Non-Convex Economic Dispatch of a Virtual Power Plant via a Distributed Randomized Gradient-Free Algorithm


Abstract
:1. Introduction
2. VPPs’ Non-Convex Economic Dispatch
2.1. The Operation Models of the DER’s Units
2.2. Dispatch Objectives and Constraints
3. Distributed Randomized Gradient-Free (DRGF) Algorithm
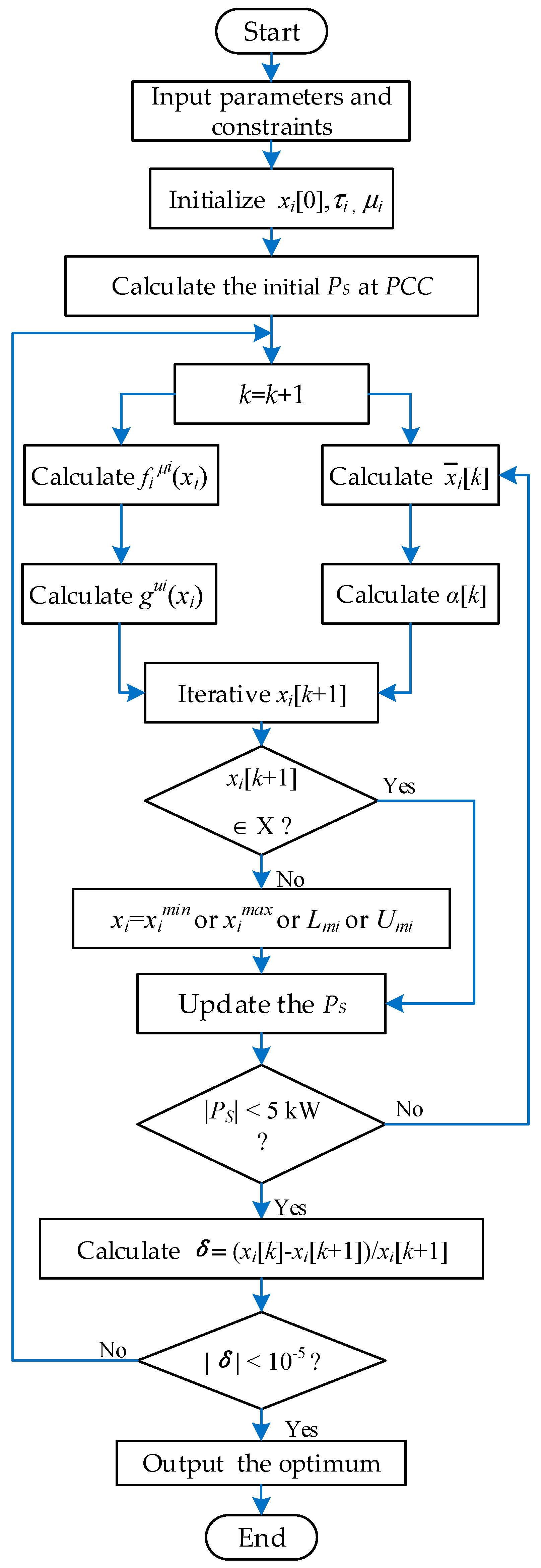
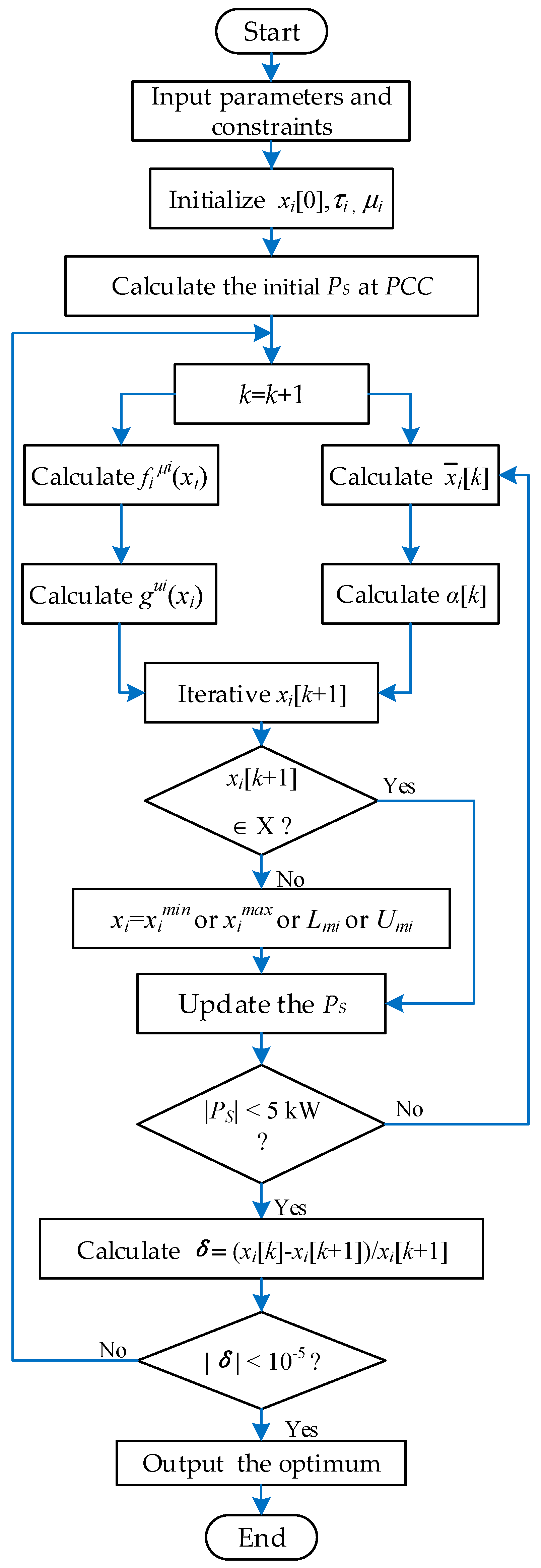
- The input data includes the coefficients of cost functions, various limits of the DERs’ power output, the total load demand, etc. The maximum available power output of the REs is calculated by formula (8) and (9).
