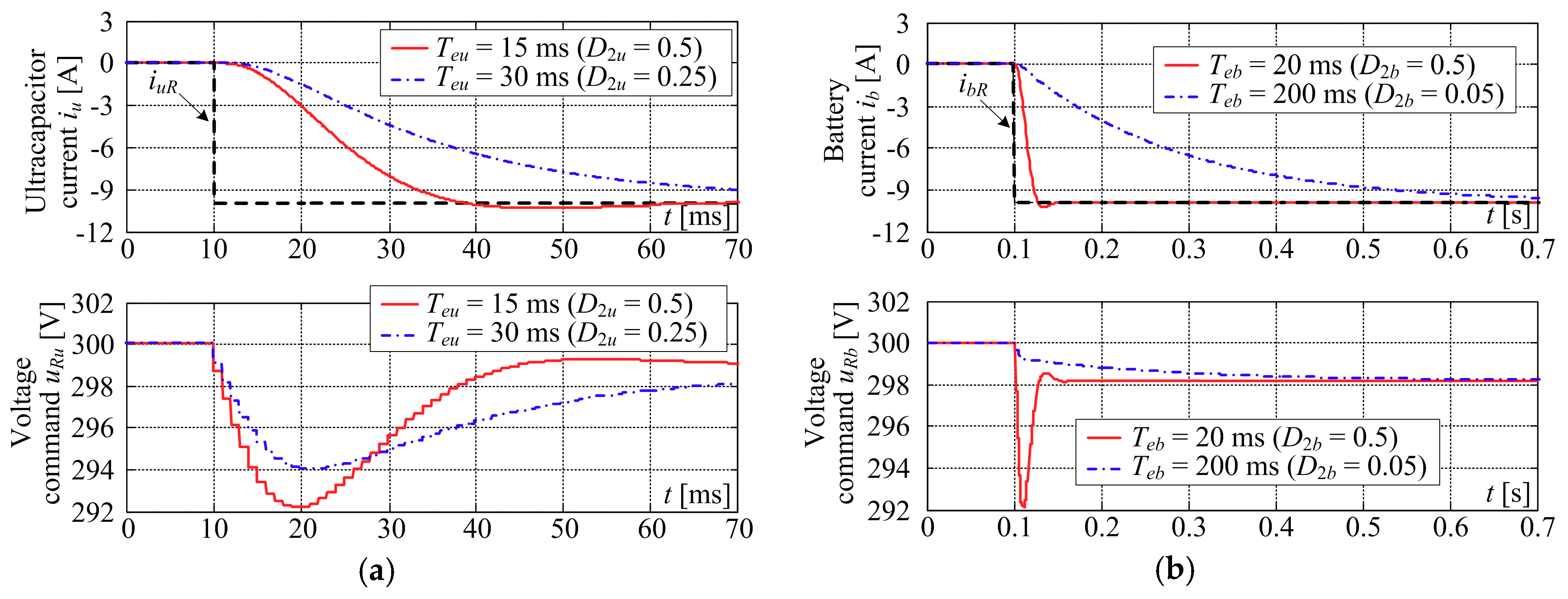
- Damping optimum tuning approach having been able to ensure well-damped closed-loop behavior of designed feedback systems (i.e., less than 6% step response overshoot). It has also been able to precisely adjust the closed-loop response speed of battery/ultracapacitor HESS inner current control loops via the choice of the closed-loop equivalent time constant. This has enabled rather fast-current reference tracking of the ultracapacitor ESS (30 ms step response settling time has been obtained), while also achieving notably slower battery ESS response (characterized by 400 ms response time) within the DC bus control system.
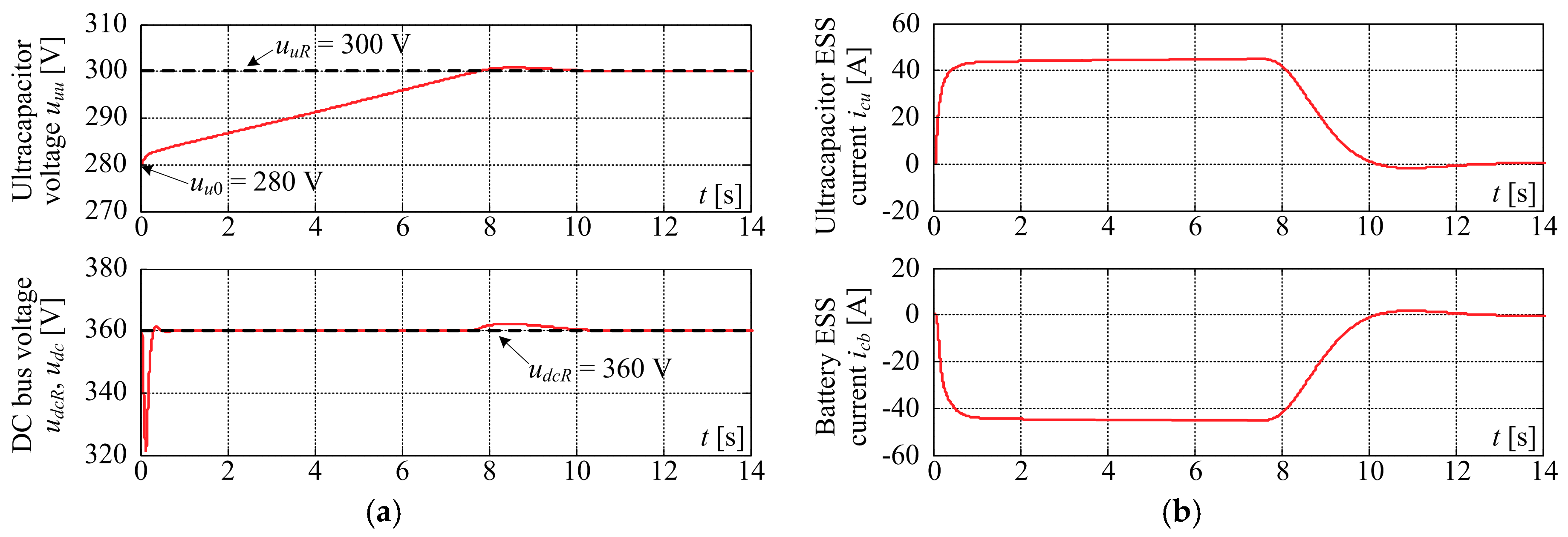
- The load suppression ability of the overall DC bus control system having been notably improved by the introduction of the direct load compensator, which has typically resulted in three to five times smaller DC bus voltage excursion after an abrupt DC bus load. In particular, for the realistic scenario of 25% stepwise change of EV driveline load, DC voltage excursion is reduced from 8.9% of the target DC bus voltage value in the case of PI feedback controller to 1.7% in the case when PI controller has been augmented by the load compensator based on DC bus load reconstruction from traction motor variables.
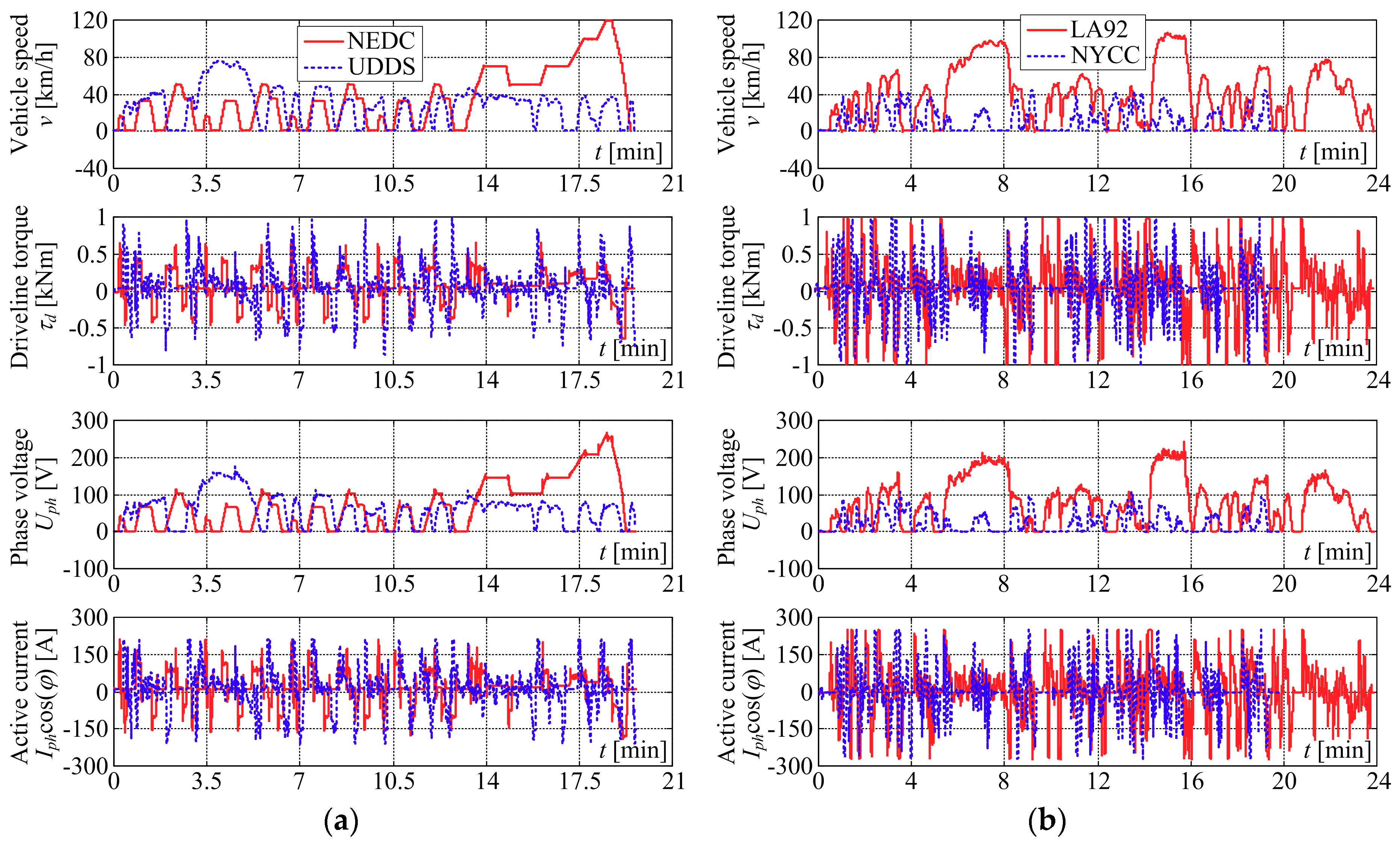
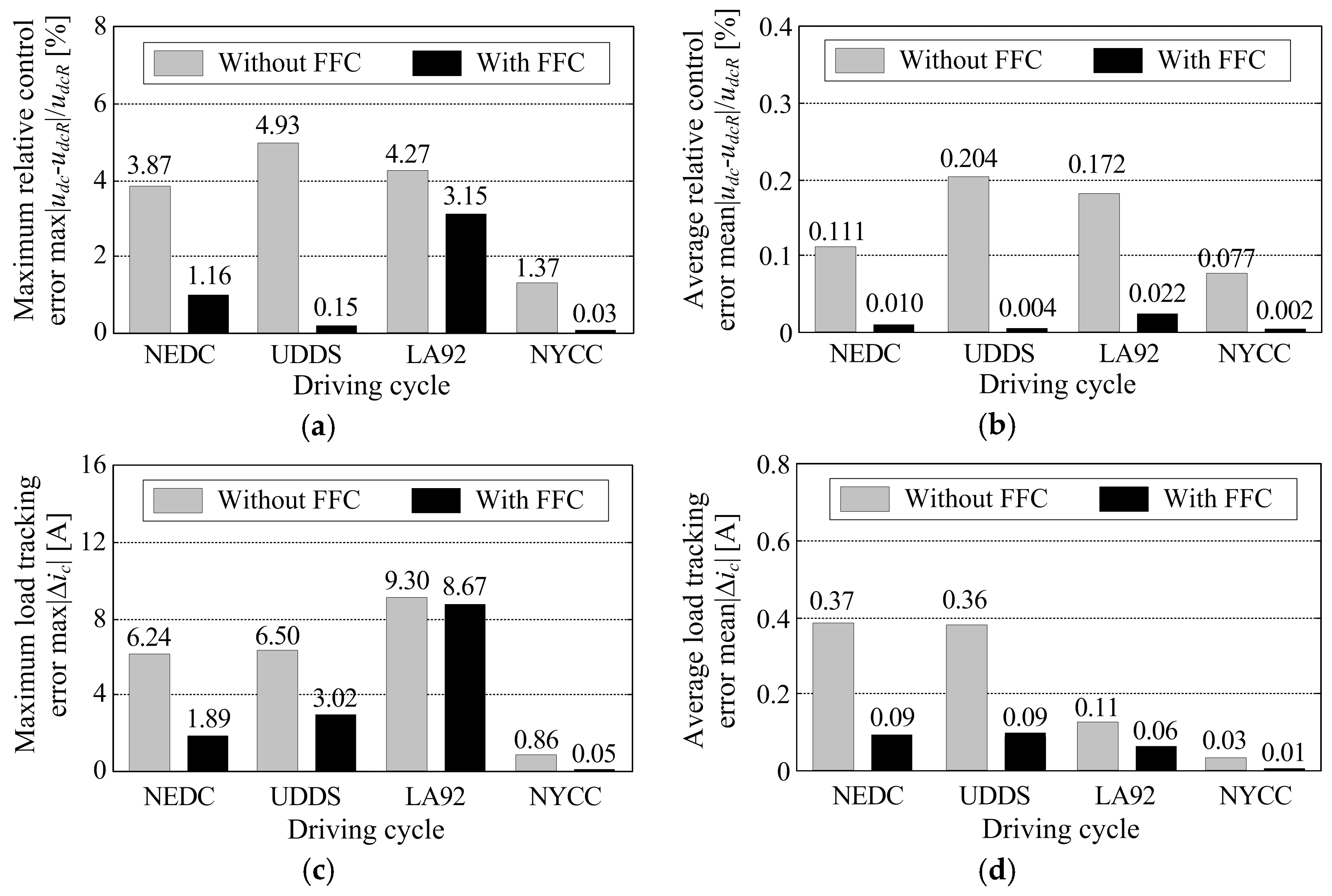
- The DC bus voltage target tracking performance having benefited from the inclusion of direct feed-forward load compensator for different certification driving cycles and corresponding DC bus voltage profiles calculated from traction motor variables. Namely, use of direct feed-forward load compensator has resulted in the reduction of the maximum DC bus voltage tracking error from 3.87% to 1.16% of the DC voltage target in the case of NEDC driving cycle, and from 4.93% to just 0.15% in the case of UDDS scenario. Similar reduction has also been observed for NYCC driving scenario (i.e., from 1.37% to just 0.03% has been obtained), whereas LA92 driving cycle has been characterized by the DC bus excursion reduction from 4.27% to 3.15%. Generally speaking, the DC bus voltage average tracking error has been reduced between one and two orders of magnitude for all driving cycles when load compensator has been used.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations | |
| AC | Alternating current |
| d-q | Field-torque rotating reference frame |
| DC | Direct current |
| DC/DC | DC-to-DC (power conversion) |
| EMF | Electromotive force |
| ESS | Energy storage system |
| EV | Electric vehicle |
