Positioning and Imaging Detection of Corona Discharge in Air with Double Helix Acoustic Sensors Array



Abstract
1. Introduction
2. Acoustic Detection and Imaging Fusion Method
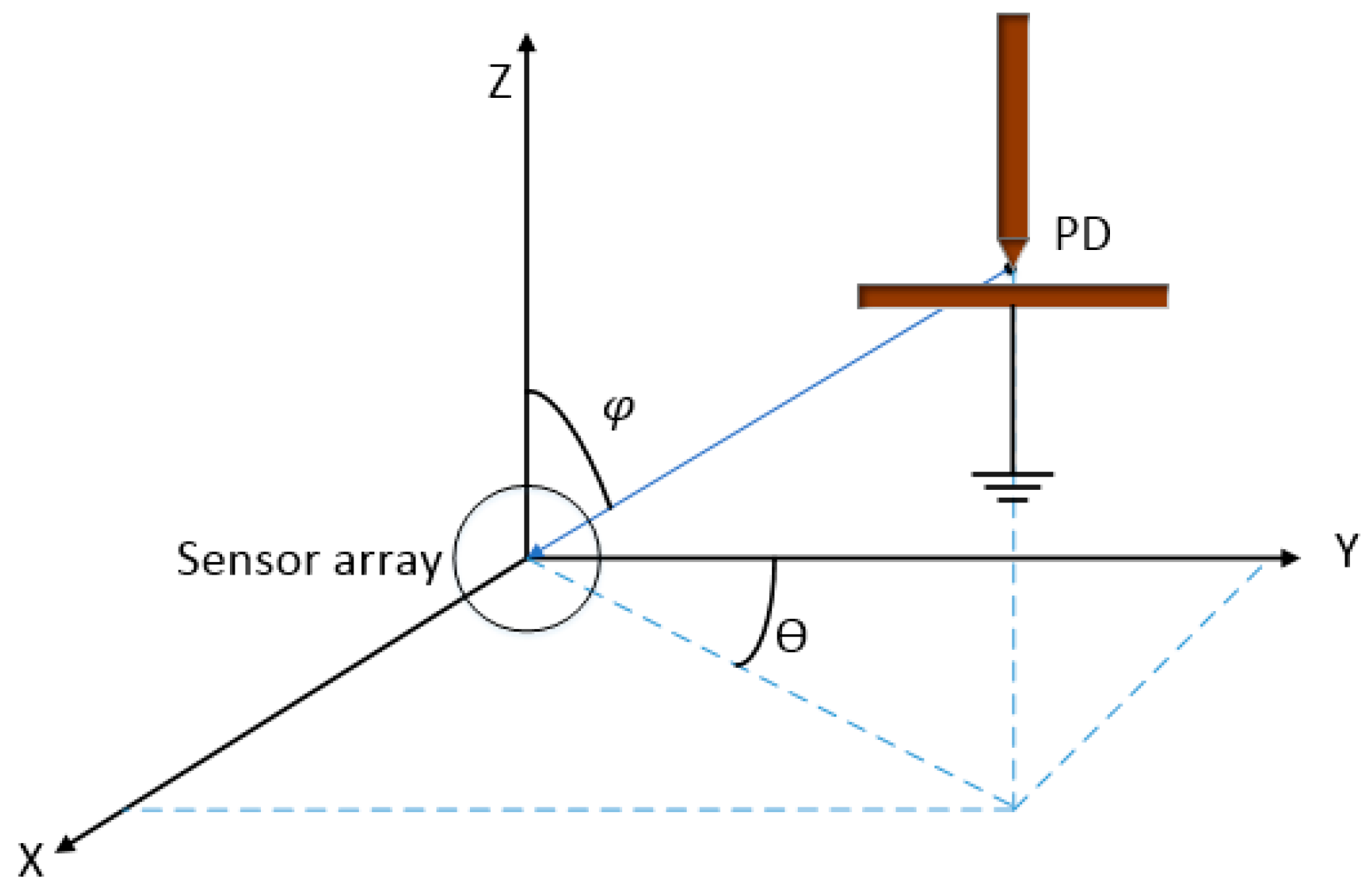
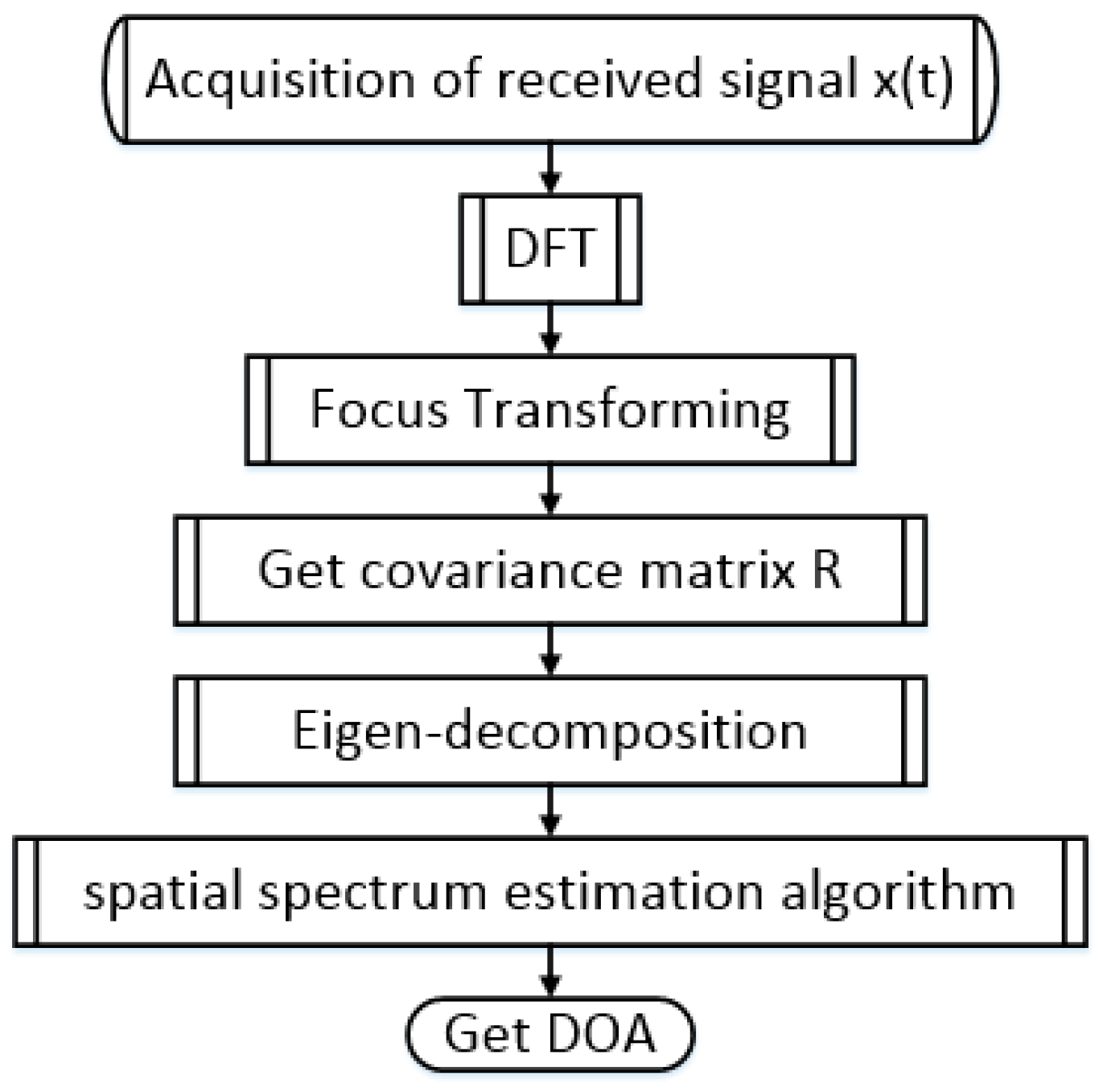
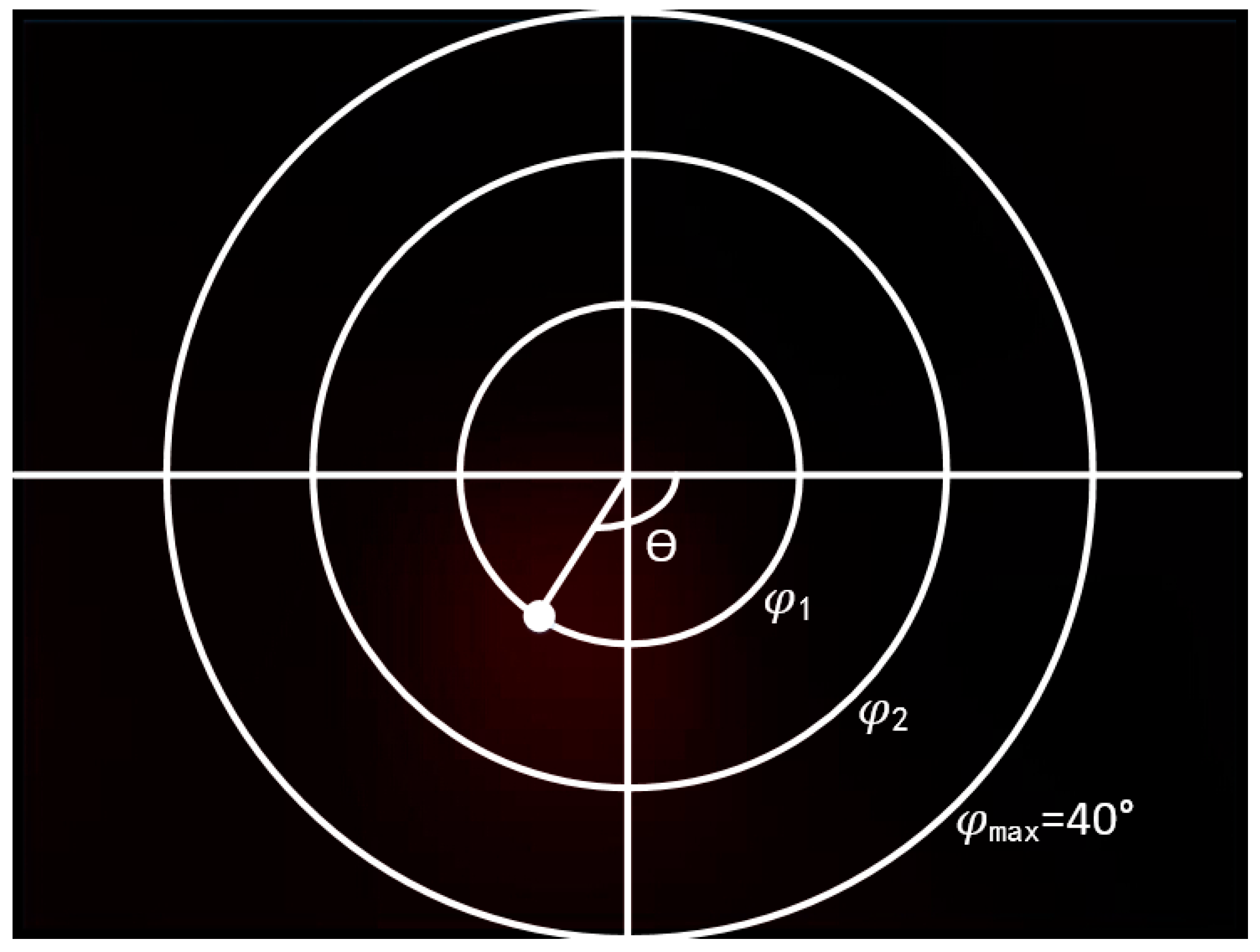
2.1. Acoustic Detection Method
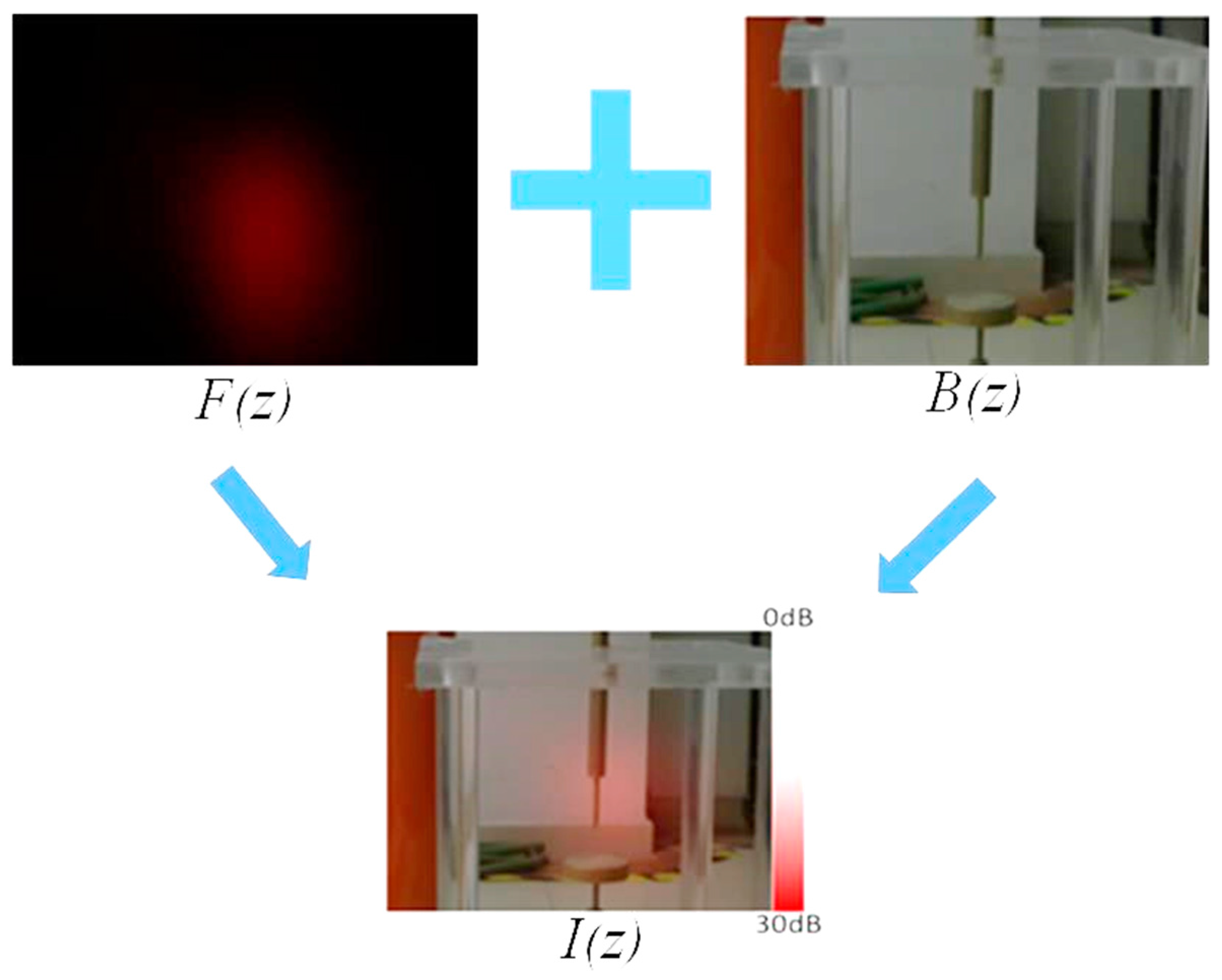
2.2. Image Fusion Method
3. Ultrasonic Sensor Array Design
4. Experimental Evaluation of the DHUA Sensor
4.1. Measurement System
4.2. Measurement System
4.3. Error of the Detection System
5. Practical Application of Acoustical Visual Detection in an Air Insulated Substation (AIS)
5.1. Measurement in AIS
5.2. Error of the Detection System
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AIS | Air Insulated Substation |
| AE | Acoustic-Emission |
| UHF | Ultra-High-Frequency |
| EM | Electromagnetic |
| PD | Partial Discharges |
| UV | Ultraviolet |
| HV | High Voltage |
| DHUA | Double-Helix-Ultrasonic-Array |
| GIS | Gas-Insulated-Switchgear |
| VHF | Very-High-Frequency |
| DOA | Direction of Arrival |
| MUSIC | Multiple Signal Classification |
| AD | Analog-to-Digital |
| TOA | Times-of-Arrival |
| DFT | Discrete Fourier Transform |
