Techniques for Reduction of the Cogging Torque in Claw Pole Machines with SMC Cores

 ,
,  ,
, 
Abstract
:1. Introduction
2. Cogging Torque Calculation and Analysis Method
2.1. Analysis of Cogging Torque
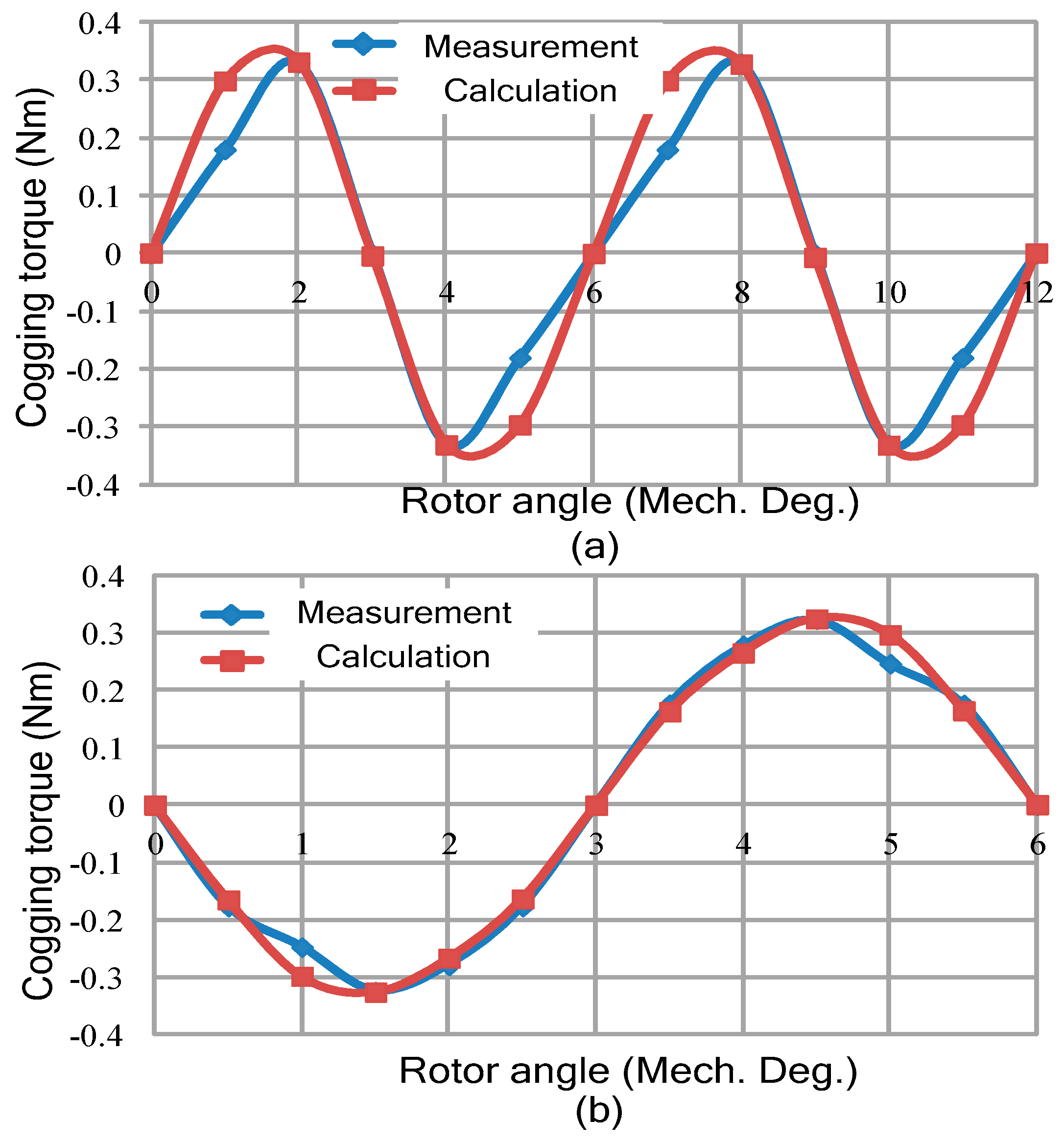
2.2. Calculation of Cogging Torque
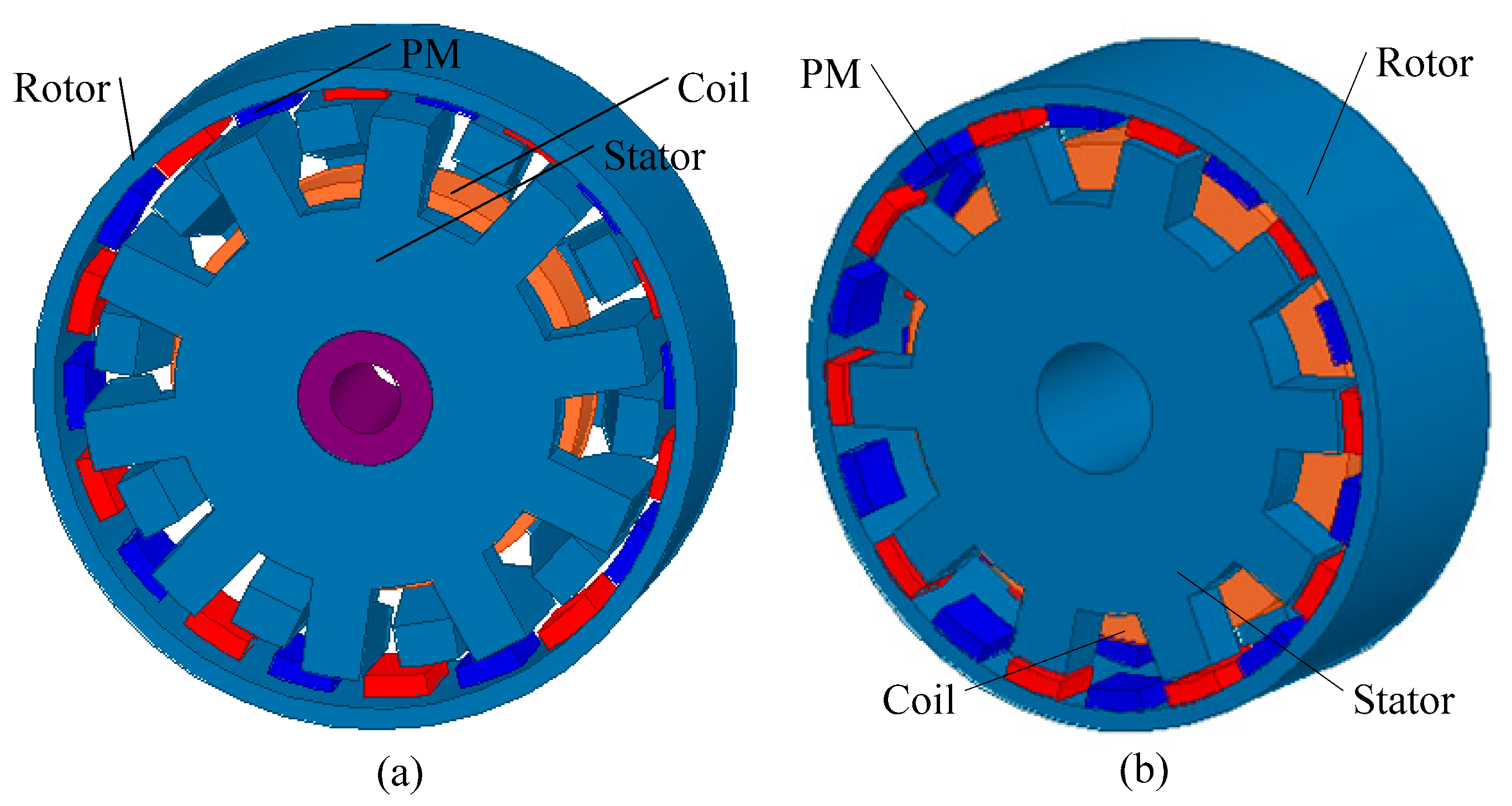
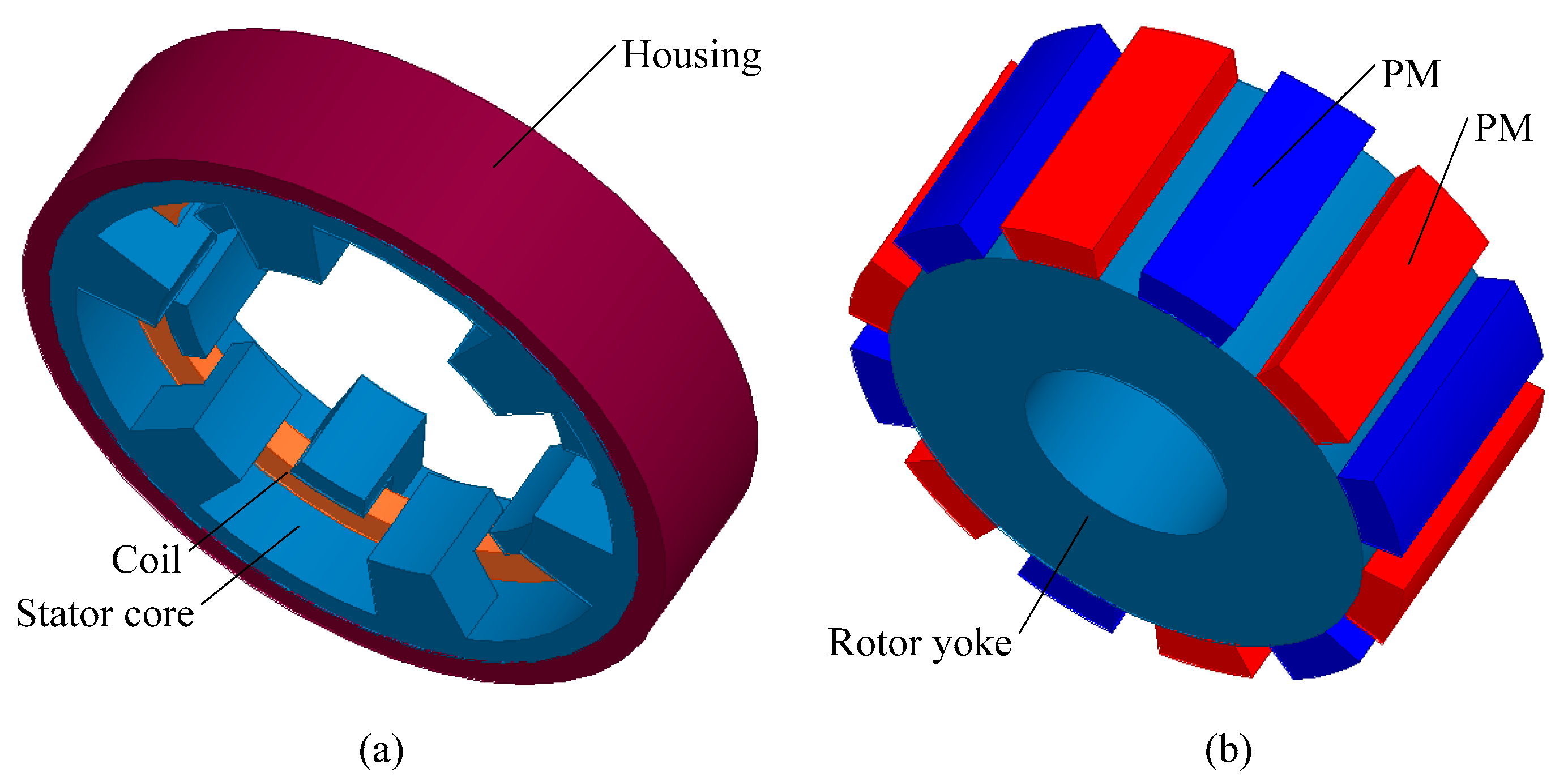
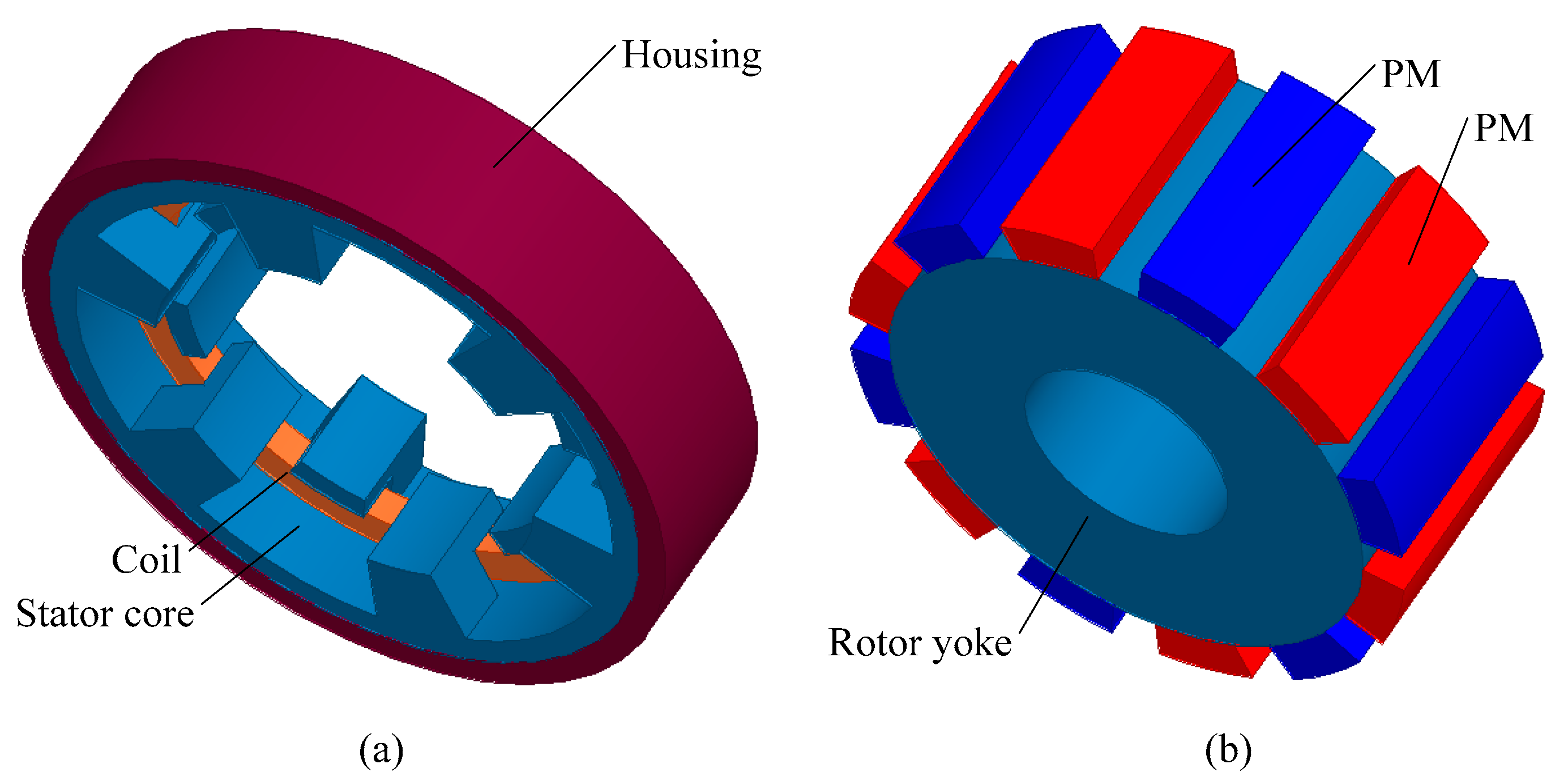
3. Claw Pole Machine with SMC Core and Cogging Torque Reduction Method
3.1. Claw Pole Machine and Its Dimension
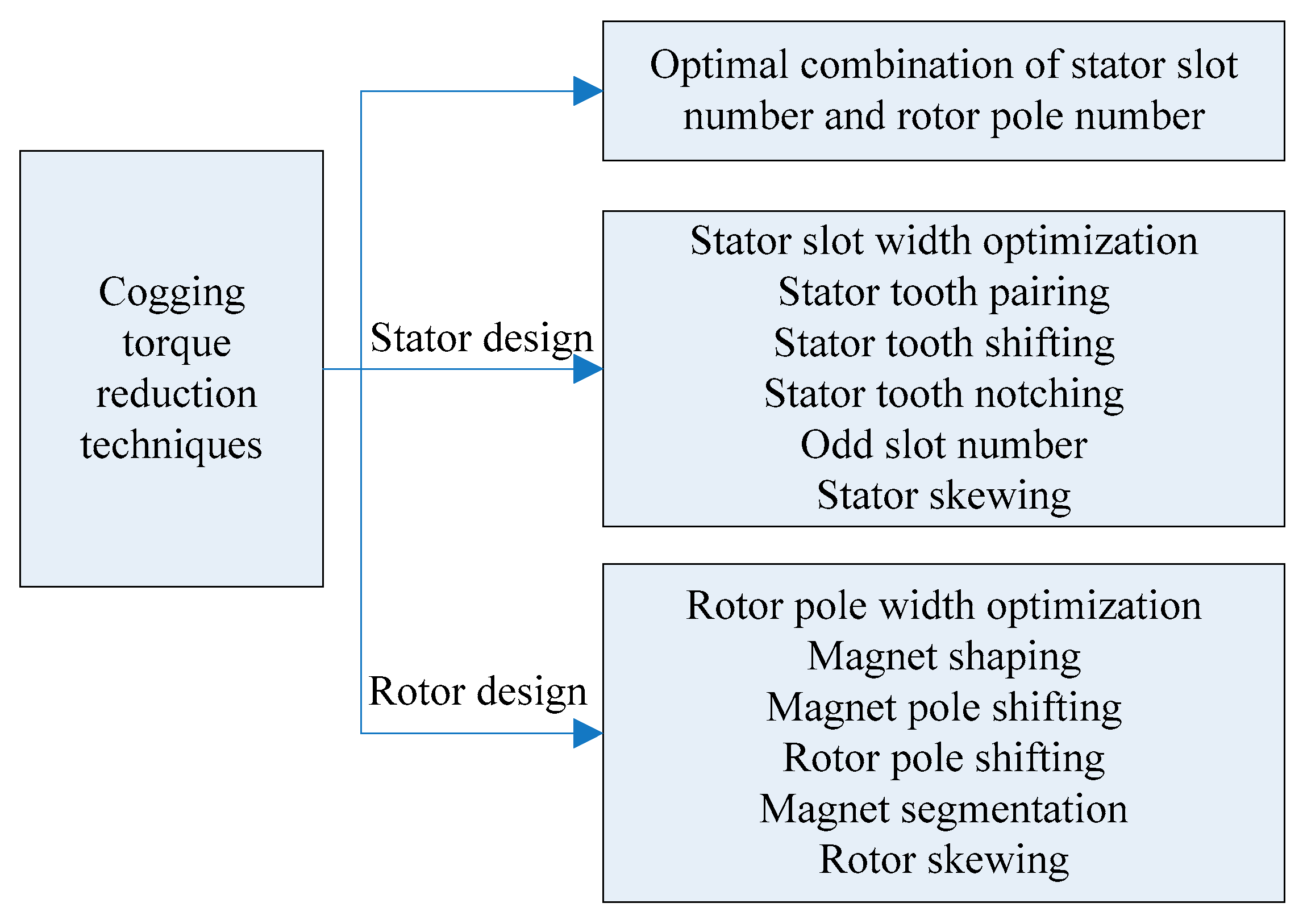
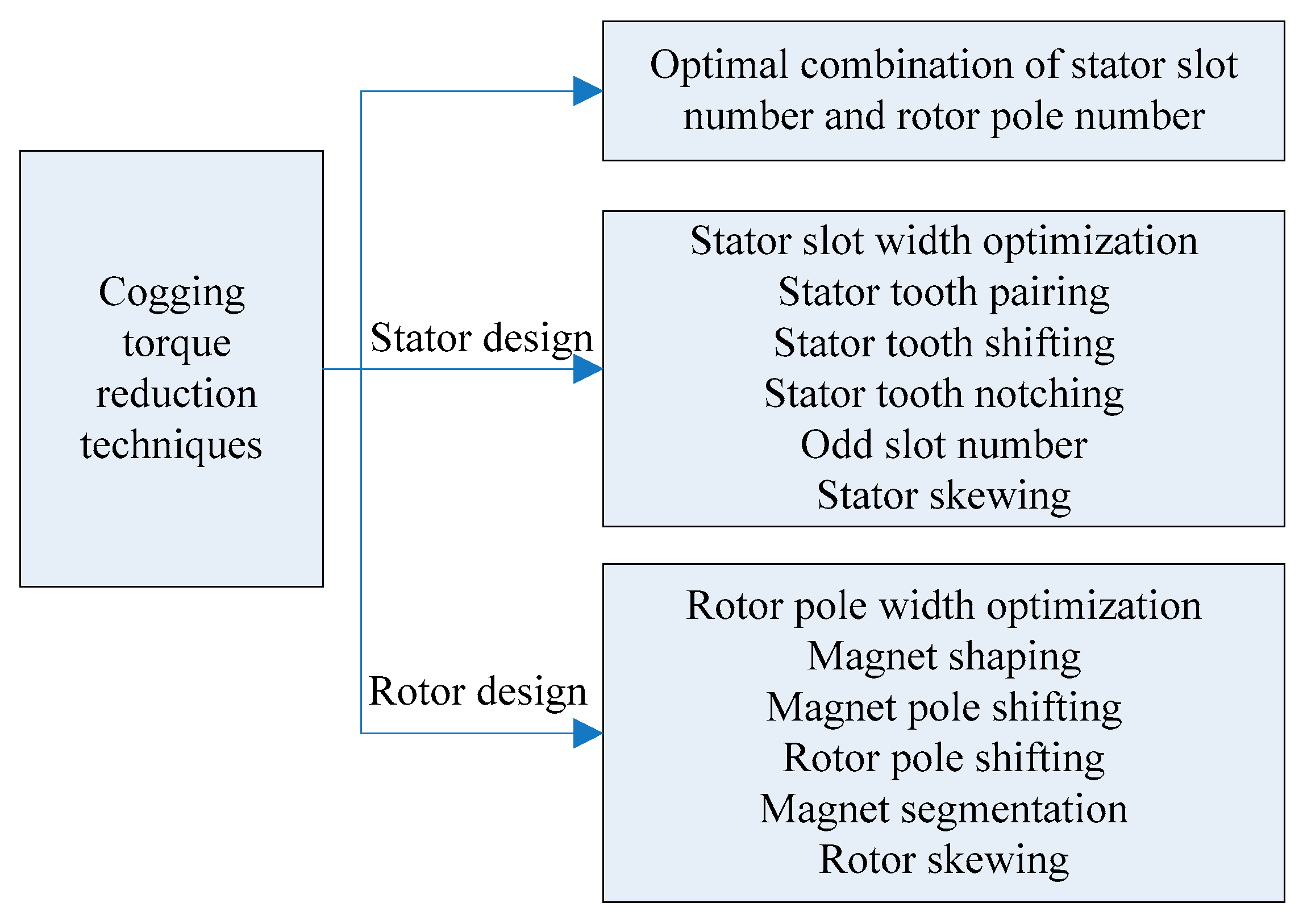
3.2. Cogging Torque Reduction Techniques in PMSM
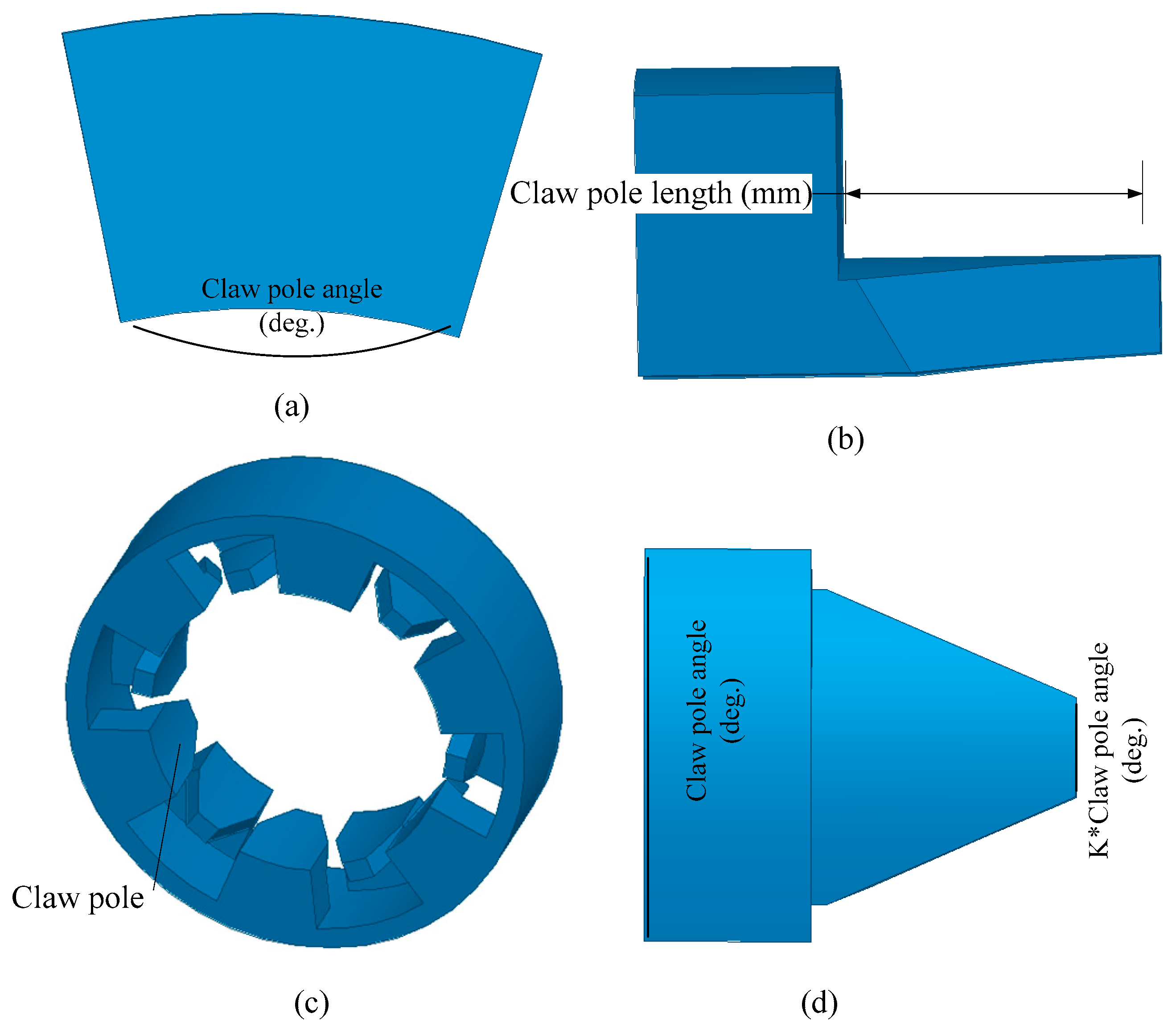
4. Reduction of Cogging Torque by Changing the Claw Pole Shape
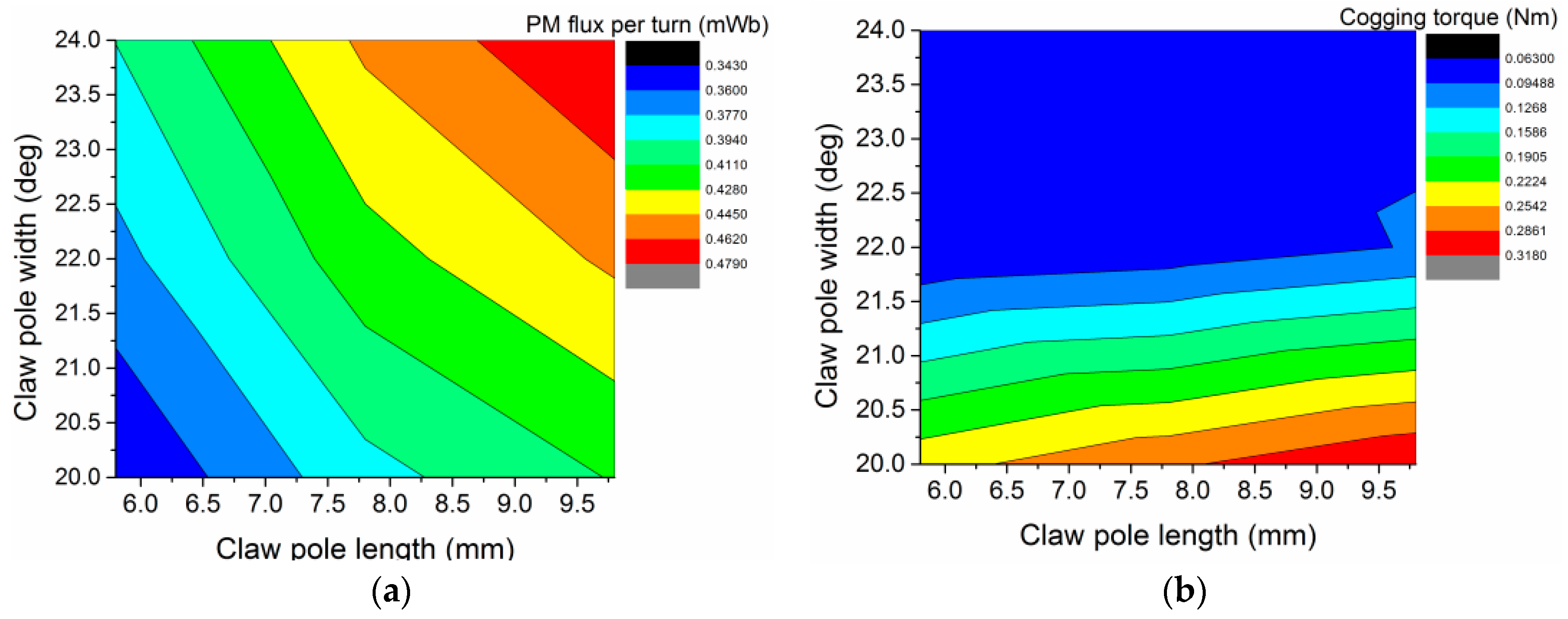
4.1. Claw Pole Dimension
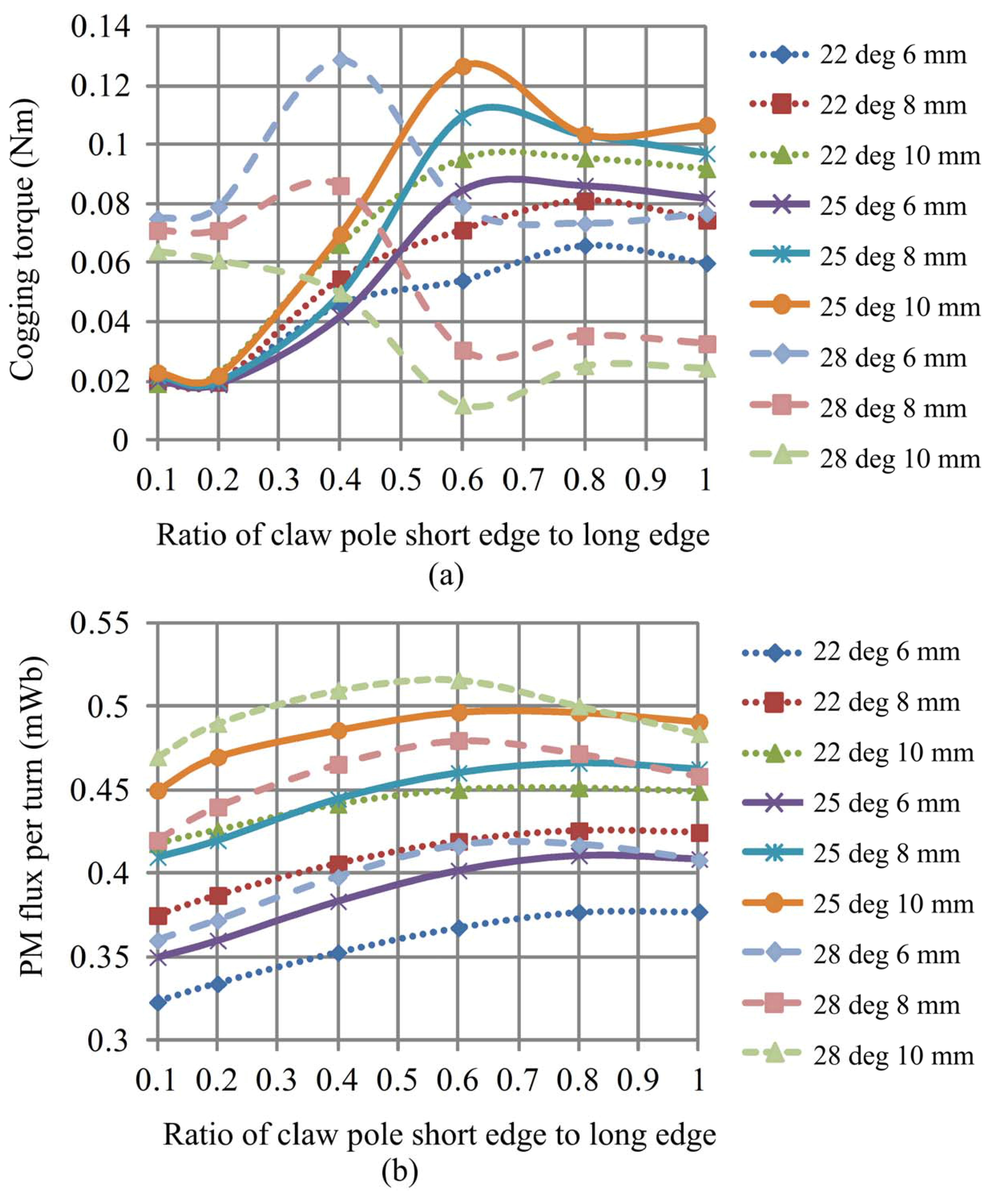
4.2. Unequal Width Claw Pole Structure
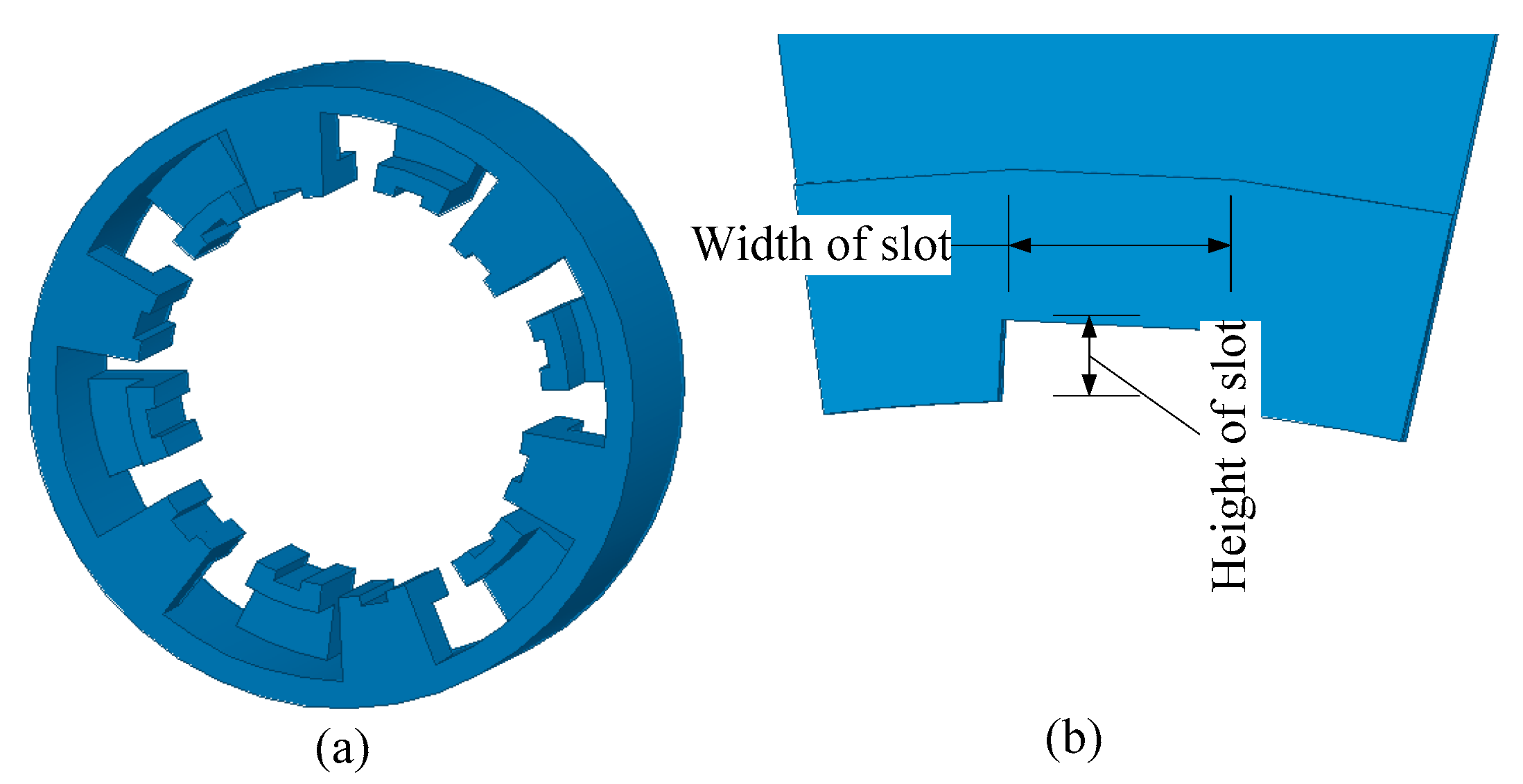
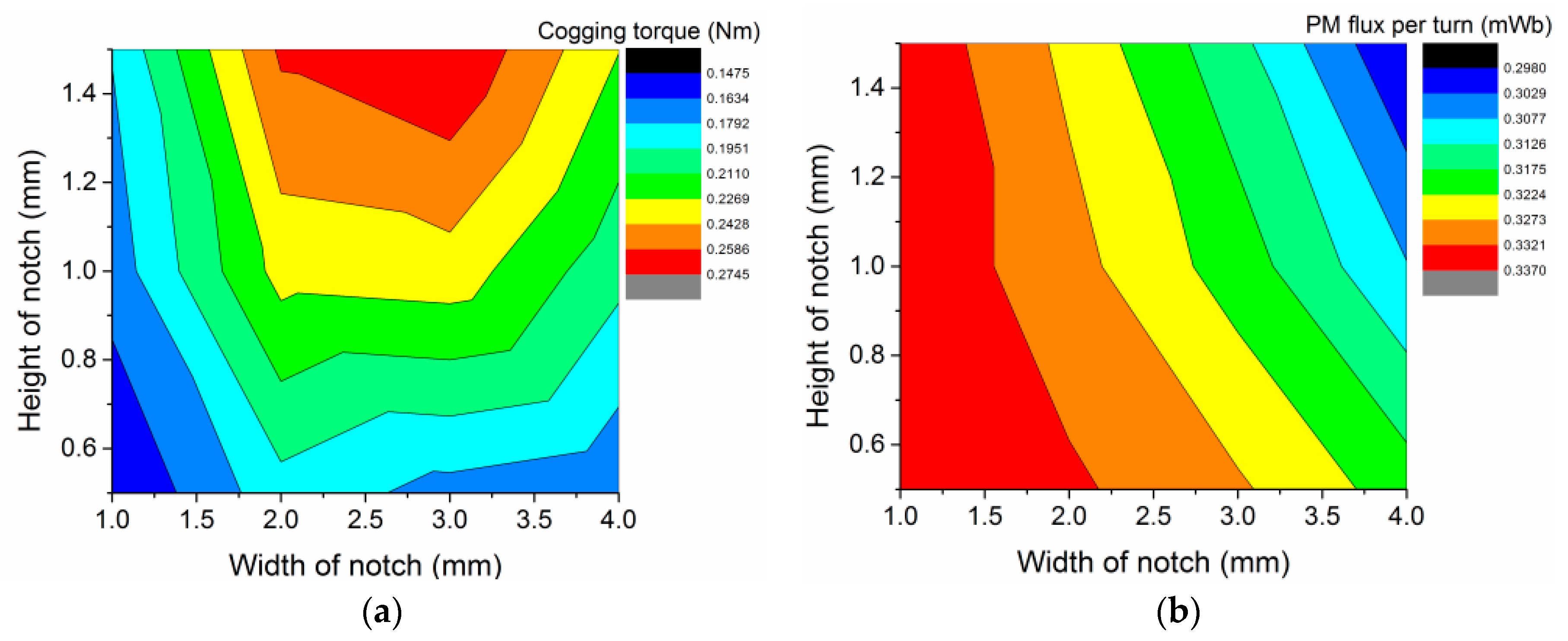
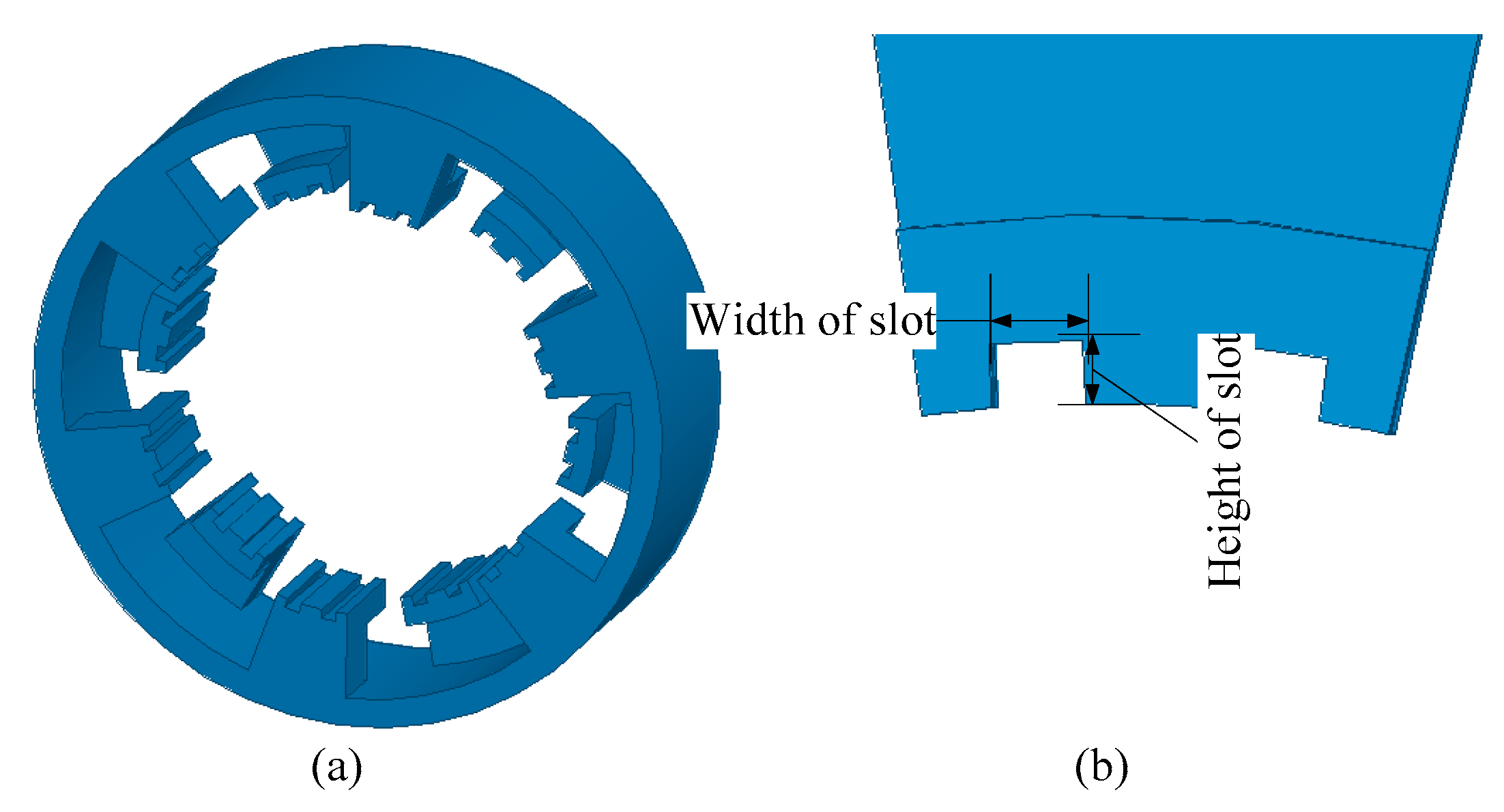
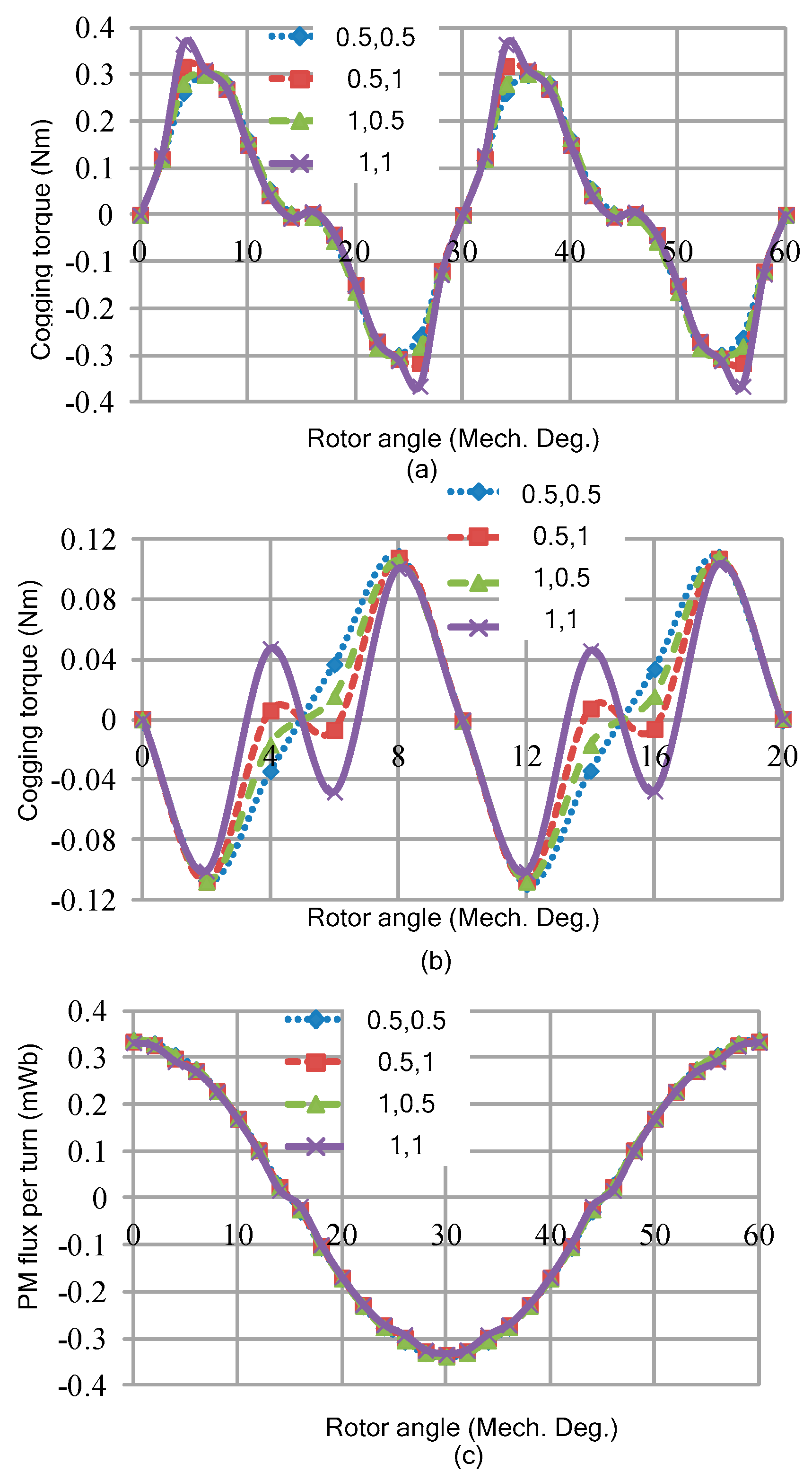
4.3. Stator Tooth Notching
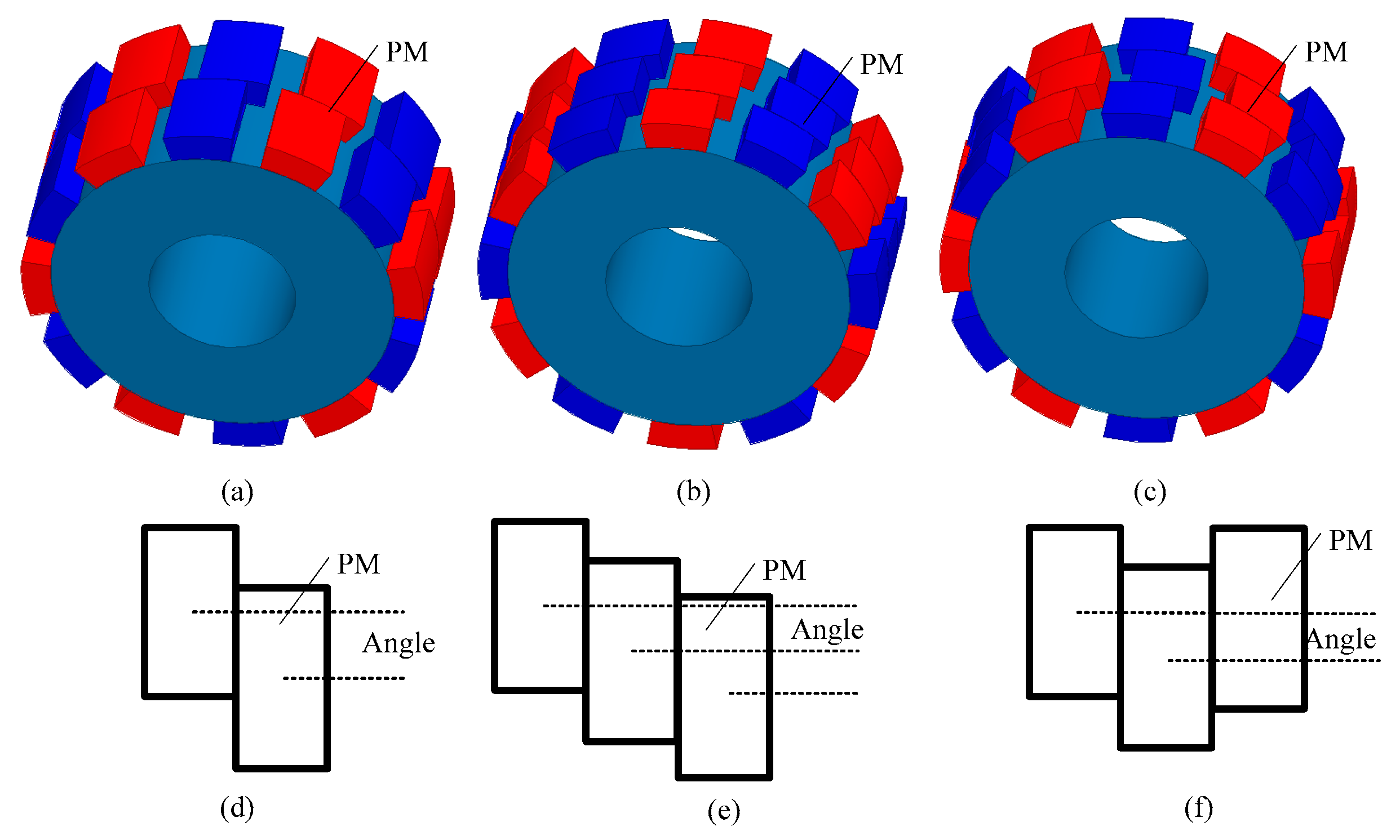
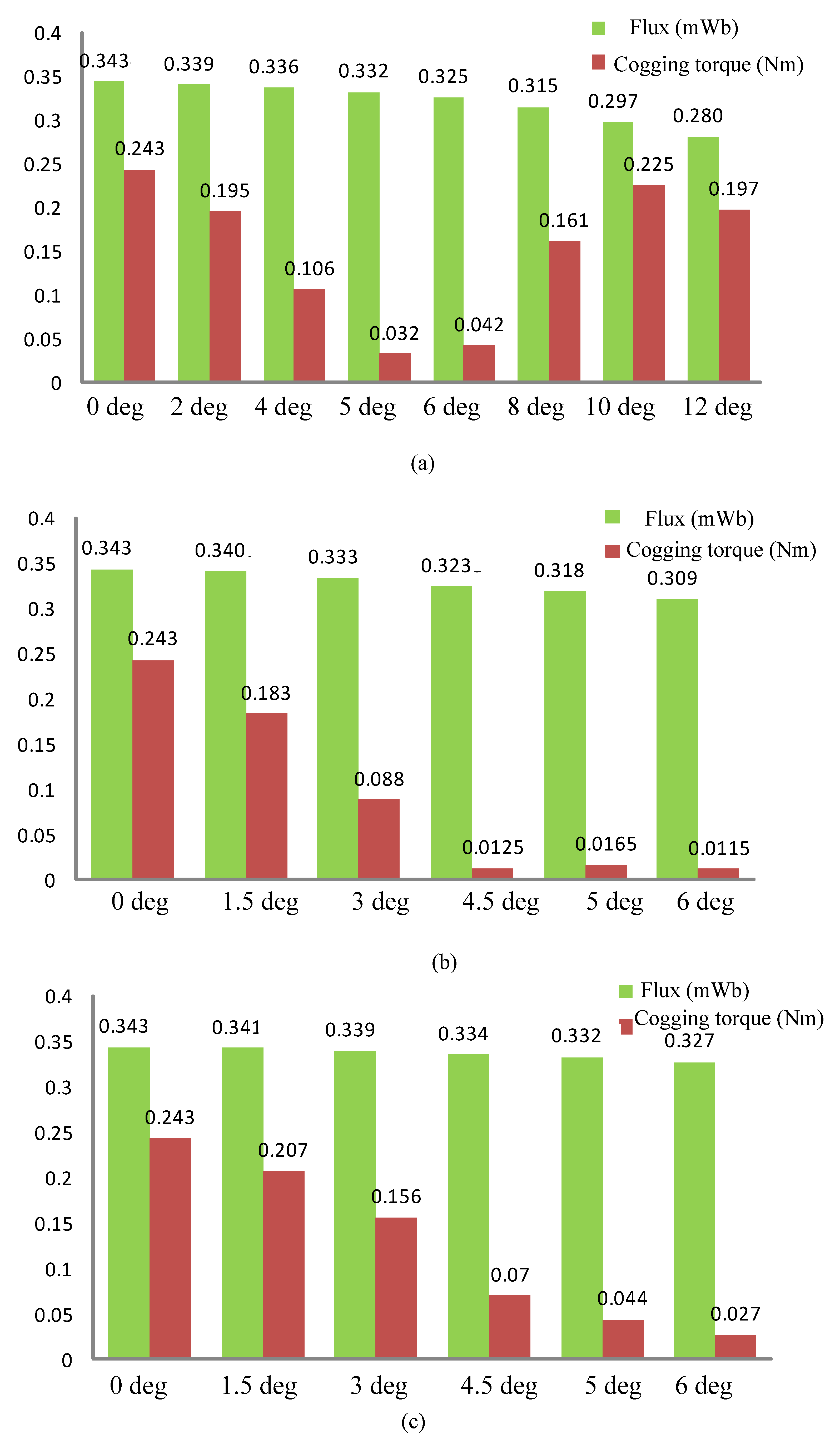
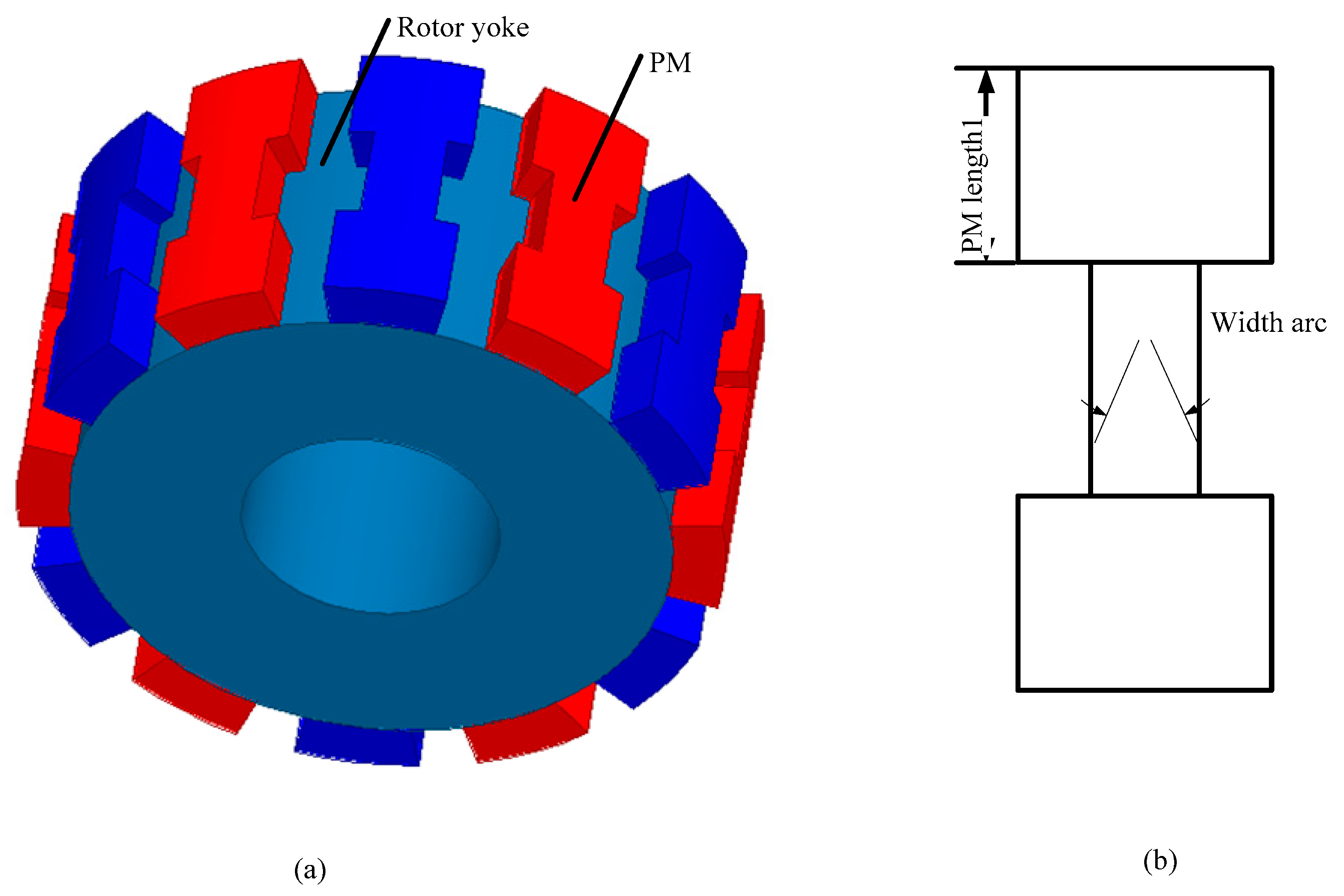
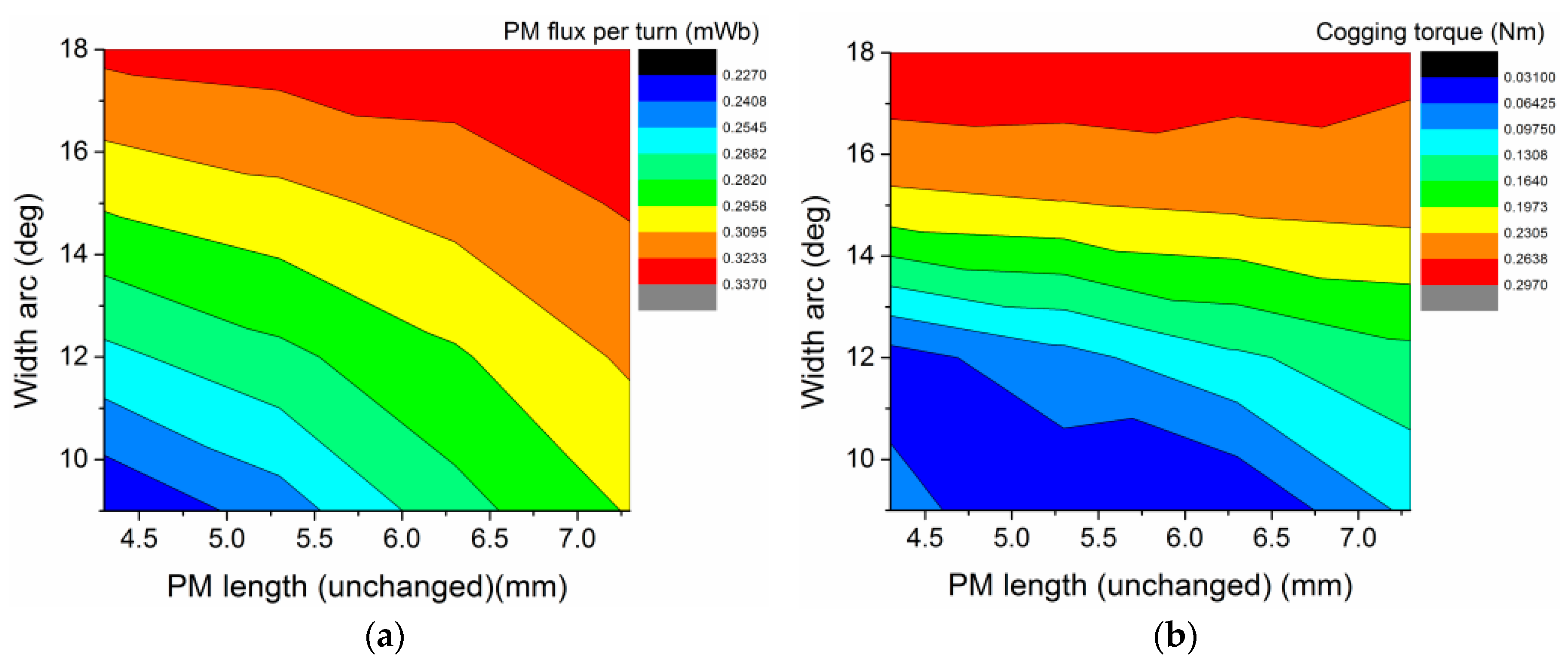
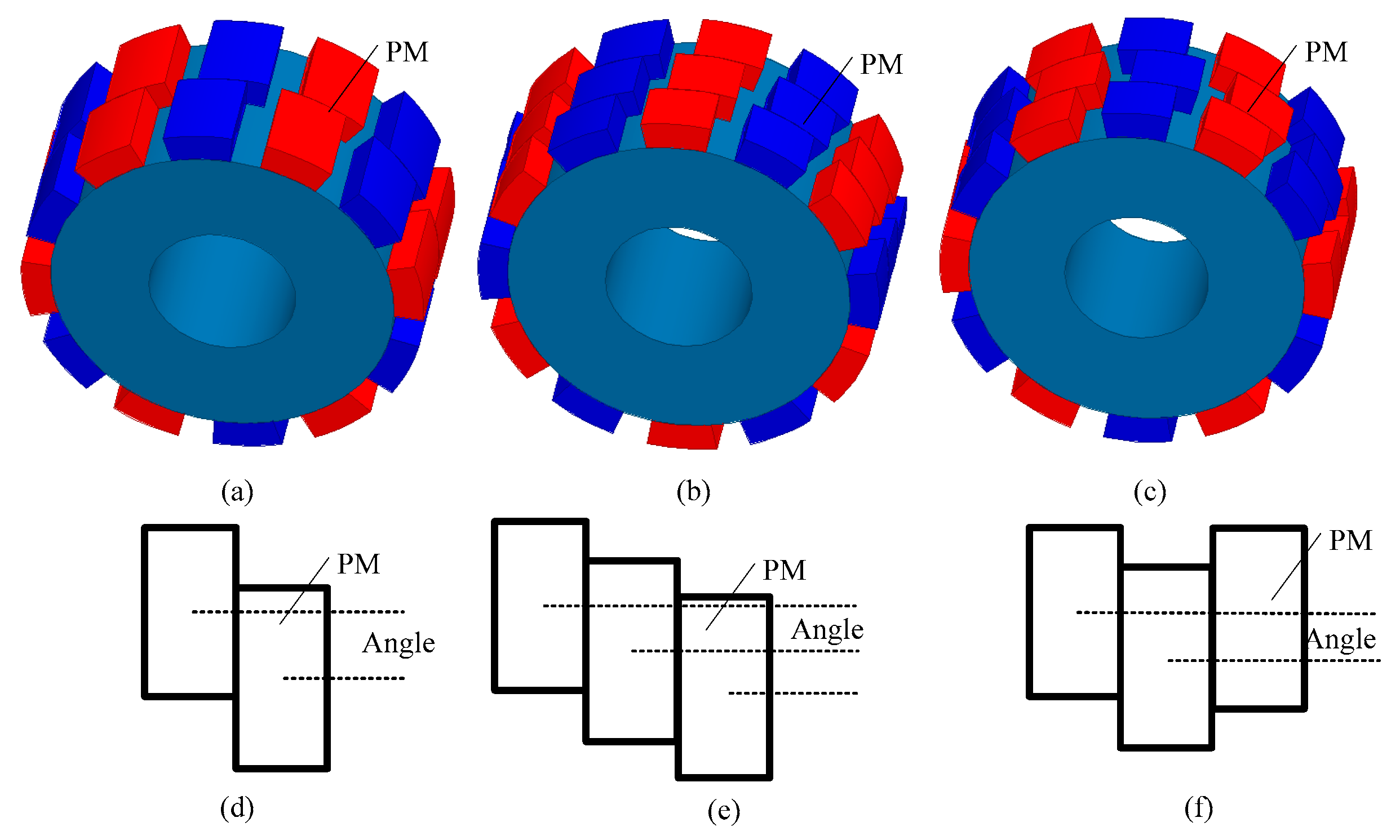
