Stochastic Programming-Based Fault Diagnosis in Power Systems Under Imperfect and Incomplete Information

Abstract
:1. Introduction
2. Chance-Constrained Programming
3. Analytic Model of Power System Fault Diagnosis Based on CPP
3.1. Modeling of Uncertain Factors
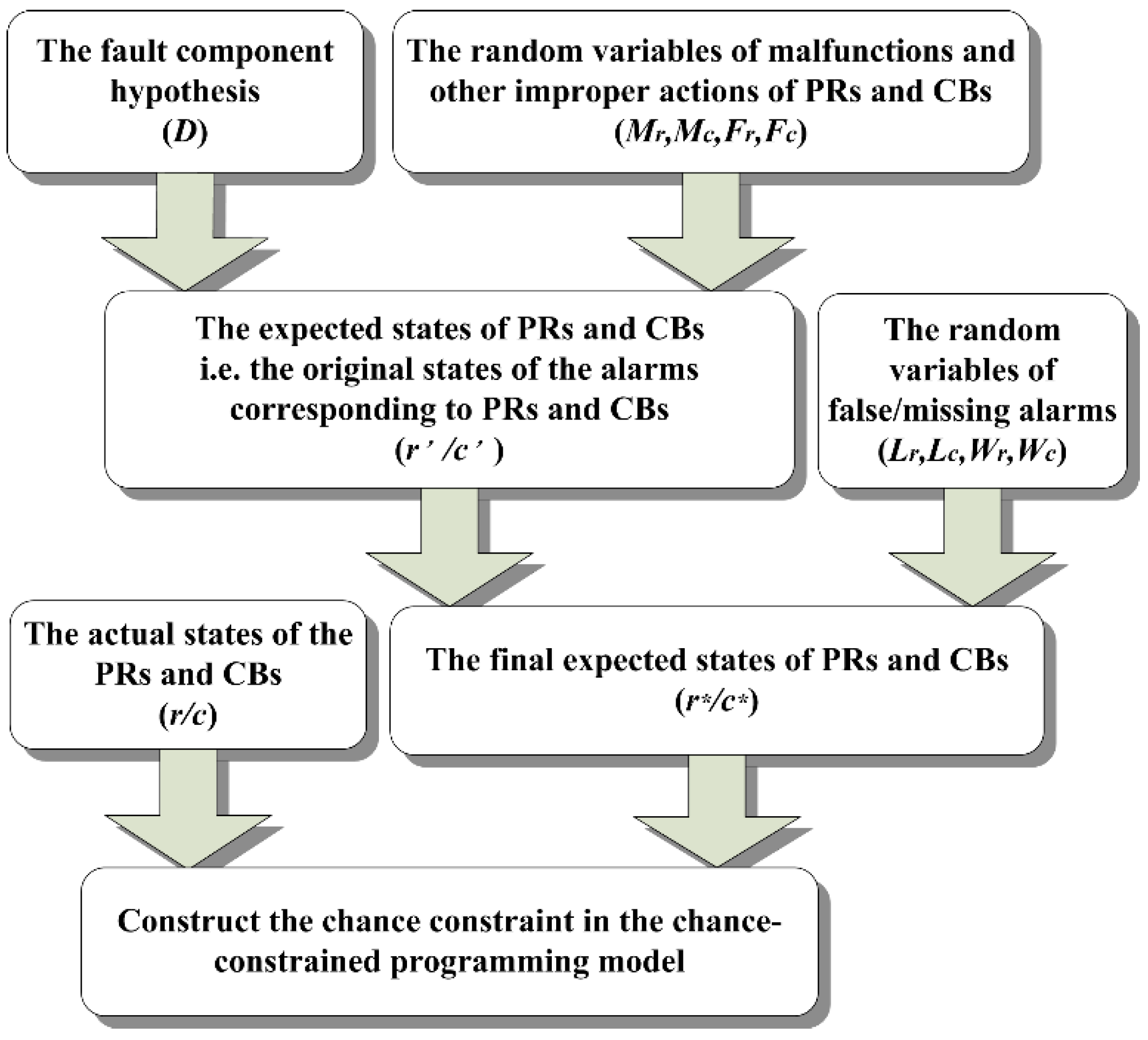
3.2. Analytic Model
3.3. Determination of the Expected States of PRs and CBs with Potential Malfunctions
3.3.1. PRs
- (a)
- If a fault occurred on , and both MP and BPB failed to operate, then should operate, i.e.,
- (b)
- If a fault occurred on the related device dj in the protection zone of ri, and all CBs along the related path from to were closed, i.e., the fault has not been cleared yet, then ri should operate. denotes the set of related sections in the protection zone, . So there is
3.3.2. CBs
3.4. The Final Expected States of PRs and CBs
4. Solving the Fault Diagnosis Problem
4.1. Constraint Checking
4.2. The Calculation of the Objective Function
- (a)
- The random variables are sampled times, and is calculated by using Equation (3) to obtain the sequence .