- According to formula (14), calculate the initial PS at PCC.
- Correct the iteration step by k = k + 1, where the initial number of iteration steps is k = 1.
- According to formula (17), calculate the weighted mean values; and according to formula (19), calculate the Gauss approximation. When DGs have multiple fuel options, as shown in equation (2), select the cost function curves on the basis of the DG’s actual power output.
- According to formula (20), calculate distributed randomized gradient-free oracles; according to formula (22), calculate the current iteration step by .
- According to formula (21), implement the optimal iteration of the power output variables.
- Determine whether the current variables are within the available space. If they satisfy, proceed to the next step; otherwise, the variables take the upper () or lower () limits of the constraints. When variable xi falls into prohibited zone mi during the decreasing process, such as xi [k] > xi [k + 1], its value will be set at the upper boundary Umi. Additionally, when xi falls into prohibited zone mi during the increasing process, such as xi [k] < xi [k + 1], the value will be set at the lower boundary Lm.
- According to formula (14), update the initial PS at PCC.
- Determine whether the current power imbalance satisfies the allowable value. If it satisfies, proceed to the next step; otherwise, return to step (5) to recalculate the weighted mean values.
- Calculate the iteration error.
- Determine whether the iteration error satisfies the allowable value. If it satisfies, proceed to the next step; otherwise, return to step (4) for the next iteration.
- Output the optimal solution vector.
4. Numerical Examples
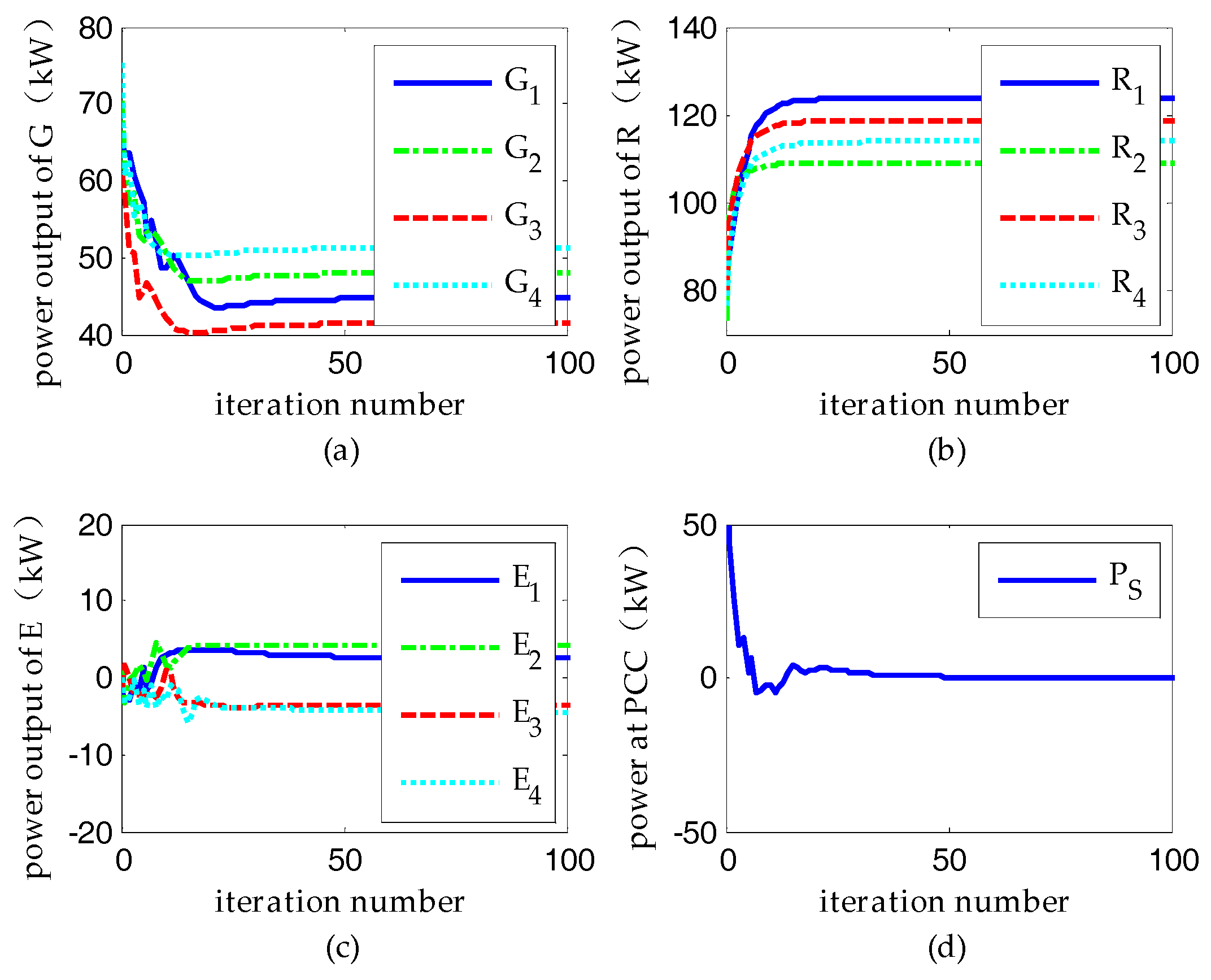
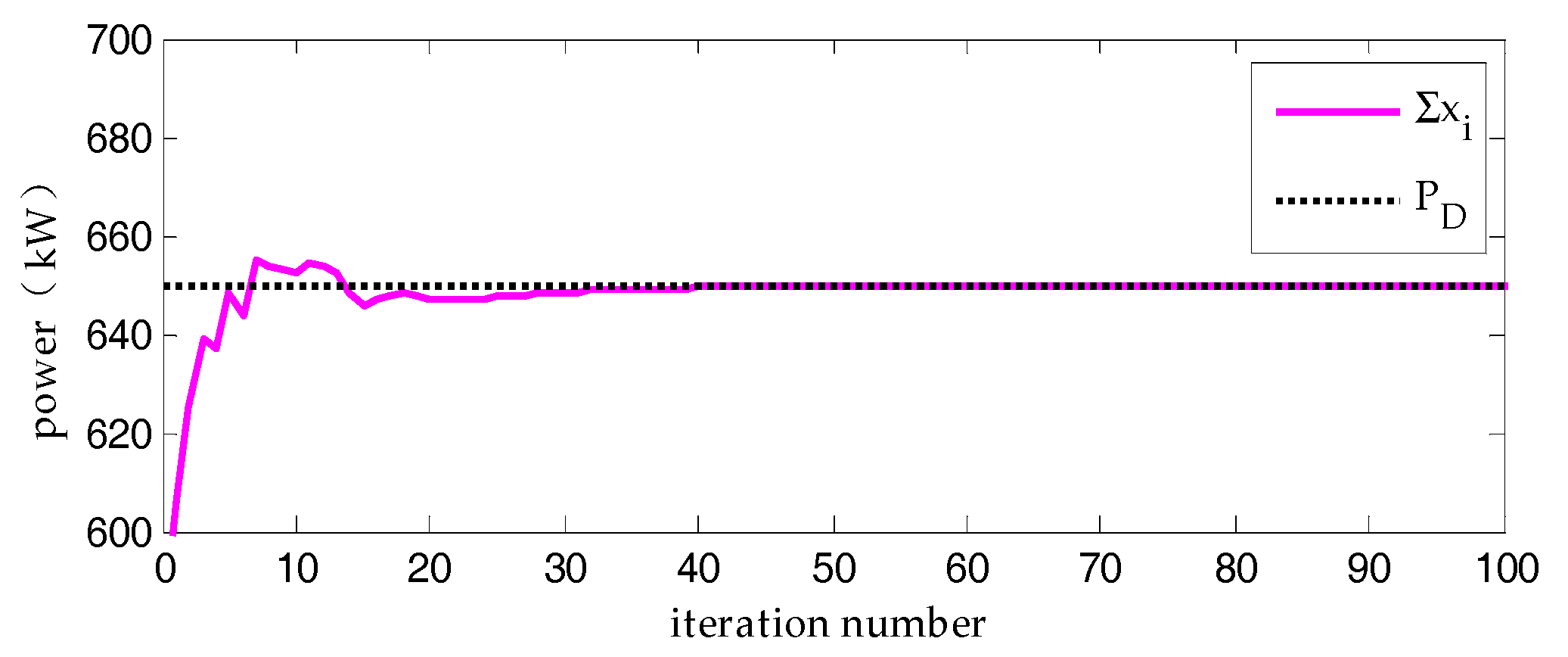
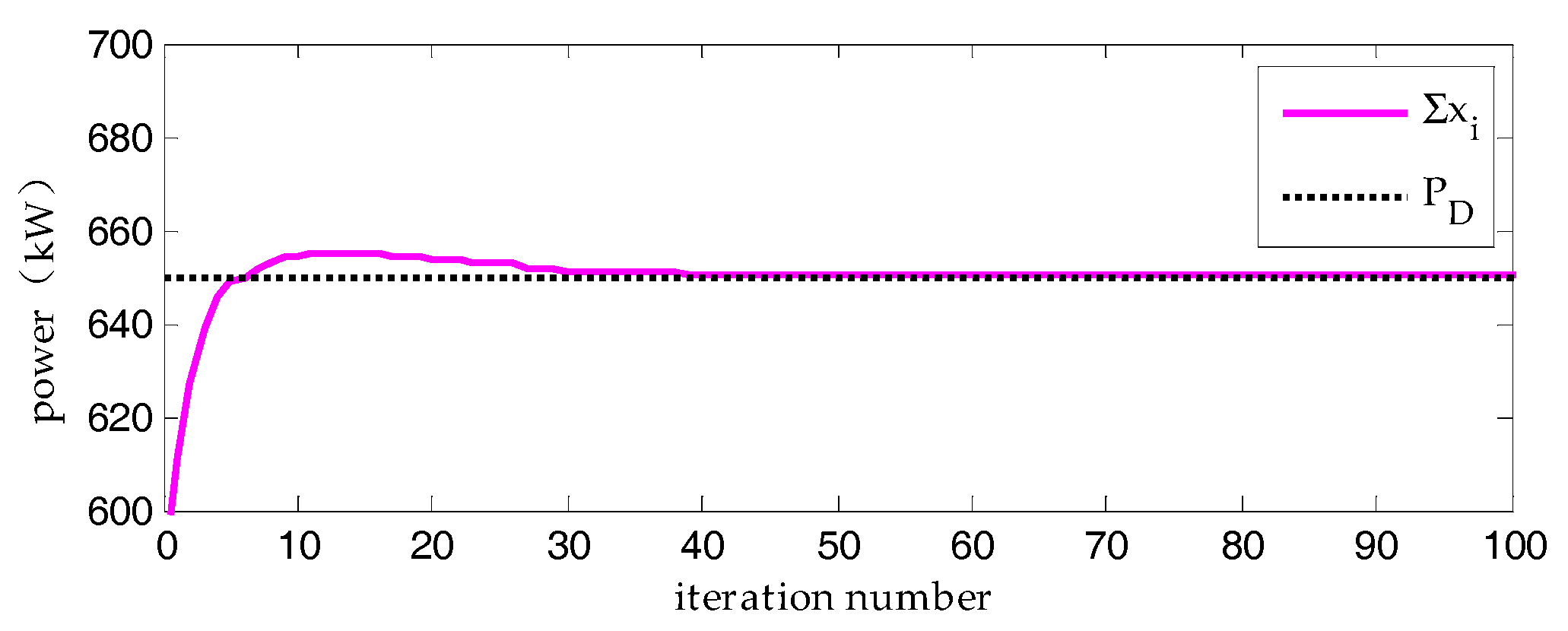
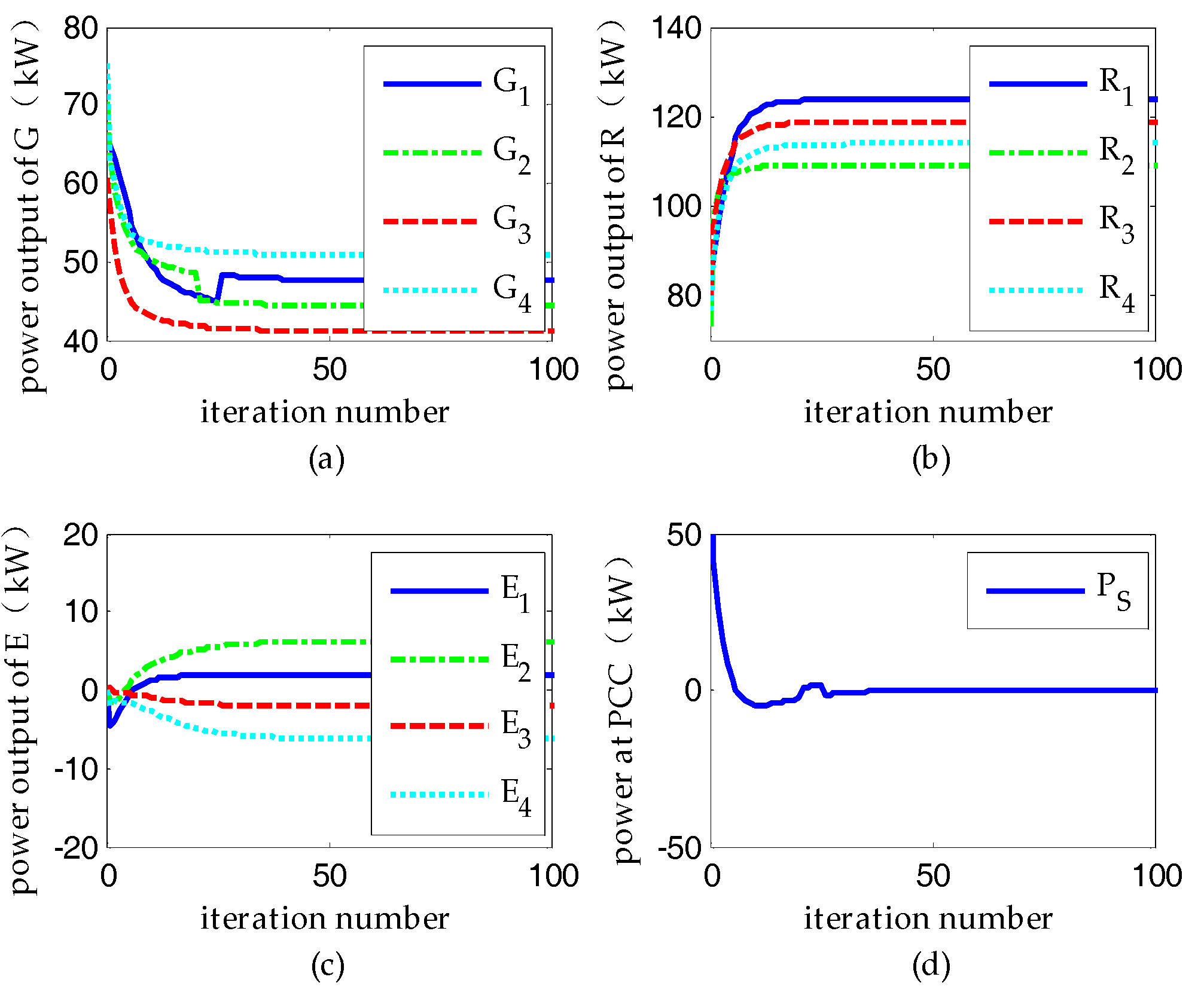
4.1. Scenario A: The VPP’s Distributed Economic Dispatch with Valve-Point Loading Effects
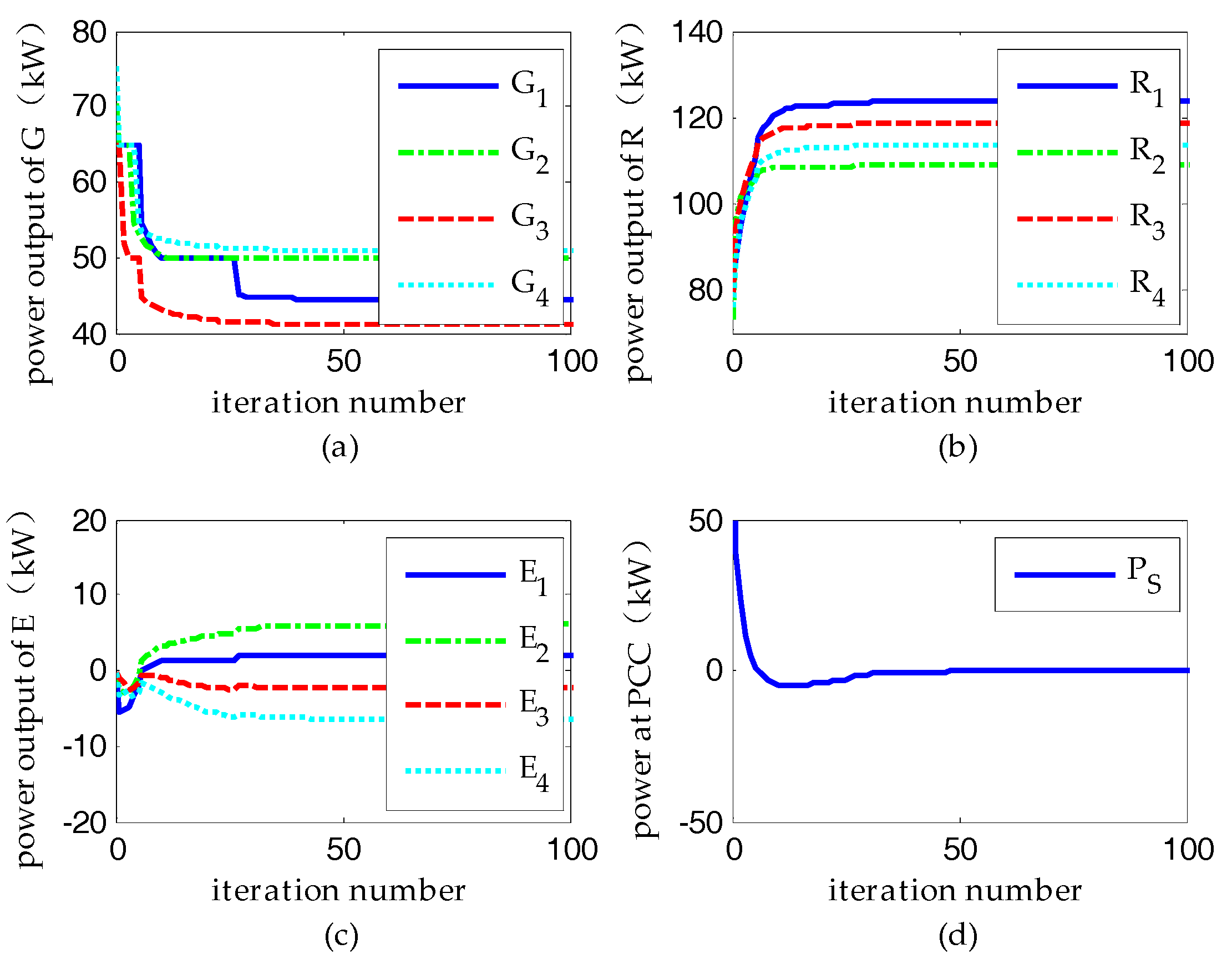
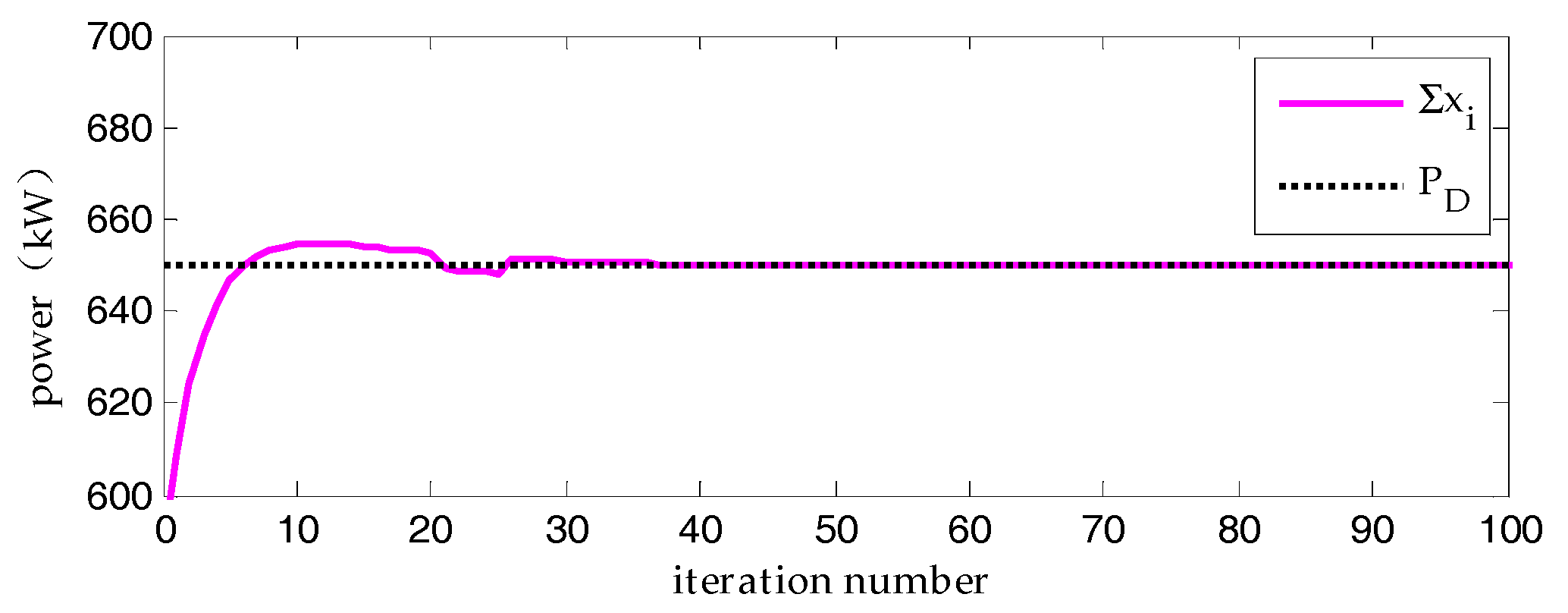
4.2. Scenario B: The VPP’s Distributed Economic Dispatch with Prohibited Operating Zones
4.3. Scenario C: the VPP’s Distributed Economic Dispatch with Multiple Fuel Options
5. Summary
Acknowledgment
Author Contributions
Conflicts of Interest
Appendix A
References
- Safdarian, A.; Firuzabad, M.F.; Lehtonen, M.; Aminifar, F. Optimal electricity procurement in smart grids with autonomous distributed energy resources. IEEE Trans. Smart Grid 2015, 6, 2975–2984. [Google Scholar] [CrossRef]
- Lin, C.E.; Viviani, G.L. Hierarchical economic dispatch for piecewise quadratic cost functions. IEEE Trans. Power Appl. Syst. 1984, 103, 1170–1175. [Google Scholar] [CrossRef]
- Lin, W.M.; Chen, S.J. Bid-based dynamic economic dispatch with an efficient interior point algorithm. Int. J. Electr. Power Energy Syst. 2002, 24, 51–57. [Google Scholar] [CrossRef]
