1. Introduction
With the advent of the fourth industrial revolution era, the use of unmanned aerial vehicles (UAVs) has recently emerged. Some three million personal and commercial UAVs are expected to be globally produced and distributed in 2017 [
1] and so the safety of these UAVs has become an issue [
2].
Rules and regulations related to UAVs are important, but not as crucial as the unmanned aerial system (UAS) itself. There are various components, and combining a UAV and a fuel system is one of the main components [
3]. In general, small and medium size UAVs use either lithium ion (Li-ion) or lithium polymer (Li-Po) batteries as their energy source and large size UAVs use one of the following fuel systems: Li-ion batteries, petroleum-based fuels, and hybrid fuels (petroleum-based fuel + Li-ion, fuel cell + Li-ion, solar power + Li-ion, etc.) [
4].
In accordance with the consistent increase of the specific energy (Wh/kg) of both Li-ion and Li-Po batteries, these eco-friendly energy sources are preferred for small, medium, and large size UAVs. In particular, as battery management system (BMS) technologies have matured, small, medium, and even large size UAVs have started to use light, thin, and easily deformable Li-Po batteries which provide high (dis)charging C-rates and provide high energy density.
Measurement data of the state of charge (SOC) are used as a crucial factor for the accurate assessment of the remaining battery charge level and eventually to increase flight time. Accurate state of power (SOP) estimation is important since underestimated SOP would limit rapid maneuverability and overestimated SOP would result in crashes during the takeoff phase, collision avoidance phase, etc. Also, during the battery pack charging process, underestimated SOP would result in dragging charging time and overestimated SOP would damage the cells.
The SOC of the Li-Po battery changes nonlinearly during the (dis)charging process in a relatively uniform pattern, but exact SOC estimation is affected by several phenomena, including ambient temperature, deterioration in service life, hysteresis effects, self-discharging, etc. Estimating SOP values is even more difficult since it utilizes the SOC estimation value to calculate the accurate (dis)charging power information affording the optimum operation of electrical and electronic systems. Due to the previously mentioned issues, SOC and SOP measurements of the Li-ion battery have been in the spotlight for the optimal control of the battery power management in the renewable energy industry and vehicle industry fields, including electric vehicles (EVs) and UAVs.
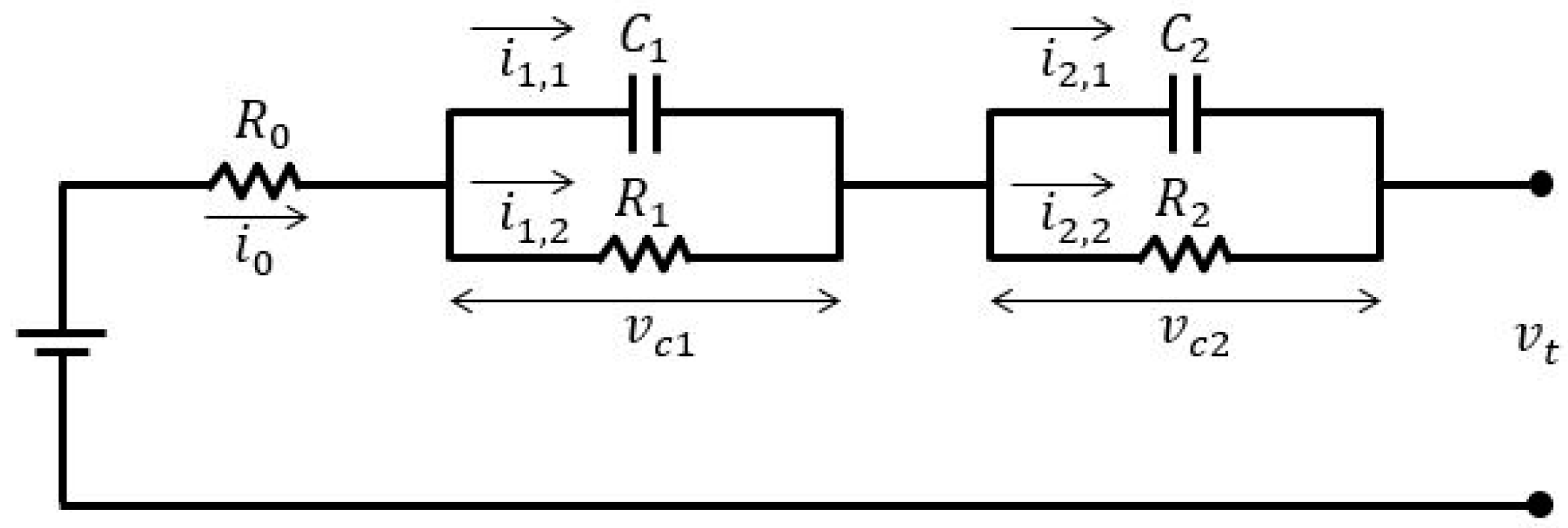
To understand the characteristics of Li-Po batteries, the battery equivalent circuit model (ECM) should be selected first. The ECM has been traditionally developed in three branches, including an ECM, physical electric circuit model (PECM), and electrochemical model (EM) [
5]. Each battery model has evolved into various forms to accurately simulate different battery states which eventually could result in exact SOC and SOP state estimations.
The ECM has been applied to the widest range of industries to date due to the small amount of computation and estimation errors. Gao and et al. [
6] used a coupled equivalent circuit and convective thermal model to estimate SOC and the temperature of the LiFePO
4 by using a MATLAB (R2016a, MathWorks, Natick, MA, USA)/Simulink based algorithm. Since this paper focuses on a small size agricultural UAV whose payload is limited and which faces high crash risk, the ECM including only an impedance characteristic is chosen to quickly and exactly estimate battery SOC and SOP states.
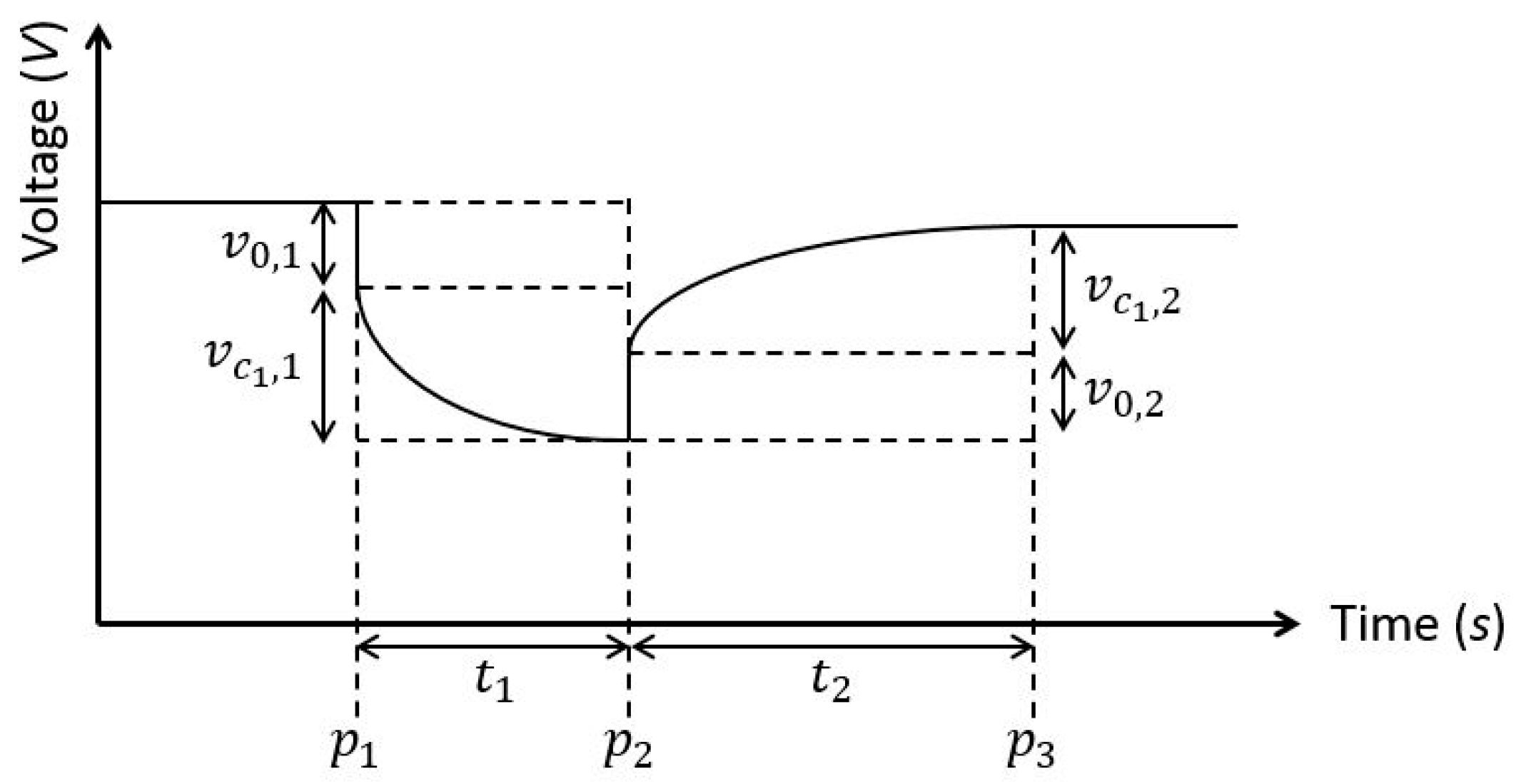
ECMs are commonly designed with a one ladder, two ladders, and multi-ladders including parameters for hysteresis, heat transfer, impedance, etc. and the exact state estimation using an ECM is dependent on the accuracy of these parameters. To predict these parameters, open circuit voltages (OCVs) are measured by applying specific current patterns to the battery in various test environments (temperature, SOC, C-rate, etc.).