| TCT | Two-sided Correlation Transformation |
| RMS | Root-Mean-Square |
References
- Judd, M.D.; Farish, O.; Hampton, B.F. The excitation of UHF signals by partial discharges in GIS. IEEE Trans. Dielectr. Electr. Insul. 1996, 3, 213–228. [Google Scholar] [CrossRef]
- IEC-62478. High-Voltage Test Techniques-Measurement of Partial Discharges by Electromagnetic and Acoustic Methods. In Proposed Horizontal Standard, 1st ed.; International Electro Technical Commission (IEC): Geneva, Switzerland, 2016. [Google Scholar]
- Judd, M.D.; Li, Y.; Hunter, I.B.B. Partial discharge monitoring of power transformers using UHF sensors—Part I: Sensors and signal interpretation. IEEE Electr. Insul. Mag. 2005, 21, 5–14. [Google Scholar] [CrossRef]
- Albarracín, R.; Ardila-Rey, J.A.; Mas’ud, A.A. On the Use of Monopole Antennas for Determining the Effect of the Enclosure of a Power Transformer Tank in Partial Discharges Electromagnetic Propagation. Sensors 2016, 16, 148. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.S.; Ding, D.W.; Liu, W.D.; Feng, R. Location of PD by Searching in Space Using UHF Method. High Volt. Eng. 2009, 23, 535–511. [Google Scholar]