- Pattanaik, J.K.; Basu, M.; Dash, D.P. Review on application and comparison of metaheuristic techniques to multi-area economic dispatch problem. Prot. Control Mod. Power Syst. 2017, 2, 2–11. [Google Scholar] [CrossRef]
- Teng, J.H.; Luan, S.W.; Lee, D.J.; Huang, Y.Q. Optimal charging/discharging scheduling of battery storage systems for distribution systems interconnected with sizeable PV generation systems. IEEE Trans. Power Syst. 2013, 28, 1425–1433. [Google Scholar] [CrossRef]
- Pudjianto, D.; Ramsay, C.; Strbac, G. Virtual power plant and system integration of distributed energy resources. IET Renew. Power Gener. 2007, 1, 10–16. [Google Scholar] [CrossRef]
- Ai, Q.; Fan, S.L.; Piao, L.J. Optimal scheduling strategy for virtual power plants based on credibility theory. Prot. Control Mod. Power Syst. 2016, 1, 1–8. [Google Scholar] [CrossRef]
- Chiang, C. L. Improved genetic algorithm for power economic dispatch of units with valve-point effects and multiple fuels. IEEE Trans. Power Syst. 2005, 20, 1690–1699. [Google Scholar] [CrossRef]
- Selvakumar, A.I.; Thanushkodi, K. A new particle swarm optimization solution to nonconvex economic dispatch problems. IEEE Trans. Power Syst. 2007, 22, 42–51. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhyay, P.K. Hybrid differential evolution with biogeography based optimization for solution of economic load dispatch. IEEE Trans. Power Syst. 2010, 25, 1955–1964. [Google Scholar] [CrossRef]
