1. Introduction
Frequency is an important quality index in power systems since it indicates if the balance between the electrical load and the power supplied by generators is maintained. A large frequency deviation can harm equipment, decay load performance, cause the transmission lines to be overloaded, damage protection schemes, and ultimately lead to the frequency instability. Frequency instability is the condition where the system fails to maintain its frequency within a certain operating point. Since frequency is proportional to the rotational speed of the generator, the problem of frequency control may be directly translated into a speed control problem of turbine-generator unit.
Frequency control is constructed by three levels: primary, secondary, and tertiary control. Primary control is provided in all generating units and responds within few seconds. As soon as the imbalance occurs, the governor changes its speed with a certain proportional action. Under normal operation, the primary control can attenuate small frequency deviation, but for larger deviation, secondary control is needed. Since the primary control is nothing but the proportional control from control theoretic point of view, it cannot guarantee the zero-steady state error. Secondary control is provided to steer frequency deviation to zero. Secondary control is commonly referred as load frequency control (LFC). Following a serious situation, if the frequency is quickly dropped to a critical value, tertiary control may be required to restore the nominal frequency.
In this paper, interconnected power systems are considered. Interconnected electric power systems allow utilizing tie-lines to transmit power from one area to another area. Hence any load disruption can cause frequency fluctuation due to change of tie line power deviation. LFC aims to drive frequency deviation and tie line power deviation to zero under unknown load in power systems. The effect of the system frequency due to load power change is described by a swing equation [
1]. However, the component of power systems such as generators and loads are dynamic, thus result in uncertain parameters in the swing equation. Hence the LFC has to be able to handle the frequency under this circumstance. The LFC needs to get the frequency from all interconnected areas and its own frequency to determine the proper control effort. Because of transmission distance and filters in