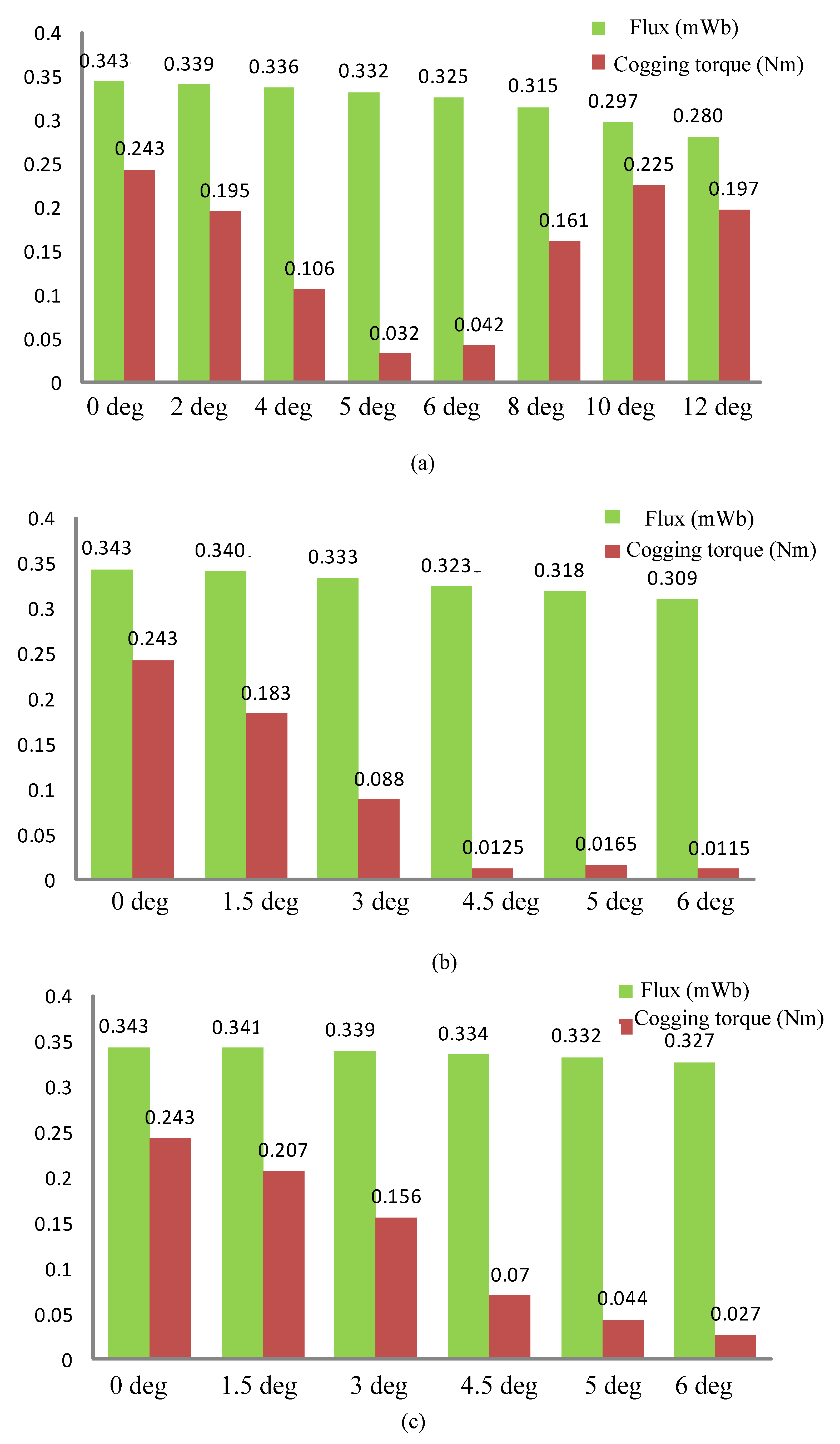
5. Reduction of Cogging Torque by Using Magnet Step Skewing
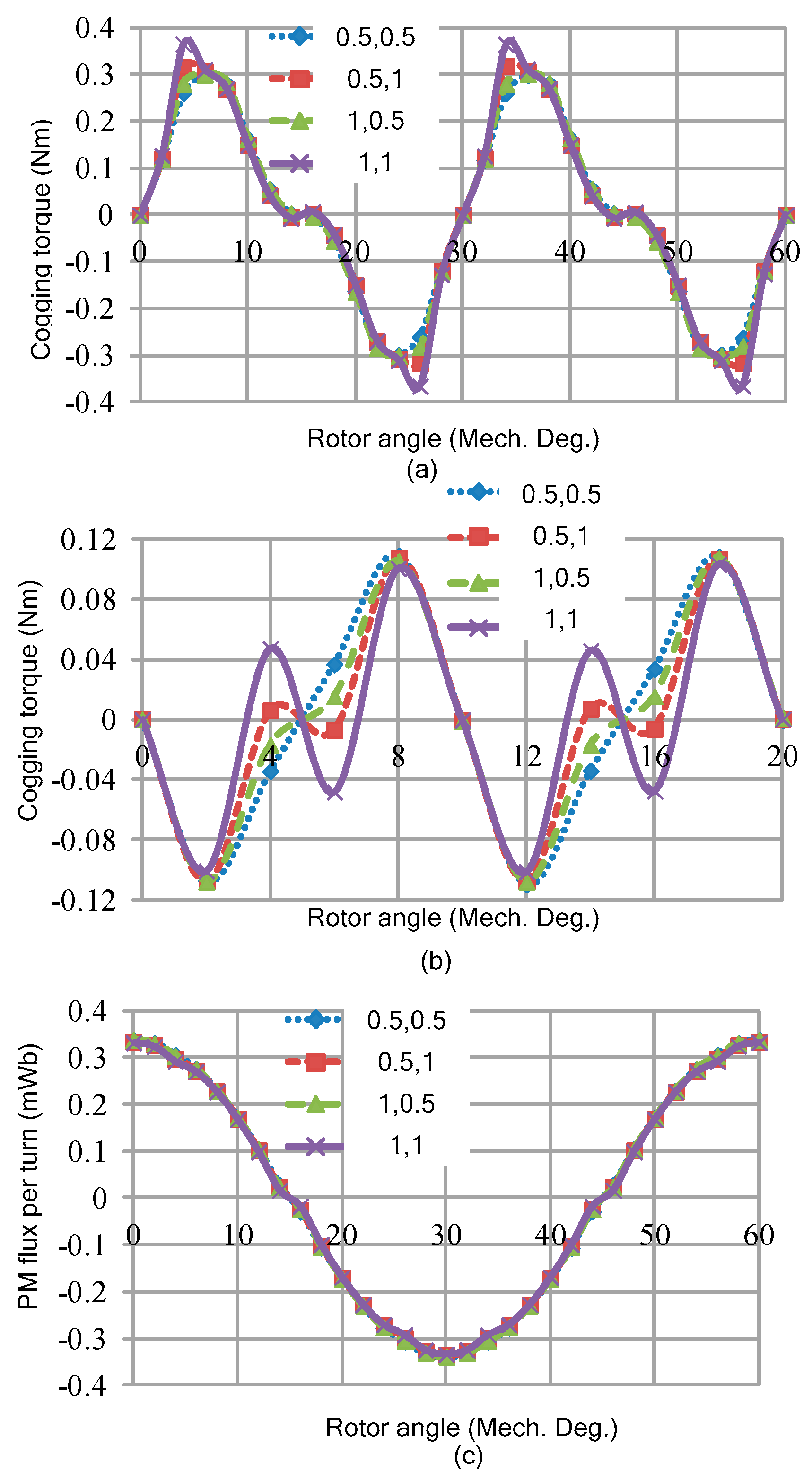
6. Reduction of Cogging Torque by Using Magnet Axial Pairing and Magnet Shifting
6.1. Magnet Axial Pairing
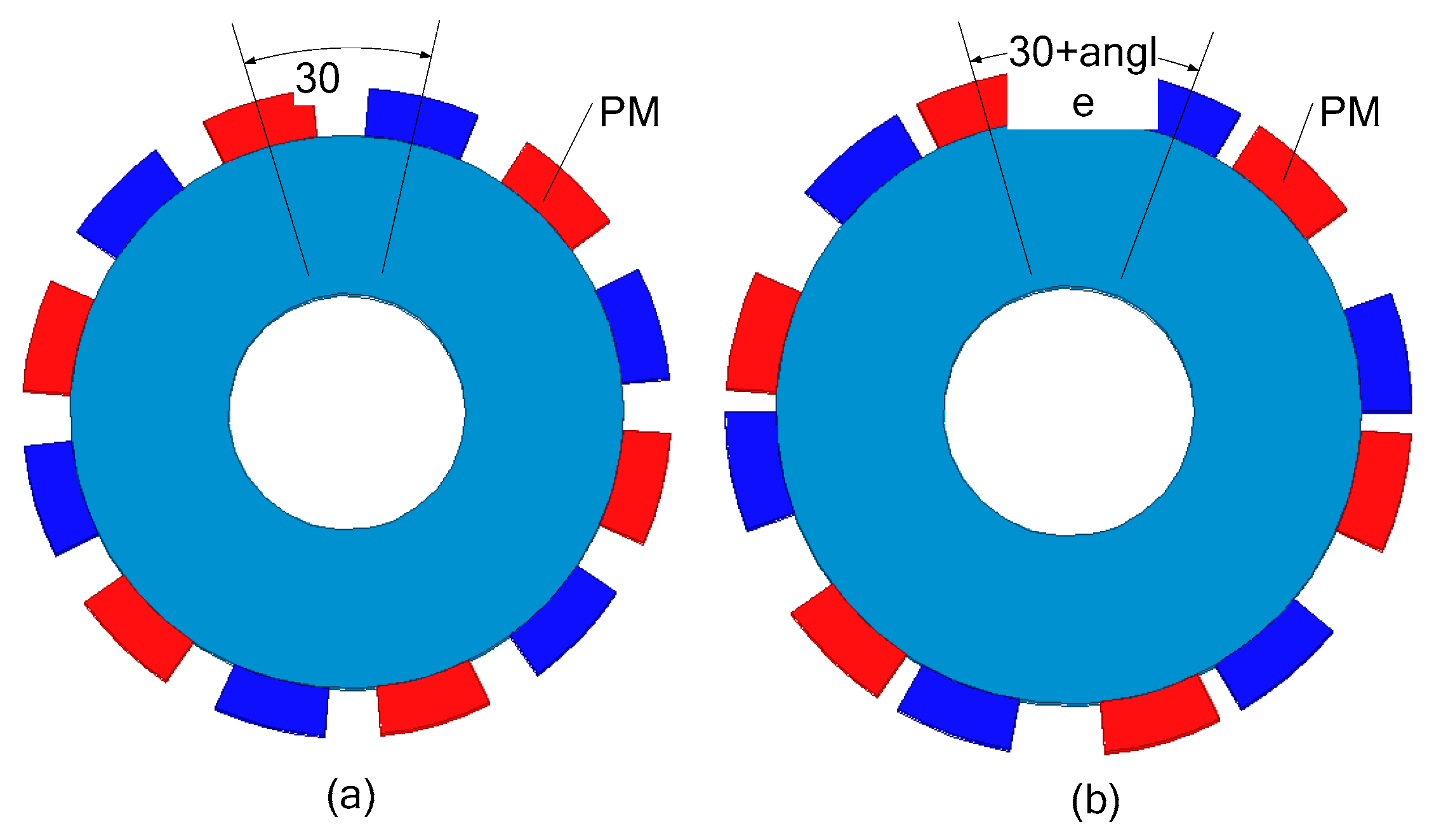
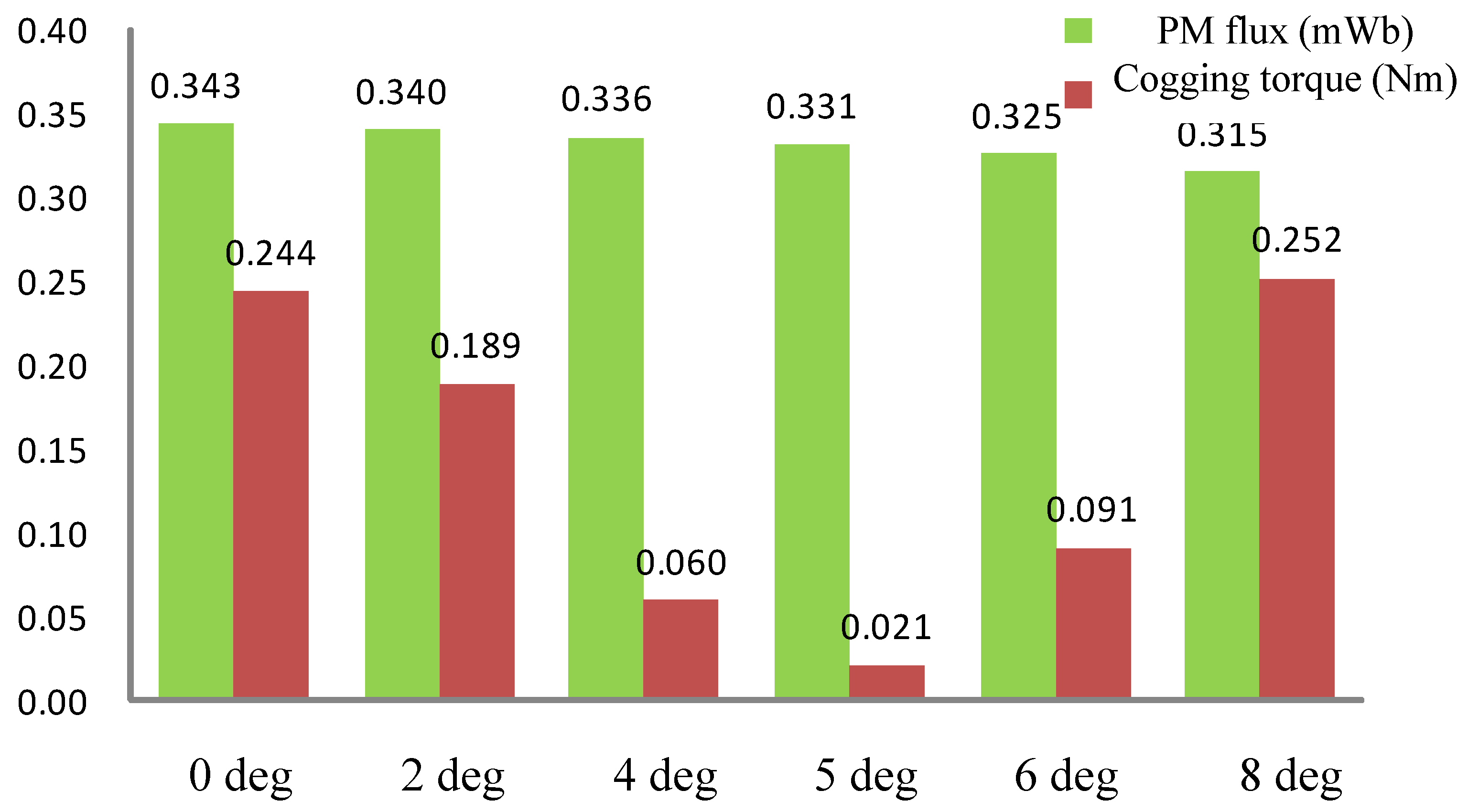
6.2. Magnet Shifting
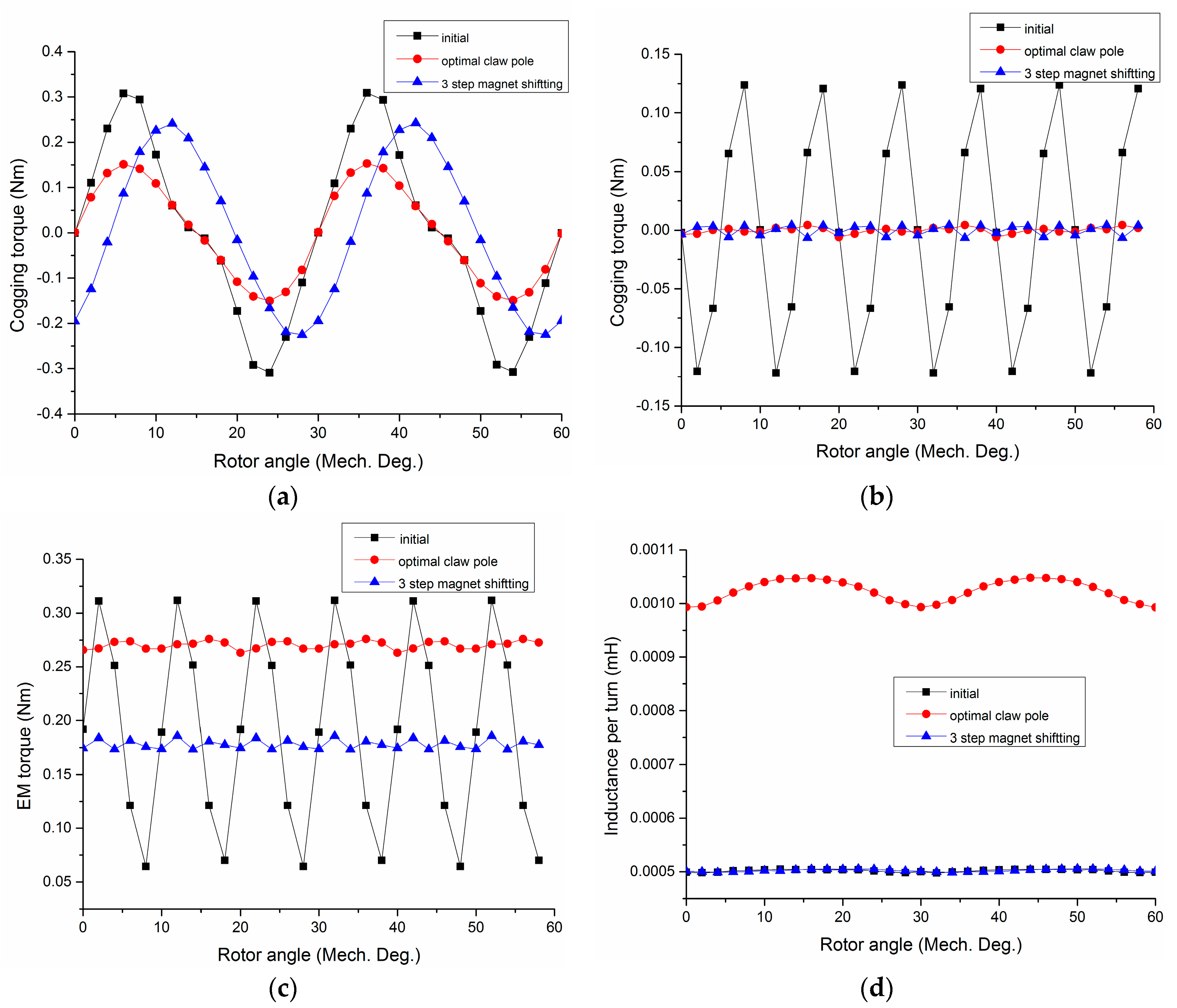
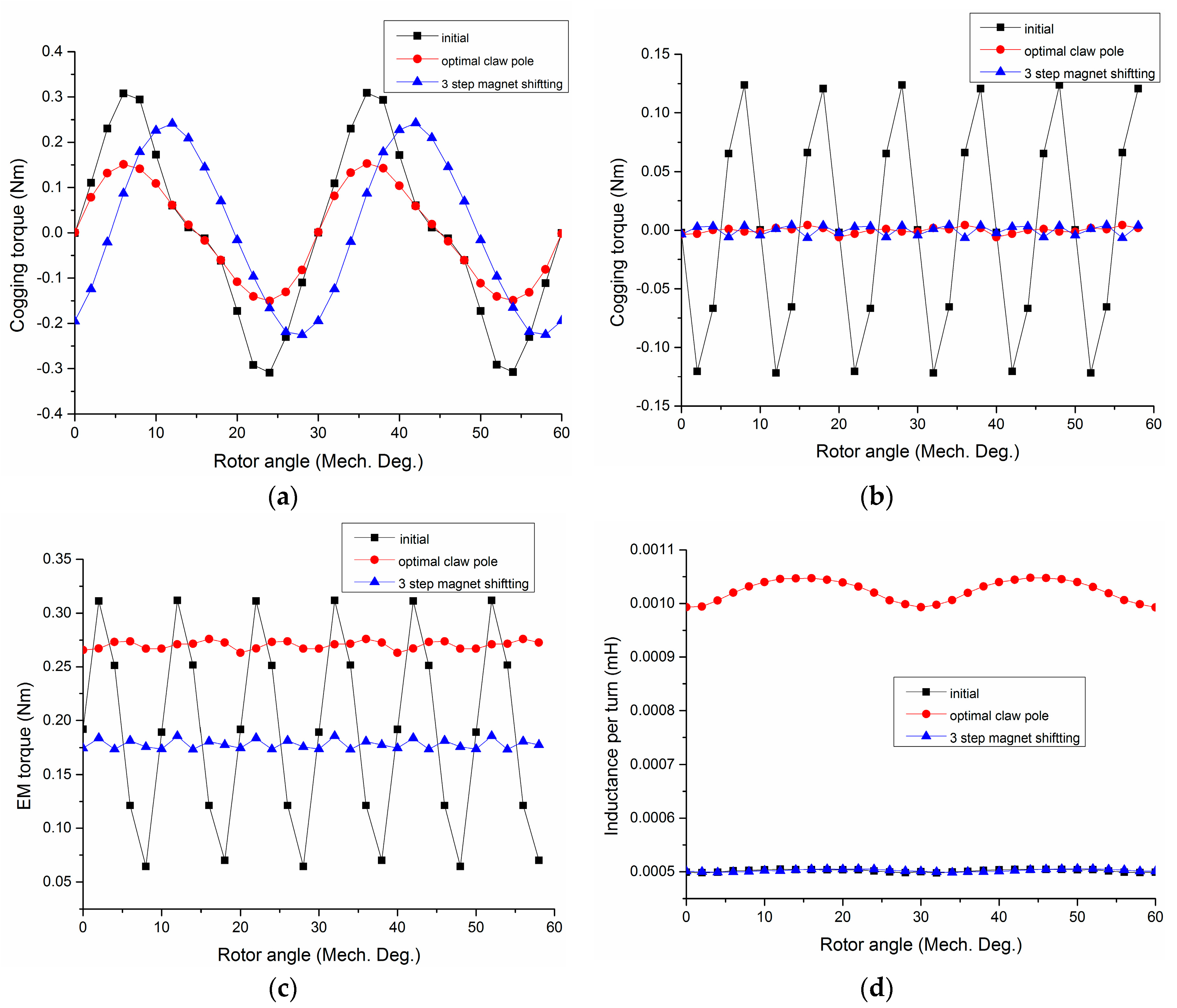
7. Performance Comparison and Discussion
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fei, W.; Zhu, Z.Q. Comparison of cogging torque reduction in permanent magnet brushless machines by conventional and herringbone skewing techniques. IEEE Trans. Energy Convers. 2013, 28, 664–674. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Design techniques for reducing the cogging torque in surface-mounted PM motors. IEEE Trans. Ind. Appl. 2002, 38, 1259–1265. [Google Scholar] [CrossRef]
- Aydin, M.; Zhu, Z.Q.; Lipo, T.A.; Howe, D. Minimization of cogging torque in axial-flux permanent-magnet machines: Design concepts. IEEE Trans. Magn. 2007, 43, 3614–3622. [Google Scholar] [CrossRef]
- Schmidt, E. 3-D finite element analysis of the cogging torque of a transverse flux machine. IEEE Trans. Magn. 2005, 41, 1836–1839. [Google Scholar] [CrossRef]
