Torque Coordination Control during Braking Mode Switch for a Plug-in Hybrid Electric Vehicle

Abstract
:1. Introduction
2. HEV Structure and Dynamic Model
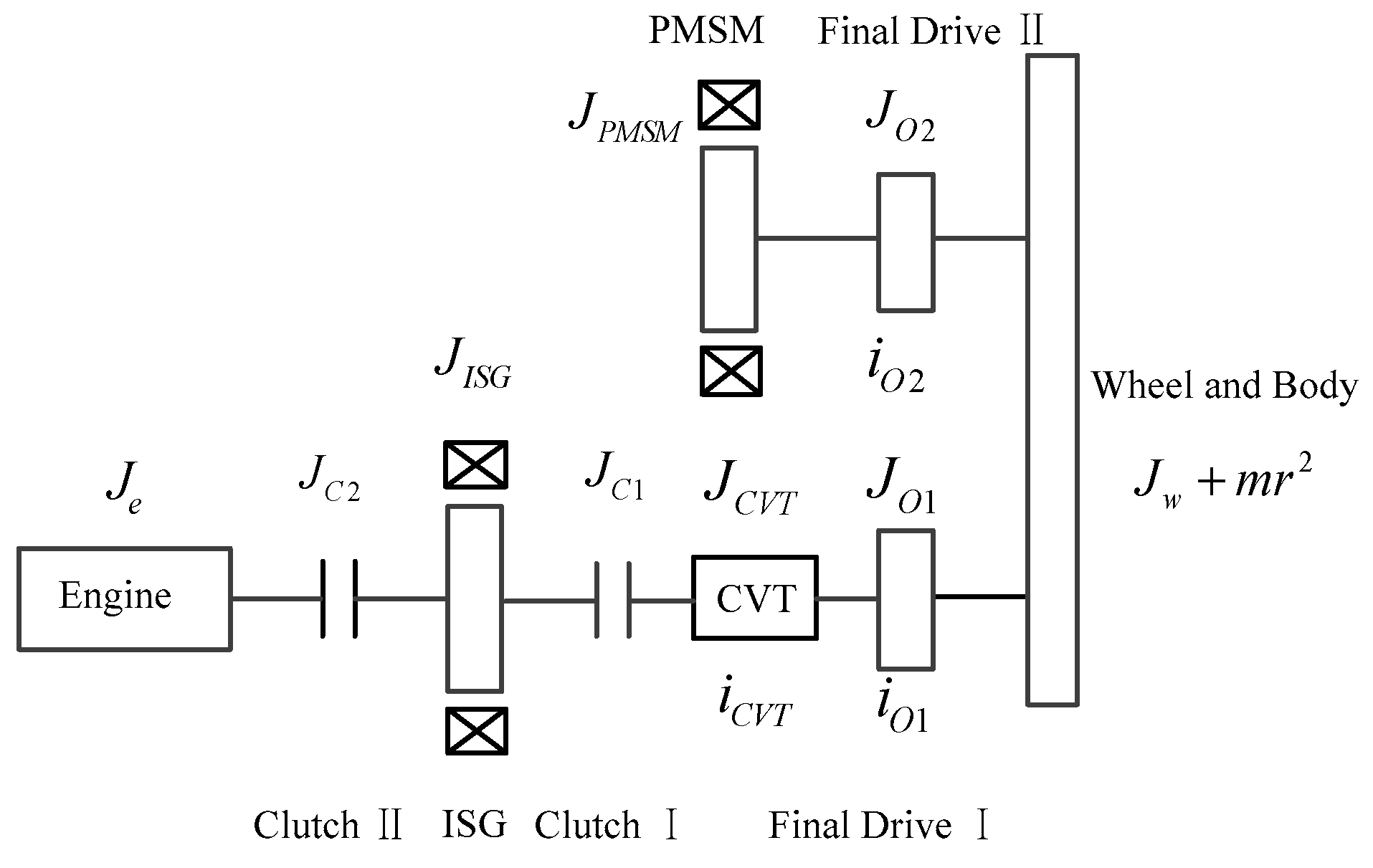
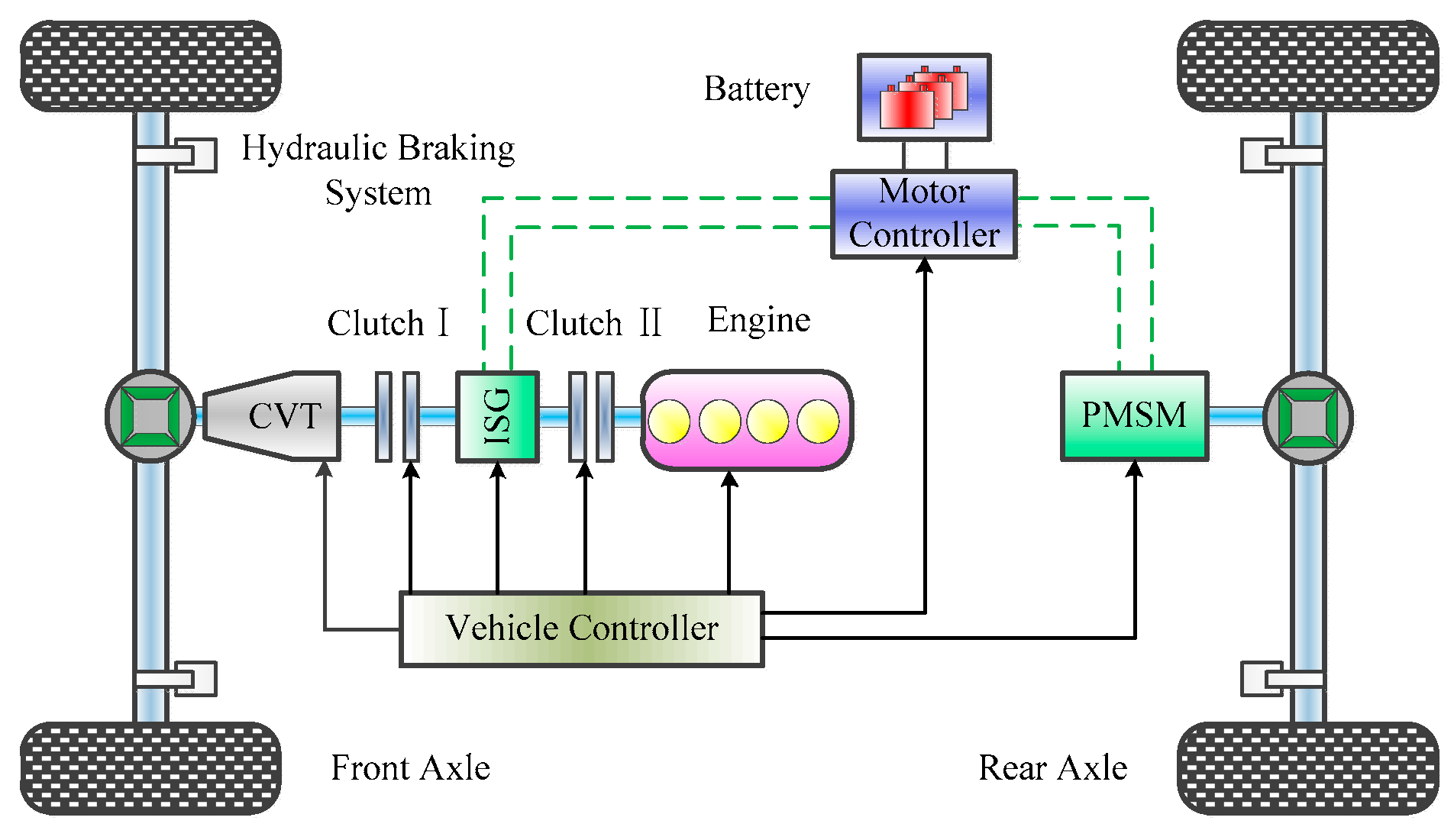
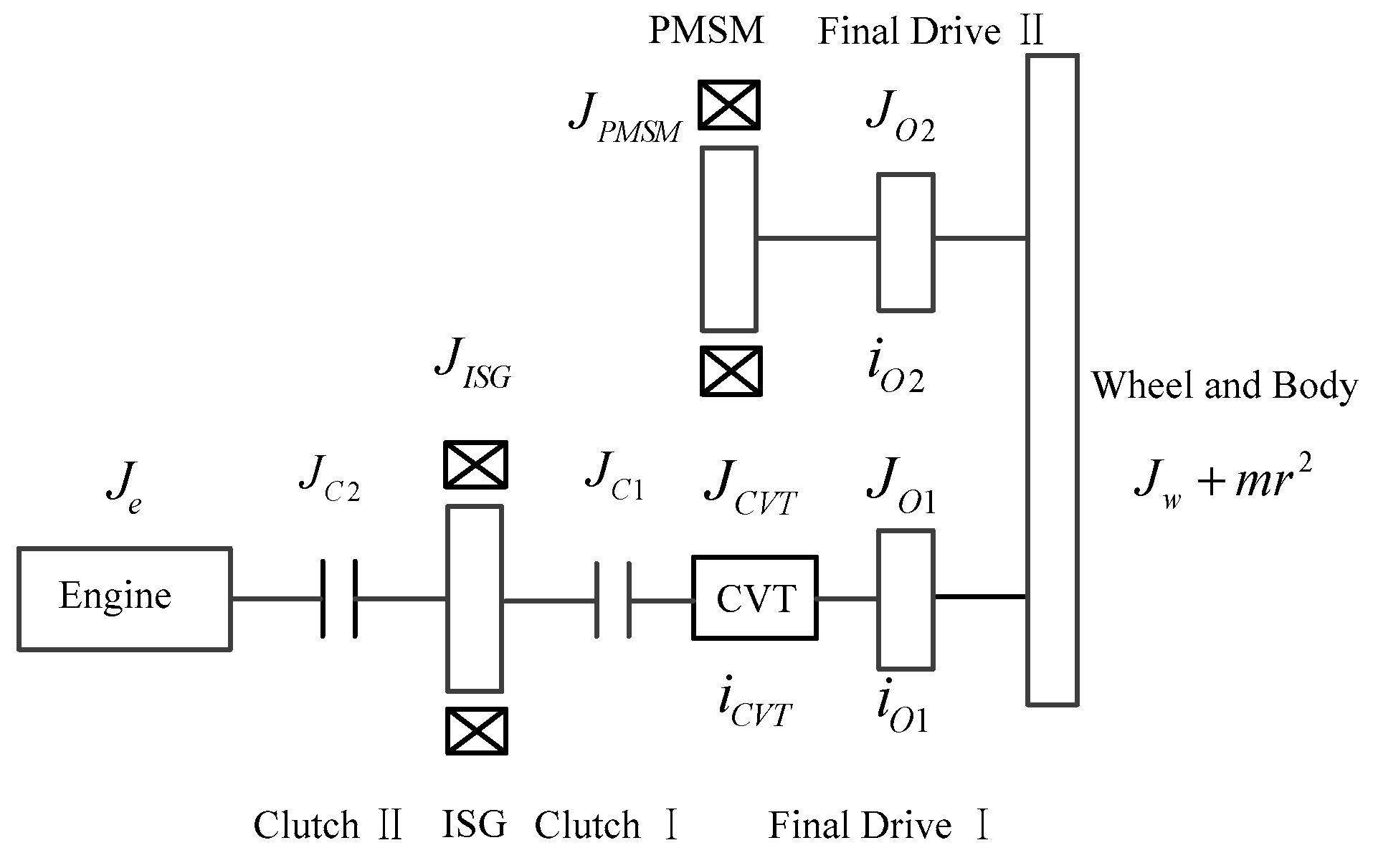
2.1. HEV Structure
2.2. Dynamic Model
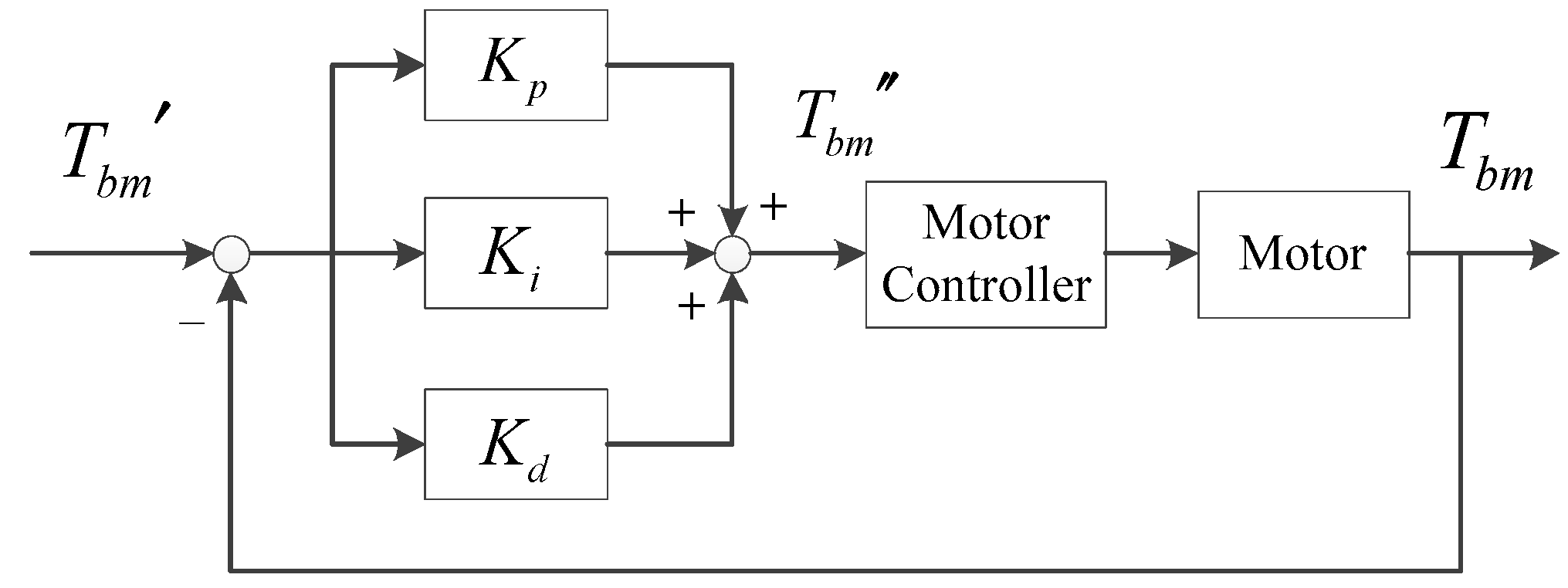
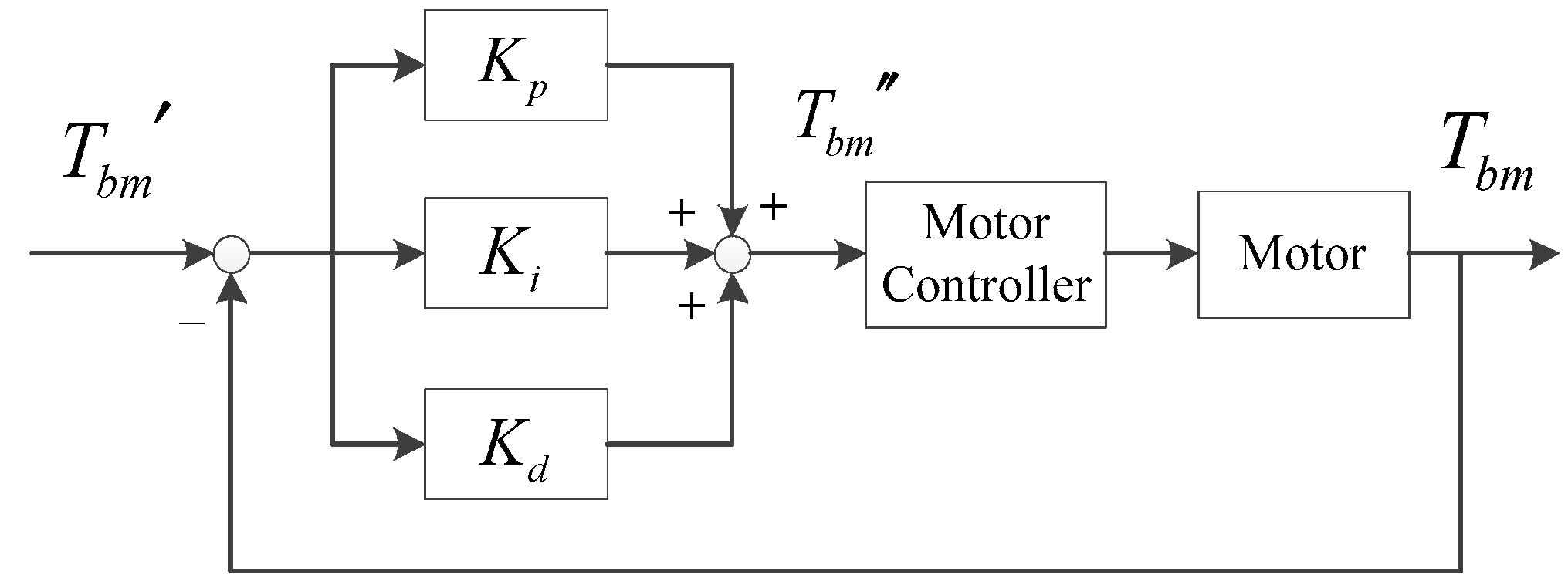
2.2.1. Motor Dynamic Model
2.2.2. Hydraulic Dynamic Model
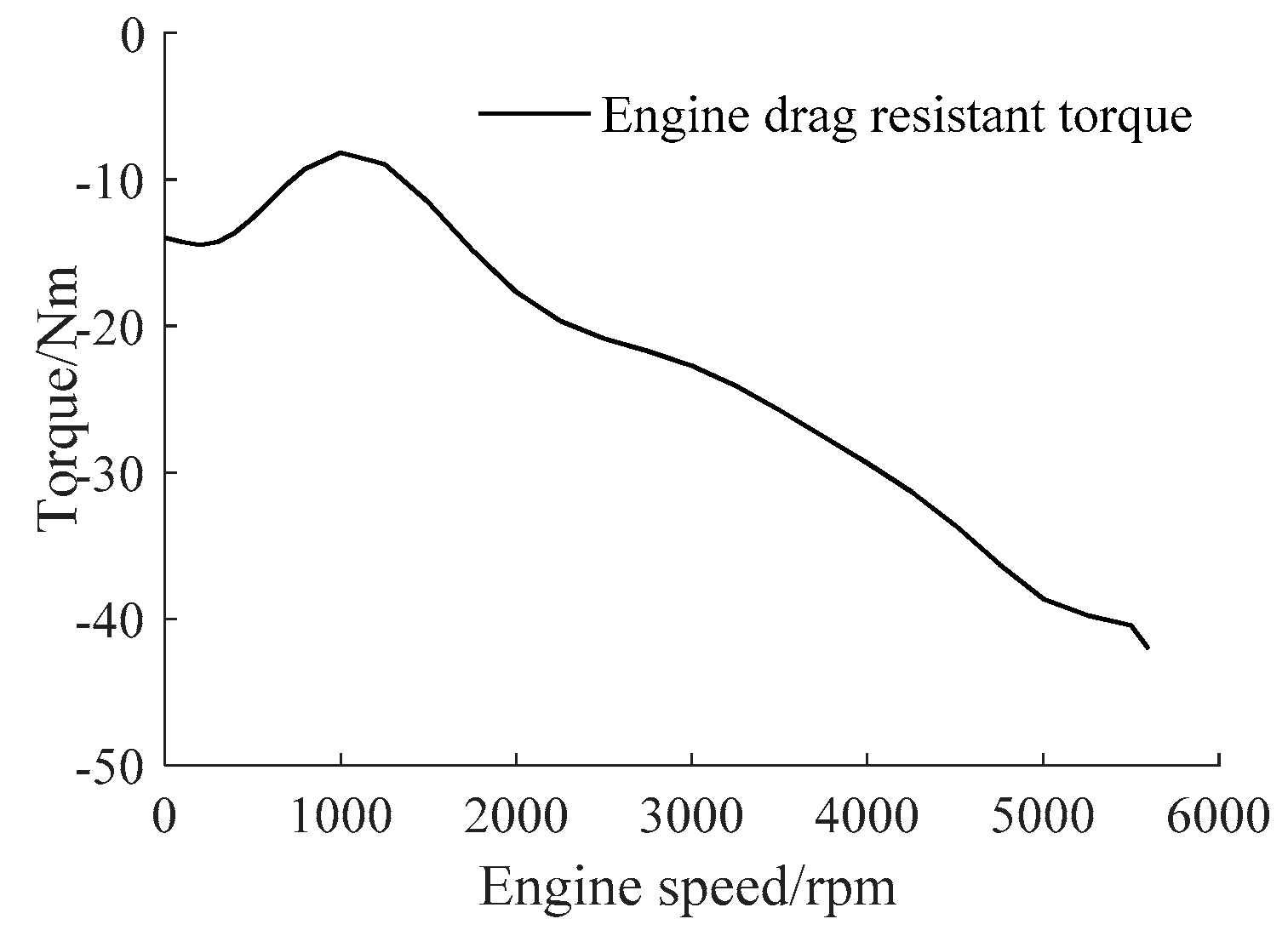
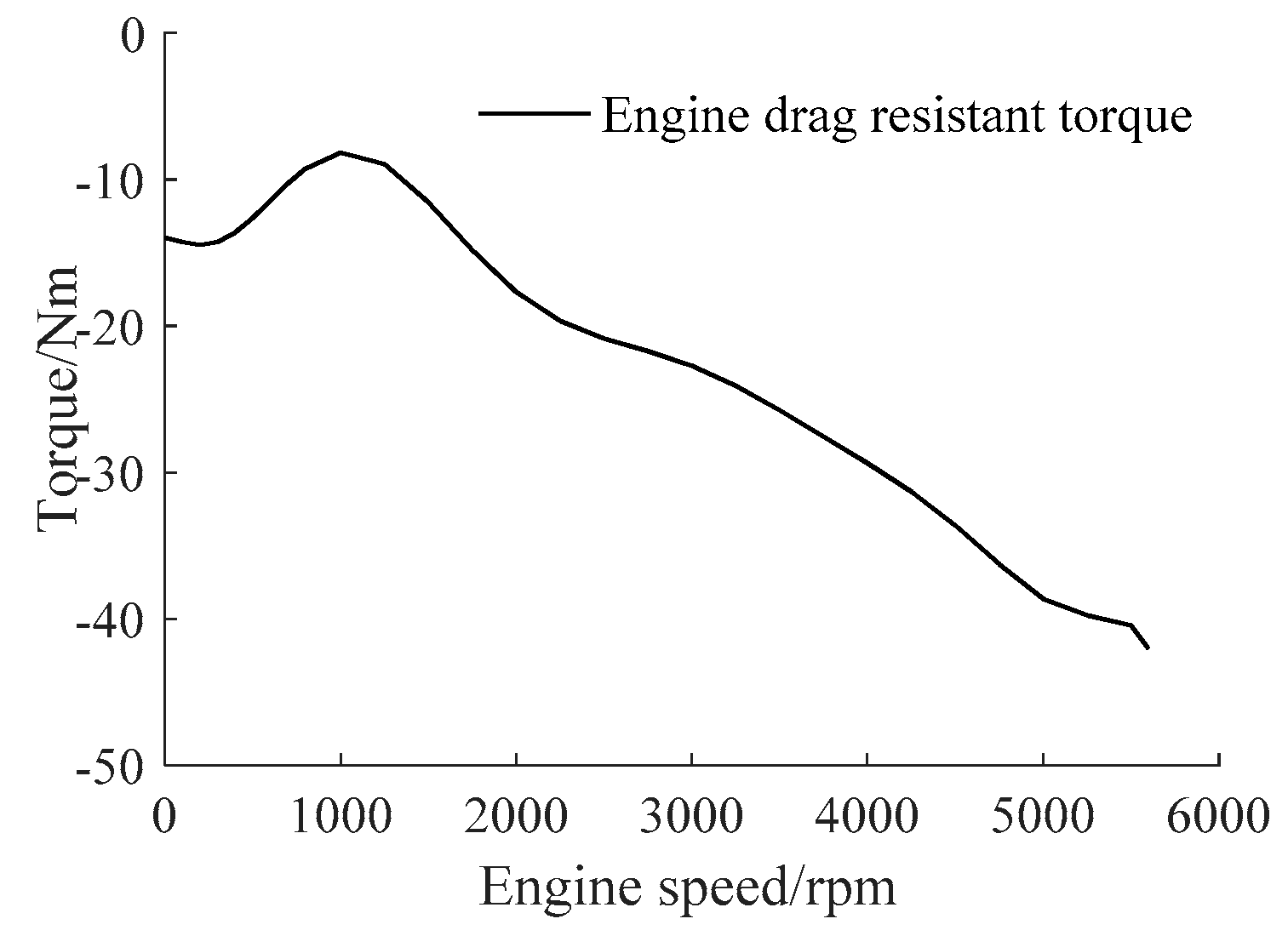
2.2.3. Engine Drag Model
3. Braking Force Distribution Strategy
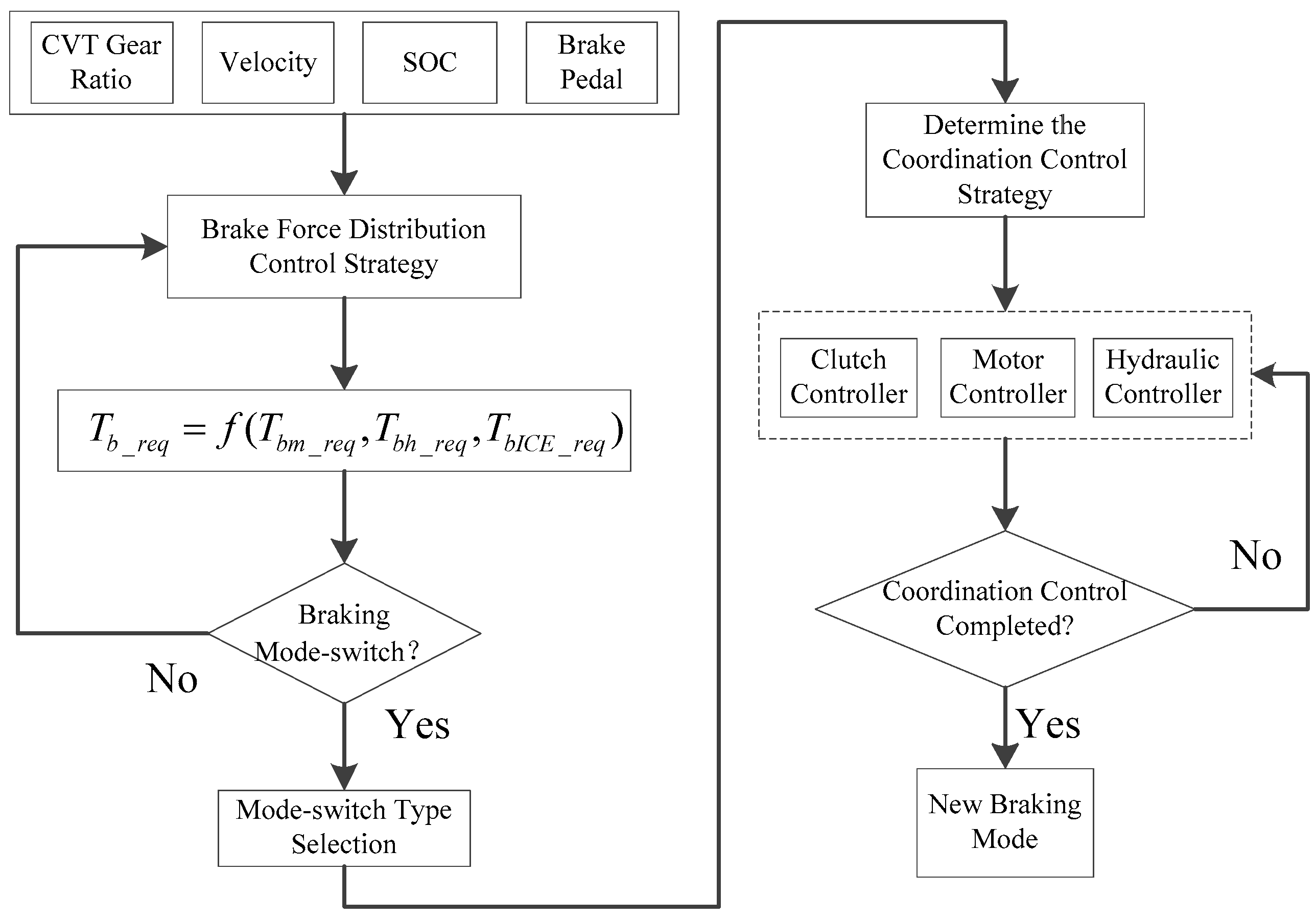
4. Coordinated Control Strategy for Braking Mode Switch
