1. Introduction
The general optimal economic dispatch is realized by designing unit commitment [
1] for obtaining the minimum overall generation cost [
2]. The centralized optimization methods are generally used in the economic dispatch problems, such as lambda iterative algorithms [
3] and interior point algorithms [
4], which require the objective function to be derivative. In practice, there exist conditions of valve-point loading effects in units’ startup stages [
5], prohibited operating zones during the operation periods [
6], and choices of the several economical fuels according to the actual power outputs [
5]. These conditions make the economic dispatch problem non-convex, and in this paper, we investigate a non-convex optimization algorithm to address its non-convex characteristic.
Modern metaheuristic algorithms can solve non-convex optimization problems efficiently [
7], mainly including genetic algorithm (GA [
5,
6,
8]), particle swarm optimization (PSO [
9,
10,
11,
12]), differential evolution algorithms [
13,
14], and ant colony optimization (ACO, [
15,
16,
17]). They all depend on dispatch centers to manage the information gathering from the whole system and will also use a centralized controller that will bring high communication costs. In addition, these controllers are prone to modeling errors and need a high-bandwidth communication structure with miscellaneous links [
18]. Moreover, the reliability of the system is easily vulnerable to the single-point of failure [
19]. Recently, the topology of power grids and communication networks are getting time-varying and extensible, but heuristic algorithms suffer a great challenge in meeting the changes.
