1. Introduction
Microgrids can be considered autonomous small-type power distribution systems, which are integrated with several types of distributed energy resources (DERs) and loads [
1]. For microgrids incorporating photovoltaic and wind power generation, storage and a conventional power grid [
2], presents a mathematical model of a DC microgrid, and this model is utilized to propose, implement and analyze a new system of voltage management in this microgrid. In [
3], for microgrids including the increased penetration of renewable energy sources, storage batteries, DERs and loads, a robust energy management solution to facilitate the optimum and economic control of energy flows throughout a microgrid network, was proposed. Due to the differences in infrastructure and natural conditions, each microgrid contains distinct DERs and loads; it is beneficial to enhance the reliability and lower the expense if several microgrids are interconnected into microgrid clusters (MGC) for operation [
4]. At present, the research on MGC is still at the initial stage—in [
5], a hierarchical control structure including primary, secondary, and tertiary levels was proposed, to handle power sharing among a cluster of DC microgrids. A consensus-based, distributed control strategies for voltage regulation and power flow control of DC microgrid clusters was presented in [
6] and an SOC-based adaptive droop method was introduced at the primary level to equalize SOC of batteries inside each microgrid (MG). Decentralized control of two DC microgrids interconnected with a tie-line was examined in [
7], and a decentralized control approach was proposed to control each MG and bus voltage fluctuation in an allowable range. A real-time tertiary control algorithm for DC microgrids was developed and implemented in [
8], and to overcome renewable energy intermittency, the developed algorithm virtually aggregated neighboring microgrids into clusters. Aimed at microgrid clusters, including AC and DC sub-microgrids, an autonomous coordination control strategy was applied in [
9]. However, the above references [
5,
6,
7,
8,
9] put an emphasis on DC microgrids, and did not take operating costs into consideration, so these methods lack economy. Aimed at AC microgrid clusters, traditional droop control is often applied in autonomous microgrids; however, this control distributes power by the capacity ratio [
10], so it is easy to make the total operational costs higher as the generation costs and operating characteristics of different types of DERs are varied. The centralized optimization is effective for improving economy, as it will take advantage of information from all DERs, and computes the optimal result in the central system, then sends the regulating commands to the DERs. Although the accuracy is high, it is vulnerable to central point of failures and communication failures, so its reliability is low.
In recent years, distributed economic operation of microgrids has attracted researchers’ attention. For distributed economic dispatch, an extended distributed model predictive control framework has been applied to a smart grid case study. Specifically, a combined environmental and economic dispatch problem was formulated and solved in [
11]. In [
12], the framework of real-time collaborative dispatch was proposed by using the multi-agent consensus theory to solve a real-time dispatch problem in the islanded multi-microgrid. The problem of electrical energy transaction between islanded MGs was optimized by making use of a sub-gradient cost minimization algorithm, in [
13,
14]. A projected gradient and finite-time averaged consensus algorithm was used to deal with an economic dispatch problem, including thermal generators and wind turbines, in [
15]. For distributed control, most references are aimed at distributed secondary control [
16,
17,
18,
19]; few papers put an emphasis on economic control. A kind of economic nonlinear droop controller was designed in [
20,
21,
22] to make expensive DERs generate less power, and more power is produced by cheaper DERs. The proposed controller can effectively lower the operating expense; however, it is designed on the basis of DER generation costs, instead of marginal costs, thereby it cannot realize the optimal operation of DERs. Moreover, secondary frequency and voltage regulation are not considered in these papers. By considering the optimal economic operation, Chen Su [
23] proposed a kind of marginal costs-voltage droop control, however equal marginal costs are not realized in primary control because of heterogeneous line impedance, which means secondary control must be used to finish this function—this makes the system become complicated. In addition, renewable energy and storage devices are not considered in this paper. To achieve identical marginal costs among DERs, a kind of autonomous three-level controller was presented in [
24]; however, its dynamic response was slower, due to the adoption of a lower-pass filter that was used to reduce the effect of non-linear droop control on the system stability. In [
25], which was aimed at the traditional droop-controlled microgrids, a consensus algorithm was designed to realize the economic operation based on equal incremental rate; however, the system stability was weaker because the dominant mode had to be used to control the direction of the increasing or decreasing marginal costs.
For AC microgrid clusters, considering economy requirements, this paper makes a contribution in the following areas; (i) an adaptive economic droop control framework, considering line loss among sub-microgrids is proposed; (ii) Apart from traditional power constraints of DERs, the capacity limits of storage units are also considered, i.e., if the storage has increased to 80% or decreased to 20% of its capacity, its adaptive controller is applied to draw the power of the storage to zero. (iii) to effectively restore the system frequency, a distributed secondary frequency controller (DSFC) is proposed to complete this goal in a distributed way and (iv) the whole design effectively lowers the operating costs of MGC.
Apart from the above original contributions, virtual impedance is used in a low-voltage network, where line impedance is mainly determined by resistive, to ensure that the output impedance is desirable at the line frequency [
26,
27] and a distributed secondary voltage controller (DSVC) from [
10] is used to reach a compromise between reactive power averaging and voltage regulation, by choosing proper weight coefficients.
The paper is organized as follows:
Section 2 specifically introduces the problem of economic control in MGC, and the marginal costs of different types of DERs, which are modeled based on their power characteristics, are all listed by the condition of line loss (with vs. without) among sub-microgrids. Adaptive economic droop control is proposed in
Section 3; specifically, marginal costs-frequency droop control is applied, and consensus-based adaptive controller is also given at length here. DSFC and DSVC are both presented in
Section 4. In
Section 5, The implementation process of the overall distributed economic control, including the communication network topology of MGC and the overall control architecture, is clearly described. The proposed controllers are tested in
Section 6 under a range of conditions.