- (b)
- Set as the integer part of .
- (c)
- Select the smallest element in the sequence to be the objective value .
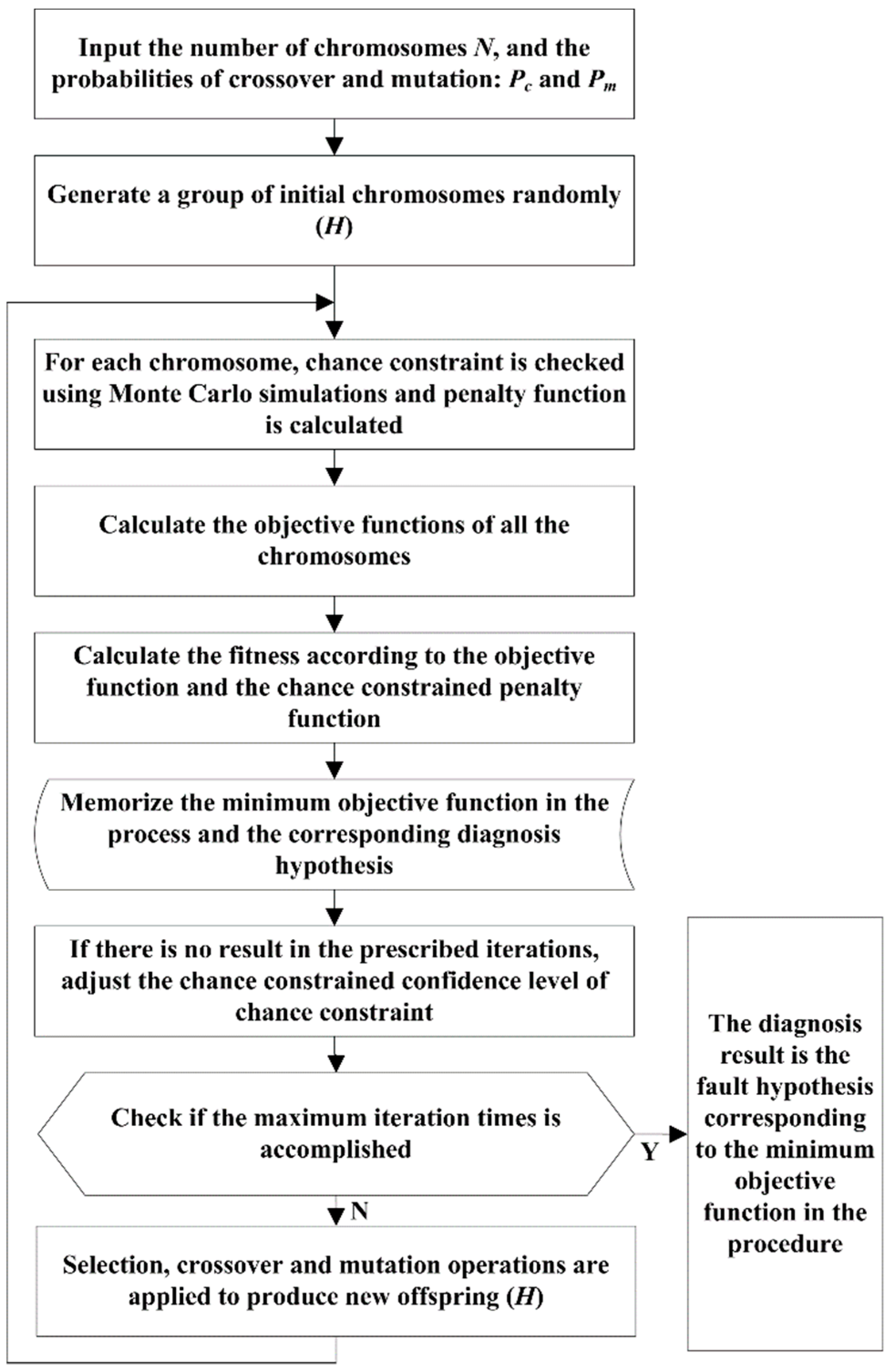
4.3. The Solving Procedure
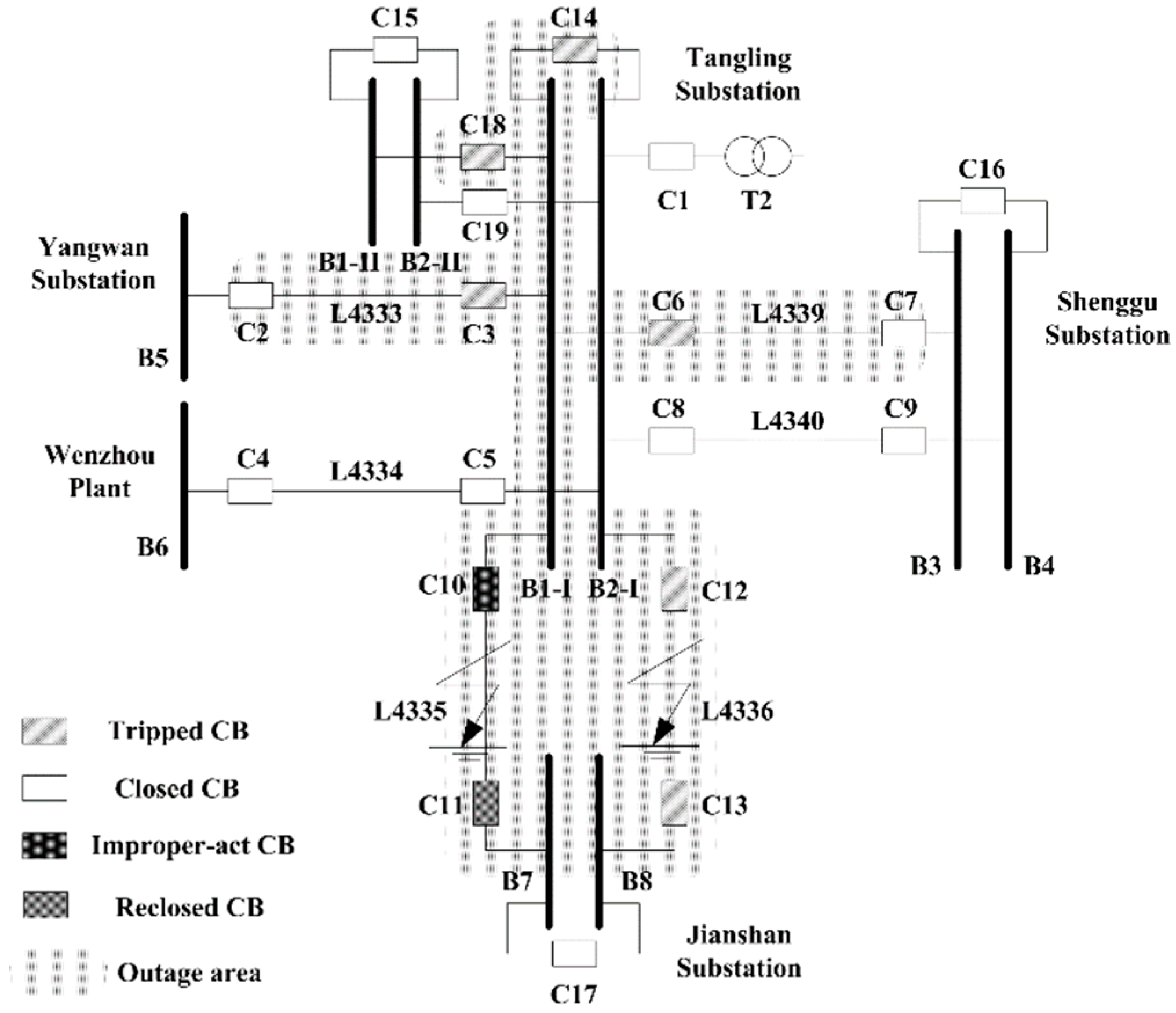
5. Application Examples
- the number of chromosomes is set to 20;
- the times of Monte Carlo simulations is set to 1000;
- the initial value of confidence level is set to 0.3;
- is set to 0.7;
- the times of iterations is set to 1000;
- the probabilities of crossover and mutation are set to 0.5 and 0.3.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclatures
| PRs | Protective relays |
| CBs | Circuit breakers |
| ES | Expert system |
| ANN | Artificial neural network |
| FS | Fuzzy set |
| CCP | Chance-constrained programming |
| MP | Main Protection |
| PBP | Primary Backup Protection |
| SBP | Secondary Backup Protection |
| BFP | Breaker Failure Protection |
| GA | Genetic algorithm |
| Vector of decision variables | |
| Stochastic vector with a given probability density function | |
| Objective function in CPP | |
| Constraint function in CPP | |
| Probability of the events in the set in CPP | |
| Prescribed confidence levels of the constraints function in CPP | |
| Prescribed confidence levels of the objective function in CPP | |
| Minimum value of with the confidence level in CPP | |
| Probabilities of the malfunction () of the ith PR () | |
| Probabilities of the refusing () action of the ith PR () | |
| Probabilities of the malfunction ()of the jth CB () | |
| Probabilities of the refusing action () of the jth CB () | |
| Probabilities of the false alarm ()of | |
| Probabilities of the missing alarm () of | |
| Probabilities of the false alarm () of | |
| Probabilities of the missing alarm () of | |
| Number of component in the outage area before the fault | |
| Number of configured PRs connected to the outage components before the fault | |
| Number of configured CBs connected to the outage components before the fault | |
| Fault hypothesis in analytic model | |
| Random vectors of the malfunctioning actions of the PRs and CBs | |
| Random vectors of the refusing actions of the PRs and CBs | |