At present, the distributed framework for economic dispatch has become a hot research topic [
20,
21,
22]. Through building communication lines among the generation units and their neighbors, the distributed economic dispatch collects the essential iteration information and performs the real-time economic dispatch with global optimization. Simulations analyses in [
20] show that the distributed dispatch will greatly cut down communication costs. The distributed gradient algorithm [
21] has ensured the normal process of distributed economic dispatch when the events of units’ over-limits occur. It maintains the connectivity of the communication topology after reconstructing a virtual one. In [
22], with the cost function of energy storage systems non-differentiable, the sub-gradient is used as an alternative of the gradient to implement the non-convex economic dispatch. The algorithms in [
20,
21,
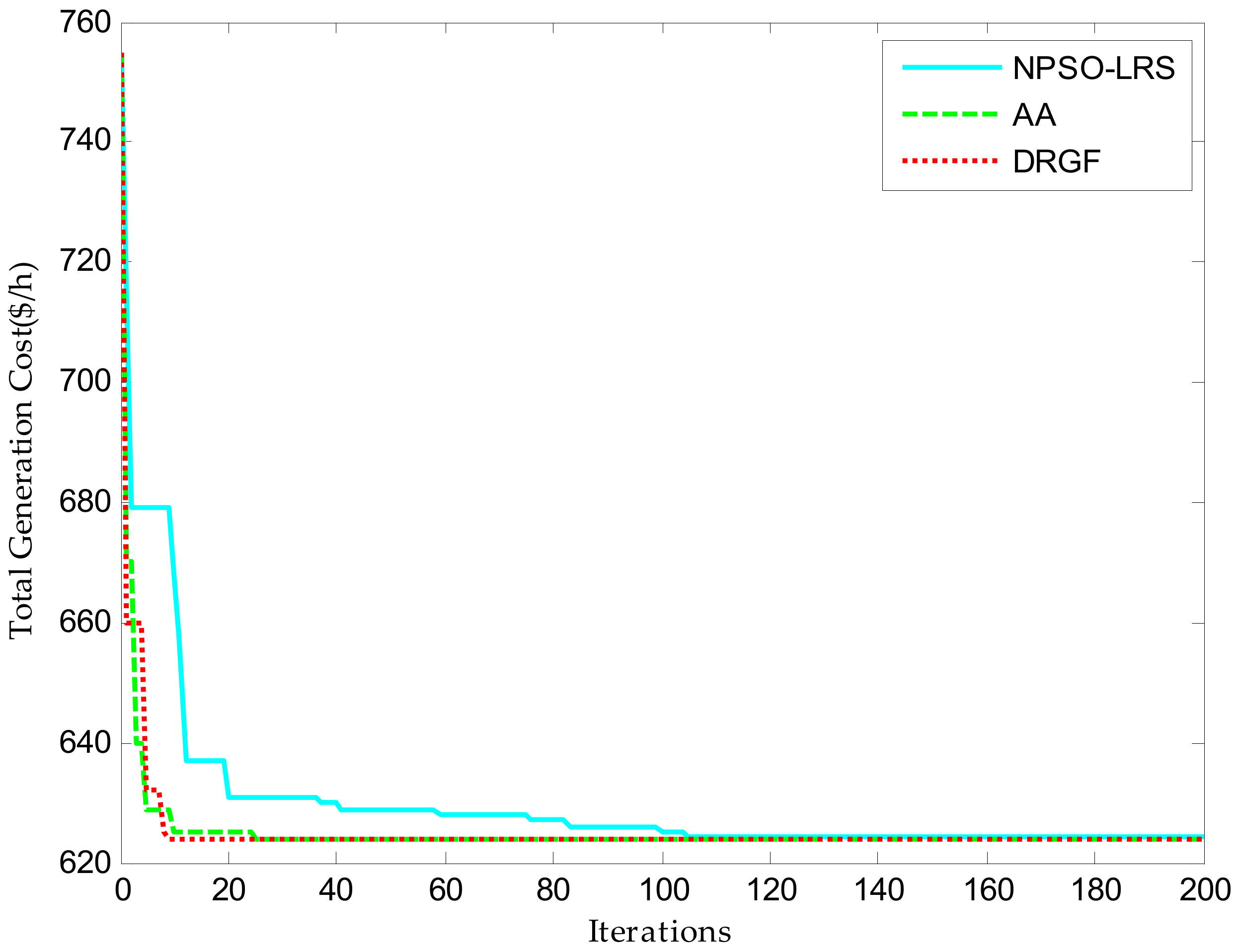
22] are not suitable for solving non-convex optimization problems for difficulties in calculating the cost function’s gradient or sub-gradient. The distributed auction-based algorithm (AA) proposed by [
18] handles these non-convex constraints successfully through sharing bids among network agents and resolving the auction in a consensus procedure. However, it introduces too many intermediate variables, which will make the iteration format complex [
23].
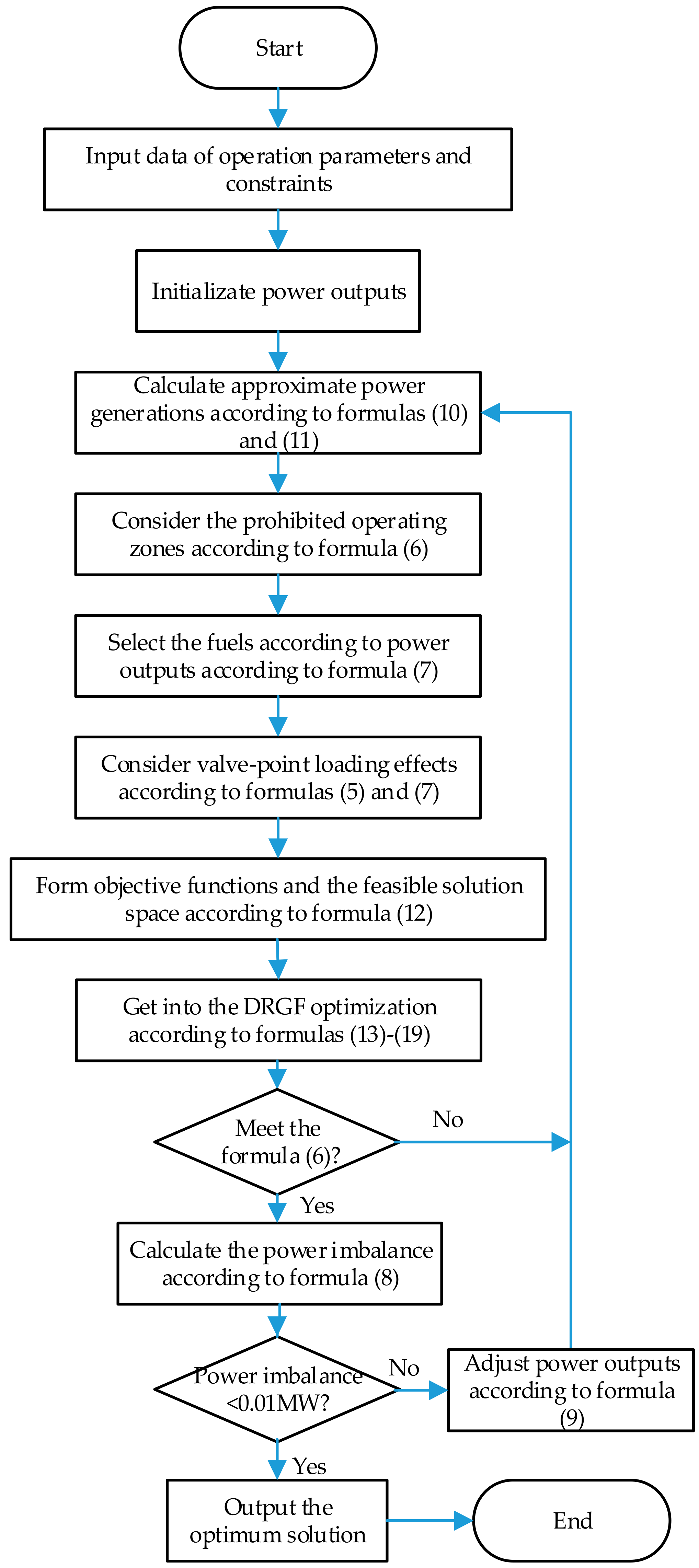
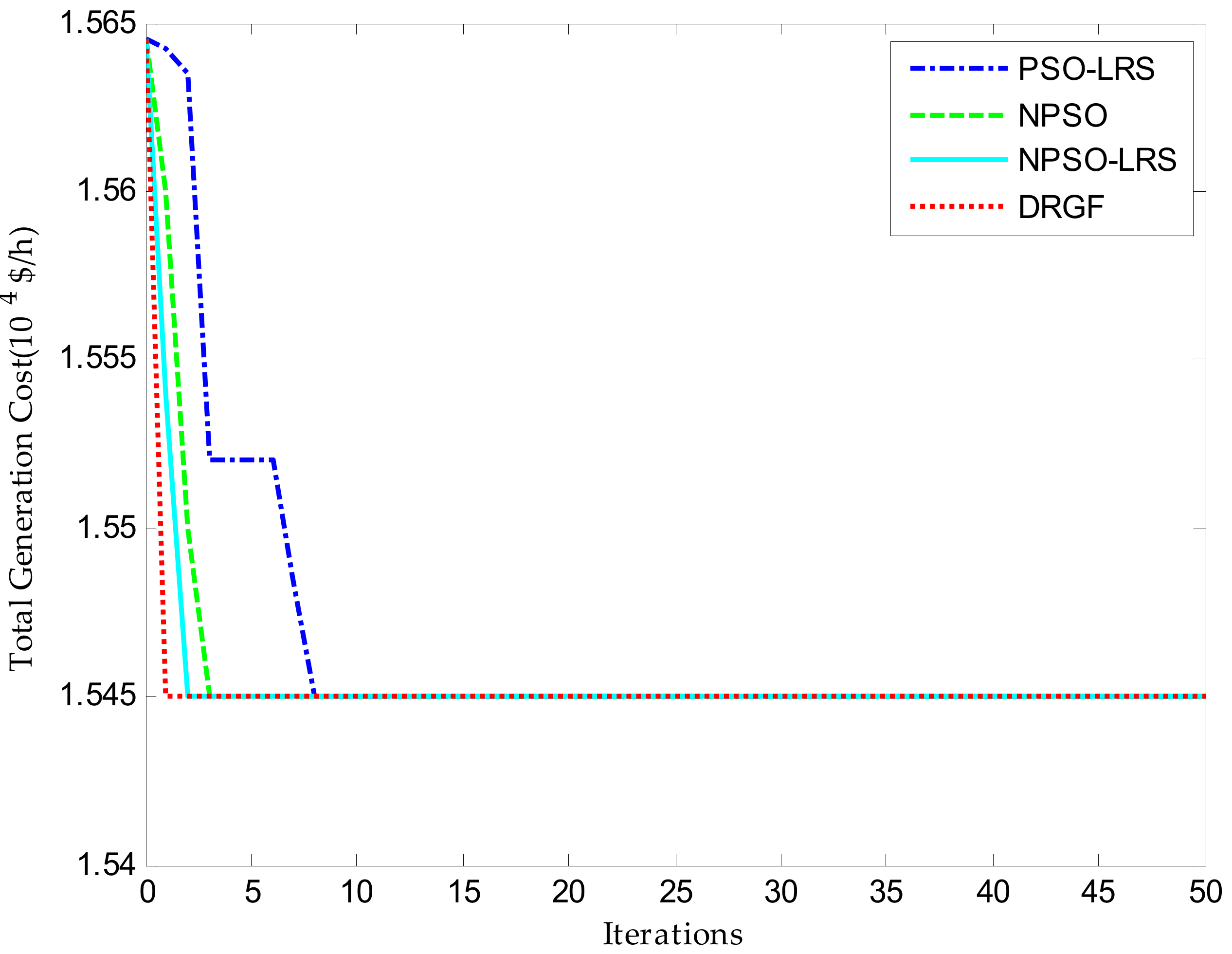
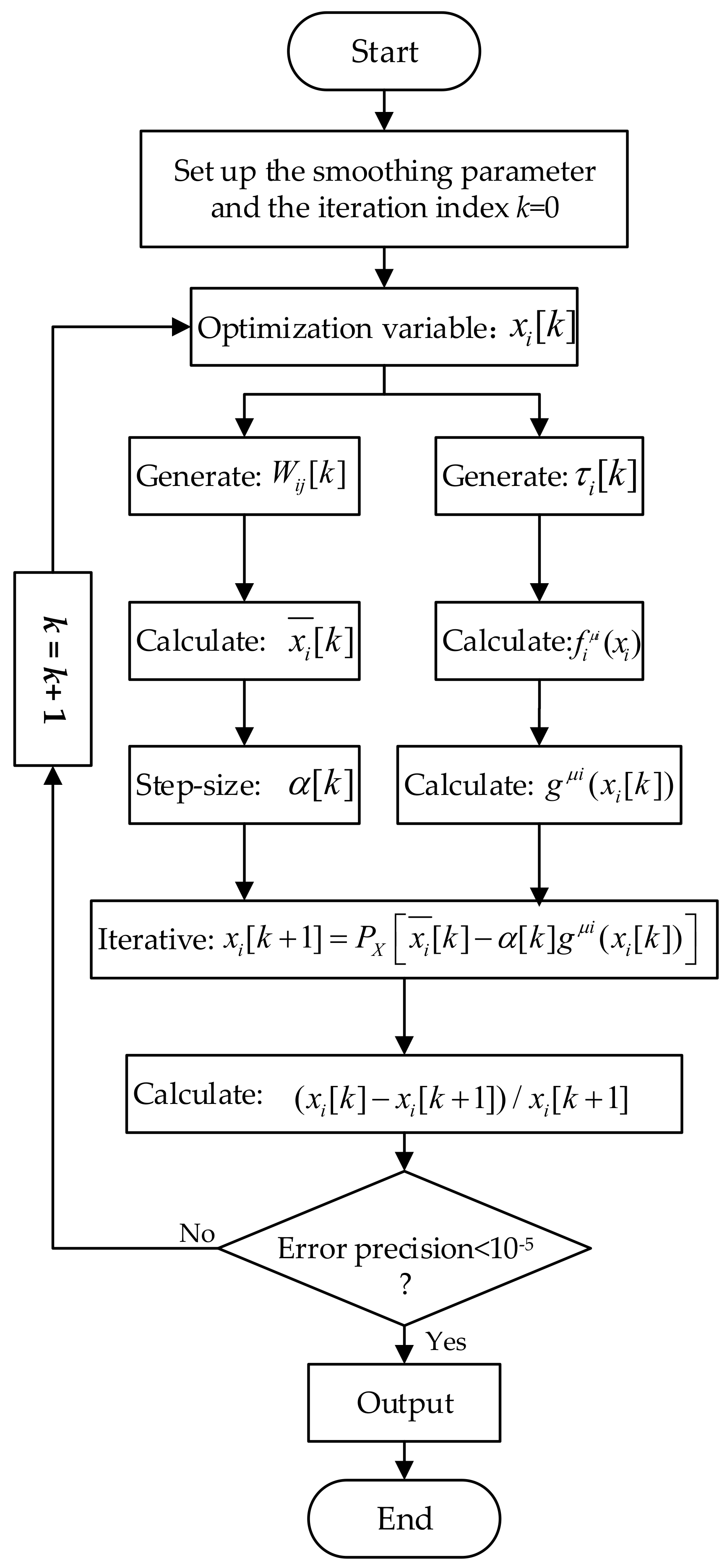
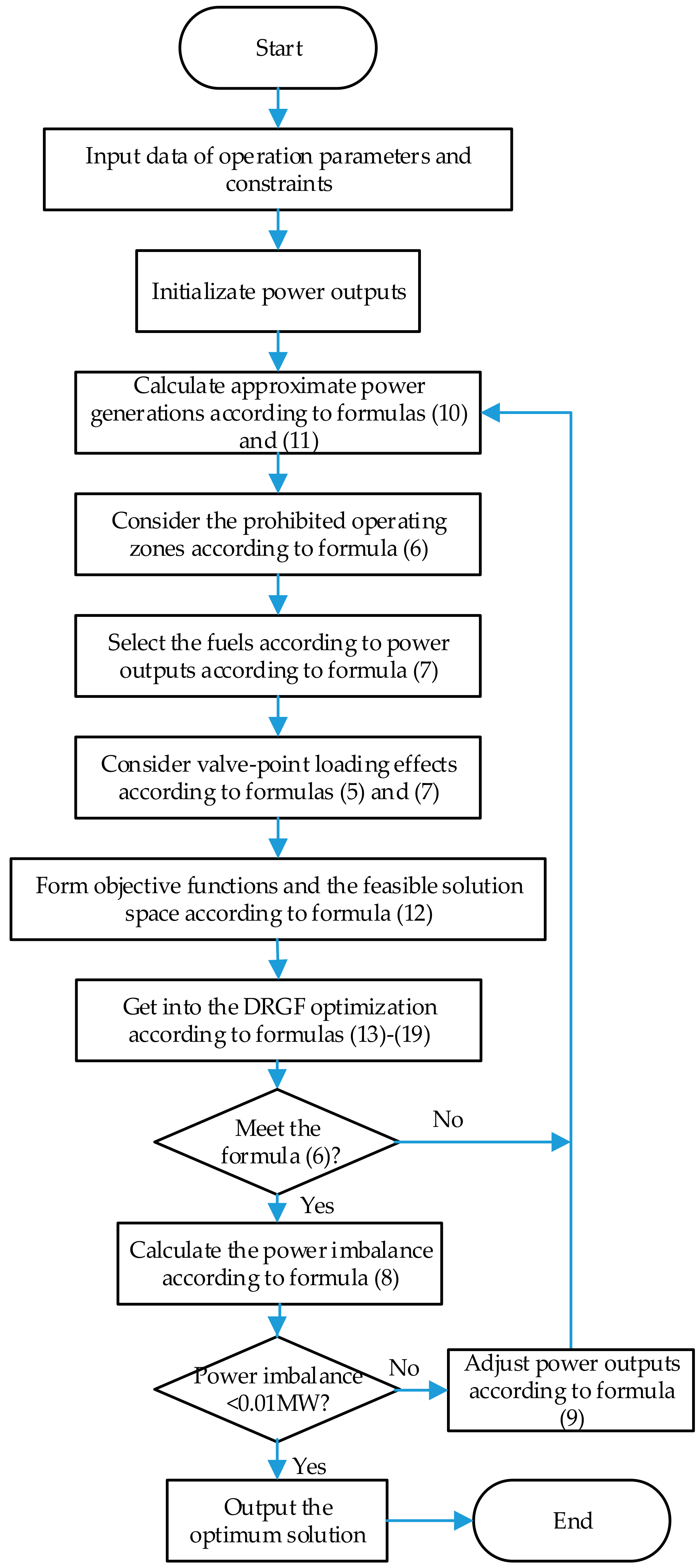
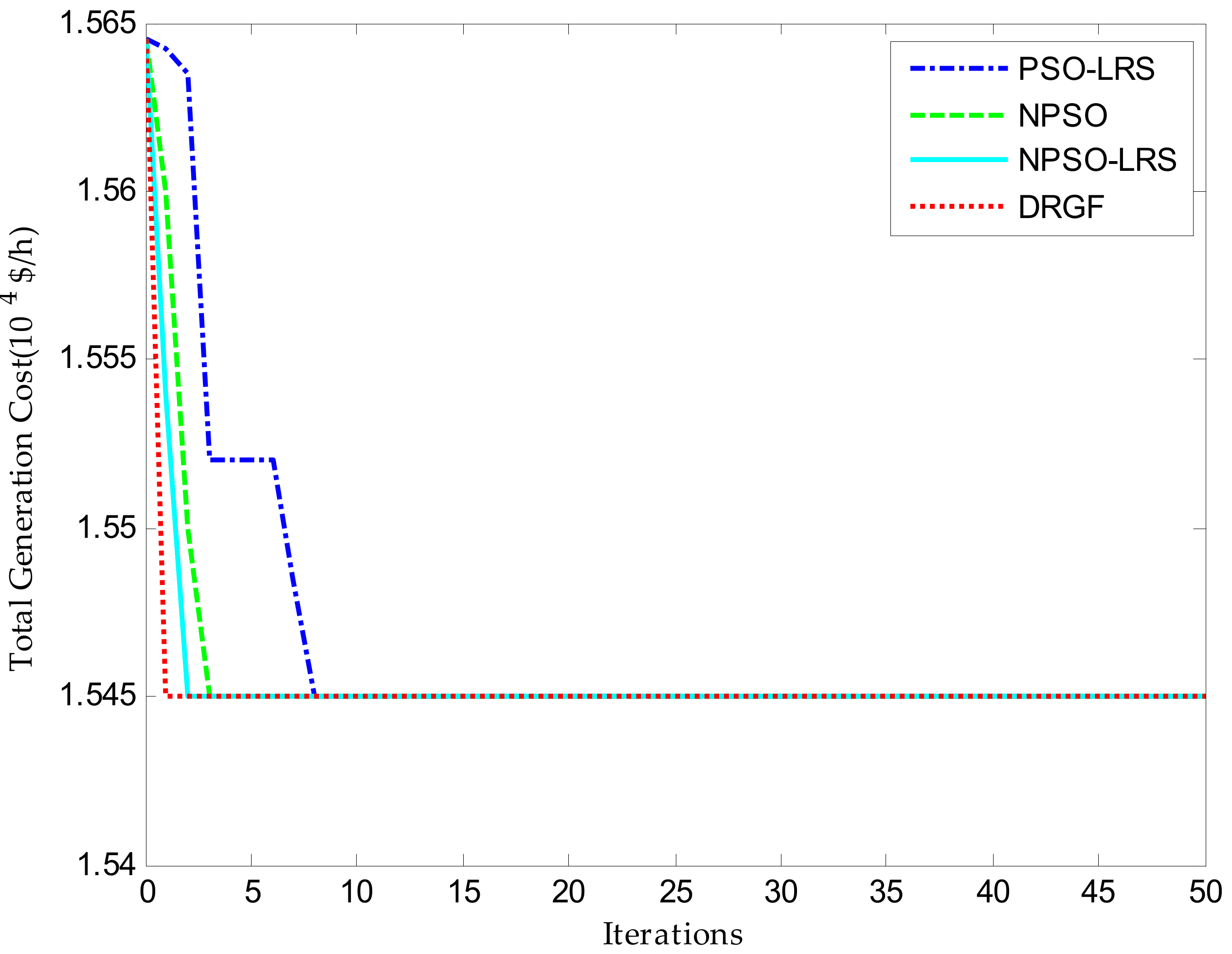
