Use of Naturally Available Reference Targets to Calibrate Airborne Laser Scanning Intensity Data

Abstract
:1. Introduction
2. Study area and data
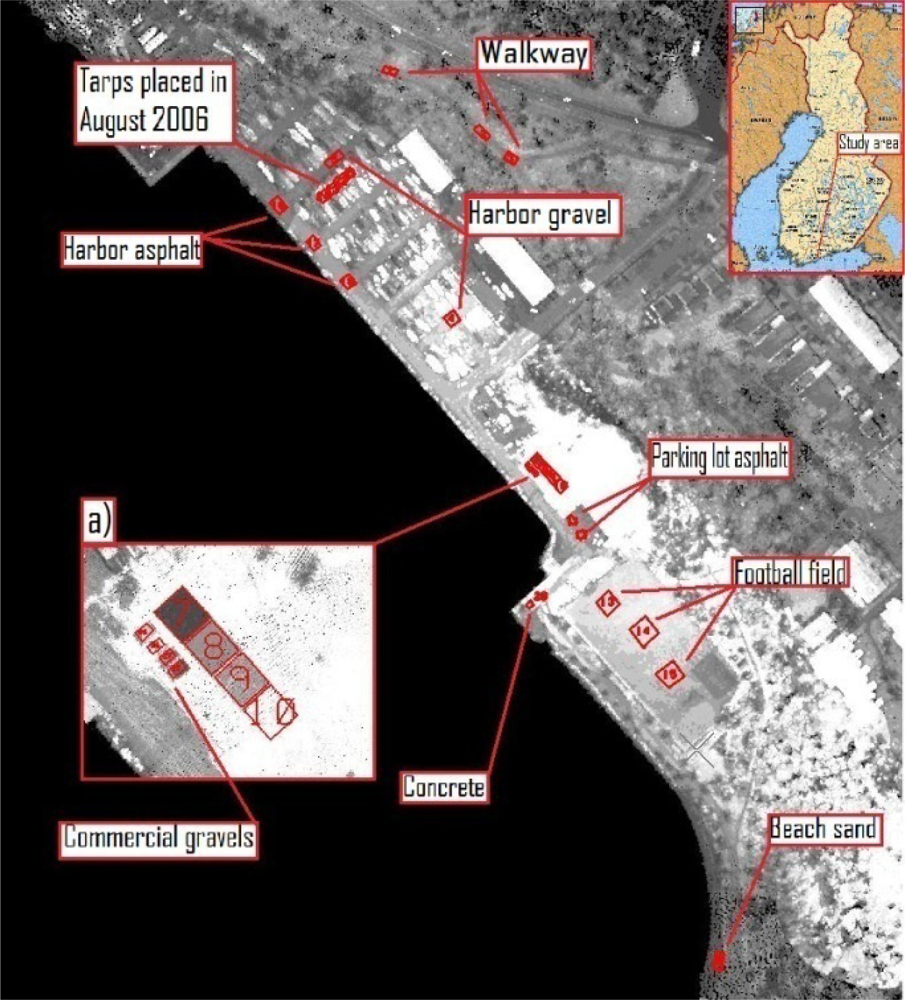
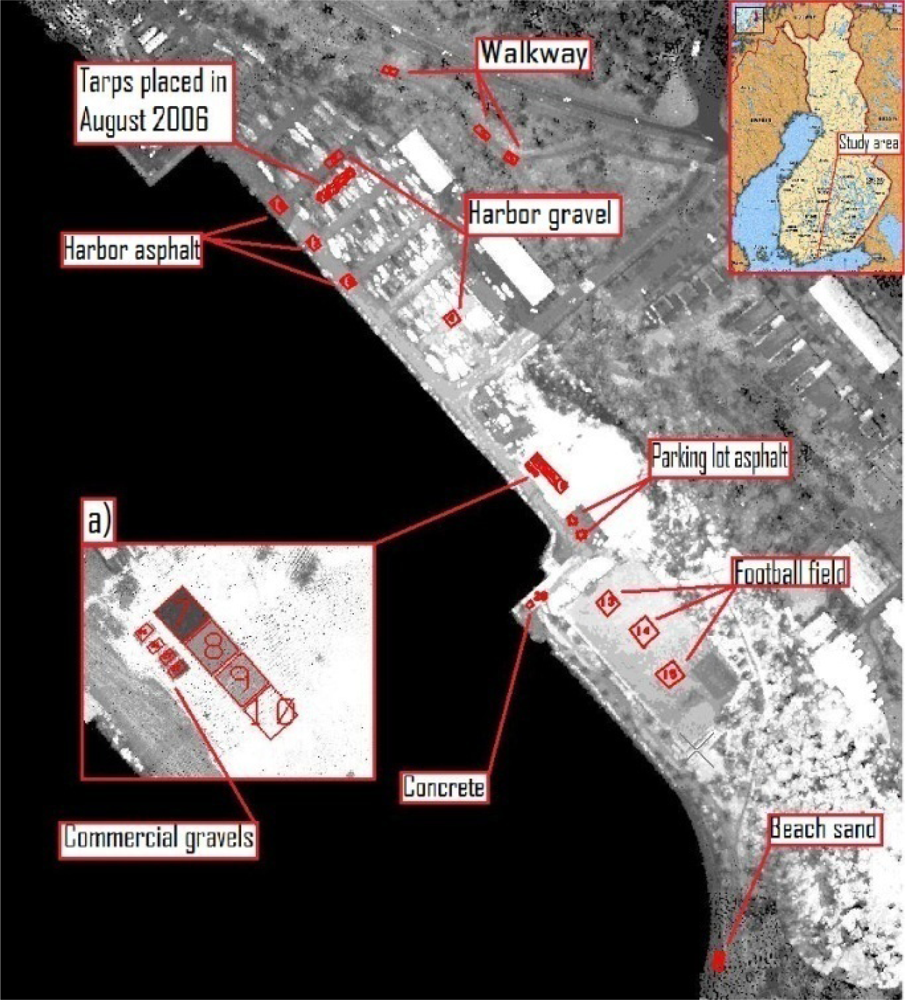
2.1. Study area and airborne laser scanning campaigns
2.2. Samples and reference data
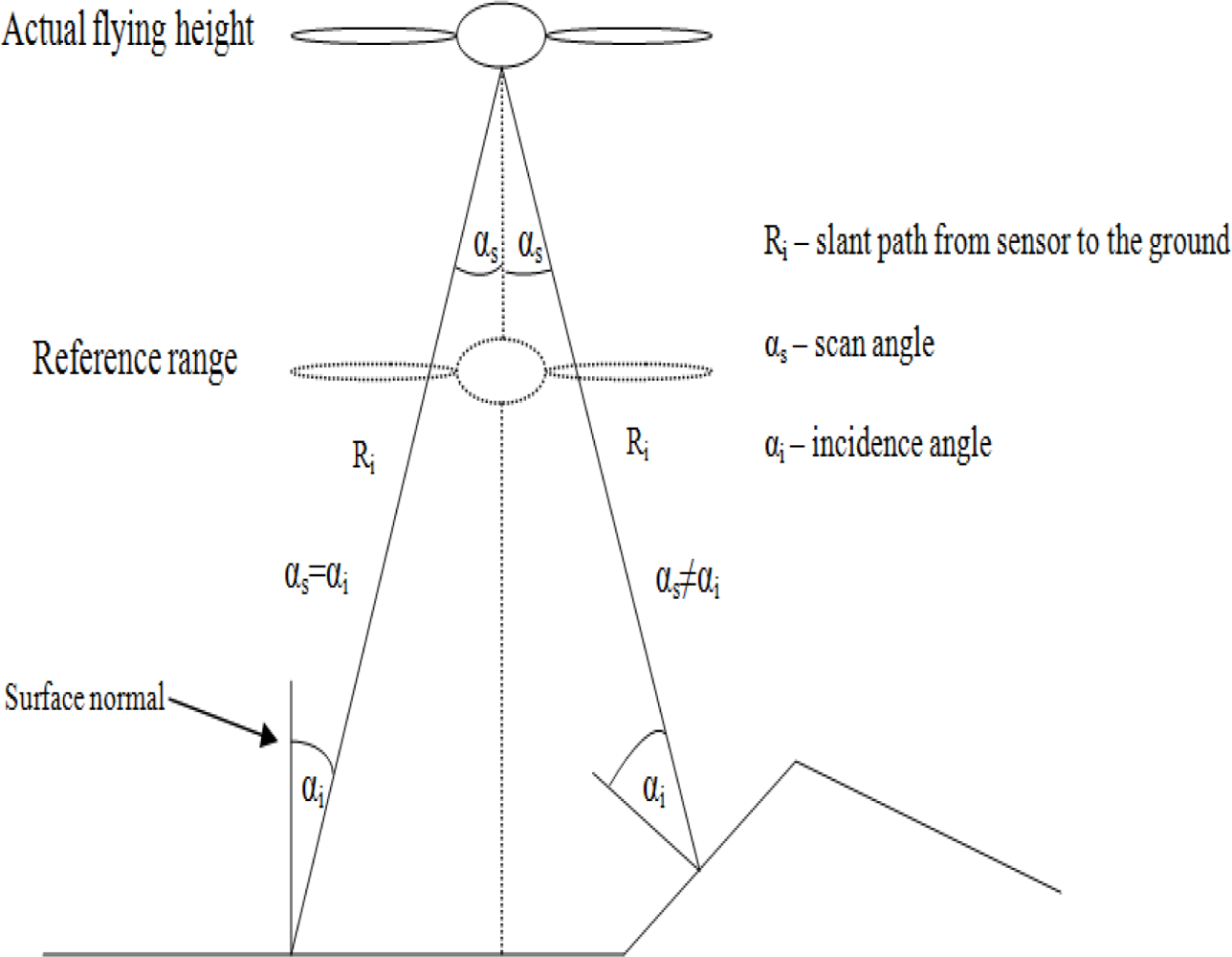
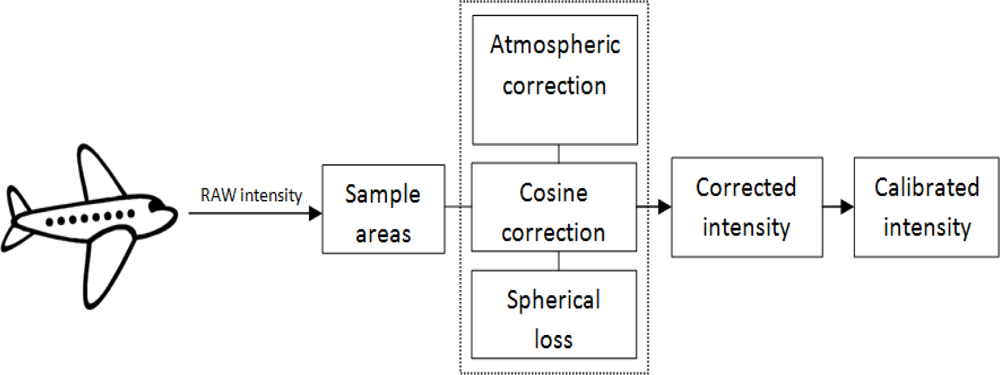
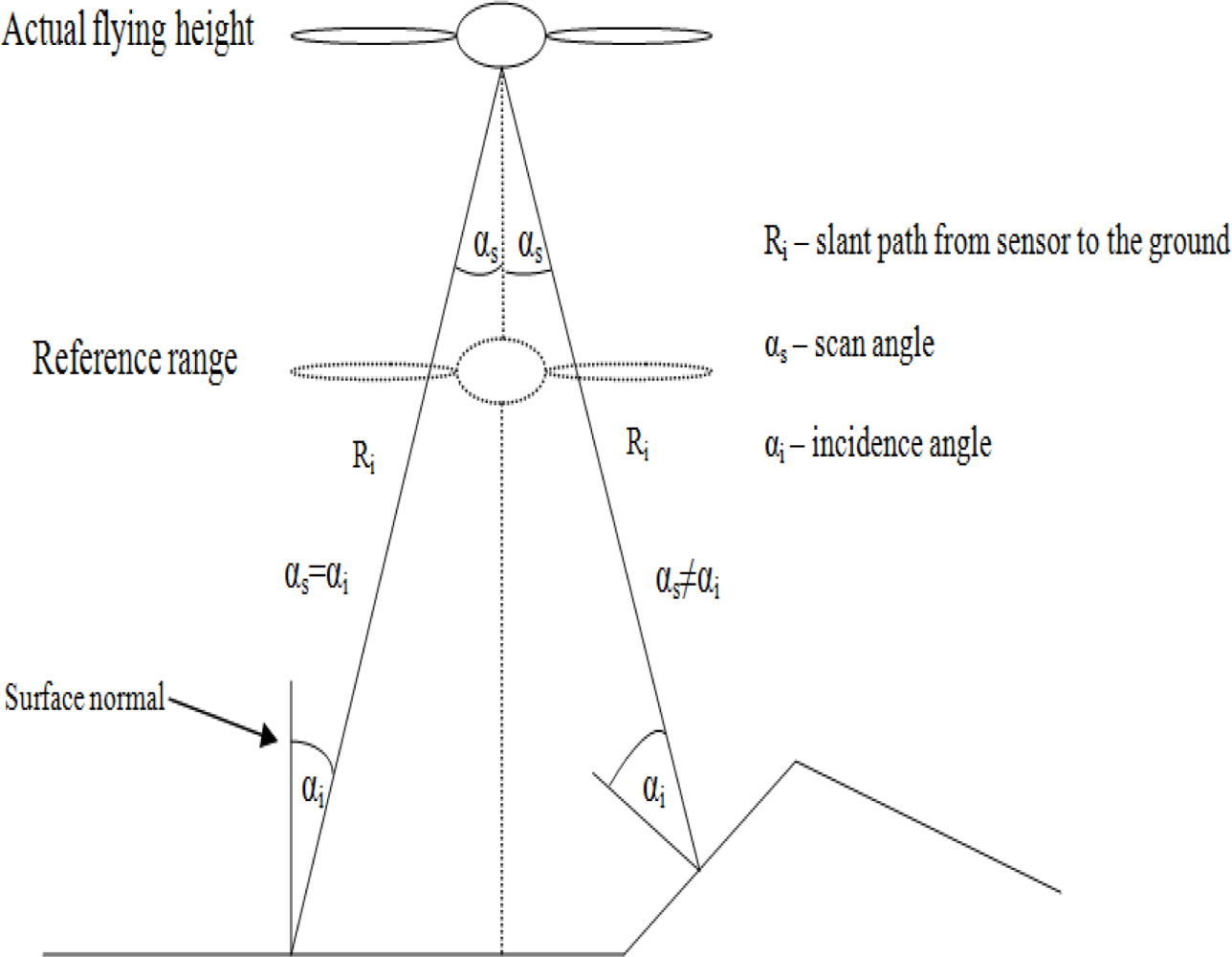
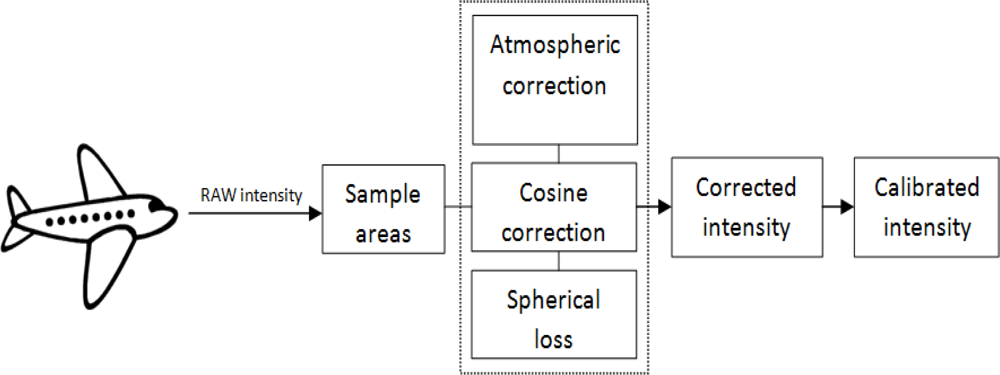
3. Airborne laser scanner intensity data correction
4. Results
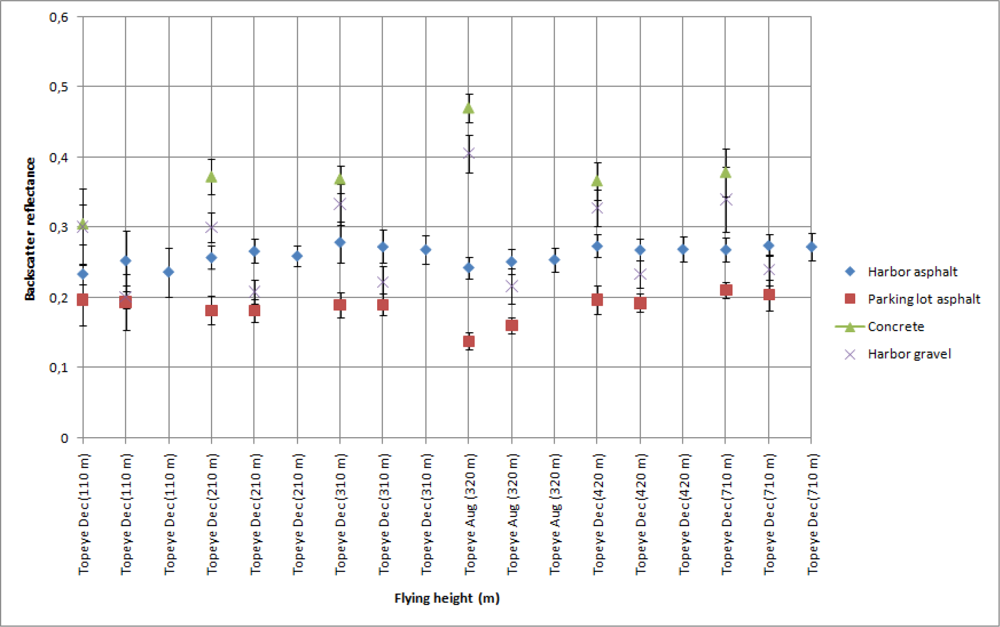
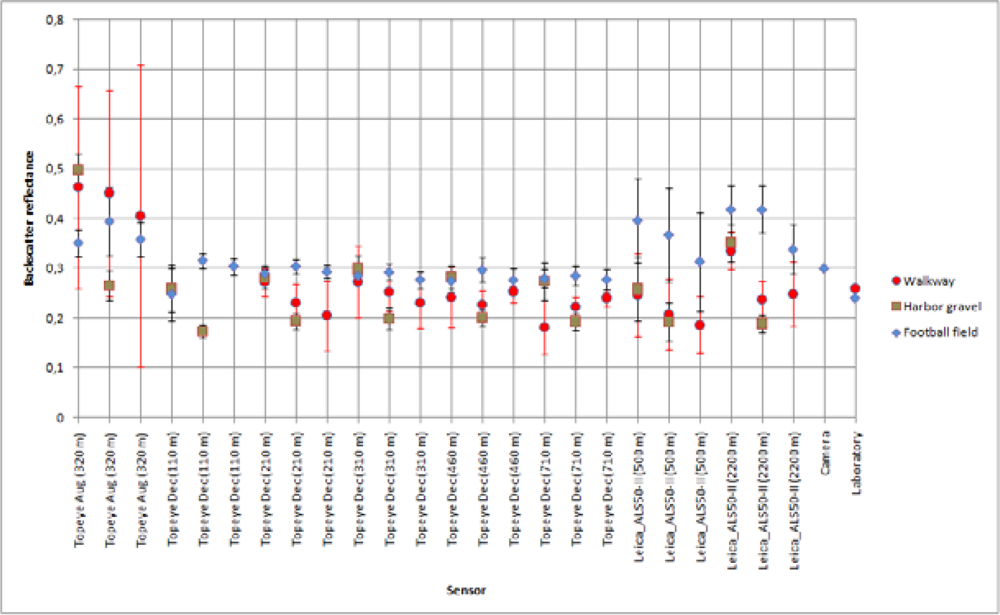
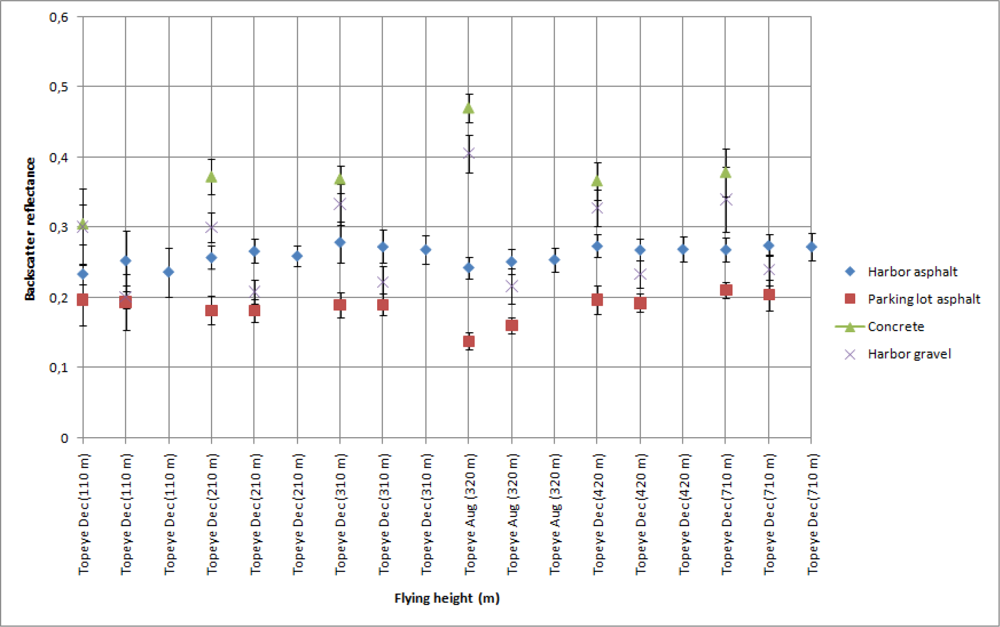
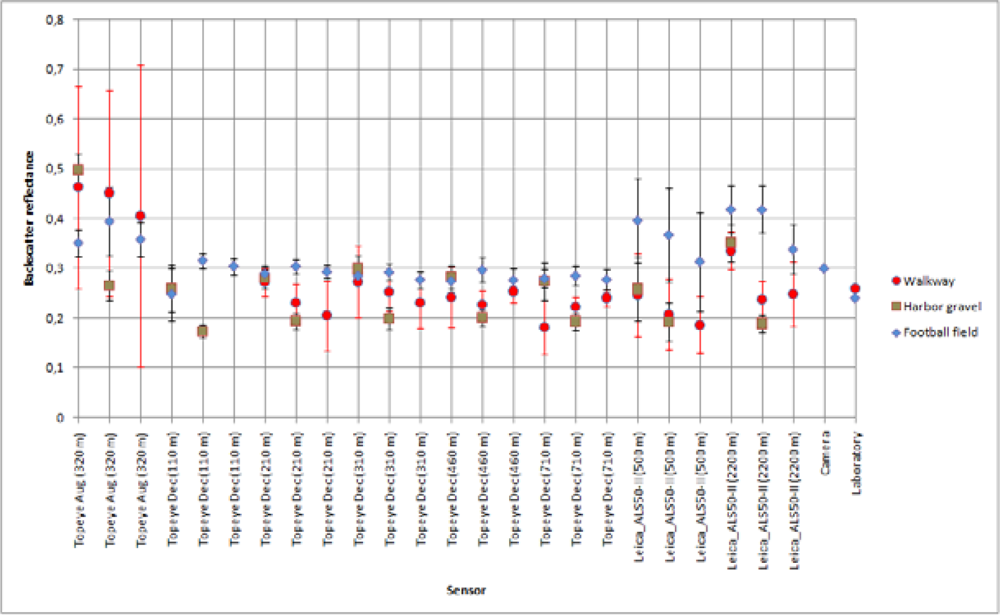
4.1. Stability study of natural brightness targets
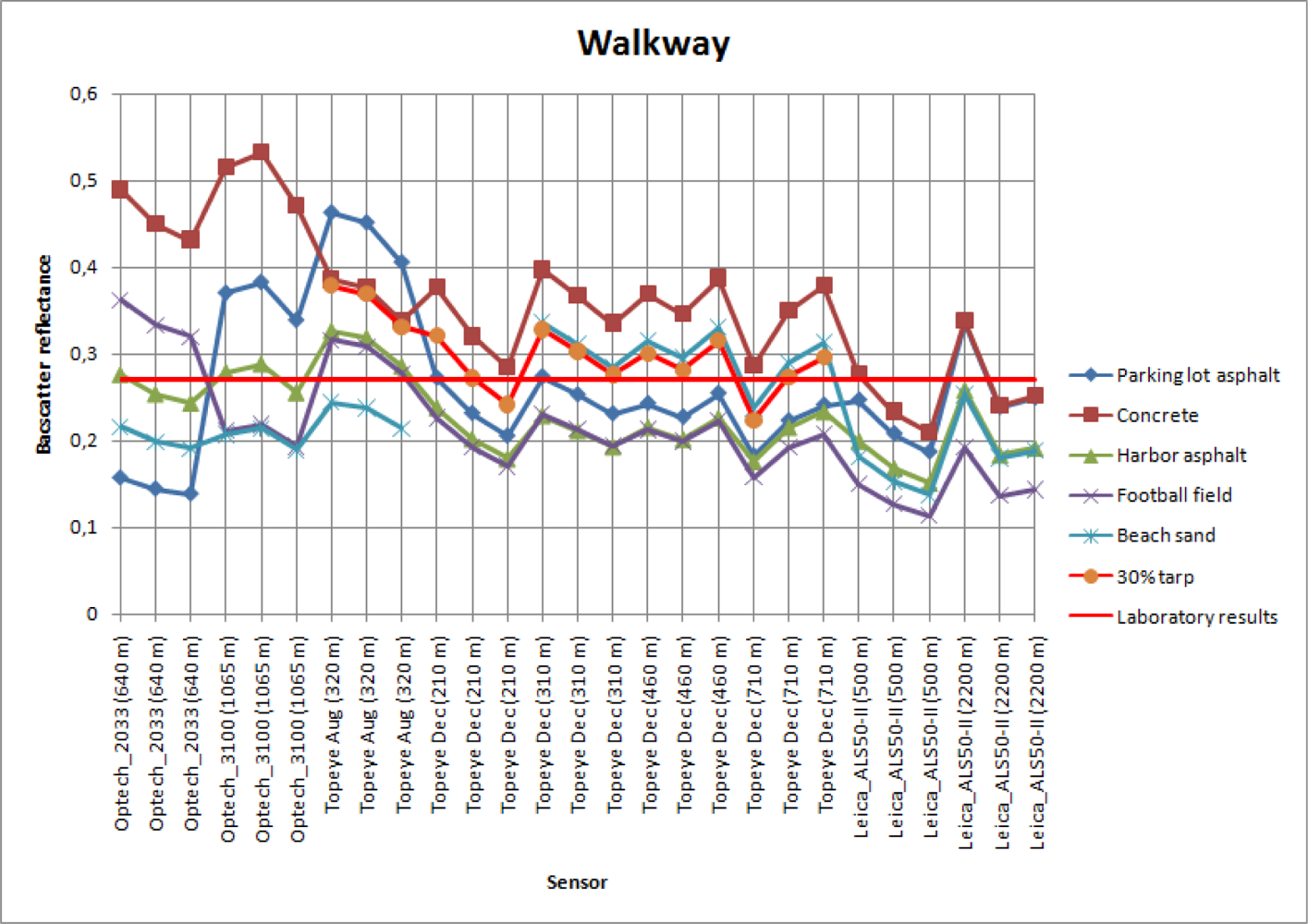
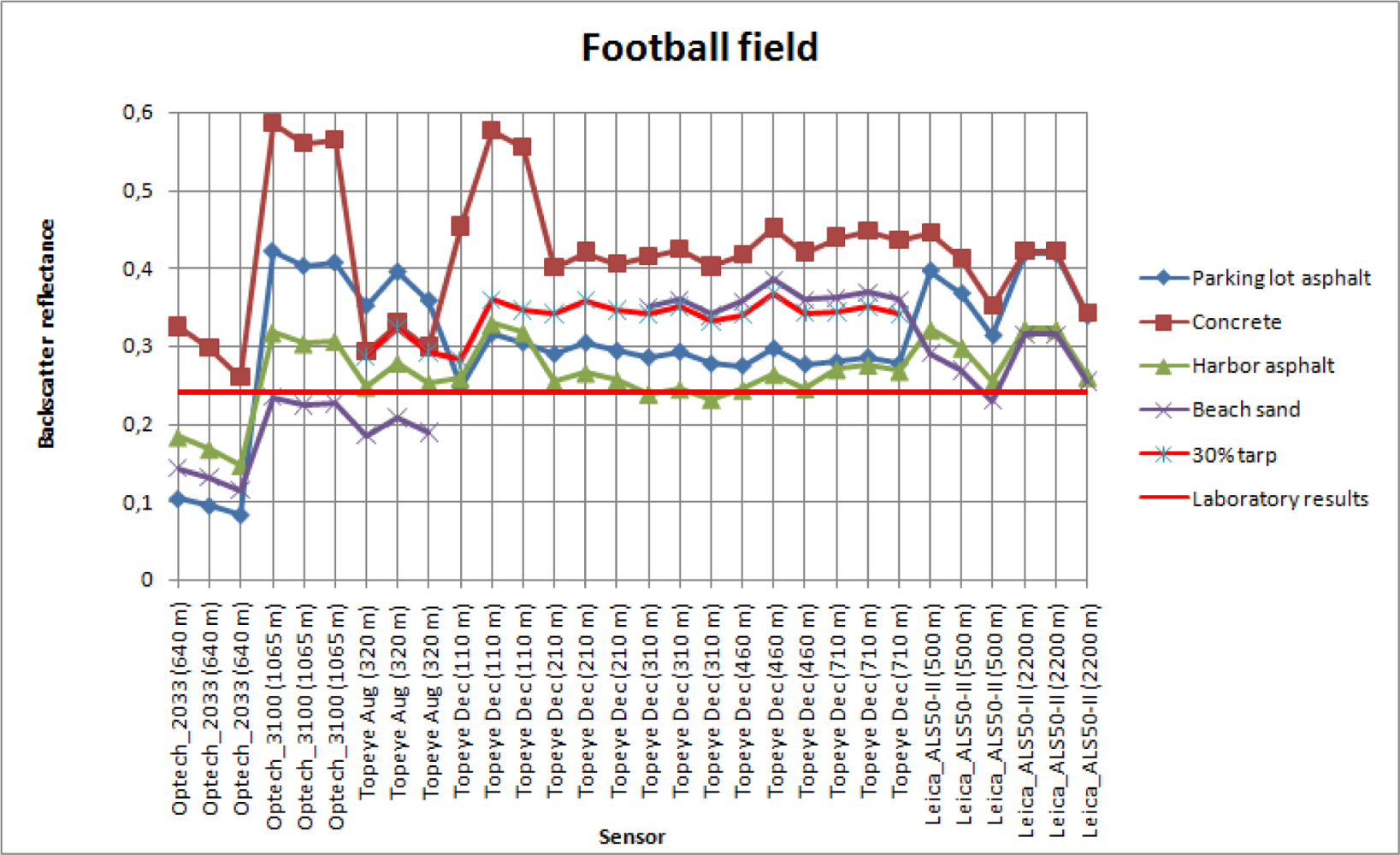
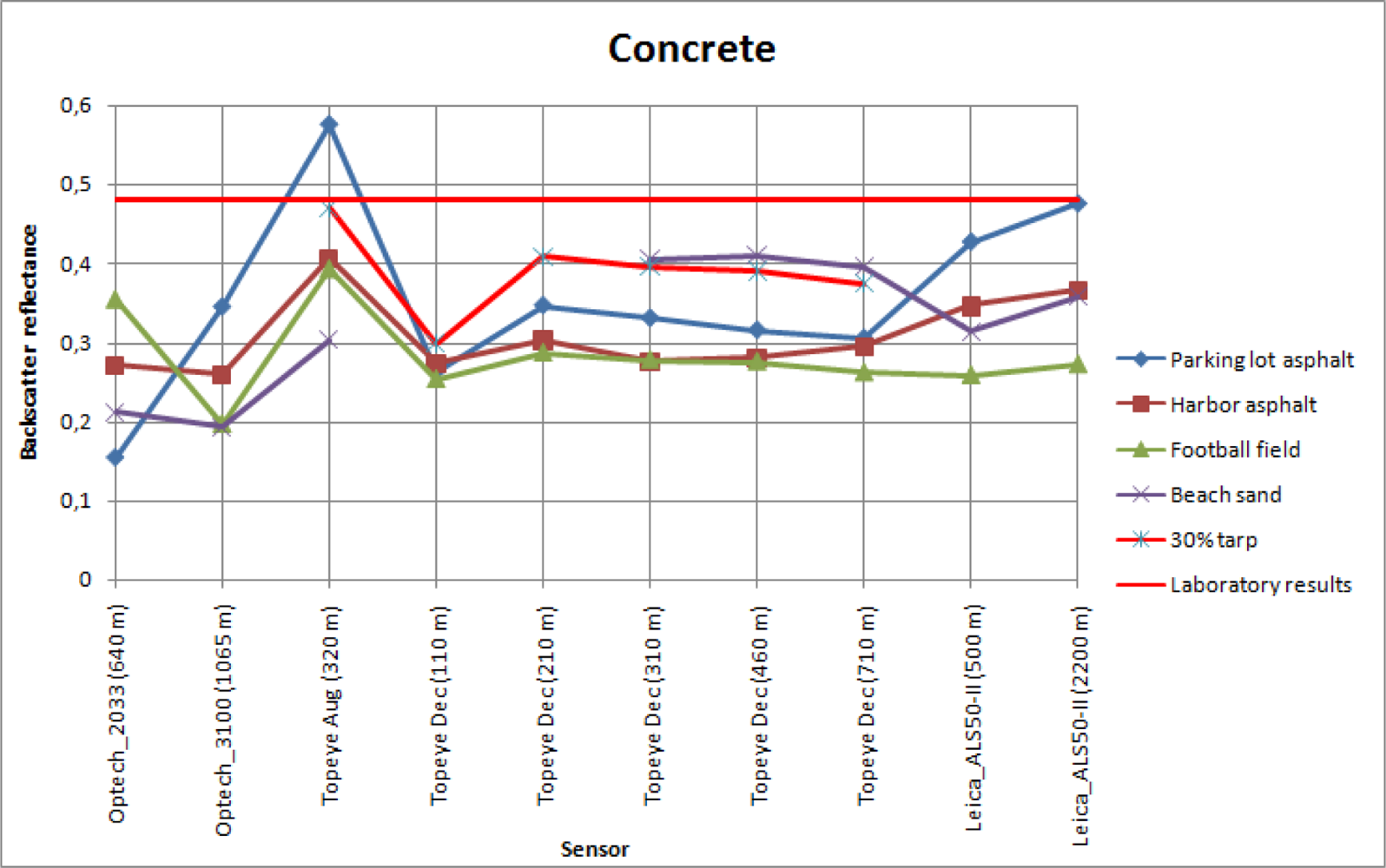