| W | Random vectors of the false missing alarms |
| Random vectors of the the missing alarms | |
| Objective function of the analytic model | |
| Actual states of PRs in analytic model | |
| Expected states of PRs in analytic model | |
| Actual states of CBs in analytic model | |
| Expected states of CBs in analytic model | |
| Probability of in analytic model | |
| Initial value of in analytic model | |
| Number of the iterations in analytic model | |
| Maximum number of iterations set in analytic model | |
| Minimum of the objective function with the confidence level | |
| Expected states of the corresponding PR with considering the malfunctioning and other improper actions in analytic model | |
| Expected states of the corresponding CB with considering the malfunctioning and other improper actions in analytic model | |
| Final expected states of the corresponding PR in analytic model | |
| Final expected states of the corresponding CB in analytic model | |
| logic multiplication | |
| logic summation |
References
- Minakawa, T.; Ichikawa, Y.; Kunugi, M.; Wada, N.; Shimada, K.; Utsunomiya, M. Development and implementation of a power system fault diagnosis expert system. IEEE Trans. Power Syst. 1995, 10, 932–940. [Google Scholar] [CrossRef]
- Lee, H.J.; Ahn, B.S.; Park, Y.M. A fault diagnosis expert system for distribution substations. IEEE Trans. Power Deliv. 2000, 15, 92–97. [Google Scholar]
- Wen, F.S.; Chang, C.S. Probabilistic approach for fault-section estimation in power systems based on a refined genetic algorithm. IEE Proc. Gener. Transm. Distrib. 1997, 144, 160–168. [Google Scholar] [CrossRef]
- Wen, F.S.; Chang, C.S. Possibilistic-diagnosis theory for fault-section estimation and state identification of unobserved protective relays using tabu-search method. IEE Proc. Gener. Transm. Distrib. 1998, 145, 722–730. [Google Scholar] [CrossRef]
- Wen, F.S.; Chang, C.S. A new approach to time constrained fault diagnosis using the Tabu search method. J. Eng. Intell. Syst. 2002, 10, 19–25. [Google Scholar]