| HESS | Hybrid energy storage system |
| LA92 | California Unified Cycle |
| NEDC | New European Driving Cycle |
| NYCC | New York Certification Cycle |
| PI | Proportional-integral |
| PWM | Pulse-width Modulation |
| RMS | Root mean squared (error) |
| UDDS | Urban Driving Dynamometer Schedule |
| Greek Symbols | |
| α | Filtering time constant scaling factor |
| κu | DC bus voltage target scaling factor |
| ρa | Density of air |
| Φr | Rotor permanent-magnet field flux |
| Ωbw | Closed-loop bandwidth |
| Δic | DC bus load tracking error |
| ΔiUr | Ultracapacitor ESS auxiliary controller output |
| Δud, Δuq | d-q frame cross-axis coupling terms |
| ϕ | Stator current vs. voltage phase angle |
| θ | Rotor electrical angle |
| τR | Traction motor torque reference |
| ω | Rotor electrical speed |
| ωm, τm | Traction motor speed and torque |
| ωd, τd | Driveline speed and torque |
| ξ | Battery state of charge |
| Subscripts | |
| 1,2,3 | PMSM stator quantity |
| a | Auxiliary control loop |
| b | Battery control loop quantity |
| dr | Virtual driver |
| D1, D2 | Quantity of fly-wheeling diode within DC/DC power converter |
| di | Lag (of motor inverter voltage) |
| e | Equivalent (time constant) |
| i | PMSM current control loop |
| l | Lag (of power converter voltage) |
| u | Ultracapacitor ESS quantity |
| v | Voltage control loop |
| L | Load |
| ph | Phase quantity |
| r | PMSM rotor (field flux) |
| R | Reference (target) value |
| T1, T2 | Quantity of semiconductor-controlled switch within DC/DC power converter |
| ∑ | Lumped quantity |
| Superscripts | |
| Estimated value of x | |
| Average value of x | |
| Variables | |
| cosϕ | Motor power factor |
| db, du | Battery and ultracapacitor ESS DC/DC power converter PWM duty cycles |
| Eb | Battery electromotive force |
| ib, iu | Battery and ultracapacitor currents |
| ic | DC bus input current |
| icb, icu | Battery/ultracapacitor ESS input currents |
| id, iq | Direct (field) and quadrature (torque) currents in the d-q rotating reference frame |
| idR, iqR | Field and torque current references |
| iL | DC bus load current |
| Iph | Stator phase current amplitude |
| u1,2,3(R) | PMSM stator voltages (references) |
| ucb, ucu | Battery and ultracapacitor ESS DC/DC power converter output voltage |
| udR, uqR | Direct and quadrature axis voltage components |
| udR, uqR | Direct and quadrature axis voltage references from PI current controllers |
| uuR | Ultracapacitor ESS voltage reference |
| udc | DC bus voltage |
| uemf | AC machine electromotive force |
| Uph | Stator phase voltage amplitude |