- Albarracín, R.; Robles, G.; Martínez-Tarifa, J.M.; Ardila-Rey, J. Separation of sources in radiofrequency measurements of partial discharges using time-power ratio maps. ISA Trans. 2015, 58, 389–397. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.Y.; Ji, S.C.; Li, J.Y.; Zhong, L.; Cui, Y.; Wang, W. Ultraviolet Images of 50-Hz AC Discharges in SF6 Atmosphere. IEEE Trans. Plasma Sci. 2014, 42, 2840–2841. [Google Scholar]
- James, R.E. Discharge detection in high-voltage power transformers. Proc. Inst. Electr. Eng. 1970, 117, 1352–1362. [Google Scholar] [CrossRef]
- Krim, H.; Forster, P.; Proakis, J.G. Operator approach to performance analysis of root-music and root min-norm. IEEE Trans. Signal Process. 1992, 40, 799–806. [Google Scholar] [CrossRef]
- Fuhr, J.; Haessing, M.; Boss, P.; Tschudi, D.; King, R.A. Detection and location of internal defects in the insulation of power transformers. IEEE Trans. Electr. Insul. 1993, 28, 157–167. [Google Scholar] [CrossRef]
- Markalous, S.M.; Tenbohlen, S.; Feser, K. Detection and location of partial discharge in power transformers using acoustic and electromagnetic signals. IEEE Trans. Dielectr. Electr. Insul. 2008, 15, 1576–1583. [Google Scholar] [CrossRef]