- Yan, J.; Lin, H.; Zhu, Z.Q.; Jin, P.; Guo, Y. Cogging torque optimization of flux switching transverse flux permanent magnet machine. IEEE Trans. Magn. 2013, 49, 2169–2172. [Google Scholar] [CrossRef]
- Wu, L.J.; Zhu, Z.Q.; Staton, D.A.; Popescu, M.; Hawkins, D. Comparison of analytical models of cogging torque in surface-mounted PM machines. IEEE Trans. Ind. Electron. 2012, 59, 2414–2425. [Google Scholar] [CrossRef]
- Lin, D.; Ho, S.L.; Fu, W.N. Analytical prediction of cogging torque in surface-mounted permanent-magnet motors. IEEE Trans. Magn. 2009, 45, 3296–3302. [Google Scholar] [CrossRef]
- Dosiek, L.; Pillay, P. Cogging torque reduction in permanent magnet machines. IEEE Trans. Ind. Appl. 2007, 43, 1565–1571. [Google Scholar] [CrossRef] [Green Version]
- Niguchi, N.; Hirata, K. Cogging torque analysis of magnetic gear. IEEE Trans. Ind. Electron. 2012, 59, 2189–2197. [Google Scholar] [CrossRef]
- Gulec, M.; Aydin, M. Reduction of cogging torque in double-rotor axial flux permanent magnet disc motors: A review of cost effective magnet skewing techniques with experimental verification. IEEE Trans. Electron. 2013, 61, 5025–5034. [Google Scholar]
