New Passive Instruments Developed for Ocean Monitoring at the Remote Sensing Lab—Universitat Politècnica de Catalunya

 ,
,
Abstract
:1. Introduction: Principles of L-Band Microwave Radiometry and GNSS-R over the Ocean
2. Instrument Developments
- PAU/RAD: an L-band radiometer to measure the brightness temperature of the sea surface,
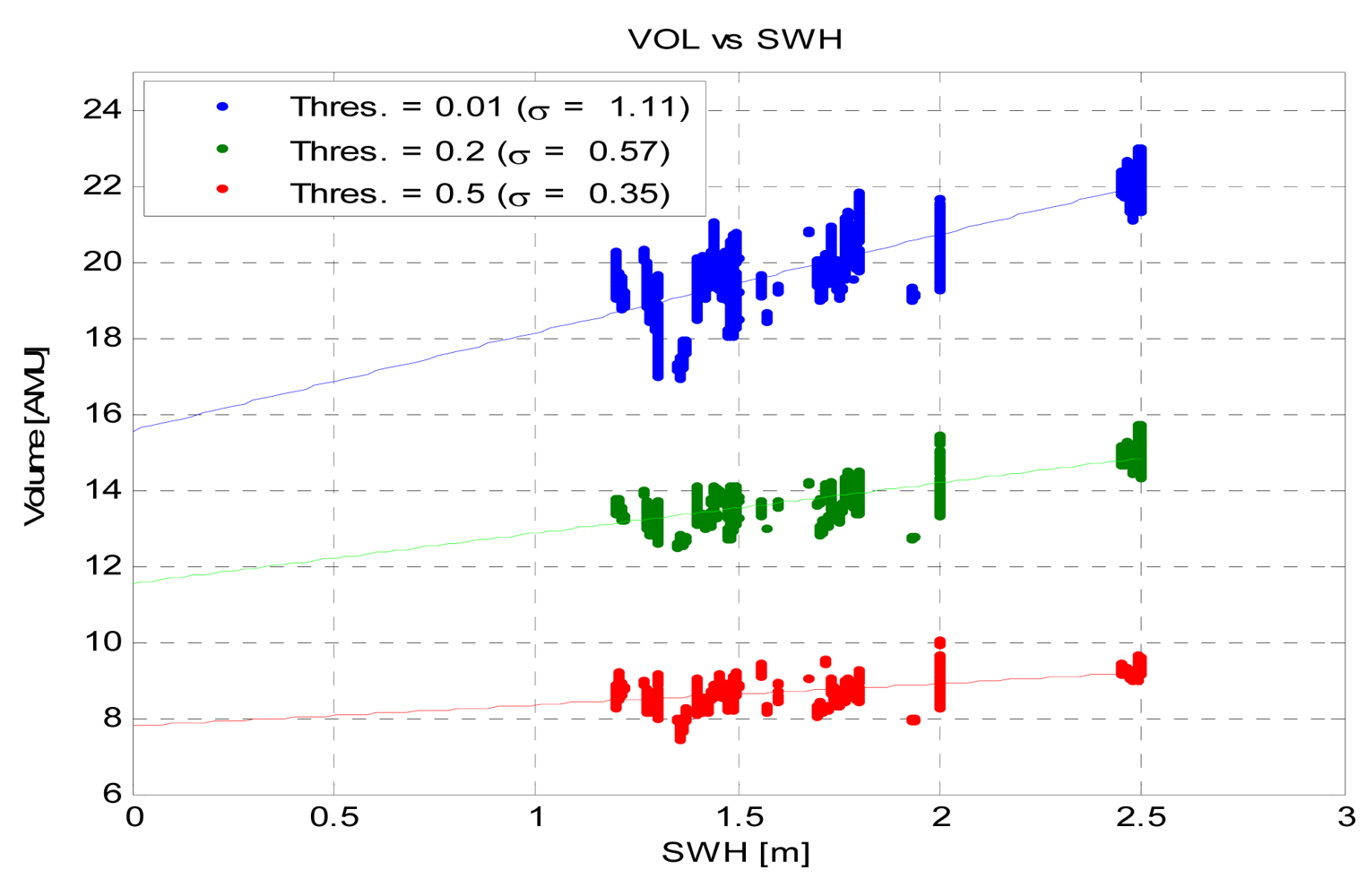
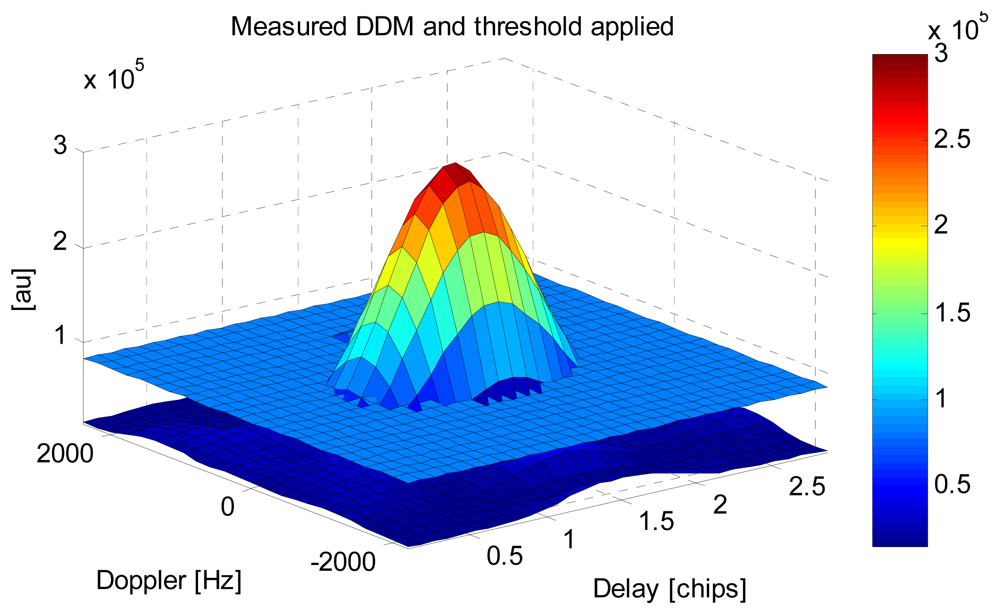
- PAU/GNSS-R: a GPS-reflectometer using the L1 C/A code to measure the sea state, and
- PAU/IR: two infrared radiometers to measure the sea surface temperature,
