A Proportional Resonant Control Strategy for Efficiency Improvement in Extended Range Electric Vehicles


Abstract
:1. Introduction
2. EREV Efficiency Improvement Design
3. Development of the Control Strategy
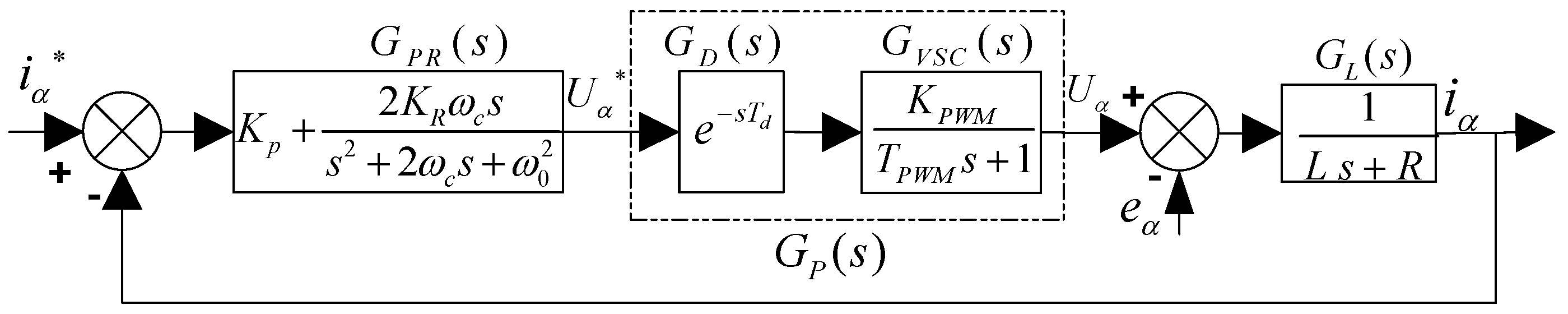
3.1. Modeling of the Generator Control
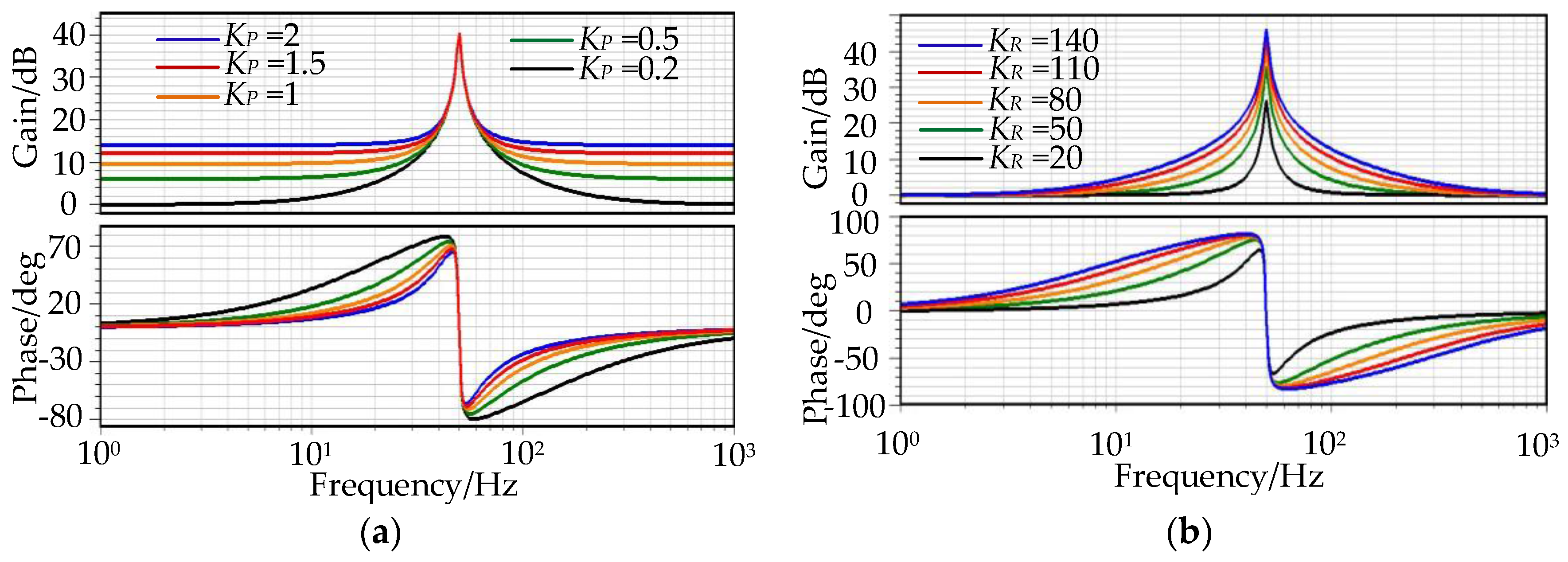
