Decentralized Energy Management of Networked Microgrid Based on Alternating-Direction Multiplier Method

Abstract
1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Contributions
- (1)
- The established optimization model is reformulated into a convex one by employing a second-order cone-relaxation technique. Additionally, an ADMM-based solution method is utilized to solve the presented optimization model in a fully distributed manner with limited information exchange among neighboring microgrids.
- (2)
- The method in this paper can effectively accommodate an arbitrary number of controllable devices given an ever-increasing penetration of distributed energy resources in a microgrid, and thus greatly explore the potential benefits of DG applications.
2. Mathematical Formulation
2.1. Objective Function
2.2. Constraints
2.3. Second-Order Cone Relaxation
3. Networked Decomposition and Alternating Direction Method of Multipliers (ADMM)-Based Solution Methodology
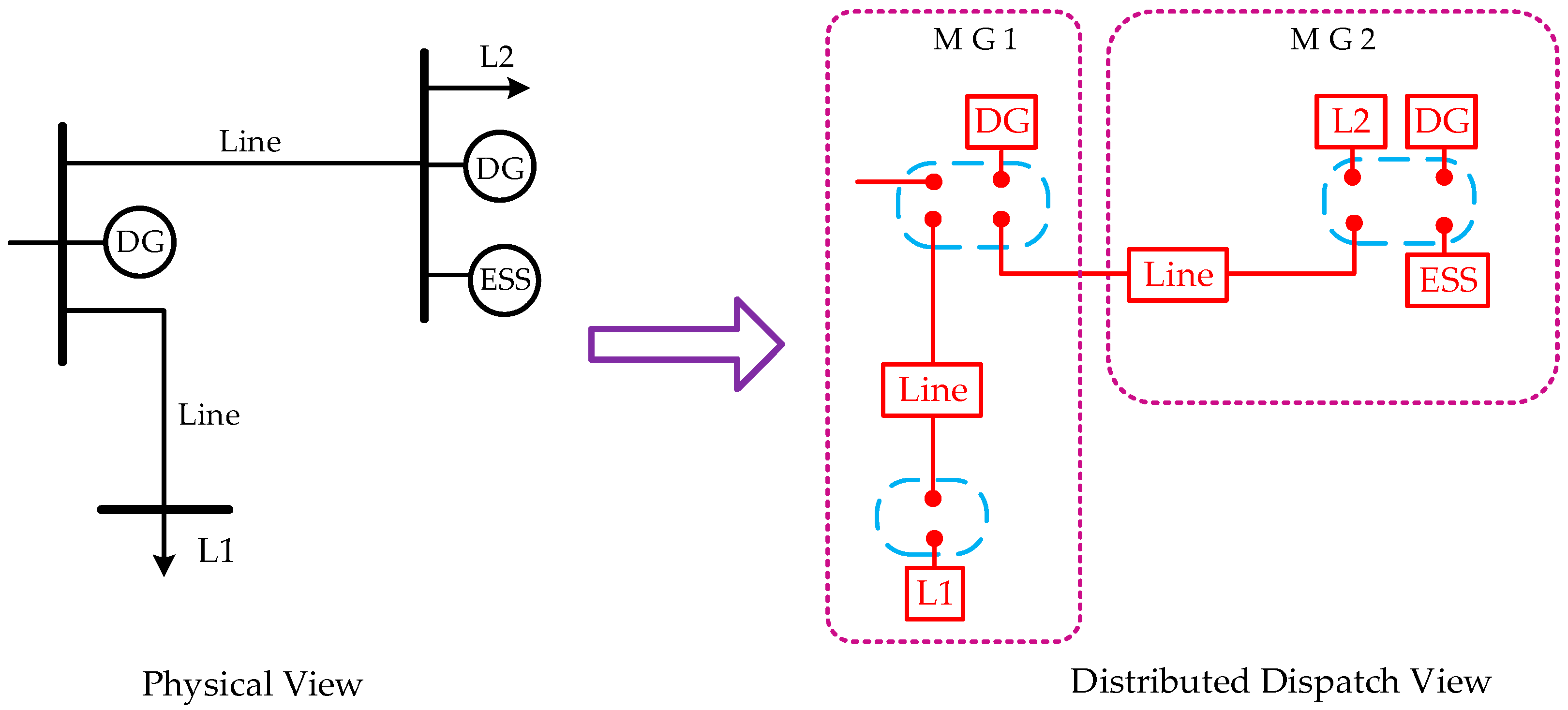
3.1. Decomposition of a Networked Microgrid (NM)
3.2. ADMM Algorithm
| Algorithm 1. Modified Alternating-Direction Multiplier Method (ADMM) algorithm. |
| 1. State variables update |
| 2. Dual variables update |
3.3. Overall Solution Framework
4. Case Studies
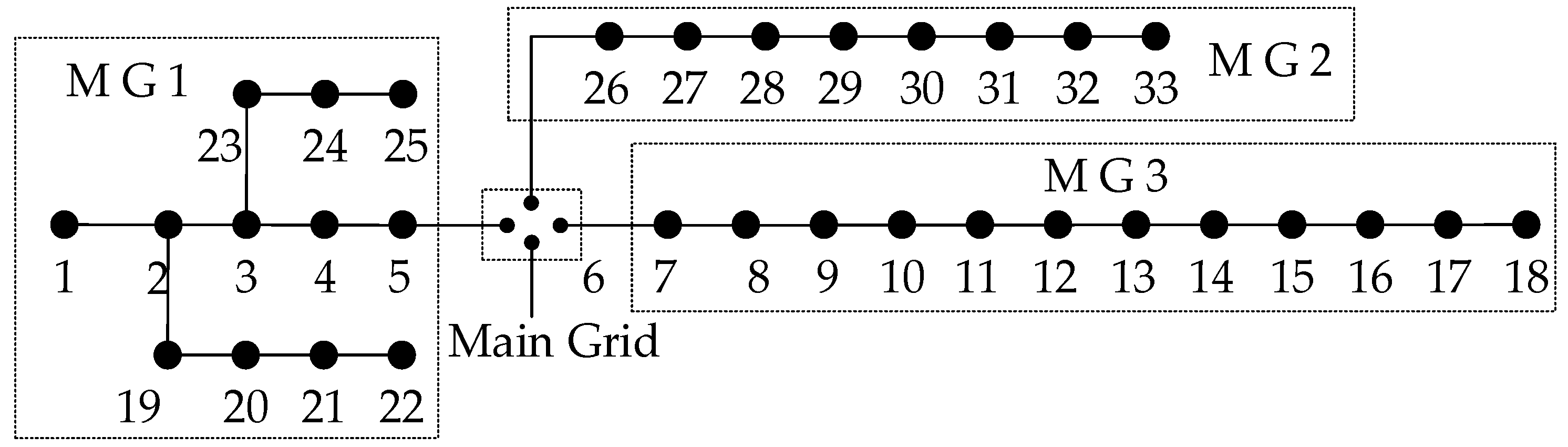
4.1. Simulation Data
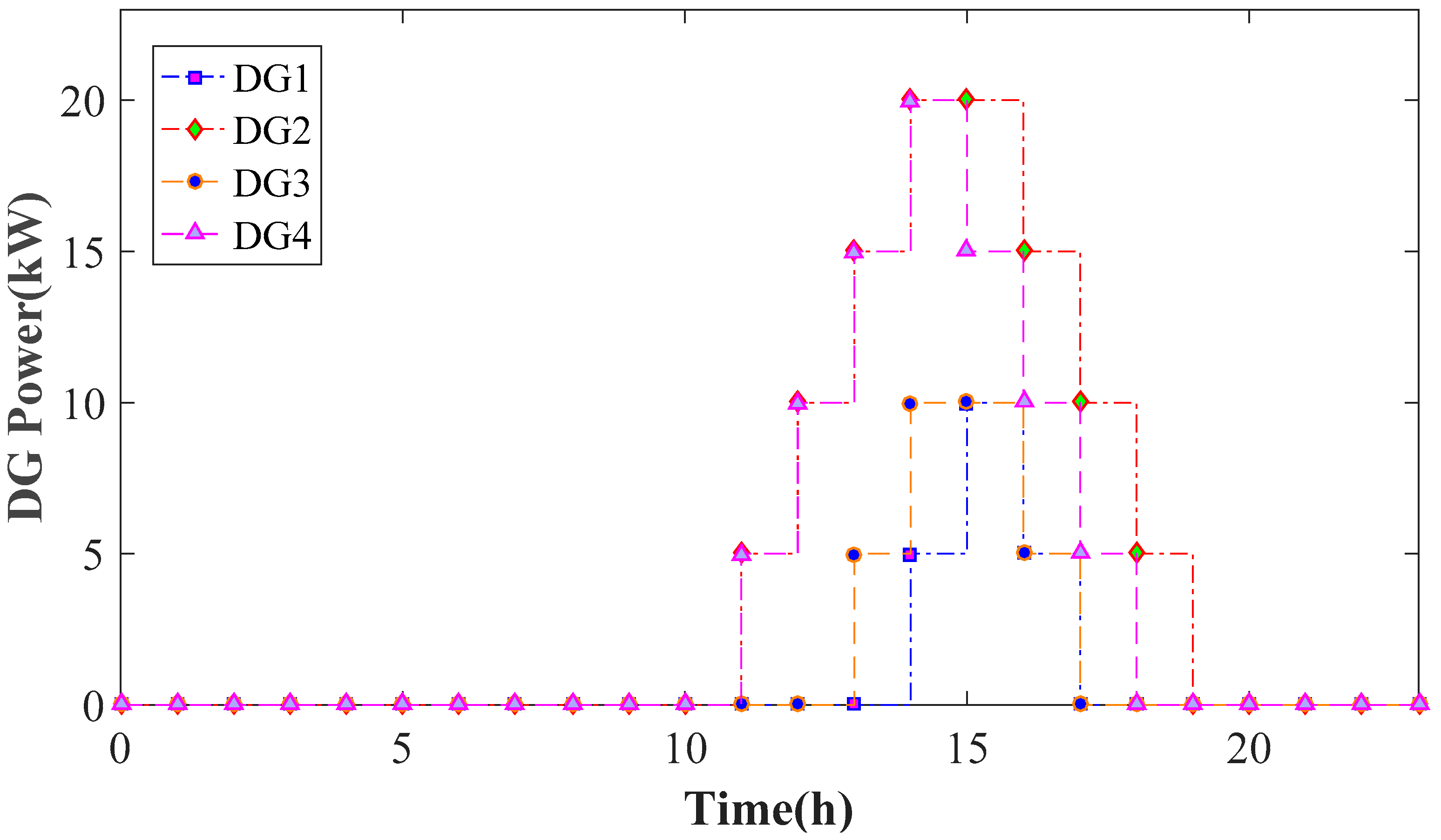
4.2. Optimization Results
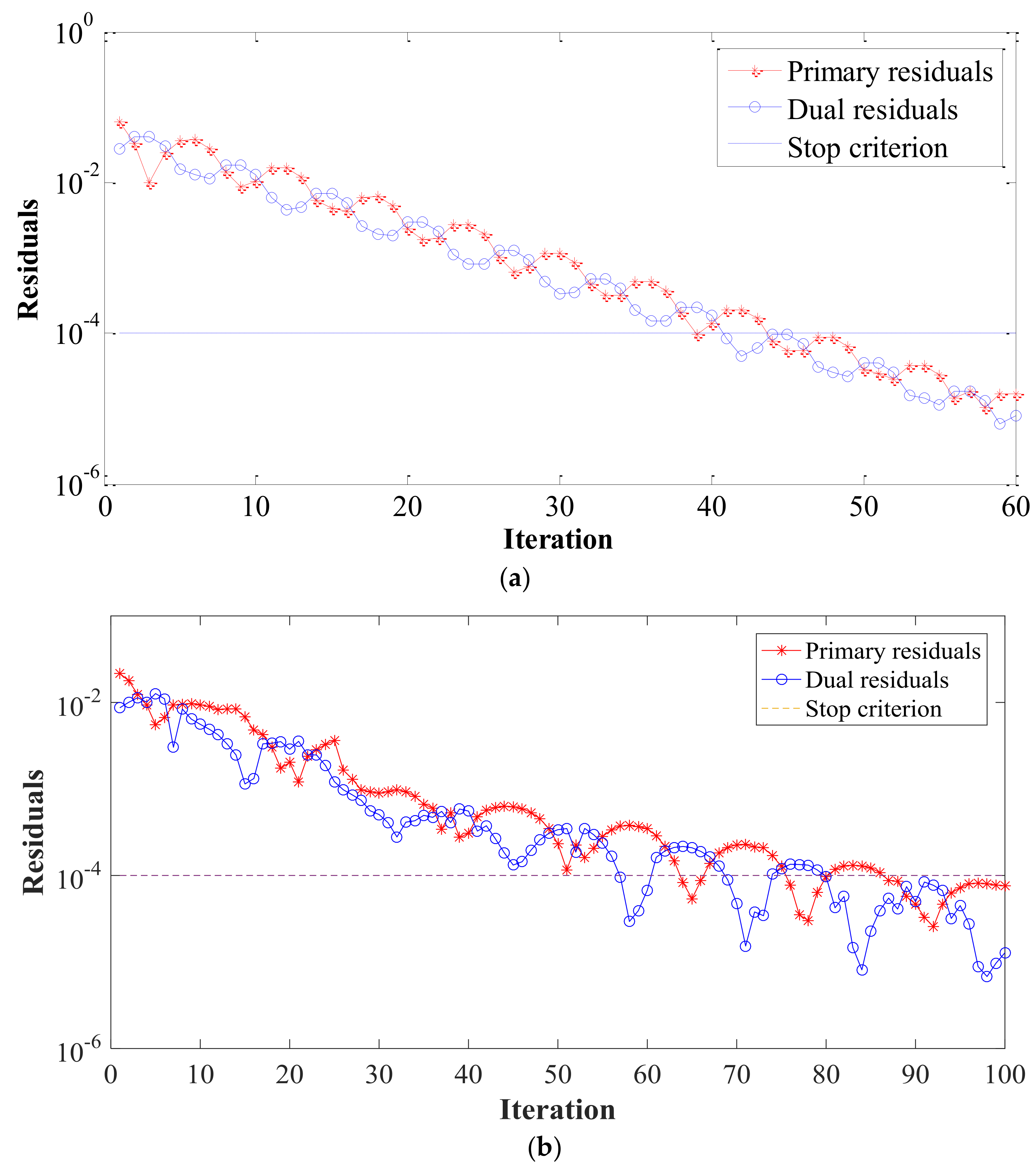
4.3. Convergence Analysis
4.4. Accuracy of Second-Order Cone (SOC) Relaxation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Acronym | |
| ADMM | Altering-direction multiplier method |
| DG | Distributed generator |
| NM | Networked microgrid |
| RES | Renewable-energy source |
| SOC | Second-order cone |
| Indices and set | |
| t | Index of time slots |
| a | Index of microgrid |
| d | Index of DG |
| i/k | Index of bus |
| T | Set of indices of time slots, T = {1, …, T} |
| N | Set of microgrids, N ={1, …, N} |
| Set of branches within microgrid a | |