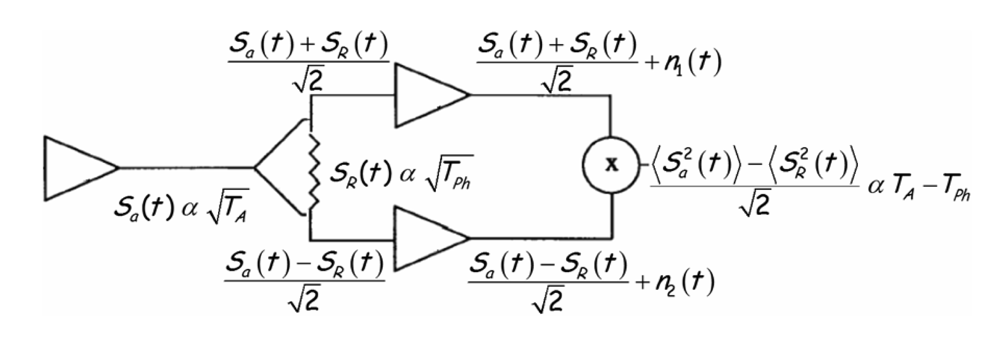
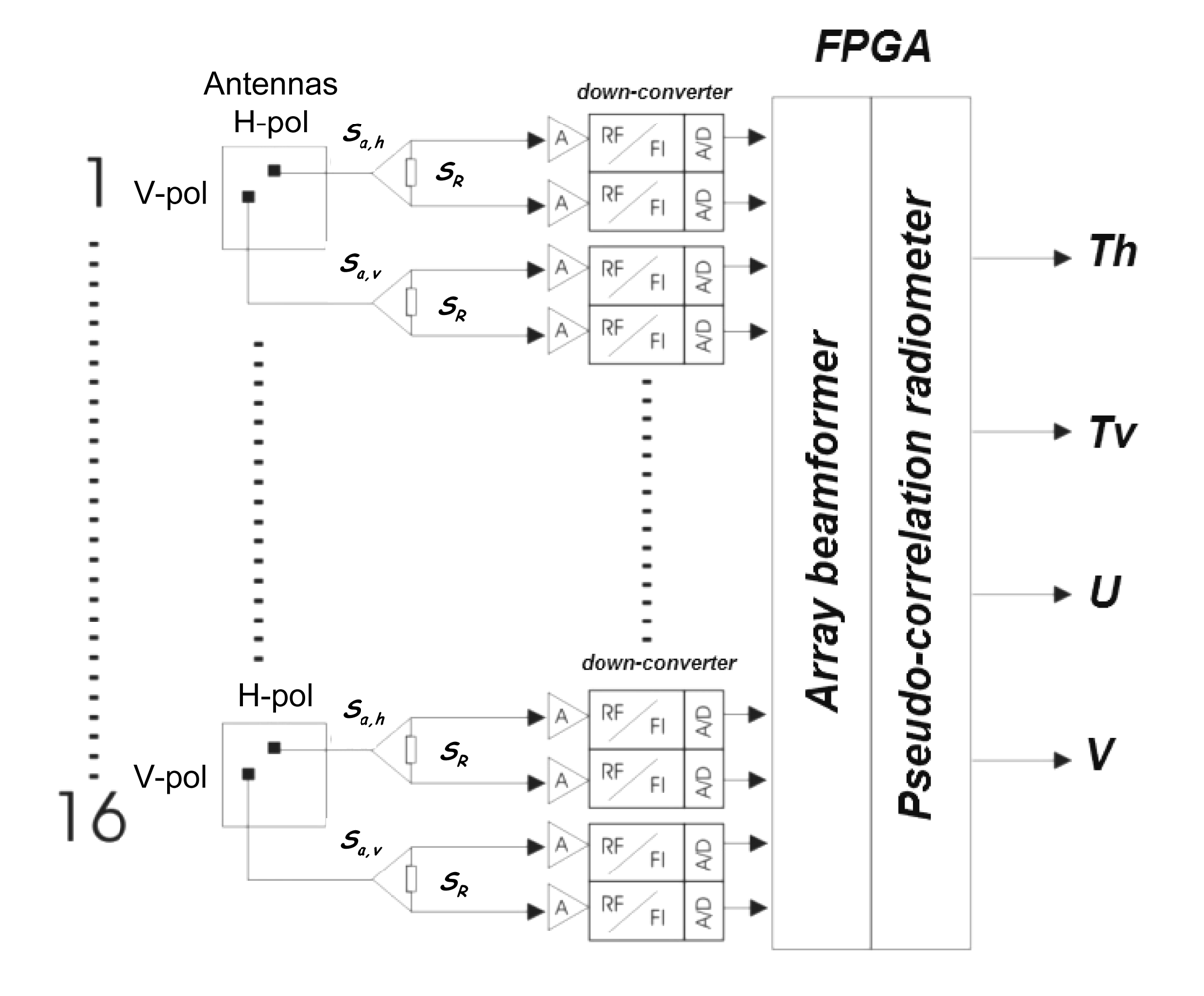
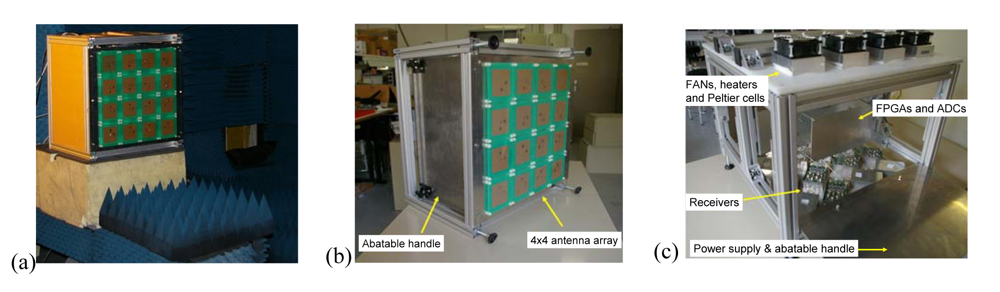
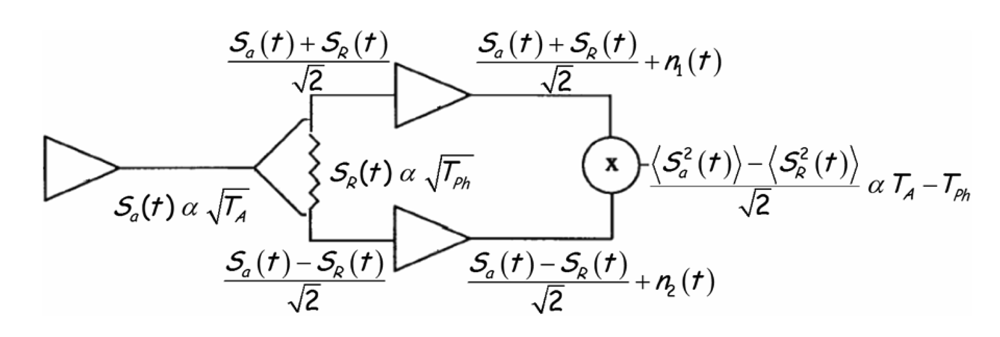
- PAU-Real Aperture instrument with a 4 × 4 element array with digital beamforming and polarization synthesis that uses of an innovative pseudo-correlation radiometer topology to avoid the classical input switch in a Dicke radiometer and
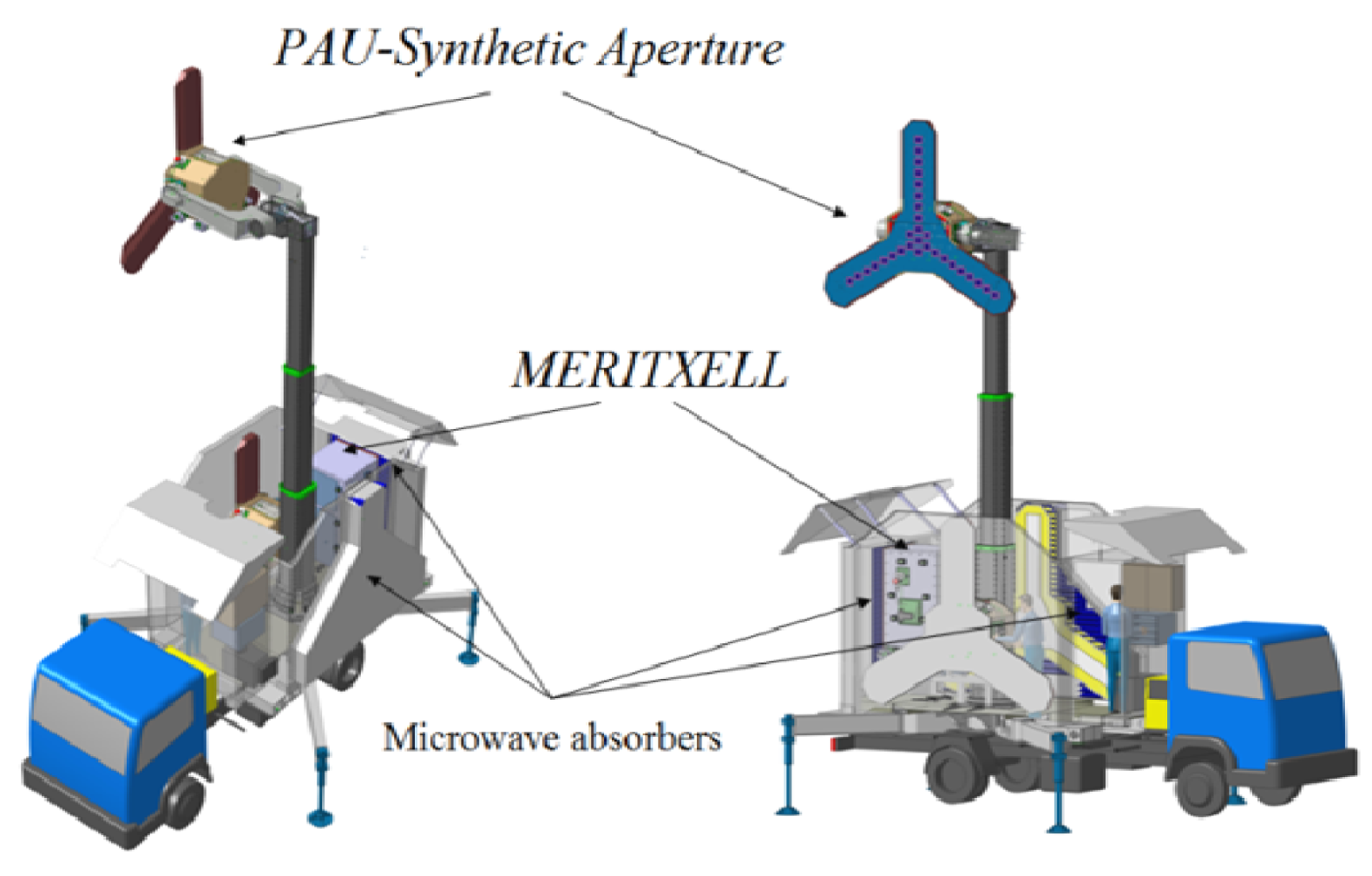
- PAU-Synthetic Aperture instrument, which is also used to test potential new technologically developments and algorithms for future