1. Introduction
Gear trains (GTs) have been widely used. However, since GTs are quite complex and subjective to design, many GTs are over-designed in terms of the working requirements. Therefore, mainly for better performance or lower cost, gear train optimizations (GTOs) are rather necessary.
Such optimizations are difficult for three main reasons. First, numerous guiding equations, graphs and tables have to be referenced. Second, several key design parameters, for example tooth numbers and moduli, are discrete. Third, some constraints, for example the constraints for bending fatigue and pitting fatigue, are nonlinear. Therefore, although many attempts have been made, GTOs are still developing.
Some GTOs largely depend on algebraic equation derivations or graphical methods. White and Sanger [
1] deduced the gear size ratio expressions for a nine-speed GT based on the constraints of mesh conditions and speed ratios. The corresponding graphs of the expressions were used to reveal some typical design points for different optimization purposes. Based on the same constraints, Osman et al. [
2] deduced some of the gear size ratio expressions in another way, discovering that only three independent gear size ratios needed to be determined in the nine-speed GTO. Considering more constraints such as that of kinematics and tooth strength, Savage et al. [
3] presented feasible design regions graphically for standard involute spur gear sets. They found the optimal designs mainly by analyzing the feasible region graphs. Similarly, Carroll and Johnson [
4] formulated a dimensionless optimization model for spur gear sets and then investigated the optima mainly by referencing to dimensionless feasible region graphs. To explore the relationship between problem formulations and solution algorithms, Pomrehn and Papalambros [
5] formulated the discrete nonlinear optimization problem for a four-stage spur GT in three equivalent ways, each of which required a different type of algorithms. In a sequel article [
6], one of such problem formulations was further reformulated, allowing performing a series of infeasibility and non-optimality tests to significantly reduce the solution space of the problem. However, algebraic equation derivations or graphical methods proposed in those studies [
1,
2,
3,
4,
5,
6] are numerically indirect, which could become rather complex, inefficient and impractical for GTOs when the number of constraints or design variables is large.
Direct numerical methods are demanded for GTOs. Rao and Eslampour [
7] presented a two-stage goal programming approach for the multi-objective optimization of multi-stage and multi-speed gearboxes. The kinematic design was first performed and then the strength design. Marjanovic et al. [
8] proposed a two-stage optimization procedure for spur GTs. The GT concept was first optimized and then the parameters. Swantner and Campbell [
9] proposed a three-stage optimization procedure for GTs consisting of simple, compound, bevel and worm gears. The topology, the gear specifications and the gear locations of the GT, respectively, were optimized at the three stages executed iteratively. However, one part of the whole optimization problem might be dependent on the others to some extent. Therefore, the multi-stage optimization methods for the GTOs in those studies [
7,
8,
9] might lead to local optima, which might be unsatisfying.
To obtain satisfying solutions, some GTOs involve the interaction between the designer and the optimization procedure. Wang and Wang [
10] developed an interactive multi-objective design environment for spur gear set optimizations. Huang et al. [
11] proposed an interactive physical programming approach for the multi-objective optimization of a three-stage GT. In those studies [
10,
11], the optimization processes were directed interactively according to the designer’s preferences on design objectives. However, such interactive frameworks [
10,
11] for GTOs require that the designer should monitor the execution of the optimization program till a satisfying solution is obtained, which might be relatively tiring especially when the running time is long.
To obtain satisfying optima without much manual intervention, random methods are adopted in some GTOs. Zarefar and Muthukrishman [
12] developed a modified adaptive random-search algorithm to optimize a helical gear set. Each combination of a starting solution and a search direction, both randomly generated, was tried based on adaptive step sizes to obtain a feasible solution approaching to the constrained boundary, thus iteratively forming a feasible set. Then, the optimum was obtained within the feasible set by direct comparison of objective function values. Thompson et al. [
13] presented an optimization tradeoff analysis method for multi-stage spur GTs. The multi-objective problem was formulated as a weighted-sum problem. Systematic variations of all the weightings produced a Pareto optimum set to be plotted and analyzed for discovering the satisfying optimum. Osyczka [
14] developed a multi-objective optimization approach based on the Min-Max Principle of Optimality (MMPO) and applied the approach to the automatic design of gearboxes. The solutions for comparison in the min-max sense were randomly generated using the Monte Carlo method or the trade-off studies. Abuid and Ameen [
15] proposed a two-stage procedure for accurately minimizing seven criteria of a two-stage spur GT. First, rough optimal solutions were obtained with the random mesh method and the MMPO. Then, to be more accurate, the rough optimal solutions were refined with the direct min-max search method. However, whether the outputs of the random methods in those studies [
12,
13,
14,
15] are satisfying greatly depends on the numbers of random trials. Therefore, the efficiencies of those methods might decrease in solving problems of large dimensions for satisfying optima.
In addition, advanced stochastic methods such as the genetic algorithms (GAs), the simulated annealing algorithms (SAAs) and the particle swarm optimization algorithms (PSOAs) are intensively used in some GTOs mainly because these methods can handle various types of design variables, objectives and constraints easily, requiring no information of functional derivatives. Yokota et al. [
16] optimized the weight of a gear set with an improved GA. Marcelin [
17] proposed a GA combined with a penalty selection method to optimize gear pairs. Mendi et al. [
18] used a GA with a static penalty function incorporated in the fitness function to minimize the volume of a single-stage gearbox. Gologlu and Zeyveli [
19] utilized a GA to minimize the total volume of a two-stage GT, with static and dynamic penalty function methods implemented to handle constraints. They found that the solutions from the implementation of the dynamic penalty function method were generally better than those from the implementation of the static one. Deb et al. [
20] proposed an elitist non-dominated sorting GA to minimize the gear ratio error and the maximum tooth number of a two-stage GT. Deb and Jain [
21] implemented the same algorithm to an eighteen-speed gearbox to maximize the power transmitted and minimize the total gear volume. The algorithm generated a set of well-distributed solutions in one single simulation run, providing an opportunity to discover some important design principles. Chong et al. [
22] proposed a generalized methodology incorporated an SAA to preliminarily design basic gear parameters and configurations to globally minimize the total volumes of multi-stage GTs. Savsani et al. [
23] applied a GA, an SAA and a PSOA to minimize the weight of a spur gear set. The results showed that the PSOA and the SAA were more effective and efficient than the GA. However, numerous trials, especially for inexperienced designers, might have to be performed to appropriately determine several parameters for the advanced stochastic methods used in those studies [
16,
17,
18,
19,
20,
21,
22,
23] since the efficacies of those methods significantly depend on such parameters. Thus, such a requirement might actually increase the total times for those methods to obtain global optima.
The authors propose an enumerative optimization procedure (EOP) incorporating the MMPO to directly and globally optimize the GT of a two-speed dedicated electric transmission (2DET) for electric vehicles (EVs). The enumeration technique is preferred to the random methods [
12,
13,
14,
15] and the advanced stochastic methods [
16,
17,
18,
19,
20,
21,
22,
23] because the number of the possible solutions to the 2DET could be well limited considering practical manufacturing requirements and a high-performance computer could scan and evaluate all the candidates efficiently. In addition, multiple criteria are simultaneously optimized for the 2DET using the MMPO to find global optima since the MMPO could well represent the real optimization purposes of designers in an intuitive, reasonable and comprehensive way.
The following presents the EOP in detail, illustrated by the GTO of the 2DET.
Section 2 introduces the optimization problem of the GT of the 2DET.
Section 3 evaluates the constraints in a dedicated order, determining the feasible region of the problem gradually.
Section 4 implements the MMPO to the feasible region. Then, the optimization results are displayed and discussed in
Section 5.
Section 6 concludes the presented work.
3. Enumeration
Enumeration is direct and practical for determining the feasible regions of the problems with a limited number of possible solutions. The number of the possible solutions of the GTOP is well limited not only because the tooth numbers must be integers and should not be too large or too small but also because the moduli should belong to discrete and limited standard series. Therefore, before the optimal design solutions are obtained, all the candidates are enumerated and evaluated here within the following scopes to determine the feasible region of the GTOP,
where
,
,…, and
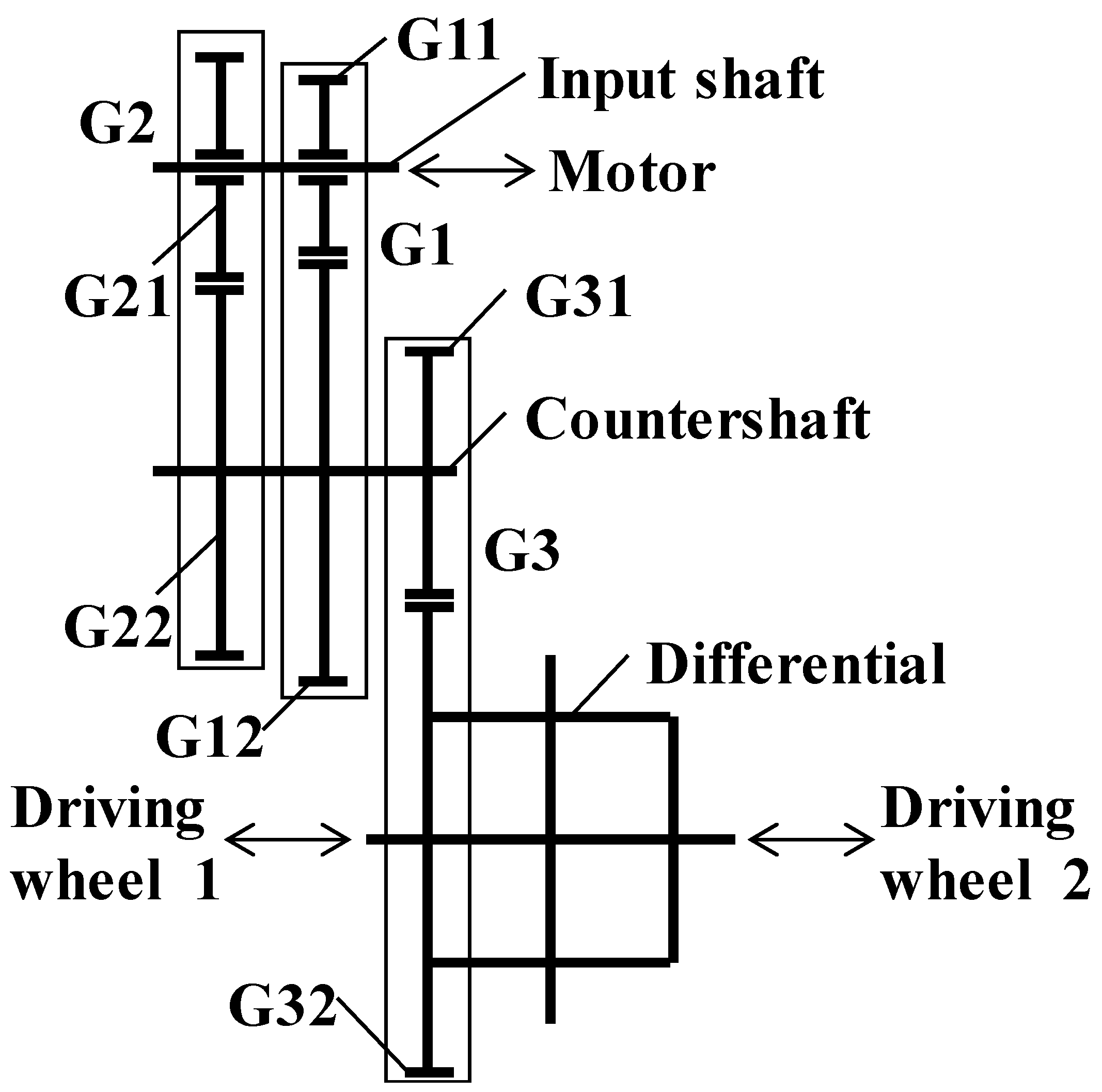
are all the design variables of the GTOP;
,
,…, and
, respectively, the tooth numbers of G11, G12, G21, G22, G31 and G32;
the common modulus of G1 and G2;
the modulus of G3;
the scope of
,
,…, and
; and
and
, respectively, the scopes of
and
. Such scopes are established mainly based on engineering experience. According to these scopes, the total number of the possible solutions can be up to
Because of such an enormous quantity of the possible solutions, the evaluation of each possible solution with all the constraints can be impractical. Therefore, the enumeration procedure is elaborated in the following order.