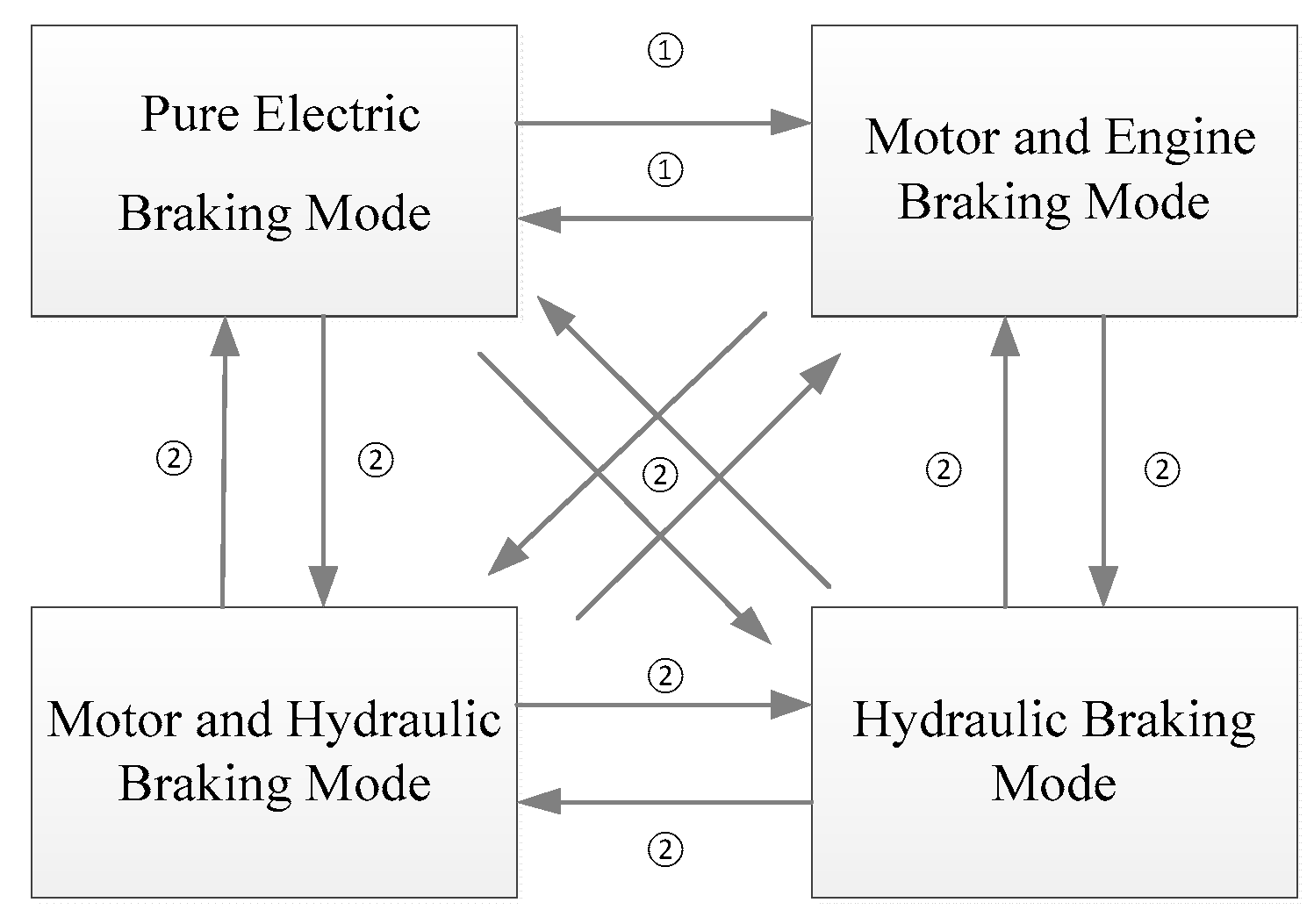
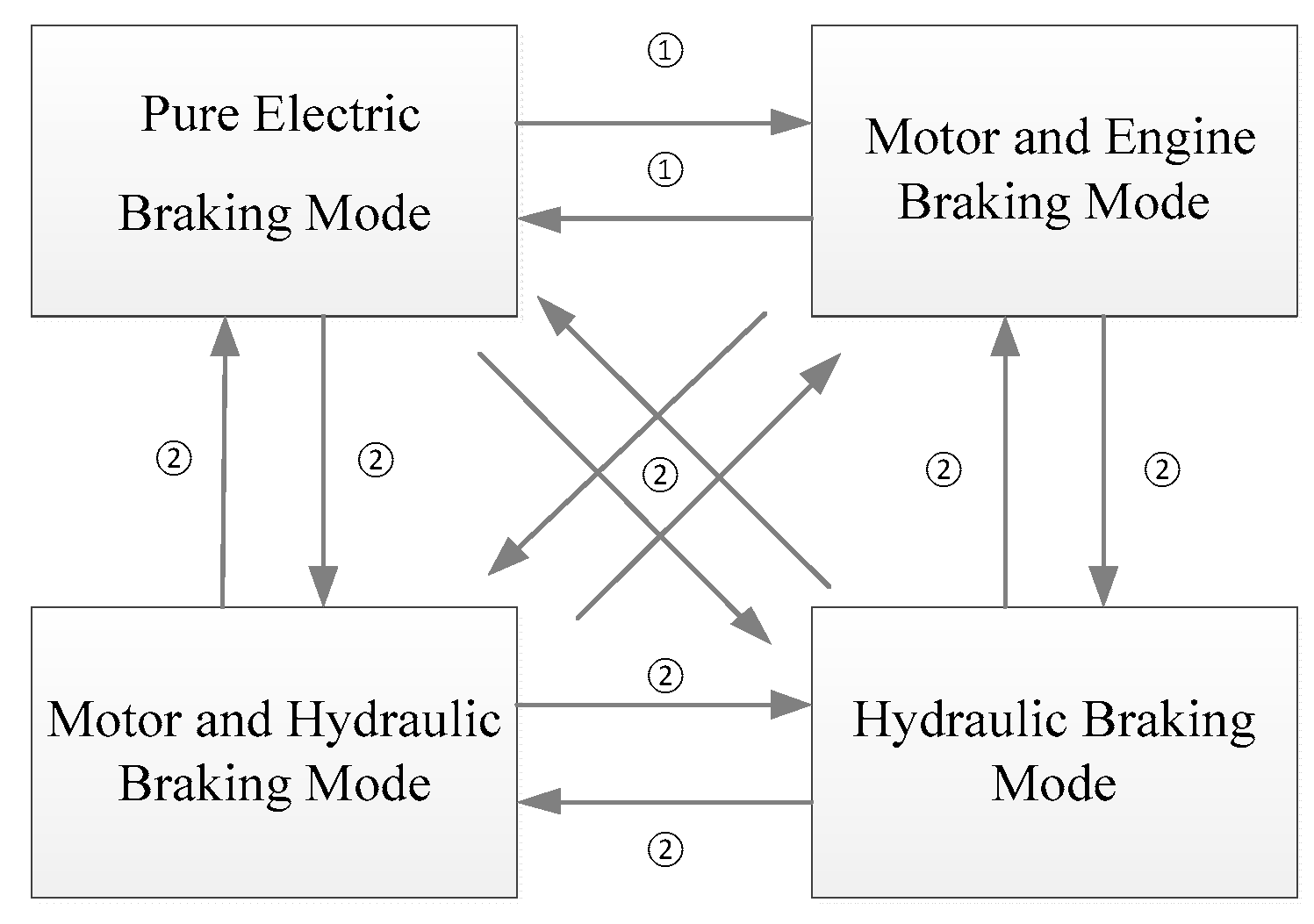
4.1. Kinetics Analysis of Braking Mode
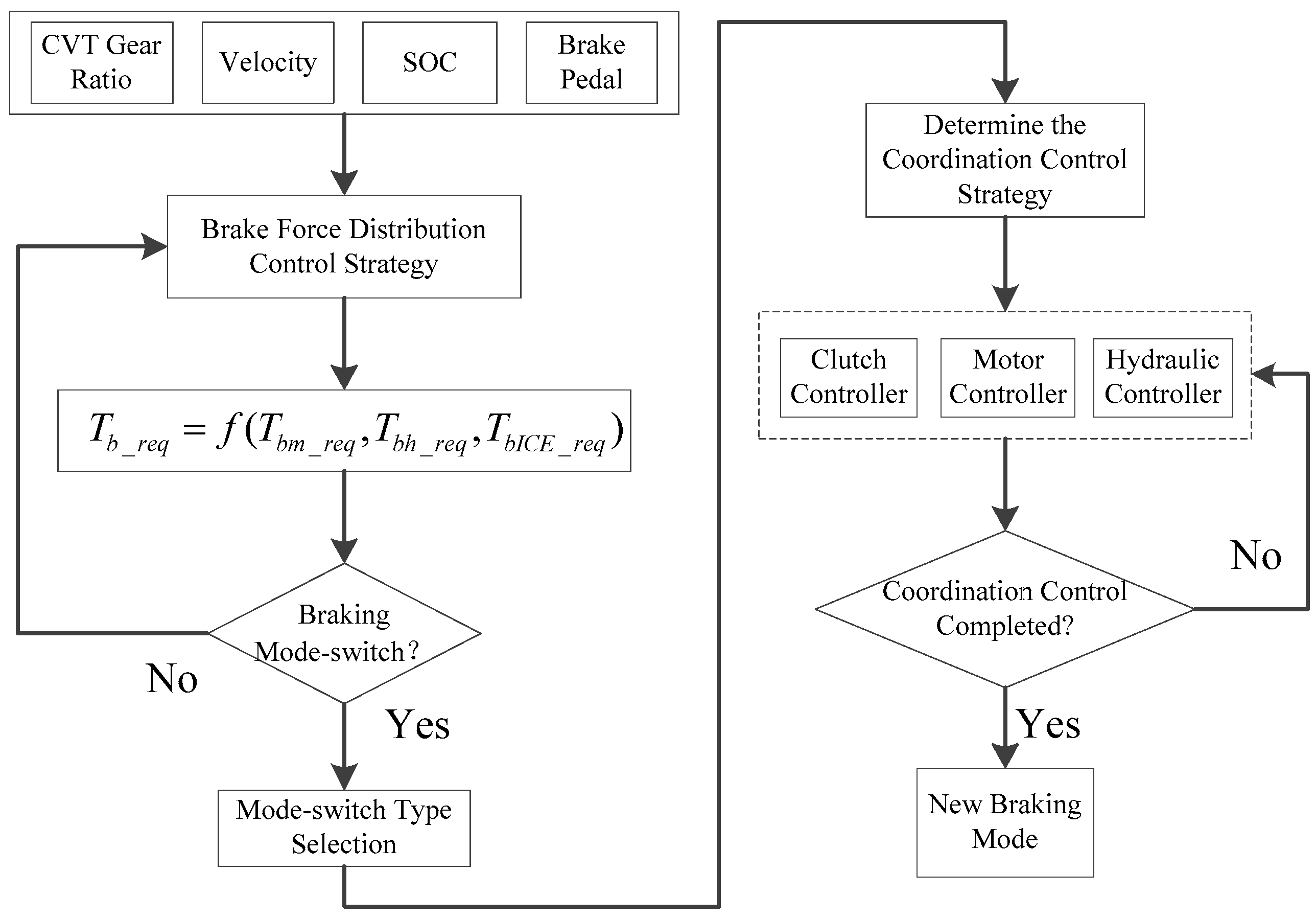
4.2. Coordination Control Strategy for Mode Switch
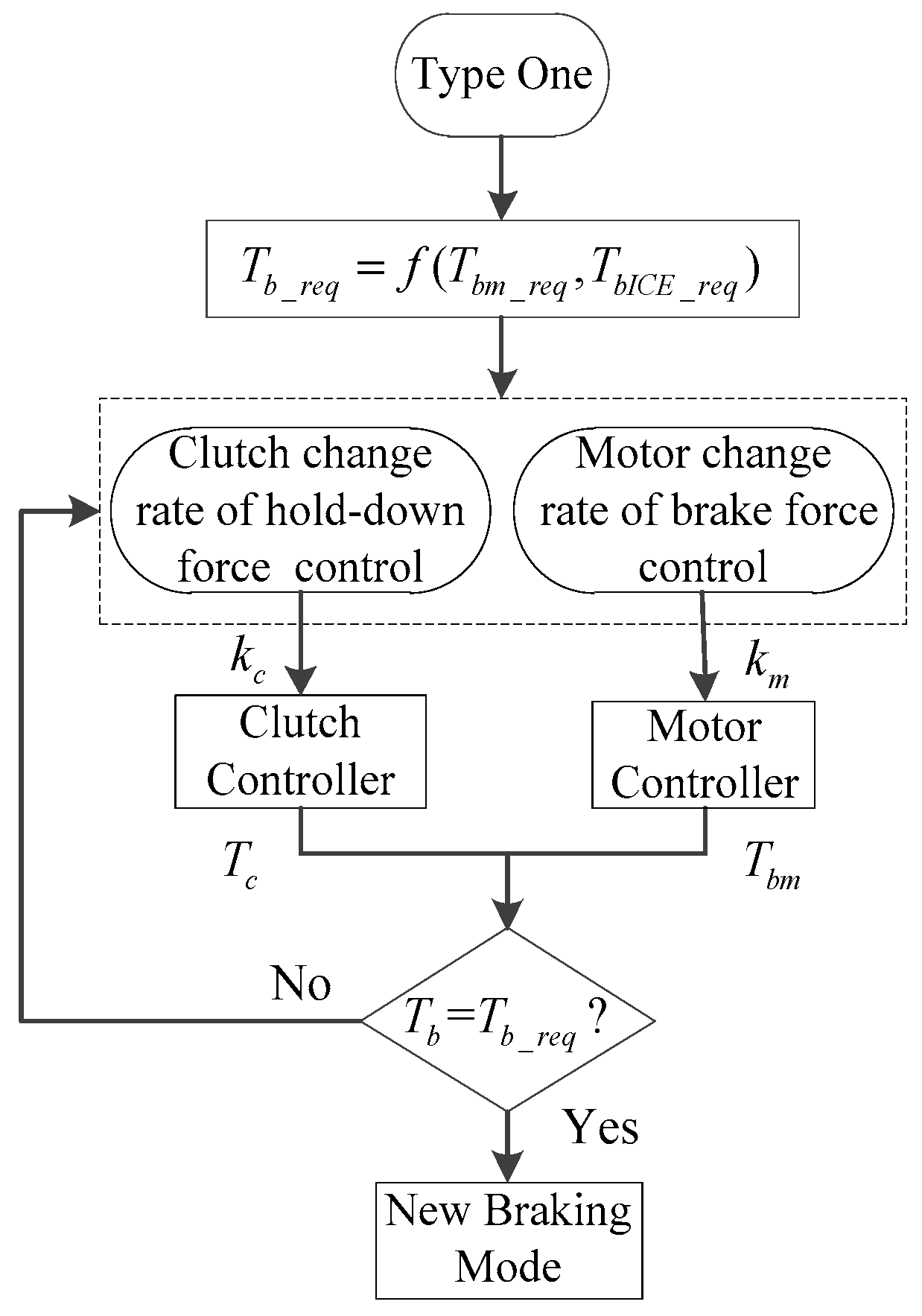
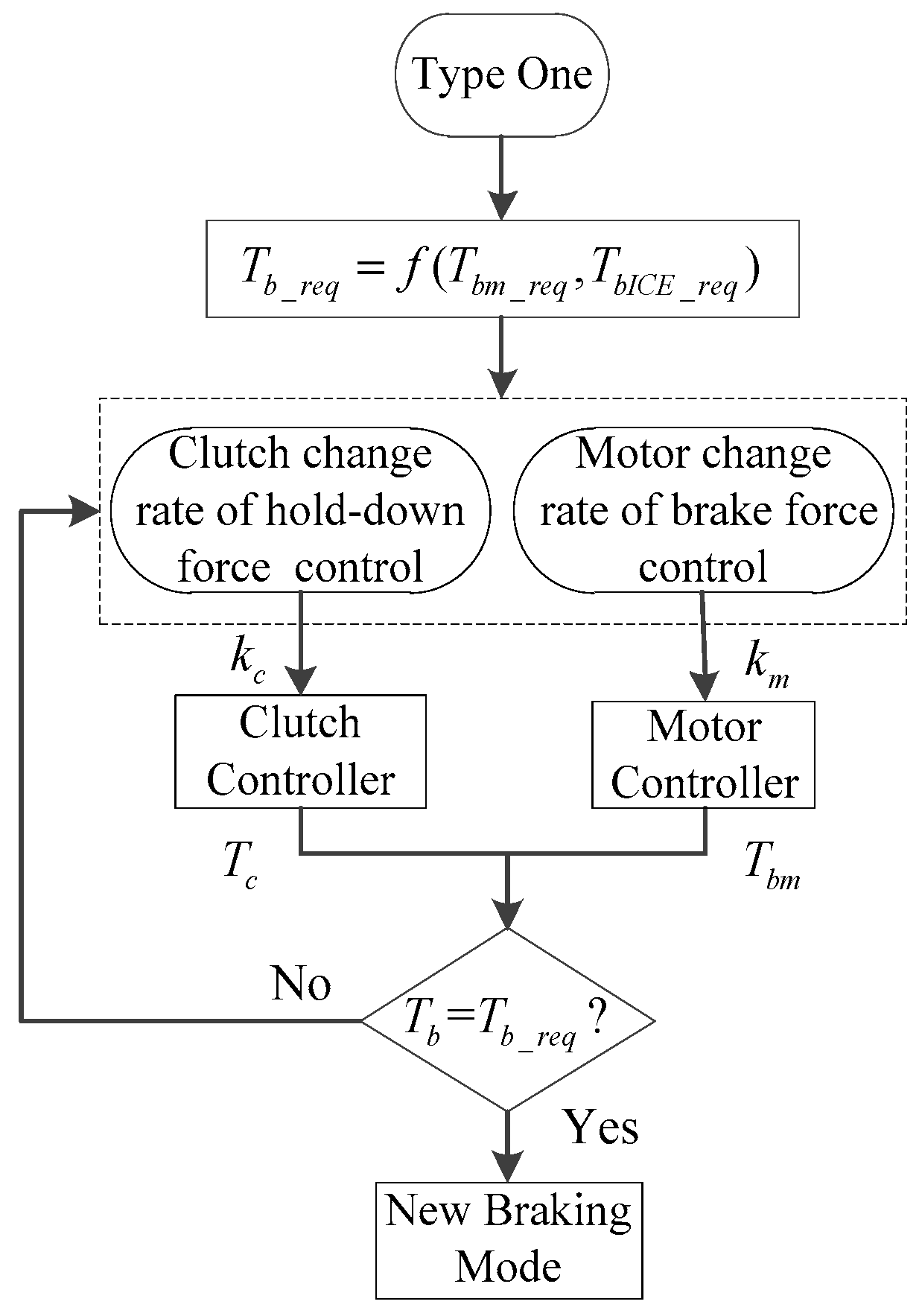
4.2.1. Coordination Control Strategy of Type One
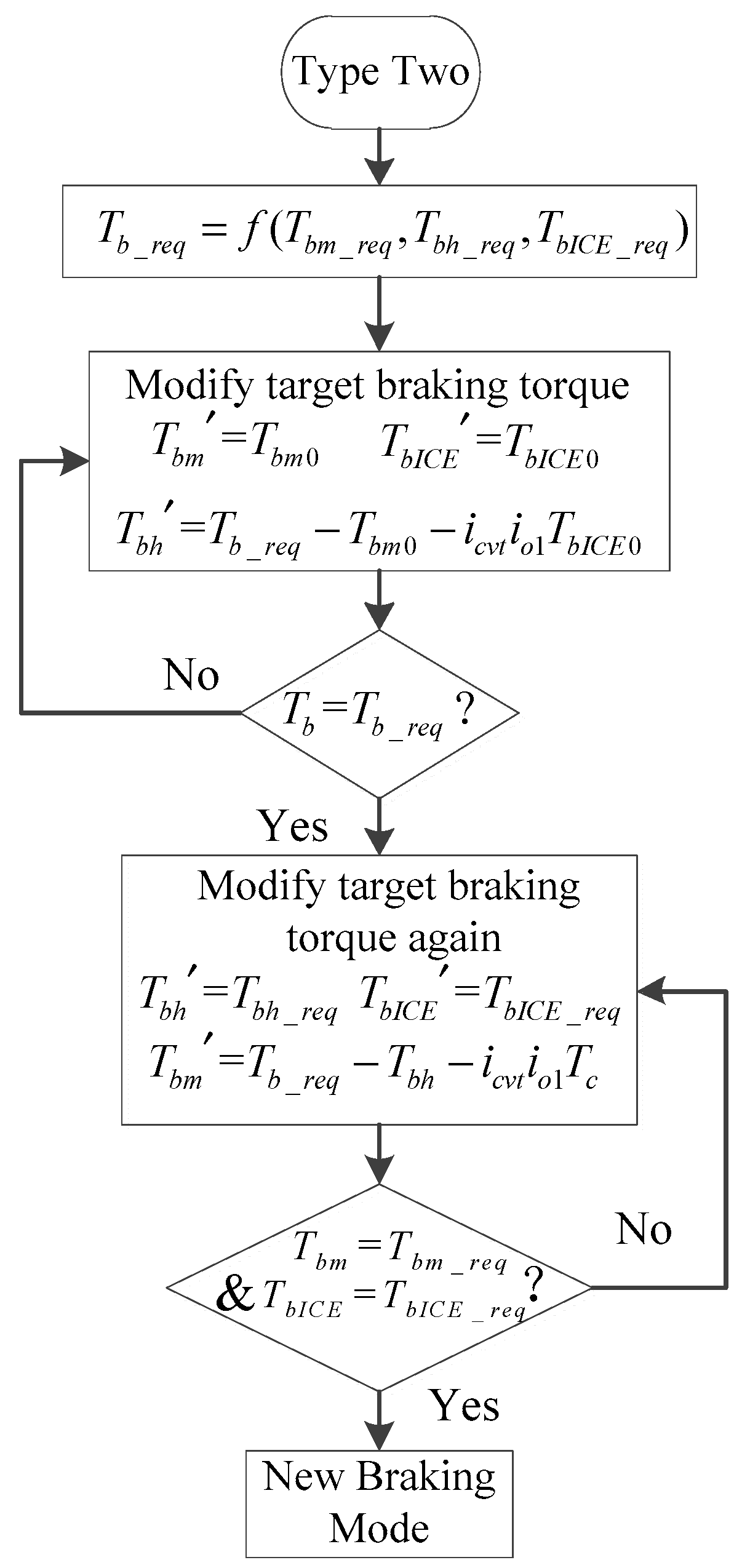
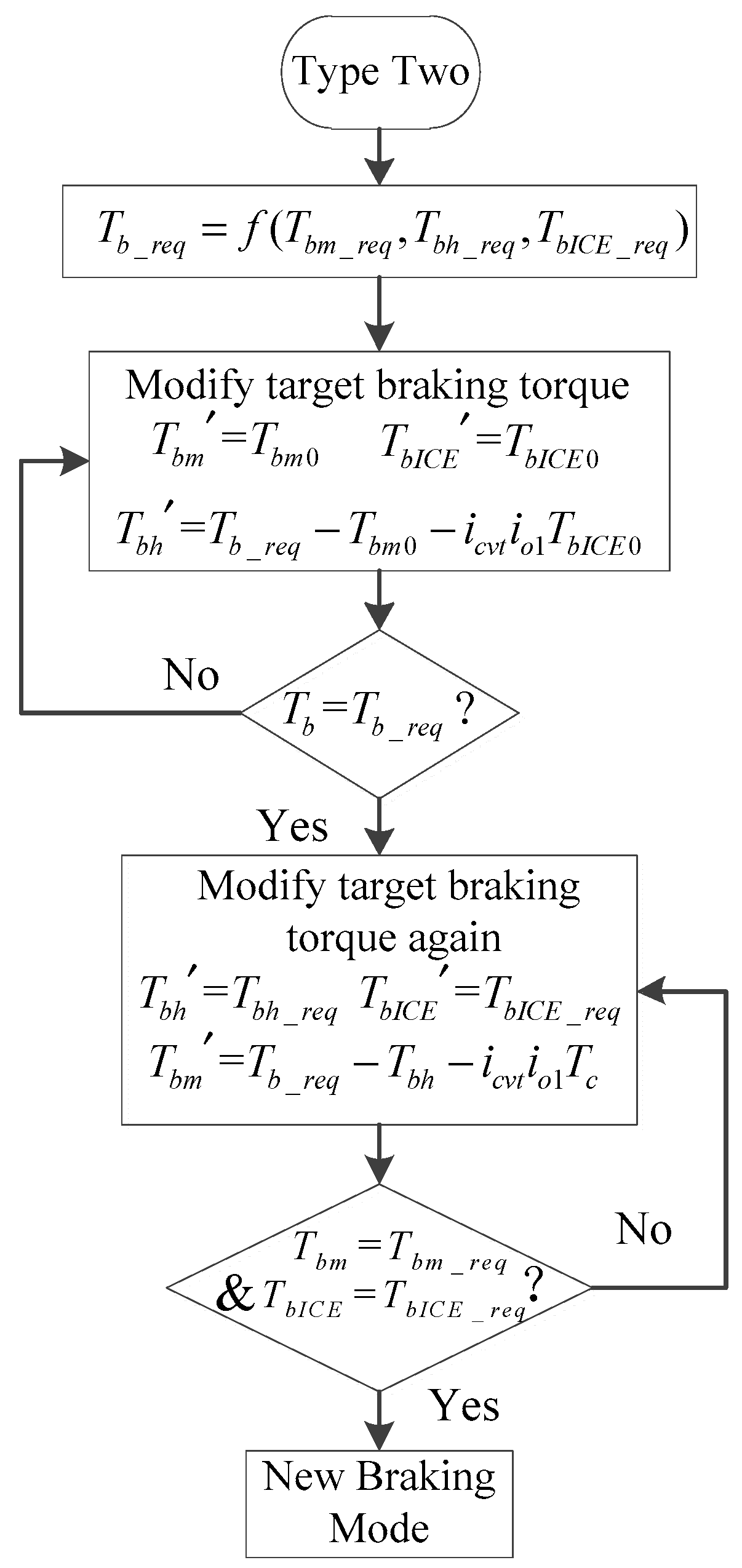
4.2.2. Coordination Control Strategy of Type Two
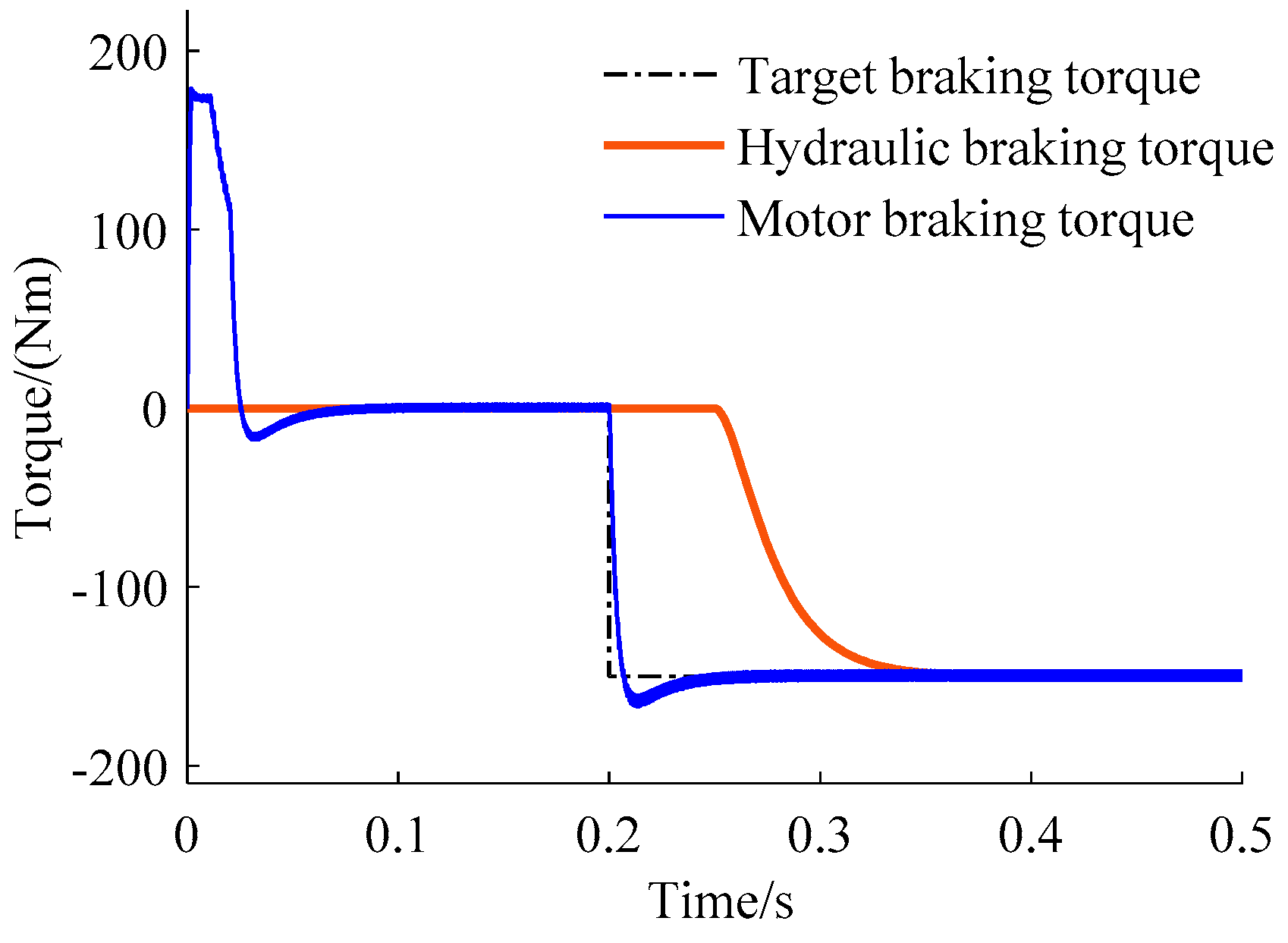
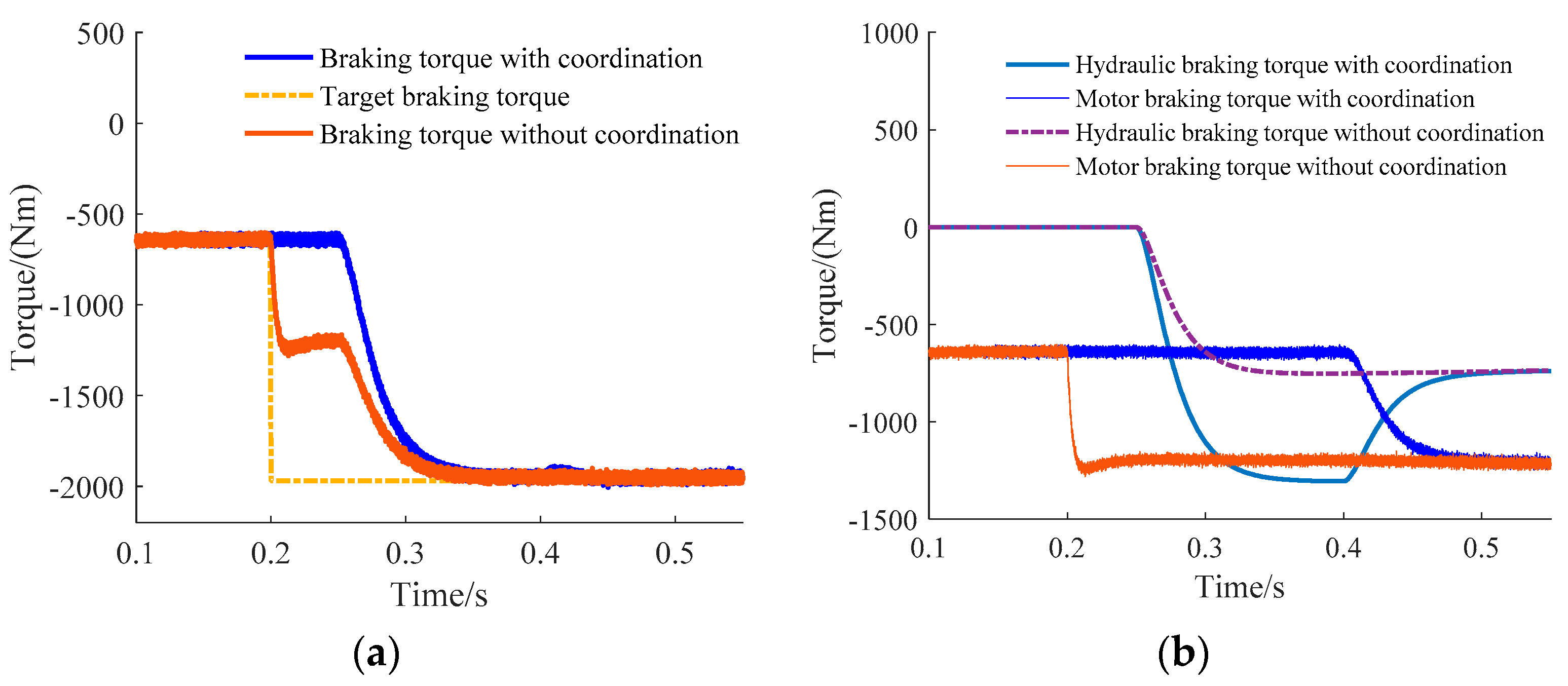
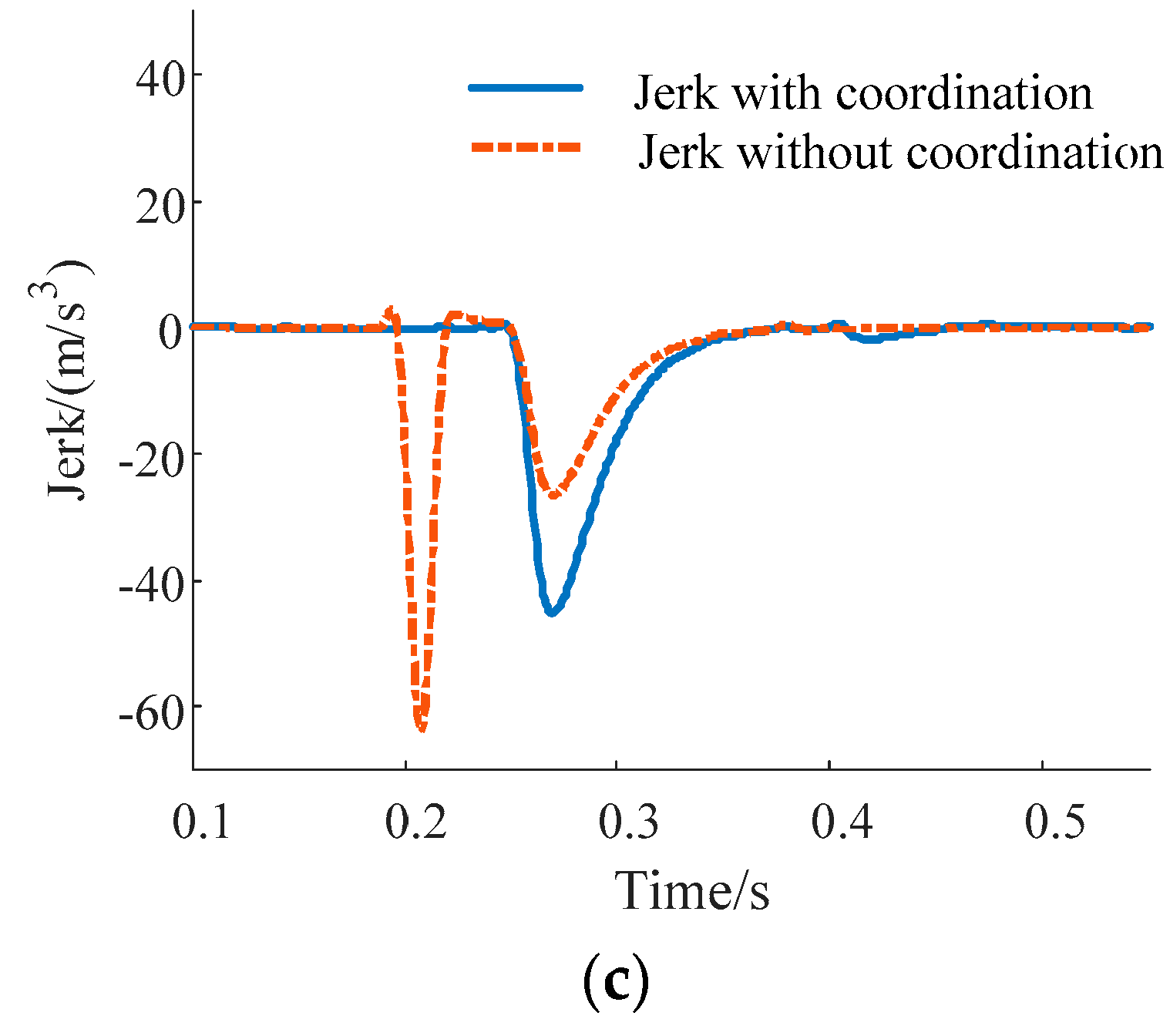
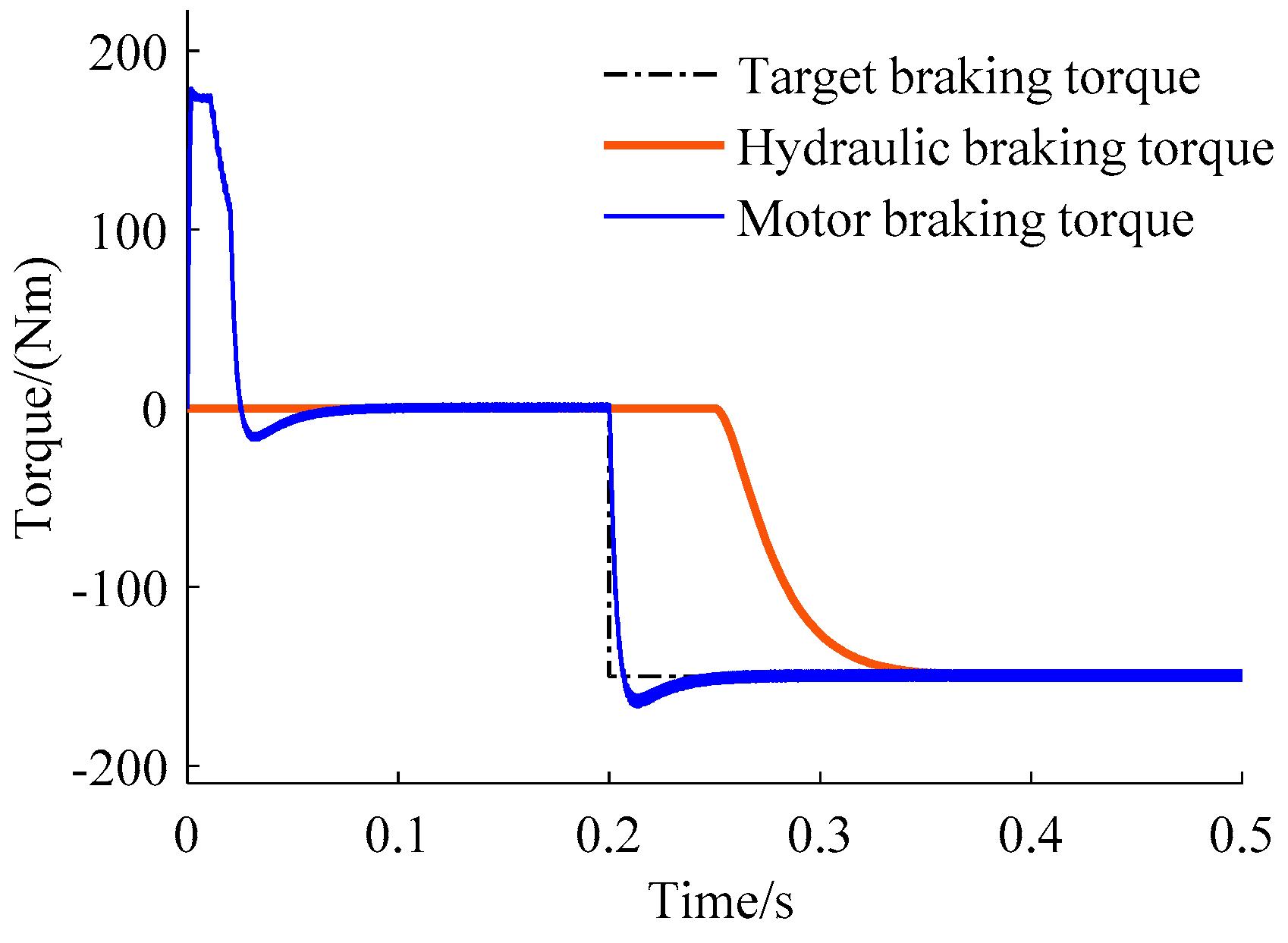
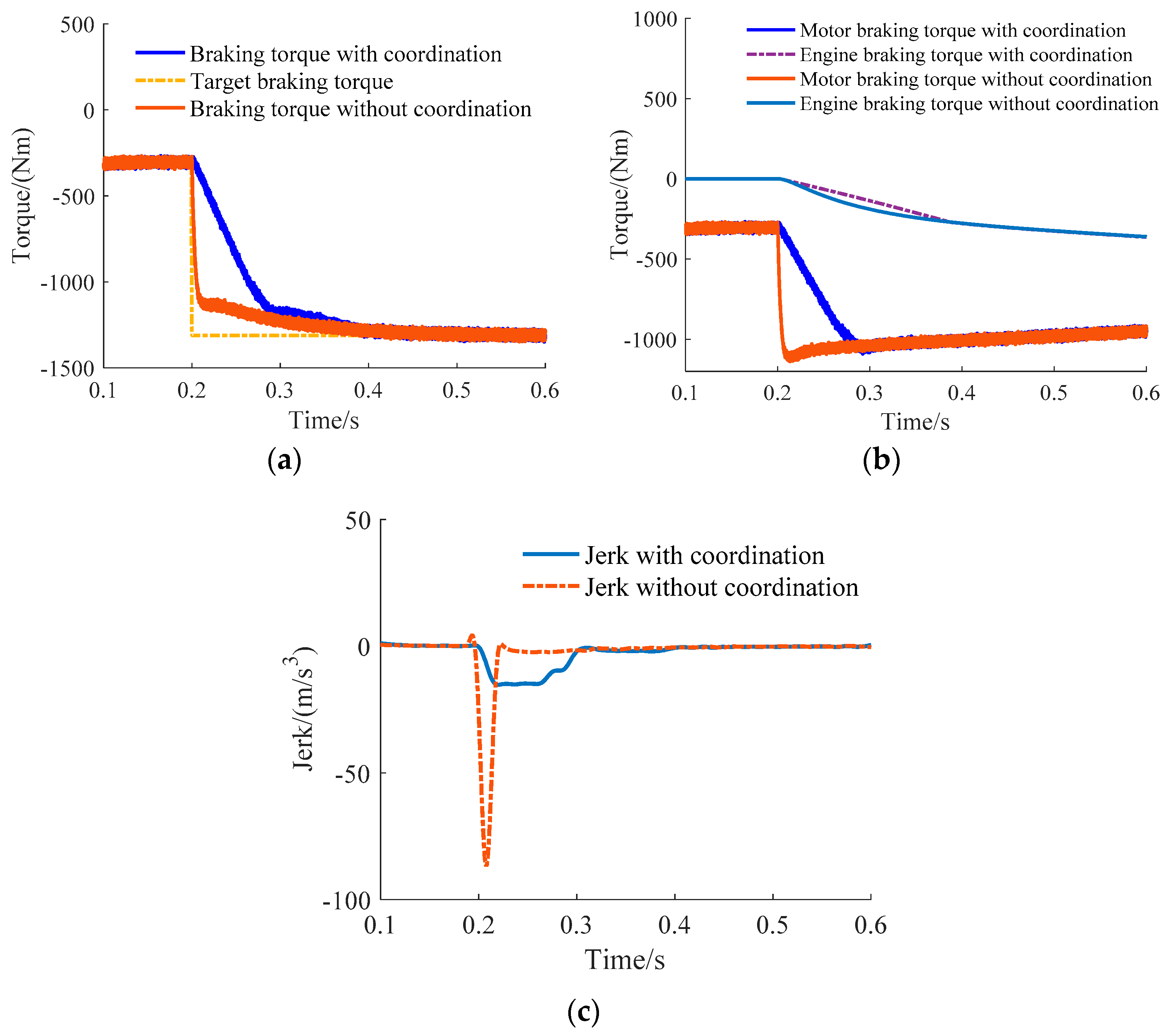