Section 7 gives a conclusion for this paper.
2. The Problem of Economic Control
On the basis of stable operation of MGC, economic control is mainly aimed at considering the economic factors to real-time control the relevant parameters, to achieve the lowest operating costs. In this paper, we do not consider the generation costs from reactive power, and only consider those from active power.
The generation costs from active power can be all written as a quadratic function, regardless of different types of DERs [
20]. Here, we consider three kinds of DERs, respectively, conventional generators, renewable generators and storage devices.
For conventional generators, the generation costs can be expressed as a convex quadratic function, as shown in Equation (1):
where
is the active power of the generator
i,
is the power maximum of the generator
i,
are positive cost coefficients of conventional generators.
is the generation cost of generator
i.
is the number of conventional generators.
To promote the effective use of renewable energy, we adopt a pseudo generation cost in this paper. According to [
28], the generation costs of solar power or wind power can be formulated as:
where
is the predicted power capacity that can be obtained from maximum power prediction technology,
is a convex quadratic cost function for a renewable generator
j.
is the number of renewable generators. Compared with Equation (1), we can consider
, so the same expression of cost function can be achieved between conventional generators and renewable generators. Moreover, the generation cost tends to zero as the power increases to
. This means that when the generation cost arrives at the minimum, the lowest renewable energy curtailment can be simultaneously obtained.
The generation cost function of battery
k can be formulated as:
where
is a continuous convex quadratic function for battery
k;
are non-negative cost parameters; and
is the number of battery.
is the charging or discharging power that represents discharging to the load if
is positive, on the contrary, battery
k is charged from other DERs if
is negative.
is the largest discharging power of battery
k.
2.1. Marginal Costs without Considering Line Loss
When line loss is not considered, the marginal cost of a DER is the derivative of the corresponding generation cost, as shown in Equations (1)–(3)—we can call it traditional marginal costs (TMC) in this paper. According to equal incremental rate criteria [
25], the whole operating expenses of microgrids can be the minimum if TMC from DERs are all the same.
The marginal cost of conventional generator
i and renewable generator
j can be respectively described as:
From Equation (5), it can be clearly seen that the marginal costs of conventional generators are always greater than those of renewable generators. This means that renewable generators always have a priority to generate power for achieving effective use of renewable energy.
The marginal cost of battery
k is also a continuous function because the gradient of cost function at
is 0, as listed in Equation (6); this guarantees the availability of equal increment rate criteria. In this paper,
,
is, respectively, the cost coefficient for discharging/charging, and
is much larger than
.
From Equations (4)–(6), according to equal increment rate criteria, two scenarios should also be considered, as follows:
In the light load scenario, conventional generators do not generate any power—the power can be distributed among renewable generators and storage devices. According to equal increment rate criteria, storage k will be charged to achieve marginal costs, similar to that of renewable generators, and this is feasible in practical operating conditions.
By contrast, in the heavy load scenario, the power of renewable generators reach their upper limits and the rest of the power can be distributed by conventional generators and storage devices, i.e., storage k will discharge in this case.
Moreover, in the light load scenario where equal marginal costs are realized among renewable generators, the active power of arbitrary renewable generators,
m and
n, are also proportional to their predicted power capacity, as follows:
2.2. Marginal Costs with Considering Line Loss
When line loss among sub-microgrids is considered, marginal costs with line loss (LLMC) should be applied in the economic control of MGC. In this paper, only line loss among sub-microgrids is considered. In this condition, equality constraint Equation (8) should be considered on the basis of the objective function Equation (9).
where
is the total active power load, and
is the sum of line loss.
are, respectively, the number of conventional generators, renewable generators and storage devices.
According to Equations (8) and (9), using Lagrange multiplier
λ, Lagrange function can be given as:
The LLMC (
) of conventional generators, renewable generators and storage devices is, respectively, the value of λ at the extremum of Lagrange function. Therefore, LLMC can be listed as:
Similarly,
can also be solved as:
where
is called the line loss correction factor (LLCF).
Let us compute LLCF, for the active power of the branch,
i-j, in the AC electrical network under the condition of neglecting earth branch can be expressed as:
where, the voltage of node
i,
j is
. The conductance and susceptance of the branch
i-j are, respectively,
and
; resistance and reactance are separately,
and
. AC microgrids are low voltage networks and line resistance is mainly resistive, so
,
. Due to
being small,
. Therefore, (13) can be simplified as:
Therefore, the node injection power
is expressed as:
where
is the electrical source of node
i from conventional generators, renewable generators or storage devices;
is the load of node
i;
shows that the node
j must be directly connected with node
i, but the condition
i =
j is not included.
The sum of line loss is the sum of node injection power,
The LLCF of DER
i can be computed from (15) and (16),
From Equations (11), (12) and (17), the LLMC of conventional generators, renewable generators and storage devices can be all obtained. In a MGC, the total cost is the least if the LLMC of all DERs are the same.
In this paper, there are two types of operation modes—autonomously and collectively—for sub-microgrid
i. Due to the relatively small scale for sub-microgrids, line loss is not considered in autonomous mode. In contrast, line loss between sub-microgrids needs to be included in collective mode. The corresponding marginal costs in two modes are respectively listed in Equation (18).