measurement devices, the frequency measurements are delayed which may harm the response of the LFC. Therefore, considering the measurement delay is important in designing a proper LFC.
Classical control strategies for the LFC use integral of tracking error as a control signal [
1]. However, those methods are incapable of dealing with parameter variations and nonlinearities effectively. Studies on the LFC has been reported using a suboptimal LFC regulator to handle the limitation of power systems observability [
2,
3]. Various adaptive control techniques are proposed for plant parameter changes in [
4,
5]. Despite the promising concept of adaptive controllers, the control algorithm is too complicated to implement in large scale systems and can show poor transient performance which can be critical in power systems. Several papers propose an observer for dealing with uncertain load changing in power systems with multiple areas [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16]. In [
6,
7,
8], a disturbance observer is considered to handle large-scale wind power in power systems. In these applications, the uncertainty and external disturbance are viewed as a total disturbance and rejected by an active disturbance observer proposed by [
9,
10,
11,
12,
13]. The disturbance is estimated using an extended state observer (ESO) in [
15]. However, from [
16], higher order ESO is needed to get the perfect estimation. In principle, an exact system model has to be known to design such disturbance observers, which hardly holds in practice due to uncertain parameters (e.g., inertia and damping parameters) in the system.
In this paper, a high-gain disturbance observer (HDOB)-based robust LFC [
17] is designed and applied to power systems with multiple areas in order to reject frequency deviations. The HDOB- based LFC consists of two parts: controller for the nominal model and HDOB. The control for the nominal model is designed first under the assumption that there are no uncertainties in the system under consideration. Then, a HDOB is designed to estimate all uncertainties including model uncertainties and external disturbances, and the estimated disturbance is added to the nominal control to reject uncertainties.
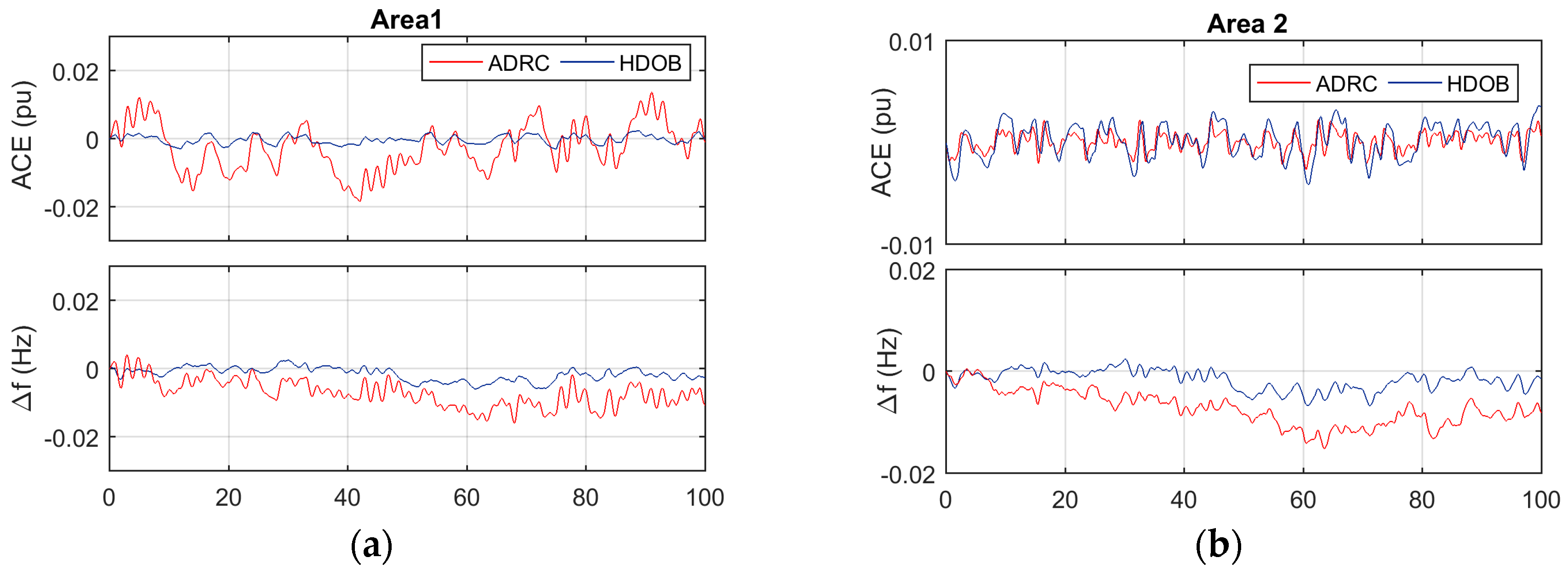
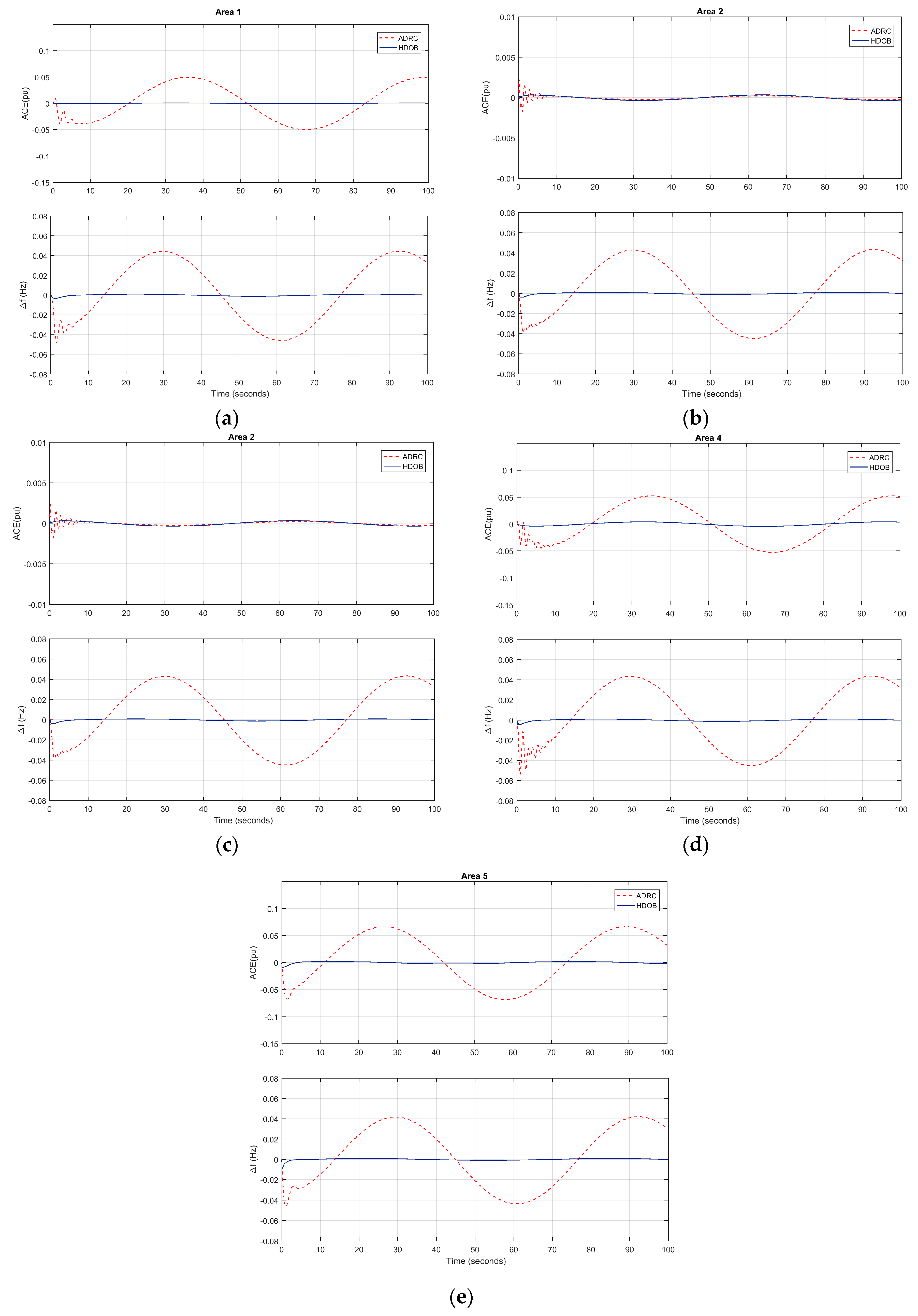
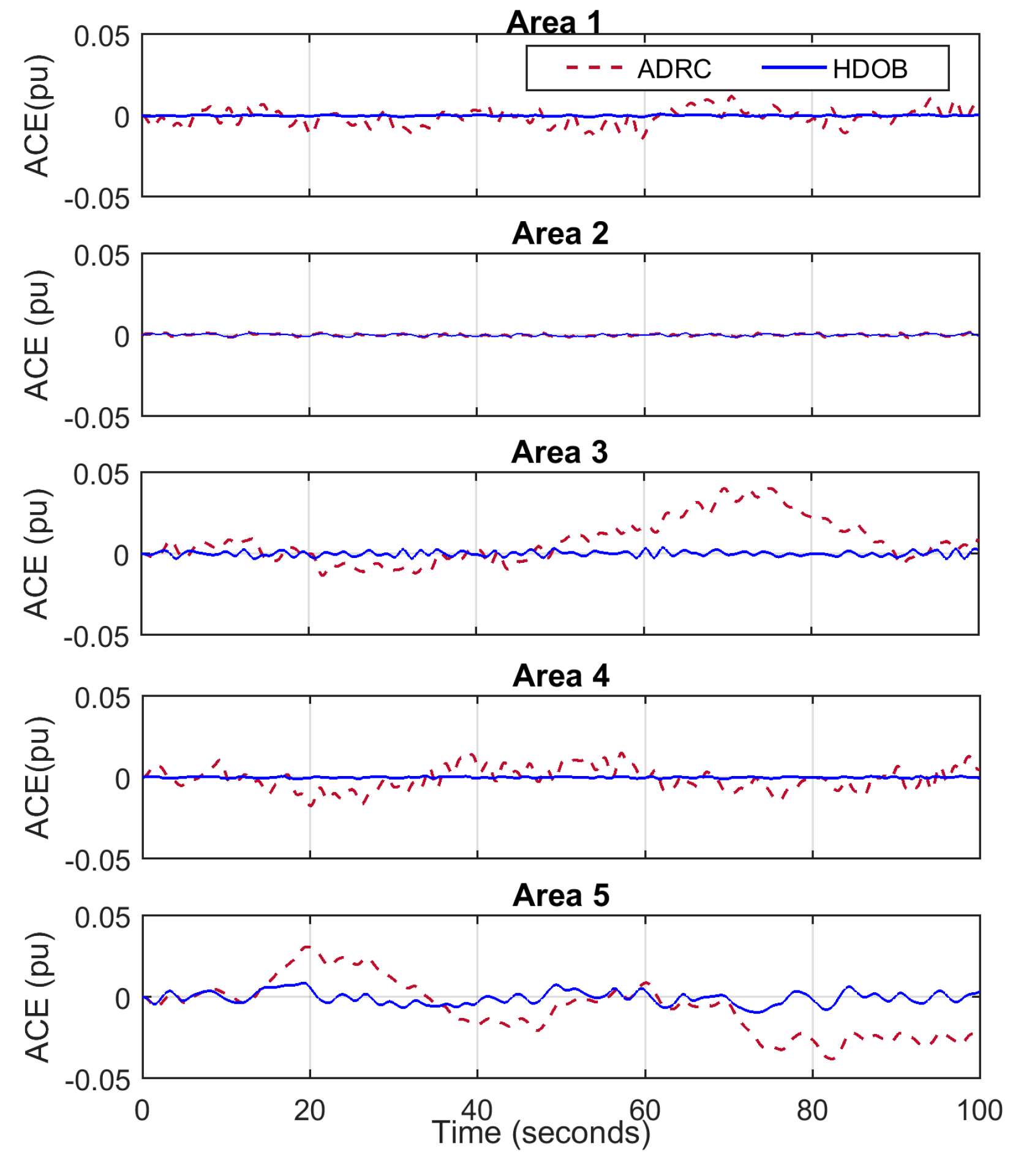
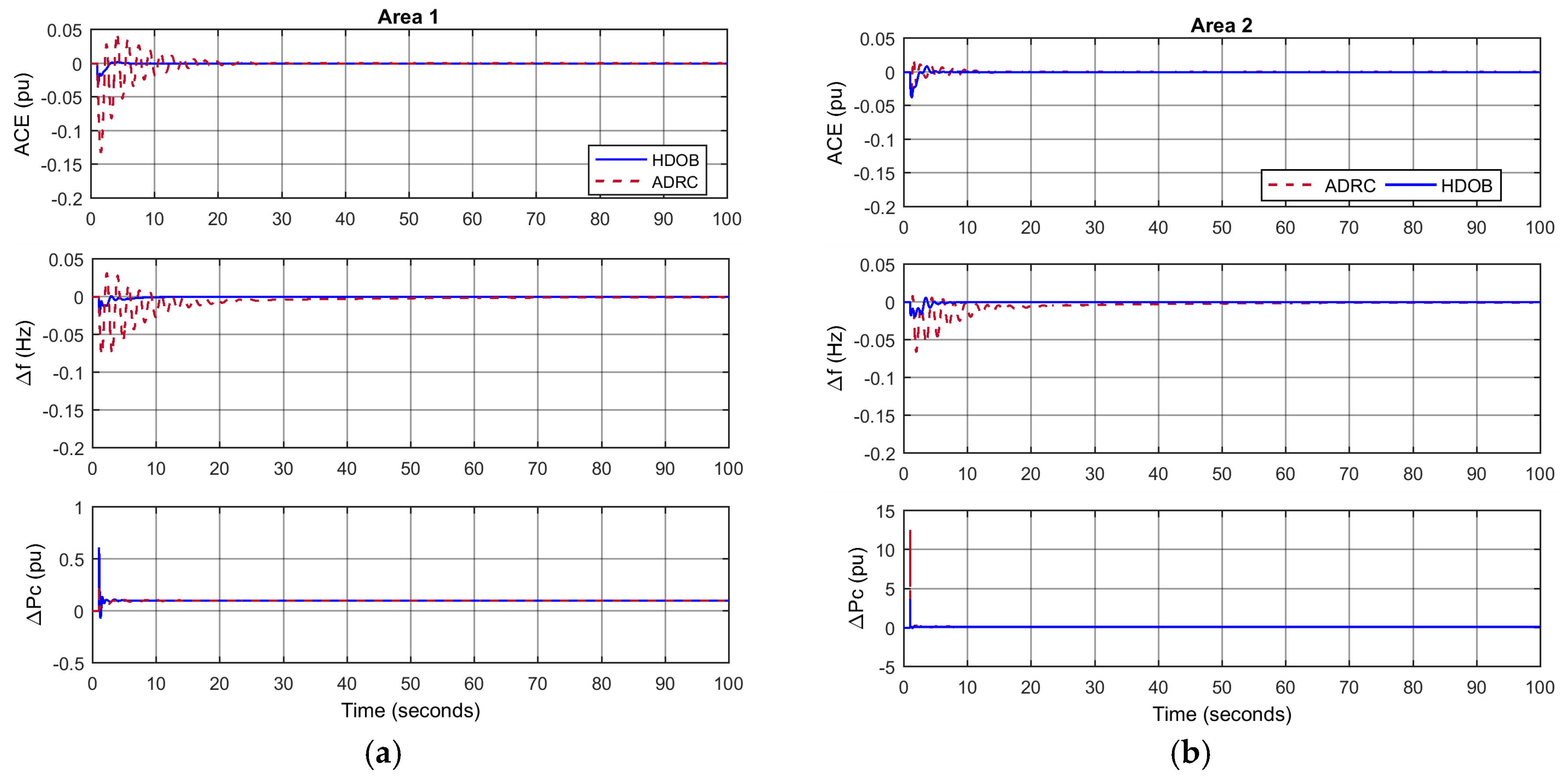
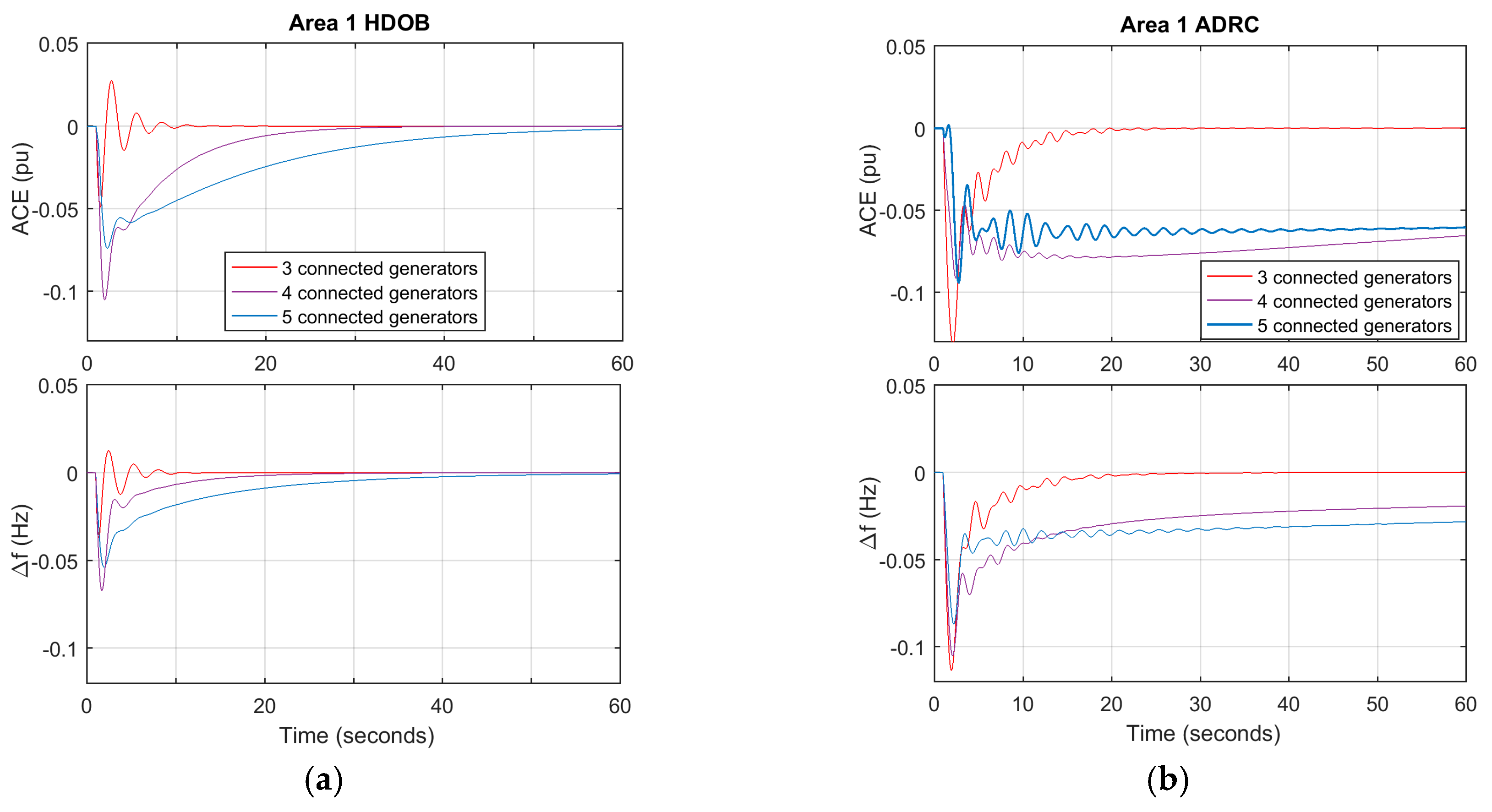