3.1. Tooth Numbers of a Gear Pair
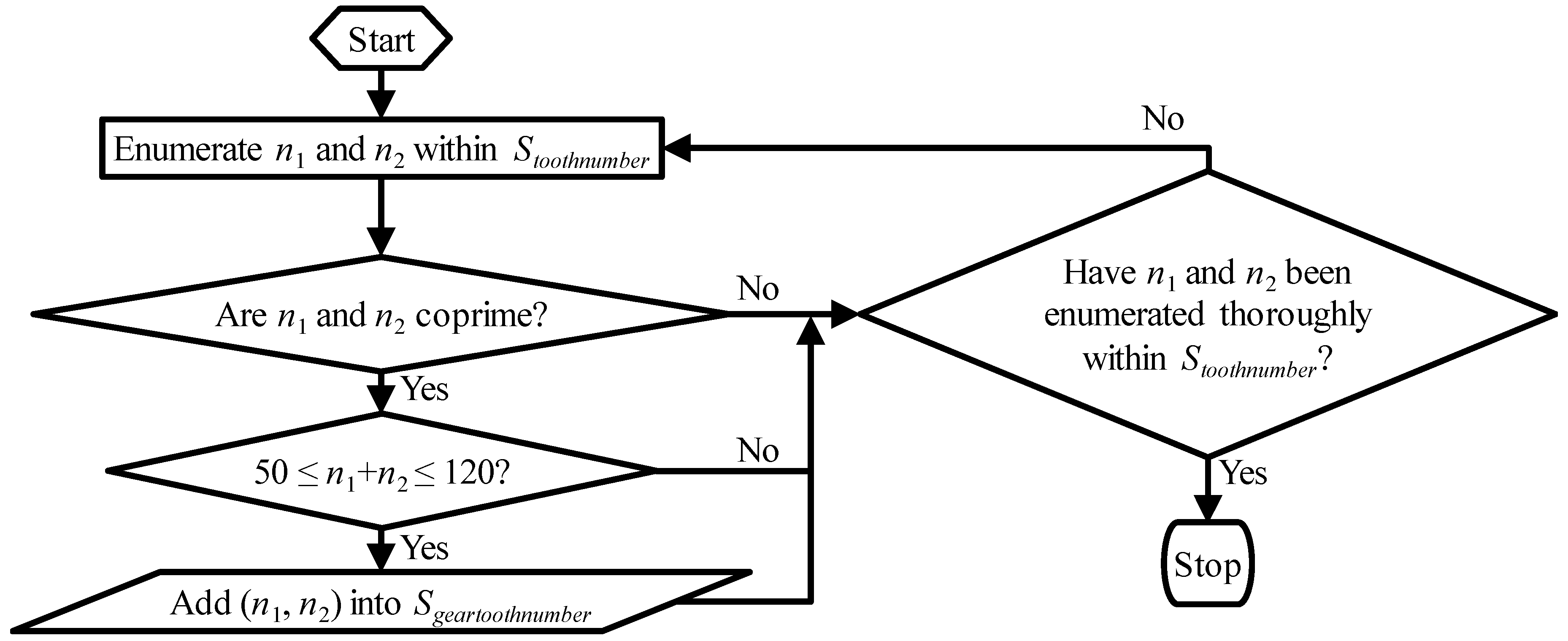
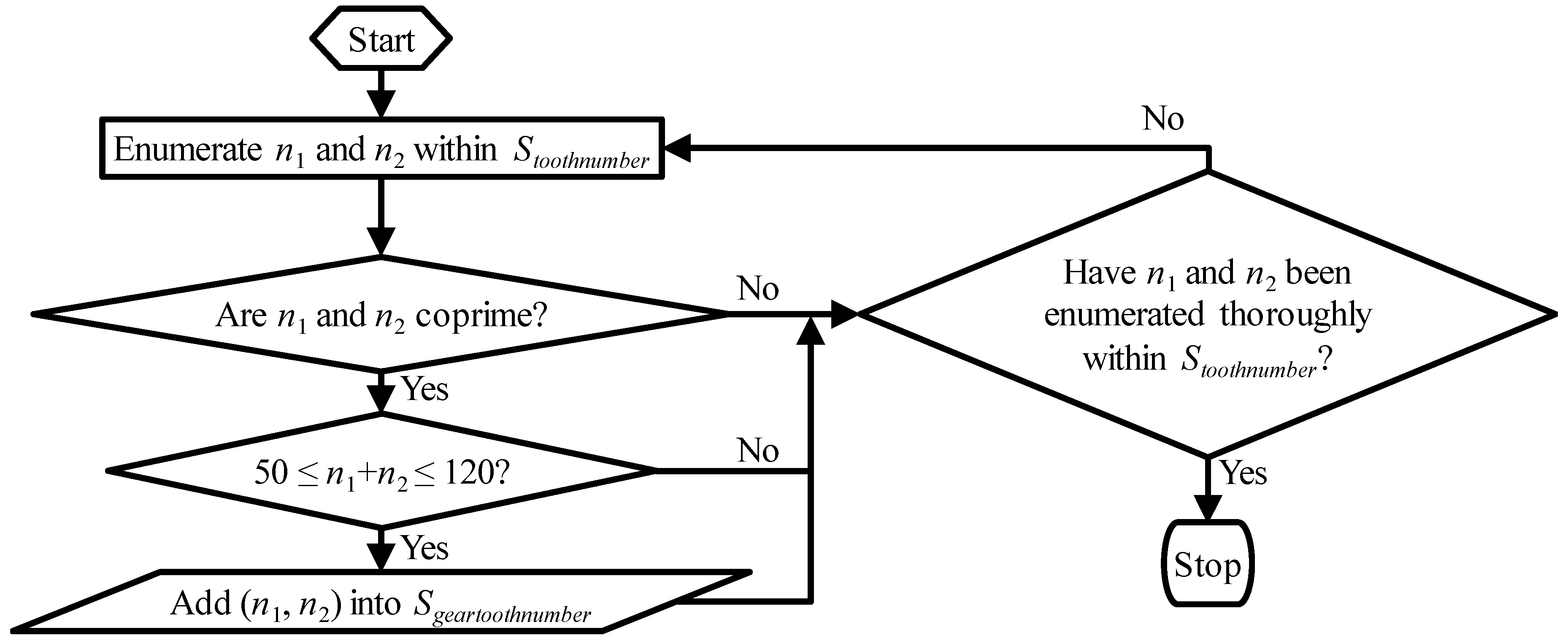
The tooth numbers of a gear pair are preferred to be coprime for the uniform abrasion of the gear pair. Furthermore, the tooth number sum of a gear pair in a vehicle automatic transmission is preferred to be not less than 50 [
24] and not larger than 120 [
25]. Thus,
, the set of the feasible tooth number combinations of a gear pair, can be expressed as
where
and
are the tooth numbers of a gear pair; and
means
and
are coprime.
Figure 2 shows the scheme of the enumeration for the tooth numbers of a gear pair.
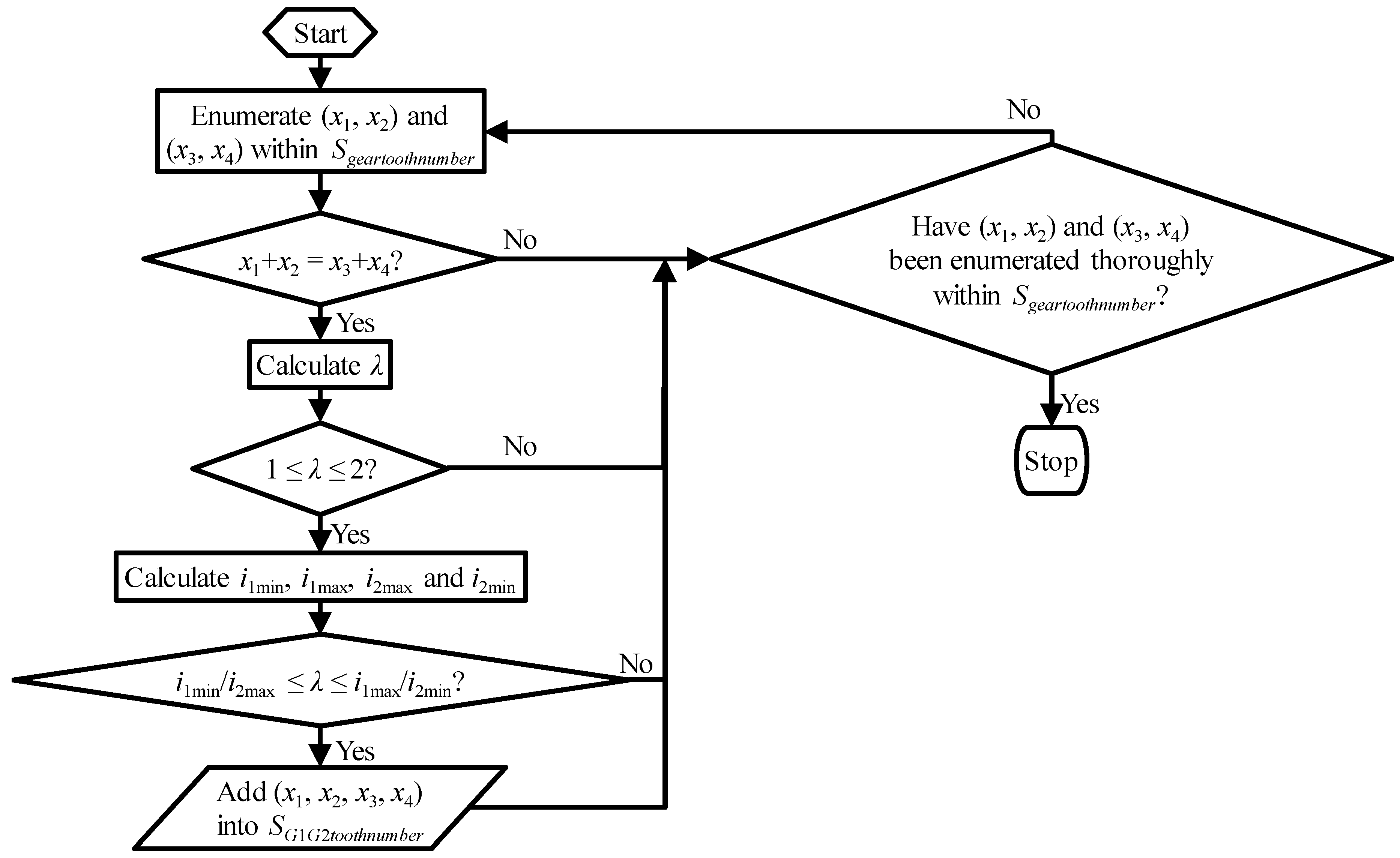
3.2. Tooth Numbers of G1 and G2
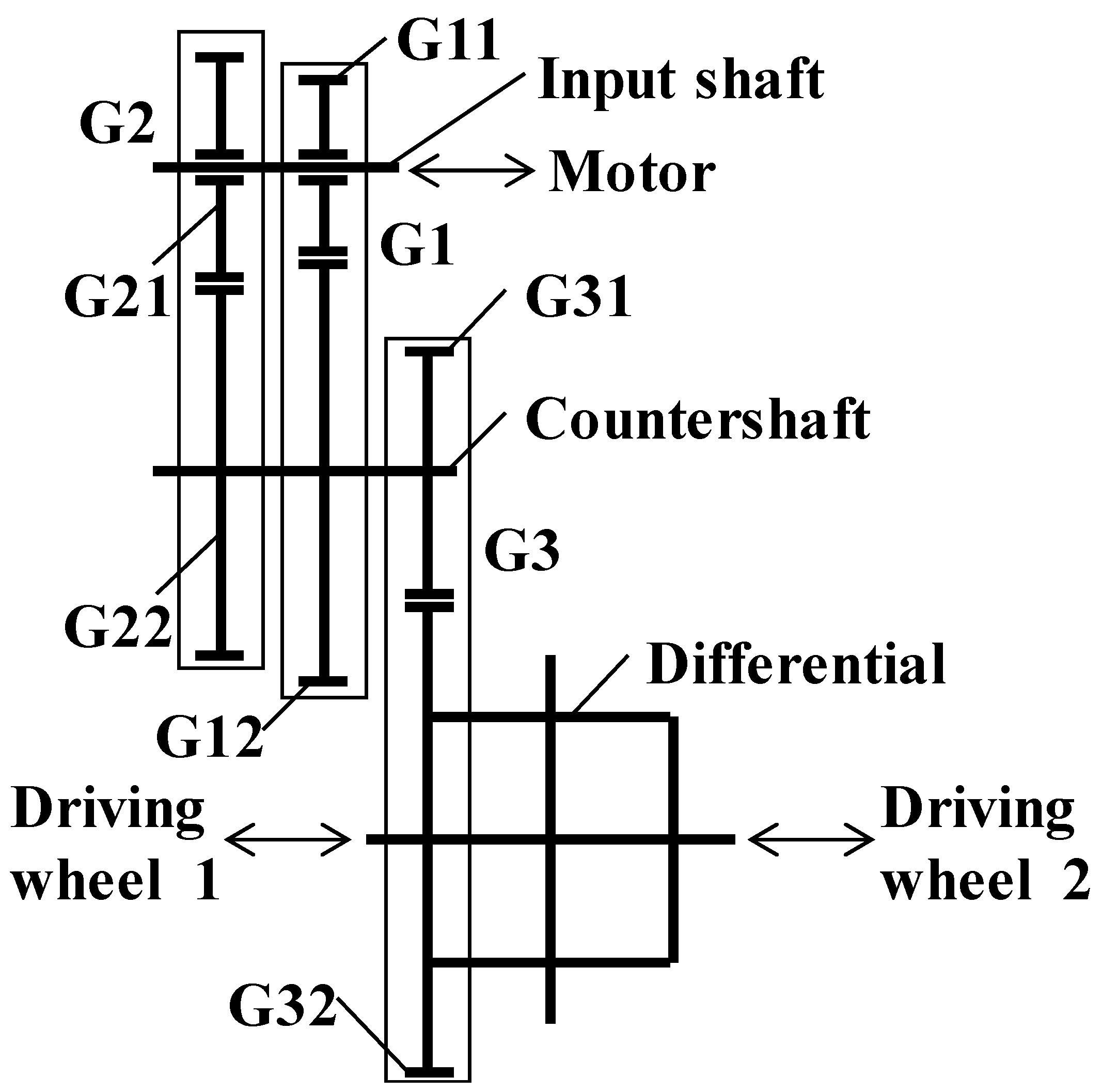
The following equations show that the gear step ratio
only depends on the tooth numbers of G1 and G2,
where
,
and
are, respectively, the gear ratios of G1, G2 and G3; and
and
, respectively, the first and the second gear ratio. Therefore, the scope of
can be a constraint for the tooth numbers of G1 and G2. Obviously,
should be greater than
, which means
Furthermore, investigating the scopes of
and
can provide additional lower and upper limits of
. The climbing ability of the EV requires that
where
is the maximum motor torque,
the sign function,