SMOS missions.In addition to these two, and in order to advance the scientific studies relating the GNSS-R and radiometric observables other PAU demonstrators have been developed:
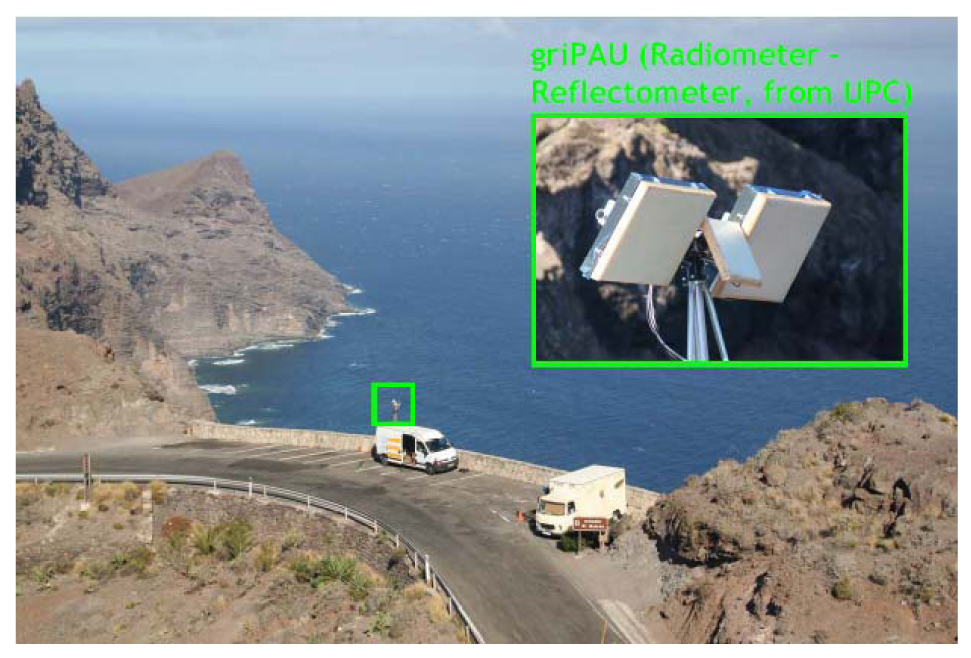
- PAU-OR with just one element for ground tests and algorithms development, and griPAU, an improved PAU-OR instruments fully automated,
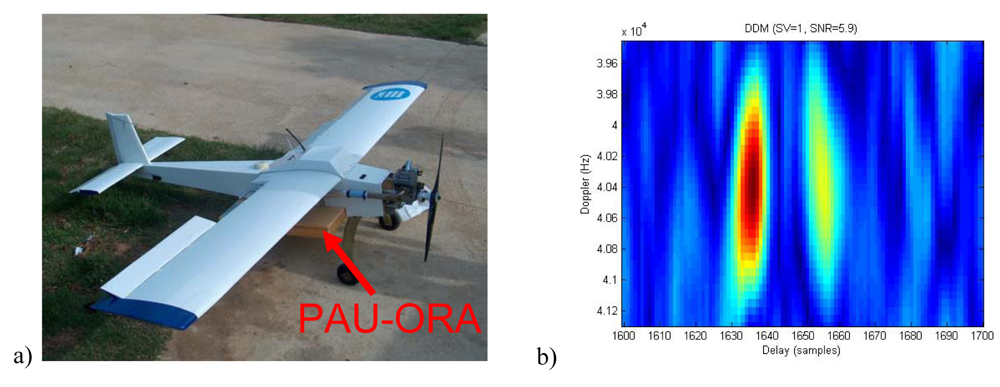
- PAU-ORA, a lighter version of PAU-OR for aircraft operations from a remote controlled plane, and
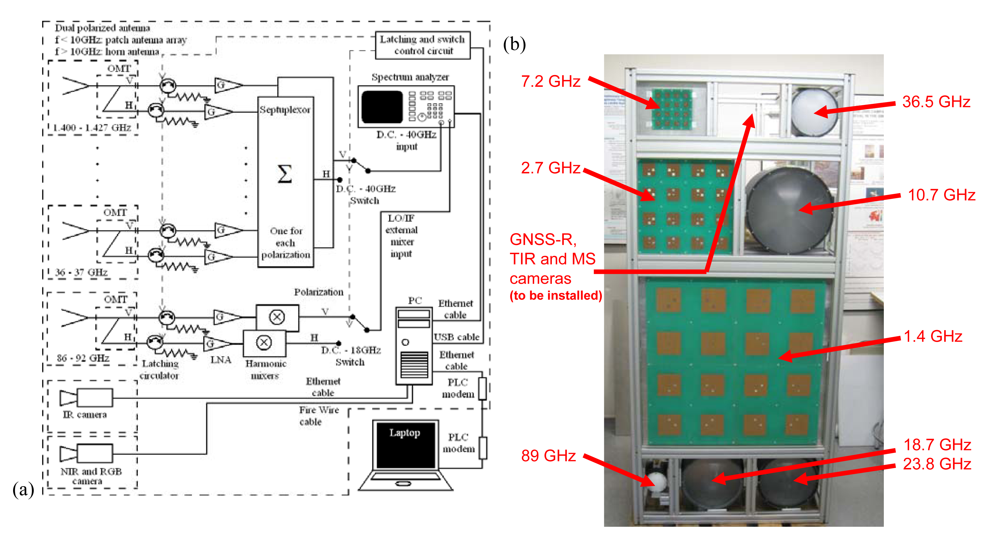
- MERITXELL (Multi-frequency Experimental Radiometer With Interference Tracking For Experiments Over Land And Littoral) a classical Dicke radiometer, that includes not only L-band, but S-, C- X-, K-, Ka-, and W-bands, plus a multi-spectral camera, in addition to the PAU/IR and PAU/GNSS-R units.
2.1. PAU-Real Aperture
- uncorrelated noise, generated by a matched load at each input channel, to compensate for instrumental biases (cross-correlations must be zero), and
- two different levels of correlated noise generated by a common noise source, to compensate for phase and amplitude mismatches among receivers.