- Lin, X.N.; Ke, S.H.; Li, Z.T.; Weng, H.L.; Han, X.H. A fault diagnosis method of power systems based on improved objective function and genetic algorithm-tabu search. IEEE Trans. Power Deliv. 2010, 25, 1268–1274. [Google Scholar] [CrossRef]
- Guo, W.X.; Wen, F.S.; Ledwich, G.; Liao, Z.W.; He, X.Z.; Liang, J.H. An analytic model for fault diagnosis in power systems considering malfunctions of protective relays and circuit breakers. IEEE Trans. Power Deliv. 2010, 25, 1393–1401. [Google Scholar] [CrossRef]
- Yang, H.T.; Chang, W.Y.; Huang, C.L. Power system distributed on-line fault section estimation using decision tree based neural nets Approach. IEEE Trans. Power Deliv. 1995, 10, 540–546. [Google Scholar] [CrossRef]
- Sun, J.; Qin, S.Y.; Song, Y.H. Fault diagnosis of electric power systems based on fuzzy Petri nets. IEEE Trans. Power Syst. 2004, 19, 2053–2059. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y.; Wen, F.S.; Chung, C.Y.; Tseng, C.L.; Zhang, X.; Zeng, F.; Peng, Z. A fuzzy Petri net based approach for power system fault diagnosis enhanced with temporal constraints. Int. J. Electr. Power Energy Syst. 2016, 78, 215–224. [Google Scholar] [CrossRef]
- McArthur, S.D.J.; Davison, E.M.; Hossack, J.A.; McDonald, J.R. Automating power system fault diagnosis through Multi-agent system. In Proceedings of the 37th Annual Hawaii International Conference on System Sciences, Big Island, HI, USA, 5–8 January 2004. [Google Scholar]
- Huang, Y.C. Abductive reasoning network based diagnosis system for fault section estimation in power systems. IEEE Trans. Power Deliv. 2002, 17, 369–374. [Google Scholar] [CrossRef]
- Wei, L.; Guo, W.; Wen, F.S.; Ledwich, G.; Liao, Z.; Xin, J. Waveform matching approach for fault diagnosis of high voltage transmission lines employing harmony search algorithm. IET (IEE) Proc. Gener. Transm. Distrib. 2010, 4, 801–809. [Google Scholar] [CrossRef]
- Zhu, Y.; Huo, L.; Lu, J. Bayesian networks-based approach for power systems fault diagnosis. IEEE Trans. Power Deliv. 2006, 21, 634–639. [Google Scholar]
- Chen, W.; Tsai, S.; Lin, H. Fault section estimation for power networks using logic Cause-Effect models. IEEE Trans. Power Deliv. 2011, 26, 963–971. [Google Scholar] [CrossRef]