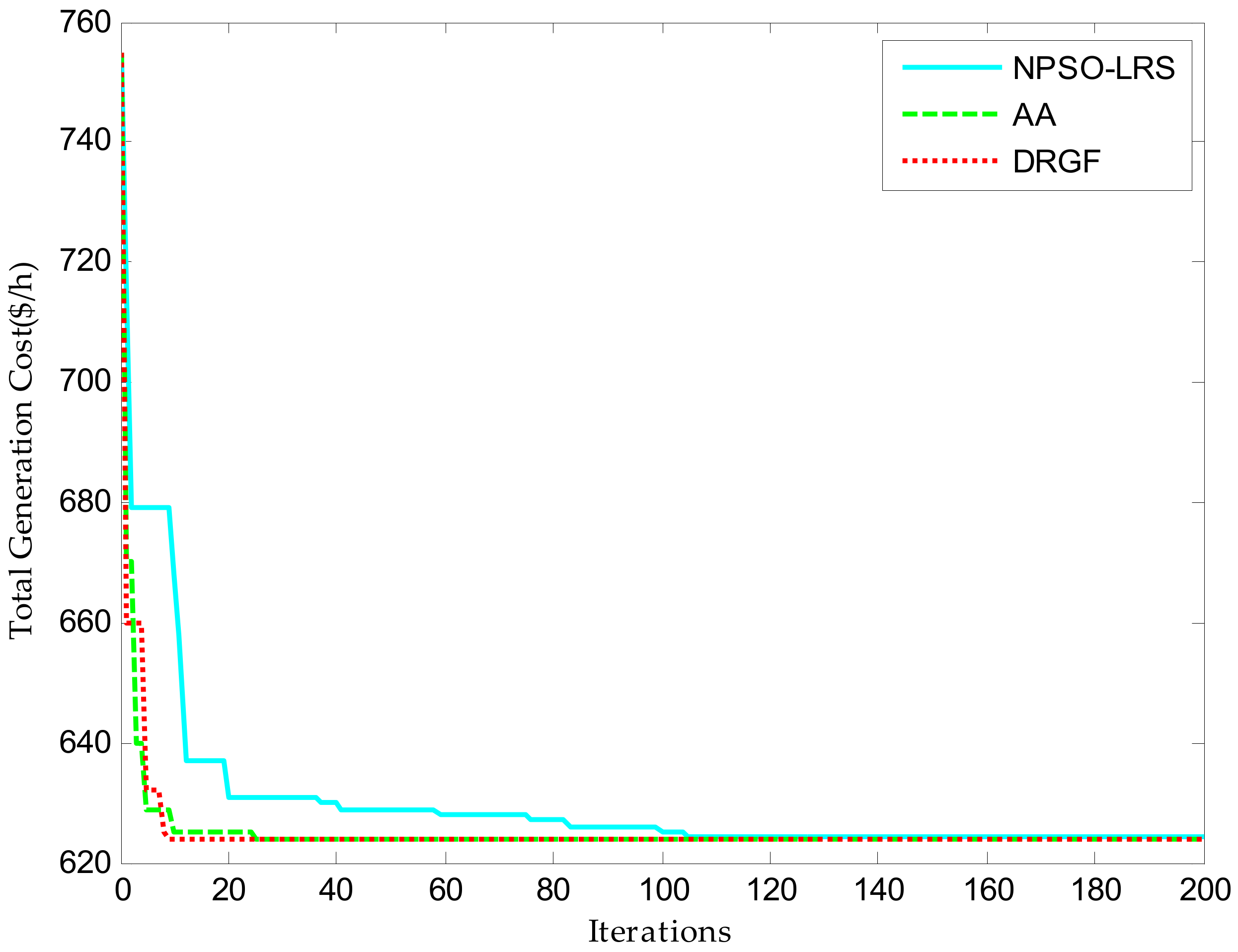
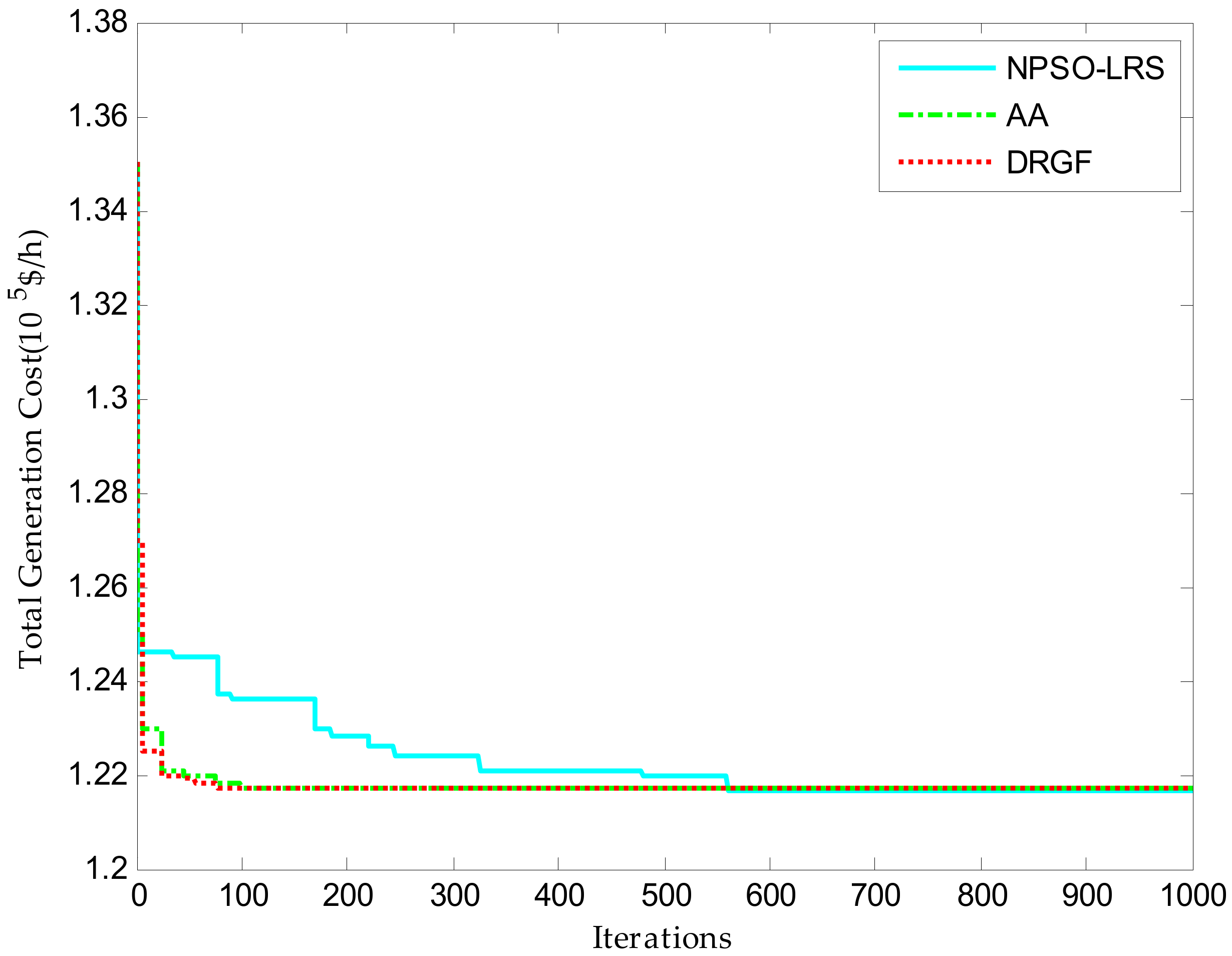
This paper adopts a distributed randomized gradient-free algorithm (DRGF) to solve non-convex economic dispatch problems with considering valve-point loading effects, prohibited operating zones, and multiple fuel options. The algorithm is based on a distributed communication structure which is cheap, reliable, and robust. Its iteration formula is implemented by employing the randomized derivative-free oracles. The effectiveness of the proposed method is verified on three test systems, and the simulation results indicate that the proposed DRGF approach can cope well with non-convex economic dispatch problems.
This paper is organized as follows. In