| Set of buses within microgrid a | |
| Set of buses associated with fuel-based DGs within microgrid a | |
| Set of buses associated with RES-based DGs within microgrid a | |
| Parameters | |
| / | Lower/upper limit of voltage magnitude at bus i |
| Resistance/reactance associated with line ik within microgrid a | |
| Lower/upper limit of active power of fuel-based DG d | |
| / | Lower/upper limit of reactive power of fuel-based DG d |
| Lower/upper limit of reactive power of wind turbine d | |
| Lower/upper limit of reactive power of photovoltaic system d | |
| / | Lower/upper limit of RES-based DG d at time t |
| Minimum reactive power of the inverter interfaced with wind turbine d | |
| Energy price in the main grid at time t | |
| Energy price for the RES-based DGs at time t | |
| Maximum ramp rate of fuel-based DGs | |
| Maximum current of line ik | |
| Capacity of the inverter interfaced with wind turbine d/photovoltaic system d | |
| Reference value for the nodal voltage (normally 1 p.u.) | |
| Cost parameters of fuel-based DG d | |
| Variables | |
| Active power output of fuel-based DG d at time t within microgrid a | |
| Active power procurement from the main grid by microgrid a at time t | |
| Network loss in microgrid a at time t | |
| / | Active/reactive power in line ik at time t within microgrid a |
| / | Active and reactive power injections at bus i at time t within microgrid a |
| The square of the current magnitude of line ik at time t within microgrid a | |
| Voltage magnitude at bus i within microgrid a at time t | |
References
- Ilic, M. From hierarchical to open access electric power systems. Proc. IEEE 2007, 95, 1060–1084. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, B.; Wang, J.; Kim, J. Decentralized energy management system for networked microgrids in grid-connected and islanded modes. IEEE Trans. Smart Grid 2016, 7, 1097–1105. [Google Scholar] [CrossRef]
- Feng, C.; Li, Z.; Shahidehpour, M.; Wen, F.; Liu, W.; Wang, X. Decentralized short-term voltage control in active power distribution systems. IEEE Trans. Smart Grid 2018, 5, 4566–4576. [Google Scholar] [CrossRef]