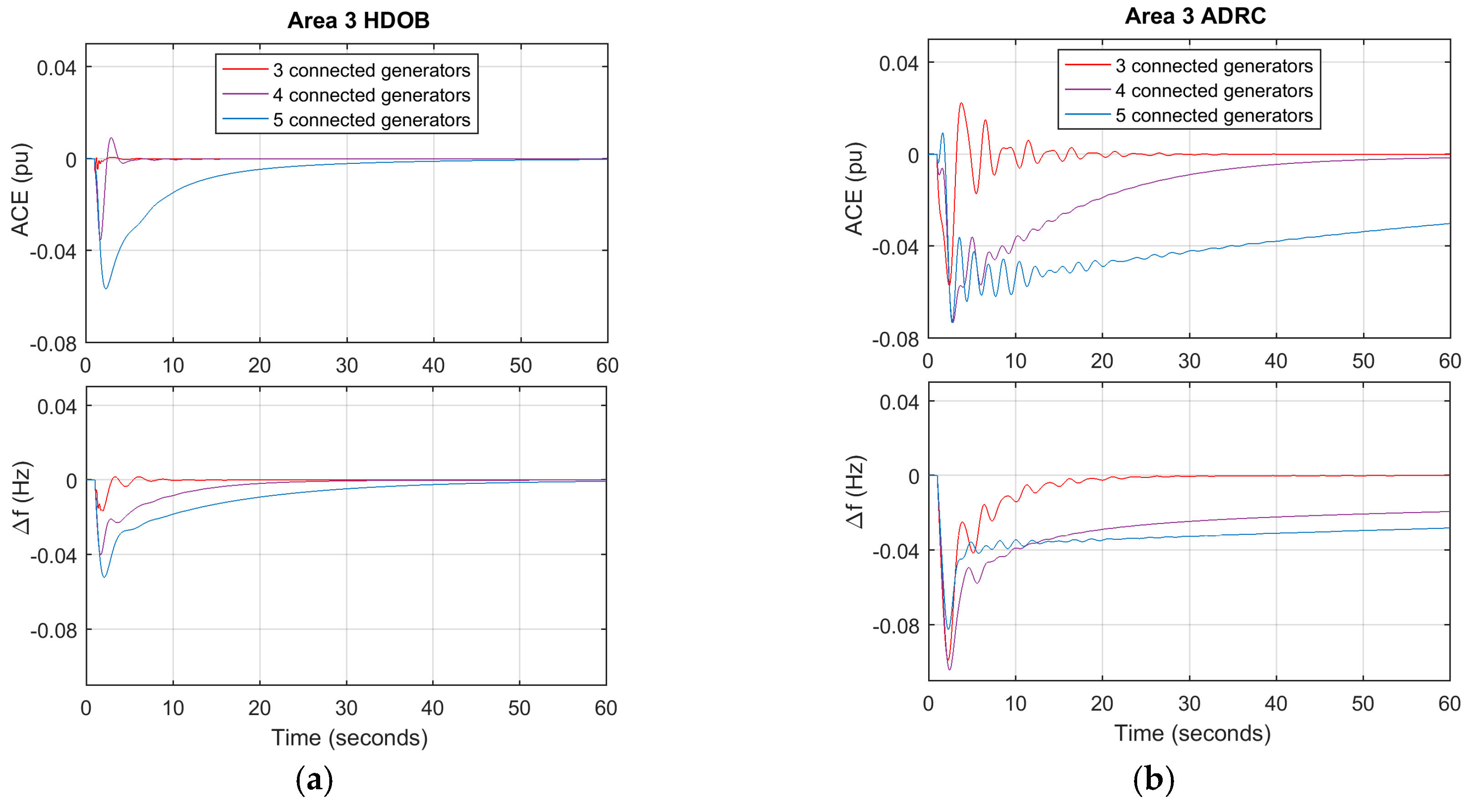
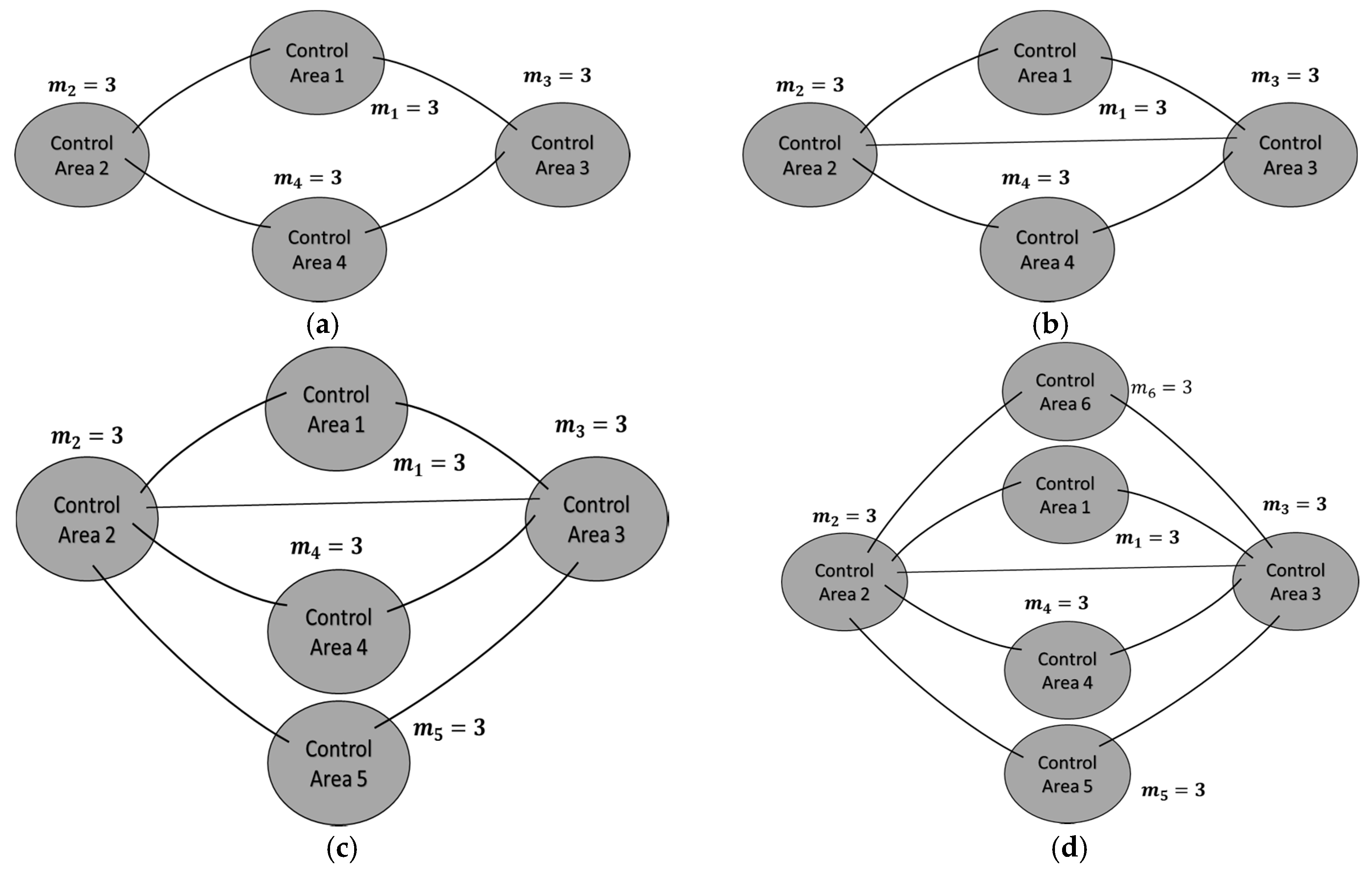
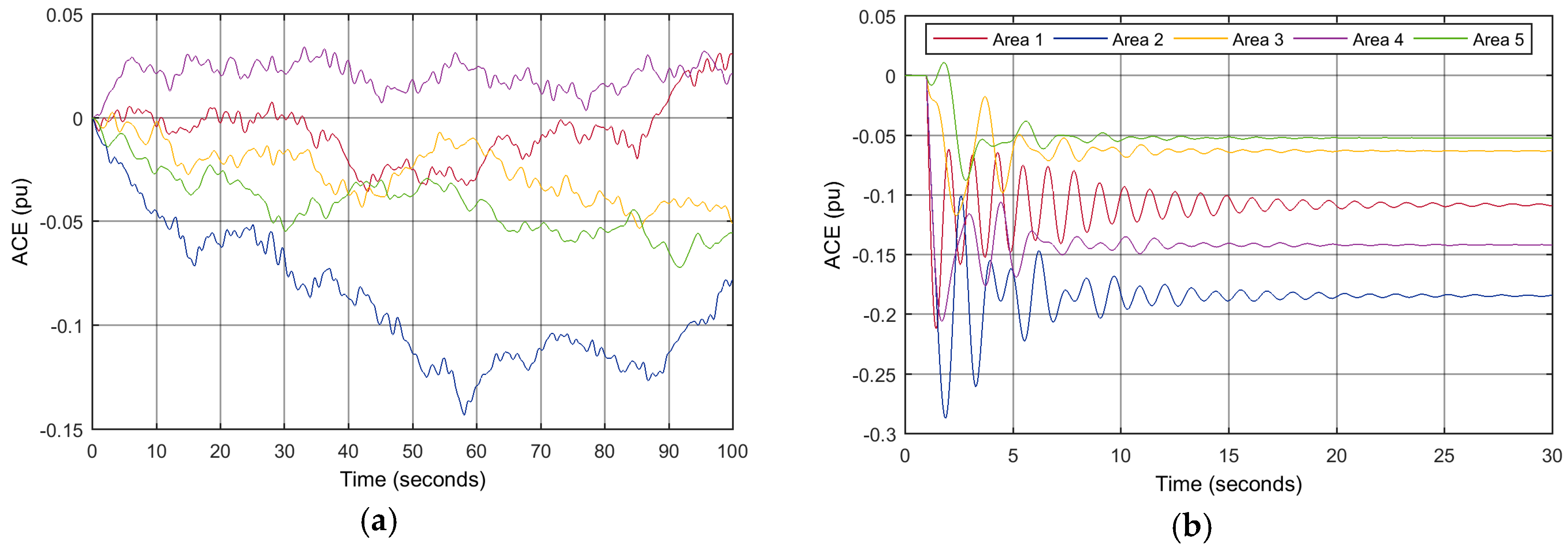
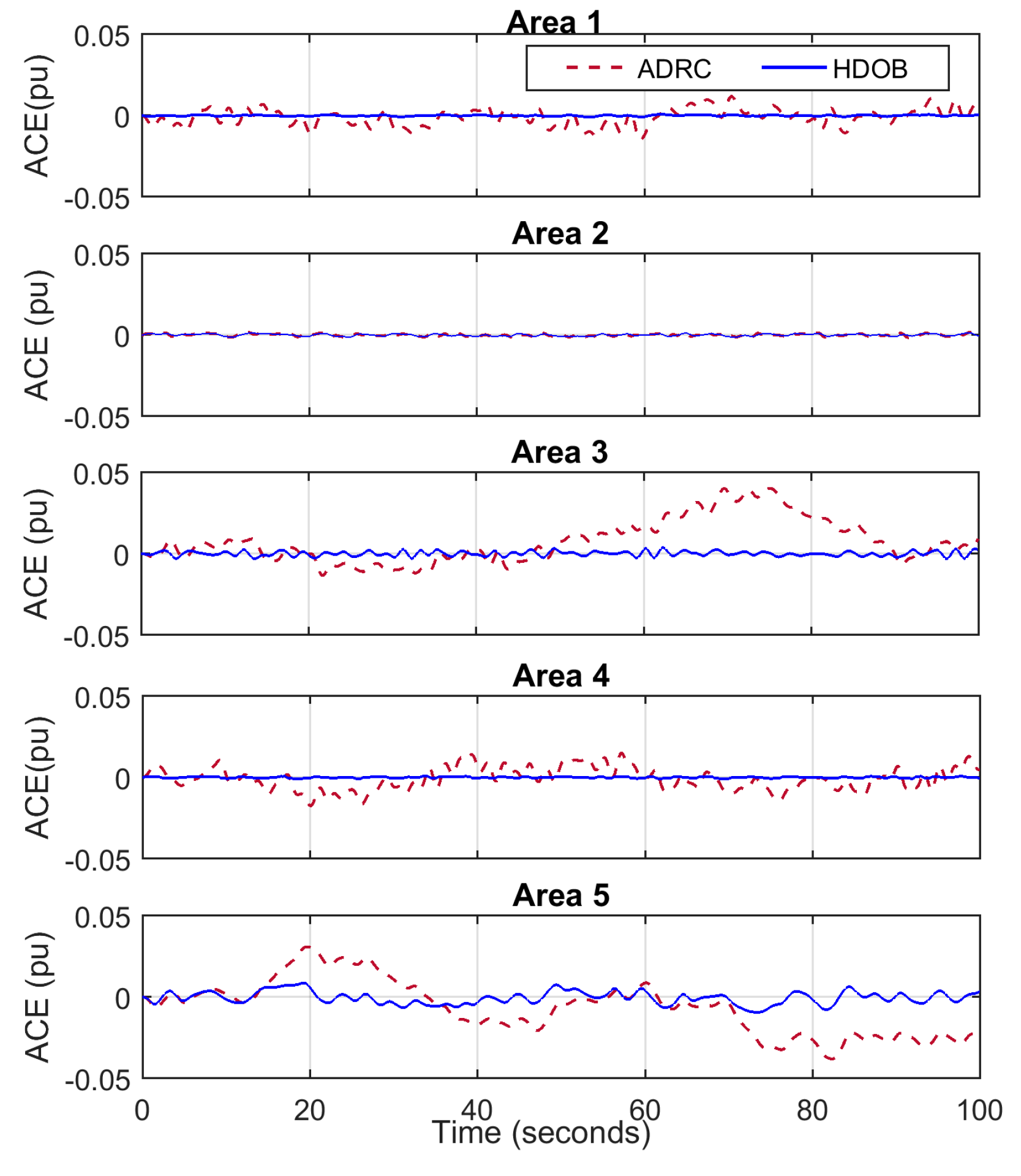
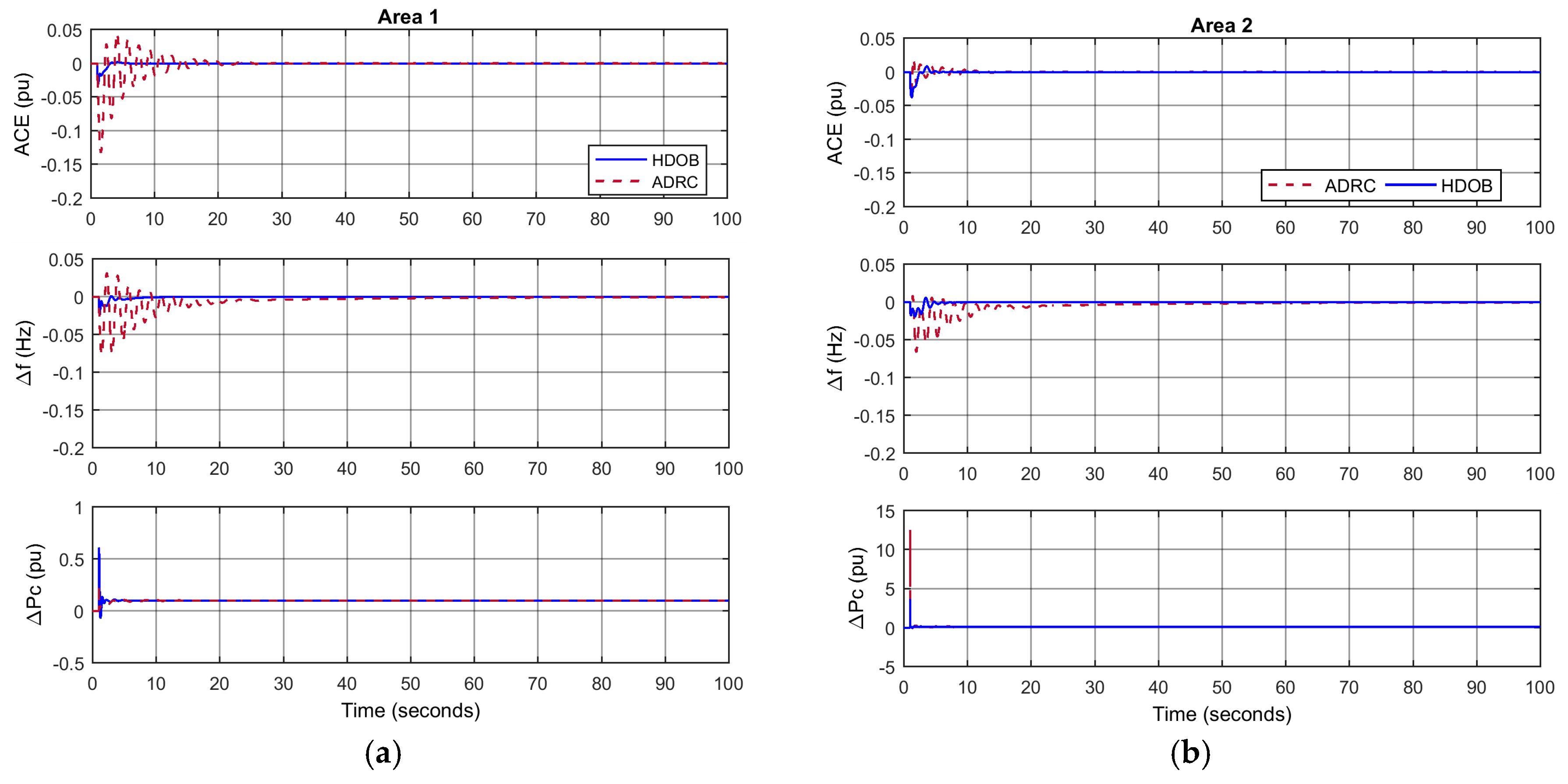
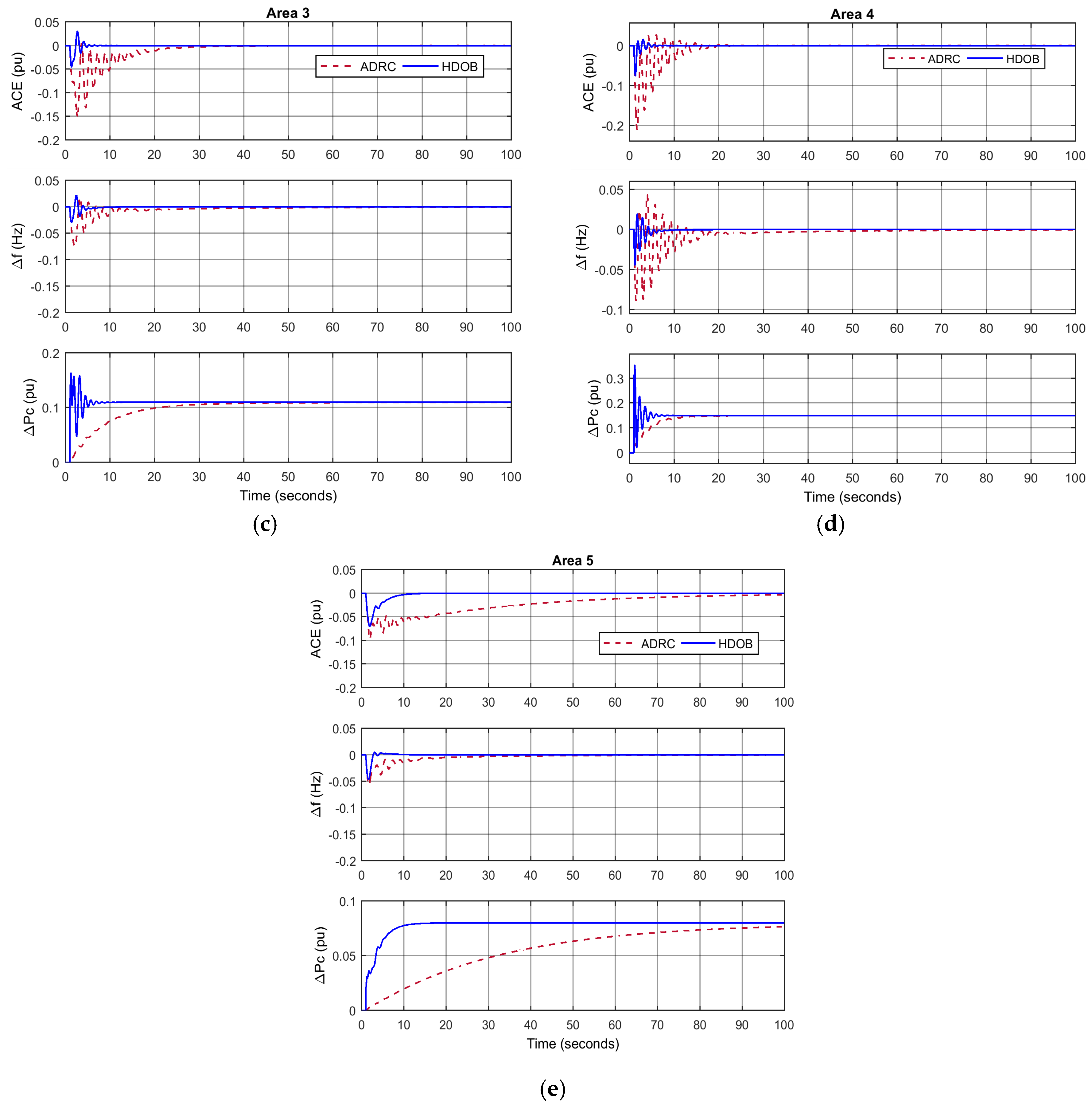
For the purpose of showing the effectiveness of the proposed scheme, three simulation results are given. One shows that the proposed HDOB-based LFC can eliminate the frequency deviation induced by load changes taking place at various locations in power systems under uncertainties in the inertia and damping parameters in the swing equation. The second simulation result demonstrates that the proposed LFC can get rid of the frequency deviation despite the measurement delay which can lead to harmful effect in existing approaches. In addition, a severe uncertainty in power systems is that a generator can trip or even one area can be disconnected from the other power systems areas due to severe fault or operational reason. So, it is necessary to investigate robustness of the proposed LFC against such topology changes. Simulation results demonstrate that the HDOB-based LFC indeed shows robustness against topologies in one area power system and between areas.