5. The Implementation of the Overall Distributed Economic Control
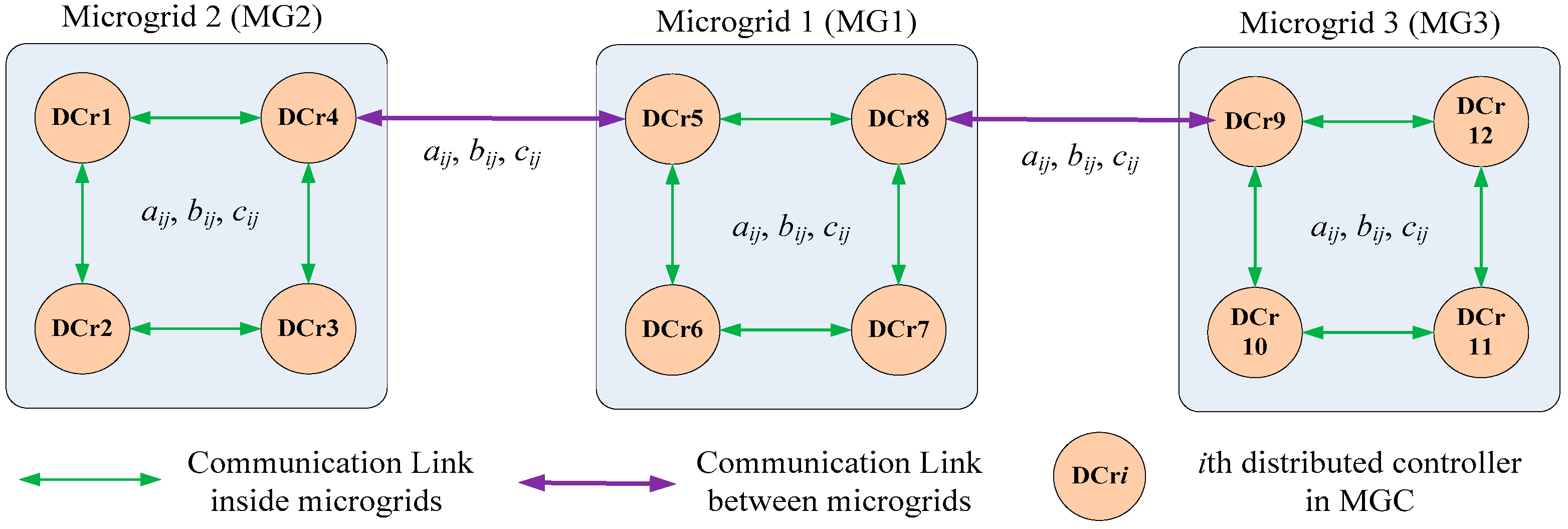
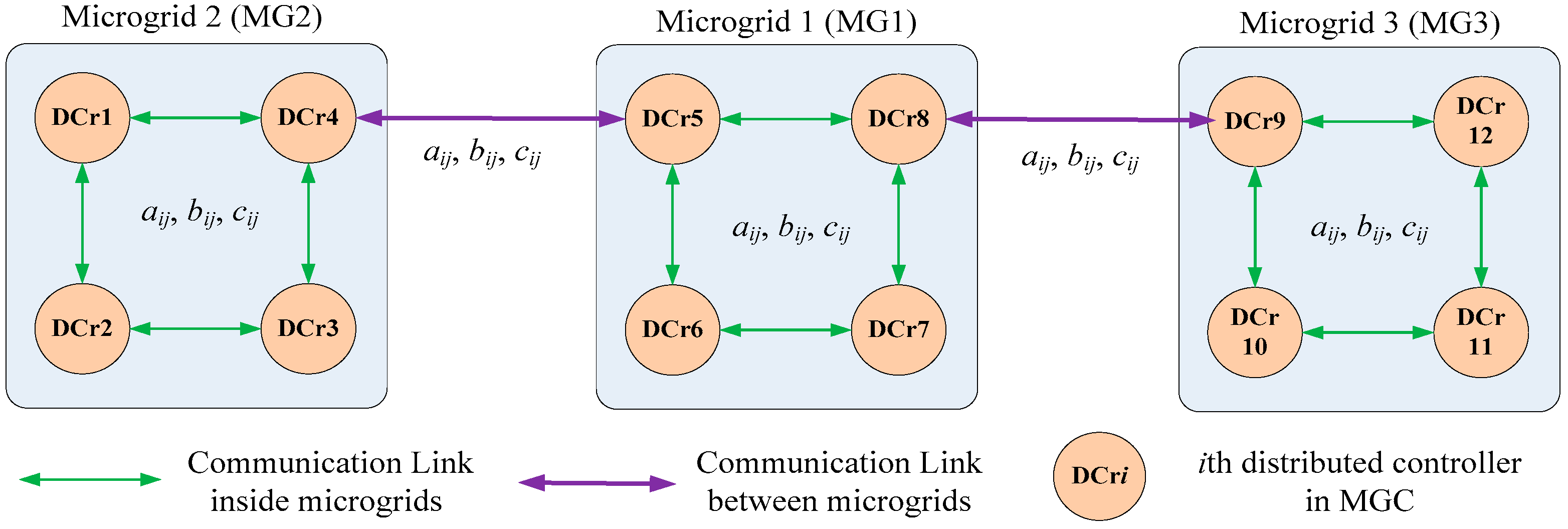
5.1. Communication Network Topology of MGC
The communication network topology of distributed economic control of MGC under study in this paper is shown in
Figure 1, including the communication network inside sub-microgrids and between sub-microgrids. Each DER is configured with a distributed controller (DCr), which is responsible for communication and distributed strategy. In autonomous mode, each DCr exchanges with each other through the communication network inside sub-microgrids. In collective mode, one or two DCrs inside sub-microgrids are chosen to communicate with their neighbor’s sub-microgrids, and so the communication link between sub-microgrids is built. The proposed strategy makes use of original distributed controller of each DER, and combines the control of single microgrids and the control of MGC. In addition, it is unnecessary to configure the controller for MGC, and therefore lower the installation costs.
Moreover, the calculation of LLCF needs to obtain the voltage magnitudes of the connected nodes in the electric circuit, so the interconnected nodes in electric circuit need to be equipped with communication links, and for unconnected nodes, it is optional whether to communicate according to optimization network topology. It is worthwhile to mention that varies with different consensus network topology, in different operating modes.