| v | Vehicle longitudinal speed |
| Parameters | |
| Cd | Air drag coefficient |
| Cdc | DC link capacitance |
| Cu | Ultracapacitor capacitance |
| D2, …, Dn | Damping optimum characteristic ratios |
| g | Free fall (gravity) acceleration |
| ig | Gearbox transmission ratio |
| Jm, Jw | Motor and wheel inertia, respectively |
| Jeq | Equivalent inertia at PMSM rotor side |
| kE, kT | PMSM electromotive force and torque constants, respectively |
| Kca, Tca | Auxiliary ultracapacitor ESS state-of-charge controller gain and integral time constant |
| Kcd, Kcq | PMSM current controller proportional gains |
| Kci, Tci | Battery and ultracapacitor ESS current controller gain and integral time constant |
| Kdc, Tdc | DC bus controller proportional gain and integral time constant |
| Kdr, Tdr | Virtual driver proportional gain and integral time constant |
| La, Ra | PMSM armature inductance and resistance |
| Lc, Rc | Inductor inductance and resistance |
| Rtot | Overall series resistance |
| mv | Vehicle mass |
| Mmax | Maximum value of modulation index |
| p | PMSM number of pole pairs |
| rw | Wheel radius |
| Ro | Rolling resistance coefficient |
| Ta | PMSM armature time constant |
| Tl, Tdi | Voltage response delay of DC/DC power converter and motor inverter |
| Te | Closed-loop equivalent time constant |
| Tea | Equivalent time constant of the auxiliary ultracapacitor state-of-charge control loop |
| Tei | Equivalent time constant of the PMSM current control loop |
| Tcd, Tcq | PMSM current controller integral time constants |
| Teb, Teu | Equivalent time constants of battery and ultracapacitor current control loops |
| Tfi, Tfv | Current and voltage measurement (filter) time constants |
| Tf, TFF | Feed-forward load compensator lag time constant and lead time constant |
| T∑ | Parasitic time constant of the voltage control loop |
| T∑i | Parasitic time constant of the current control loop |
| T∑u | Parasitic time constant of the auxiliary state-of-charge control loop |
| Umin | DC bus voltage lower bound |
| Umax | DC bus voltage upper bound |
References
- Saber, A.Y.; Venayagamoorthy, G.K. Plug-in vehicles and renewable energy sources for cost and emission reductions. IEEE Trans. Ind. Electron. 2011, 58, 1229–1238. [Google Scholar] [CrossRef]