3.2. Design of PR Controller
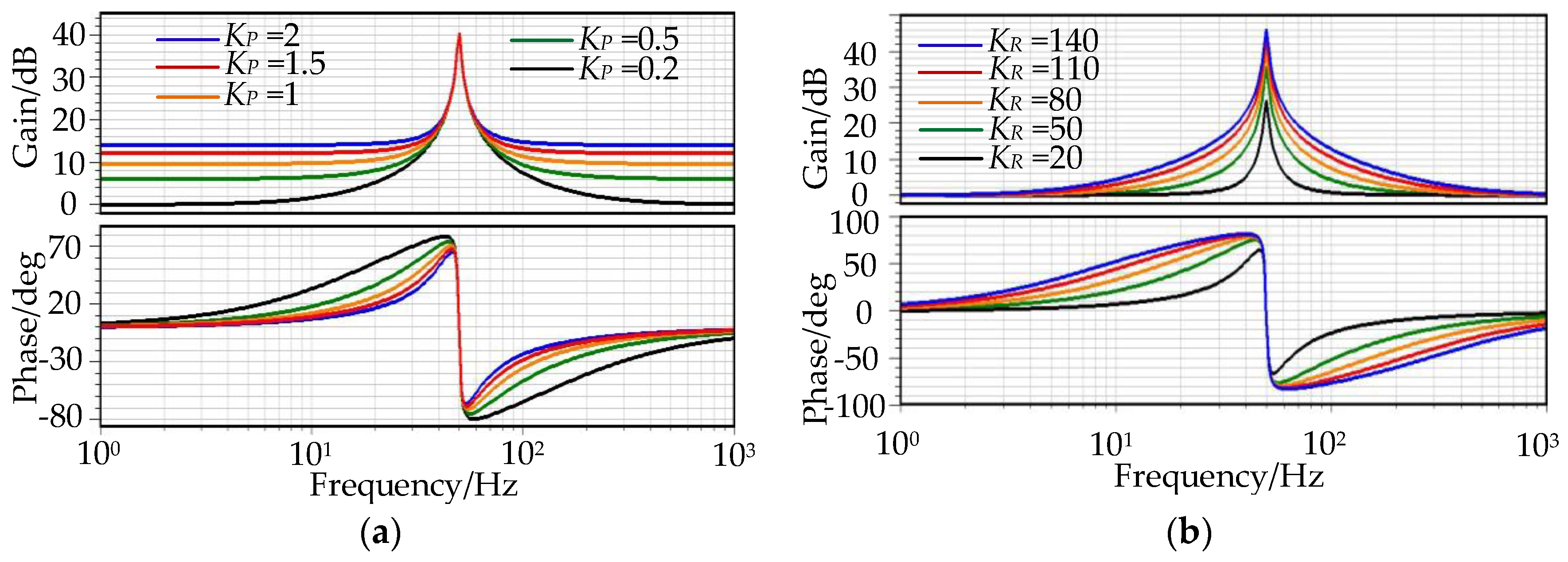
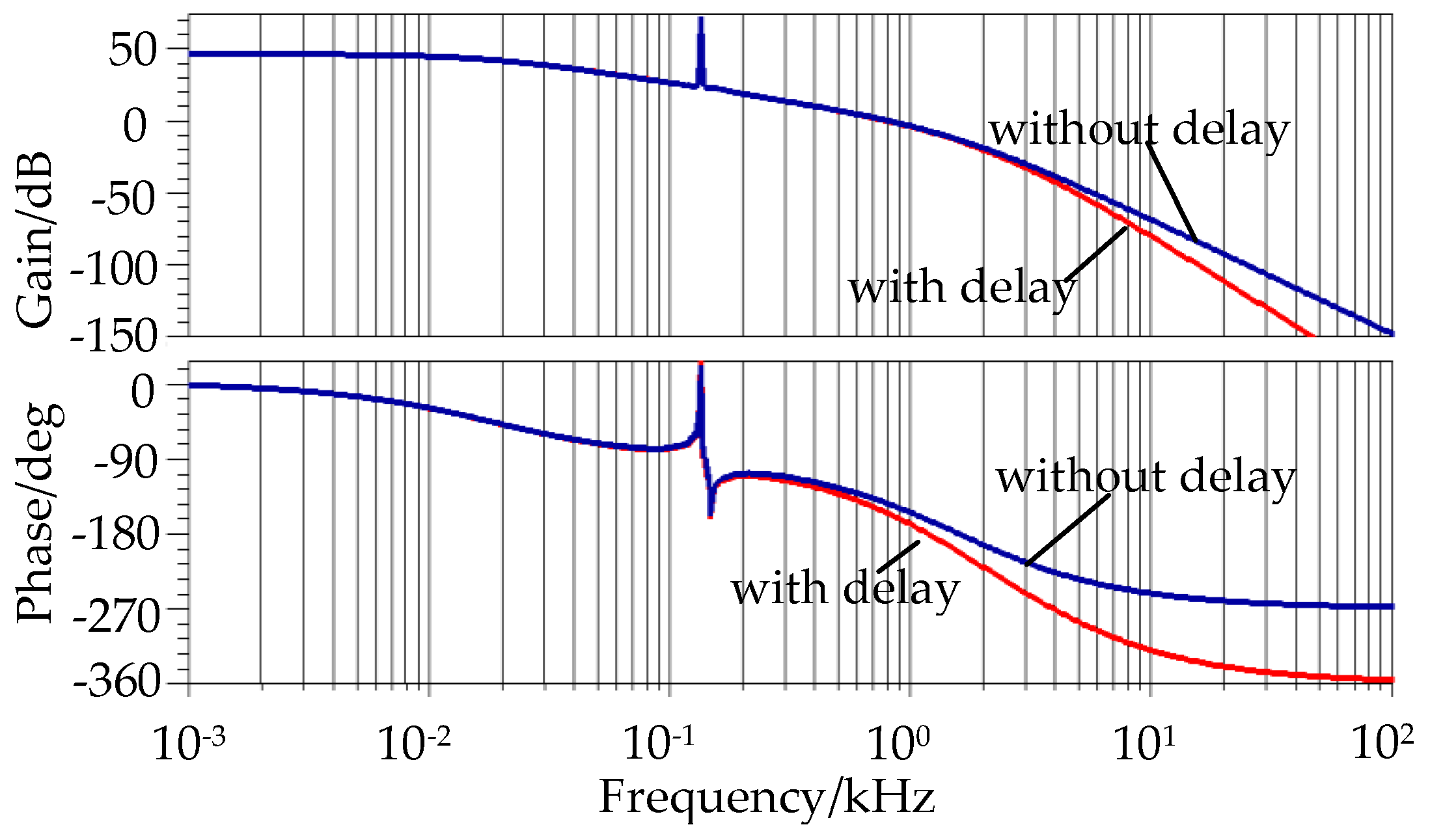
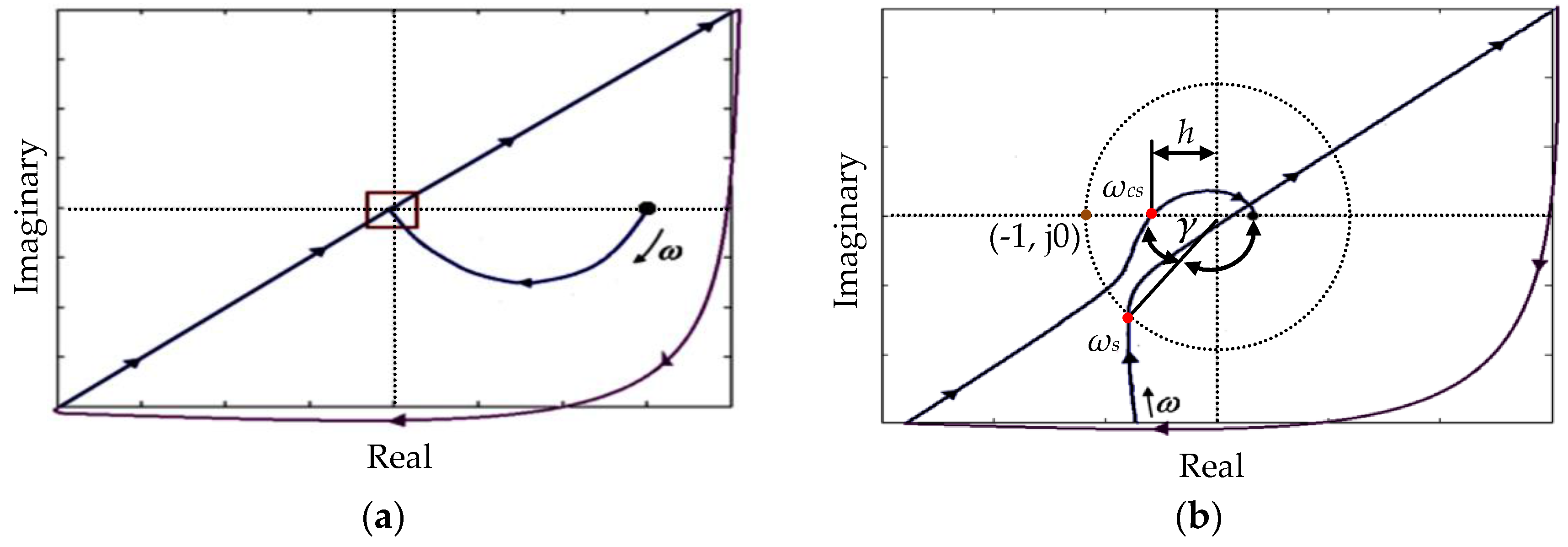
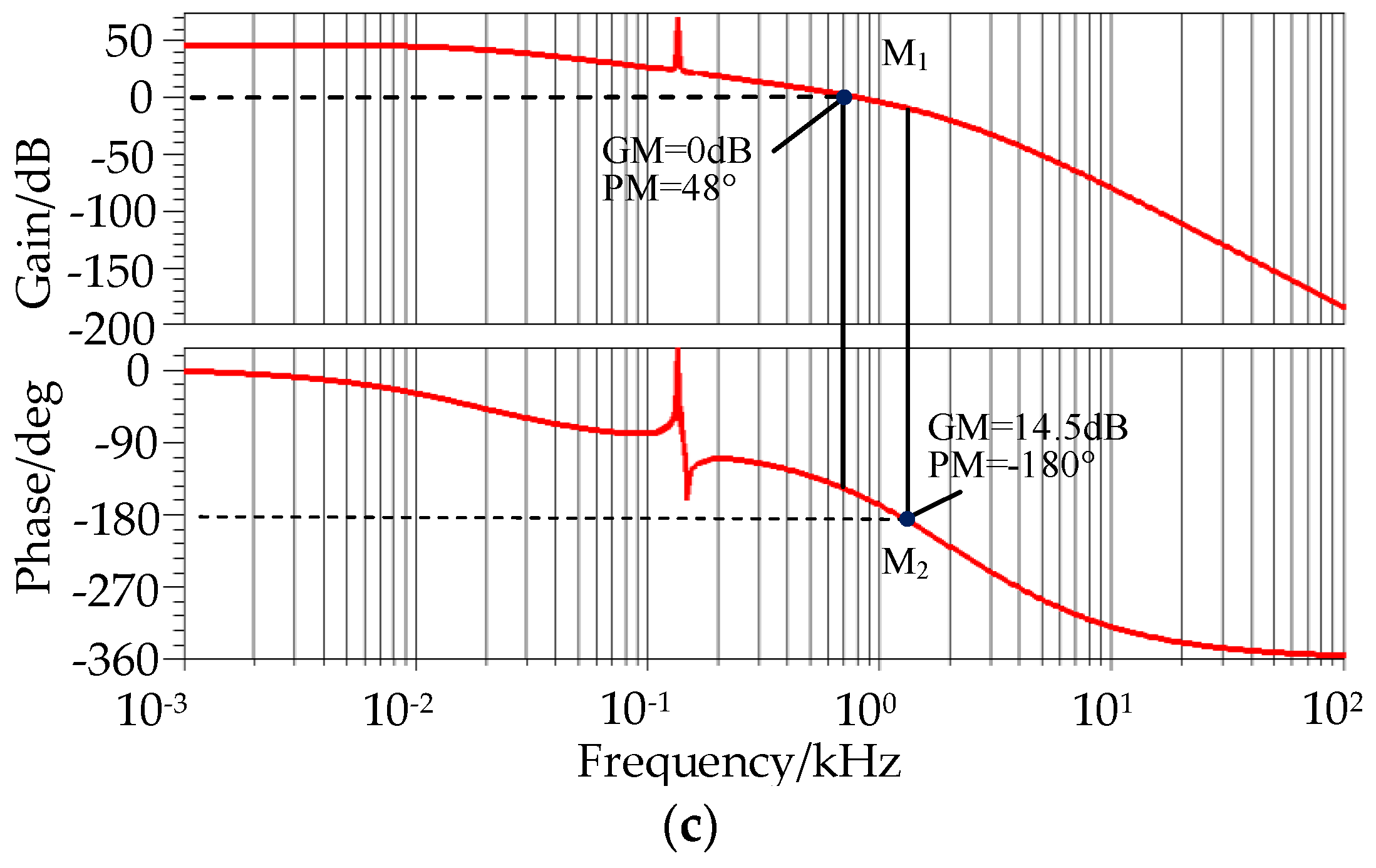
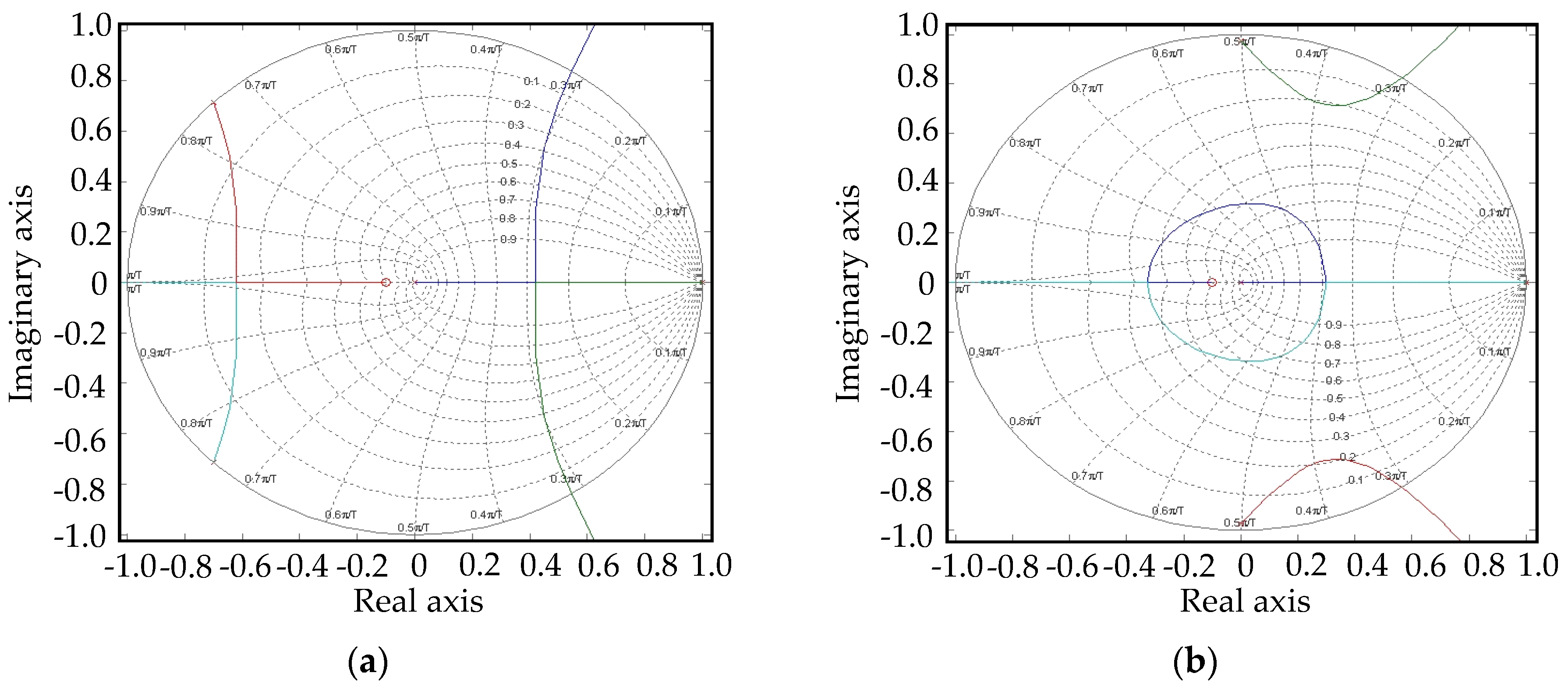
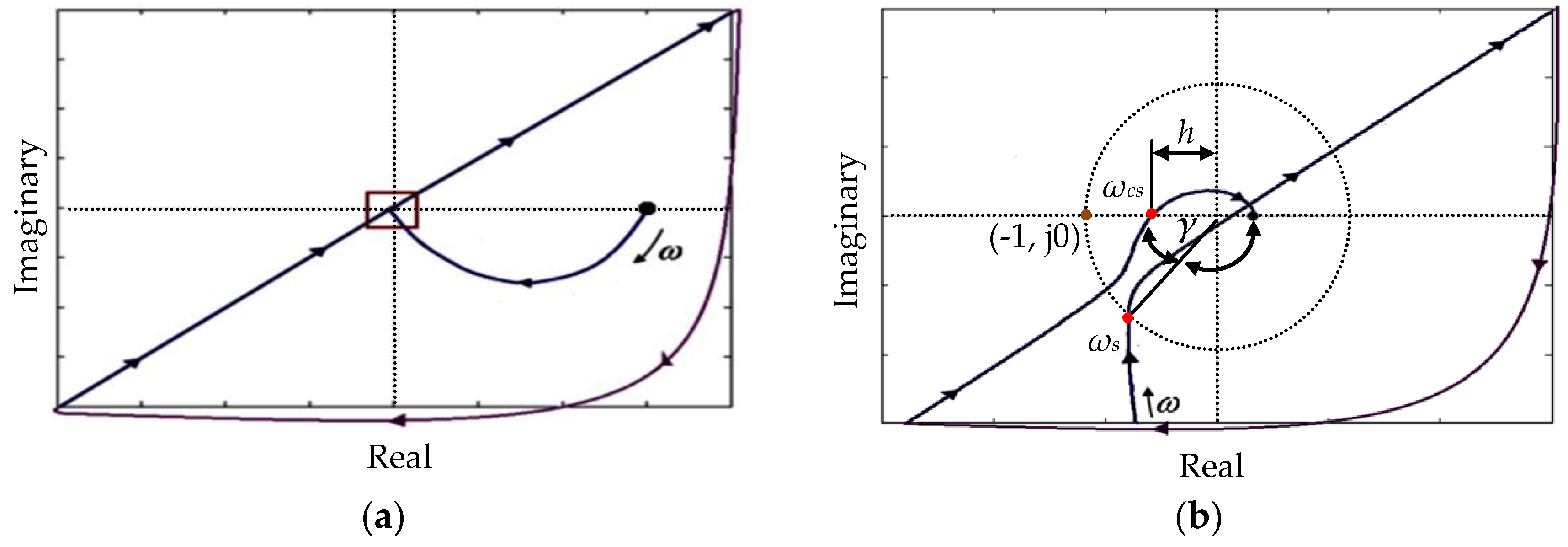
3.3. Design of Control Stability