- Edwards, C.J.; Davidson, E.M.; McArthur, S.D.J.; Watt, I.; Cumming, T. Flexible model-based alarm processing for protection performance assessment and incident identification. IEEE Trans. Power Syst. 2013, 28, 2584–2591. [Google Scholar] [CrossRef]
- Deng, W.; Chen, R.; Yang, X.; Song, Y.; Li, W. An intelligent fault diagnosis method based on soft computing and expert system. Int. J. Eng. Intell. Syst. Electr. Eng. Commun. 2010, 18, 77–84. [Google Scholar]
- Bedekar, P.P.; Bhide, S.R.; Kale, V.S. Fault section estimation in power system using Hebb’s rule and continuous genetic algorithm. Int. J. Electr. Power Energy Syst. 2011, 33, 457–465. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Z.; Zhang, J.; Ma, J. Fault localization in electrical power systems: A pattern recognition approach. Int. J. Electr. Power Energy Syst. 2011, 33, 791–798. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, Y.; Luo, F.; Dong, Z.; Peng, Y. Power system fault diagnosis based on history driven differential evolution and stochastic time domain simulation. Inf. Sci. 2014, 275, 13–29. [Google Scholar] [CrossRef]
- Korkalı, M.; Abur, A. Optimal deployment of wide-area synchronized measurements for fault-location observability. IEEE Trans. Power Syst. 2013, 28, 482–489. [Google Scholar] [CrossRef]
- Pradhan, K.; Kundu, P. Online identification of protection element failure using wide area measurements. IET Gener. Transm. Distrib. 2015, 9, 115–123. [Google Scholar]
- Charnes, A.; Cooper, W.W. Chance-constrained programming. Manag. Sci. 1959, 6, 73–79. [Google Scholar] [CrossRef]
- Yang, N.; Wen, F.S. A chance constrained programming approach to transmission system expansion planning. J. Eletr. Power Syst. Res. 2005, 75, 171–177. [Google Scholar] [CrossRef]
- Yang, N.; Yu, C.; Wen, F.S.; Chung, C.Y. An investigation of reactive power planning based on chance constrained programming. Int. J. Electr. Power Energy Syst. 2007, 29, 650–656. [Google Scholar] [CrossRef]
- Yu, W.; Wang, L.; Wen, F.S.; Chung, T.S. Optimal spinning reserve capacity determination using a chance-constrained programming approach. Int. J. Eletr. Power Compon. Syst. 2007, 35, 1131–1143. [Google Scholar] [CrossRef]