- Li, Z.; Shahidehpour, M.; Wu, W.; Zeng, B.; Zhang, B.; Zheng, W. Decentralized multiarea robust generation unit and tie-lie scheduling under wind power uncertainty. IEEE Trans. Sustain. Energy 2015, 6, 1377–1388. [Google Scholar] [CrossRef]
- Mashhour, E.; MOghaddas-Tafreshi, S. Bidding strategy of virtual power plant for participating in energy and spinning reserve markets-Part I: Problem formulation. IEEE Trans. Power Syst. 2011, 2, 949–956. [Google Scholar] [CrossRef]
- Mao, M.; Jin, P.; Hatziagyriou, N.D.; Chang, L. Multiagent-based hybrid energy management system for microgrids. IEEE Trans. Sustain. Energy 2014, 5, 938–946. [Google Scholar] [CrossRef]
- Jiang, Q.; Xue, M.; Geng, G. Energy management of microgrid in grid-connected and stand-alone modes. IEEE Trans. Power Syst. 2013, 28, 3380–3389. [Google Scholar] [CrossRef]
- Chung, H.; Li, W.; Yuen, C.; Wen, C.; Crespi, N. Electric vehicle charge scheduling mechanism to maximize cost efficiency and user convenience. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Margellos, K.; Oren, S. Capacity controlled demand side management: A stochastic pricing analysis. IEEE Trans. Power Syst. 2016, 31, 706–717. [Google Scholar] [CrossRef]
- Qi, F.; Wen, F.; Liu, X.; Salam, M. A residential energy hub model with a concentrating solar power plant and electric vehicles. Energies 2017, 10, 1159. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, B.; Chu, C.; Pota, H.; Gadh, R. Energy management for a commercial building microgrid with stationary and mobile battery storage. Energy Build. 2016, 116, 141–150. [Google Scholar] [CrossRef]
- Conejo, A.J.; Castillo, E.; Minguez, R. Decomposition Techniques in Mathematical Programming: Engineering and Science Applications; Springer: Berlin, Germany, 2006; Volume 2, pp. 187–239. ISBN 9783540276869. [Google Scholar]