Gao et al. [
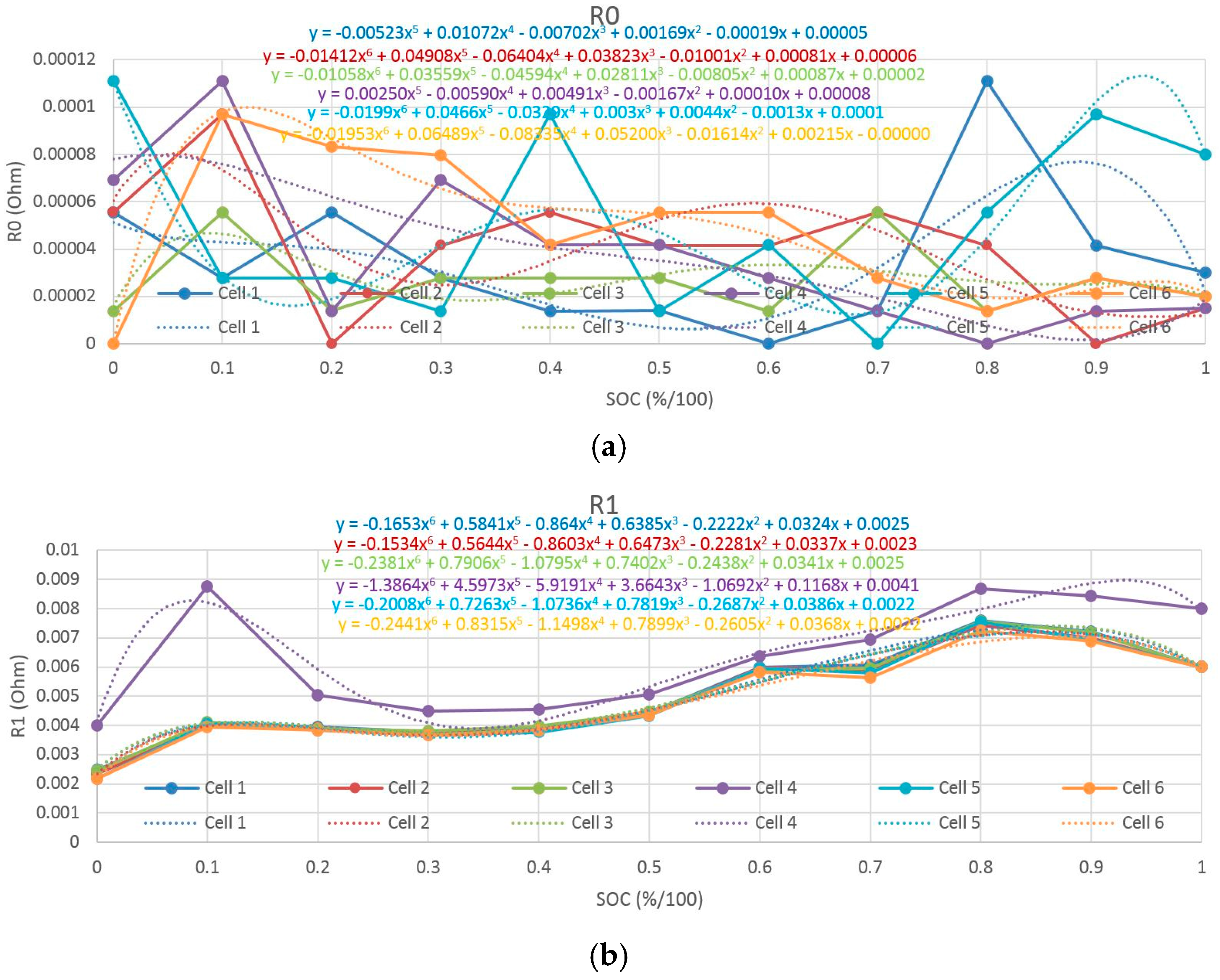
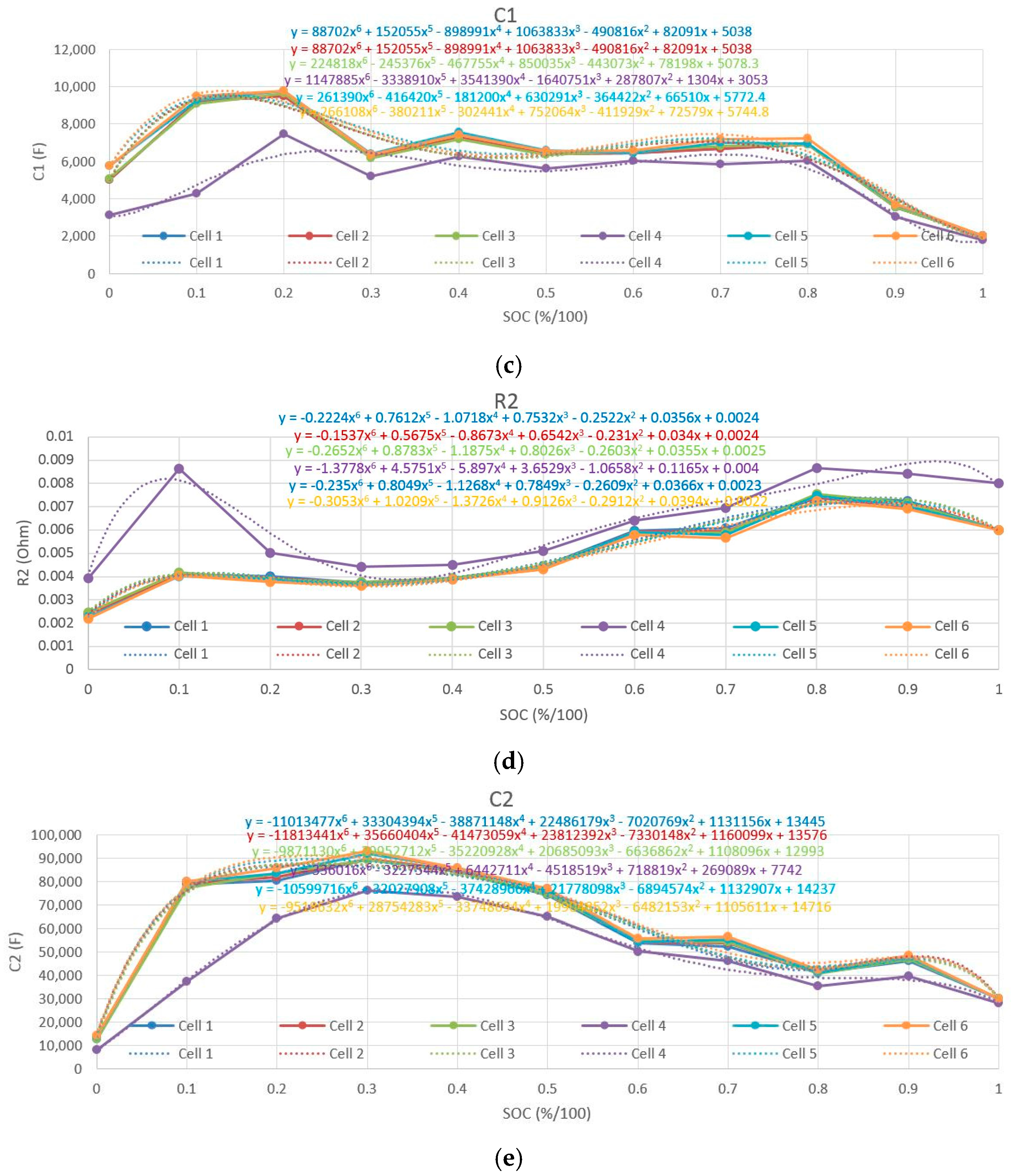
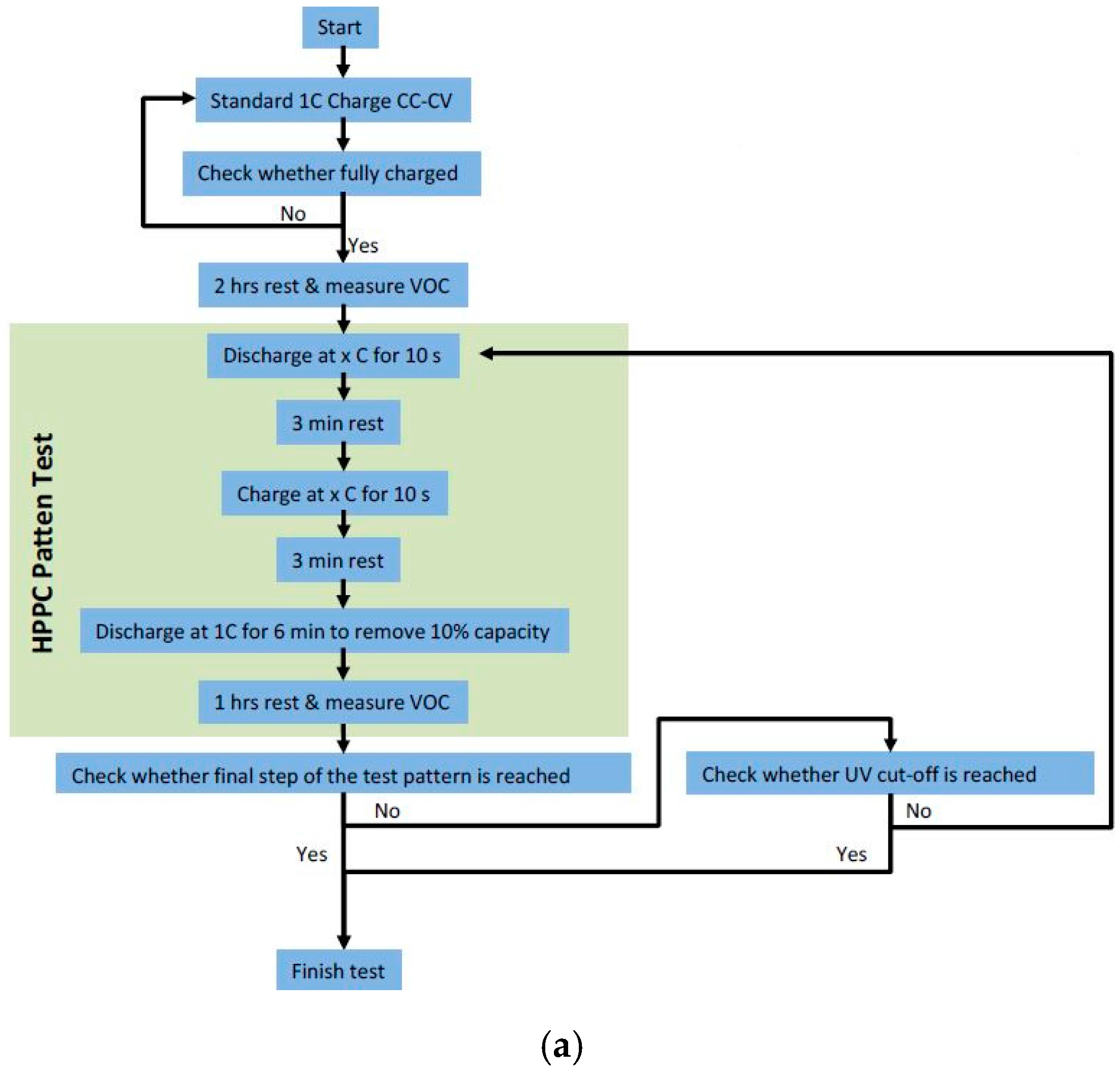
7] compared six different parameter estimation methods by considering computation time, OCV residual error, and convergence time and concluded to use the nonlinear-trust region algorithm since it has the minimum OCV residual error. High performance pulse characterization (HPPC) is one of the widely used current patterns and it will be used in this paper. A numerical optimization algorithm is commonly used to extract accurate parameters from the OCV outputs, but we simply use the table-based linear interpolation (TBLI) method.
In addition, there are various SOC and SOP state estimation methods, including linear Kalman filter (LKF), extended Kalman filter (EKF), sigma-point Kalman filter (SPKF), particle filter (PF), fuzzy logic (FL), etc. Jia et al. [
8] compared EKF, strong tracking EKF (STEKF), and multirate strong tracking EKF (MRSTEKF) and proved the MRSTEKF has faster computation time and more precise estimation ability. In contrast to the listed estimation methods, we adopted the fused estimation method of both the complementary filter (CF) and EKF resulting much accurate estimation accuracy.
The flow of this paper is as follows: in
Section 2, battery ECM, TBLI parameter determination, SOC and SOP state estimation deviations, and EKF state estimation are described.