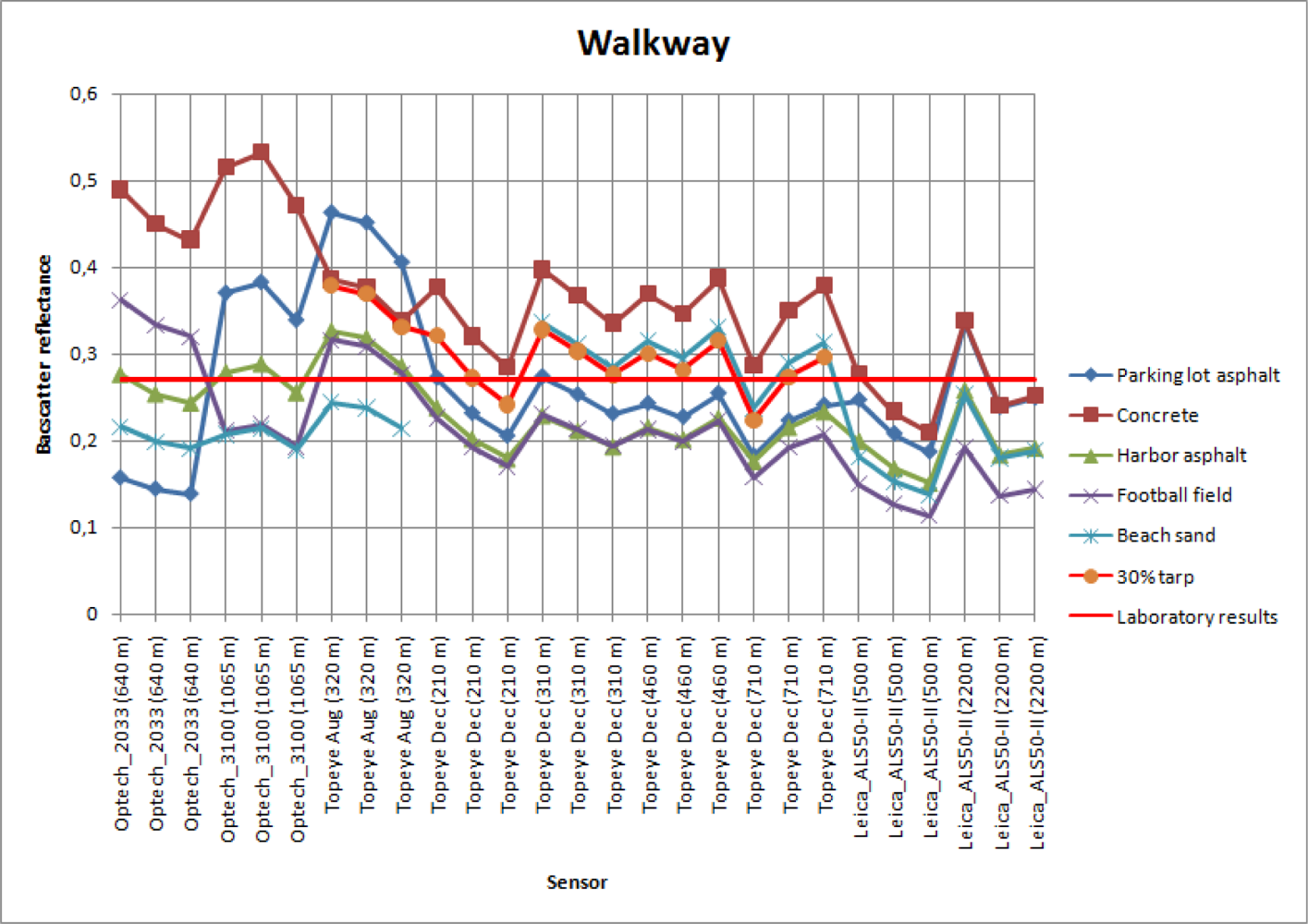
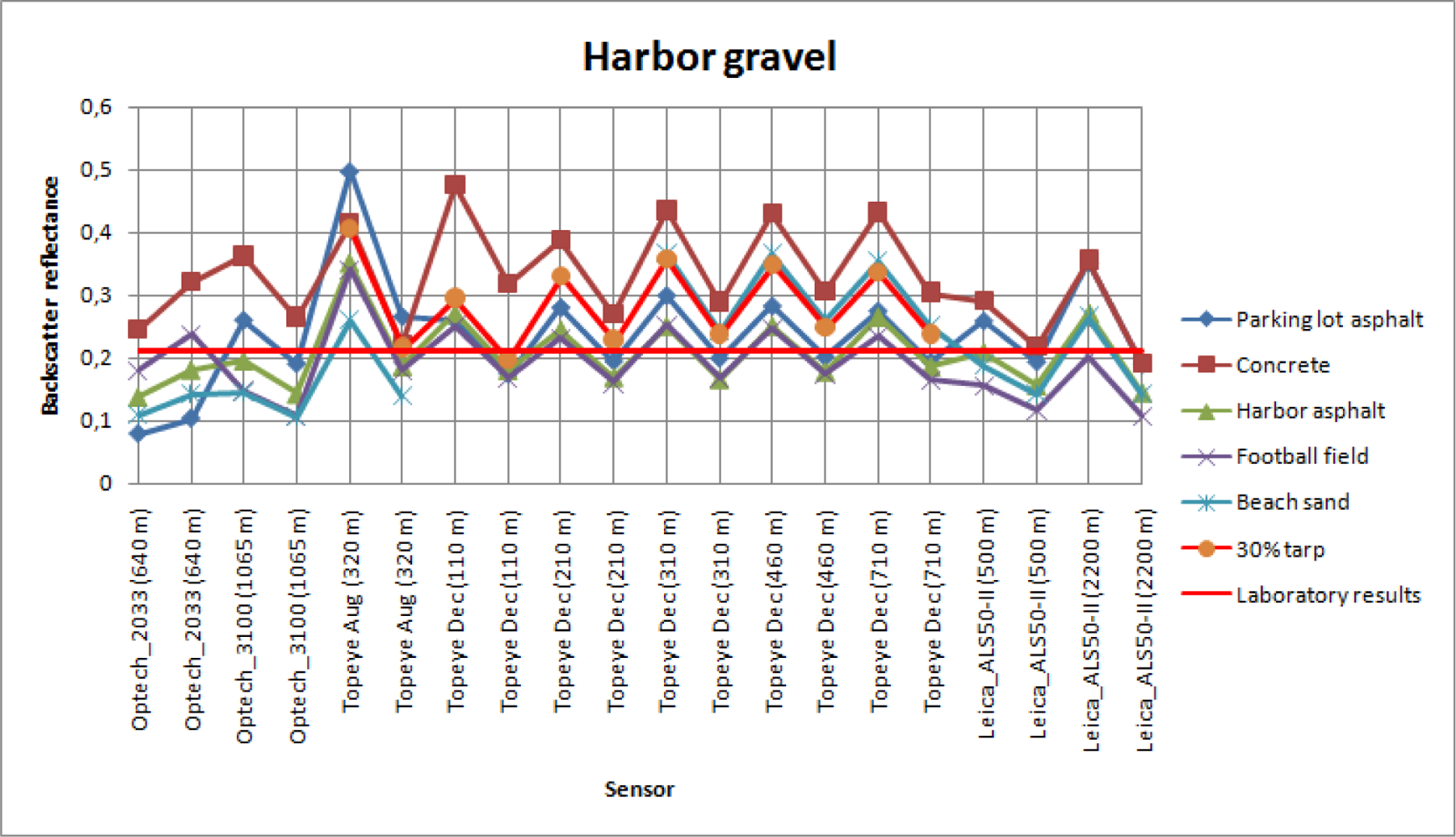
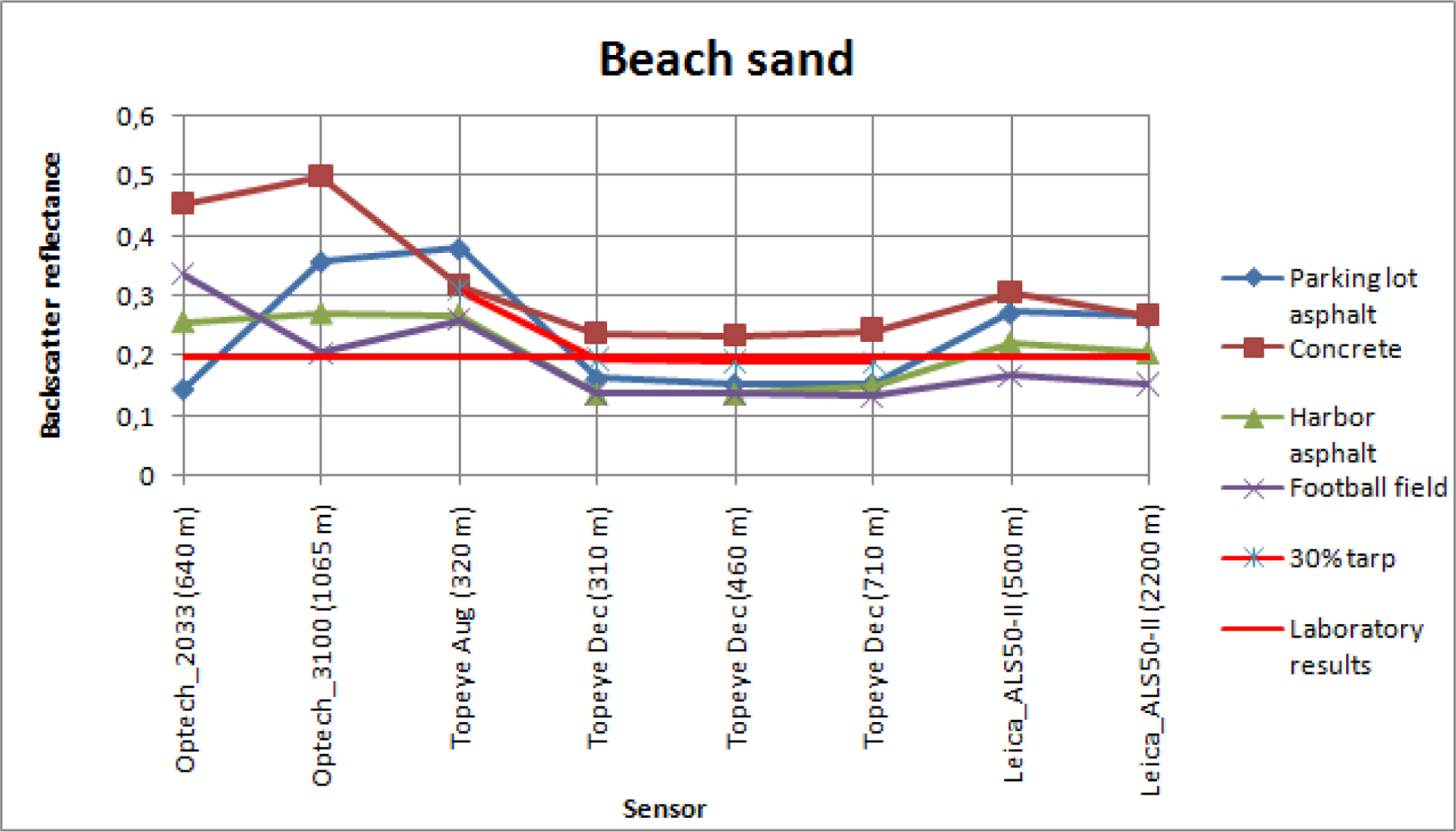
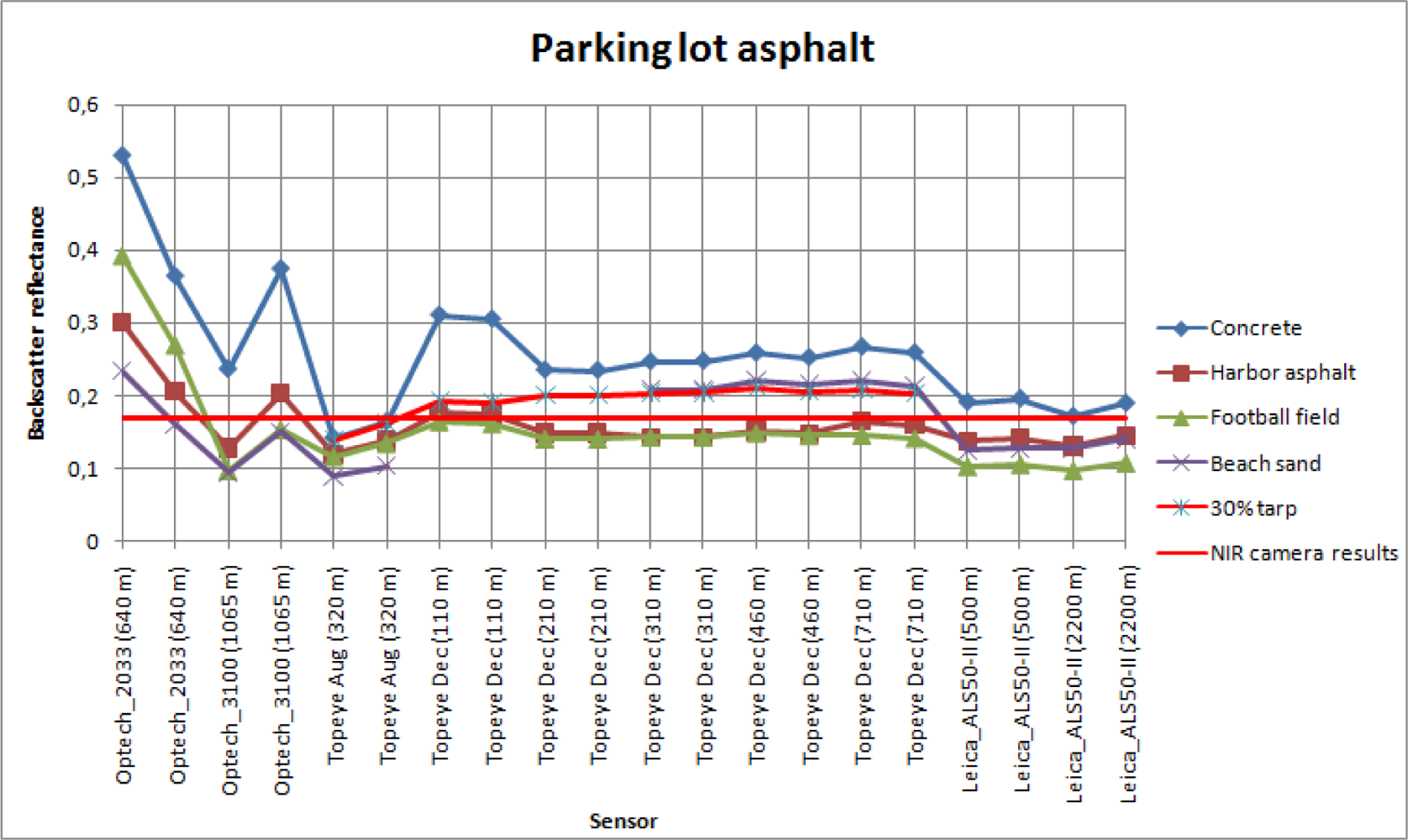
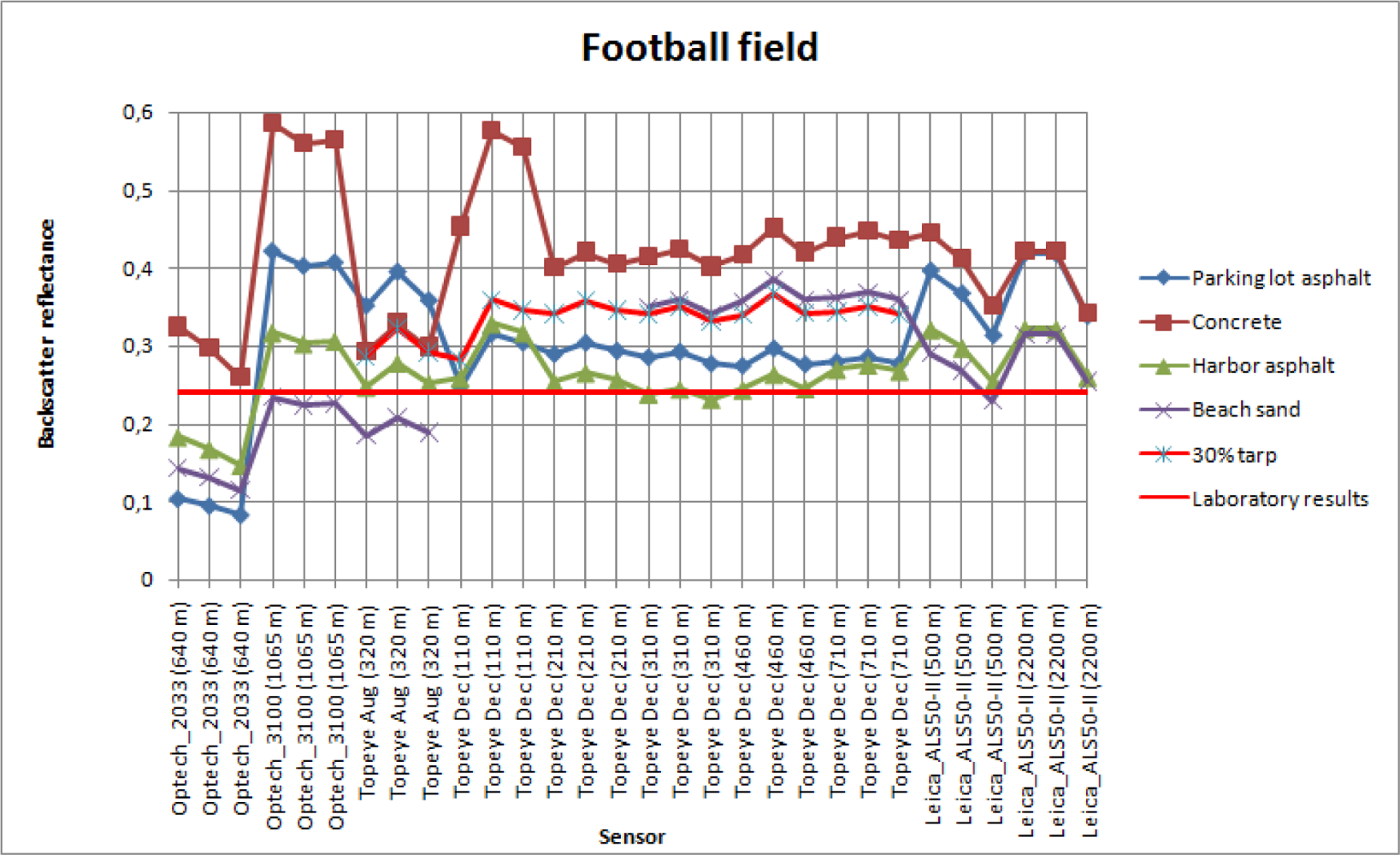
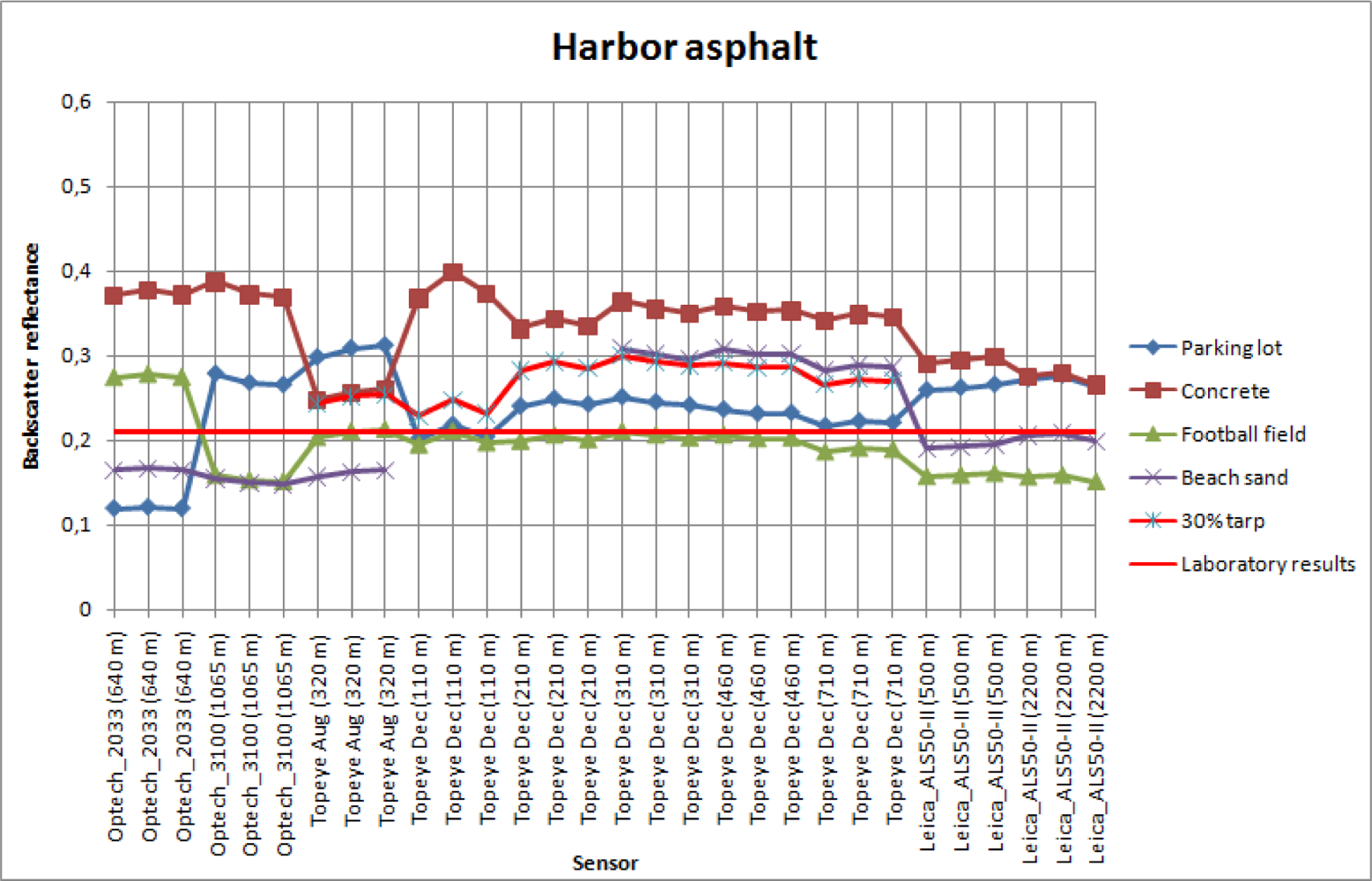
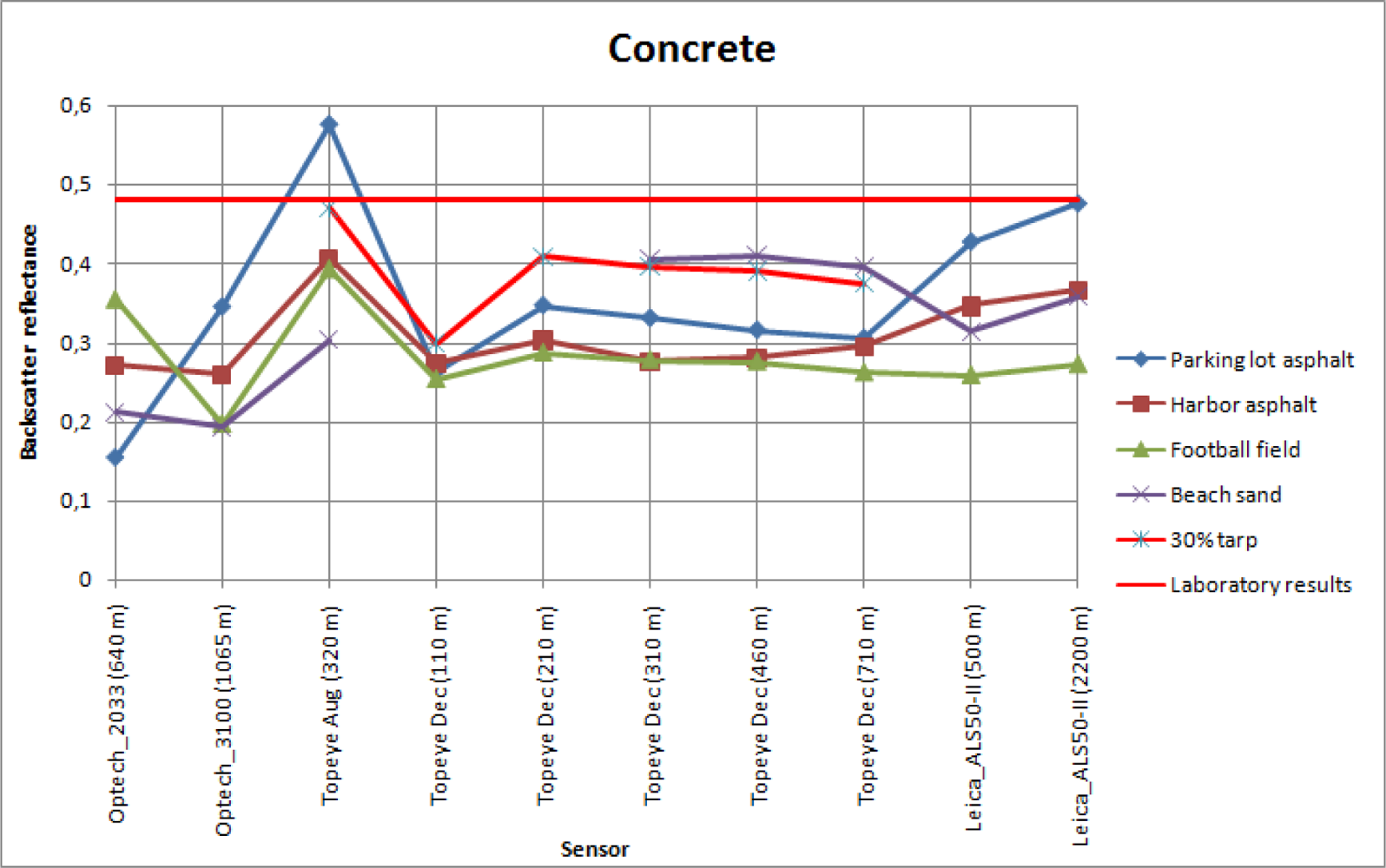
4.2. Using natural targets in reflectance calibration
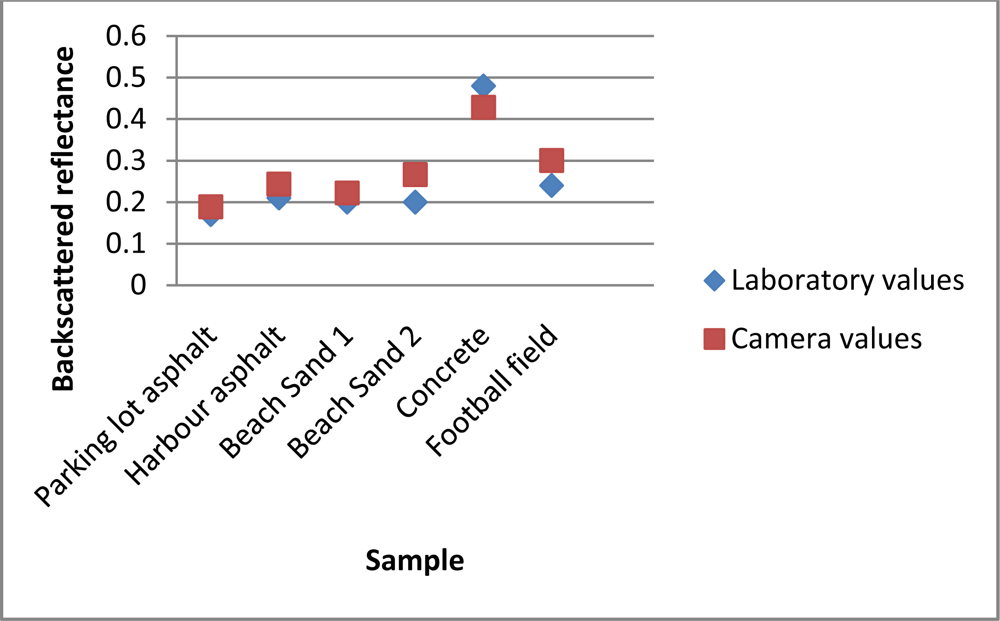
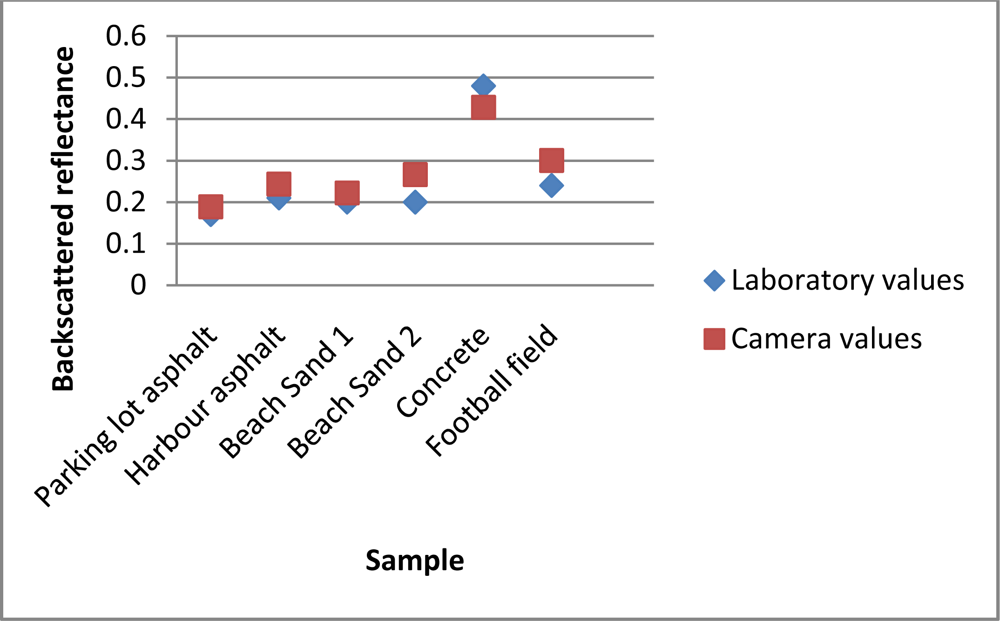
4.3. Digital camera results
5. Conclusions
Acknowledgments
References and Notes
- Chasmer, L.; Hopkinson, C.; Smith, B.; Treitz, P. Examining the influence of laser pulse repetition frequencies on conifer forest canopy returns. Photogramm. Eng. Remote Sens 2006, 72, 1359–1367. [Google Scholar]
- Wang, C. K.; Philpot, W. D. Using airborne bathymetric lidar to detect bottom type variation in shallow waters. Remote Sens. Environ 2007, 106, 123–135. [Google Scholar]