- Cohen, G. Auxiliary problem principle and decomposition of optimization problems. J. Optim. Theory Appl. 1980, 32, 277–305. [Google Scholar] [CrossRef]
- Kim, B.H.; Baldick, R. Coarse-grained distributed optimal power flow. IEEE Trans. Power Syst. 1997, 12, 932–939. [Google Scholar] [CrossRef]
- Mohammadi, A.; Megrtash, M.; Kargarian, A. Diagonal quadratic approximation for decentralized collaborative TSO+DSO optimal power flow. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Conejo, A.J.; Nogales, F.J.; Prieto, F.J. A decomposition procedure based on approximate Newton directions. Math. Program 2002, 93, 495–515. [Google Scholar] [CrossRef]
- Li, Z.; Guo, Q.; Sun, H.; Wang, J. Coordinated economic dispatch of coupled transmission and distributed systems using heterogeneous decomposition. IEEE Trans. Power Syst. 2016, 31, 4817–4830. [Google Scholar] [CrossRef]
- Guo, J.; Hug, G.; Tonguz, O.K. Intelligent partitioning in distributed optimization of electric power systems. IEEE Trans. Smart Grid 2016, 7, 1249–1258. [Google Scholar] [CrossRef]
- Li, J.; Xu, Z.; Wang, J.; Zhao, J.; Zhang, Y. Distributed transactive energy trading framework in distribution networks. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Liu, Y.; Gooi, H.; Jian, H.; Xin, H. Distributed robust energy management of a multi-microgrid system in the real-time energy market. IEEE Trans. Sustain. Energy 2017. [Google Scholar] [CrossRef]
- Tanaka, K.; Oshiro, M.; Toma, S.; Yona, A.; Senjyu, T.; Funabashi, T.; Kim, C.H. Decentralized control of voltage in distribution systems by distributed generators. IET Gener. Transm. Distrib. 2010, 4, 1251–1260. [Google Scholar] [CrossRef]
- Gan, L.; Low, S.H. Convex relaxations and linear approximation for optimal power flow in multiphase radial network. In Proceedings of the 18th Power Systems Computation Conference (PSCC), Wroclaw, Poland, 18–22 August 2014; pp. 1–9. [Google Scholar] [CrossRef]
- Peng, Q.; Low, S.H. Distributed algorithm for optimal power flow on a radial network, I: Balanced single-phase case. IEEE Trans. Smart Grid 2018, 9, 111–121. [Google Scholar] [CrossRef]