- Robles, G.; Albarracín, R.; Vázquez, J.L. Antennas in Partial Discharge Sensing System. In Handbook of Antenna Technologies; Chen, Z.N., Ed.; Springer: Singapore, 2015; pp. 1–47. [Google Scholar]
- Xie, Q.; Lv, F.C.; Li, C.R.; Li, C.; Wang, N.; Ding, Y. Method for PD location in oil combining ultrasonic phased array with wideband array signal processing. Proc. CSEE 2009, 29, 13–17. [Google Scholar]
- Lu, Y.; Tan, X.; Hu, X. PD Detection and Localizations by Acoustic Measurements in an Oil-filled Transformer. IEEE Proc. Sci. Meas. Technol. 2000, 147, 81–85. [Google Scholar] [CrossRef]
- Jing, R.K.; Li, J.Z.; Zhou, H.L. Research progress of ultrasonic NDT technology. Foreign Electr. Meas. Technol. 2012, 31, 28–30. [Google Scholar]
- Jin, S.J.; Yang, X.X.; Chen, S.Z. Development and application of ultrasonic phased array inspection technology. J. Electr. Meas. Instrum. 2014, 9, 925–934. [Google Scholar]
- Luo, Y.F.; Li, Y.M.; Liu, L.C. Simulation of PD location method in oil based on UHF and ultrasonic phased array receiving theory. Trans. China Electrotech. Technol. Soc. 2004, 19, 35–39. [Google Scholar]
- Luo, Y.F.; Ji, S.C.; Li, Y.M. Phased ultrasonic receiving planar array transducer for partial discharge location in transformer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 614–622. [Google Scholar]