- Coren, F.; Sterzai, P. Radiometric correction in laser scanning. Int. J. Remote Sen 2006, 27, 3097–3104. [Google Scholar]
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS J. Photogramm. Remote Sens 2006, 60, 100–112. [Google Scholar]
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driver approaches. ISPRS J. Photogramm. Remote Sens 2007, 62, 415–433. [Google Scholar]
- Ahokas, E.; Kaasalainen, S.; Hyyppä, J.; Suomalainen, J. Calibration of the Optech ALTM 3100 laser scanner intensity data using brightness targets. Proc. ISPRS Commission I Symp., Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2006, 36(A1). CD-ROM.. [Google Scholar]
- Kaasalainen, S.; Hyyppä, J.; Litkey, P.; Hyyppä, H.; Ahokas, E.; Kukko, A.; Kaartinen, H. Radiometric calibration of ALS intensity. Int. Arch. Photogramm. Remote Sens 2007, 36, 201–205. [Google Scholar]
- Kaasalainen, S.; Ahokas, E.; Hyyppä, J.; Suomalainen, J. Study of Surface Brightness From Backscattered Laser Intensity: Calibration of Laser Data. IEEE Geosci. Remote Sens. Lett 2005, 2, 255–259. [Google Scholar]
- Kaasalainen, S.; Kukko, A.; Lindroos, T.; Litkey, P.; Kaartinen, H.; Hyyppä, J.; Ahokas, E. Brightness Measurements and Calibration With Airborne and Terrestrial Laser Scanners. IEEE Trans. Geosci. Remote Sens 2008, 46, 528–534. [Google Scholar]
- Kaasalainen, S.; Hyyppä, H.; Kukko, A.; Litkey, P.; Ahokas, E.; Hyyppä, J.; Lehner, H.; Jaakkola, A.; Suomalainen, J.; Akujärvi, A.; Kaasalainen, M.; Pyysalo, U. Radiometric Calibration of LIDAR Intensity With Commercially Available Reference Targets. IEEE Trans. Geosci. Remote Sens 2009, 47, 588–598. [Google Scholar]