- Bianchini, C.; Immovilli, F.; Lorenzani, E.; Bellini, A.; Davoli, M. Review of design solutions for internal permanent-magnet machines cogging torque reduction. IEEE Trans. Magn. 2012, 48, 2685–2693. [Google Scholar] [CrossRef]
- Zhu, Z.; Liu, Y.; Howe, D. Minimizing the influence of cogging torque on vibration in PM brushless machines by direct torque control. IEEE Trans. Magn. 2006, 42, 3512–3514. [Google Scholar] [CrossRef]
- Liu, T.; Huang, S.; Gao, J.; Lu, K. Cogging torque reduction by slot-opening shift for permanent magnet machines. IEEE Trans. Magn. 2013, 49, 4028–4031. [Google Scholar] [CrossRef]
- Choi, J.S.; Izui, K.; Nishiwaki, S.; Kawamoto, A.; Nomura, T. Topology optimization of the stator for minimizing cogging torque of IPM motors. IEEE Trans. Magn. 2011, 47, 3024–3027. [Google Scholar] [CrossRef]
- Lee, J.Y.; Chang, J.H.; Kang, D.H.; Kim, S.I.; Hong, J.P. Tooth shape optimization for cogging torque reduction of transverse flux rotary motor using design of experiment and response surface methodology. IEEE Trans. Magn. 2007, 43, 1817–1820. [Google Scholar] [CrossRef]
- Gašparin, L.; Černigoj, A.; Markič, S.; Fišer, R. Additional cogging torque components in permanent-magnet motors due to manufacturing imperfections. IEEE Trans. Magn. 2009, 45, 1210–1213. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.; Dorrell, D.G. Design and analysis of a claw pole permanent magnet motor with molded soft magnetic composite core. IEEE Trans. Magn. 2009, 45, 4582–4585. [Google Scholar]