2. Dynamic Model of Power Systems with Multiple Areas
In this section, a mathematical model of power systems with multiple areas for LFC design is introduced [
1,
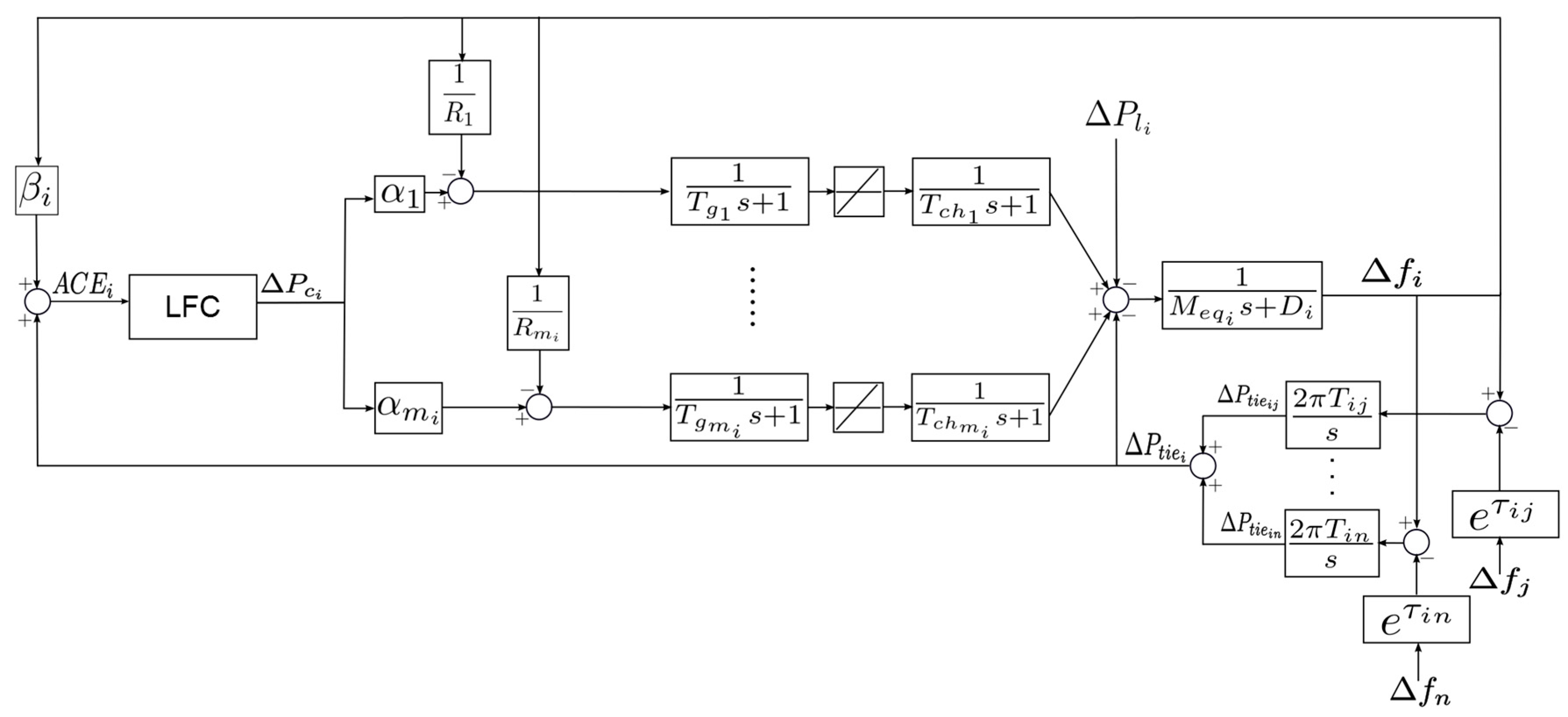
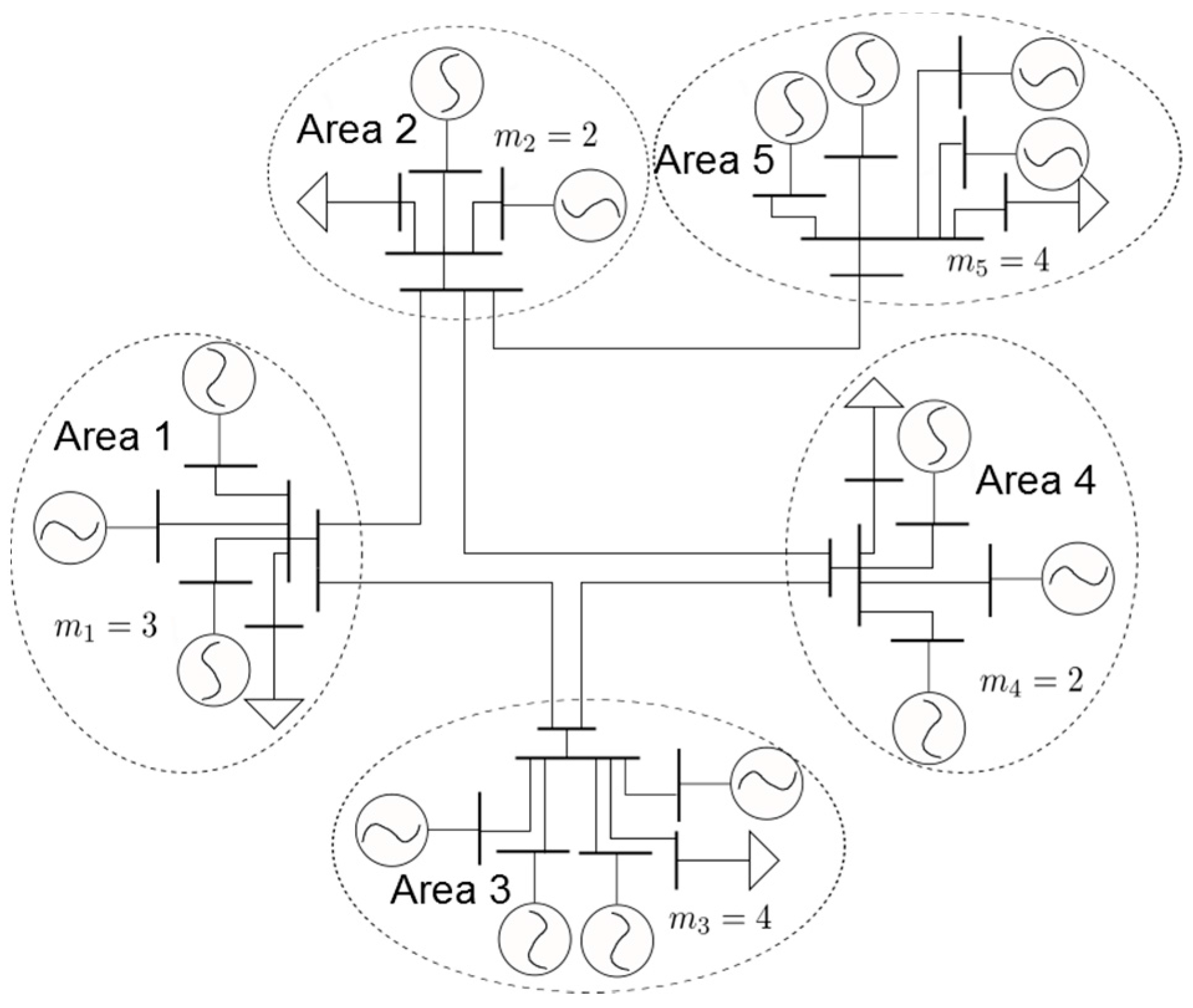
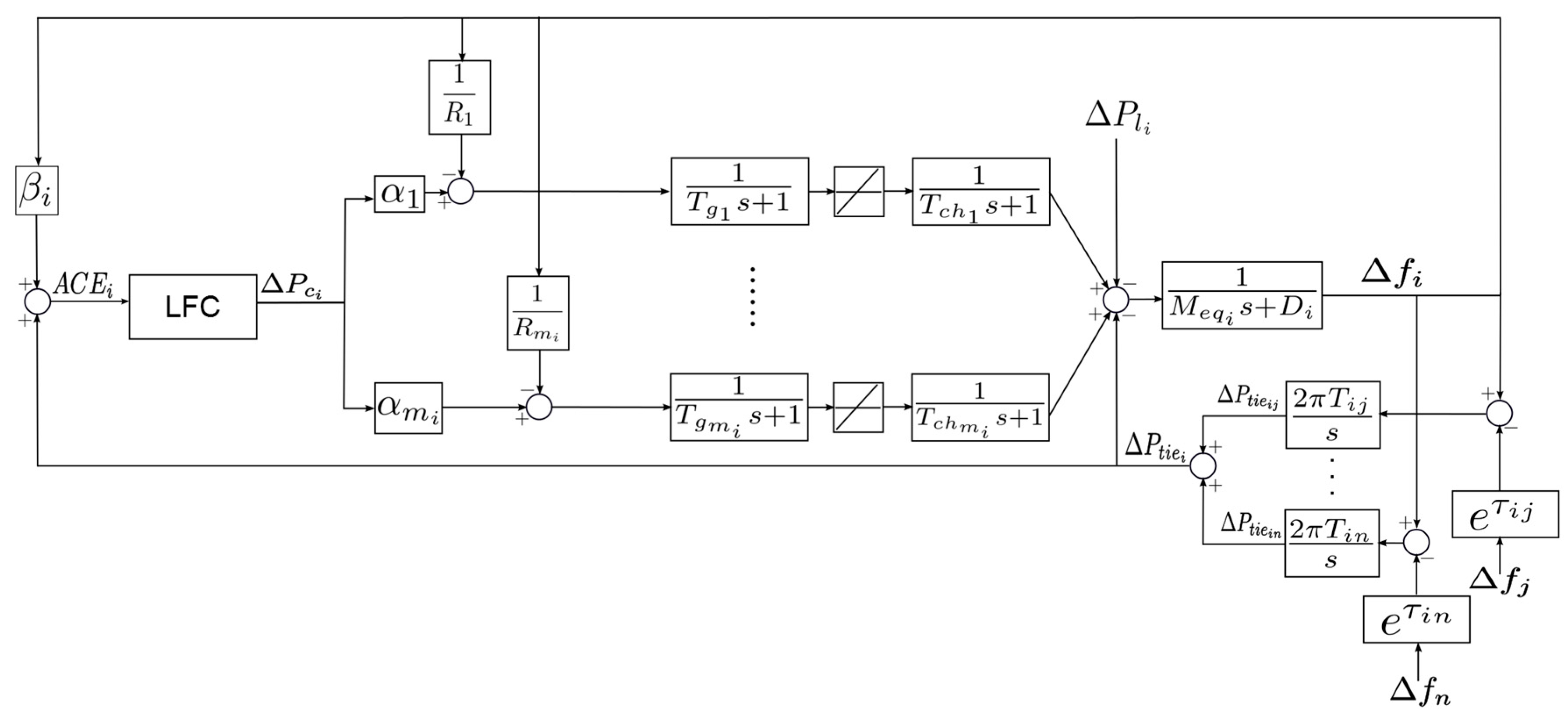
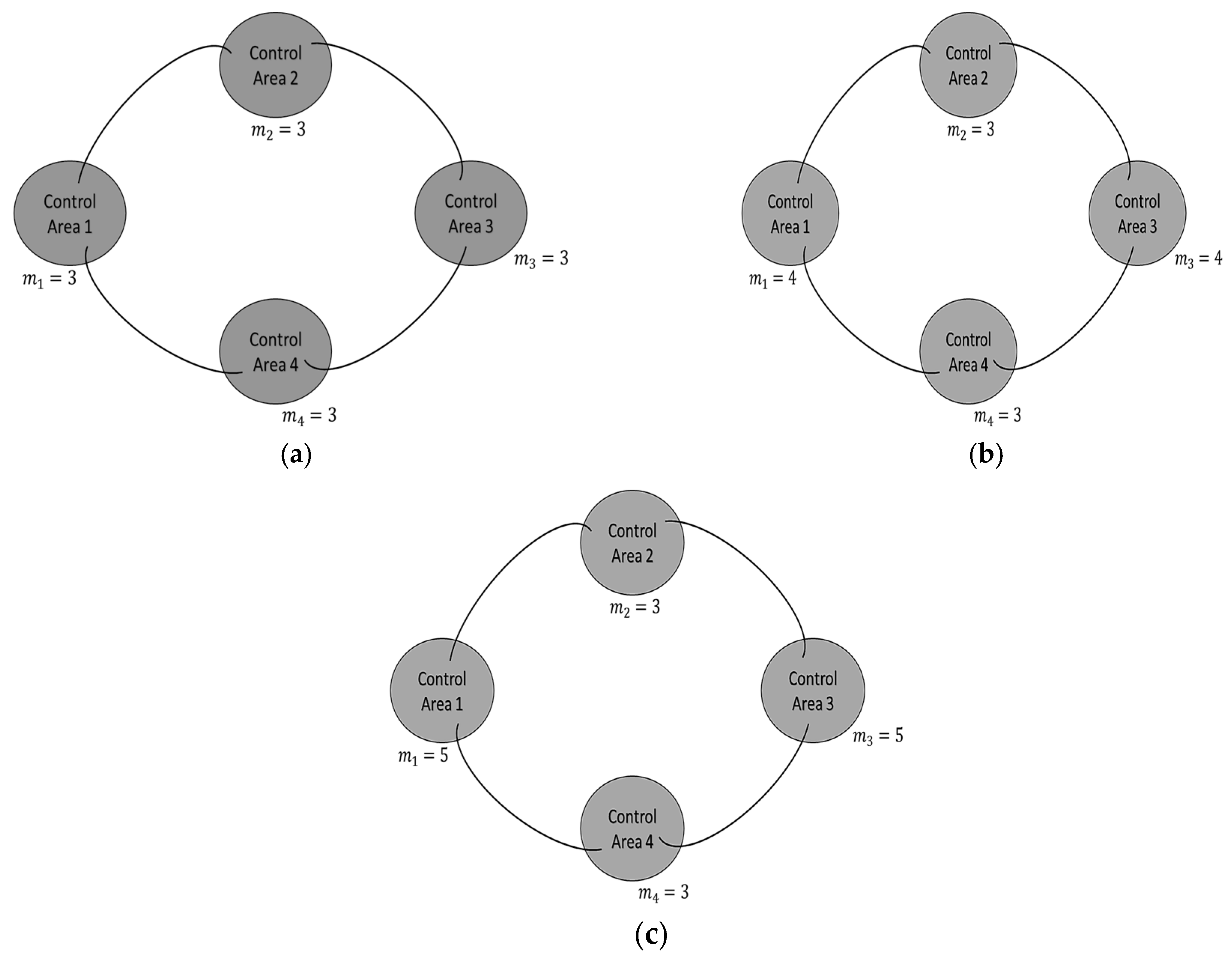
11]. A typical power systems with multiple areas is considered in this paper (
Figure 1). As shown in
Figure 1, each control area has its own load power change
Unpredicted fluctuations of load power
is treated as a disturbance for the system. Under this circumstance, both primary and secondary controls attempt to remove the frequency deviation in each area. The droop coefficient
represents the proportional gain used in the primary control. Furthermore, the objective is to design a secondary control (LFC) to improve the result of the primary control.
From
Figure 1, the system is comprised of the generators, as an electrical power generation, and a load. The number of the generators in the
th area is denoted as
The generator model consists of two major generation units: a governor and a turbine. Both are represented in a first order linearized model. The dynamics of the governor can be expressed as:
and the dynamics of non-reheating turbine unit can be expressed as:
where
and
are the time constants of the governor and the turbine model in the
th generator.
The basis for attaining the regulation function is the tie line bias control concept that is introduced over 50 years ago [
18] and widely used to model the power flow between two or more buses [
2,
3,
4,
5,
6,
9,
10,
11,
19,
20]. Tie line power deviation
is defined as the deviation power exported to the
th area and is equal to the sum of all outflowing line power changes in the line that connects to the
th area with its neighboring areas:
Tie line power change in the
th area corresponding to the
th area,
is defined as:
where
is synchronizing torque coefficient and
and
are frequency deviation of the
th area and the
th area. For the purpose of taking the measurement delay from the
th area to the
th area into account, delay
is applied. See
in
Figure 1.
In this LFC model, strongly connected and synchronized generators are in one area power system. Assuming that all generators have coherent response of load changing, yields an equivalent equation as follows:
where the effects of system loads are lumped into a single damping constant
with the summation of inertia constants of all generating units denoted as
. Area control error (ACE) is used to obtain power deviation reference.
represents the surplus or deficiency of the
th area generation and is the summation of tie line power deviation
and frequency deviation
multiplied by bias factor
:
Along with the primary control, the secondary control converts ACE to a command and drives the speed changer of the governing system. Then the speed governing characteristic is shifted to a new set point and results in the matching load demand. Each corresponding generator produces energy based on its constant share control effort αk.