- Boyd, D.S.; Hill, R.A. Validation of airborne lidar intensity values from a forested landscape using HYMAP data: preliminary analyses. Int. Arch. Photogramm. Remote Sens 2007, 36, 71–76. [Google Scholar]
- Hopkinson, C.; Chasmer, L. Testing LiDAR models for fractional cover across multiple forest ecozones. Remote Sens. Environ 2009, 113, 275–288. [Google Scholar]
- Næsset, E. Assessing sensor effects and effects of leaf-off and leaf-on canopy conditions on biophysical stand properties derived from small-footprint airborne laser data. Remote Sens. Environ 2005, 98, 356–370. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Scanner | Wavelength, nm | Flying altitude (AGL), m | Average point density, pts/m2 | Laser footprint size on the ground, m |
|---|---|---|---|---|---|
| Jun. 29, 2004 | Optech ALTM 2033 | 1064 | 640 | 9.2 | 0.13 |
| Jul. 12, 2005 | Optech ALTM 3100 | 1064 | 1065 | 7.3 | 0.32 |
| Aug. 31, 2006 | Topeye MK-II | 1064 | 320 | 13.7 | 0.32 |
| Dec. 18, 2006 | Topeye MK-II | 1064 | 110; 210; 310; 460; 710 | 63.5; 17.5; 16.3; 6.6; 3.5 | 0.11; 0.21; 0.31; 0.46; 0.71 |
| Apr. 26, 2007 | Leica ALS50-II | 1064 | 500; 2200 | 5.5; 0.5 | 0.11; 0.48 |
| Sample | Flying altitude AGL, m Number of points collected | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Topeye MK-II December | Topeye MK-II August | Topeye MK-II December | Leica ALS50-II | Optech ALTM 2033 | Topeye MK-II December | Optech ALTM 3100 | Leica ALS50-II | |||
| 110 | 210 | 310 | 320 | 460 | 500 | 640 | 710 | 1065 | 2200 | |
| Walkway | - | 543 | 1224 | 751 | 455 | 871 | 462 | 143 | 191 | 44 |
| Harbour gravel | 4535 | 785 | 1345 | 2236 | 488 | 600 | 484 | 87 | 273 | 47 |
| Beach sand | - | - | 172 | 856 | 42 | 332 | 228 | 54 | 63 | 23 |