- Low, S.H. Convex relaxation of optimal power flow Part I: Formulations and equivalence. IEEE Trans. Control Netw. Syst. 2014, 1, 15–27. [Google Scholar] [CrossRef]
- Farivar, M.; Neal, R.; Clarke, C.; Low, S.H. Optimal inverter VAR control in distribution systems with high PV penetration. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 23–26 July 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Li, N.; Chen, L.; Low, S.H. Exact convex relaxation of optimal power flow for radial networks using branch flow model. IEEE Trans. Autom. Control 2012, 60, 72–87. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, C.; Di, Y.; Xydis, G.; Wang, J.; Østergaad, J. Review of real-time electricity markets for integrating distributed energy resources and demand response. Appl. Energy 2015, 138, 695–706. [Google Scholar] [CrossRef]
- Hu, J.; Wen, F.; Wang, K.; Huang, Y.; Salam, M. Simultaneous provision of flexible ramping product and demand relief by interruptible loads considering economic incentives. Energies 2018, 11, 46. [Google Scholar] [CrossRef]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized control for optimizing microgrids operation. IEEE Trans. Energy Convers. 2008, 23, 241–248. [Google Scholar] [CrossRef]
- Shen, J.; Jiang, C.; Liu, Y.; Wang, X. A microgrid energy management system and risk management under an electricity market environment. IEEE Access 2016, 4, 2349–2356. [Google Scholar] [CrossRef]
- Rahimiyan, M.; Baringo, L.; Conejo, A.J. Energy management of a cluster of interconnected price-responsive demands. IEEE Trans. Power Syst. 2014, 29, 645–655. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Le, L.B. Risk-constrained profit maximization for microgrid aggregators with demand response. IEEE Trans. Smart Grid 2015, 6, 135–146. [Google Scholar] [CrossRef]
- Malepor, A.R.; Anil, P.; Sanjoy, D. Inverter-based VAR control in low voltage distribution systems with rooftop solar PV. In Proceedings of the IEEE North American Power Symposium (NAPS), Manhattan, KS, USA, 22–24 September 2013; pp. 1–5. [Google Scholar] [CrossRef]