the vehicle climbing velocity (specified according to GB/T 18385-2005 [
26]),
the rolling resistance coefficient,
the required maximum ramp gradient,
the gross mass of the EV,
the acceleration of gravity,
the air drag coefficient,
the air density,
the front area,
the air velocity, and
the wheel radius. Therefore,
, the minimum of
, can be obtained by
The adhesion limit of the front-wheel-drive EV requires that
where
is the adhesion coefficient and
the front axle laden mass. Therefore,
, the maximum of
, can be obtained by
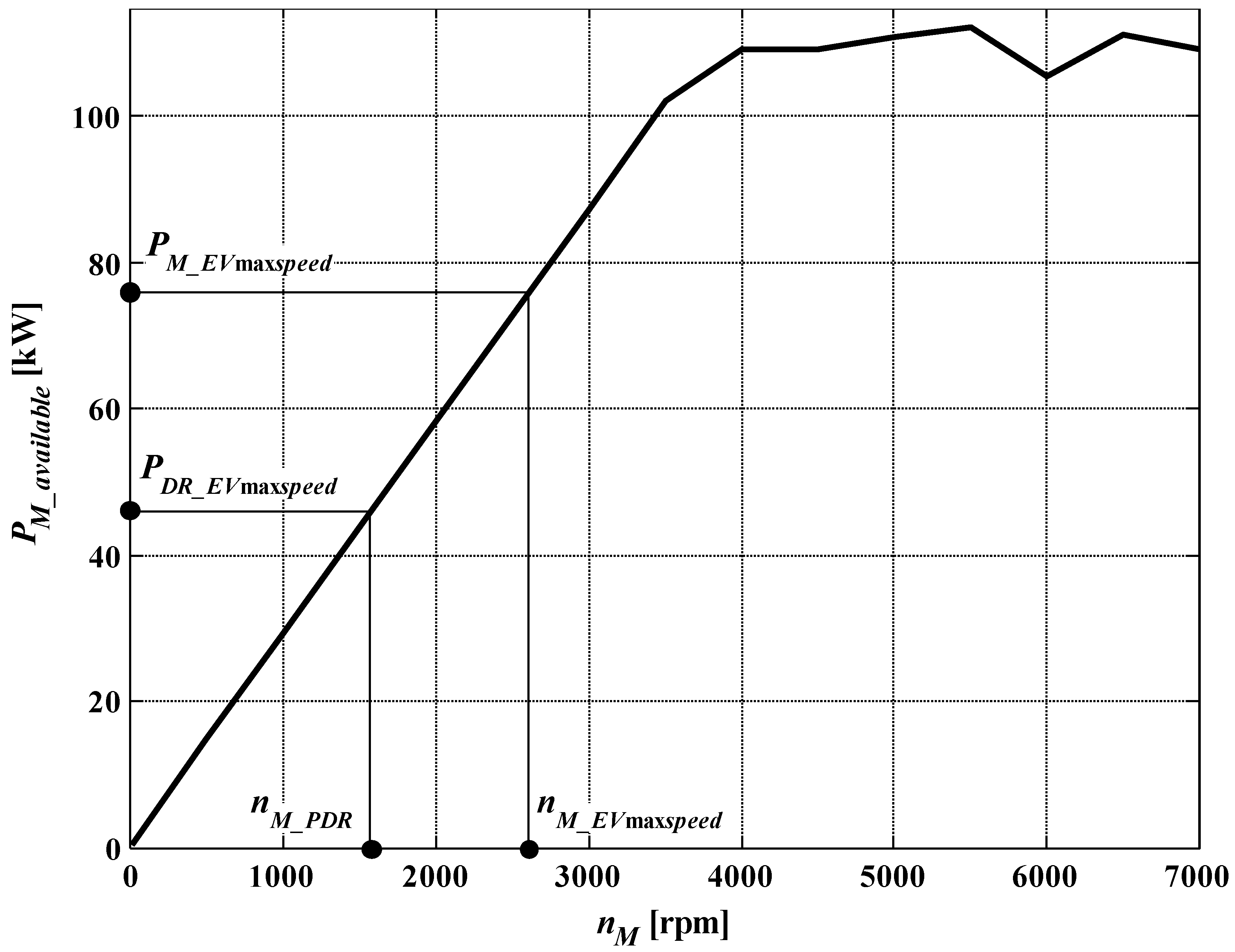
To achieve the required maximum vehicle speed
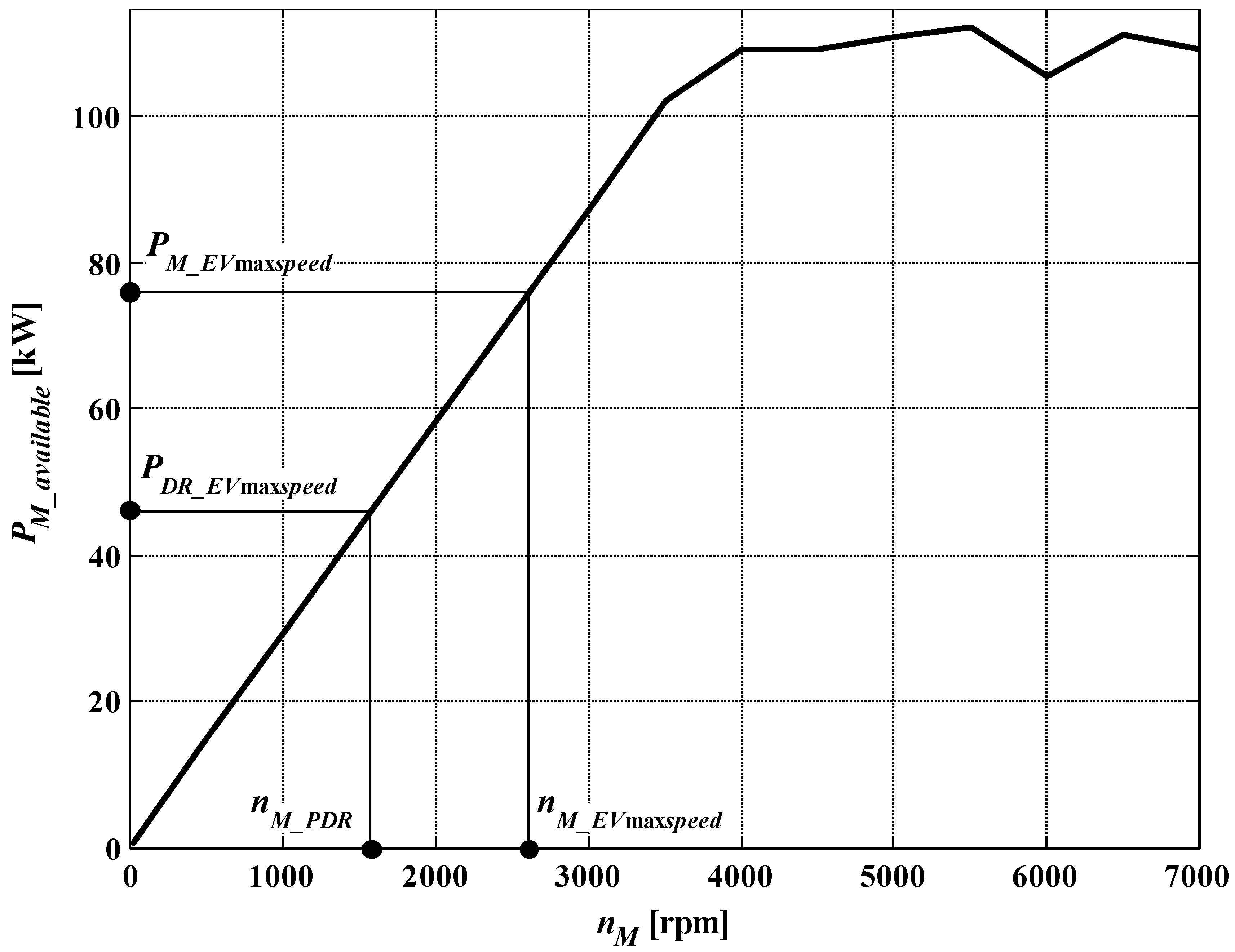
at the second gear, the following conditions should be met:
where
is the maximum motor speed,
the available motor power at
, and
the driving resistance power of the EV at
.
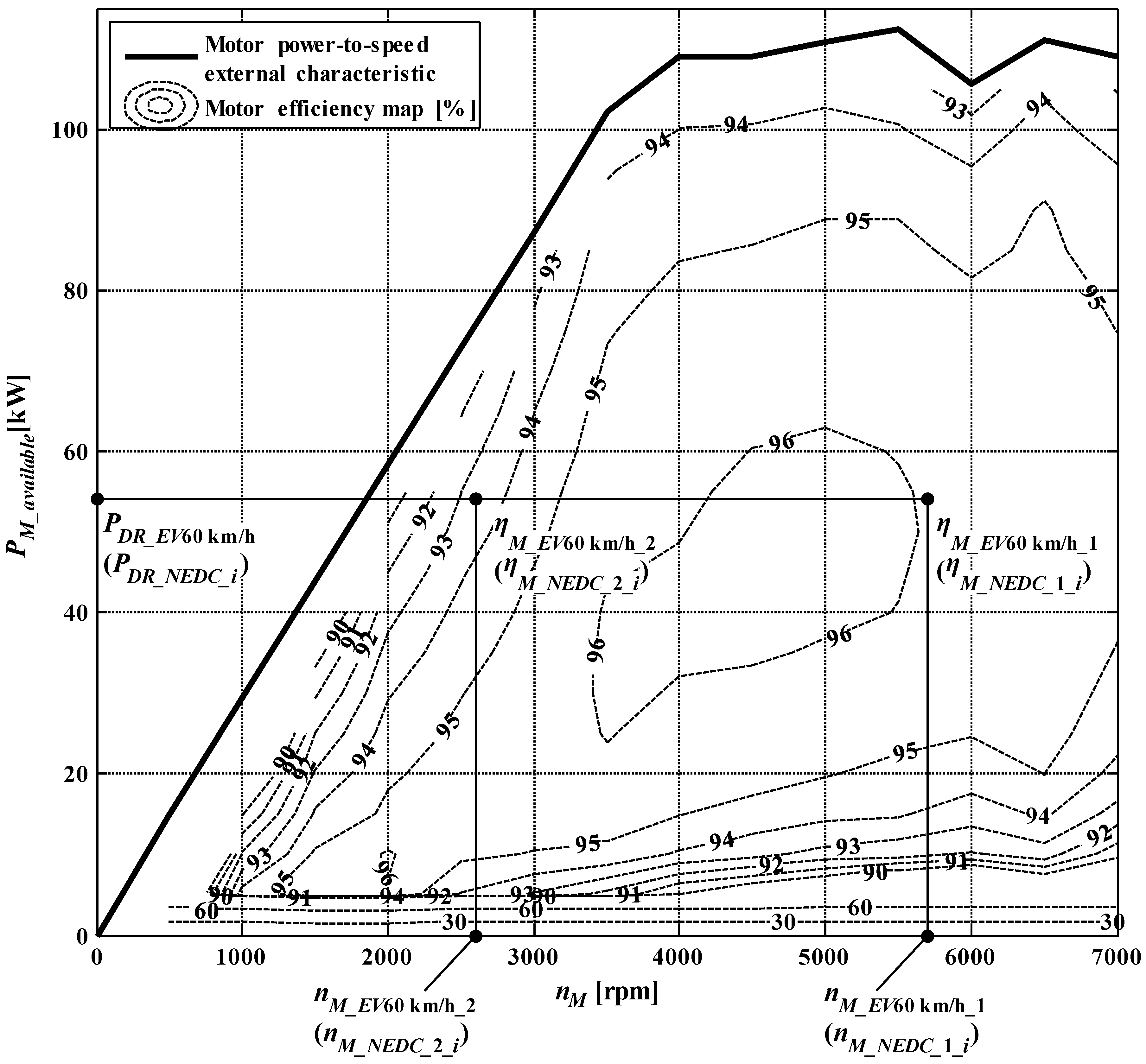
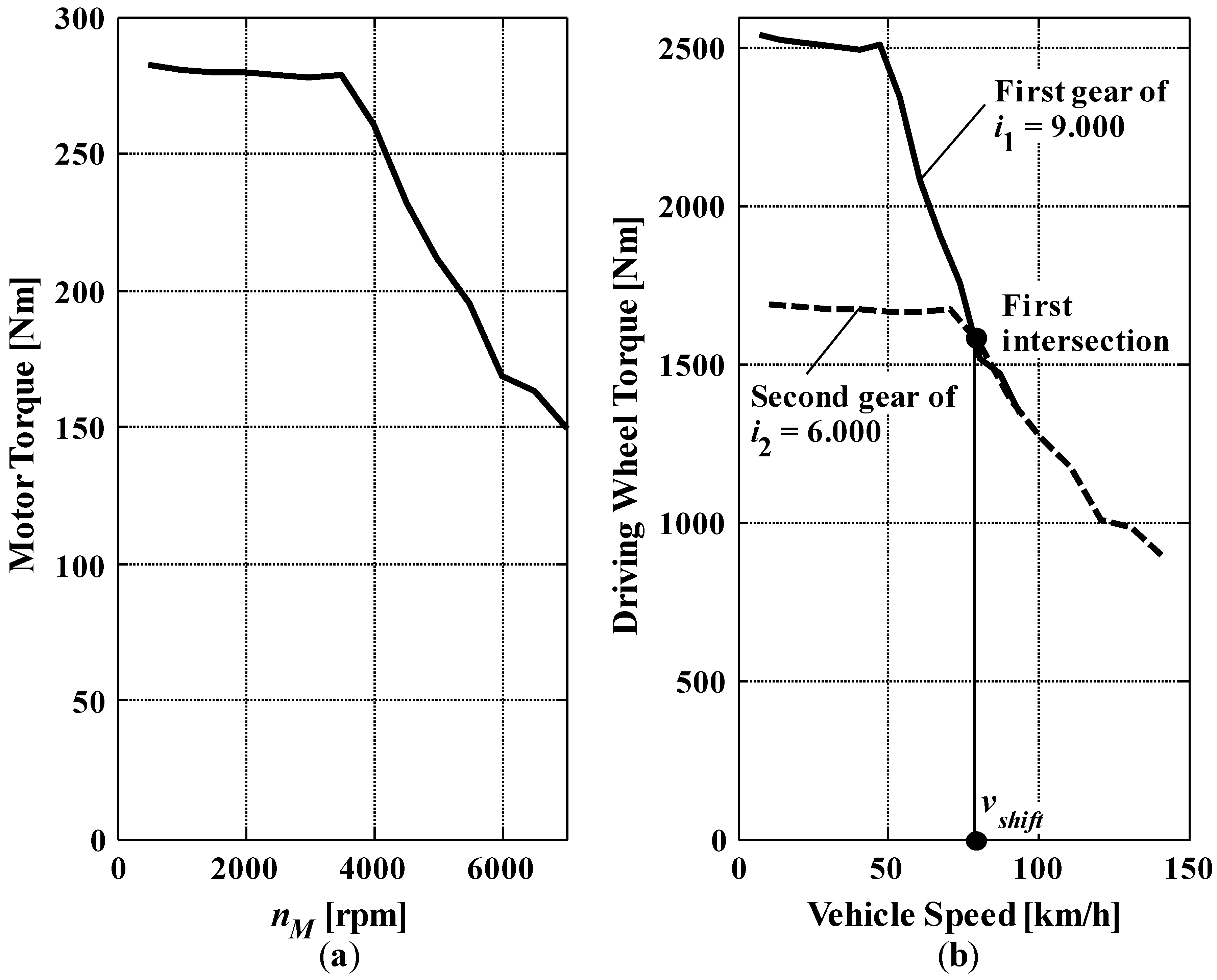
Figure 3 shows the relationship between the available motor power
and the motor speed
. Based on such relationship,
where
is the motor speed corresponding to
and
can be calculated by
The motor speed where
is defined as
and calculated by interpolation. According to
Figure 3, Equation (16) leads to
Therefore, according to Equations (15), (18) and (21),
where
and
are, respectively, the maximum and minimum of
.