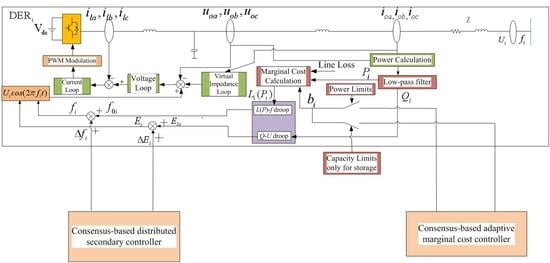
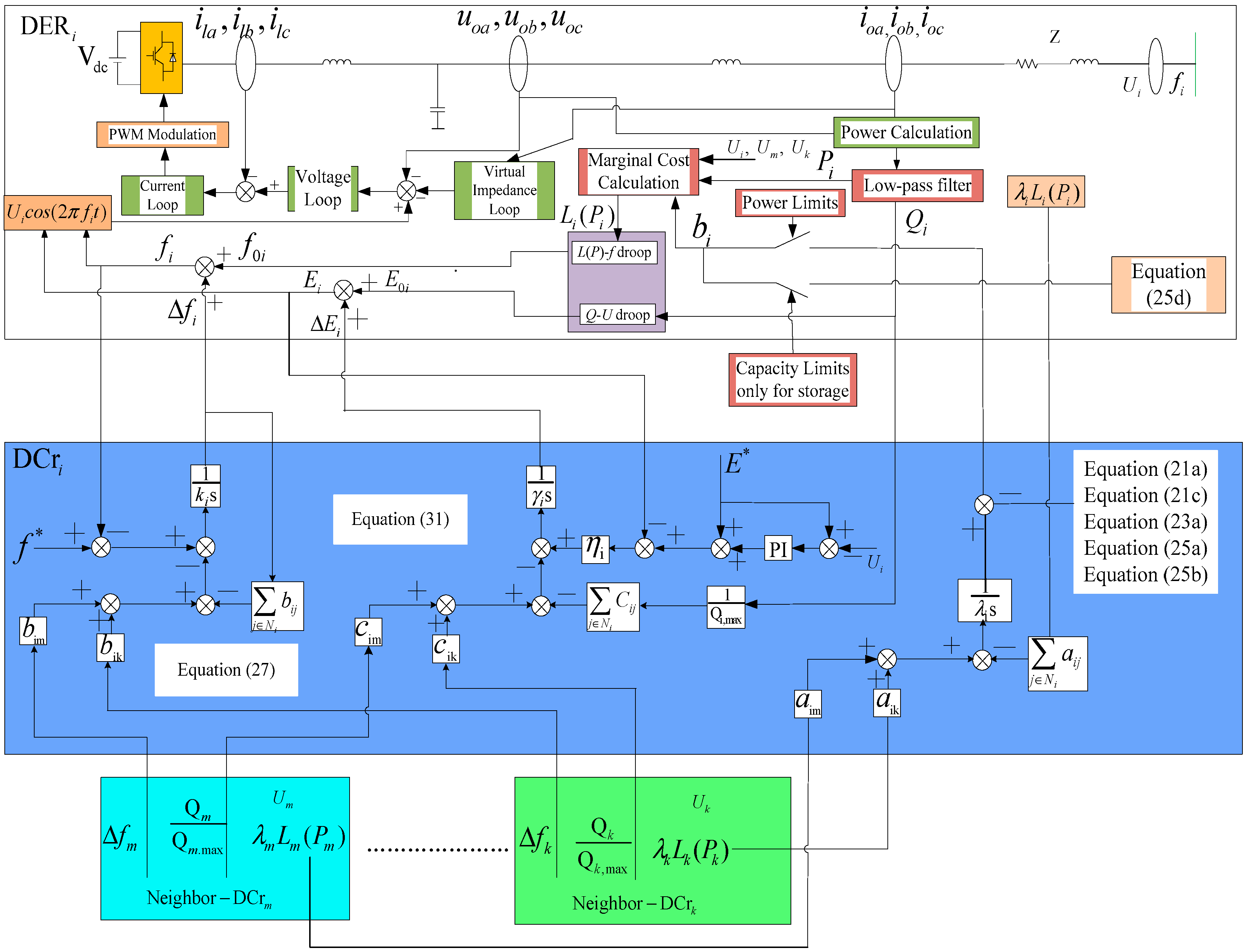
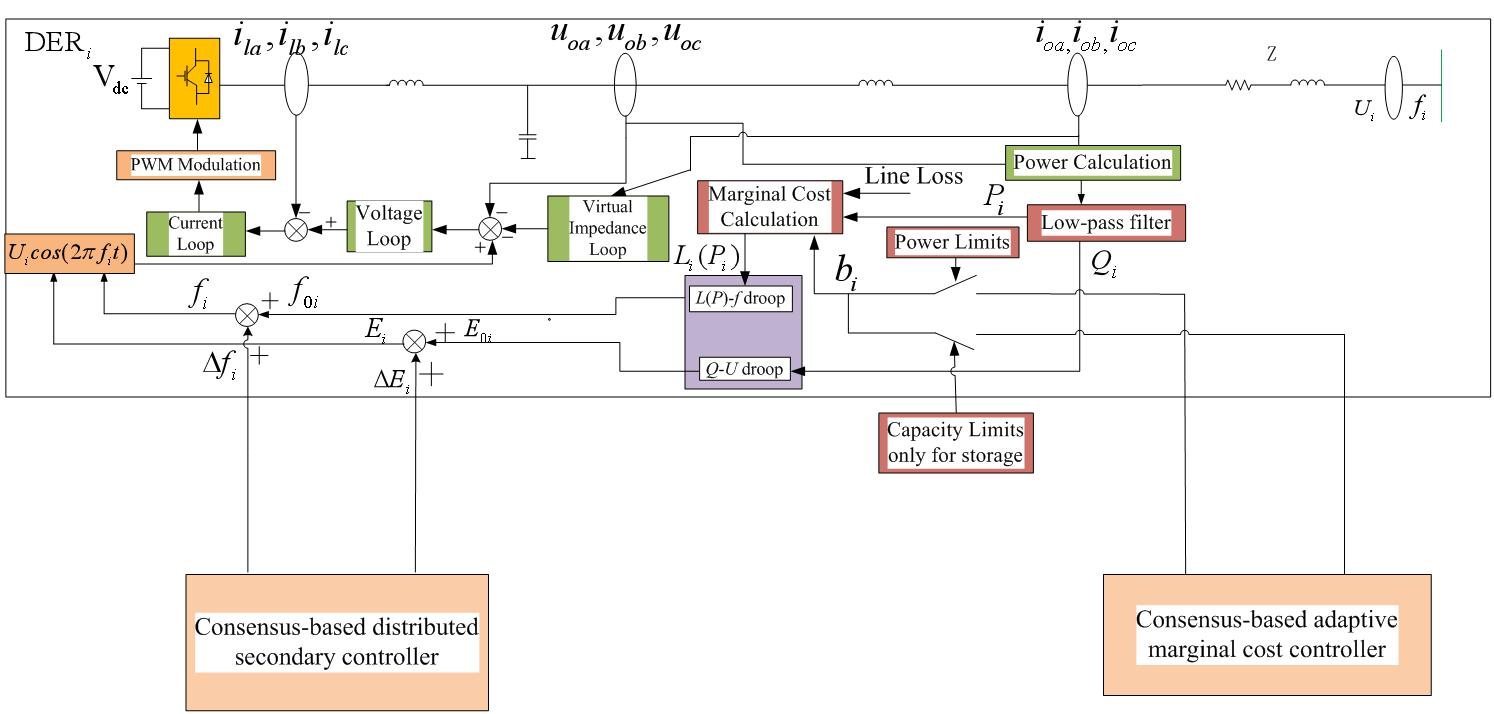
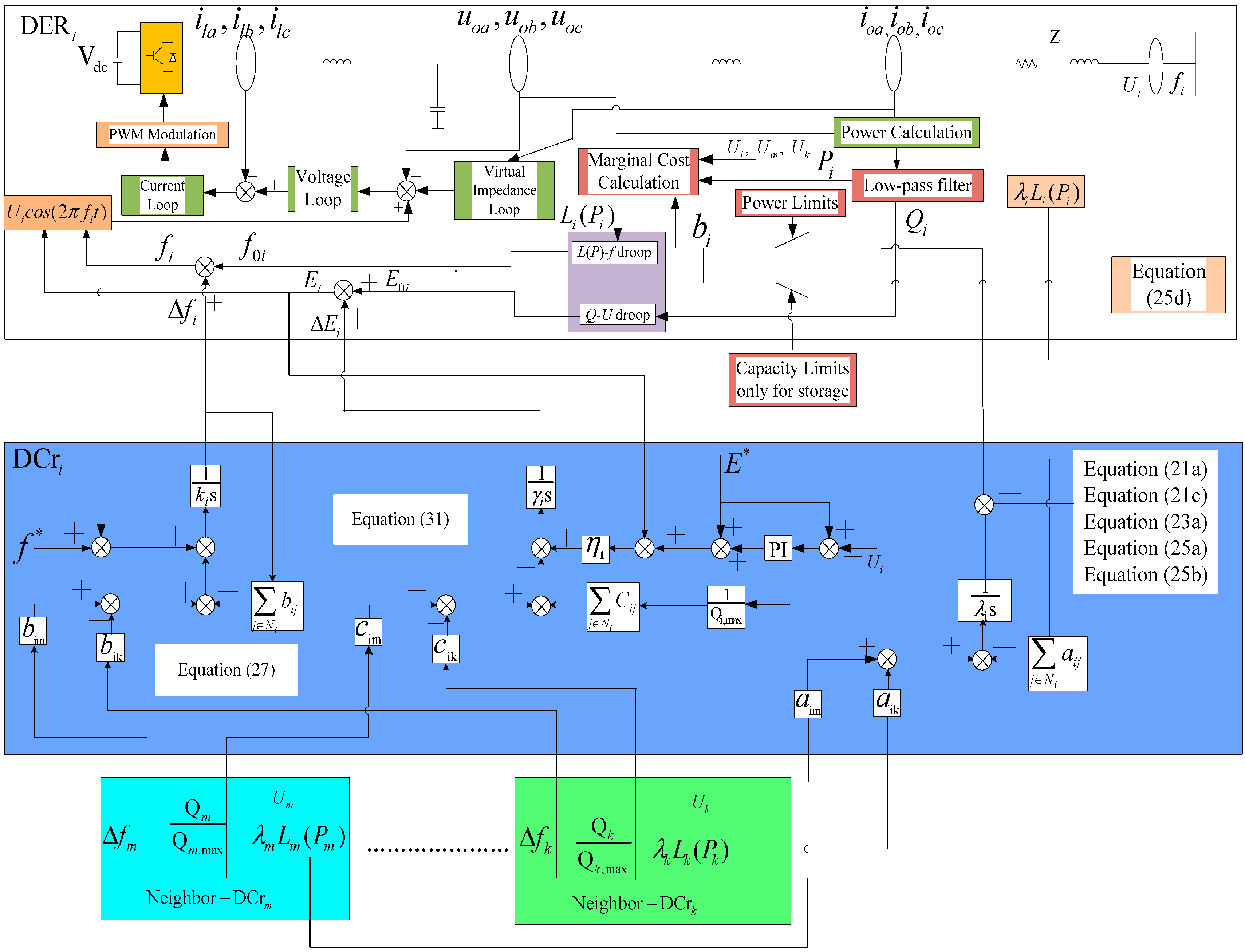
5.2. Overall Control Architecture
A detailed graph of the overall control architecture for a single DER, applying primary economic droop controller Equation (19), adaptive controller Equation (21) for CGs, Equation (23) for RGs, Equation (25) for the storage, primary voltage droop controller Equation (30), DSFC Equation (27) and DSVC Equation (31), is shown in
Figure 2.