- Ozturk, U.A.; Mazumdar, M.; Norman, B.A. A solution to the stochastic unit commitment problem using chance constrained programming. IEEE Trans. Power Syst. 2004, 19, 1589–1598. [Google Scholar] [CrossRef]
- Wu, J.; Zhu, J.; Chen, G.; Zhang, H. A hybrid method for optimal scheduling of short-term electric power generation of cascaded hydroelectric plants based on particle swarm optimization and chance-constrained programming. IEEE Trans. Power Syst. 2008, 23, 1570–1579. [Google Scholar]
- Yu, H.; Chung, C.Y.; Wong, K.P.; Zhang, J.H. A chance constrained transmission network expansion planning method with consideration of load and wind farm uncertainties. IEEE Trans. Power Syst. 2009, 24, 1568–1576. [Google Scholar] [CrossRef]
- Zorgati, R.; Ackooij, W.V.; Apparigliato, R. Supply shortage hedging: Estimating the electrical power margin for optimizing financial and physical assets with chance-constrained programming. IEEE Trans. Power Syst. 2009, 24, 533–540. [Google Scholar] [CrossRef]
- Zhang, Y.; Chung, C.Y.; Wen, F.S.; Zhong, J. An analytic model for fault diagnosis in power systems utilizing redundancy and temporal information of alarm messages. IEEE Trans. Power Syst. 2016, 31, 4877–4886. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Timestamp (ms) | Substation | Alarms | Timestamp (ms) | Substation | Alarms |
|---|---|---|---|---|---|
| 28 | Tangling | DP of L4335 operated | 665 | Tangling | Phase A of C18 was tripped |
| 31 | Jianshan | DP of L4335 operated | 665 | Tangling | Phase B of C18 was tripped |
| 75 | Tangling | Phase C of C10 was tripped | 666 | Tangling | Phase C of C18 was tripped |
| 79 | Jianshan | Phase C of C11 was tripped | 667 | Tangling | Phase A of C14 was tripped |
| 383 | Tangling | Acceleration Protection of C10 operated | 667 | Tangling | Phase B of C14 was tripped |
| 480 | Jianshan | DP of L4336 operated | 668 | Tangling | Phase C of C14 was tripped |
| 523 | Tangling | Phase A of C12 was tripped | 873 | Tangling | Phase A of C3 was tripped |
| 523 | Tangling | Phase B of C12 was tripped | 873 | Tangling | Phase B of C3 was tripped |