- Hansen, J.; Sato, M.; Kharecha, P.; Beerling, D.; Berner, R.; Masson-Delmotte, V.; Pagani, M.; Raymo, M.; Royer, D.L.; Zachos, J. Target atmospheric CO2: Where should humanity aim? Open Atmos. Sci. J. 2008, 2, 217–231. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandramurty, V.K.; Tan, K.M.; Mithulananthan, N. A review of the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Barth, M.; Todd, M. Intelligent transportation system architecture for a multi-station shared vehicle system. In Proceedings of the 2000 IEEE Intelligent Transportation Systems Conference, Dearborn, MI, USA, 1–3 October 2000; pp. 240–245. [Google Scholar] [CrossRef]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Nurunnabi Mollah, M.; Hossain, E. A comprehensive study of key electric vehicle (ev) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Burke, A.; Miller, M.; Zhao, H. Lithium batteries and ultracapacitors alone and in combination in hybrid vehicles: Fuel economy and battery stress reduction advantages. In Proceedings of the 25th World Battery, Hybrid, and Fuel Cell Electric Vehicle Symposium and Exhibition (EVS-25), Shenzhen, China, 5–9 November 2010. [Google Scholar]
- Kupperman, A.; Aharon, I. Battery-ultracapacitor hybrids for pulsed current loads: A review. Renew. Sustain. Energy Rev. 2011, 15, 981–992. [Google Scholar] [CrossRef]
- International Renewable Energy Agency (IRENA). Road Transport: The Cost of Renewable Solutions. 2013. Available online: http://www.irena.org/Publications/2013/Jul/Road-Transport-the-Cost-of-Renewable-Solutions (accessed on 15 October 2018).
- De Castro, R.; Araújo, R.E.; Trovão, J.P.F.; Pereirinha, P.G.; Melo, P. Robust DC-link control in EVS with multiple energy storage systems. IEEE Trans. Veh. Technol. 2012, 61, 3553–3565. [Google Scholar] [CrossRef]
- Amjadi, Z.; Williamson, S.S. Power-electronics-based solutions for plug-in hybrid electric vehicle energy storage and management systems. IEEE Trans. Ind. Electr. 2010, 57, 608–616. [Google Scholar] [CrossRef]
- Cao, J.; Emadi, A. A new battery/ultracapacitor hybrid energy storage system for electric, hybrid and plug-in hybrid electric vehicles. IEEE Trans. Power Electr. 2012, 27, 122–132. [Google Scholar] [CrossRef]
- Laldin, O.; Moshirvaziri, M.; Trescases, O. Predictive algorithm for optimizing power flow in hybrid ultracapacitor/battery storage systems for light electric vehicles. IEEE Trans. Power Electr. 2013, 28, 3882–3895. [Google Scholar] [CrossRef]
- Omar, N.; Monem, M.A.; Firouz, Y.; Salmien, J.; Smekens, J.; Hagazy, O.; Gaulous, H.; Mulder, G.; Van den Bossche, P.; Coosemans, T.; et al. Lithium iron phosphate based battery—Assessment of aging parameters and development of life cycle model. Appl. Energy 2014, 113, 1575–1585. [Google Scholar] [CrossRef]