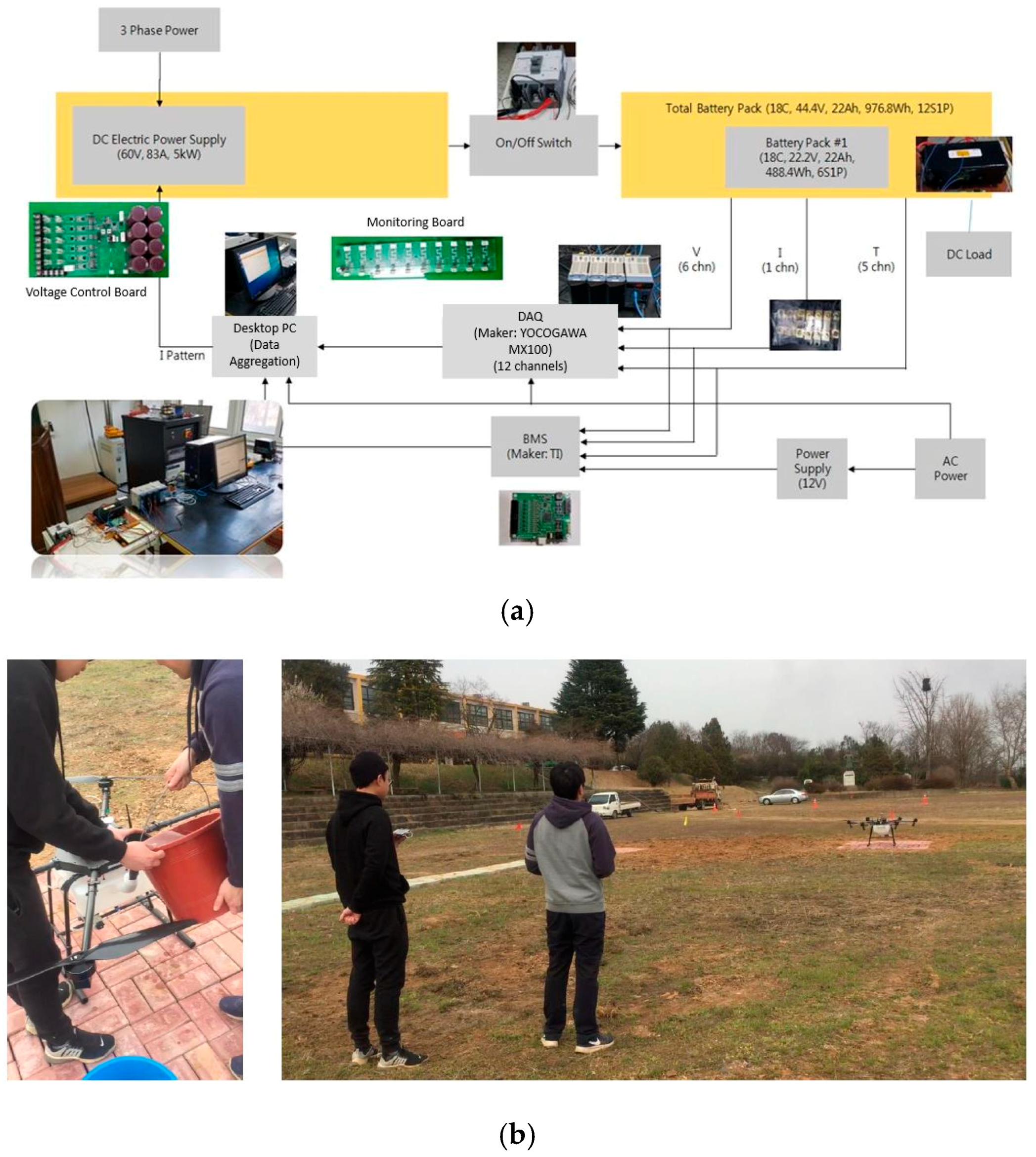
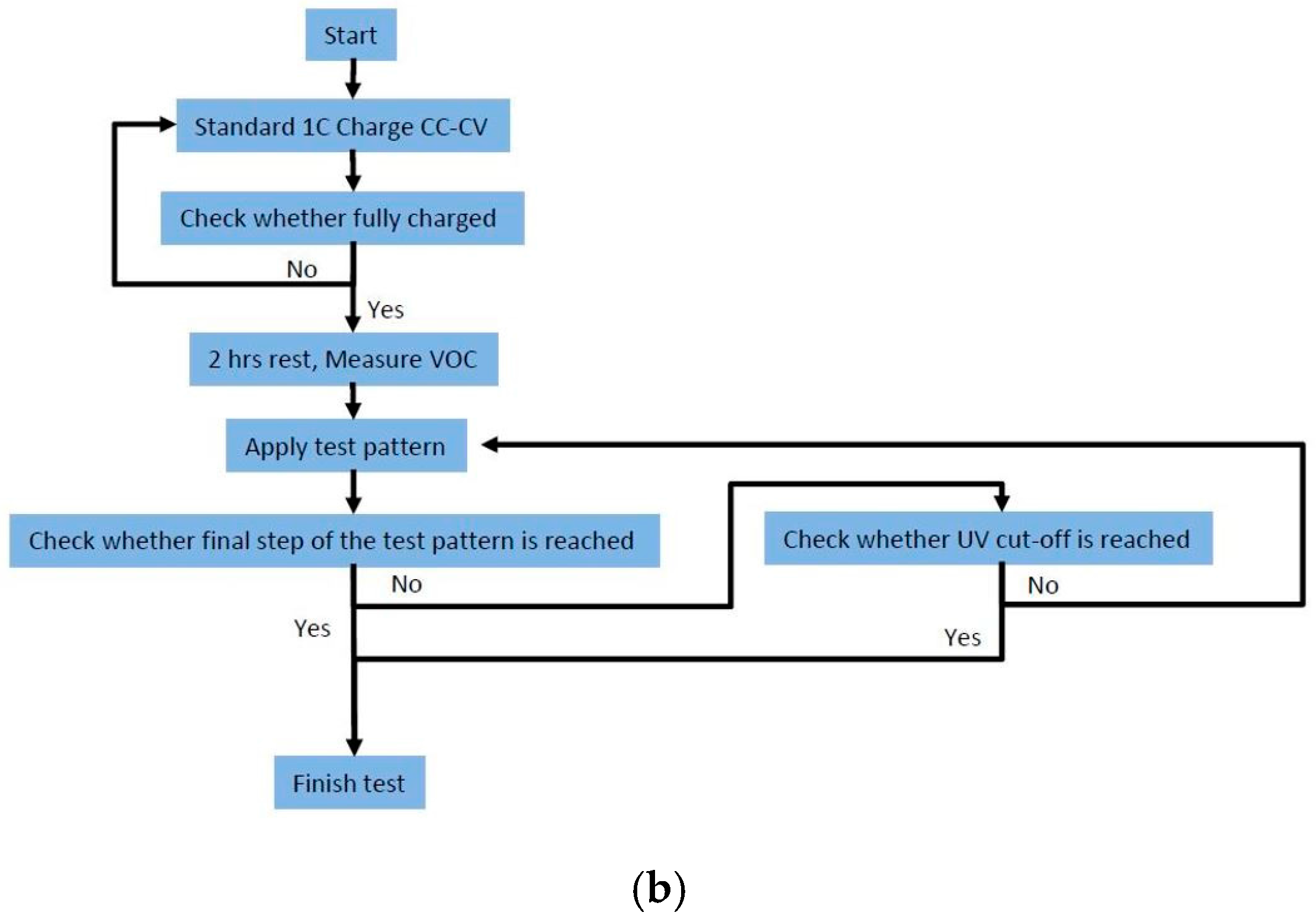
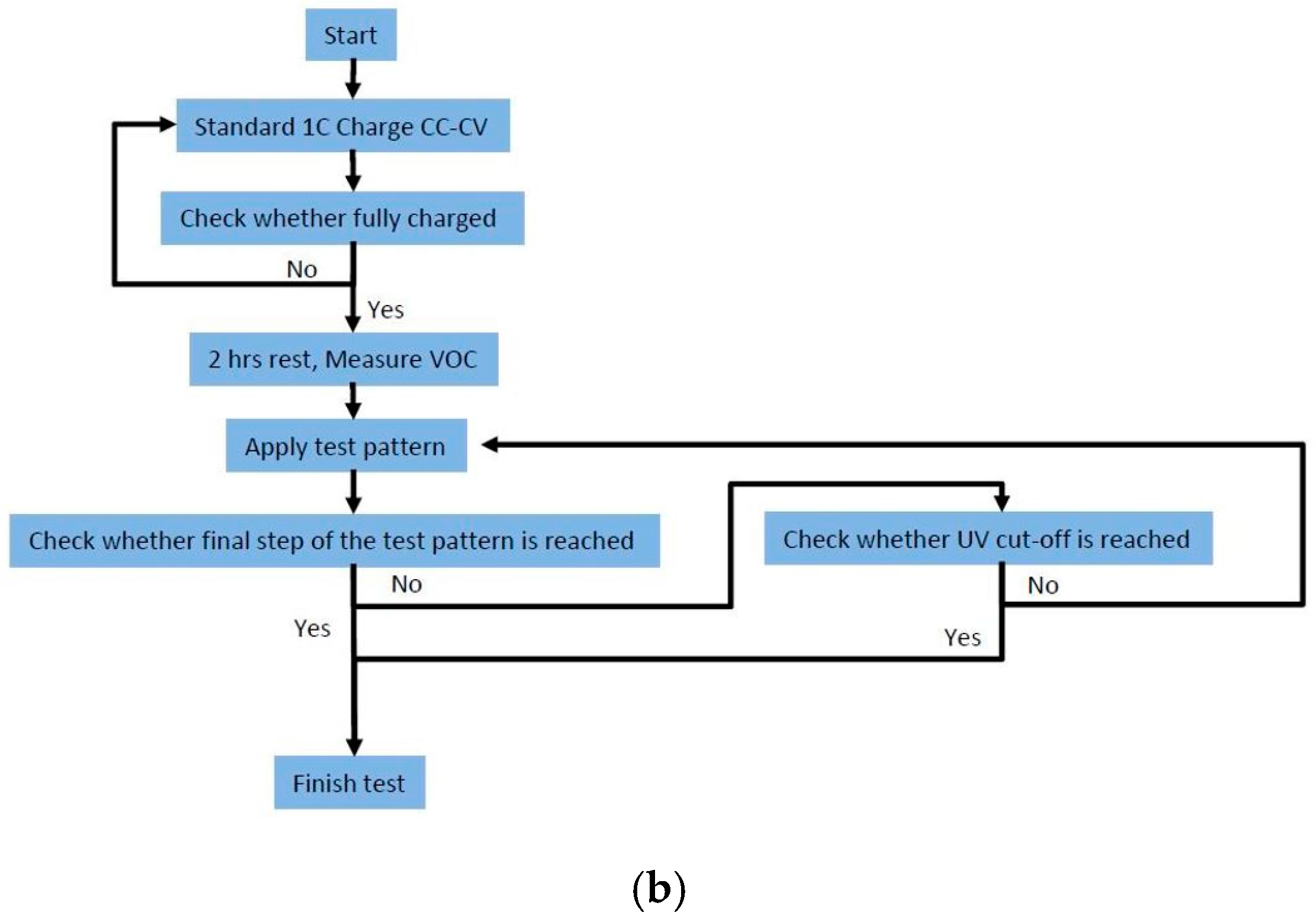
Section 3 explains the test setup, including test environments and test cases.
Section 4 shows experiment results of parameter optimization and SOC and SOP state estimations.
Section 5 contains the conclusion of this paper and future works.
5. Conclusions
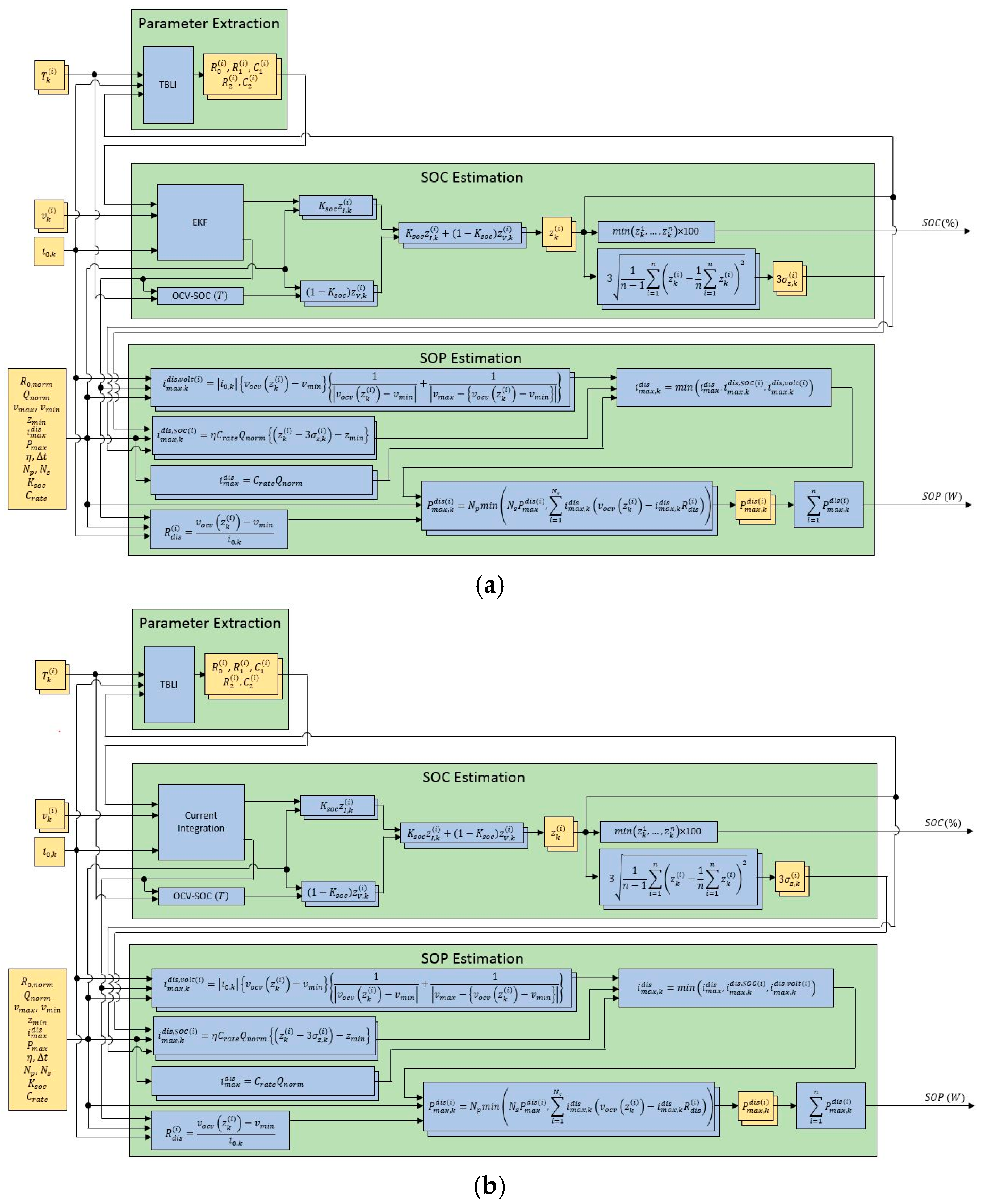
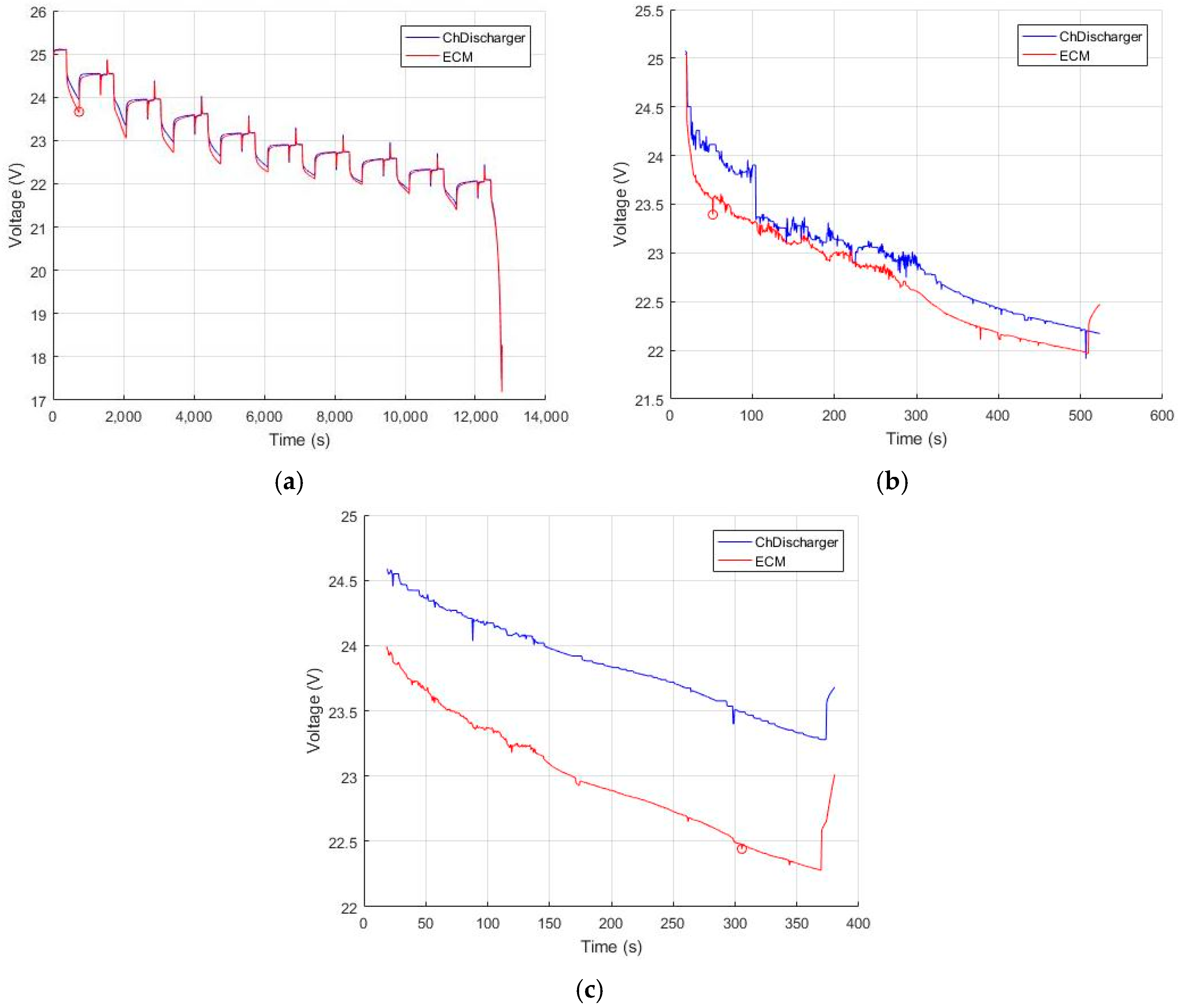
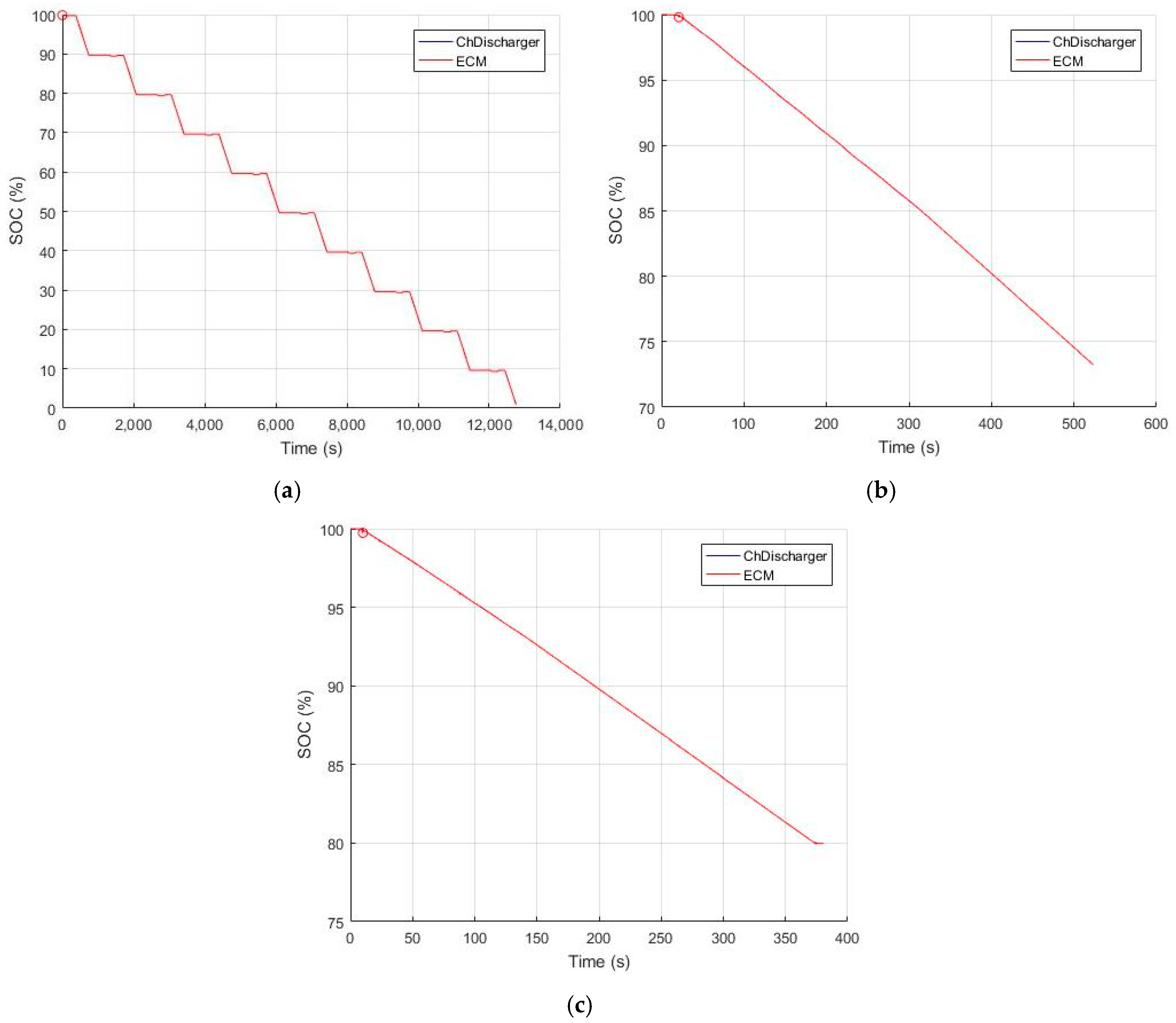