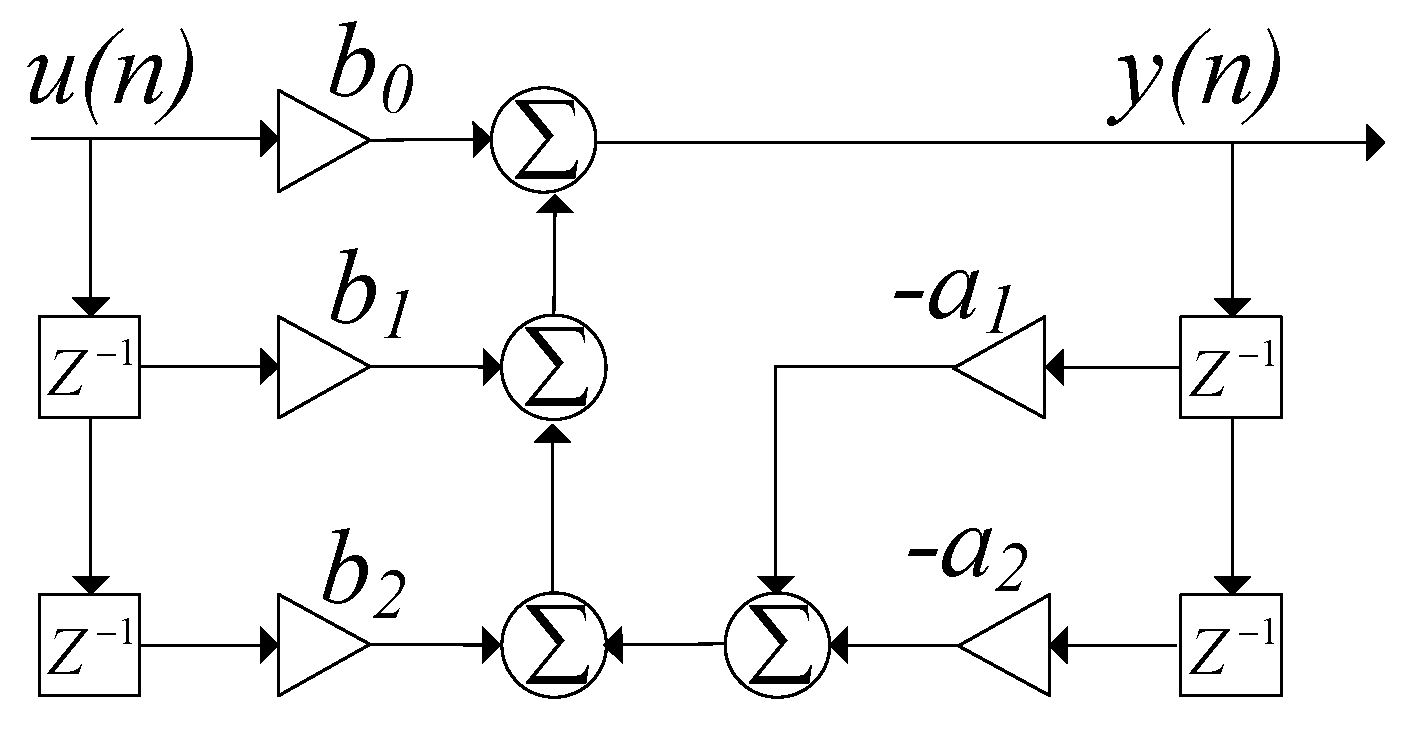
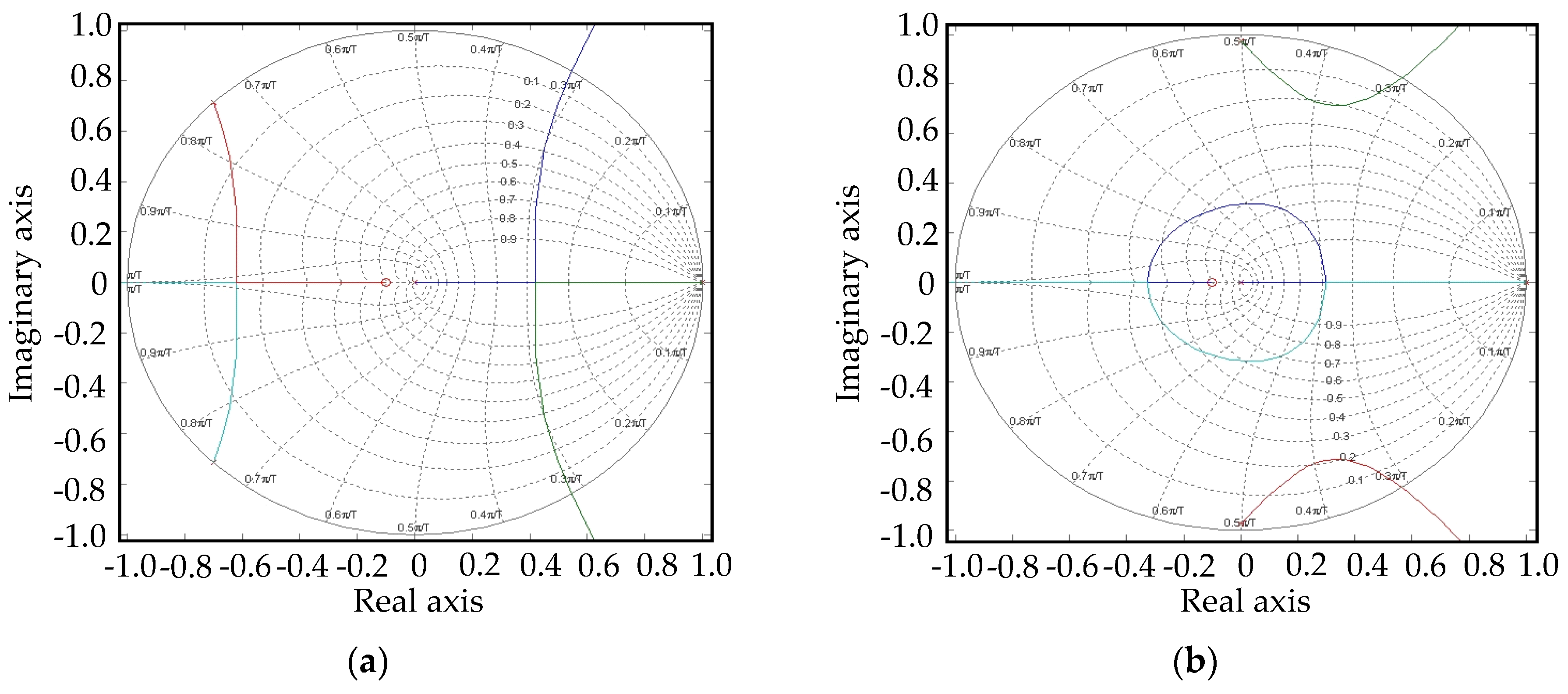
3.4. Implementation of PR Controller
4. Simulation and Experimental Results
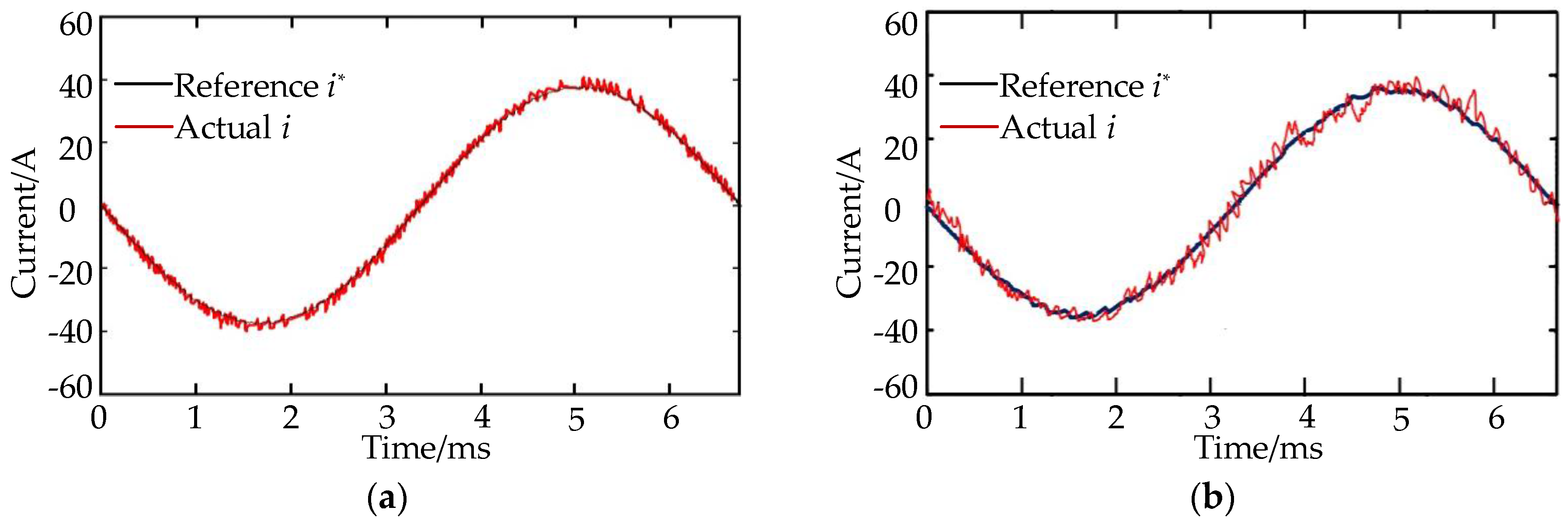
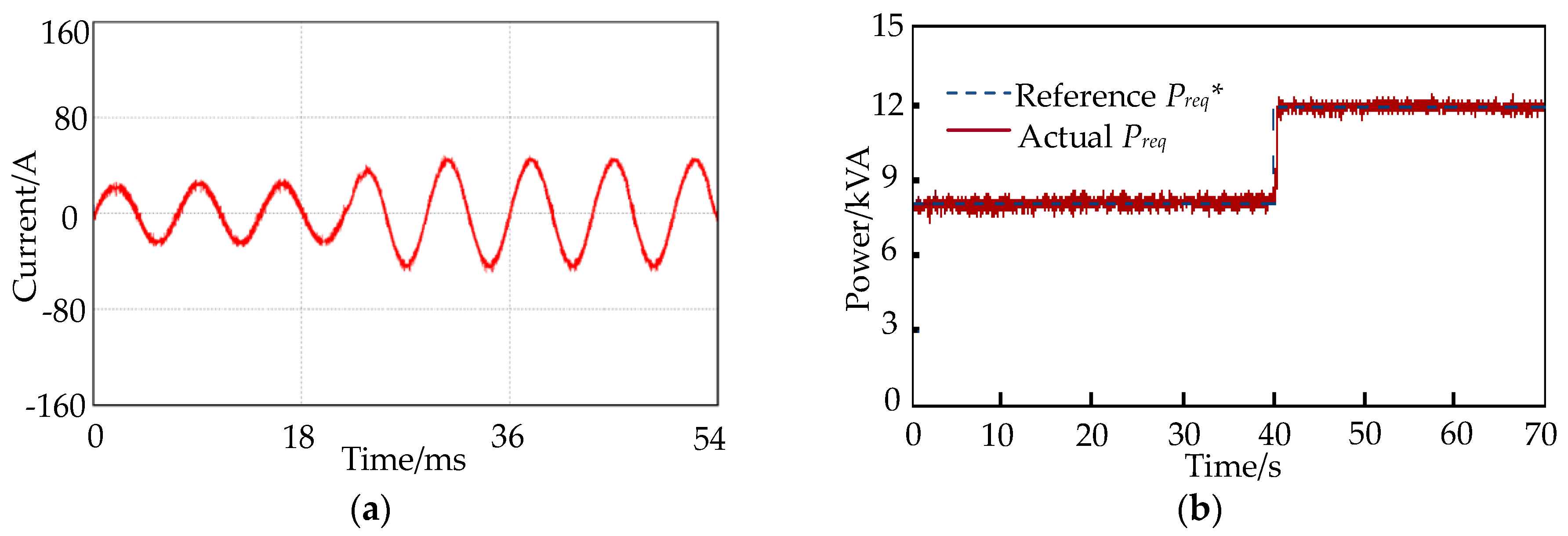
4.1. Simulation Results
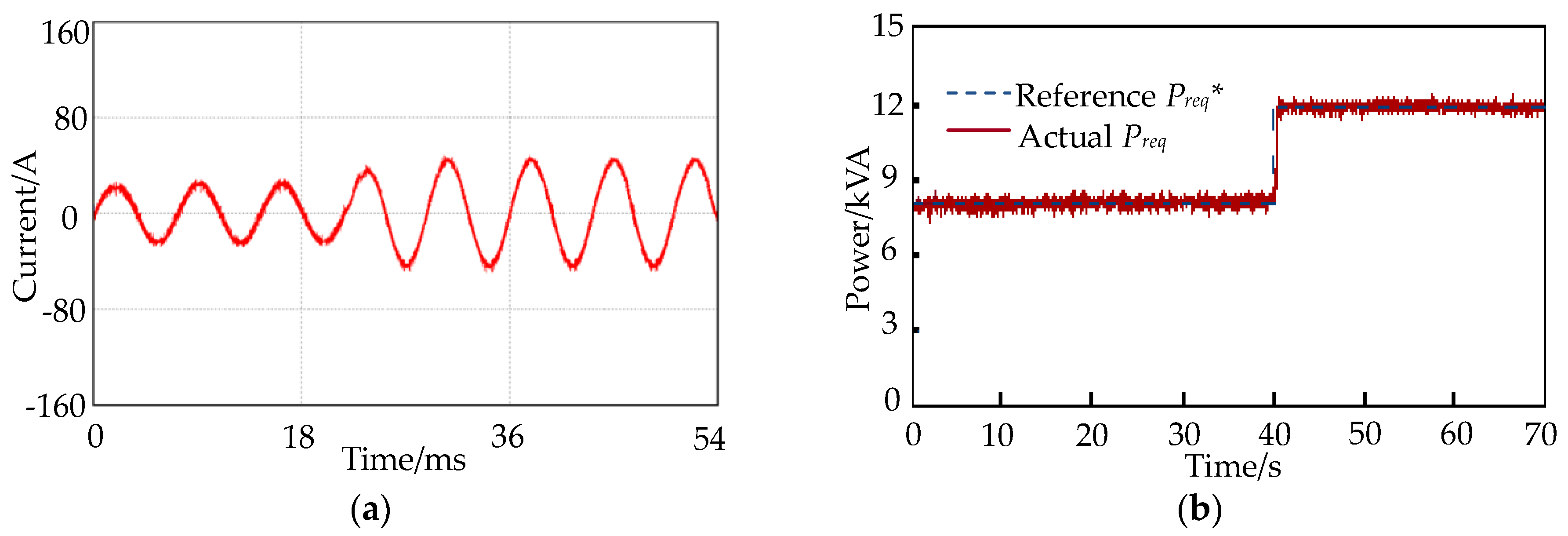
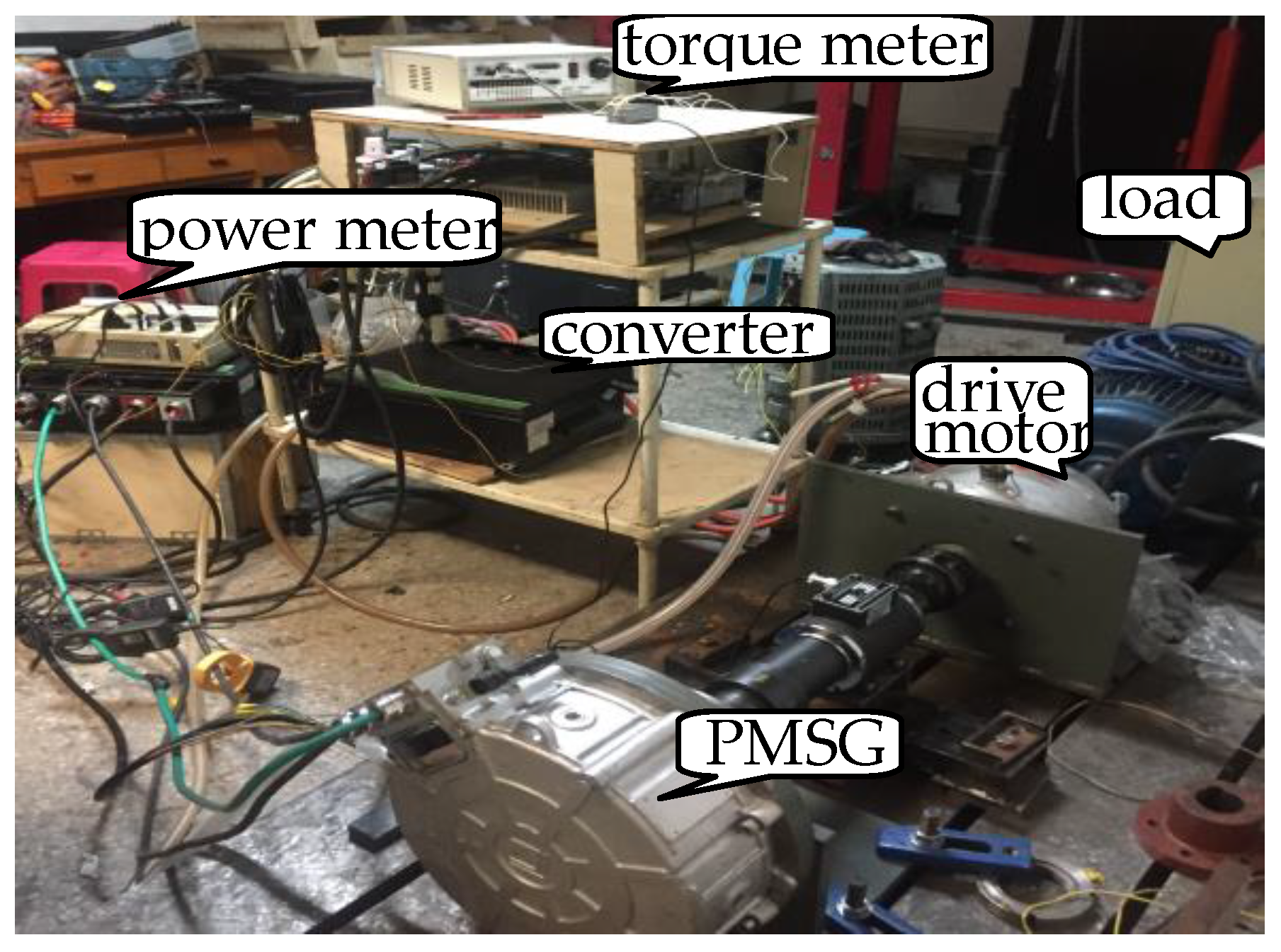