Moreover, according to the assumptions made in
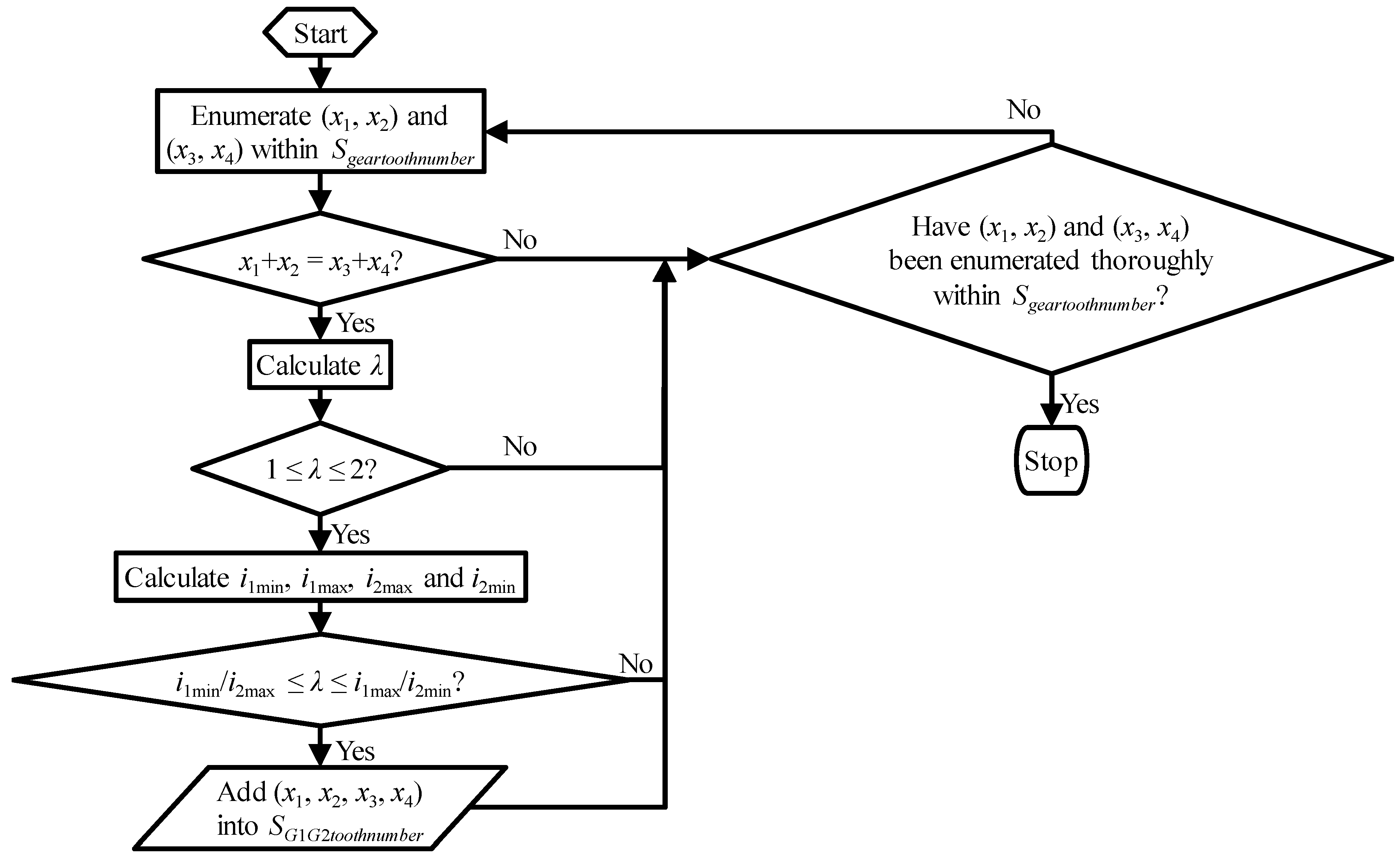
Section 2, the tooth number sums of G1 and G2 should be the same, which means
Therefore,
, the set of feasible tooth number combinations of G1 and G2, can be expressed as
Figure 4 shows the scheme of the enumeration for the tooth numbers of G1 and G2.
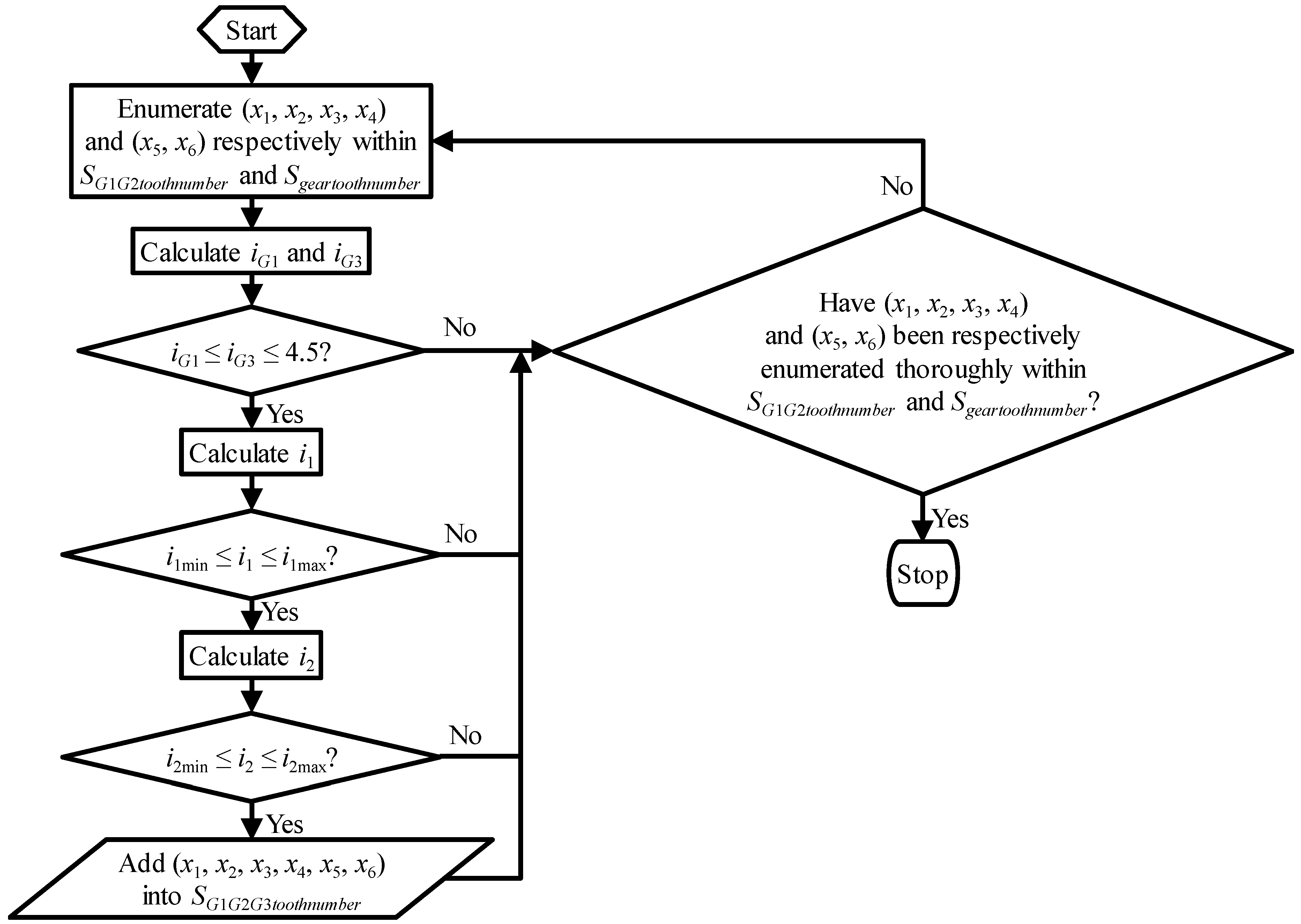
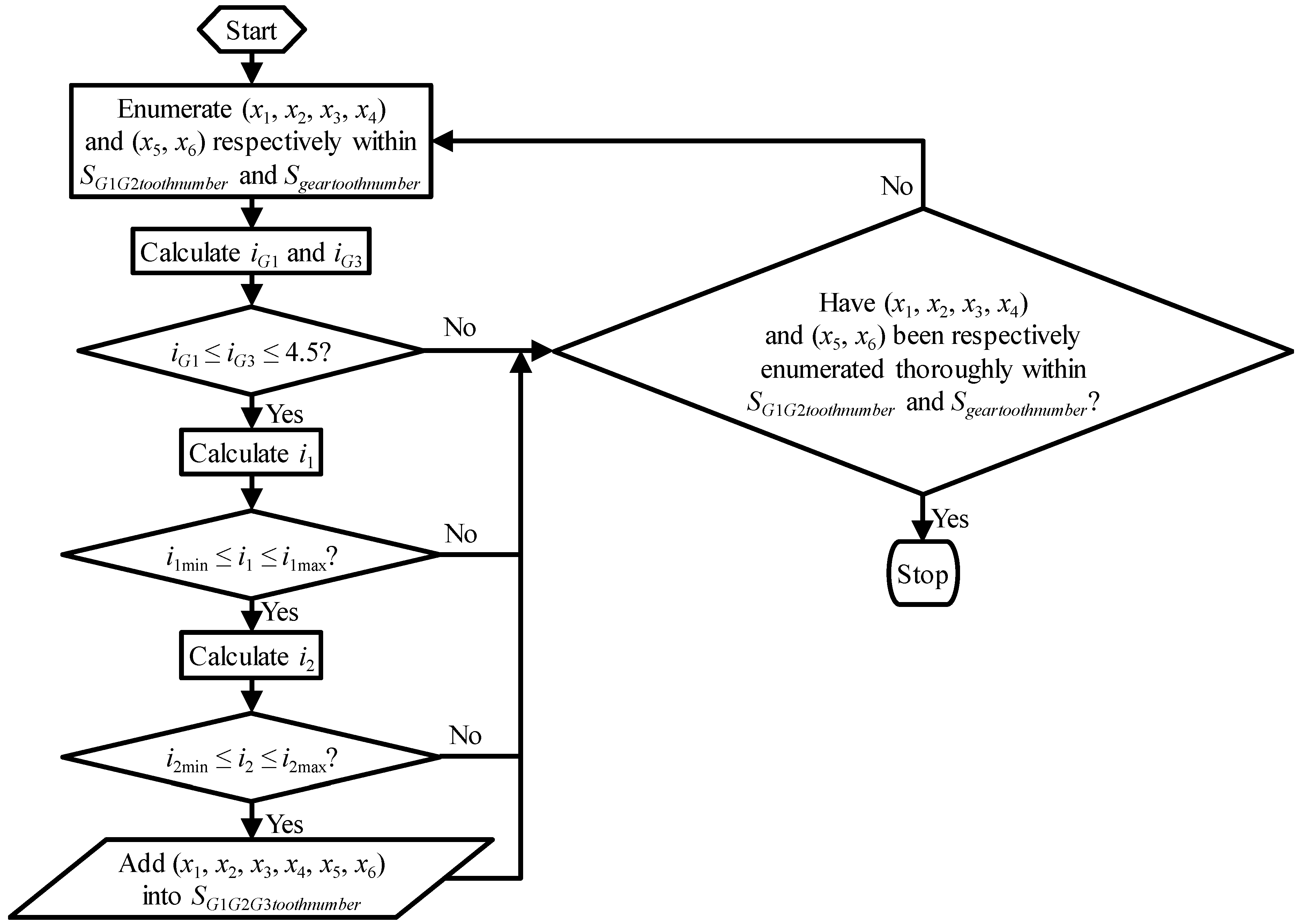
3.3. Tooth Numbers of G1, G2 and G3
Engineering experience usually suggests that
Besides, the scopes of
and
are
Therefore,
, the set of feasible tooth number combinations of G1, G2 and G3, can be expressed as
Figure 5 shows the scheme of the enumeration for the tooth numbers of G1, G2 and G3.