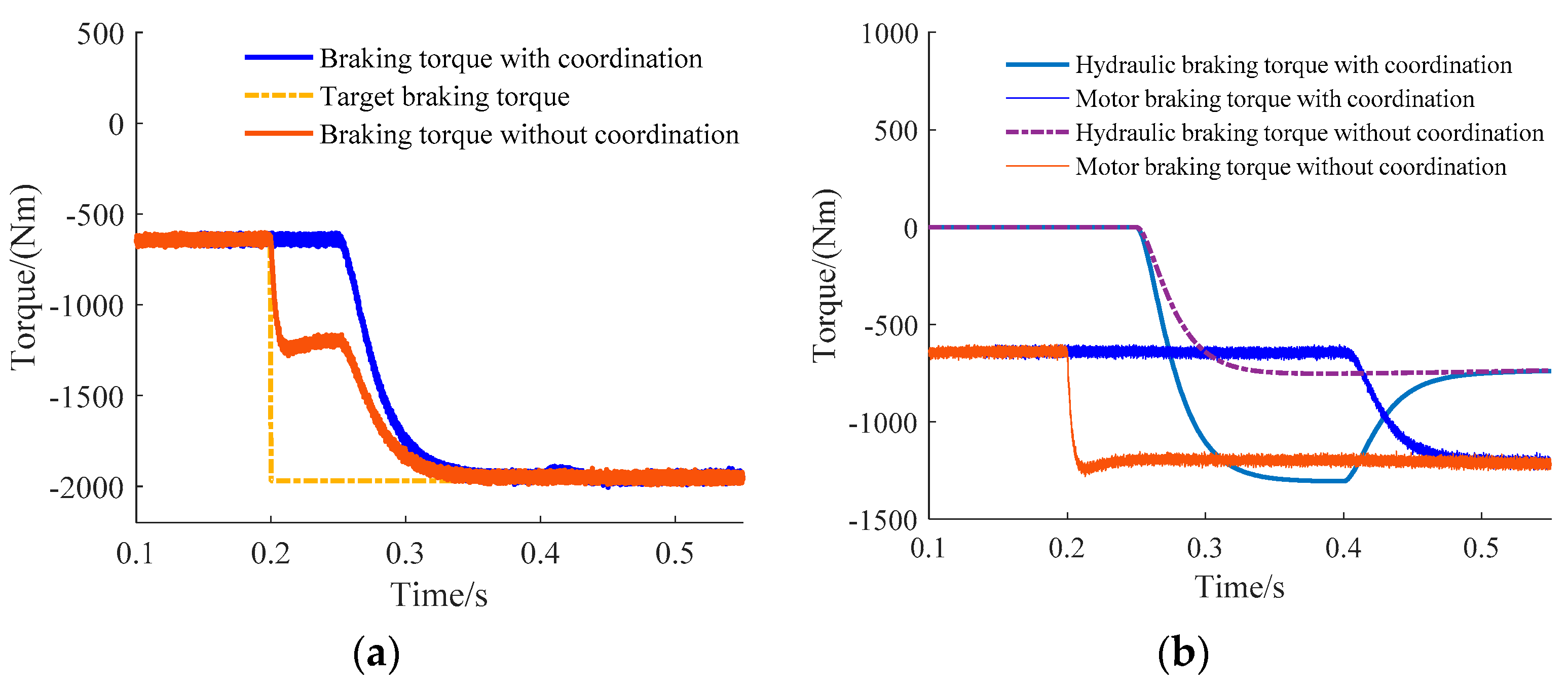
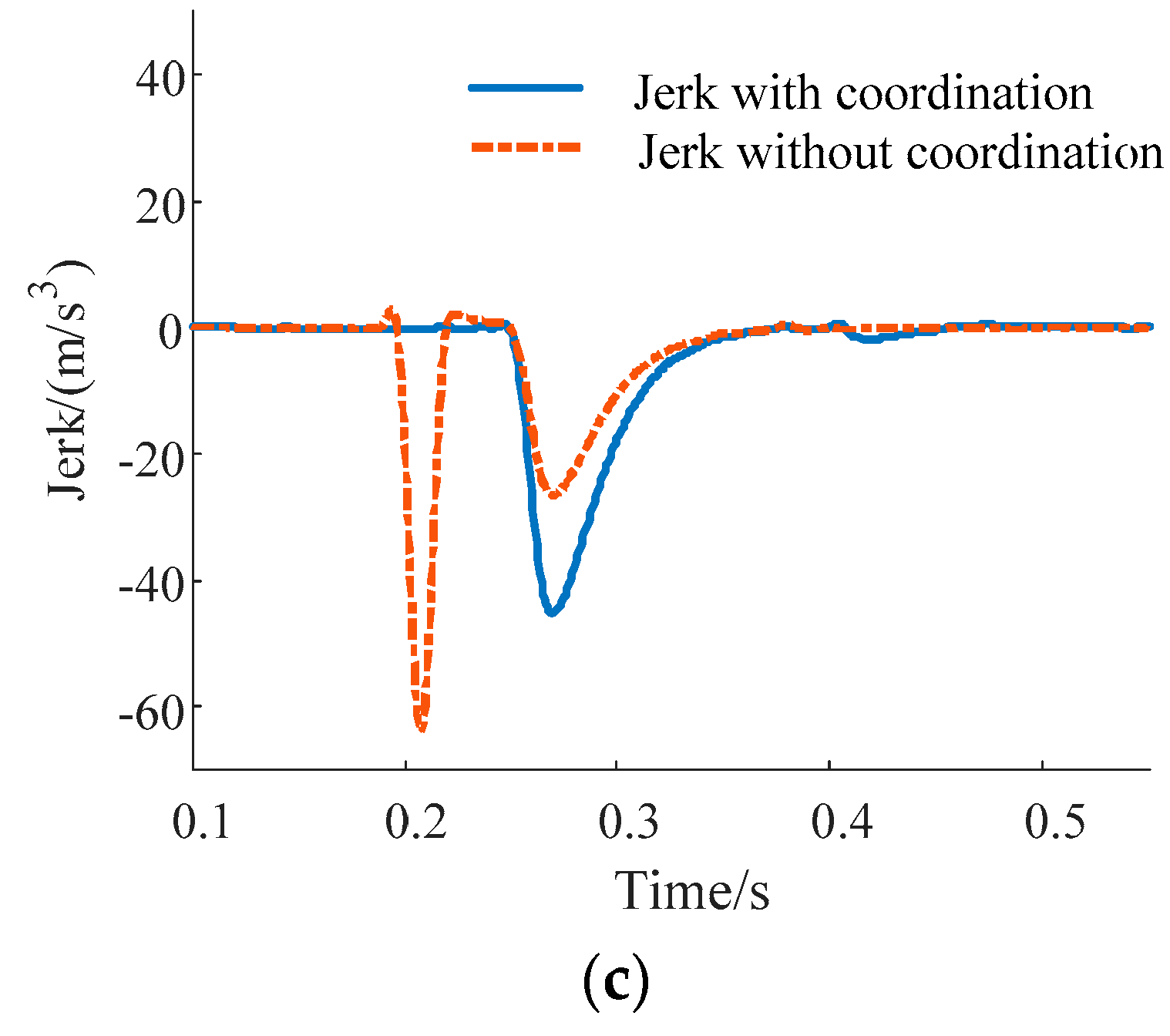
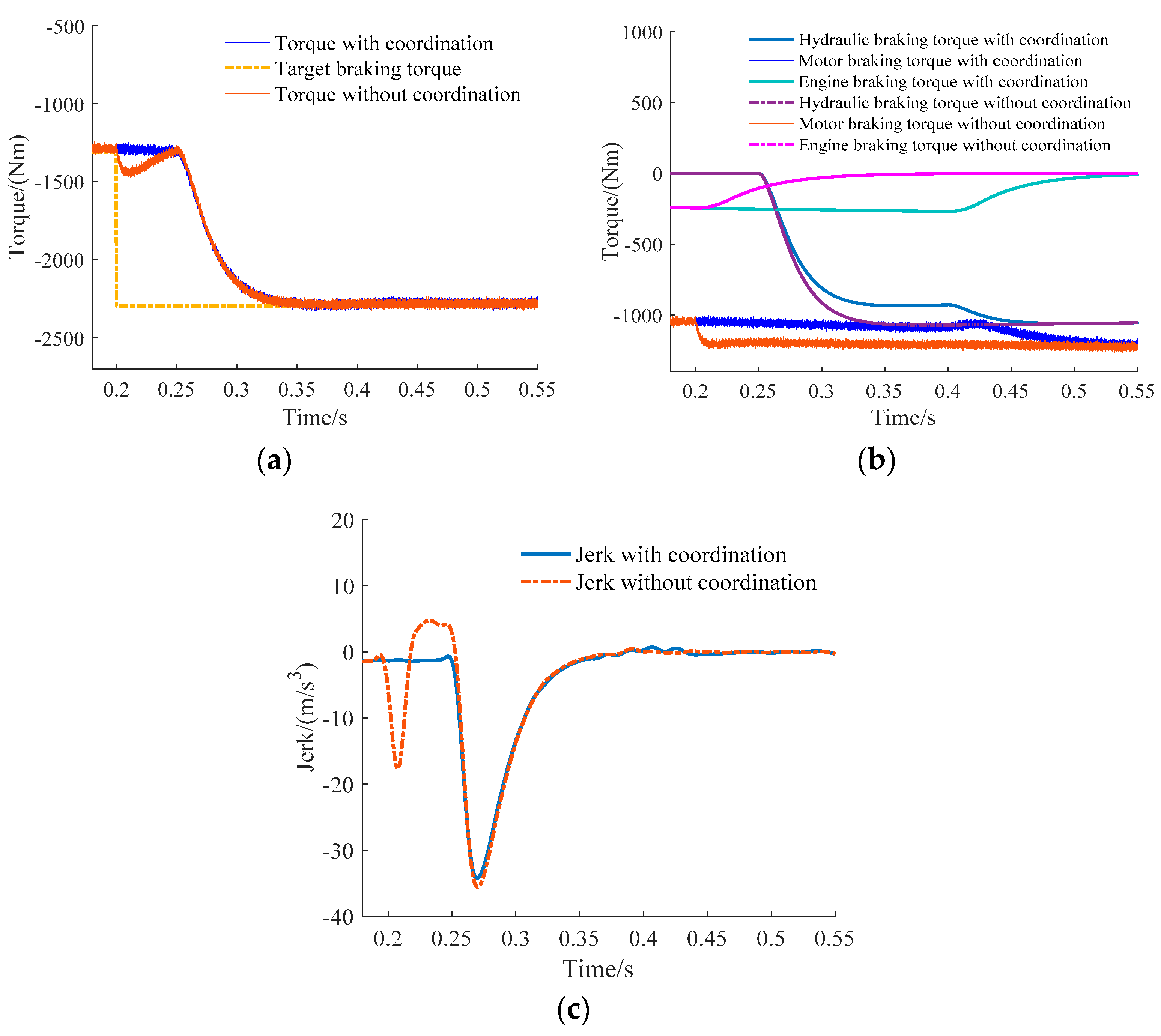
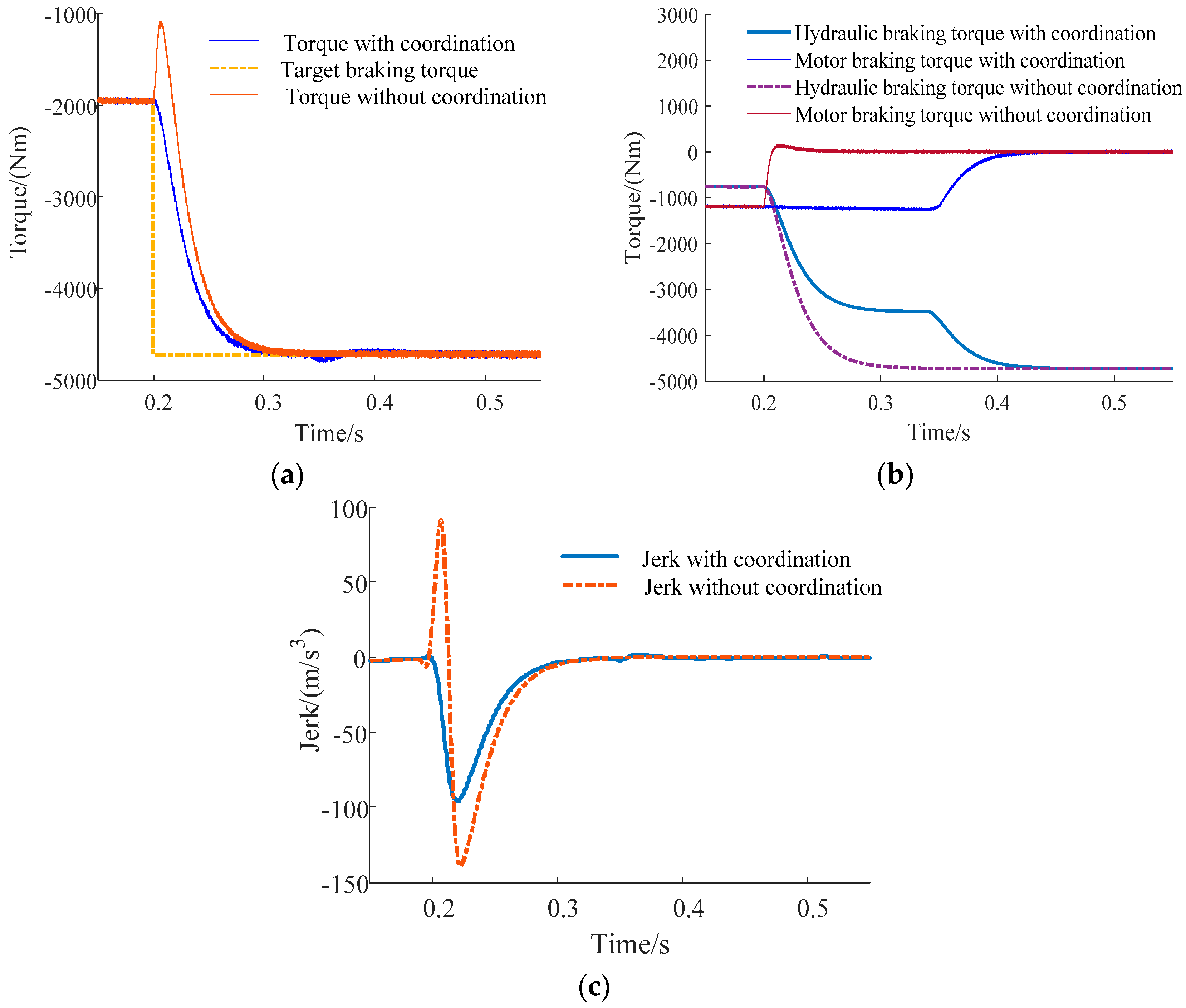
5. Simulation Results and Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhao, Z.; He, N.; Zhu, Y.; Yu, Z. Mode Transition Control for Four Wheel Drive Hybrid Electric Car. J. Mech. Eng. 2011, 47, 100–101. [Google Scholar] [CrossRef]
- Kerem, K. Modeling and Control of a Hybrid-Electric Vehicle for Drivability and Fuel Economy Improvements. Ph.D. Thesis, Ohio State University, Columbus, OH, USA, May 2008. [Google Scholar]
- Steven, M. Mechanical and Regenerative Braking Integration for a Hybrid Electric Vehicle. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, August 2008. [Google Scholar]