- Xin, X.H.; Li, J.S.; Ji, H.Y. Study of Cross-shaped Ultrasonic Array Senor Applied to Partial Discharge Location in Transformers. Proc. CSEE 2013, 21, 154–162. [Google Scholar]
- Li, T.; Xu, Y.Q.; Yang, Y.L. Development and experimental study of PD positioning system based on a circular ring ultrasonic array sensor. Electr. Meas. Instrum. 2015, 14, 110–123. [Google Scholar]
- Li, Y.Q.; Wang, F.; Wang, C. Experimental Study of PD Ultrasonic Location Based on Cross-shaped Ultrasonic Array Sensor. Insul. Mater. 2014, 6, 74–78. [Google Scholar]
- Wang, Y.L.; Chen, H.; Peng, Y.N.; Wan, Q. Spatial Spectrum Estimation Theory and Algorithm, 1st ed.; Tsinghua University Press: Beijing, China, 2004. [Google Scholar]
- Xie, Q. Research on Partial Discharge Ultrasonic Array Location Method in Transformer Based on Spatial Spectrum Estimation; North China Electric Power University: Baoding, China, 2010. [Google Scholar]
- Xie, Q.; Zhang, L.J.; Cheng, S.Y.; Hou, S.; Peng, L.; Lv, F. Application of the fast ICA algorithm to PD ultrasonic array signal De-noising. Proc. CSEE 2012, 32, 160–166. [Google Scholar]