- Pattanaik, J.K.; Basu, M.; Dash, D.P. Opposition-based differential evolution for hydrothermal power system. Prot. Control Mod. Power Syst. 2017, 1, 1–17. [Google Scholar] [CrossRef]
- Binetti, G.; Davoudi, A.; Naso, D.; Turchiano, B.; Lewis, F.L. A distributed auction-based algorithm for the non-convex economic dispatch problem. IEEE Trans. Ind. Inf. 2014, 10, 1124–1132. [Google Scholar] [CrossRef]
- Yang, Q.; Barria, J.A.; Green, T.C. Communication infrastructures for distributed control of power distribution networks. IEEE Trans. Ind. Inf. 2011, 7, 316–327. [Google Scholar] [CrossRef]
- Rahbari-Asr, N.; Unnati, O.; Zhang, Z.; Chow, M.Y. Incremental welfare consensus algorithm for cooperative distributed generation/demand response in smart grid. IEEE Trans. Smart Grid 2014, 5, 2836–2845. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, W.; Wang, X. Online optimal generation control based on constrained distributed gradient algorithm. IEEE Trans. Power Syst. 2015, 30, 35–45. [Google Scholar] [CrossRef]
- Yang, H.M.; Yi, D.X.; Zhao, J.H.; Dong, Z.Y. Distributed optimal dispatch of virtual power plant via limited communication. IEEE Trans. Power Syst. 2013, 28, 3511–3512. [Google Scholar] [CrossRef]
- Cao, C.; Xie, J.; Yue, D.; Huang, C.X.; Wang, J.X.; Xu, S.Y.; Chen, X.Y. Distributed Economic Dispatch of Virtual Power Plant under Non-ideal Communication Network. Energies 2017, 10, 235. [Google Scholar] [CrossRef]