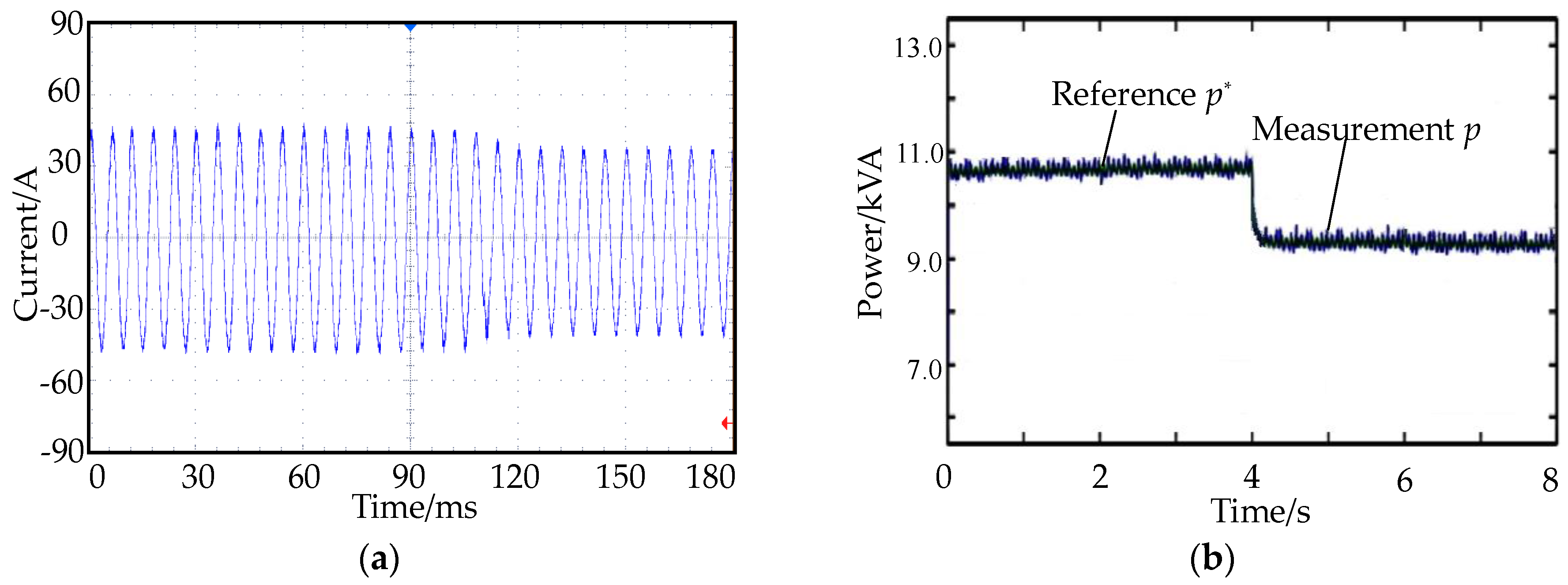
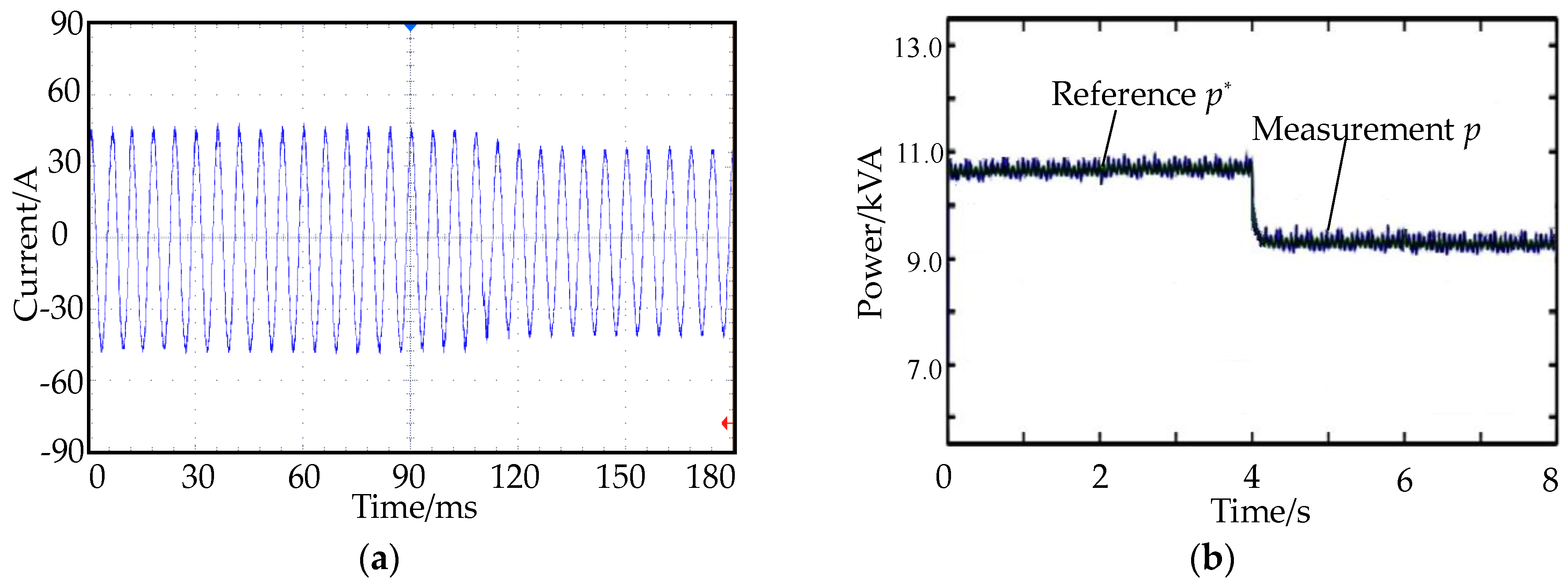
4.2. Experimental Results
5. Conclusions
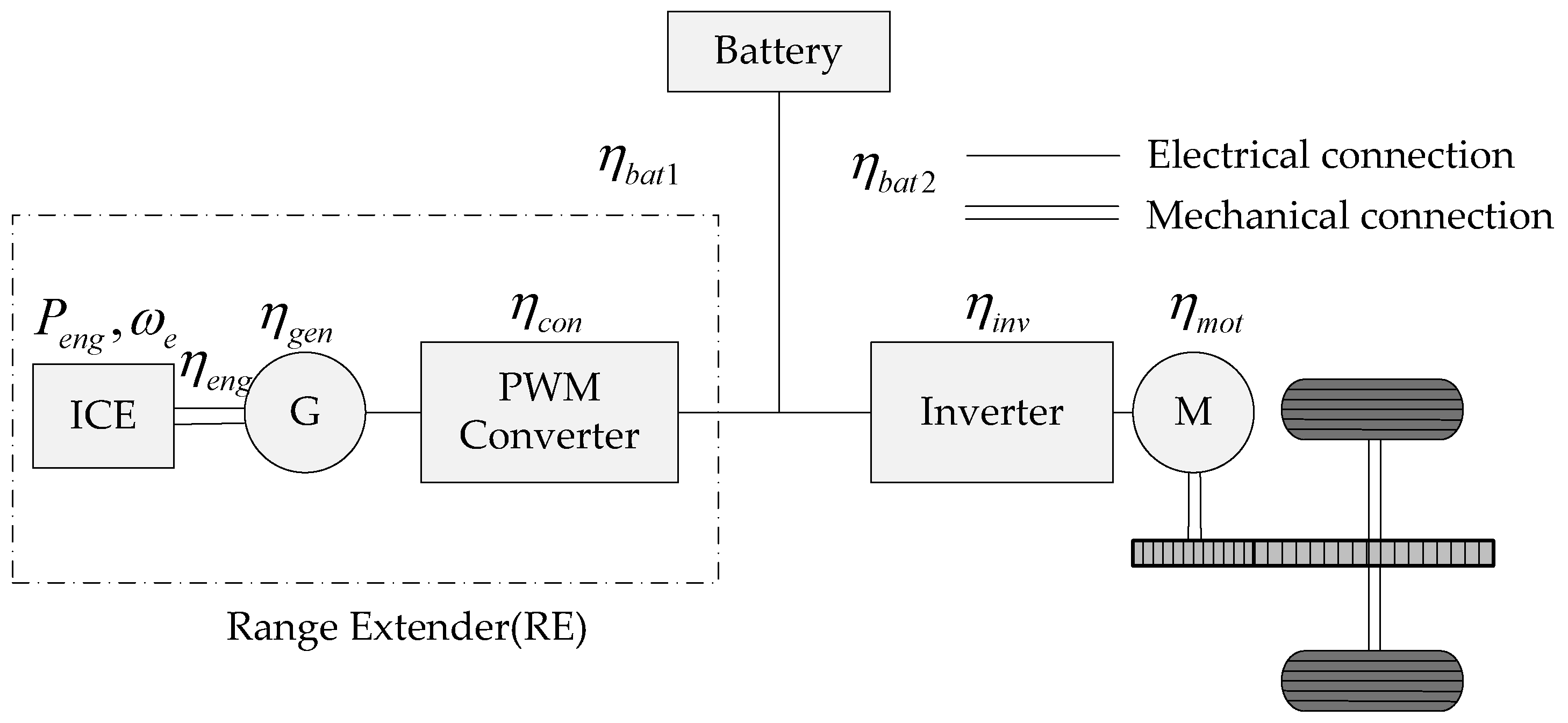
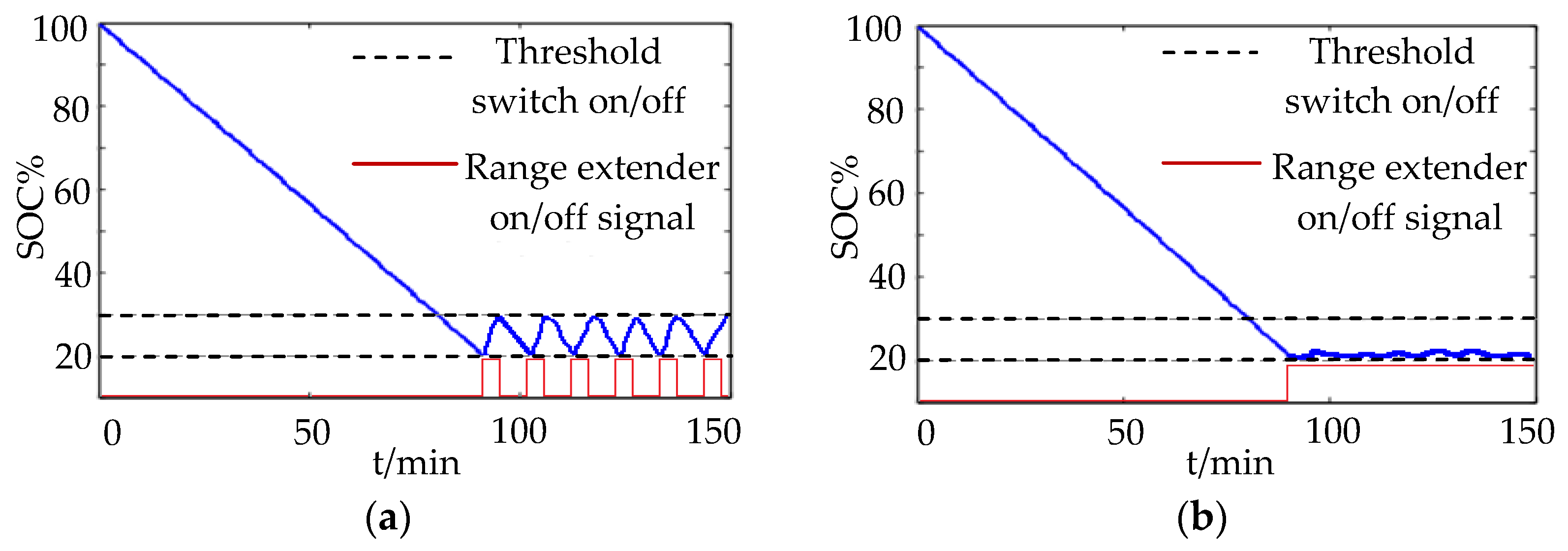
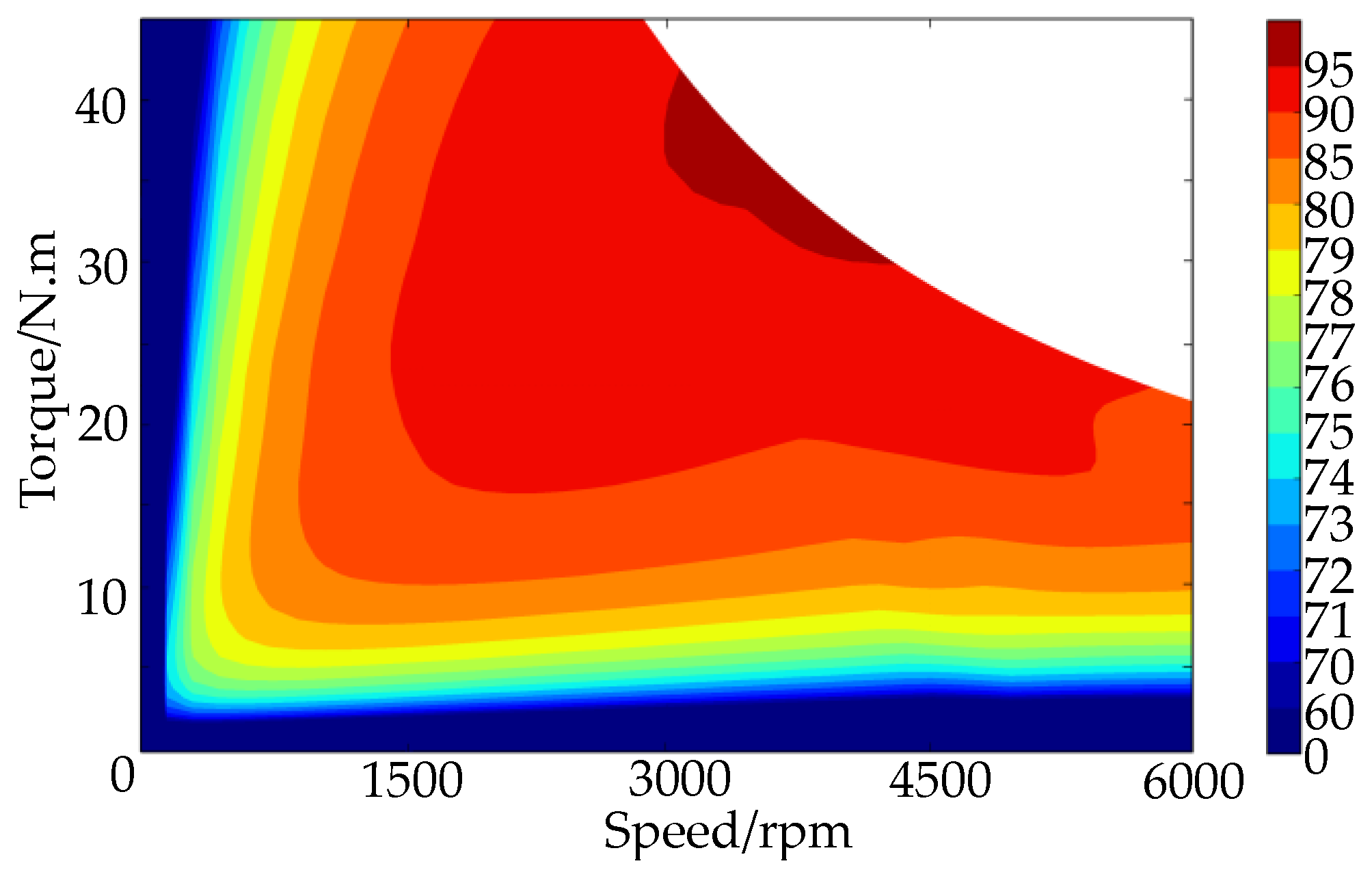
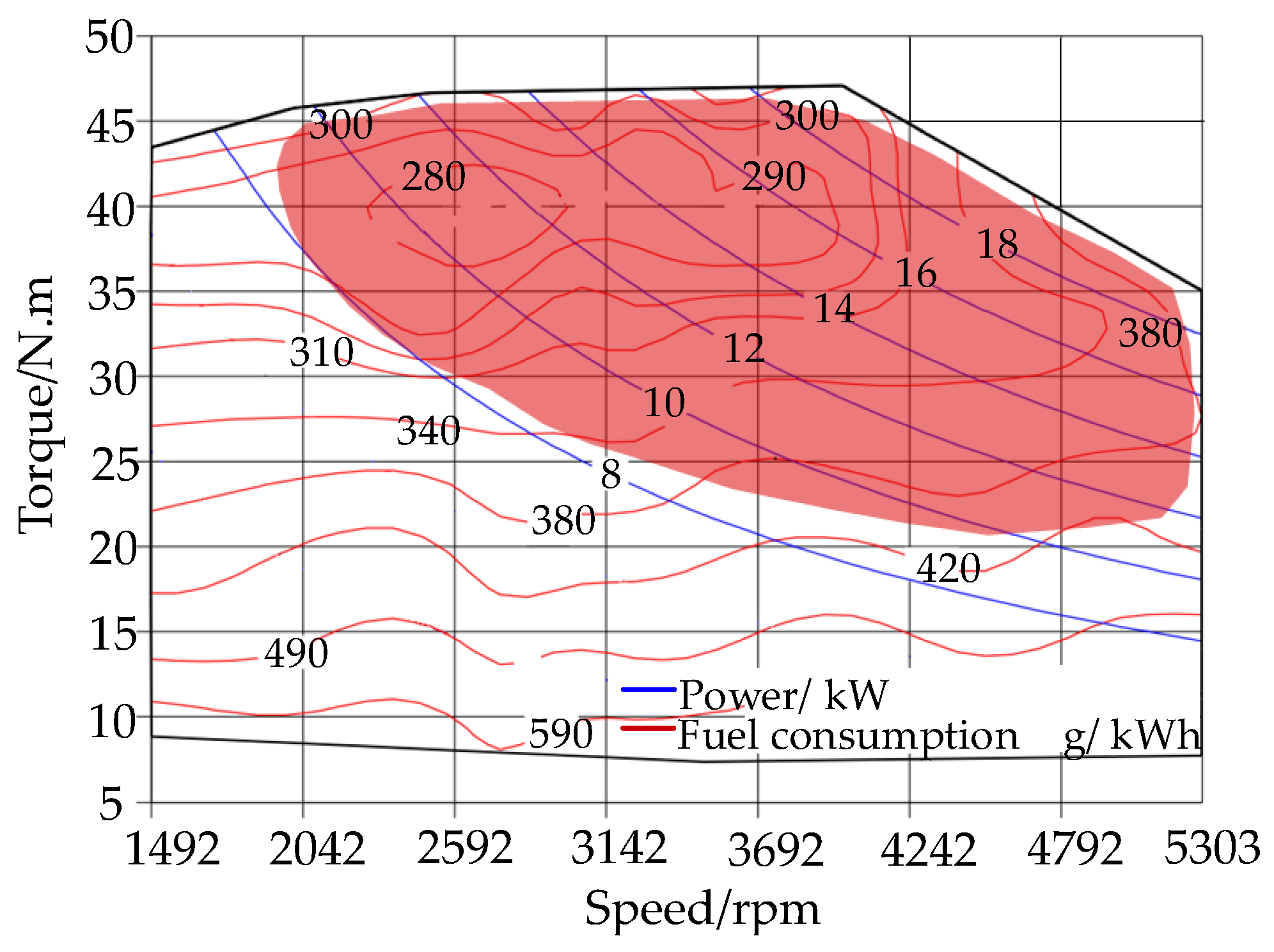
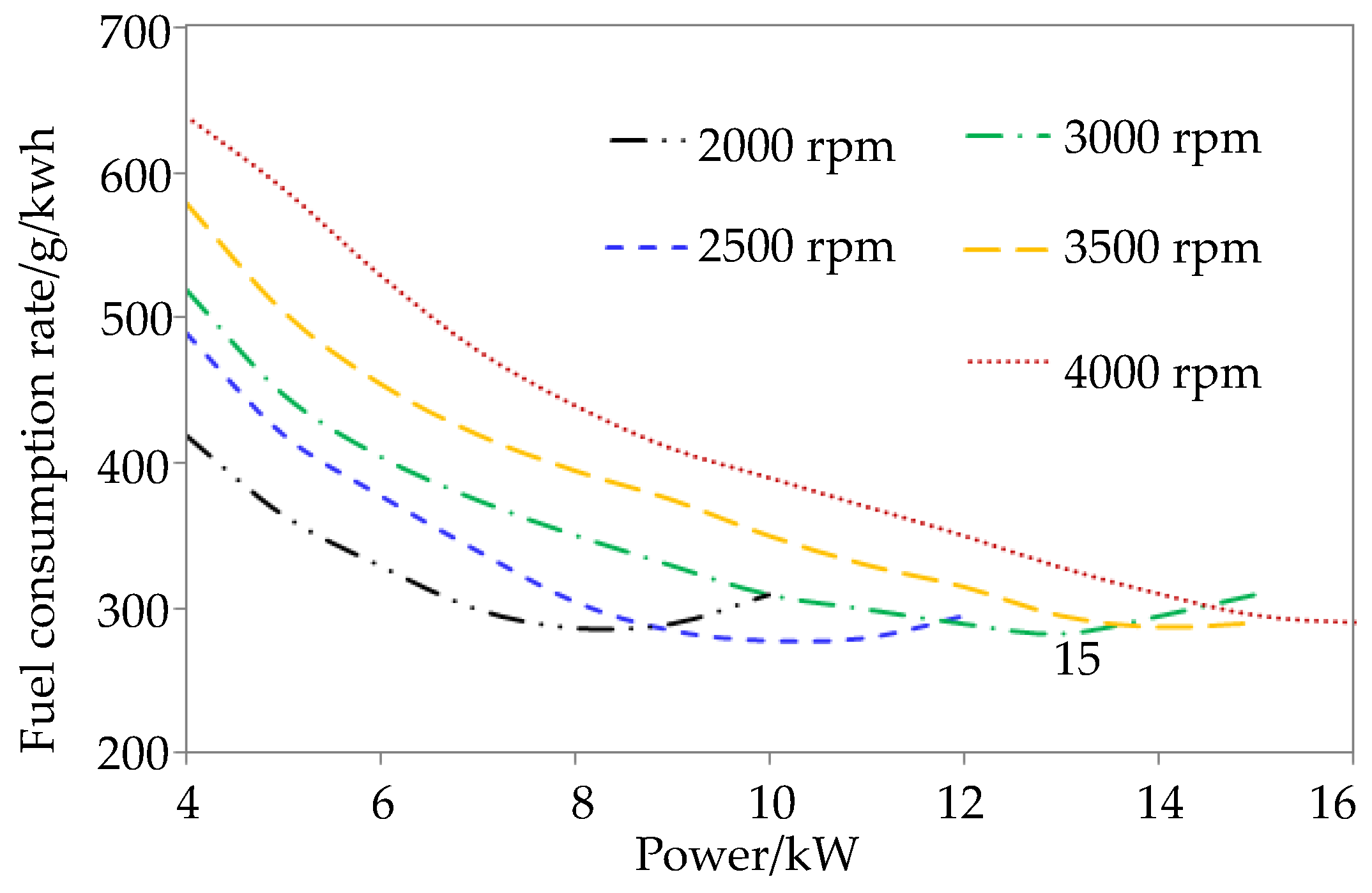