Let generating energy
as control input
. For
connected generators in the
th area, frequency deviation
can be represented in a function of
, load change
, and the summation of all frequency deviation from other areas
. The function can be written in frequency domain as follows:
where
is the constant share effort for the
th generator,
and
are defined as
Hence, the general function of frequency deviation
is written as follows:
where:
In this LFC problem, the ACE is considered as the system output
. With
defined in (10), the output
can be expressed as:
where
is the Laplace transform of
. In (12),
and
can be treated as one external disturbance
. In other words, the
th area considers neighboring frequency deviation and power load change as its external disturbance. In view of (12), the input-output relation of the system in the
th area can be written as:
where
is defined as:
Multiplying right and left side in (13) with
yields:
where
is a proper transfer function. For the purpose of the controller design, it is desirable to obtain a simplest possible model. To this end, the previous equation can be written as:
where
denotes a lumped disturbance and
is a parameter. Hence, in the time domain, the model can be expressed as:
where
is the inverse Laplace transform of
. The corresponding state space model is given by:
where
Note that
is determined by other parameters, for example,
,
, and
and so on. In general, inertia parameter
and damping constant
are uncertain. Hence,
is uncertain as well but its upper and lower bounds can be known since those of
and
can be known. This paper pays particular attention to the uncertainties in
and
. Consequently, the resulting model (18) is a third order uncertain model with unknown bounded external disturbances. As a matter of fact, it is not easy to design an observer due to the uncertain parameter
since it is not clear which value is used for
in the observer model. Note that
representing ACE is the only measurable signal in general.
With the uncertain model in mind, the LFC problem is to design using the measurement such that converges to zero despite uncertain and external disturbance . Note that convergence of to zero implies that the frequency is regulated to its nominal value.
The nominal model of the uncertain model can be assumed as:
where
is the controller for the nominal model and
denotes the nominal parameter of
.
For this nominal model, there are many standard control design methods to regulate the state. For example, pole placement and linear quadratic regulator (LQR) are the representatives of such methods. However, difficulty here is that the original model is uncertain and, in general, the state is not measurable. Hence, the objective of the LFC is to design a robust output feedback stabilizing control for (18). For control design, it is assumed that the lumped disturbance is unknown and bounded. In the next section, a HDOB based robust output feedback control design is presented.
3. Review of HDOB Based Controller
This section briefly reviews the basic concept of the HDOB in [
17]. The dynamic system in
Figure 1 shows that each control area has different physical parameters and coefficients for the droop control. This makes the problem even more challenging, that the controller should be able to handle the presence of disturbances as well as the parameter uncertainties. Regarding this issues, a HDOB based controller is employed as it is known to be robust against large parameter uncertainties and external disturbances.
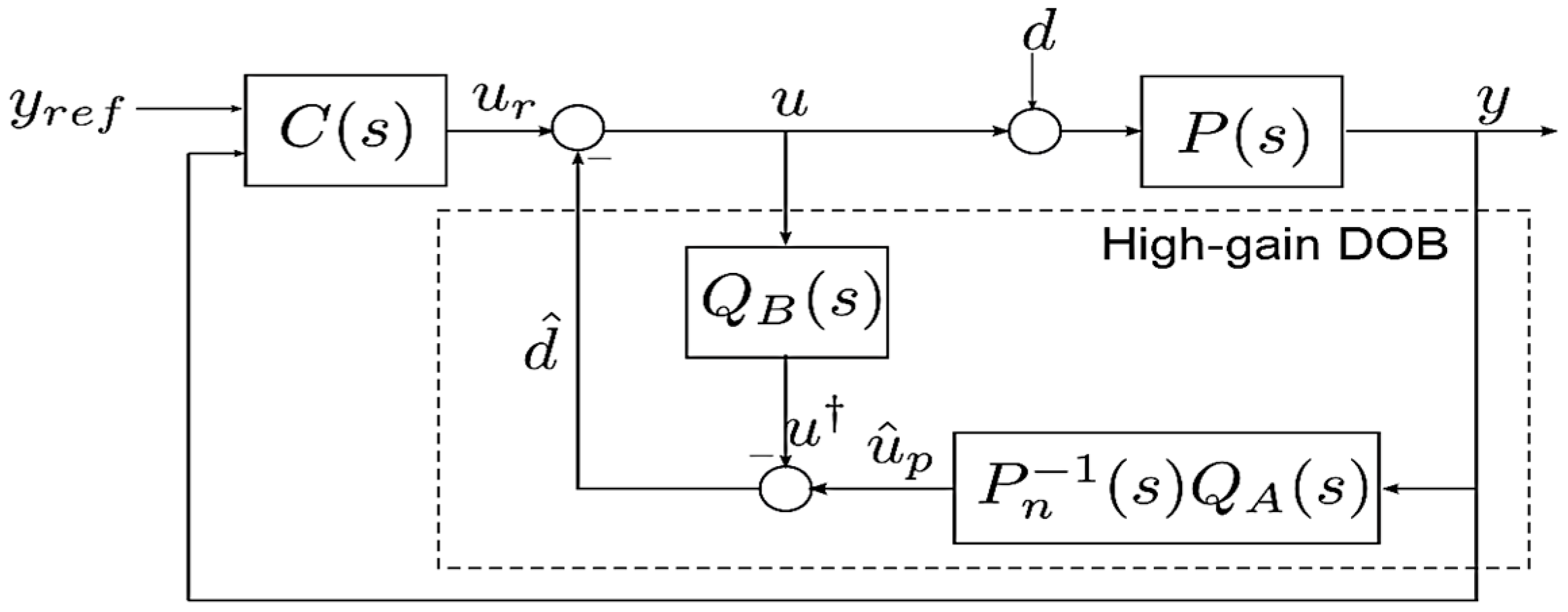
The structure of HDOB based controller is described by
Figure 2 where
is the plant output, and
u is the control signal [
17].
and
are stable low pass filters,
is the controller for the nominal model,
uncertain dynamic system and
is the nominal model given by:
where
and
denote the uncertain parameters of
,
the state of the plant
,
and
are known nominal parameters of
,
the state of the nominal
.
Suppose that
is the same as
. By multiplying plant output
y with the inverse of nominal model
, we could obtain
which is roughly the same as the actual input to the uncertain system, i.e.,
. The estimated disturbance
is obtained by subtracting
with filtered control input
Low pass filter
and
are formulated as:
Thus, filtered nominal model
can be written in state space as:
where:
with
and
design parameters, and
is the state vector of
. With the parameters given earlier,
can be expressed as:
where
. While the filtered control signal
u is defined as
that can be written in a state space as:
where
is the state vector of
with
. Consequently, the HDOB estimates the disturbance
with:
As shown in
Figure 2, the closed-loop system consists of the uncertain system
, the nominal controller
, and (22)–(27). The proposed HDOB based robust control is given by:
Assumption 1. All the uncertain parameters in and the unknown external disturbance in (20) are bounded.
Assumption 2. The stabilizing control for nominal model is given.
Theorem 1. [17] Suppose that Assumptions 1 and 2 are satisfied. Then, there exists for a given such that the HDOB based control (19) with any results in: The idea behind the HDOB based control is that the HDOB makes the input-output relation of the combined system of
and HDOB almost the same as that of
by canceling the estimated disturbance. Hence, the nominal control
can stabilize the whole system. Another important feature of the employed HDOB is that the state the
, i.e.,
, is, in fact, the state estimate of the uncertain plant
[
17,
21]. This feature is importantly used in the proposed LFC design.
4. HDOB Based LFC for the th Area
In this section, the proposed HDOB based LFC is presented. In accordance with the design procedure in the previous section, the nominal control is designed first. In order to design the nominal control
for the nominal model (18), any state feedback control law can be employed. For example, using pole placement or LQR, we can design
as follows:
where
are feedback gains and they are determined such that:
becomes asymptotically stable. In this paper, the state feedback gain
and
are determined using LQR method. The performance index is:
where
and
are weighting matrices. The optimal state feedback control gains are computed by minimizing
and given by:
where
, and
is the solution of the Riccati equation. Since
is not measurable, we can use its estimate
in the nominal control
. Hence, the nominal control is:
The HDOB can be designed according to the design method explained in the previous section with
. Based on these, the proposed HDOB based LFC is given by:
where
is the output of the HDOB given in (27) and function
designates the saturation function. The saturation function is employed at the output of the HDOB to avoid the peaking phenomenon which means that a very large control value due to a small
can make the state of the system very large as well. Since the HDOB designated in this paper is a high-gain observer type, employing such a saturation function is necessary [
22,
23]. The HDOB consists of two design parameters:
and
. Since the nominal model is a third order model, the parameter
are chosen such that
becomes stable. In addition,
is determined sufficiently small.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}