- Yuan, D.M.; Ho Daniel, W.C. Randomized gradient-free method for multi agent optimization over time-varying networks. IEEE Trans. Neural Learn. Syst. 2015, 26, 1342–1347. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.Q.; Xiang, J.; Li, Y.J. Distributed consensus based supply–demand balance algorithm for economic dispatch problem in a smart grid with switching graph. IEEE Trans. Ind. Electron. 2017, 64, 1600–1610. [Google Scholar] [CrossRef]
- Lu, X.N.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L.P. State-of-charge balance using adaptive droop control for distributed energy storage systems in DC micro-grid applications. IEEE Trans. Ind. Electron. 2014, 61, 2804–2815. [Google Scholar] [CrossRef]
- Wang, Y.; Ai, X.; Tan, Z.F.; Yan, L.; Liu, S.T. Interactive Dispatch Modes and Bidding Strategy of Multiple Virtual Power Plants Based on Demand Response and Game Theory. IEEE Trans. Smart Grid 2016, 7, 510–519. [Google Scholar] [CrossRef]
- Gavanidou, E.S.; Bakirtzis, A.G. Design of a stand alone system with renewable energy sources using trade off methods. IEEE Trans. Energy Convers. 1992, 7, 42–48. [Google Scholar] [CrossRef]
- John, H.; David, C.Y.; Kalu, B. An economic dispatch model incorporating wind Power. IEEE Trans. Energy Convers. 2008, 23, 603–611. [Google Scholar]
- Nesterov, Y.; Spokoiny, V. Random gradient-free minimization of convex functions. Found. Comput. Math. 2017, 17, 527–566. [Google Scholar] [CrossRef]