- Zhu, J.G.; Guo, Y.G.; Lin, Z.W.; Li, Y.J.; Huang, Y.K. Development of PM transverse flux motors with soft magnetic composite cores. IEEE Trans. Magn. 2011, 47, 4376–4383. [Google Scholar] [CrossRef]
- Deodhar, R.P.; Pride, A.; Bremner, J.J. Design method and experimental verification of a novel technique for torque ripple reduction in stator claw-pole PM machines. IEEE Trans. Ind. Appl. 2015, 51, 3743–3750. [Google Scholar] [CrossRef]
- Masmoudi, A.; Njeh, A.; Mansouri, A.; Trabelsi, H.; Elantably, A. Optimizing the overlap between the stator teeth of a claw poletransverse-flux permanent-magnet Machine. IEEE Trans. Magn. 2004, 40, 1573–1578. [Google Scholar] [CrossRef]
- Pompermaier, C.; Washington, J.; Sjöberg, L.; Ahmed, N. Reduction of cogging torque in transverse flux machines by stator and rotorpoleshaping. In Proceedings of the 2016 IEEE Conference on Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar]
- Ueda, Y.; Takahashi, H.; Ogawa, A.; Akiba, T.; Yoshida, M. Cogging-Torque Reduction of Transverse-Flux Motor by Skewing Stator Poles. IEEE Trans. Magn. 2016, 52. [Google Scholar] [CrossRef]