In a distributed sparse communication network, each DCr only interacts with information from adjacent DCrs, so high reliability can be achieved, as a dominant DCr is not necessary. Taking DER i for an example, DCr i sends its relevant information (,,,) to its neighbor’s DCr j as well as receiving the relevant information (,,,) from adjacent DCr j, and then the distributed strategy is applied to complete the goal of frequency recovery, voltage regulation, and the regulation of the cost coefficient, , when the power bounds or capacity constraints, only for the storage, arrive.
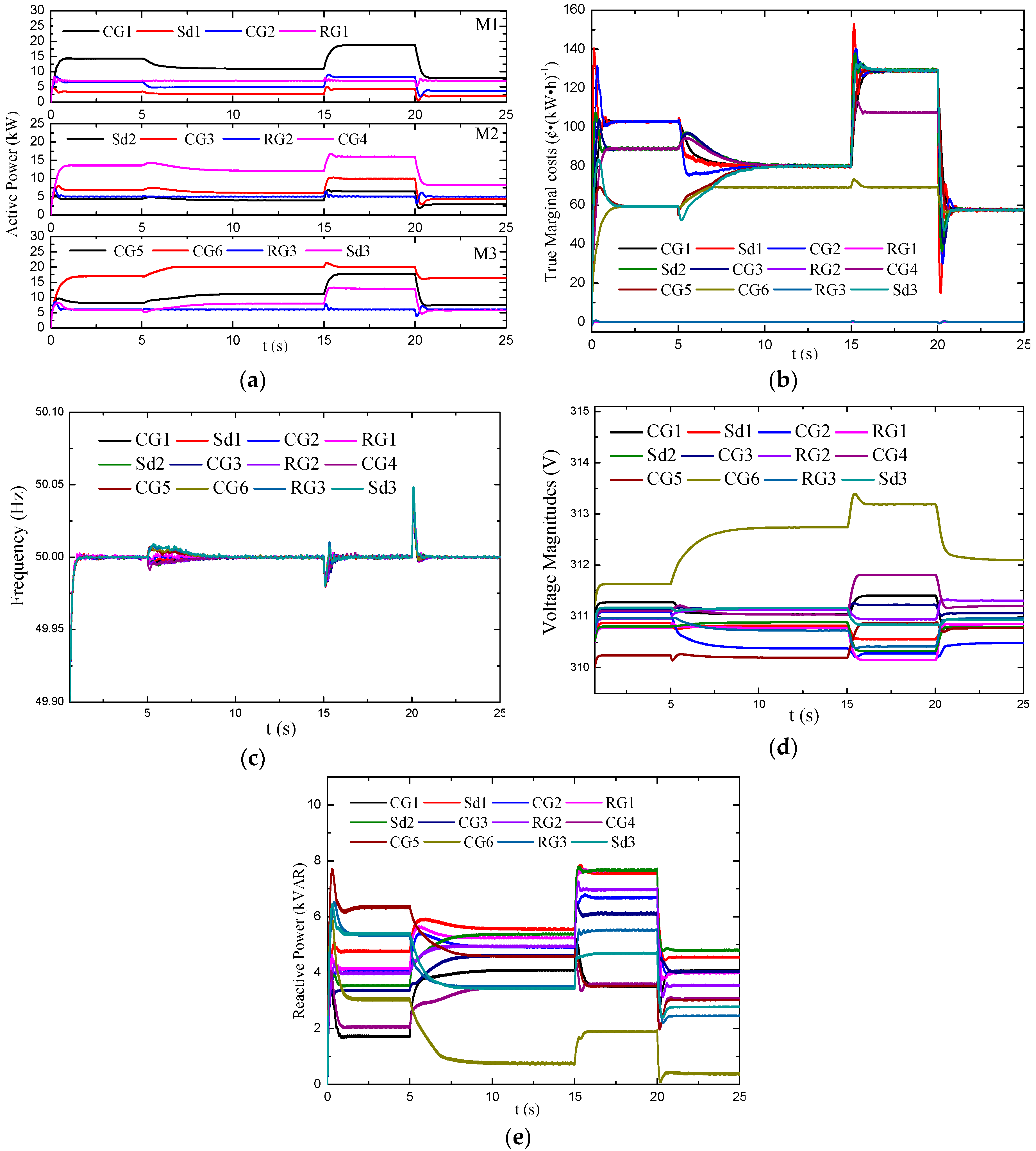
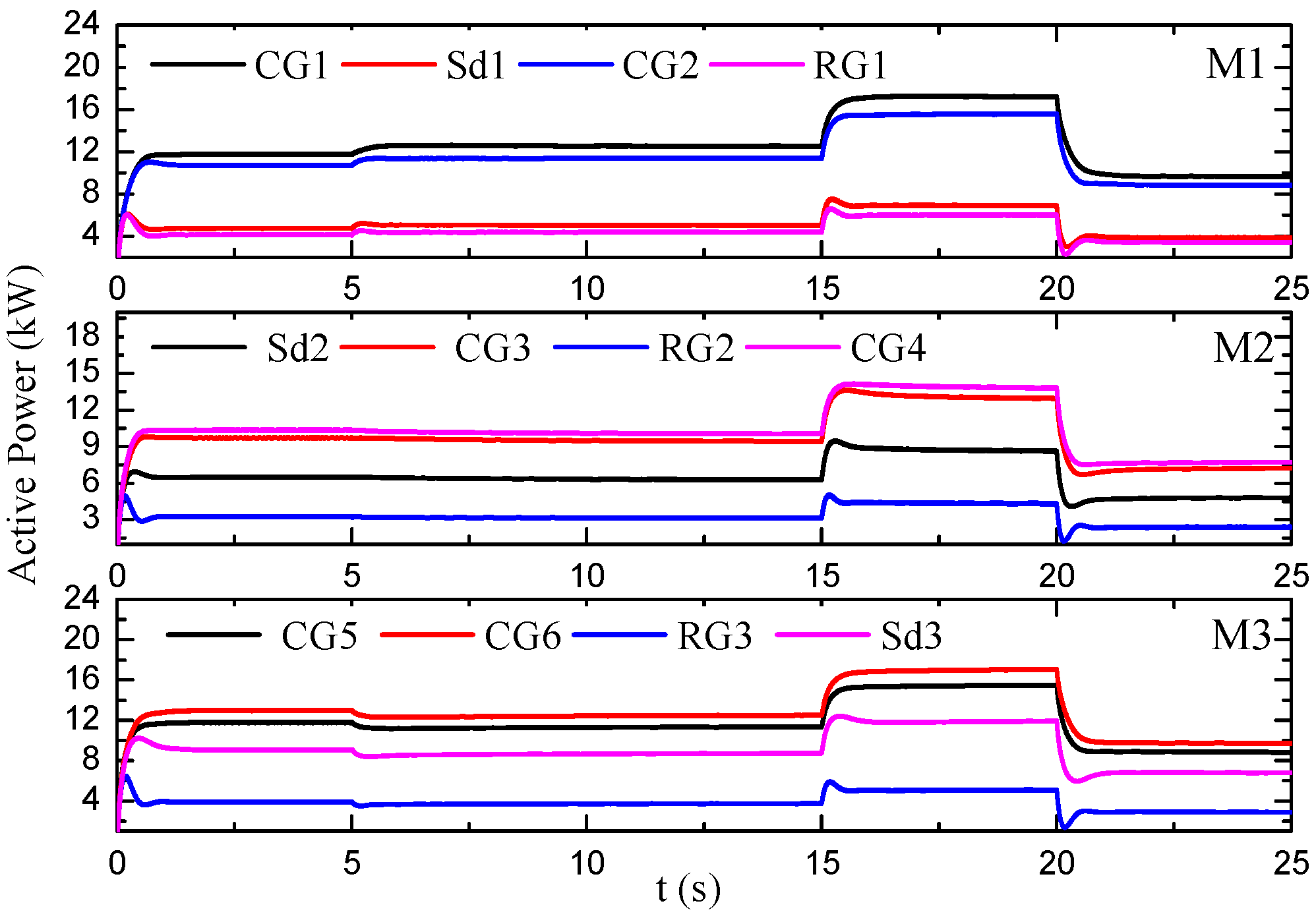
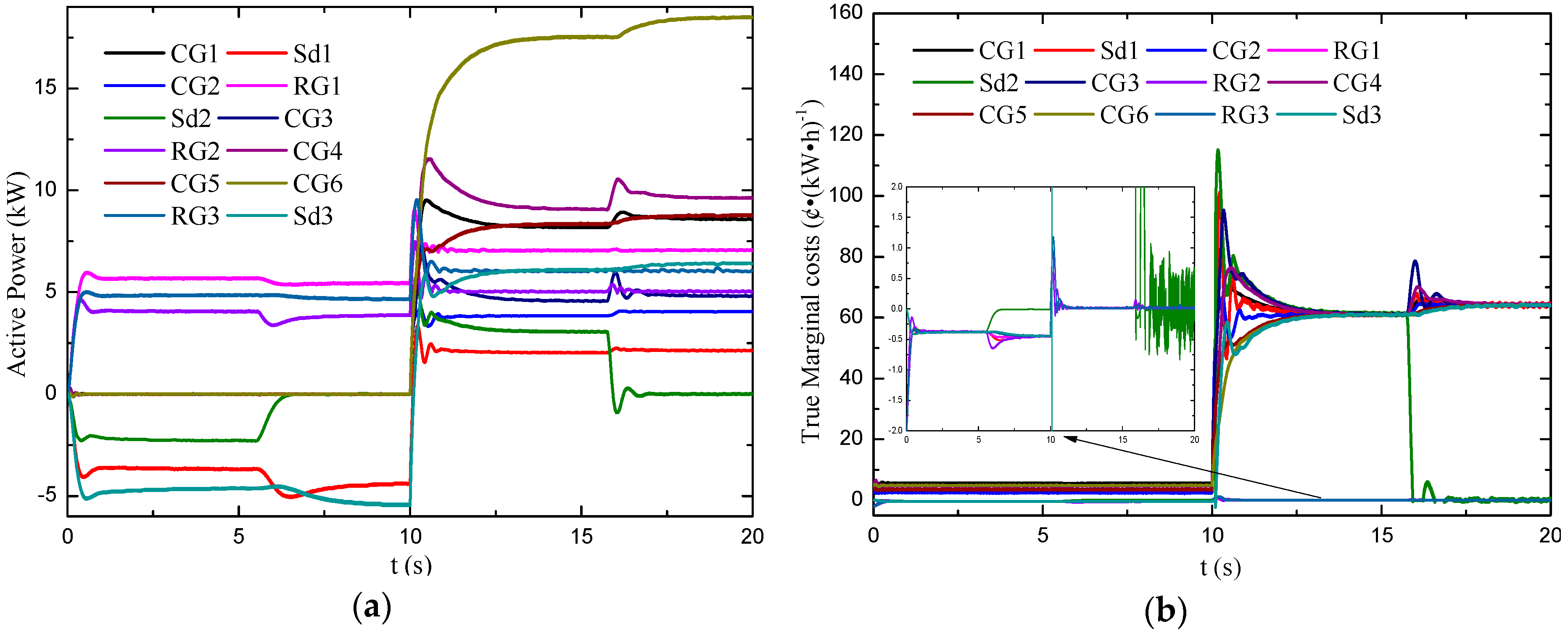
The proposed distributed strategy can successfully realize the transition between autonomous mode and collective mode, as listed in Equation (18). Autonomously, the power is distributed by identical TMC inside sub-microgrids; Collectively, the generation costs of the whole MGC can be effectively lowered by considering line loss to realize LLMC same. Moreover, the system frequency can be restored to the rating, and node voltage magnitudes can be regulated near to the nominal value.