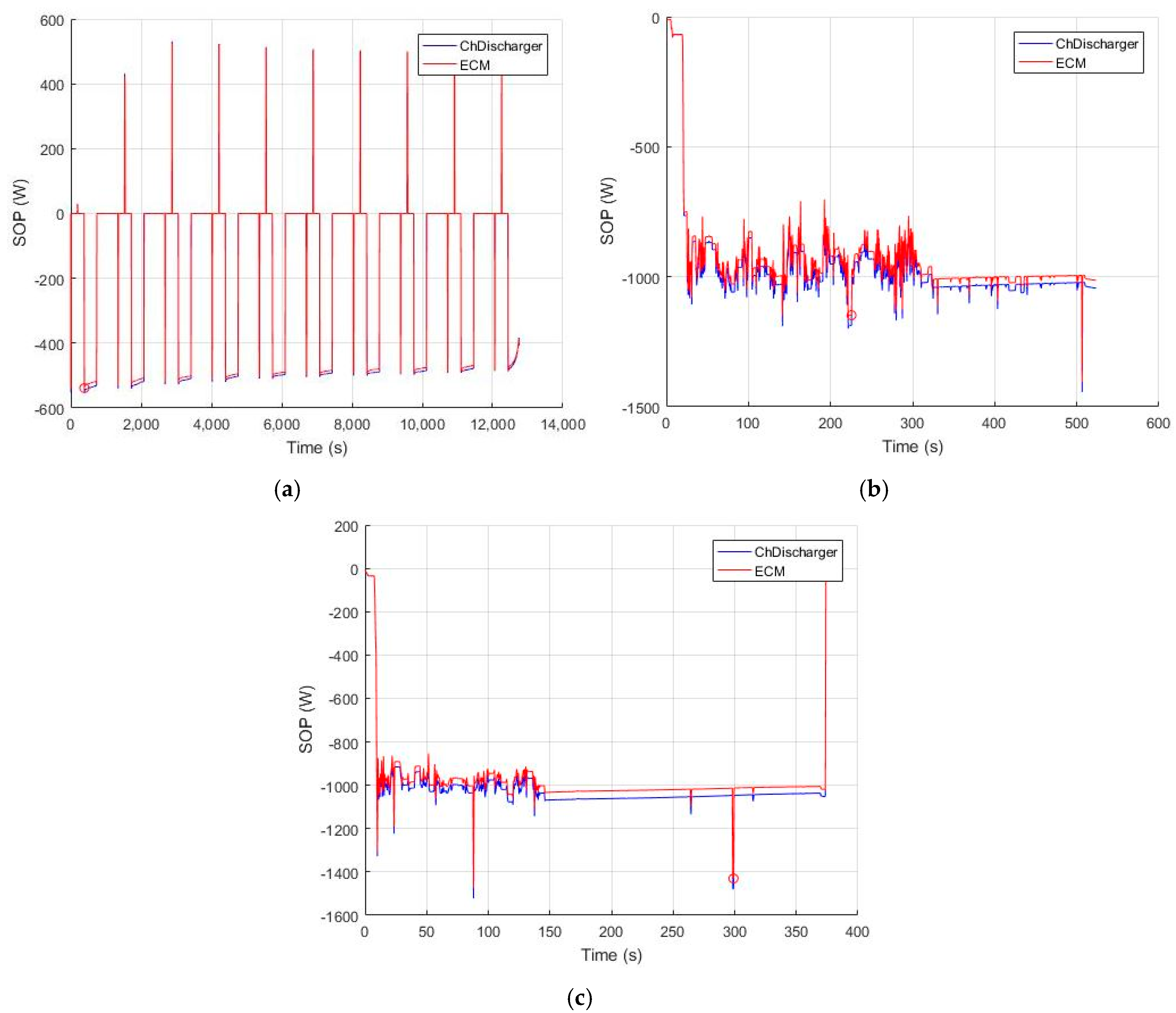
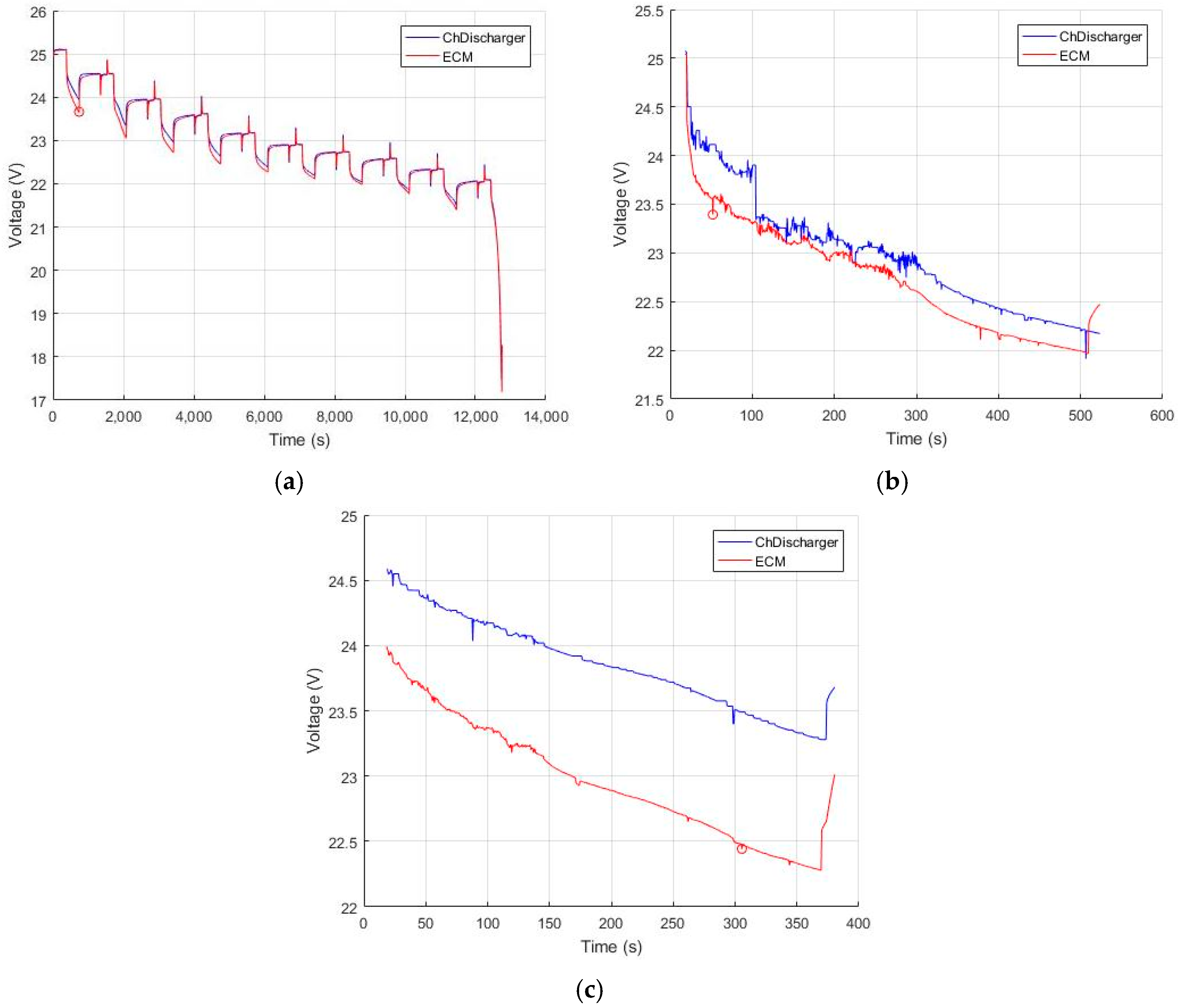
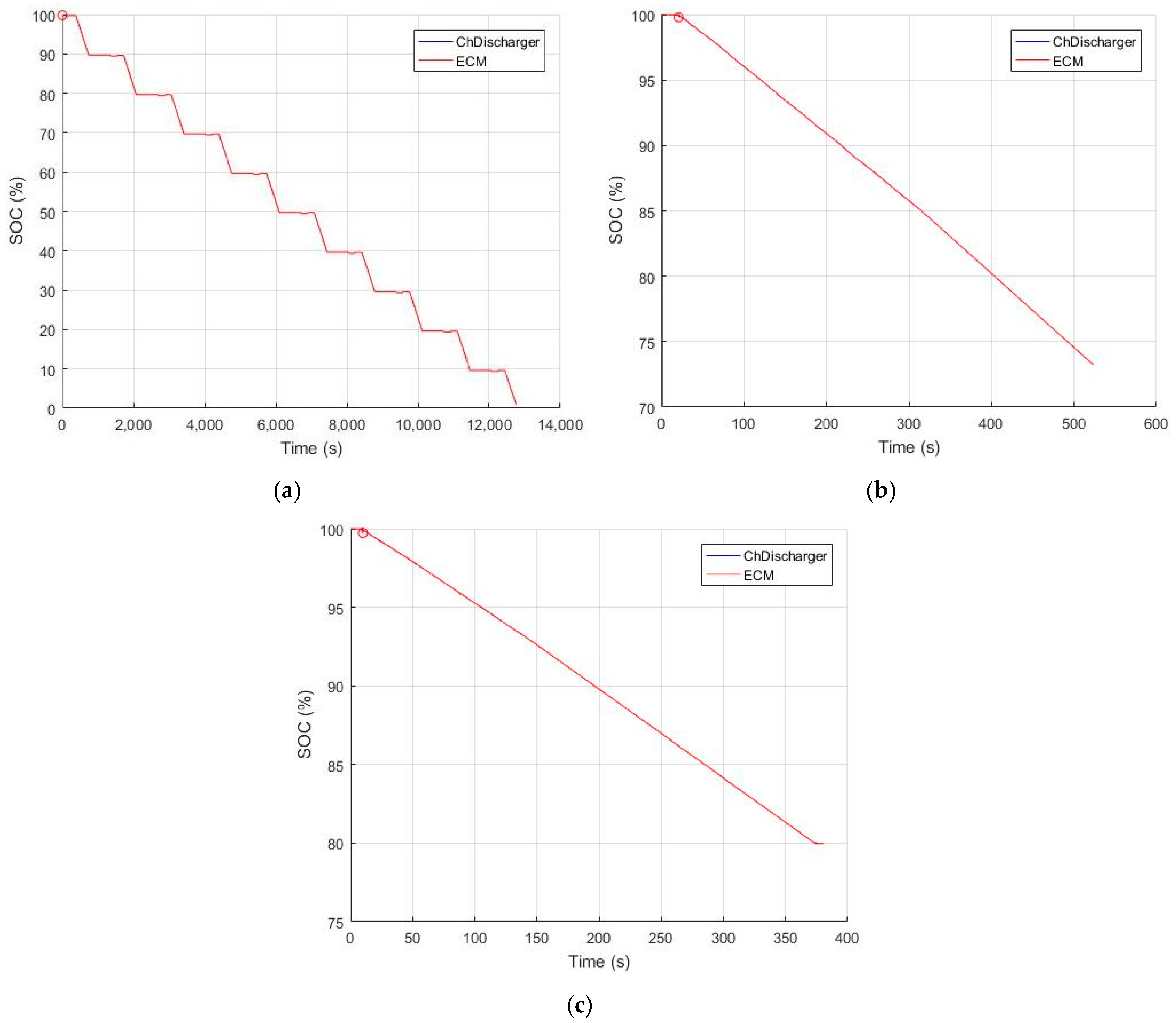
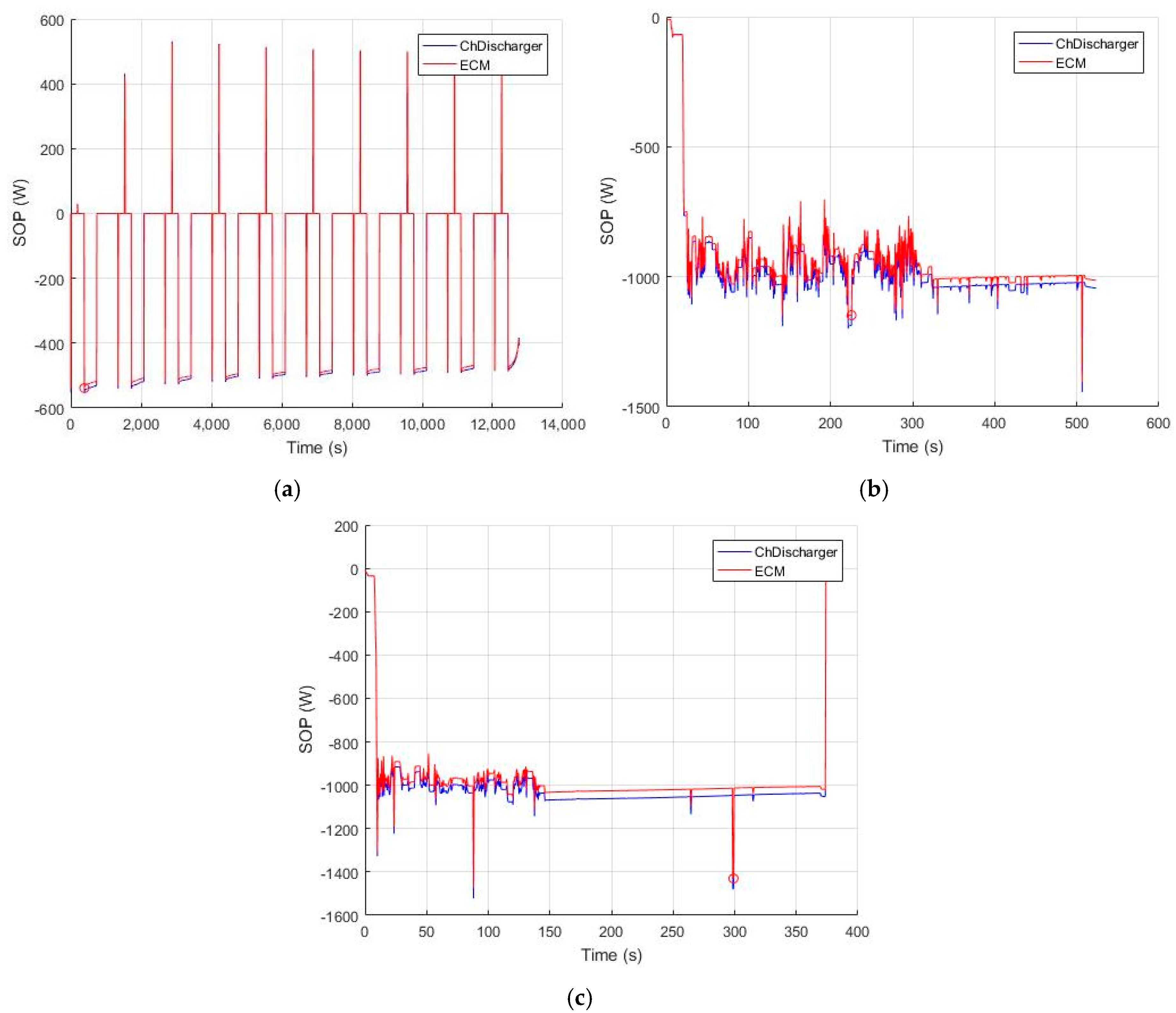
EKF-based battery SOC and SOP estimation methods are described. According to the indoor and outdoor test results, the most accurate and SOC estimations occur when the EKF is applied with , but the most accurate SOP estimation occurs when the EKF is not applied with . Analysis results show that the maximum SOC estimation error turns out to be 0.1477% (indoor test with HPPC), 0.1324% (outdoor test with 0 kg payload), and 0.2021% (outdoor test with 10 kg payload). Also, the maximum SOP estimation error turns out to be 1.2% (indoor test with HPPC), 3.6% (outdoor test with 0 kg payload), and 4.2% (outdoor test with 10 kg payload). These results show that, in contrast to the SOC calculation, the EKF method is not as beneficial as the current integration method in the case of calculating the SOP.
One of the novel contributions of this paper is the development of the SOC and SOP estimation logics, including the accompanying equations and algorithms shown in
Section 2.3 and
Section 2.4. In particular, we have demonstrated unique methods to find the maximum discharging current considering the individual cell voltage that is necessary to calculate the maximum discharging power which each cell could perform. We also used both the CF and EKF for the state estimation in contrast to the existing research papers in which only one of those was adopted. Compared to other research works, we used a real agricultural quadrotor UAV carrying 10 kg of pesticides to achieve the real-life discharging current data. With the field data, we could design more suitable parameters of the SOC and SOP estimation algorithms compared to the other researches in the sense of the estimation accuracy. In the future, we will adopt the enhanced self-correcting (ESC) ECM and unscented Kalman filter (UKF) method to improve the SOP estimation.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}