- Wu, H.; Xu, D. Survey of digital image compositing. J. Image Graph. 2012, 11, 1333–1346. [Google Scholar]
- Hou, S.S. Study on the Method of Partial Discharge Ultrasonic Array Sensors’ Sparse Design. Master’s Thesis, School of Electrical and Electronic Engineering, North China Electric Power University, Beijing, China, 2014. [Google Scholar]
- Wu, S. Research on Fault Diagnosis of Power Transformer Based on Acoustic Features; Huazhong University of Science & Technology: Wuhan, China, 2012. [Google Scholar]
- Xie, Q.; Cheng, S.Y.; Geng, J.H.; Lv, F.C.; Hou, S.S. A Quantitative Evaluation Method for Acoustic Performances of Partial Discharge’s Ultrasonic Array Sensors. Proc. CSEE 2014, 34, 956–970. [Google Scholar]
- Rojas-Moreno, M.V.; Robles, G.; Albarracín, R.; Ardila-Rey, J.A.; Martínez-Tarifa, J.M. Study on the self-integration of a Rogowski coil used in the measurement of partial discharges pulses. Electr. Eng. 2016, 163, 1–10. [Google Scholar]
- IEC-60270. High-Voltage Test Techniques-Partial Discharge Measurements, 3rd ed.; International Electrotechnical Commission (IEC): New Delhi, India, 2000. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Array Types | BW0 | BW0.5 |
|---|---|---|