| Parking lot asphalt | 1703 | 577 | 450 | 450 | 101 | 192 | 257 | 14 | 108 | 10 |
| Football field | 14424 | 5623 | 5294 | 4488 | 1747 | 2396 | 2272 | 787 | 1133 | 165 |
| Harbour asphalt | 3656 | 1409 | 1195 | 541 | 573 | 802 | 659 | 199 | 398 | 66 |
| Concrete | 489 | 64 | 195 | 34 | 19 | 51 | 44 | 4 | 6 | 4 |
| Tarp 5% | 1612 | 514 | 229 | - | 109 | - | - | 79 | - | - |
| Tarp 8% | - | - | - | 945 | - | - | - | - | - | - |
| Tarp 20% | 1426 | 510 | 240 | - | 48 | - | - | 53 | - | - |
| Tarp 26% | 1263 | 594 | 762 | 273 | 48 | - | - | 225 | - | - |
| Tarp 40% | 2816 | 443 | 671 | - | 53 | - | - | 121 | - | - |
| Tarp 50% | - | - | - | 297 | - | - | - | - | - | - |
| Tarp 70% | - | - | - | 234 | - | - | - | - | - | - |
| Gravel | 183 | 54 | 30 | - | 9 | - | - | 31 | - | - |
| Quartz | 138 | 60 | 23 | - | 5 | - | - | 26 | - | - |
| Diabase | 133 | 48 | 19 | - | 5 | - | - | 2 | - | - |
| LECA | 136 | 50 | 26 | - | 6 | - | - | 7 | - | - |
© 2009 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Vain, A.; Kaasalainen, S.; Pyysalo, U.; Krooks, A.; Litkey, P. Use of Naturally Available Reference Targets to Calibrate Airborne Laser Scanning Intensity Data. Sensors 2009, 9, 2780-2796. https://doi.org/10.3390/s90402780
Vain A, Kaasalainen S, Pyysalo U, Krooks A, Litkey P. Use of Naturally Available Reference Targets to Calibrate Airborne Laser Scanning Intensity Data. Sensors. 2009; 9(4):2780-2796. https://doi.org/10.3390/s90402780
Chicago/Turabian StyleVain, Ants, Sanna Kaasalainen, Ulla Pyysalo, Anssi Krooks, and Paula Litkey. 2009. "Use of Naturally Available Reference Targets to Calibrate Airborne Laser Scanning Intensity Data" Sensors 9, no. 4: 2780-2796. https://doi.org/10.3390/s90402780