7. Conclusions
Aimed at the higher operating expenses of MGC brought by the traditional droop control, this paper proposed a distributed economic strategy to lower the whole operating costs. A consensus-based adaptive controller was proposed, to deal with power limits of DERs. In particular, for storage devices, capacity constraints were also included. The renewable generators were modeled to minimize the curtailment, and the storage was modeled to charge or discharge, according to different load conditions. Moreover, the distributed secondary control was used to restore the system frequency and voltage magnitudes of DERs. In addition, the whole design was able to achieve the transition between autonomous mode and collective mode, and line loss was considered, to further lower the expenses in collective mode. More importantly, the proposed strategy does not need the central controller, and has a high reliability, only using sparse communication network among neighbors.
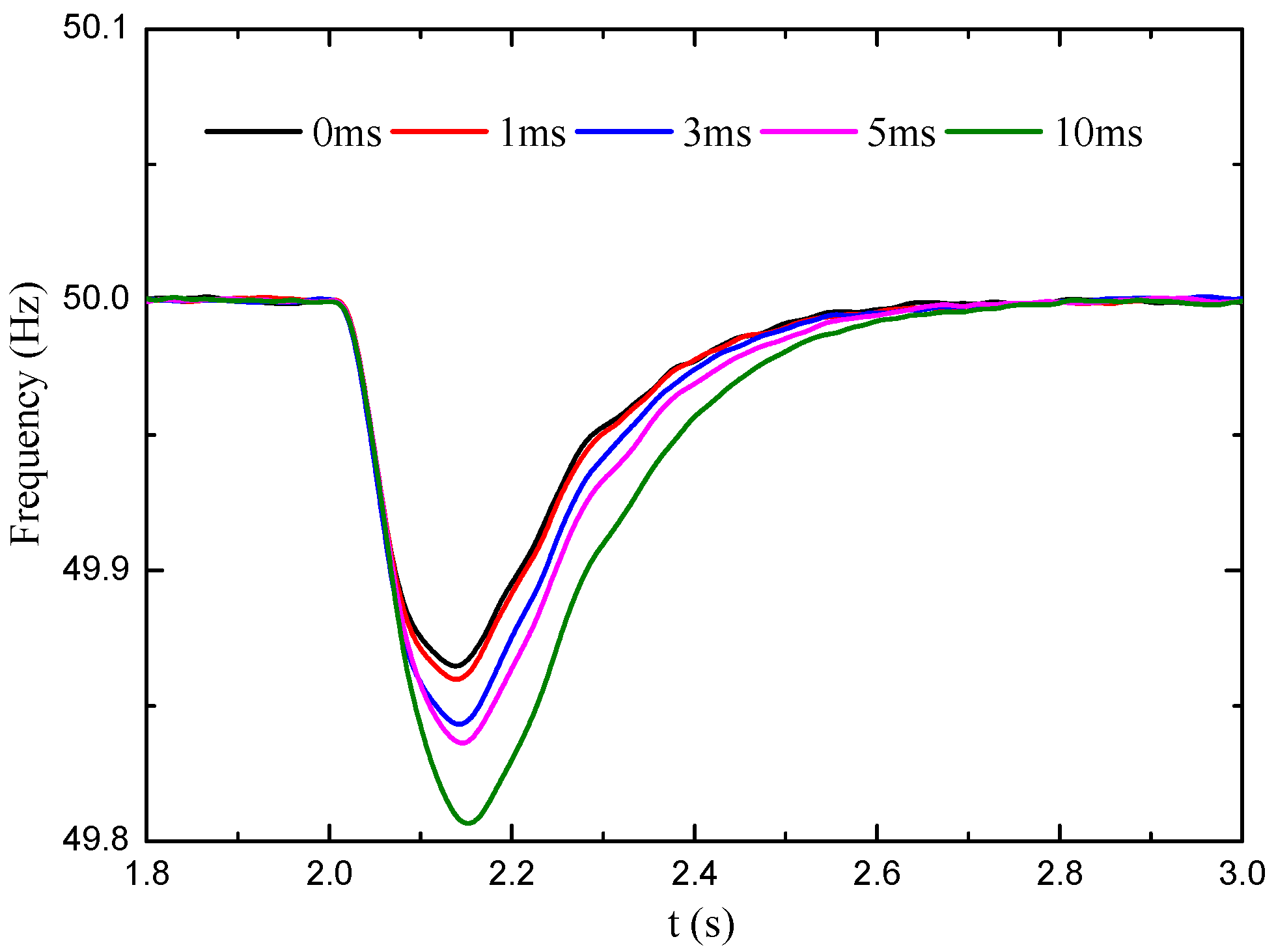
However, the communication delay can affect the transient performance of the whole design (i.e., overshoot); therefore, determining how to lower the effect of communication delays is necessary in the future.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}