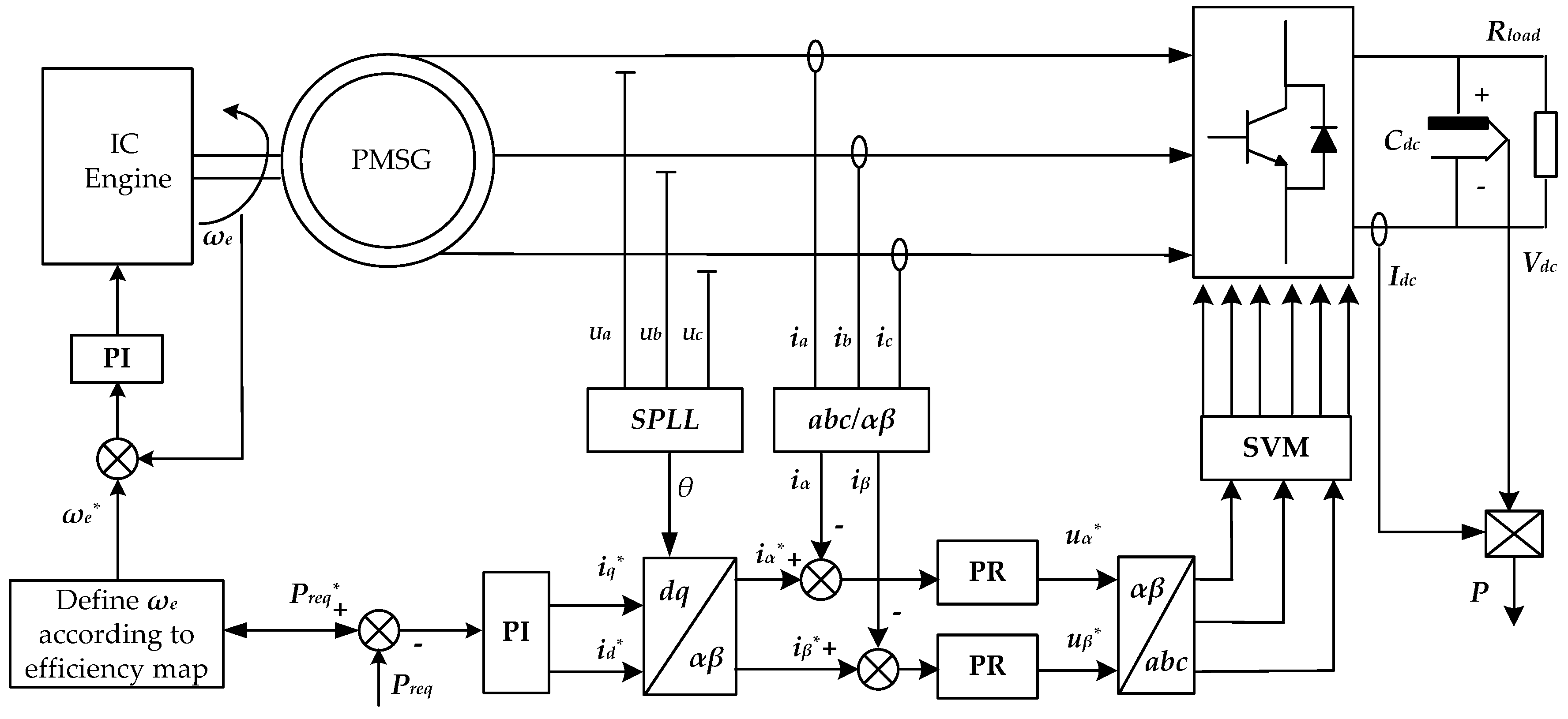
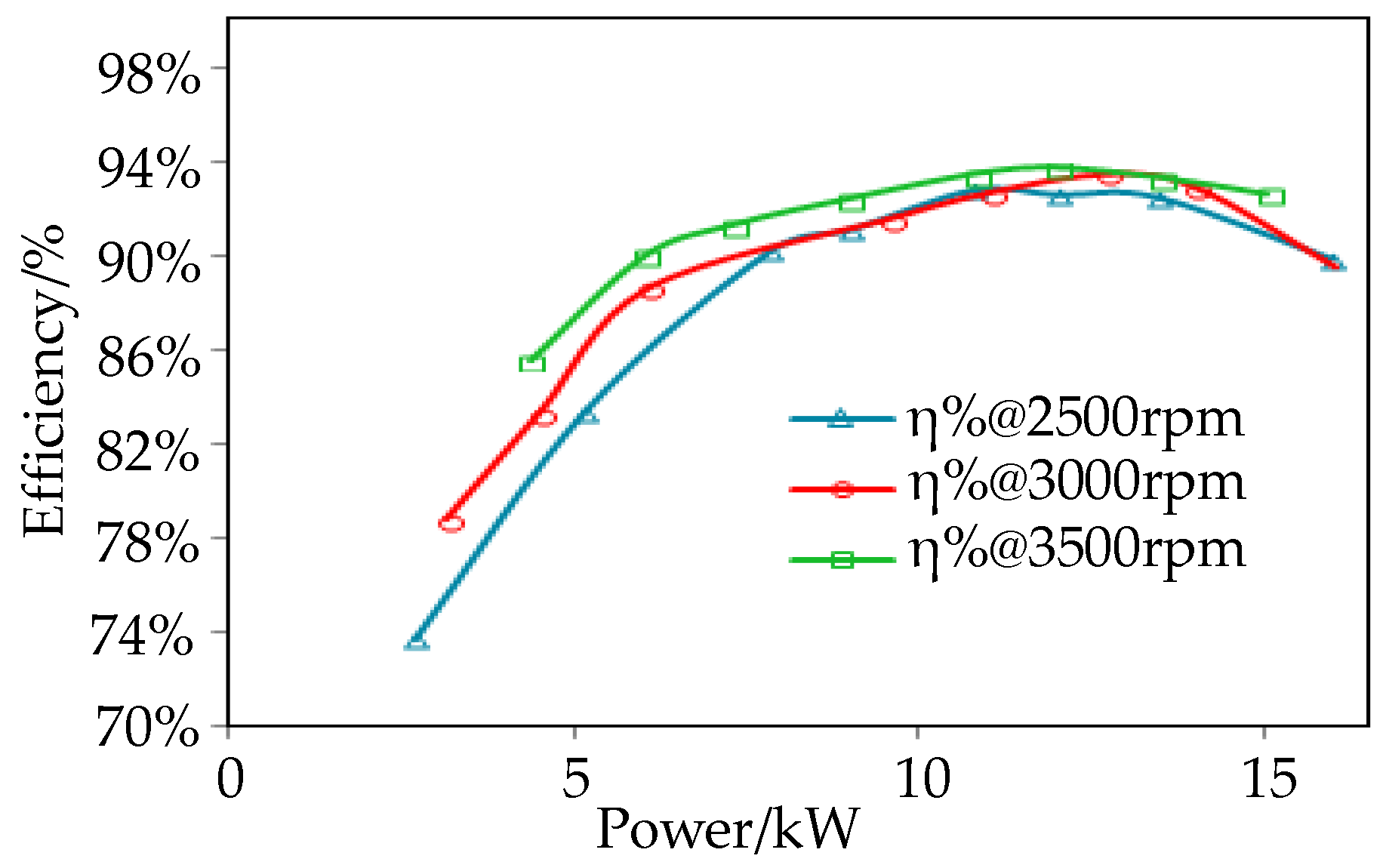
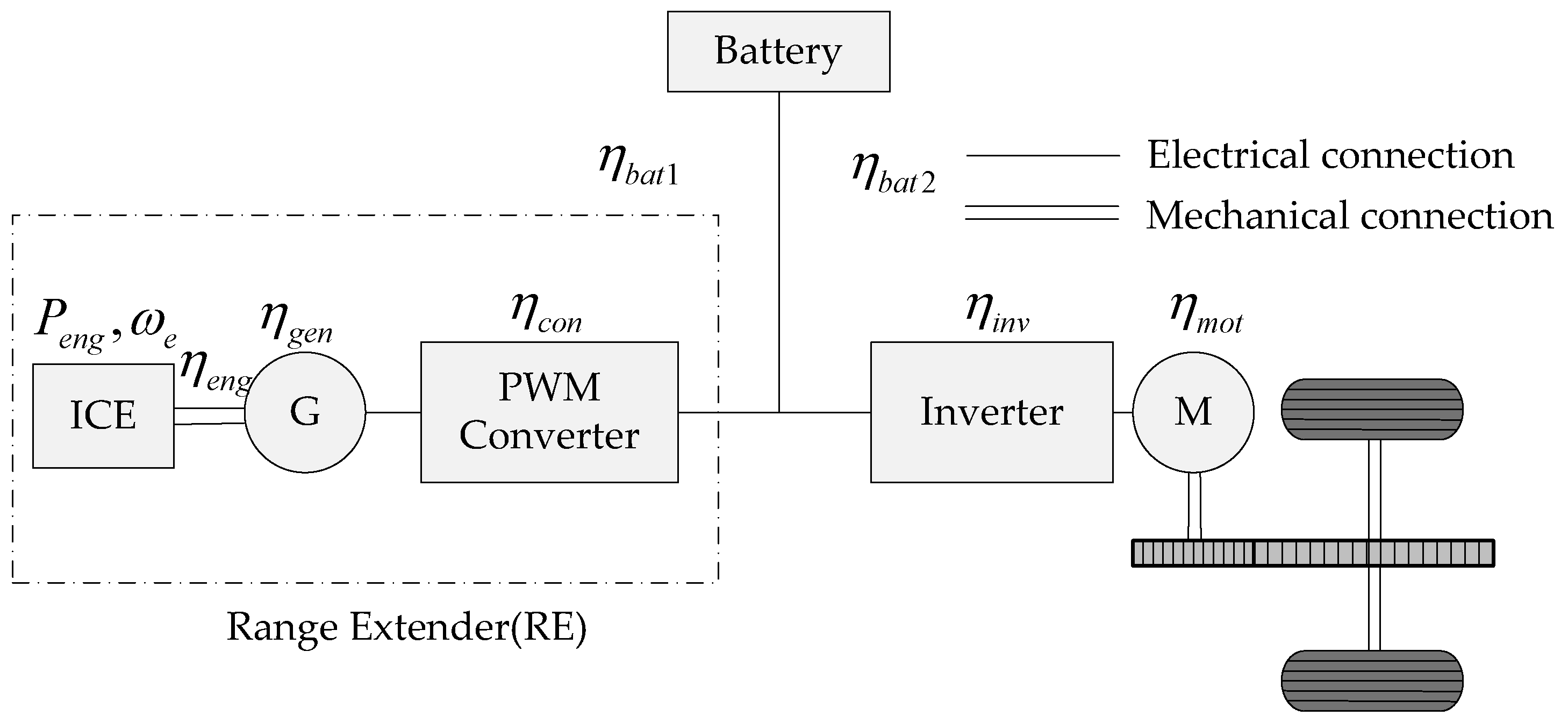
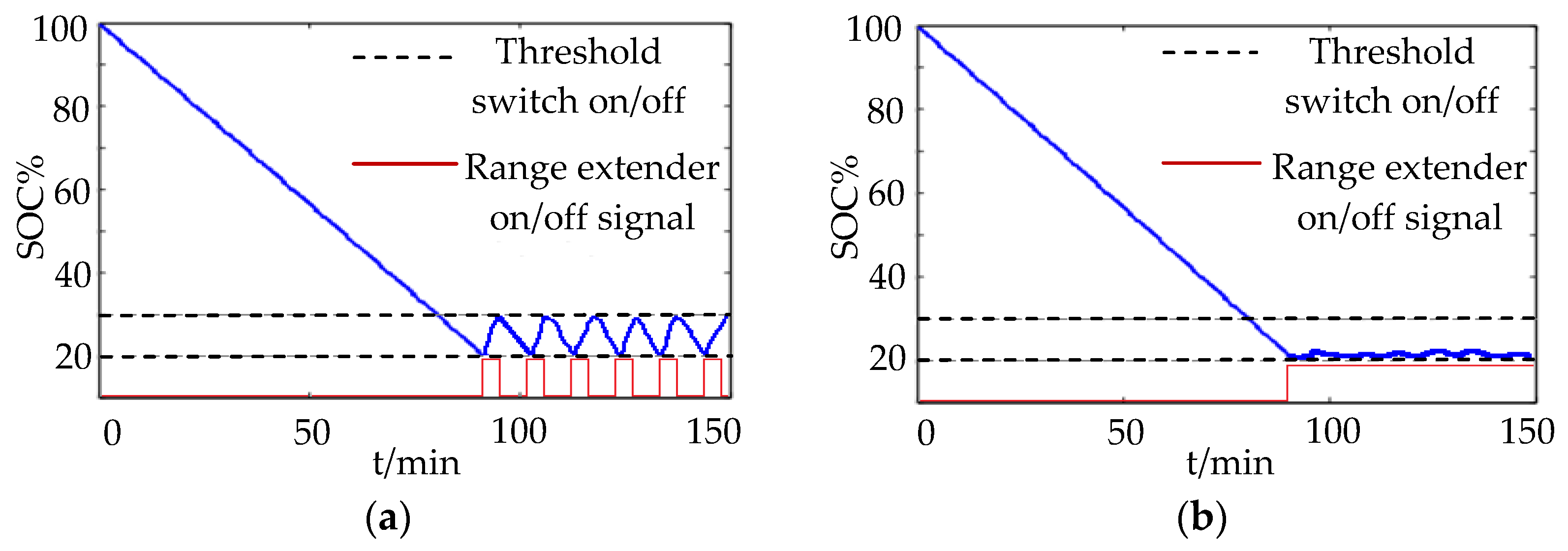
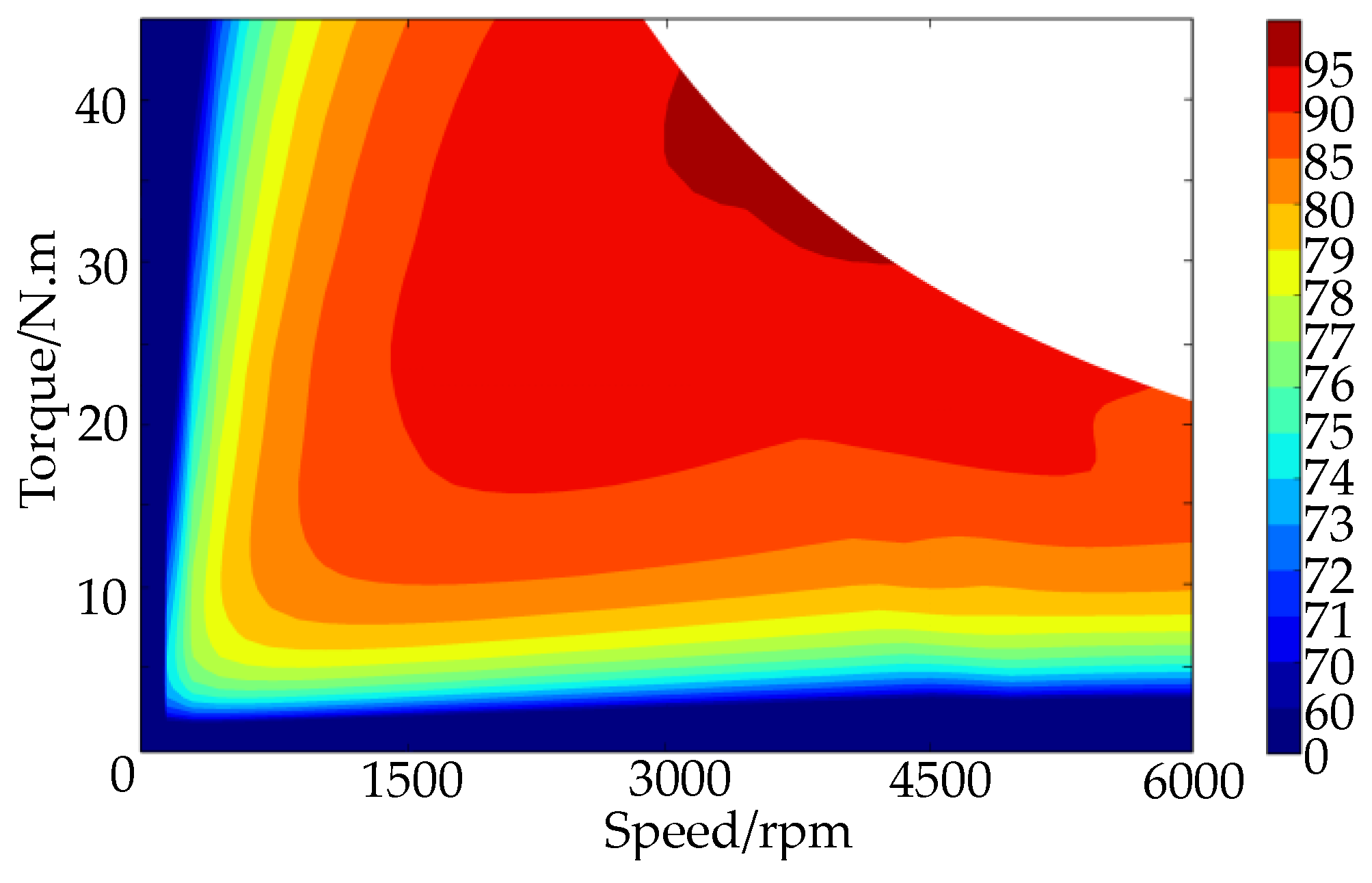
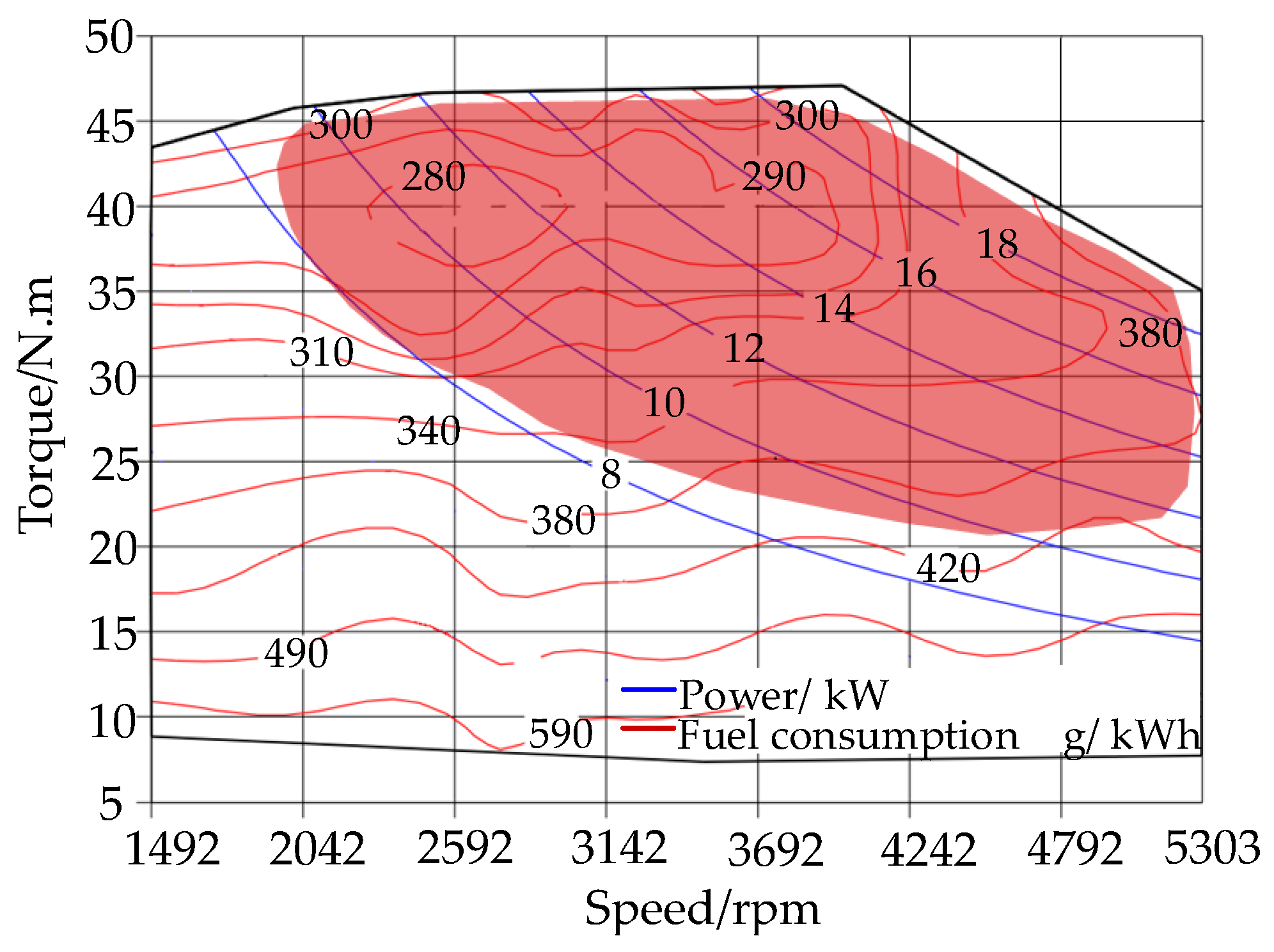
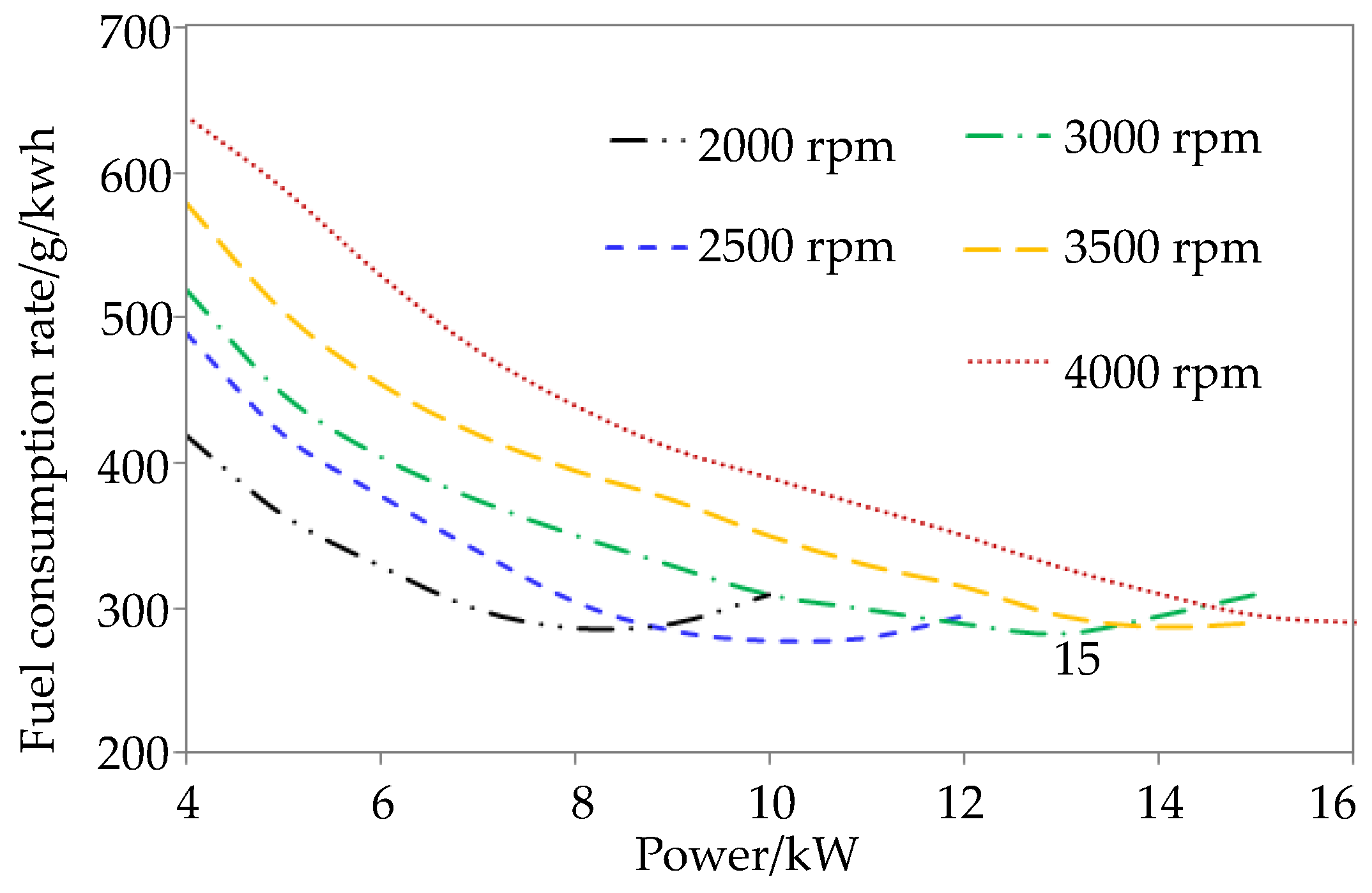
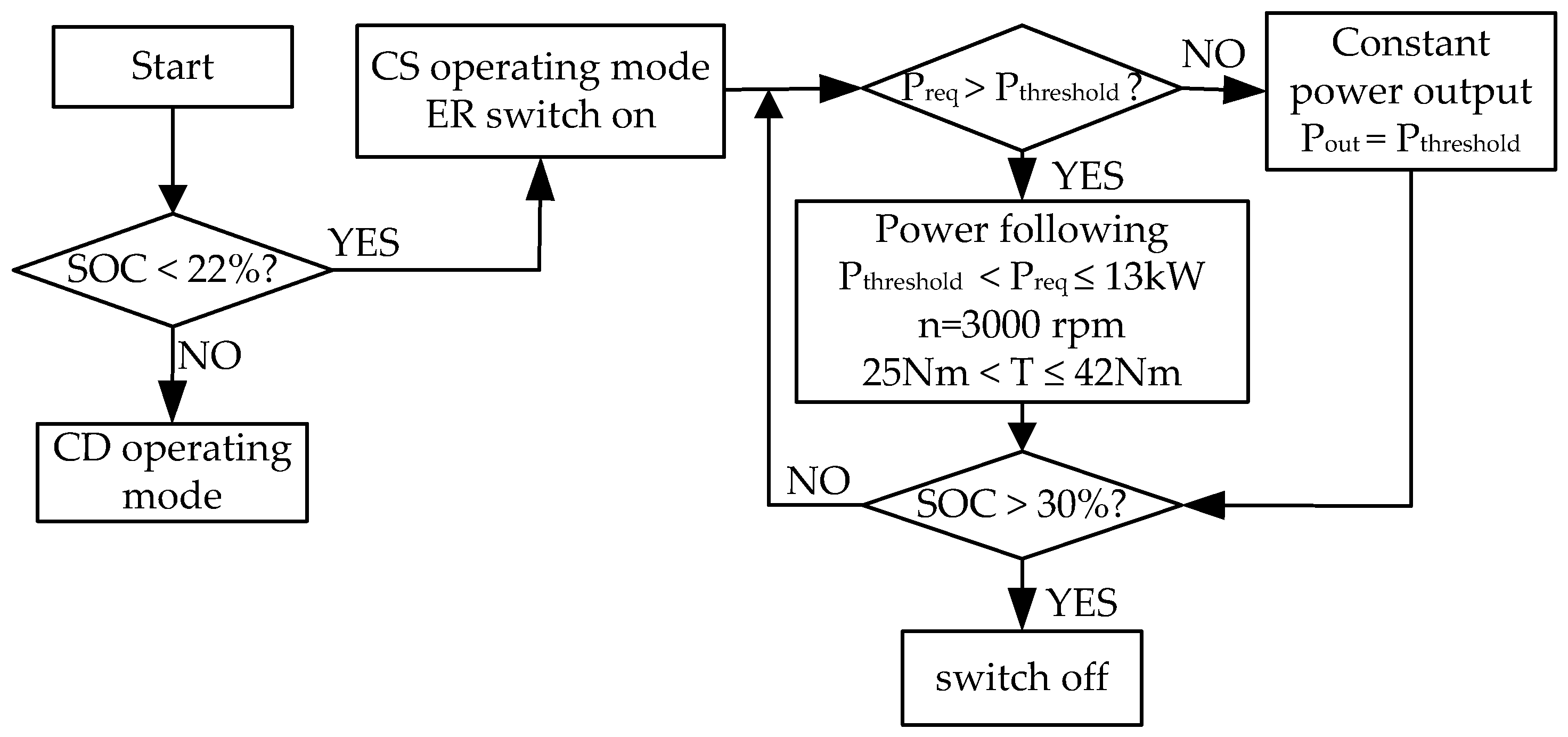