- Nedic, A.; Ozdaglar, A.; Parrilo, P.A. Constrained consensus and optimization in multi-agent networks. IEEE Trans. Autom. Control 2010, 55, 922–938. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DERs Units | Fuel Type | ($/kWh) | Operation Range (kW) | ||||
|---|---|---|---|---|---|---|---|
| ai | bi | ci | di | ei | |||
| DG 1 | 1 | 0.0751 | 25.734 | 996.57 | 310 | 0.053 | 40–55 |
| 2 | 0.0578 | 21.462 | 996.57 | 295 | 0.048 | 55–80 | |
| DG 2 | 1 | 0.0814 | 21.215 | 1002.1 | 225 | 0.062 | 40–55 |
| 2 | 0.0581 | 19.893 | 1002.1 | 218 | 0.061 | 55–80 | |
| DG 3 | 1 | 0.0857 | 22.188 | 1058.3 | 436 | 0.042 | 40–55 |
| 2 | 0.0596 | 22.095 | 1058.3 | 402 | 0.041 | 55–80 | |
| DG 4 | 1 | 0.0704 | 28.026 | 978.52 | 289 | 0.046 | 40–55 |
| 2 | 0.0672 | 27.684 | 978.52 | 275 | 0.039 | 55–80 | |
| Operation Parameters | Values |
|---|---|
| γ1, γ2, γ3 | 0.05, 0.2, 0.15 |
| SOC(min, down, up, max) | 0.05, 0.20, 0.80, 0.95 |
| [L1, U1], [L2, U2] | [45, 50], [55, 65] (kW) |
| ρrV, ρrW, ρd, ρS | 0.0839, 0.0721, 0.0780, 0.0736 ($/kWh) |
| Ei; EC; Pmax(ch, dch) | 85%; 100 (kWh); 20, 20 (kW) |
| Pr; v, vci, vco, vr | 120 (kW); 12, 3.0, 25, 15 (m/s) |
| PVmax; GCmax, GC; K; Tr, Tc | 180 (kW); 1, 0.9 (kw/m2); −0.45%; 25, 18 (°C) |
| Distributed Energy Resources(DERs) Units | The Optimization Results (kW) | ||
|---|---|---|---|
| Scenarios A | Scenarios B | Scenarios C | |
| Distributed Generator (DG) 1 | 44.6364 | 44.4128 | 47.6625 |
| Distributed Generator (DG) 2 | 47.8850 | 50.0000 | 44.4135 |