- Zhang, J.; Lu, C.; Li, Y.; He, C. Status quo and prospect of regenerative braking technology in electric cars. Automot. Eng. 2014, 36, 911–917. [Google Scholar]
- Zheng, Z. Research of Brake Pedal Stroke Simulator and Braking Smoothness Based on Electric-Wheel Vehicle. Ph.D. Thesis, Jilin University, Changchun, China, June 2013. [Google Scholar]
- Korowais, K.; Westervelt, E.R.; Rizzoni, G. Toward the systematic Design of Controllers for Smooth Hybrid Electric Vehicle Mode Changes. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007. [Google Scholar]
- Yang, Y.; Huang, J.; Qin, D.; Duan, Z. Control Strategy for Operation Mode Switch of Dual-Clutch Hybrid Electric Vehicle. Automot. Eng. 2013, 35, 723–730. [Google Scholar]
- Yang, Y.; Huang, J.; Qin, D.; Yang, W. Coordinated Torque Control for Model-switch between Motor and Engine Driving in Heavy Hybrid Electric Vehicle. Appl. Mech. Mater. 2011, 86, 779–783. [Google Scholar] [CrossRef]
- Zhang, T. Study on the Coordination Control Algorithm of Braking Force for HEV Bus. Master’s Thesis, Jilin University, Changchun, China, June 2011. [Google Scholar]
- Fu, X.; Luo, Y.; Han, Y.; Jiang, F.; Li, K. Coordinated Control Strategy for the Electro-Hydraulic Braking System of Intelligent Hybrid Electric Vehicle. Automot. Eng. 2011, 33, 915–919. [Google Scholar]