| 524 | Tangling | Phase C of C12 was tripped | 874 | Tangling | Phase C of C3 was tripped |
| 529 | Jianshan | Phase A of C13was tripped | 874 | Tangling | Phase A of C6 was tripped |
| 529 | Jianshan | Phase B of C13 was tripped | 875 | Tangling | Phase B of C6 was tripped |
| 529 | Jianshan | Phase C of C13 was tripped | 875 | Tangling | Phase C of C6 was tripped |
| 617 | Tangling | BFP of C10 operated |
| L4333 | L4339 | L4335 | L4336 | B1-I |
|---|---|---|---|---|
| d0 | d1 | d2 | d3 | d4 |
| L4333 | L4339 | L4335 | L4336 | B1-I | |
|---|---|---|---|---|---|
| MP | r0 | r1 | r2 | r3 | r4 |
| PBP | r5 | r6 | r7 | r8 | — |
| SBP | r9 | r10 | r11 | r12 | — |
| BFP | C3 | C6 | C10 | C14 | C18 |
| r13 | r14 | r15 | r16 | r17 |
| C2 | C3 | C6 | C7 | C10 | C11 | C12 | C13 | C14 | C18 |
|---|---|---|---|---|---|---|---|---|---|
| c0 | c1 | c2 | c3 | c4 | c5 | c6 | c7 | c8 | c9 |
| Alarm Type | MP | PBP | SBP | BFP | CB |
|---|---|---|---|---|---|
| Actual state | 00100 | 0000 | 0000 | 00100 | 0110011111 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, H.; Dong, M.; Han, R.; Wen, F.; Salam, M.A.; Chen, X.; Fan, H.; Ye, J. Stochastic Programming-Based Fault Diagnosis in Power Systems Under Imperfect and Incomplete Information. Energies 2018, 11, 2565. https://doi.org/10.3390/en11102565
Song H, Dong M, Han R, Wen F, Salam MA, Chen X, Fan H, Ye J. Stochastic Programming-Based Fault Diagnosis in Power Systems Under Imperfect and Incomplete Information. Energies. 2018; 11(10):2565. https://doi.org/10.3390/en11102565
Chicago/Turabian StyleSong, Huizhong, Ming Dong, Rongjie Han, Fushuan Wen, Md. Abdus Salam, Xiaogang Chen, Hua Fan, and Jian Ye. 2018. "Stochastic Programming-Based Fault Diagnosis in Power Systems Under Imperfect and Incomplete Information" Energies 11, no. 10: 2565. https://doi.org/10.3390/en11102565
APA StyleSong, H., Dong, M., Han, R., Wen, F., Salam, M. A., Chen, X., Fan, H., & Ye, J. (2018). Stochastic Programming-Based Fault Diagnosis in Power Systems Under Imperfect and Incomplete Information. Energies, 11(10), 2565. https://doi.org/10.3390/en11102565