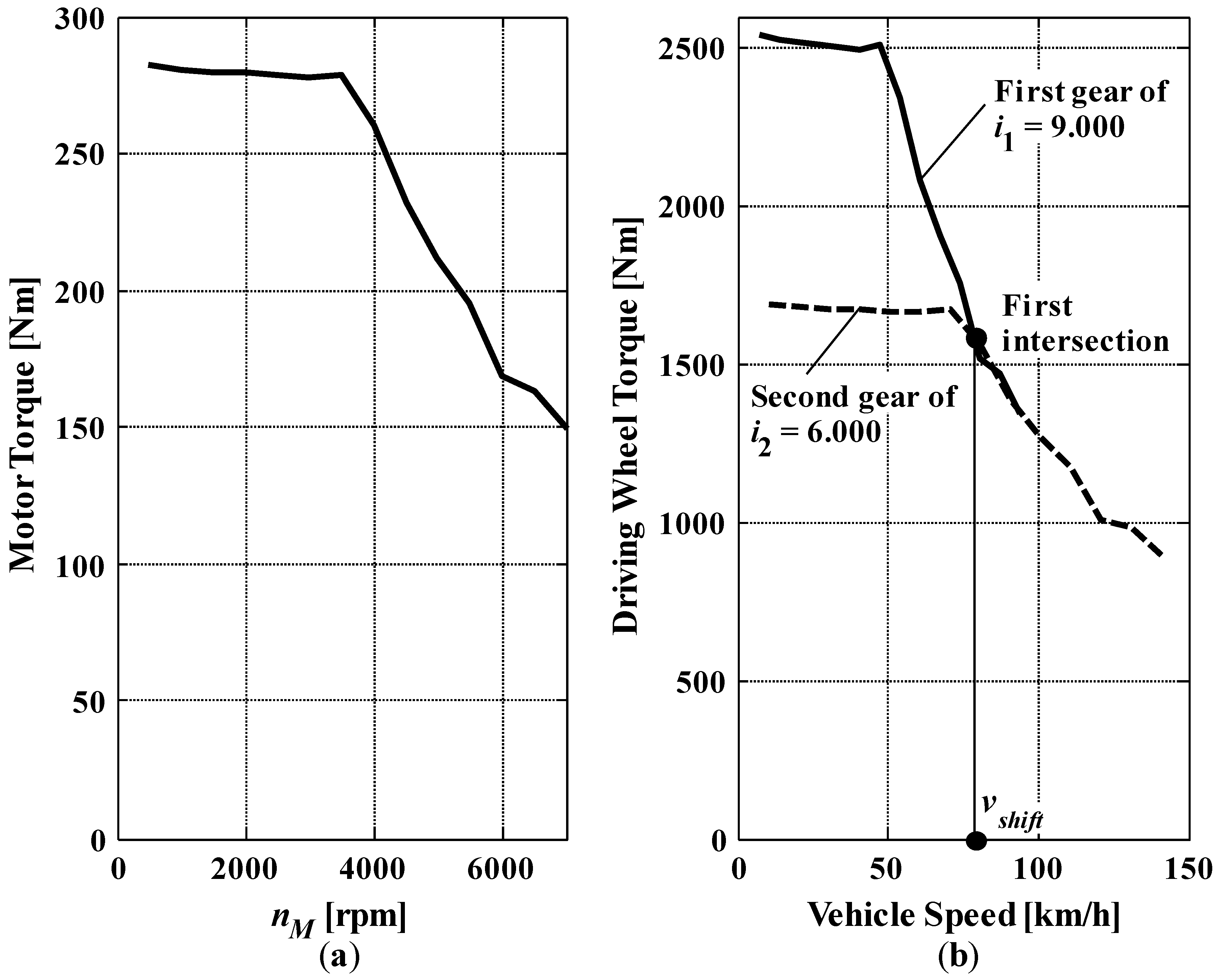
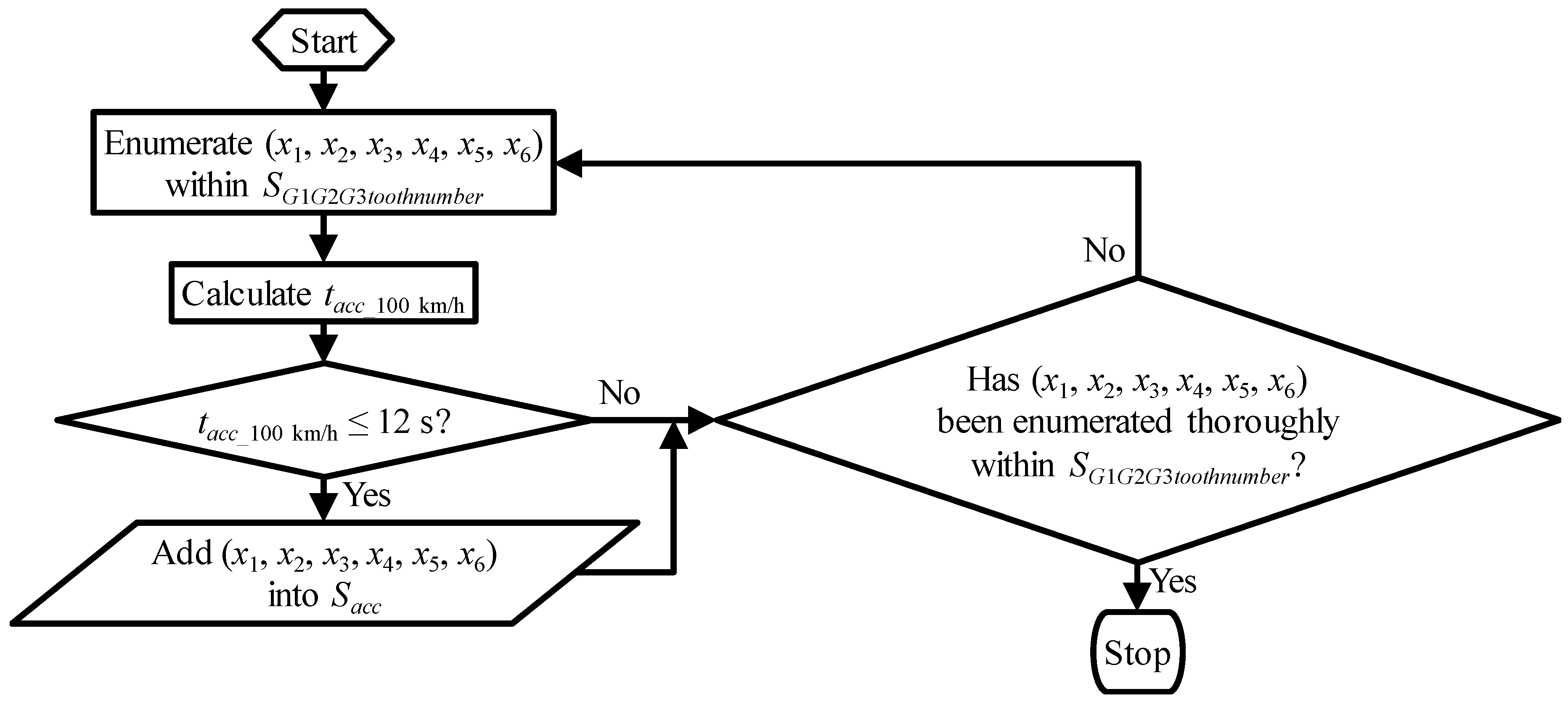
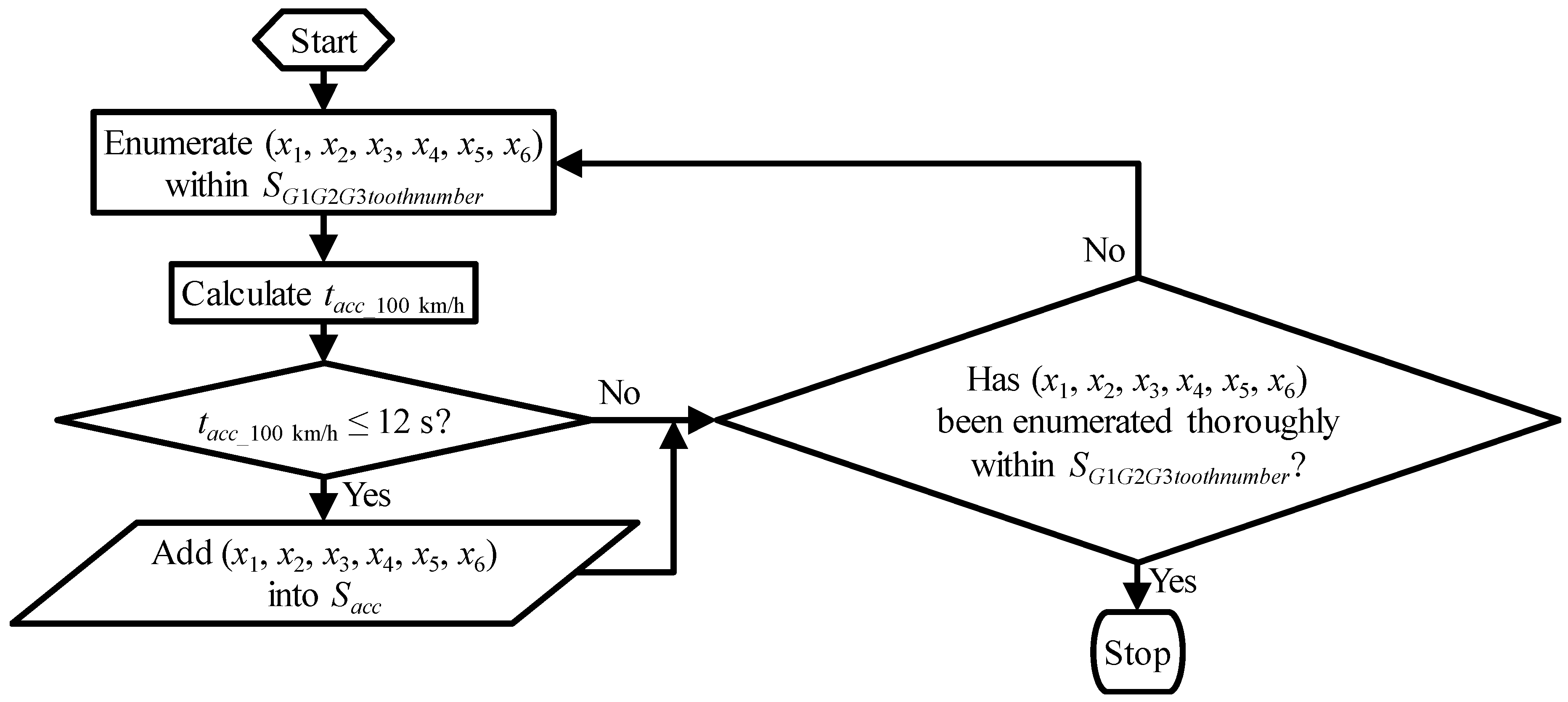
3.4. Acceleration Time
, the 0–100 km/h acceleration time, is a criterion for evaluating the power performance of the EV. For each tooth number combination belonging to
,
, the shift speed for the 0–100 km/h acceleration test, should be determined before calculating
. The motor torque-to-speed external characteristic can be converted into the vehicle torque-to-speed external characteristics of the first and the second gear, based on which
is determined.