- Numasato, H.; Tomizuka, M. Settling Control and Performance of a Dual-Actuator. IEEE/ASME Trans. Mech. 2008, 8, 431–438. [Google Scholar] [CrossRef]
- Wang, K.; He, R. Analysis on Coordination Control Technology of Electric-Mechanical Composite Braking System of Vehicle. Nat. Sci. 2014, 12, 10–17. [Google Scholar]
- Yuan, L.; Hu, B.; Wei, K.; Chen, S. Control Principle of Modern PMSM and Matlab Simulation; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2016. [Google Scholar]
- Jin, L.; Wang, X.; Li, W. Current Sliding Mode Control and Load Disturbance Compensation of PMSM for HEV. Automot. Eng. 2013, 35, 553–558. [Google Scholar]
- Yang, Y.; Li, X.; Su, N.; Huang, J. Control Strategy for Mode-Switch of Full Hybrid Electric Vehicle. China J. Highw. Transp. 2014, 27, 109–119. [Google Scholar]
- Gong, M.; Zhao, D.; Xu, M. Two-way Hydraulic Braking System Performance Simulation of Heavy Vehicles. J. Jilin Univ. Technol. 2010, 40, 725–728. [Google Scholar]
- Wu, T. Study on the Dynamic Coordination Control Algorithm of Braking Force for EV. Master’s Thesis, Jilin University, Changchun, China, June 2013. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Parameters | Value |
|---|---|---|
| Vehicle | Mass/kg | 1800 |
| Engine | Displacement/L | 1.597 |
| Peak power/Kw | 69 | |
| ISG | Peak power/Kw | 28 |
| PMSM | Peak power/Kw | 27 |
| Battery | Type of battery | Lithium |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Wang, C.; Zhang, Q.; He, X. Torque Coordination Control during Braking Mode Switch for a Plug-in Hybrid Electric Vehicle. Energies 2017, 10, 1684. https://doi.org/10.3390/en10111684
Yang Y, Wang C, Zhang Q, He X. Torque Coordination Control during Braking Mode Switch for a Plug-in Hybrid Electric Vehicle. Energies. 2017; 10(11):1684. https://doi.org/10.3390/en10111684
Chicago/Turabian StyleYang, Yang, Chao Wang, Quanrang Zhang, and Xiaolong He. 2017. "Torque Coordination Control during Braking Mode Switch for a Plug-in Hybrid Electric Vehicle" Energies 10, no. 11: 1684. https://doi.org/10.3390/en10111684