| Distributed Generator (DG) 3 | 41.3855 | 41.1637 | 41.1637 |
| Distributed Generator (DG) 4 | 51.1345 | 50.9133 | 50.9136 |
| Renewable Energy (RE) 1 | 123.7492 | 123.5162 | 123.7500 |
| Renewable Energy (RE) 2 | 109.0612 | 108.8276 | 109.0614 |
| Renewable Energy (RE) 3 | 118.8540 | 118.6203 | 118.8541 |
| Renewable Energy (RE) 4 | 113.9585 | 113.7249 | 113.9587 |
| Energy Storage (ES) 1 | 2.6756 | 1.8496 | 2.0834 |
| Energy Storage (ES) 2 | 4.2515 | 6.0170 | 6.2511 |
| Energy Storage (ES) 3 | −3.4227 | −2.3173 | −2.0838 |
| Energy Storage (ES) 4 | −4.4134 | −6.4850 | −6.2517 |
| Algorithm | The PSO [8] | The DRGF |
|---|---|---|
| Scenarios a | 0.0642 ($/kWh) | 0.0642 ($/kWh) |
| Scenarios b | 0.0645 ($/kWh) | 0.0645 ($/kWh) |
| Scenarios c | 0.0649 ($/kWh) | 0.0649 ($/kWh) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, J.; Cao, C. Non-Convex Economic Dispatch of a Virtual Power Plant via a Distributed Randomized Gradient-Free Algorithm. Energies 2017, 10, 1051. https://doi.org/10.3390/en10071051
Xie J, Cao C. Non-Convex Economic Dispatch of a Virtual Power Plant via a Distributed Randomized Gradient-Free Algorithm. Energies. 2017; 10(7):1051. https://doi.org/10.3390/en10071051
Chicago/Turabian StyleXie, Jun, and Chi Cao. 2017. "Non-Convex Economic Dispatch of a Virtual Power Plant via a Distributed Randomized Gradient-Free Algorithm" Energies 10, no. 7: 1051. https://doi.org/10.3390/en10071051