| Rectangle array | 60° | 31.21° |
| Circle array | 55.80° | 51.82° |
| Six concentric circles array | 55.00° | 33.14° |
| Double-helix-array | 41.10° | 24.70° |
| Applied Voltage/kV | Partial Discharge (PD)/pC | Test Distance (m) |
|---|---|---|
| 9.7 (inception) | 100 pC | [1.46] |
| 12.5 | 1400 | [1.46~2.46] |
| 13 | 2100 | [1.46~2.46] |
| 13.5 | 2600 | [1.46~3.46] |
| 14 | 3800 | [1.46~4.46] |
| 16.1 (critical breakdown) | 8000 | [1.46~7.46] |
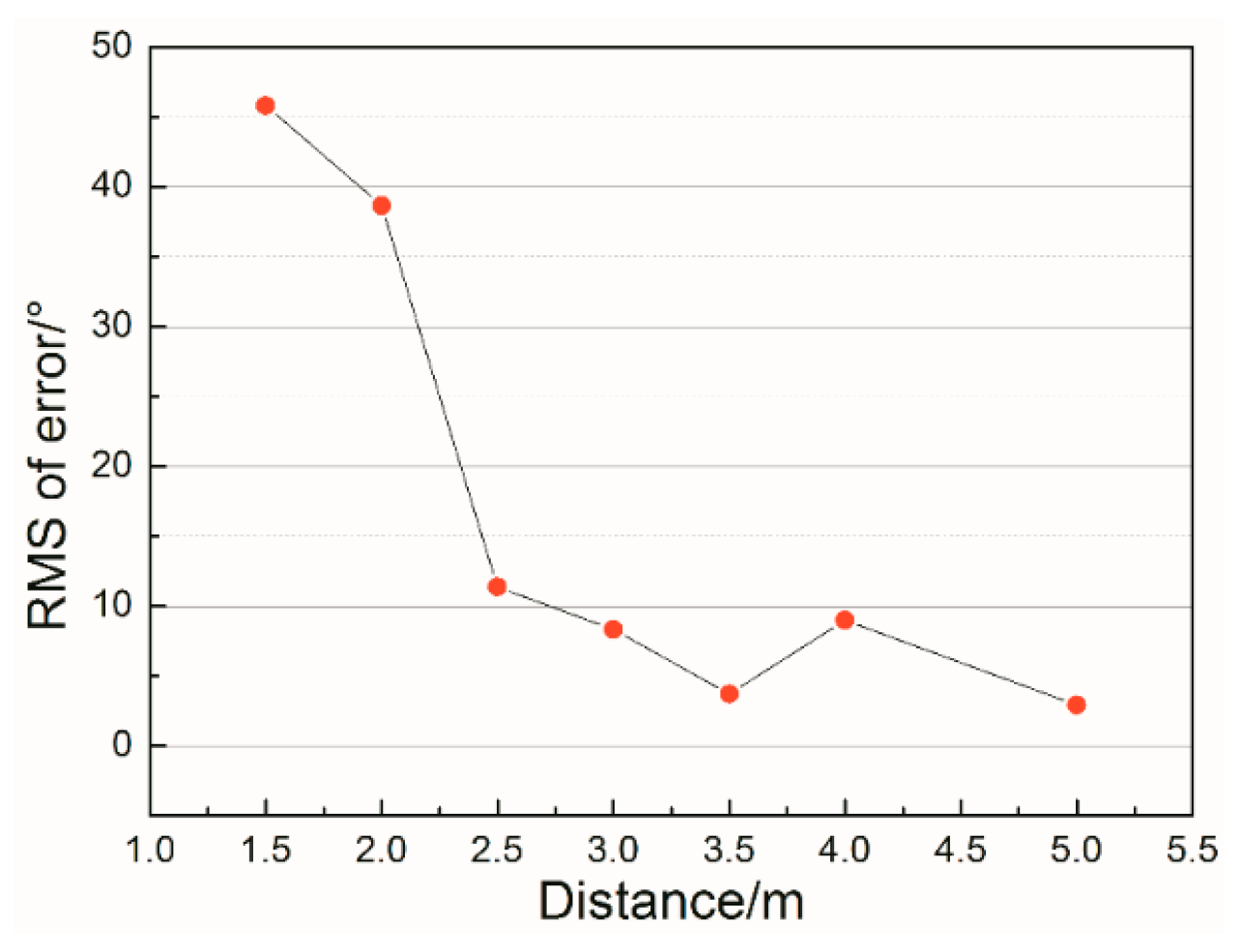
| Site | Distance/m | Set Up Angle (θ,φ)/° | DOA Angle (θ,φ)/° | Error (Δθ,Δφ)/° | Root Mean Square (RMS)/° |
|---|---|---|---|---|---|
| Lab | 1.5 | (122.31,28.45) | (147.5,66.7) | (25.19,38.25) | 45.79 |
| 2 | (191.37,3.28) | (194.5,41.8) | (3.13,38.52) | 38.64 | |
| 2.5 | (173.02,38.49) | (178.4,48.5) | (5.38,10.01) | 11.36 | |
| 3 | (202.61,39.71) | (208.5,45.6) | (5.89,5.89) | 8.31 | |
| 4 | (203.09,44.23) | (206.5,45.7) | (3.41,1.47) | 3.71 | |
| 5 | (194.18,50.98) | (196.6,52.6) | (2.42,1.62) | 2.91 |
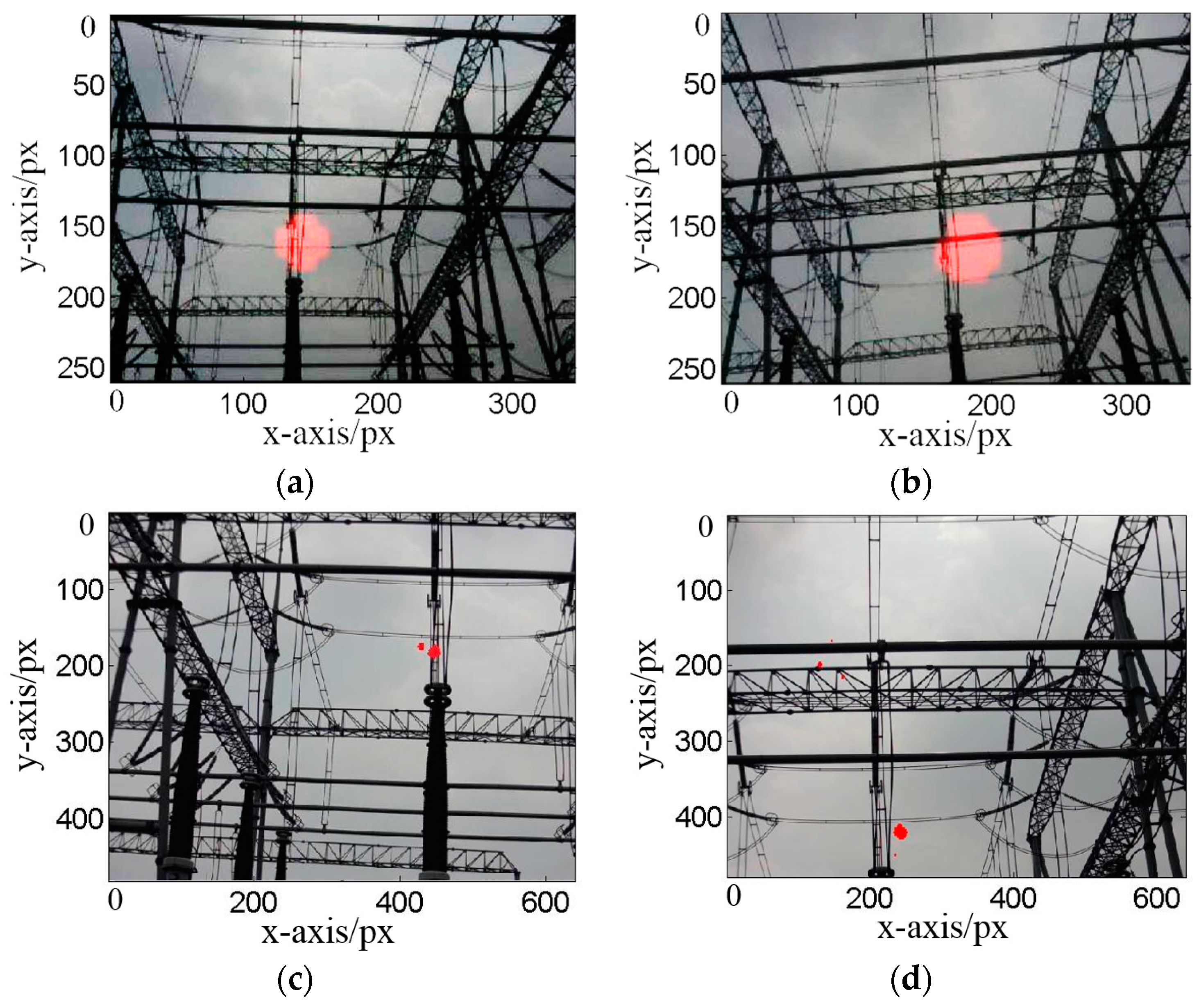
| Object | Distance/m | Real Corona PD Position/px | Marked Position/px | Error/px | RMS of Error/px |
|---|---|---|---|---|---|
| (a) Acoustic | 25 | (166,172) | (181,170) | (15,2) | 15.13 |