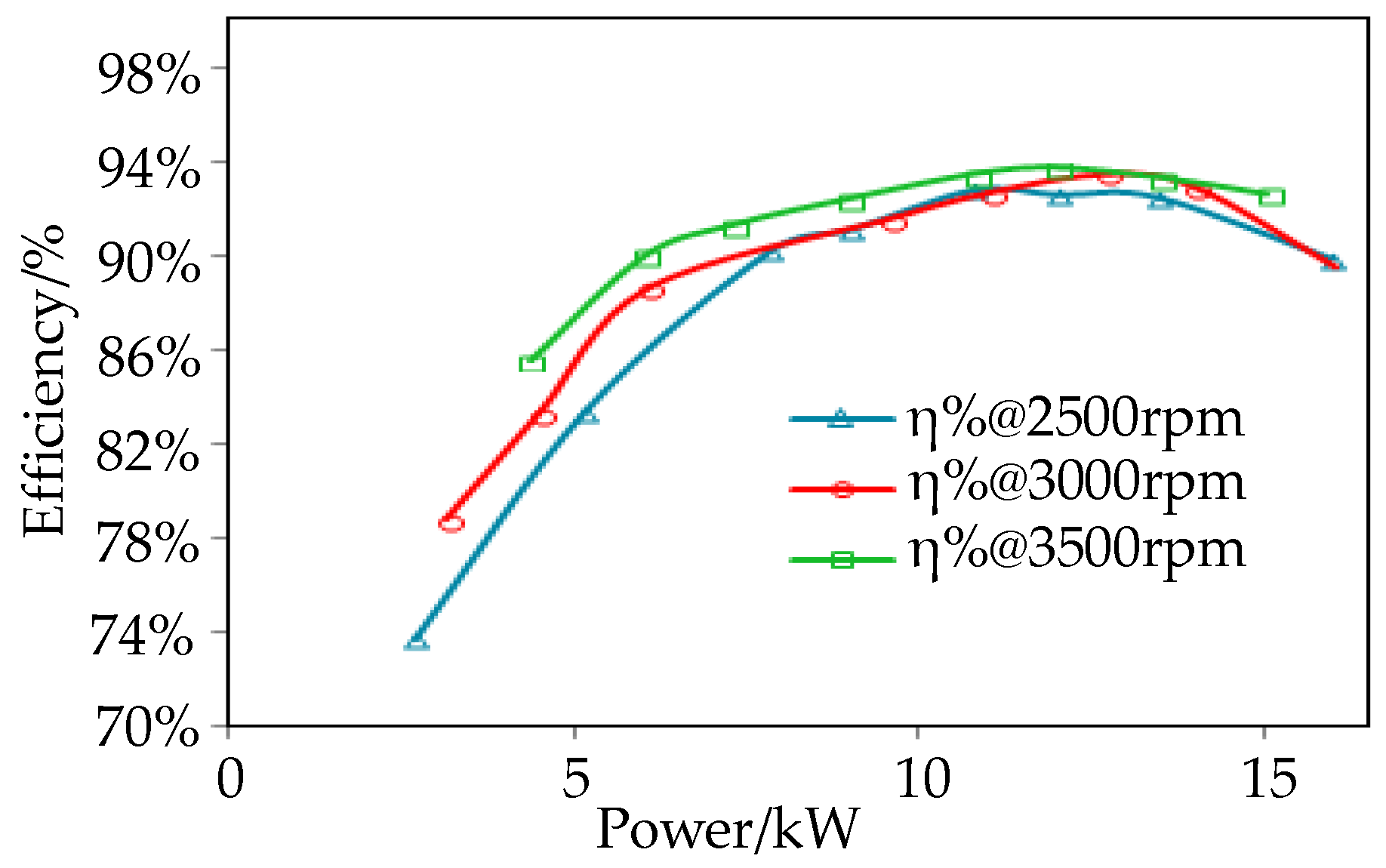
- In this study, to optimize the overall efficiency of RE, the efficient operating region is determined, and a partial power following control strategy is designed for an urban EREV application. The threshold power that determines the RE operation in power following mode is obtained using the evaluation of minimum fuel consumption. The control strategy achieved electrical decoupling between the engine speed control and generator torque control. The engine was controlled to operate at constant speed within the high efficiency region, and the generator current was regulated to achieve power following control.