Figure 6 shows an example of the conversion of the characteristics. The first intersection of the two vehicle torque-to-speed curves can be derived with interpolation. The vehicle speed at the intersection is
. However, if
is larger than
, the vehicle speed corresponding to
at the first gear, then
is treated as
.
can be obtained by
The 0–100 km/h acceleration process of the EV is considered in a discrete way. The constant acceleration time step
is 0.1 s. The
-th acceleration time instance
is
The EV speed at
is defined as
, and
where
and
are, respectively, the EV speed and the EV acceleration at the
-th acceleration time instance
.
can be derived from
where
and
are, respectively, the driving torque and the driving resistance torque at
.
can be interpolated by
based on the vehicle torque-to-speed external characteristics and
. If
is smaller than
, the vehicle torque-to-speed external characteristic of the first gear is used to interpolate
; otherwise, the vehicle torque-to-speed characteristic of the second gear is used.
can be obtained using
The first time reaches 100 km/h, the corresponding acceleration time instance is recorded as .
According to
Table 1,
should be constrained by
Therefore,
, the set of feasible tooth number combinations of G1, G2 and G3 with consideration on the acceleration time, can be expressed as
Figure 7 shows the scheme of the enumeration for the acceleration time.
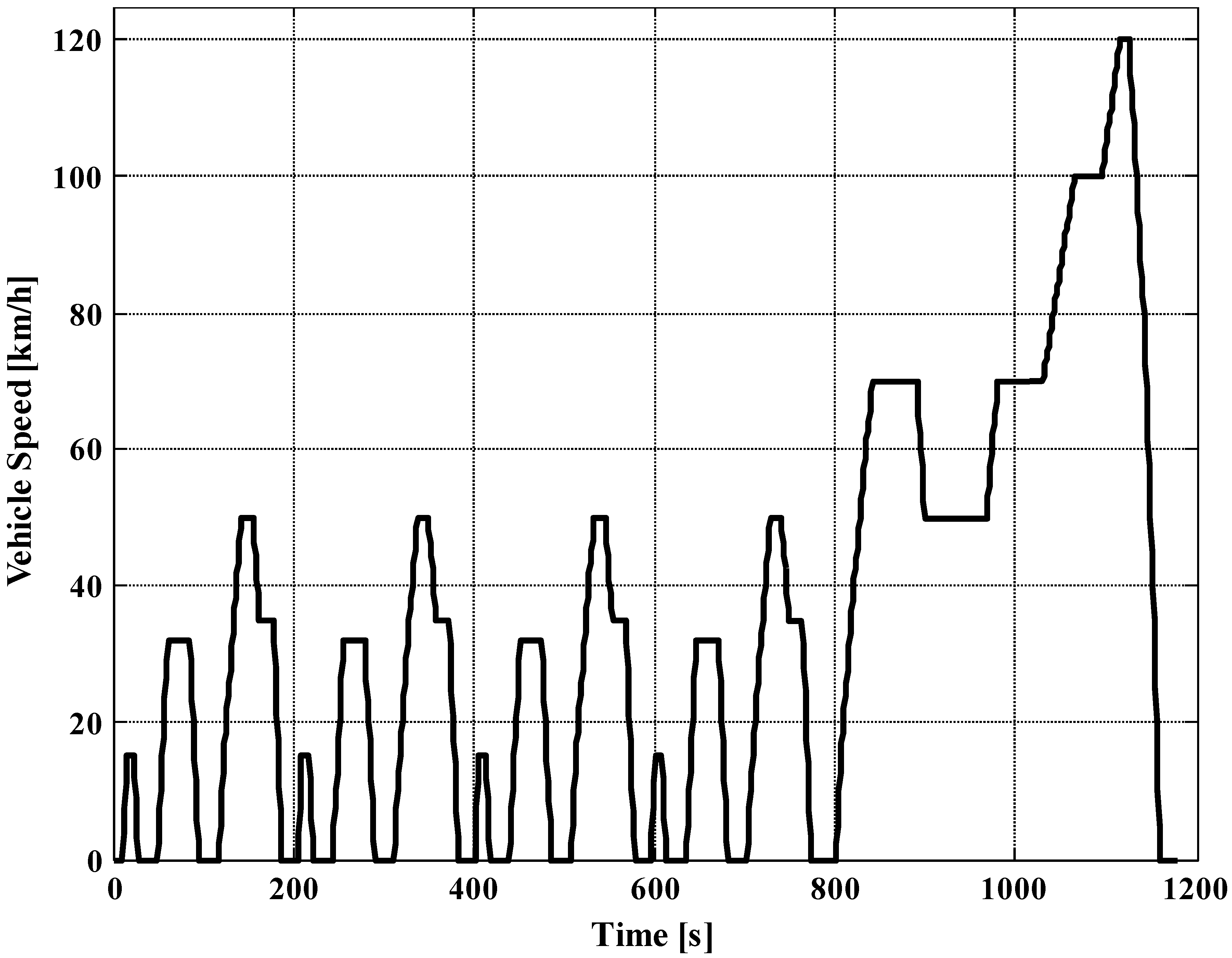
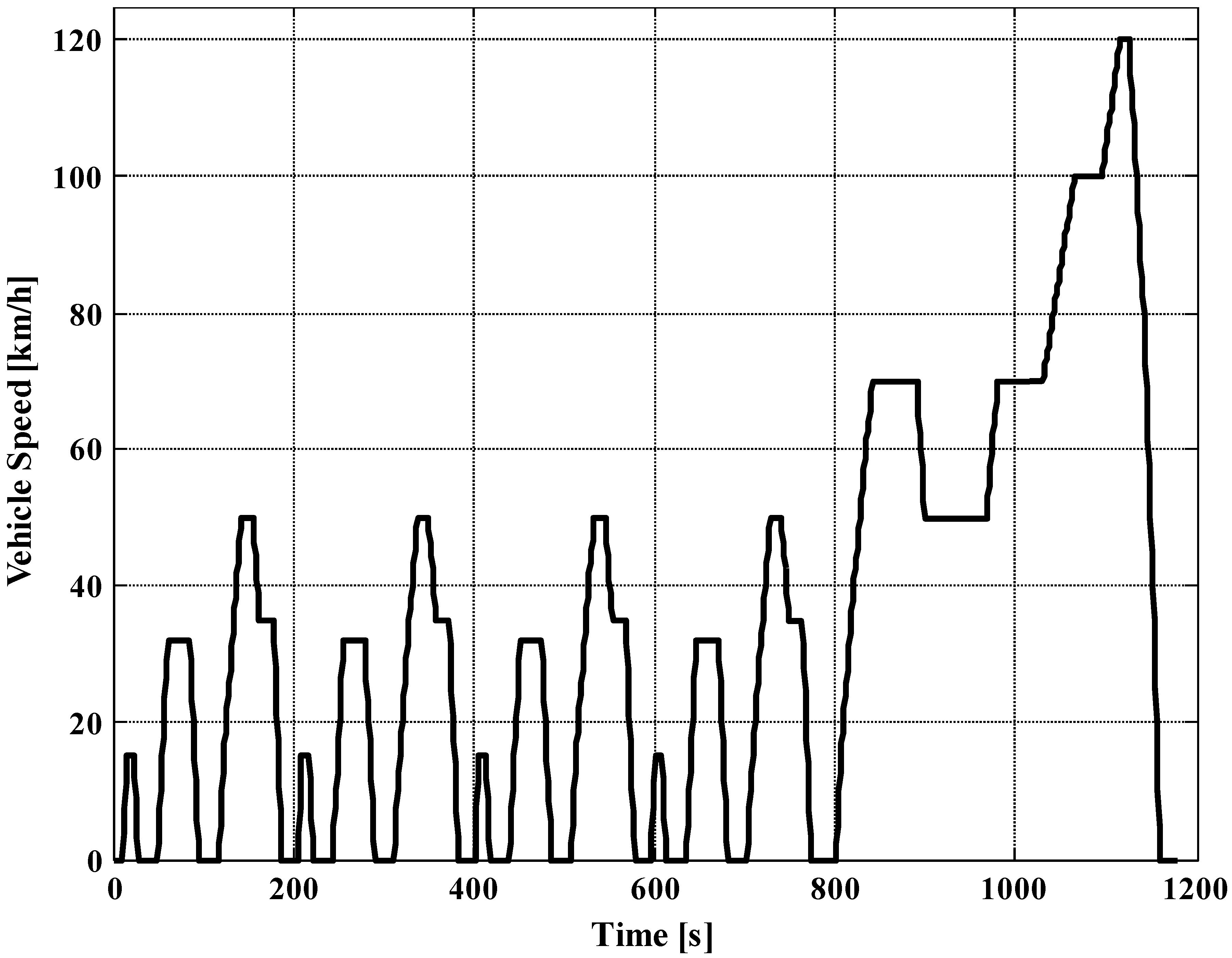
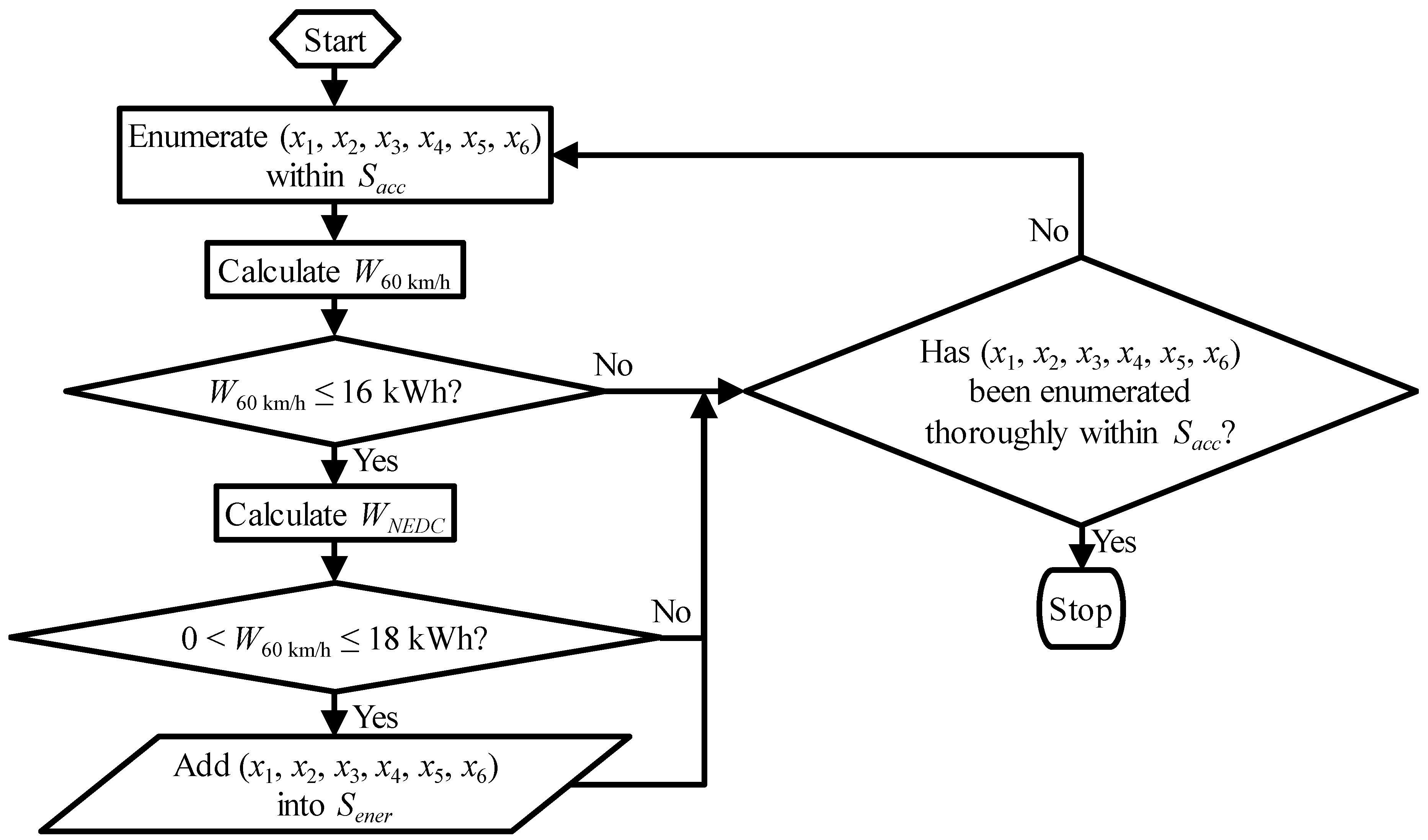
3.5. Energy Consumption
For each element of
, both the 100 km energy consumption at a constant speed of 60 km/h and that according to the New European Driving Cycle (NEDC) [
27] (see
Figure 8) are criteria for evaluating the economic performance of the EV, respectively, denoted as
and
. Calculating
and
requires a knowledge of the efficiency of each power-transition component, such as the battery, the inverter, the motor and the 2DET. For simplification, the efficiencies of all the power-transition components but the motor are assumed to be 100%.
can be calculated by
where
is the consumed power of the EV at 60 km/h.
can be obtained by
where
is the driving resistance power of the EV at 60 km/h and
the motor efficiency at 60 km/h.
can be obtained by
can be obtained by
where
and
are, respectively, the motor efficiencies of the first and the second gear at 60 km/h.