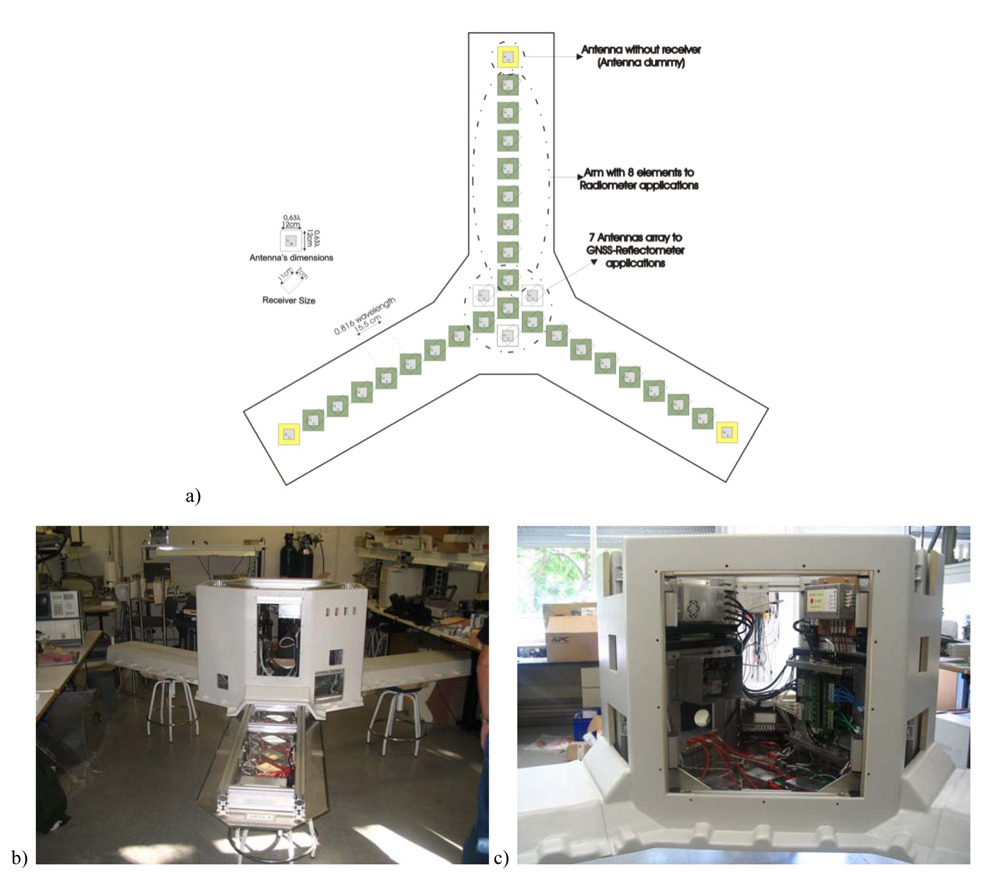
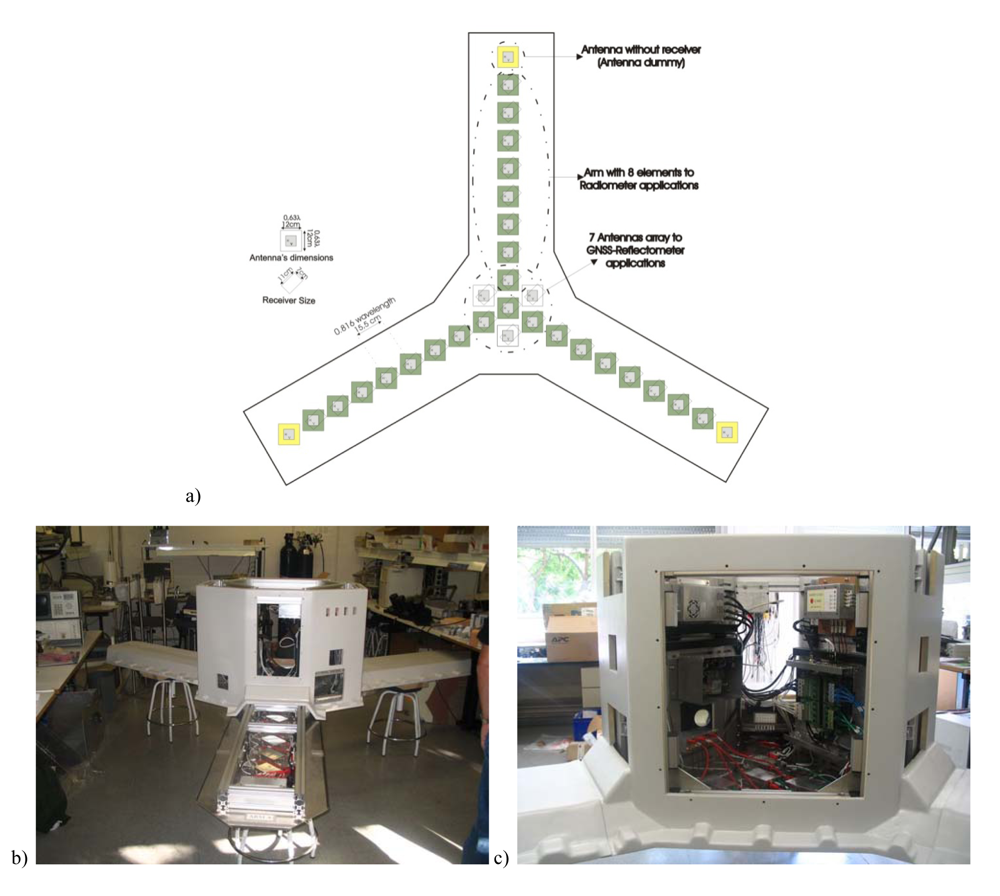
2.2. PAU-Synthetic Aperture
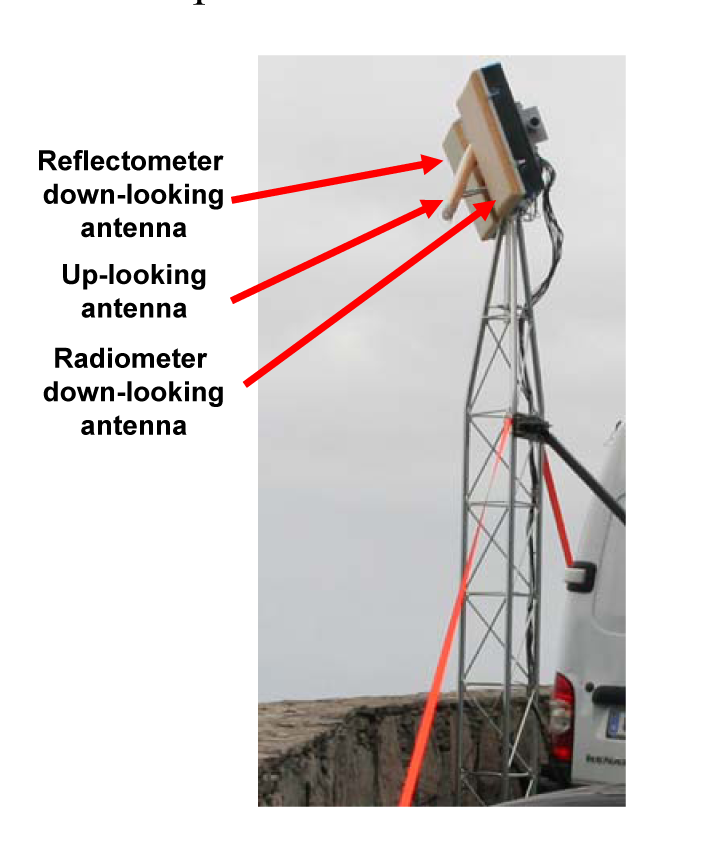
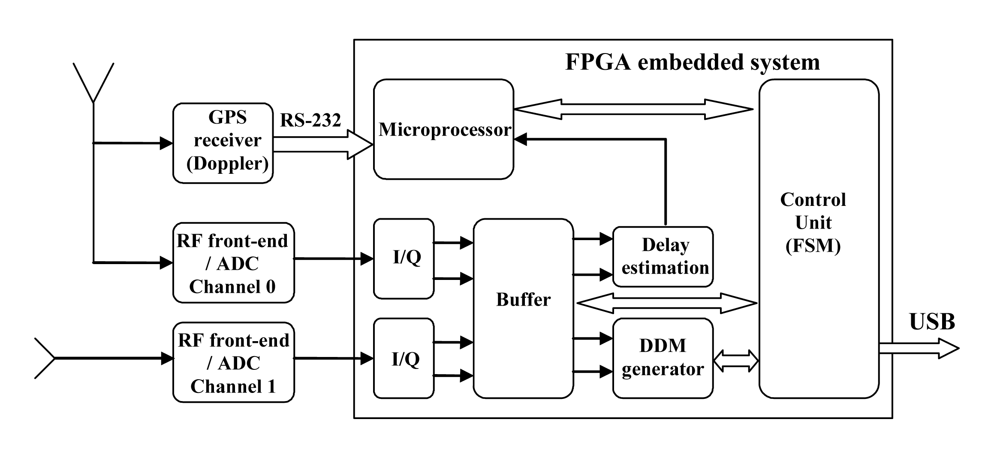
2.3. PAU—One Receiver and griPAU
2.4. PAU-One Receiver Airborne
2.5. The Multifrequency Experimental Radiometer with Interference Tracking for Experiments over Land and Littoral (MERITXELL)
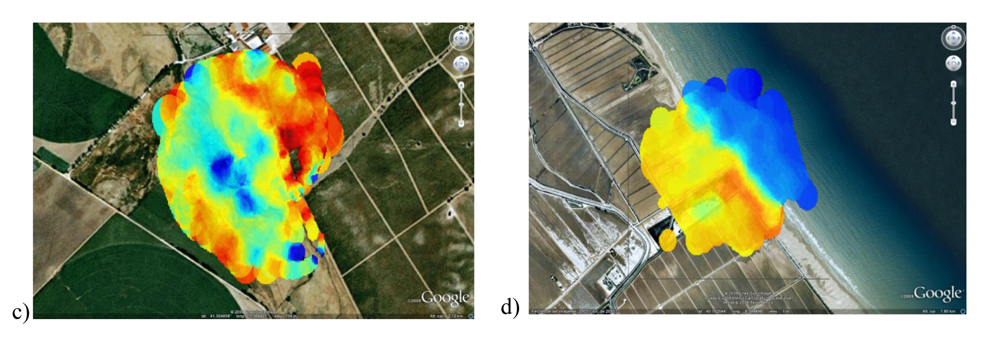
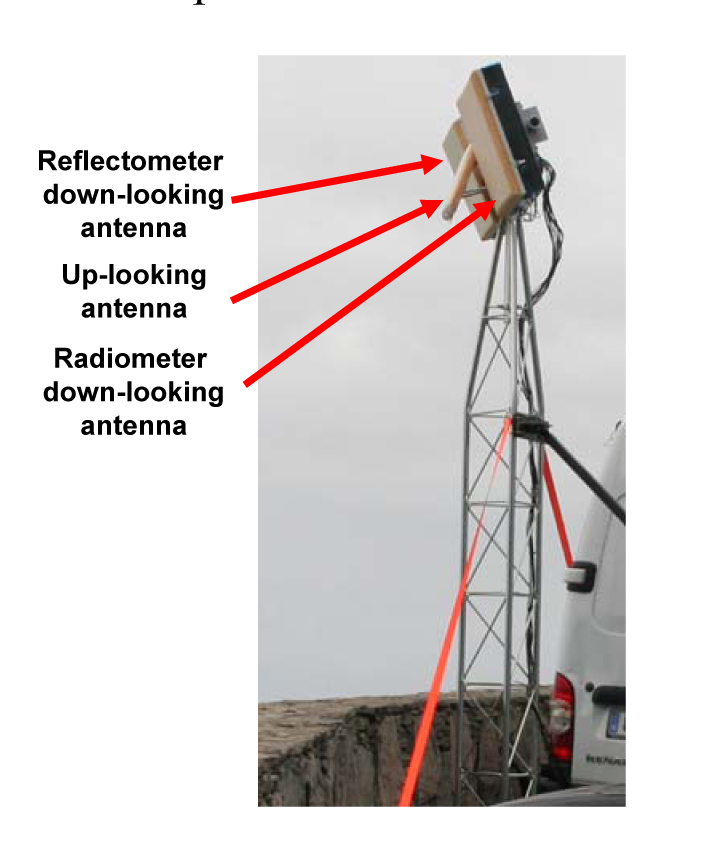
3. Field Experiments
4. Conclusions
Acknowledgments
References and Notes
- Swift, C.T.; McIntosh, R.E. Considerations for Microwave Remote Sensing of Ocean Surface Salinity. IEEE Trans. Geosci. Remote. Sens. 1983, 21, 480–491. [Google Scholar]
- Font, J.; Lagerloef, G.; LeVine, D.; Camps, A.; Zanife, O.Z. The Determination of Surface Salinity with the European SMOS Space Mission. IEEE Trans. Geosci. Remote. Sens. 2004, 42, 2196–2205. [Google Scholar]
- Camps, A.; Font, J.; Vall-llossera, M.; Gabarró, C.; Corbella, I.; Duffo, N.; Torres, F.; Blanch, S.; Aguasca, A.; Villarino, R.; Enrique, L.; Miranda, J.; Arenas, J.; Julià, A.; Etchetto, J.; Caselles, V.; Weill, A.; Boutin, J.; Contardo, S. The WISE 2000 and 2001 Field Experiments in Support of the SMOS Mission: Sea Surface L-Band Brightness Temperature Observations and their Application to Multi-Angular Salinity Retrieval. IEEE Trans. Geosci. Remote. Sens. 2004, 42, 804–823. [Google Scholar]
- Camps, A.; Bosch, X.; Ramos, I.; Marchán, J.F.; Izquierdo, B.; Rodríguez, N. New Instrument Concepts for Ocean Sensing:Analysis of the PAU-Radiometer. IEEE Trans. Geosci. Remote. Sens. 2007, 45, 3180–3192. [Google Scholar]
- Martín-Neira, M. A Passive Reflectometry and Interferometry System (PARIS): Application to Ocean Altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS Signals from the Ocean with Wind Remote Sensing Application. IEEE Trans. Geosci. Remote. Sens. 2000, 38, 951–964. [Google Scholar]
- Marchán;, J.F.; Rodríguez, N.; Camps, A.; Bosch, X.; Ramos, I.; Valencia, E. Correction of the Sea State Impact in the L-Band Brightness Temperature by Means of Delay-Doppler Maps of Global Navigation Satellite Signals Reflected Over the Sea Surface. IEEE Trans. Geosci. Remote. Sens. 2008, 46, 2914–2923. [Google Scholar]
- Marchan-Hernandez, J.F.; Valencia, E.; Rodriguez-Alvarez, N.; Ramos-Perez, I.; Bosch-Lluis, X.; Camps, A.; Eugenio, F.; Marcello, J. Empirical sea state determination using GNSS-R data. In IEEE Geosci. Remote. Sens. Lett.; submitted for publication; 2009. [Google Scholar]