- Shiau, C.-S.N.; Kaushal, N.; Hendrickson, C.T.; Paterson, S.B.; Whitacre, J.F.; Michalek, J.M. Optimal plug-in hybrid electric vehicle design and allocation for minimum life cycle cost, petroleum consumption and greenhouse gas emissions. Trans. ASME—J. Mech. Des. 2010, 132, 183–195. [Google Scholar] [CrossRef]
- Samadani, E.; Farhad, S.; Panchal, S.; Fraser, R.; Fowler, M. Modeling and Evaluation of Li-ion Battery Performance based on the Electric Vehicle Field Tests. In Proceedings of the SAE 2014 World Congress & Exhibition, Detroit, MI, USA, 8–10 April 2014. [Google Scholar] [CrossRef]
- Patil, M.; Panchal, S.; Kim, N.; Lee, M.Y. Cooling Performance characteristics of 20 Ah lithium-ion pouch cell with cold plates along both surfaces. Energies 2018, 11, 2550. [Google Scholar] [CrossRef]
- Musolino, V.; Toroni, E. A Comparison of supercapacitor and high-power lithium batteries. In Proceedings of the Electrical Systems for Aircraft, Railway and Ship Propulsion (ESARS) conference, Bologna, Italy, 19–21 October 2010. [Google Scholar] [CrossRef]
- Burke, A.; Miller, M. The power capability of ultracapacitors and lithium batteries for electric and hybrid vehicle applications. J. Power Sources 2011, 196, 514–522. [Google Scholar] [CrossRef]
- Aschilean, I.; Varlam, M.; Culcer, M.; Iliescu, M.; Raceanu, M.; Enache, A.; Raboaca, M.S.; Rasoi, G.; Filote, C. Hybrid electric powertrain with fuel cells for a series vehicle. Energies 2018, 11, 1294–1303. [Google Scholar] [CrossRef]
- Shen, J.; Dusmez, S.; Khaligh, A. Optimization of sizing and battery cycle life in battery/ultracapacitor hybrid energy storage systems for electric vehicle applications. IEEE Trans. Ind. Inf. 2014, 10, 2112–2121. [Google Scholar] [CrossRef]
- Song, Z.; Li, B.; Hou, J.; Hofmann, H.; Ouyang, M.; Du, J. The battery-supercapacitor hybrid energy storage system in electric vehicle applications: A case study. Energy 2018, 154, 433–441. [Google Scholar] [CrossRef]
- Nájera, J.; Moreno-Torres, P.; Lafoz, M.; de Castro, R.M.; Arribas, J.R. Approach to hybrid energy storage systems dimensioning for urban electric buses regarding efficiency and battery aging. Energies 2017, 10, 1708. [Google Scholar] [CrossRef]
- Thounthong, P.; Rael, S. The benefits of hybridization. IEEE Ind. Electron. Mag. 2009, 3, 25–37. [Google Scholar] [CrossRef]
- Wang, B.; Xu, J.; Cao, B.; Yang, Q. Compound-type hybrid energy storage and its mode control strategy for electric vehicles. J. Power Electron. 2015, 15, 849–859. [Google Scholar] [CrossRef]
- Gao, L.; Dougal, R.A.; Liu, S. Power enhancement of an actively controlled battery/ultracapacitor hybrid. IEEE Trans. Power Electron. 2005, 20, 236–243. [Google Scholar] [CrossRef]