| (b) Acoustic | 30 | (135,149) | (144,162) | (9,13) | 15.81 |
| (c) UV | 25 | (443,184) | (443,120) | (0,64) | 64 |
| (d) UV | 30 | (244,420) | (209,361) | (35,59) | 68.60 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, M.; Ma, A.; Ren, M.; Zhang, C.; Xie, J.; Albarracín, R. Positioning and Imaging Detection of Corona Discharge in Air with Double Helix Acoustic Sensors Array. Energies 2017, 10, 2105. https://doi.org/10.3390/en10122105
Dong M, Ma A, Ren M, Zhang C, Xie J, Albarracín R. Positioning and Imaging Detection of Corona Discharge in Air with Double Helix Acoustic Sensors Array. Energies. 2017; 10(12):2105. https://doi.org/10.3390/en10122105
Chicago/Turabian StyleDong, Ming, Ao Ma, Ming Ren, Chongxing Zhang, Jiacheng Xie, and Ricardo Albarracín. 2017. "Positioning and Imaging Detection of Corona Discharge in Air with Double Helix Acoustic Sensors Array" Energies 10, no. 12: 2105. https://doi.org/10.3390/en10122105
APA StyleDong, M., Ma, A., Ren, M., Zhang, C., Xie, J., & Albarracín, R. (2017). Positioning and Imaging Detection of Corona Discharge in Air with Double Helix Acoustic Sensors Array. Energies, 10(12), 2105. https://doi.org/10.3390/en10122105