- Valencia, E.; Marchan-Hernandez, J.F.; Camps, A.; Rodriguez-Alvarez, N.; Tarongi, J.M.; Piles, M.; Ramos-Perez, I.; Bosch-Lluis, X.; Vall-llossera, M.; Ferré, P. Experimental Relationship between the Sea Brightness Temperature and the GNSS-R Delay-Doppler Maps: Preliminary Results of the ALBATROSS Field Experiments. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Cape Town, South Africa; 2009. [Google Scholar]
- Bosch-Lluis, X.; Camps, A.; Ramos-Perez, I.; Marchan-Hernandez, J.F.; Rodriguez-Alvarez, N.; Valencia, E. PAU/RAD: Design and Preliminary Calibration Results of a New L-Band Pseudo-Correlation Radiometer Concept. Sensors 2008, 8, 4392–4412. [Google Scholar]
- Bosch-Lluis, X.; Ramos-Perez, I.; Camps, A.; Marchan-Hernandez, J.F.; Rodríguez-Álvarez, N.; Valencia, E.; Guerrero, M.A. Initial Results of a Digital Radiometer With Digital Beamforming. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Boston, MA, USA; 2008; pp. 485–488. [Google Scholar]
- Bosch-Lluis, X.; Ramos-Perez, I.; Camps, A.; Rodriguez-Alvarez, N.; Marchan-Hernandez, J.F.; Valencia, E.; Nieto, J.M. Digital Beamforming Analysis and Performance of a Digital L-Band Pseudo-Correlation Radiometer. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Cape Town, South Africa; 2009. [Google Scholar]
- ESA's SMOS. Available online: http://www.esa.int/esaLP/LPsmos.html (accessed on November 12, 2009).
- Martin-Neira, M.; Martin-Polegre, S.A.J. Polarimetric mode of MIRAS. IEEE Trans. Geosci. Remote. Sens. 2002, 40, 1755–1768. [Google Scholar]
- Ramos-Perez, I.; Bosch-Lluis, X.; Camps, A.; Rodríguez-Álvarez, N.; Marchan-Hernandez, J.F.; Valencia, E.; de la Rosa, S.; Vernich, C.; Pantoja, S. Calibration of Microwave Radiometers Using Pseudo-Random Noise Signals. Sensors 2009, 9, 6131–6149. [Google Scholar]
- Ramos-Perez, I.; Camps, A.; Bosch-Lluis, X.; Marchan-Hernandez, J.F.; Rodríguez-Álvarez, N. Synthetic Aperture PAU: a new instrument to test potential improvements for future SMOSops. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Barcelona, Spain; 2007; pp. 247–250. [Google Scholar]
- Ramos-Perez, I.; Bosch-Lluis, X.; Camps, A.; Valencia, E.; Marchan-Hernandez, J.F.; Rodriguez-Alvarez, N.; Canales-Contador, F. Preliminary Results of the Passive Advanced Unit Synthetic Aperture (PAU-SA). Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Cape Town, South Africa; 2009. [Google Scholar]
- Marchan-Hernandez, J.F.; Camps, A.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Ramos-Perez, I.; Valencia, E. PAU/GNSS-R: Implementation, Performance and First Results of a Real-Time Delay-Doppler Map Reflectometer Using Global Navigation Satellite System Signals. Sensors 2008, 8, 3005–3019. [Google Scholar]
- Valencia, E.; Camps, A.; Marchan-Hernandez, J.F.; Bosch-Lluis, X.; Rodríguez-Álvarez, N.; Ramos-Perez, I. GPS Reflectometer Instrument for PAU (griPAU): Advanced Peformance Real Time Delay Doppler Map Receiver. 2nd Workshop on Advanced RF Sensors and Remote Sensing Instruments, Noordwijk, The Netherlands; ESTEC, 2009. [Google Scholar]