- Liu, C.C.; Lei, G.; Wang, T.S.; Guo, Y.G.; Wang, Y.H.; Zhu, J.G. Comparison of electrical machines with SMC core. IEEE Trans. Ind. Electron. 2017, 64, 1049–1060. [Google Scholar] [CrossRef]
- Lei, G.; Liu, C.C.; Zhu, J.G.; Guo, Y.G. Techniques for multilevel design optimization of permanent magnet motors. IEEE Trans. Energy Convers. 2015, 30, 1574–1584. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Influence of design parameters on cogging torque in permanent magnet machines. IEEE Trans. Energy Convers. 2000, 15, 407–412. [Google Scholar] [CrossRef]
- Hwang, S.-M.; Eom, J.-B.; Hwang, G.B.; Jeong, W.-B.; Jung, J.-H. Cogging torque and acoustic noise reduction in permanent magnet motors by teeth pairing. IEEE Trans. Magn. 2000, 36, 3144–3146. [Google Scholar] [CrossRef]
- Wang, D.; Wang, X.; Qiao, D.; Pei, Y.; Jung, S.Y. Reducing cogging torque in surface-mounted permanent-magnet motors by nonuniformly distributed teeth method. IEEE Trans. Magn. 2011, 47, 2231–2239. [Google Scholar] [CrossRef]
- Li, T.; Slemon, G. Reduction of cogging torque in permanent magnet motors. IEEE Trans. Magn. 1988, 24, 2901–2903. [Google Scholar]
- Pang, Y.; Zhu, Z.Q.; Feng, Z.J. Cogging torque in cost effective surface mounted permanent magnet machines. IEEE Trans. Magn. 2011, 47, 2269–2276. [Google Scholar] [CrossRef]