- Dixon, J.; Nakashima, I.; Arcos, E.F.; Ortúzar, M. Electric vehicle using a combination of ultracapacitors and zebra battery. IEEE Trans. Ind. Electron. 2010, 57, 943–949. [Google Scholar] [CrossRef]
- Tan, B.K.; Tan, N.M.L.; Ramasamy, A.K. Design of a battery-ultracapacitor hybrid energy-storage system with power flow control for an electric vehicle. Int. J. Power Electron. Drive Syst. 2018, 9, 286–296. [Google Scholar] [CrossRef]
- Wang, P.; Zhao, C.; Zhang, Y.; Li, J.; Cao, Y. A bidirectional three-level dc-dc converter with a wide voltage conversion range for hybrid energy source electric vehicles. J. Power Electron. 2017, 17, 334–345. [Google Scholar] [CrossRef]
- Thounthong, P.; Rael, S.; Davat, B. Energy management of fuel cell/battery/supercapacitor hybrid power source for vehicle applications. J. Power Sources 2009, 193, 376–385. [Google Scholar] [CrossRef]
- Aharon, I.; Kuperman, A. Topological overview of powertrains for battery-powered vehicles with range extenders. IEEE Trans. Power Electron. 2011, 26, 868–876. [Google Scholar] [CrossRef]
- Lu, S.; Corzine, K.A.; Ferdowsi, M. A new battery/ultracapacitor energy storage system design and its motor drive integration for hybrid electric vehicles. IEEE Trans. Veh. Technol. 2007, 56, 1516–1523. [Google Scholar] [CrossRef]
- Camara, M.B.; Gualous, H.; Gustin, F.; Berton, A. Design and new control of dc/dc converters to share energy between supercapacitors and batteries in hybrid vehicles. IEEE Trans. Veh. Technol. 2008, 57, 2721–2735. [Google Scholar] [CrossRef]
- Li, J.-Q.; Fu, Z.; Jin, X. Rule based energy management strategy for a battery/ultracapacitor hybrid energy storage system optimized by pseudospectral method. Energy Proced. 2017, 105, 2705–2711. [Google Scholar] [CrossRef]
- Hredzak, B.; Agelidis, V.G.; Jang, M. A model predictive control system for a hybrid battery-ultracapacitor power source. IEEE Trans. Power Electron. 2014, 29, 1469–1479. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, W.; Wei, S.; Lin, H.; Jia, Z. An improved energy management strategy for hybrid energy storage system in light rail vehicles. Energies 2018, 11, 423. [Google Scholar] [CrossRef]
- Jiang, X.; Hu, J.; Jia, M.; Zheng, Y. Parameter matching and instantaneous power allocation for the hybrid energy storage system of pure electric vehicles. Energies 2018, 11, 1933. [Google Scholar] [CrossRef]
- Yu, H.; Cheli, F.; Castelli-Dezza, F.; Cao, D.; Wang, F.-Y. Multi-objective Optimal Sizing and Energy Management of Hybrid Energy Storage System for Electric Vehicles. Available online: https://arxiv.org/pdf/1801.07183.pdf (accessed on 15 October 2018).