- Camps, A.; Aguasca, A.; Bosch-Lluis, X.; Marchan-Hernandez, J.F.; Ramos-Perez, I.; Rodríguez-Álvarez, N.; Bou, F.; Ibánez, C.; Banqué, X.; Prehn, R. PAU One-Receiver Ground-based and Airborne Instruments. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Barcelona, Spain; 2007; pp. 2901–2904. [Google Scholar]
- Valencia, E.; Acevo, R.; Bosch-Lluis, X.; Aguasca, A.; Rodríguez-Álvarez, N.; Ramos-Perez, I.; Marchan-Hernandez, J.F.; Glenat, M.; Bou, F.; Camps, A. Initial Results of an Airborne Light-Weight L-Band Radiometer. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Boston, MA, USA; 2008; pp. 1176–1179. [Google Scholar]
- Acevo-Herrera, R.; Aguasca, A.; Bosch-Lluis, X.; Camps, A. On the Use of Compact L-Band Dicke Radiometer (ARIEL) and UAV for Soil Moisture and Salinity Map Retrieval: 2008/2009 Field Experiments. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Cape Town, South Africa; 2009. [Google Scholar]
- Gleason, S. Remote Sensing of Ocean, Ice and Land Surfaces Using Bistatically Scattered GNSS Signals From Low Earth Orbit. Ph.D. Thesis, University of Surrey, December 2006. [Google Scholar]
- Camps, A.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Marchan, J.F.; Ramos-Perez, I.; Segarra, M.; Sagues, L.; Tarrago, D.; Cunado, O.; Vilaseca, R.; Tomas, A.; Mas, J.; Guillamon, J. PAU in SeoSAT: A Proposed Hybrid L-band Microwave Radiometer/GPS Reflectometer to Improve Sea Surface Salinity Estimates from Space. Proceedings of Microwave Radiometry and Remote Sensing of the Environment, Florence, Italy, March, 2008. [CrossRef]
- Rodríguez-Álvarez, N.; Marchán, J.F.; Camps, A.; Valencia, E.; Bosch-Lluis, X.; Ramos-Pérez, I.; Nieto, J.M. Soil Moisture Retrieval Using GNSS-R Techniques: Measurement Campaign In A Wheat Field. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Boston, MA, USA; 2008; pp. 245–248. [Google Scholar]
- Rodriguez-Alvarez, N.; Monerris, A.; Bosch-Lluis, X.; Camps, A.; Vall-llossera, M.; Marchan-Hernandez, J.F.; Ramos-Perez, I.; Valencia, E.; Martínez-Fernández, J.; Sanchez-Martin, N.; Baroncini-Turricchia, G.; Perez-Gutierrez, C. Soil Moisture and Vegetation Height Retrieval Using GNSS-R Techniques. Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Cape Town, South Africa; 2009. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | MIRAS/SMOS | PAU-Synthetic Aperture | Rationale for changing the parameter |
|---|---|---|---|
| Frequency operation | protected band: 1400–1427 MHz | GPS L1 (1575.42 MHz) |
|
| Bandwidth | 19 MHz | 2.2 MHz |
|
| Arm size | 4 m | 1.3 m |
|