- Wang, D.; Wang, X.; Jung, S.Y. Cogging torque minimization and torque ripple suppression in surface-mounted permanent magnet synchronous machines using different magnet widths. IEEE Trans. Magn. 2013, 49, 2295–2298. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X.; Zhang, R.; Ding, T.; Tang, R. The optimization of pole arc coefficient to reduce cogging torque in surface-mounted permanent magnet motors. IEEE Trans. Magn. 2006, 42, 1135–1138. [Google Scholar] [CrossRef]
- Lateb, R.; Takorabet, N.; Meibody-Tabar, F. Effect of magnet segmentation on the cogging torque in surface-mounted permanent-magnet motors. IEEE Trans. Magn. 2006, 42, 442–445. [Google Scholar] [CrossRef]
- Jin, M.-J.; Wang, Y.; Shen, J.-X.; Luk, P.C.-K.; Fei, W.-Z.; Wang, C.-F. Cogging torque suppression in a permanent-magnet flux-switching integrated-starter-generator. IET Electr. Power Appl. 2010, 4, 647–656. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension and Parameters | Quantities |
|---|---|
| Number of phases | 3 |
| Number of pole pairs | 6 |
| Stator outer radius (mm) | 33.5 |
| Rotor outer radius (mm) | 20.5 |
| Air gap length (mm) | 1 |
| Number of claw poles | 12 |
| Effective axial length (mm) | 54.56 |