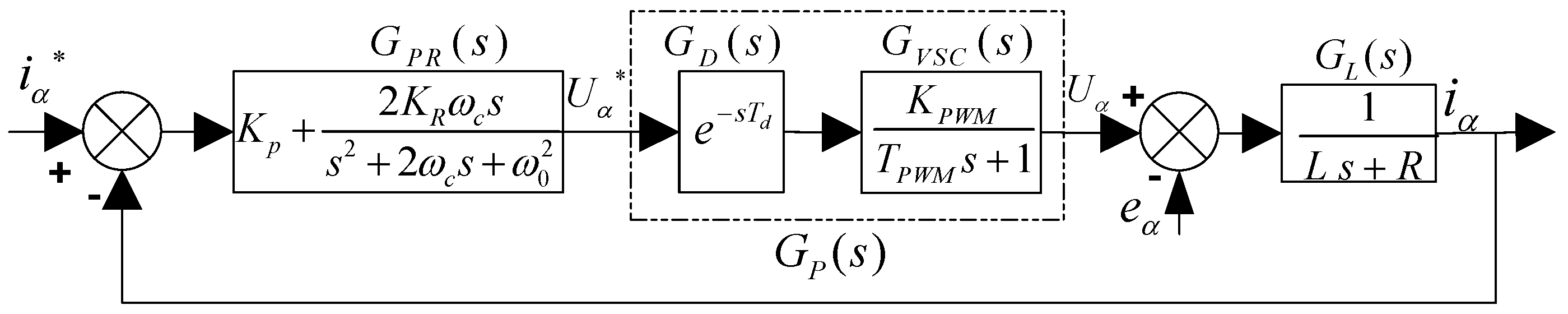
- A proportional resonance controller based on α-β coordinates is introduced into the current control loop to realize RE power following control. It has fast response and strong robustness characteristics.
- Using frequency response analysis, the relationship between the main parameters of the proposed control strategy and the stability margin were discussed and summarized. A general method for control system parameter design and stability design is proposed by using the control theory criterion, and the pre-Tustin is used for discretization of the PR controller.
- Simulation and experimental results show that the proposed control strategy has excellent stability and robustness. It can effectively balance the stability margin and transient performance to achieve better real-time tracking effects.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, M.; Sun, L.; Giuseppe, B.; Song, L.H. Advanced Electrical Machines and Machine-Based Systems for Electric and Hybrid Vehicles. Energies 2015, 8, 9541–9564. [Google Scholar] [CrossRef]
- Wu, X.G.; Du, J.Y. The economic analysis of a plug-in series hybrid electric vehicle in different energy management strategy. In Proceedings of the IEEE Vehicle Power & Propulsion Conference 2013, Beijing, China, 15–18 October 2013; pp. 1–5.
- Cheng, X.M.; Sun, F.C.; Ouyang, M.G. Output control of an auxiliary power unit of series hybrid electric vehicle. Trans. China Electrotech. Soc. 2007, 22, 69–76. [Google Scholar]
- Tian, S.; Cao, G.J.; Han, Q.; Li, J.; Yang, M. Modeling and Decoupling Control of ICE APU with Uncontrolled Rectifier in Series Hybrid Vehicle. In Proceedings of the IEEE Vehicle Power & Propulsion Conference, Windsor, UK, 6–8 September 2006; pp. 1–6.
- Dai, C.; Zhang, Z.R.; Qian, L. A new Range Extender with Doubly Salient Brushless DC Generator and Its Control Strategy. Trans. China Electrotech. Soc. 2013, 28, 138–144. [Google Scholar]
- Dorrell, D.G.; Knight, A.M.; Popescu, M.; Evans, L.; Staton, D.A. Comparison of different motor design drives for hybrid electric vehicles. In Proceedings of the Energy Conversion Congress and Exposition 2010, Atlanta, GA, USA, 12–16 September 2010; pp. 3352–3359.
- Wang, C.F.; Jin, M.J.; Shen, J.X.; Yuan, C. A permanent magnet integrated starter generator for electric vehicle onboard range extender application. IEEE Trans. Magn. 2012, 48, 1625–1628. [Google Scholar] [CrossRef]
- Gokasan, M.; Bogosyan, S.; Goering, D.J. Sliding mode based powertrain control for efficiency improvement in series hybrid-electric vehicles. IEEE Trans. Power Electron. 2006, 21, 779–790. [Google Scholar] [CrossRef]
- Liu, C.H.; Chau, K.T.; Jiang, J.Z. A permanent magnet hybrid brushless integrated starter-generator for hybrid electric vehicles. IEEE Trans. Ind. Electron. 2010, 57, 4055–4064. [Google Scholar] [CrossRef] [Green Version]
- Nemec, M.; Bajec, P.; Ambrozic, V. Power Converter Topology for Range Extender Module. In Proceedings of the Education and Reach Conference 2012, Amsterdam, The Netherlands, 13–14 September 2012; pp. 238–241.
- Choi, U.D.; Kim, K.T.; Kim, Y.N.; Kwak, S.H.; Kim, K.M.; Lee, S.D.; Jang, S.J.; Becksteard, K. Development of the Power Generator for Series Hybrid Electric Vehicle. In Proceedings of the International Forum on Strategic Technology 2006, Ulsan, Korea, 18–20 October 2006; pp. 447–450.
- Baumann, B.M.; Washington, G.; Glenn, B.C.; Rizzoni, G. Mechatronic design and control of hybrid electric vehicles. IEEE ASME Trans. Mechatron. 2000, 5, 58–72. [Google Scholar] [CrossRef]
- Schouten, N.J.; Salman, M.A.; Kheir, N.A. Fuzzy logic control for parallel hybrid vehicles. IEEE Trans. Control Syst. Technol. 2002, 10, 460–468. [Google Scholar] [CrossRef]
- Lin, C.C.; Peng, H.; Grizzle, J.W.; Kang, J.M. Power management strategy for a parallel hybrid electric truck. IEEE Trans. Control Syst. Technol. 2003, 11, 839–849. [Google Scholar]
- Perez, L.V.; Bossio, G.R.; Moitre, D.; Garcia, G.O. Optimization of Power Management in a Hybrid Electric Vehicle Using Dynamic Programming. Math. Comput. Simul. 2006, 73, 244–254. [Google Scholar] [CrossRef]
- Chen, R.; Luo, Y.G. Control System Development for the Diesel APU in Off-Road Hybrid Electric Vehicle; Society of Automotive Engineers Technical Paper: Warrendale, PA, USA, 2007; Volume 20, pp. 35–40. [Google Scholar]
- Zhu, Z.Q.; Howe, D. Electrical Machines and Drives for electric, Hybrid and Fuel Cell Vehicles. Process. IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Shen, Y.P.; He, Z.D.; Liu, D.Q.; Xu, B. Optimization of Fuel Consumption and Emissions for Auxiliary Power Unit Based on Multi-Objective Optimization Model. Energies 2016, 9, 90. [Google Scholar] [CrossRef]
- Hu, J.B. Improved Dead-Beat Predictive DPC strategy of grid-connected DC–AC converters with switching loss minimization and delay compensations. IEEE Trans. Ind. Inform. 2013, 9, 728–738. [Google Scholar] [CrossRef]
- Malinowski, M.; Jasinski, M.; Kazmierkowski, M.P. Simple direct power control of three-phase PWM rectifier using space-vector modulation (DPC-SVM). IEEE Trans. Ind. Electron. 2004, 51, 447–454. [Google Scholar] [CrossRef]
- Huang, J.J.; Zhang, A.M.; Chen, X.J.; Zhang, H.; Wang, J. A double switching table based Direct Power Control strategy for three-phase voltage source PWM rectifiers. Autom. Electr. Power Syst. 2012, 36, 128–133. [Google Scholar]
- Wu, Z.; Liu, C.H. Nonlinear PI control of DC/DC boost power converters based on current mode. Proc. CSEE 2011, 31, 31–36. [Google Scholar]
- Deng, C.; Huang, S.D.; Li, Z.Q.; Hu, J. Research on PMSM-SVM-DTC System Based on the Proportional Resonant Control. Trans. China Electrotech. Soc. 2013, 28, 501–507. [Google Scholar]
- Guo, Q.; Liu, H.P.; Peng, D.L.; Liu, P.; Zhang, Y. A novel control strategy and its parameter design of the current-loop in a Stationary Frame for current-source PWM rectifiers. Proc. CSEE 2014, 34, 2353–2361. [Google Scholar]
- Liserer, M.; Blaabjerg, F.; Hansen, S. Design and control of an LCL filter-based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Gandoy, J.D.; Lopez, O.; Malvar, J.; Fernandez-Comesana, P. Effects of discretization methods on the performance of resonant controllers. IEEE Trans. Power Electron. 2010, 25, 1692–1712. [Google Scholar] [CrossRef]
- Harnefors, L.; Yepes, A.G.; Vidal, A.; Doval-Gandoy, J. Passivity-based controller design of grid-connected VSCs for prevention of electrical resonance instability. IEEE Trans. Ind. Electron. 2015, 62, 702–710. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Values | Reference |
|---|---|---|---|
| MV | Total mass | ≤1400 kg | GB/T 19596 |
| V1 | Maximum velocity at ER switch on | ≥80 km/h | GB/T28382 4.5.1 |
| t | Acceleration time (0–50 km/h) | ≤7 s | GB/T 28382 4.5.2 |
| V2 | Maximum velocity at 4% slope | ≥70 km/h | GB/T28382 4.5.3 |
| V3 | Maximum velocity at 12% slope | ≥40 km/h | GB/T28382 4.5.3 |
| α | Gradeability | ≥20% | GB/T 28382 4.5.3 |
| fr | Rolling resistance coefficient | 0.013 | Asphalt pavement |
| CD | Aerodynamic drag coefficient | 0.4 | |
| Af | Front area of the vehicle | 1.96 m2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Lv, H.; Sun, Q.; Mi, Y.; Gao, P. A Proportional Resonant Control Strategy for Efficiency Improvement in Extended Range Electric Vehicles. Energies 2017, 10, 204. https://doi.org/10.3390/en10020204
Wang X, Lv H, Sun Q, Mi Y, Gao P. A Proportional Resonant Control Strategy for Efficiency Improvement in Extended Range Electric Vehicles. Energies. 2017; 10(2):204. https://doi.org/10.3390/en10020204
Chicago/Turabian StyleWang, Xiaoyuan, Haiying Lv, Qiang Sun, Yanqing Mi, and Peng Gao. 2017. "A Proportional Resonant Control Strategy for Efficiency Improvement in Extended Range Electric Vehicles" Energies 10, no. 2: 204. https://doi.org/10.3390/en10020204