- Li, J.; Xiong, R.; Mu, H.; Cornélusse, B.; Vanderbemden, P.; Ernst, D.; Yuan, W. Design and real-time test of a hybrid energy storage system in the microgrid with the benefit of improving the battery lifetime. Appl. Energy 2018, 218, 470–479. [Google Scholar] [CrossRef]
- Schröder, D. Elektrische Antriebe: Regelung von Antriebssystemen; Springer-Verlag: Berlin, Germany, 2007; pp. 115–170. [Google Scholar]
- Pavković, D.; Lobrović, M.; Hrgetić, M.; Komljenović, A. A design of DC bus control system for evs based on battery/ultracapacitor hybrid energy storage. In Proceedings of the 2nd IEEE International Electrical Vehicle Conference (IEVC 2014), Florence, Italy, 17–19 December 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Pavković, D.; Lobrović, M.; Hrgetić, M.; Komljenović, A. A design of cascade control system and adaptive load compensator for battery/ultracapacitor hybrid energy storage-based direct current microgrid. Energy Convers. Manag. 2016, 114, 154–167. [Google Scholar] [CrossRef]
- Pavković, D.; Užarević, V.; Kristović, P.; Hrgetić, M.; Komljenović, A. DC bus feed-forward/feedback control for evs with battery/ultracapacitor energy storage system. In Proceedings of the IEEE EUROCON 2017, Ohrid, Republic of Macedonia, 6–8 July 2017; pp. 318–323. [Google Scholar]
- Olszewski, M. Evaluation of 2004 Toyota Prius Hybrid Electric Drive System. Available online: https://www.engr.uvic.ca/~mech459/ (accessed on 22 August 2018).
- He, X.; Munari, B.; Orberger, T.; Nelke, J. Siemens ELFA Drive System for Hybrid Electric Vehicles. In Proceedings of the 2011 SAE International’s Commercial Vehicle Engineering Congress, Chicago, IL, USA, 13–14 September 2011. [Google Scholar] [CrossRef]
- Najmabadi, A.; Humphries, K.; Boulet, B.; Rahman, T. Battery voltage optimization of a variable DC bus voltage control powertrain for medium duty delivery trucks for various drive cycles. In Proceedings of the 2016 IEEE Transportation Electrification Conference, Dearborn, MI, USA, 27–29 June 2016. [Google Scholar] [CrossRef]
- Kolar, J.W.; Round, S.D. Analytical calculation of the rms current stress on the dc link capacitor of voltage-pwm converter systems. IEE Proc. Electr. Power Appl. 2006, 153, 535–543. [Google Scholar] [CrossRef]
- Naslin, P. Practical Optima, Chap. 2 of Essentials of Optimal Control; Iliffe Books Ltd.: London, UK, 1968. [Google Scholar]
- US Environmental Protection Agency (EPA). Dynamometer Drive Schedules. Available online: http://www.epa.gov (accessed on 22 August 2018).
- Odvářka, E.; Mebarki, A.; Gerada, D.; Brown, N.; Ondrůšek, Č. Electric Motor-generator for a Hybrid Electric Vehicle. Eng. Mech. 2009, 16, 131–139. [Google Scholar]
- Zhong, Q.-C.; Hornik, T. Control of Power Inverters in Renewable Energy and Smart Grid Integration; John Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 63–78. [Google Scholar]
- Sun, J.; Chen, M. Nonlinear average current control using partial current measurement. IEEE Trans. Power Electron. 2008, 23, 1641–1648. [Google Scholar] [CrossRef]
- Wang, J.B.; Chuang, C.Y. Design considerations of microprocessor-controlled multiphase battery charger with fast-charging strategy. IET Electr. Power Appl. 2007, 1, 143–152. [Google Scholar] [CrossRef]
- Pavković, D.; Polak, S.; Zorc, D. PID controller auto-tuning based on process step response and damping optimum criterion. ISA Trans. 2014, 53, 85–96. [Google Scholar] [CrossRef] [PubMed]
- Williams, B.W. Power Electronics: Devices, Drivers, Applications and Passive Components; McGraw-Hill: New York, NY, USA, 1992; pp. 375–421. [Google Scholar]
- Zhou, H.; Bhattacharya, T.; Tran, D.; Siew, T.S.T.; Khambadkone, A.M. Composite energy storage system involving battery and ultracapacitor with dynamic energy management in microgrid Applications. IEEE Trans. Power Electron. 2011, 26, 923–930. [Google Scholar] [CrossRef]
- GWL/Power Group. SE100AHA Cell Specification. 2014. Available online: https://www.ev-power.eu/docs/GWL-LFP-Product-Spec-40AH-200AH.pdf (accessed on 15 October 2018).
- Maxwell Technologies. 125 V Heavy Transportation Module—Datasheet No. 1014696.7. 2013. Available online: http://www.maxwell.com/images/documents/125vmodule_ds_1014696-7.pdf (accessed on 15 October 2018).
- Siemens AG. 1FT6 Synchronous Motors—SINAMICS Configuration Manual. 2005. Available online: https://cache.industry.siemens.com/dl/files/289/28708289/att_2592/v1/PFT6_1005_en.pdf (accessed on 15 October 2018).