| Pole arc of magnets and claw pole (mechanical degree) | 20 |
| Magnetization direction | Radial |
| Slot factor | 0.43 |
| Number of turns | 256 |
| PM materials | NdFeB, N30M |
| Stator materials | SOMALOY 500TM |
| Item | Fpm (mWb) | Tcog (Nm) | Tcog/Φpm |
|---|---|---|---|
| Unequal width claw pole | 0.510 | 0.012 | 0.0235 |
| Two-step magnet skewing | 0.326 | 0.042 | 0.1288 |
| Three-step magnet skewing | 0.329 | 0.012 | 0.0365 |
| Herringbone magnet skewing | 0.327 | 0.025 | 0.0765 |
| Magnet shifting | 0.331 | 0.021 | 0.0634 |
| Claw pole dimensions | 0.479 | 0.032 | 0.0668 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Lu, J.; Wang, Y.; Lei, G.; Zhu, J.; Guo, Y. Techniques for Reduction of the Cogging Torque in Claw Pole Machines with SMC Cores. Energies 2017, 10, 1541. https://doi.org/10.3390/en10101541
Liu C, Lu J, Wang Y, Lei G, Zhu J, Guo Y. Techniques for Reduction of the Cogging Torque in Claw Pole Machines with SMC Cores. Energies. 2017; 10(10):1541. https://doi.org/10.3390/en10101541
Chicago/Turabian StyleLiu, Chengcheng, Jiawei Lu, Youhua Wang, Gang Lei, Jianguo Zhu, and Youguang Guo. 2017. "Techniques for Reduction of the Cogging Torque in Claw Pole Machines with SMC Cores" Energies 10, no. 10: 1541. https://doi.org/10.3390/en10101541