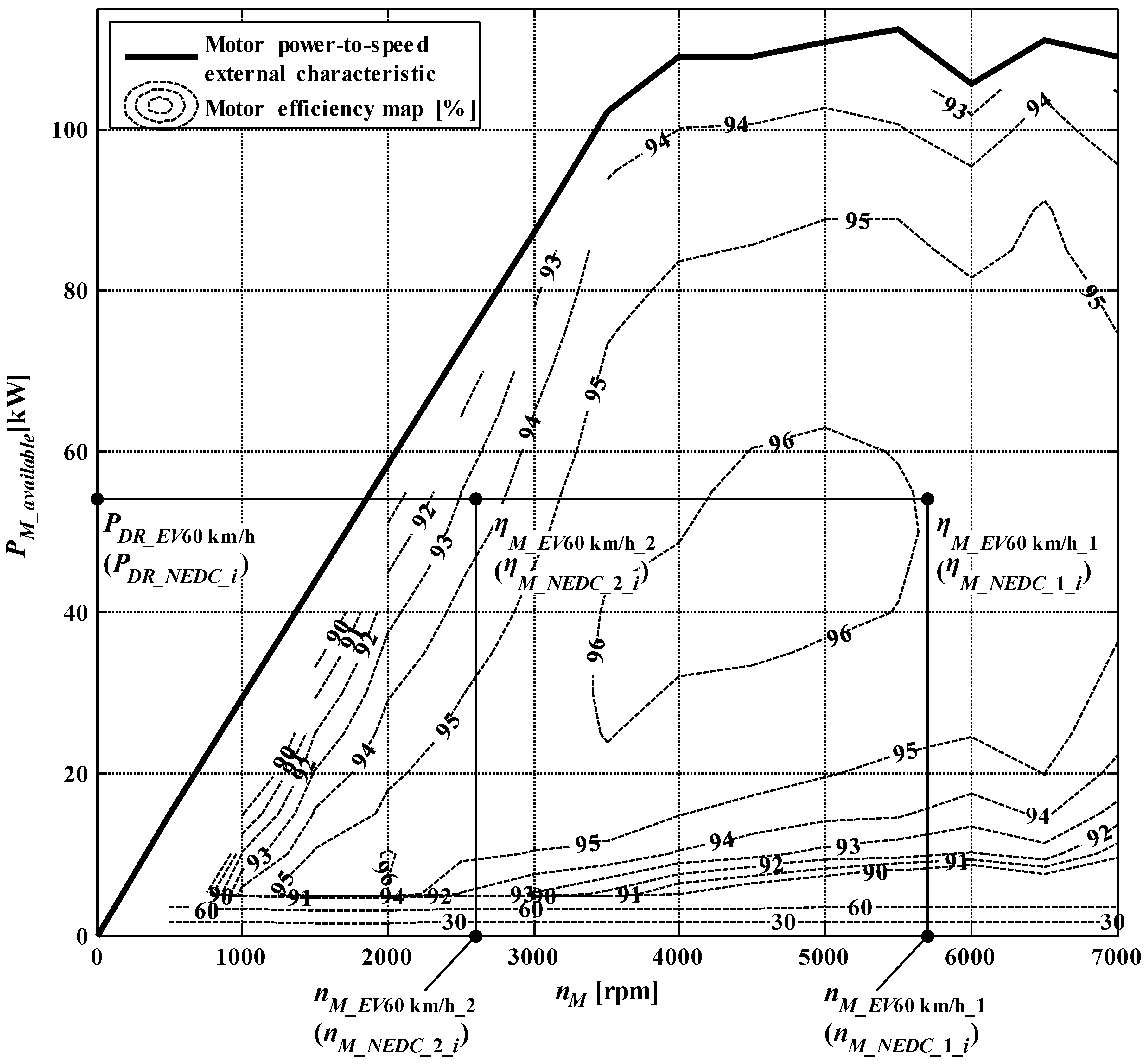
and
can be obtained based on the motor efficiency map (see
Figure 9) with
,
and
, where
and
are, respectively, the required motor speeds of the first and the second gear at 60 km/h, and
can be obtained by
where
is the index meaning that, at the
-th NEDC time instance
, the driving distance first reaches 100 km;
and
, respectively, the consumed powers of the EV at the
-th and the
-th NEDC time instance
and
; and
the constant NEDC time step of 1 s.
is determined by the following equation system
where
and
are, respectively, the EV speeds at
and
.
can be obtained with
and
can be obtained with
where
is the driving resistance power of the EV at
, and
the motor efficiency at
.
can be calculated by
where
is the EV acceleration at
.
can be calculated by
Before determining
, the working gear at
should be determined. The required motor speeds of the first and the second gear at
are, respectively, denoted as
and
, and
Then,
and
, respectively, the motor efficiencies of the first and the second gear at
, can be obtained based on the motor efficiency map (see
Figure 9) with
,
and
. In addition,
and
, respectively, the maximum available motor powers of the first and the second gear at
, can be obtained based on the motor power-to-speed external characteristic (see
Figure 3). Symmetrically,
and
, respectively, the minimum available motor powers of the first and the second gear at
, can be obtained by
Besides,
and
, respectively, the required motor torques of the first and the second gear at
, can be obtained by
where
is the driving resistance torque of the EV at
, and
The following procedure decides the working gear at :
Step 1: If
then the working gear at
is the neutral gear,
where
and
are, respectively, the motor speed and the motor torque at
, and the next step is Step 4. Otherwise, the working gear at
is not the neutral gear and the next step is Step 2.
Step 2: If
then the working gear at
is the first gear,
and the next step is Step 4. Otherwise, the working gear at
is not the first gear and the next step is Step 3.
Step 3: If
then the working gear at
is the second gear,
and the next step is Step 4. Otherwise, the working gear at
is not the second gear,
and the calculation of
for the current element of
stops and that for the next element (if exists) starts.
Step 4: If
then
is a start-up instance for the EV and the next step is Step 5. Otherwise,
is not a start-up instance for the EV and the next step is Step 6.
Step 5: If
where
is the maximum motor start-up torque, then the motor start-up torque demand at
can be met and the next step is Step 6. Otherwise, the motor start-up torque demand at
cannot be met,
and the calculation of
for the current element of
stops and that for the next element (if exists) starts.
Step 6: The procedure of deciding the working gear at ends.
According to
Table 1, the energy consumptions of the EV should be constrained by
Therefore,
, the set of feasible tooth number combinations of G1, G2 and G3 with consideration on the energy consumption, can be expressed as
Figure 10 shows the scheme of the enumeration for the energy consumptions.
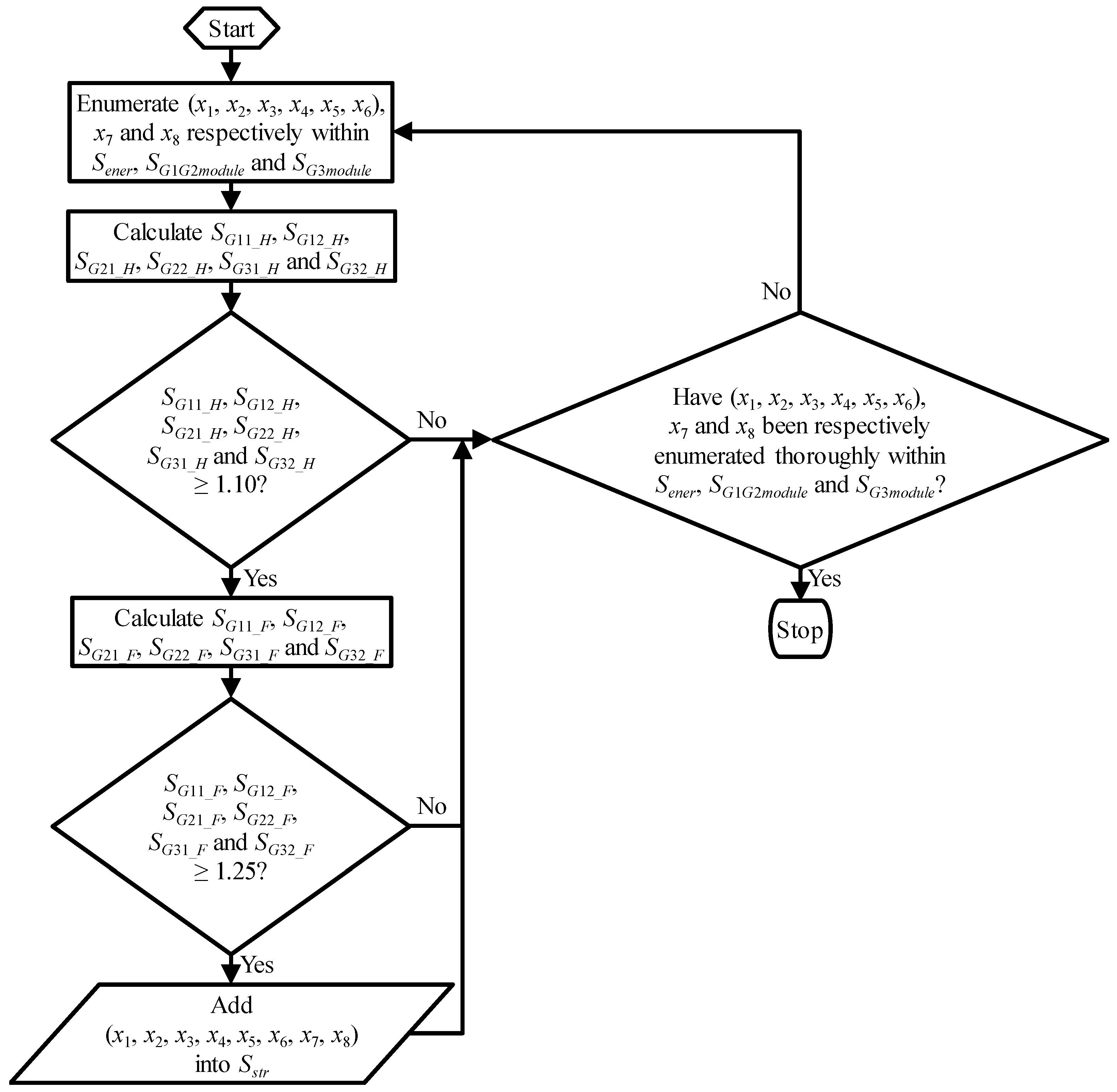
3.6. Safety Factor
The strength safety factors of all the six gears are criteria for evaluating the load capacity of the 2DET. The 200,000 km NEDC is used as the operating condition for the fatigue strength check of the 2DET. For each element of
, along with the calculation of
, the time history of the G11, the G21 and the G31 speed can be acquired by
where
,
and
are, respectively, the G11, the G21 and the G31 speed at
. Besides, the time history of the G11, the G21 and the G31 torque can be acquired by
where
,
and
are, respectively, the G11, the G21 and the G31 torque at
. Based on ISO 6336-6: 2006(E) [
28], the equivalent speeds and the equivalent torques of G11, G21 and G31 in the 100 km NEDC are calculated, regarded as the same with those in the 200,000 km NEDC for simplifying the fatigue strength check. Then, for each combination of
and
, the contact safety factors of G11, G12, G21, G22, G31 and G32, respectively, denoted as
,
,
,
,
and
, and the bending safety factors of G11, G12, G21, G22, G31 and G32, respectively, denoted as
,
,
,
,
and
, can be calculated according to GB/T 3480-1997 [
29]. These safety factors should be constrained by
Therefore,
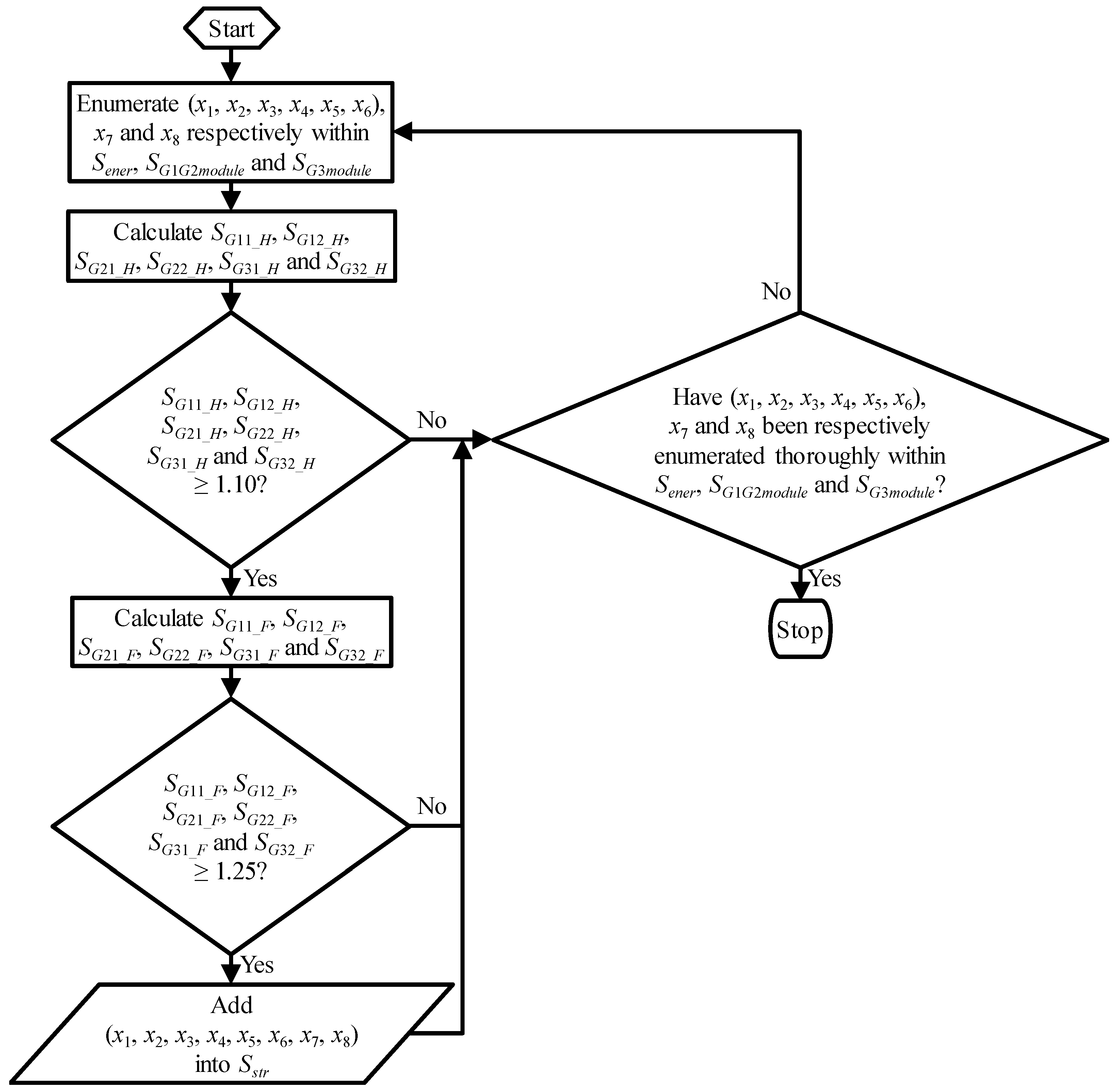
, the set of feasible tooth number and module combinations of G1, G2 and G3 with consideration on the strength, can be expressed as
Figure 11 shows the scheme of the enumeration for the safety factors.