Section 2, a non-convex economic dispatch with constraints of valve-point loading effects, prohibited operating zones, and multiple fuel options is presented. The DRGF is introduced in
Section 3, and the simulation results presented in
Section 4 show its effectiveness. Finally, the paper is concluded in
Section 5.
2. Non-Convex Economic Dispatch
This paper studies an optimal loads allocation problem within a single time period. Under the premise of satisfying the system’s active power balance constraint and units’ power outputs limits, the total loads can be distributed among all of the units by a most economical scheme.
In conventional economic dispatch, the cost of a thermal generator unit is a quadratic function, and the dispatch center is aimed to minimize the total costs of all generation units.
where
C(
P) represents the total costs of all units whose total number is
n;
Pi is the power outputs of unit
i and
Ci(
Pi) is the production cost. The production characteristic coefficients are
ai,
bi, and
ci.
If the ramp rate limits are considered, the power outputs limits can be expressed as [
10]
where
is the previous power output, the upper and lower power output limits are
respectively, and
DRi and
UPi are the down and up ramp limits, respectively.
The system must meet the active power balance constraints.
where
Pd is the total load demand. The network losses of the system are
Ploss calculated by the Kron formula [
18].
where
Bij,
B0,i, and
B00 are the losses coefficients.
(a) Valve-point loading effects. To formulate the valve-point loading effects, a sinusoidal term is added to the original cost function [
5]
where
di,
ei are the valve-point loading coefficients of unit
i.
(b) Prohibited operating zones. Considering this constraint can ensure the stable operation of generation units. Therefore, the units’ power outputs constraints will be modified as follows [
9]:
where
Lm,i and
Um,i are the lower and upper boundaries of prohibited operating zone
m of unit
i, respectively. The number of prohibited operating zones of unit
i is
Mi.
(c) Multiple fuel options. Since units are practically provided with multiple fuel sources, each unit selects the most economical fuel in different operation range. When considering multiple fuel options, the cost function of unit
i with valve-point loading effects is formulated as [
10]
where
are the cost coefficients of unit
i under fuel
q.
P(q−1),i is the lower power outputs limit when the fuel
q is in use.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}