- Pavković, D.; Krznar, M.; Komljenović, A.; Hrgetić, M.; Zorc, D. Dual EKF-based state and parameter estimator for a LiFePO4 battery cell. J. Power Electron. 2017, 17, 398–410. [Google Scholar] [CrossRef]
- Cipek, M.; Pavković, D.; Petrić, J. A control-oriented simulation model of a power-split hybrid electric vehicle. Appl. Energy 2013, 101, 121–133. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Inductor inductance Lc | 13 mH | DC bus capacitance Cdc | 40 mF |
| Series resistance of inductor Rc | 0.1 Ω | Ultracapacitor ESS equivalent lag Teu | 15 ms |
| Rated voltage of battery Ub | 320 V | Battery ESS equivalent lag Teb | 200 ms |
| Rated charge capacity of battery Qb | 100 Ah | Voltage reference scaling factor κκu | 1.1 |
| Battery internal resistance Rb | 0.08 Ω | Feed-forward lead time constant Tff | 15 ms |
| Ultracapacitor voltage limit Uu,max | 375 V | DC bus voltage lower limit Umin | 328 V |
| Ultracapacitor rated capacitance Cu | 21 F | DC bus voltage upper limit Umax | 690 V |
| Ultracapacitor resistance Ru | 45 mΩ | DC bus parasitic lag T∑ | 5 ms |
| Ultracapacitor ESS current controller (fast) proportional gain Kci | 1.78 V/A | Ultracapacitor ESS current controller (fast) integral time constant Tci | 13 ms |
| Ultracapacitor ESS current controller (slow) proportional gain Kci | 1.78 V/A | Ultracapacitor ESS current controller (fast) integral time constant Tci | 26 ms |
| Battery ESS current controller (fast) proportional gain Kci | 1.63 V/A | Battery ESS current controller (slow) proportional gain Kci | 14 ms |
| Battery ESS current controller (slow) integral time constant Tci | 1.63 V/A | Battery ESS current controller (slow) integral time constant Tci | 140 ms |
| Ultracapacitor auxiliary controller proportional gain Kca | 8.62 A/V | Ultracapacitor auxiliary controller integral time constant Tca | 191 ms |
| DC bus voltage controller proportional gain Kdc | 1 A/V | DC bus voltage controller integral time constant Tdc | 80 ms |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Overall vehicle mass mv | 1500 kg | Transmission (gearbox) ratio ig | 2 |
| Battery ESS mass | 320 kg | PMSM torque constant kT = 1.5 pΦr | 1.52 Nm/A |
| Battery ESS volume | 0.22 m3 | PMSM EMF constant kE = pΦr | 1.01 Vs/rad |
| Ultracapacitor ESS mass | 180 kg | PMSM armature inductance La | 0.95 mH |
| Ultracapacitor ESS volume | 0.22 m3 | PMSM armature resistance Ra | 26 mΩ |
| Free fall acceleration g | 9.81 m/s2 | PMSM inverter voltage lag Tdi | 1 ms |
| Coefficient of rolling resistance Ro | 0.008 | PMSM moment of inertia Jm | 0.066 kgm2 |
| Air density ρa | 1.224 kg/m3 | PMSM number of pole pairs p | 3 |
| Coefficient of air drag Cd | 0.29 | PMSM current controller proportional gain Kcd(cq) | 1.083 V/A |
| Vehicle frontal area Af | 2.3 m2 | PMSM current controller integral time constant Tcd(cq) | 36.5 ms |
| Wheel radius rw | 0.305 m | PMSM torque loop lag Tei | 2 ms |
| Wheel moment of inertia Jw | 0.8 kgm2 | Virtual driver gain Kdr | 1877 N·s |
| Driver lag Td | 100 ms | Virtual driver time constant Tdr | 400 ms |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Inductor inductance Lc | 0.7 mH | Ultracapacitor resistance Ru | 0.1 Ω |
| Series resistance of inductor Rc | 0.05 Ω | DC bus parasitic lag T∑ | 5 ms |
| Battery rated voltage and capacity | 12V/55Ah | DC bus capacitance Cdc | 40 mF |
| Battery internal resistance Rb | 0.025 Ω | Ultracapacitor ESS equivalent lag Teu | 15 ms |
| Ultracapacitor voltage limit Uu,max | 28 V | Battery ESS equivalent lag Teb | 100 ms |
| Ultracapacitor rated capacitance Cu | 22.2 F | Feed-forward lead time constant Tff | 15 ms |
| Ultracapacitor ESS current controller proportional gain Kci | 0.165 V/A | Ultracapacitor ESS current controller integral time constant Tci | 7 ms |
| Battery ESS current controller proportional gain Kci | 0.007 V/A | Battery ESS current controller integral time constant Tci | 47.5 ms |
| Ultracapacitor auxiliary controller proportional gain Kca | 2.48 A/V | Ultracapacitor auxiliary controller integral time constant Tca | 280 ms |
| DC bus controller proportional gain Kdc | 1 V/V | DC bus controller integral time constant Tdc | 80 ms |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pavković, D.; Cipek, M.; Kljaić, Z.; Mlinarić, T.J.; Hrgetić, M.; Zorc, D. Damping Optimum-Based Design of Control Strategy Suitable for Battery/Ultracapacitor Electric Vehicles. Energies 2018, 11, 2854. https://doi.org/10.3390/en11102854
Pavković D, Cipek M, Kljaić Z, Mlinarić TJ, Hrgetić M, Zorc D. Damping Optimum-Based Design of Control Strategy Suitable for Battery/Ultracapacitor Electric Vehicles. Energies. 2018; 11(10):2854. https://doi.org/10.3390/en11102854
Chicago/Turabian StylePavković, Danijel, Mihael Cipek, Zdenko Kljaić, Tomislav Josip Mlinarić, Mario Hrgetić, and Davor Zorc. 2018. "Damping Optimum-Based Design of Control Strategy Suitable for Battery/Ultracapacitor Electric Vehicles" Energies 11, no. 10: 2854. https://doi.org/10.3390/en11102854