- American National Standard for Electric Power Systems and Equipment—Voltage Ratings (60 Hertz); ANSI Standard C84.1-2006; National Electrical Manufacturers Association: Rosslyn, VA, USA, 2006.
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2010, 3, 1–122. [Google Scholar] [CrossRef]
- Kraning, M.; Chu, E.; Javaei, J.; Boyd, S. Dynamic network energy management via proximal message passing. Found. Trends Mach. Learn. 2013, 1, 70–122. [Google Scholar] [CrossRef]
- MOSEK. Available online: https://mosek.com (accessed on 20 May 2018).
- UQ SQLAR PV Data. Available online: http://solar.uq.edu.au/ (accessed on 26 January 2016).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Value | 0.01 | 0.1 | 0.5 | 1 | 10 | 100 |
| Fixed- | 623 | 73 | 42 | 50 | Divergence | Divergence |
| Variable- | 40 | 50 | 43 | 53 | 64 | 59 |
| Probability | 0.1 | 0.2 | 0.3 |
| Required iteration number | 44 | 51 | 60 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, C.; Wen, F.; Zhang, L.; Xu, C.; Salam, M.A.; You, S. Decentralized Energy Management of Networked Microgrid Based on Alternating-Direction Multiplier Method. Energies 2018, 11, 2555. https://doi.org/10.3390/en11102555
Feng C, Wen F, Zhang L, Xu C, Salam MA, You S. Decentralized Energy Management of Networked Microgrid Based on Alternating-Direction Multiplier Method. Energies. 2018; 11(10):2555. https://doi.org/10.3390/en11102555
Chicago/Turabian StyleFeng, Changsen, Fushuan Wen, Lijun Zhang, Chenbo Xu, Md. Abdus Salam, and Shi You. 2018. "Decentralized Energy Management of Networked Microgrid Based on Alternating-Direction Multiplier Method" Energies 11, no. 10: 2555. https://doi.org/10.3390/en11102555
APA StyleFeng, C., Wen, F., Zhang, L., Xu, C., Salam, M. A., & You, S. (2018). Decentralized Energy Management of Networked Microgrid Based on Alternating-Direction Multiplier Method. Energies, 11(10), 2555. https://doi.org/10.3390/en11102555