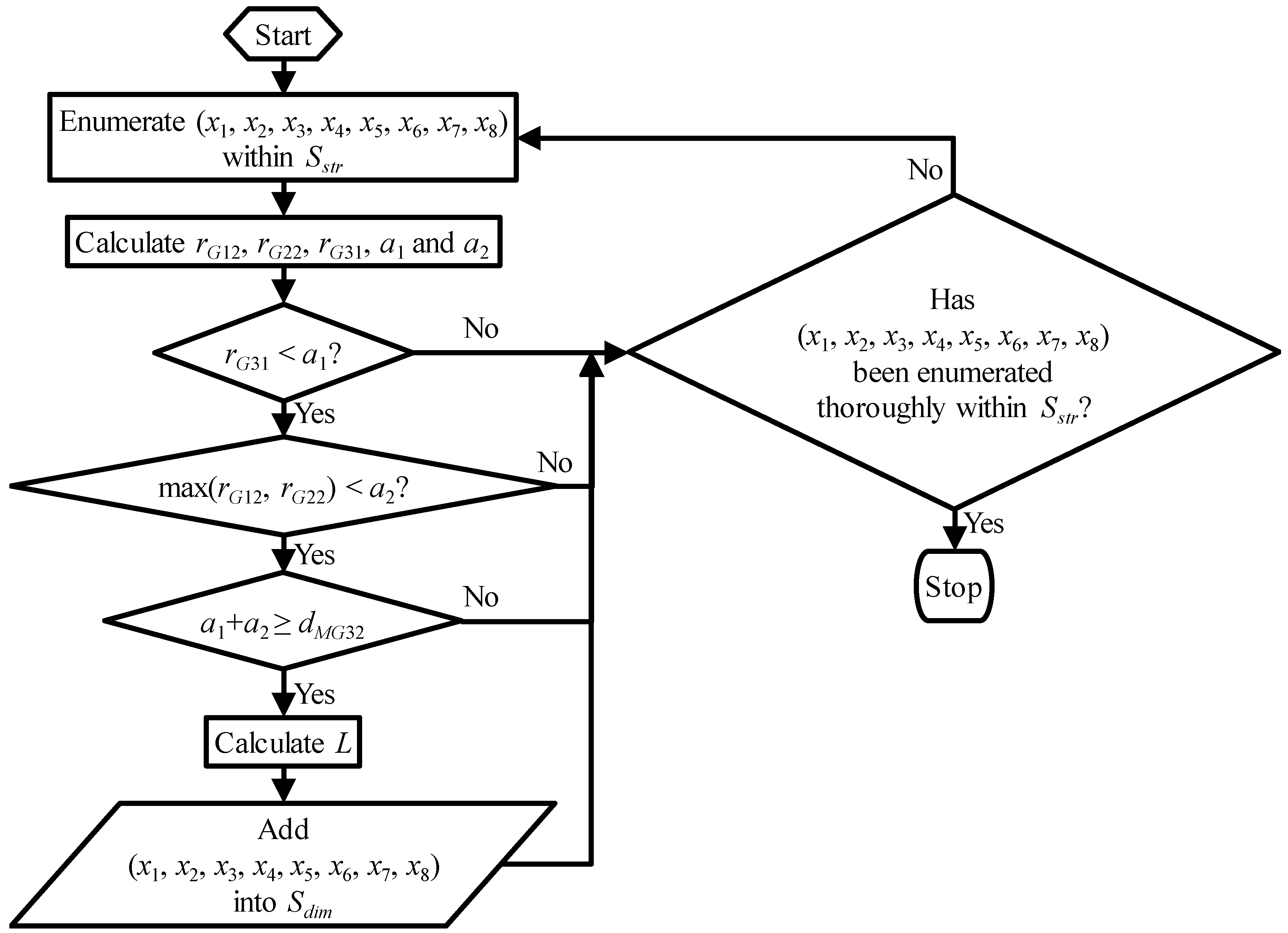
3.7. Dimension
For each element of
, several dimensions can be obtained by
where
,
,
,
,
and
are, respectively, the reference radii of G11, G12, G21, G22, G31 and G32, and
and
, respectively, the center distances of G1 (or G2) and G3. To avoid interference, the following constraints apply:
Moreover, the EV arrangement requires that
where
is the distance between the rotation axis of the input shaft and that of G32. Therefore,
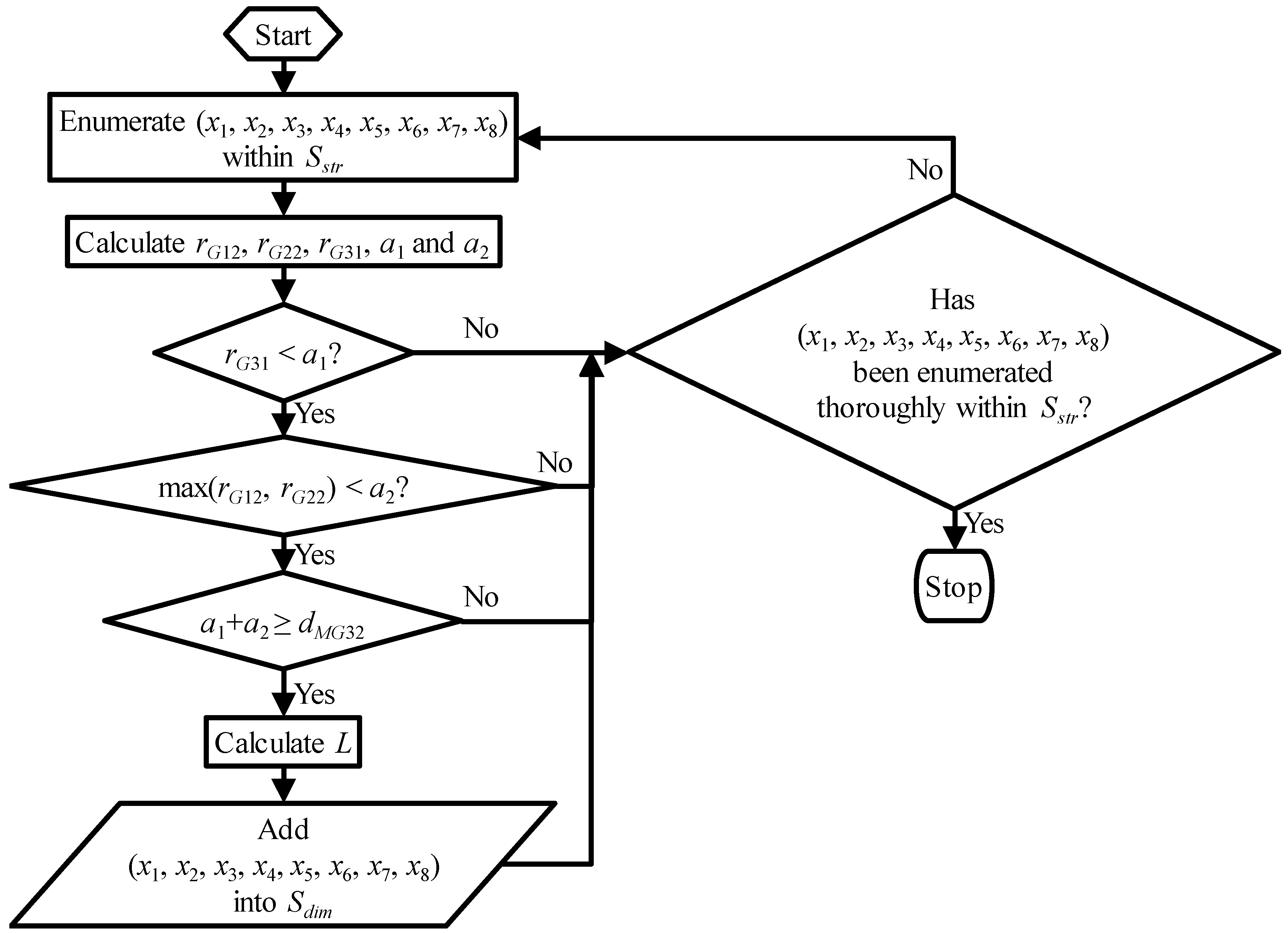
, the set of feasible tooth number and module combinations of G1, G2 and G3 with consideration on the dimension, can be expressed as
For each element of
, the radial length
, representing the size of the GT, can be obtained by
Figure 12 shows the scheme of the enumeration for the dimensions.
4. MMPO
The optimization method used in this paper is based on the MMPO [
14]. According to Osyczka [
14], for a multi-criterion optimization problem, the MMPO assumes that none of the criteria change sign and none are equal to zero within the feasible region, and that all the criteria are to be minimized. Based on these assumptions, the fractional increment is defined as [
14]
where
is a feasible solution of the multi-criterion optimization problem;
the feasible region of the multi-criterion optimization problem;
the empty set;
the number of the criteria,
and
, respectively, the fractional increment and the value of the
-th criterion of
; and
the minimum of the
-th criterion.
can be obtained by solving the following single-criterion optimization problem
where
is the objective function of the single-criterion optimization problem.
represents how much
deviates from
. For each
,
,
,…, and
are anew denoted as
,
…, and
, and
Using , the following procedure decides , the global optimum of the multi-criterion optimization problem:
Step 1: Set
, where
is a temporary variable. Solve the following single-criterion optimization problem
where
is the objective function of the single-criterion optimization problem. Denote the set of the optima of the single-criterion optimization problem as
. If only one optimum is obtained, go to Step
. Otherwise, go to Step 2.
Step 2: Set
. Solve the following single-criterion optimization problem
where
is the objective function of the single-criterion optimization problem. Denote the set of the optima of the single-criterion optimization problem as
. If only one optimum is obtained, go to Step
. Otherwise, go to Step 3.
Step
: Set
. Solve the following single-criterion optimization problem
where
is the objective function of the single-criterion optimization problem. Denote the set of the optima of the single-criterion optimization problem as
. If only one optimum is obtained, go to Step
. Otherwise, go to Step
.
Step
: Set
. Solve the following single-criterion optimization problem
where
is the objective function of the single-criterion optimization problem. Denote the set of the optima of the single-criterion optimization problem as
. Go to Step
.
Step : Every element in is the global optimum of the multi-criterion optimization problem. The procedure of deciding ends.
For a better comprehension of how the MMPO and the fractional increment work, an additional example is presented by
Table 2 and
Table 3.
Table 3 indicates that (0, 0) is the global optimum of the example.
To optimize the GT of the 2DET, the acceleration time , the energy consumptions and , and the radial length need to be minimized, while the safety factors , , , , , , , , , , and need to be maximized. Since these criteria need to be optimized simultaneously by the MMPO, the maximization problems for the safety factors are converted to the minimization problems for , , , , , , , , , , and .
Due to the limited space, the detail of implementing the MMPO to the GTOP of the 2DET, based on the results from the multi-stage enumeration in
Section 3 is not presented.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}