| Altitude | 755 km | ground-based experiments | - |
| Antenna type | dual-polarization patch antenna (non simultaneous) | dual polarization patch antenna (simultaneous) |
|
| Number of antennas per arm | 23 | 8+1 (dummy) |
|
| Total number of antennas | 69 | 31 | - |
| Antenna spacing | 0.875 λ at 1400 MHz | 0.816 λ at 1575.42 MHz |
|
| Receiver type | 1 per element | 2 per element (1 per polarization) |
|
| Topology of the LO down-converter | distributed LO (groups of 6 elements) | centralized reference clock + internal PLL in each receiver for LO generator. |
|
| Quantization | 1 bit IF sampling | 8 bit IF sub-sampling using a external ADC |
|
| I/Q conversion | analog | digital |
|
| Frequency response shaped by… | analog RF filter | digital low-pass filter |
|
| Power measurement system (PMS) | analog, using detector diode | Digital (FPGA) |
|
| Digital Correlator Unit | fCLK = fsample | fCLK ≫ fsample |
|
| Imaging capabilities | dual-pol or full-pol (sequential) | Full-pol (non-sequential) |
|
| Calibration capabilities | uncorrelated/2-level correlated noise injection | uncorrelated/2-level correlated noise injection and calibration using Pseudo-Random Noise (PRN) sequences |
|
| Integration time | 1.2 s | 1 s, 0.5 s, 100 ms and 10 ms |
|
| Band | Central frequency | Bandwidth | Antenna beamwidth | Main beam efficiency |
|---|---|---|---|---|
| L | 1.4135 GHz | 27 MHz | ∼25° | 98 % |
| S | 2.695 GHz | 10 MHz | ∼25° | 98 % |
| C | 7.185 GHz | 90 MHz | ∼25° | 98 % |
| X | 10.69 GHz | 20 MHz | ∼5° | 95 % |
| K | 18.7 GHz | 200 MHz | ∼5° | 95 % |
| K | 23.8 GHz | 400 MHz | ∼5° | 95 % |
| Ka | 36.5 GHz | 1 GHz | ∼5° | 95 % |
| W | 89 GHz | 6 GHz | ∼5° | 95 % |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Camps, A.; Bosch-Lluis, X.; Ramos-Perez, I.; Marchán-Hernández, J.F.; Rodríguez, N.; Valencia, E.; Tarongi, J.M.; Aguasca, A.; Acevo, R. New Passive Instruments Developed for Ocean Monitoring at the Remote Sensing Lab—Universitat Politècnica de Catalunya. Sensors 2009, 9, 10171-10189. https://doi.org/10.3390/s91210171
Camps A, Bosch-Lluis X, Ramos-Perez I, Marchán-Hernández JF, Rodríguez N, Valencia E, Tarongi JM, Aguasca A, Acevo R. New Passive Instruments Developed for Ocean Monitoring at the Remote Sensing Lab—Universitat Politècnica de Catalunya. Sensors. 2009; 9(12):10171-10189. https://doi.org/10.3390/s91210171
Chicago/Turabian StyleCamps, Adriano, Xavier Bosch-Lluis, Isaac Ramos-Perez, Juan F. Marchán-Hernández, Nereida Rodríguez, Enric Valencia, Jose M. Tarongi, Albert Aguasca, and René Acevo. 2009. "New Passive Instruments Developed for Ocean Monitoring at the Remote Sensing Lab—Universitat Politècnica de Catalunya" Sensors 9, no. 12: 10171-10189. https://doi.org/10.3390/s91210171