Sensing and 3D Mapping of Soil Compaction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
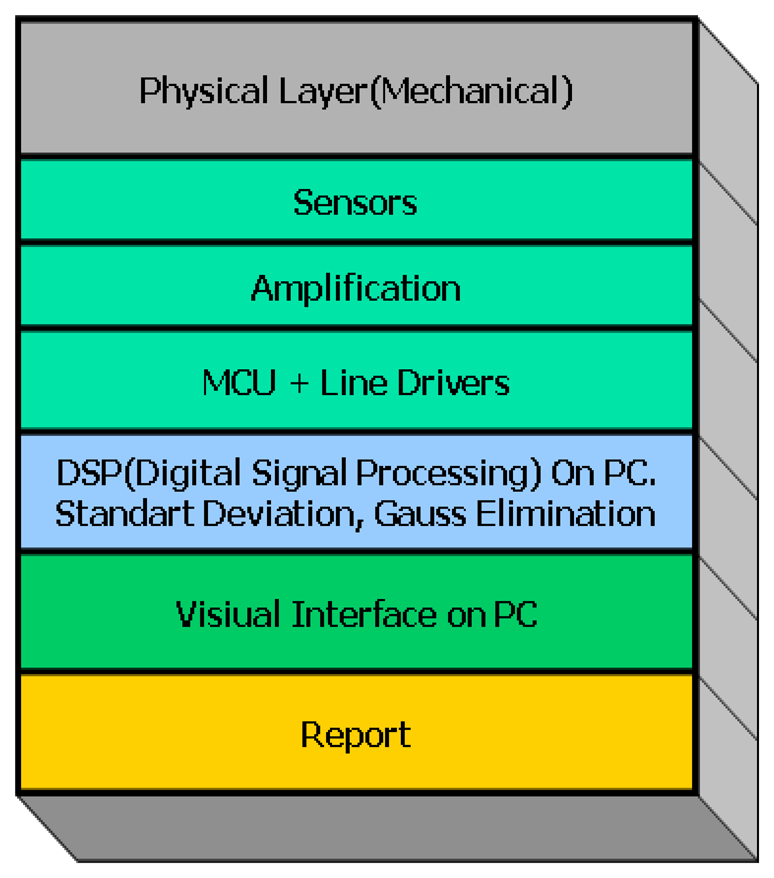
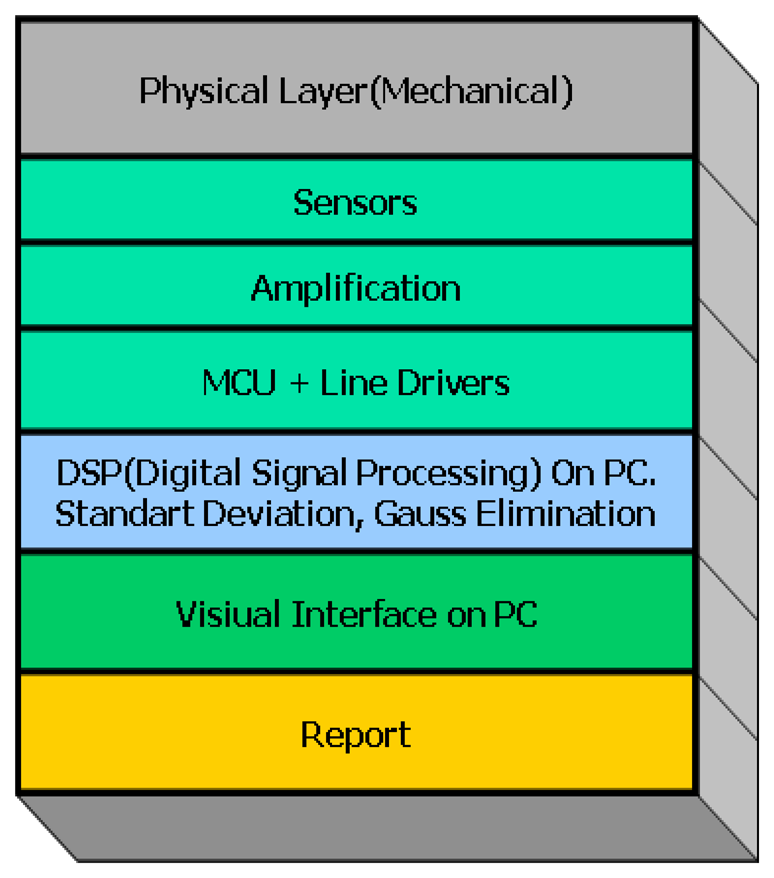
2.1. System Design
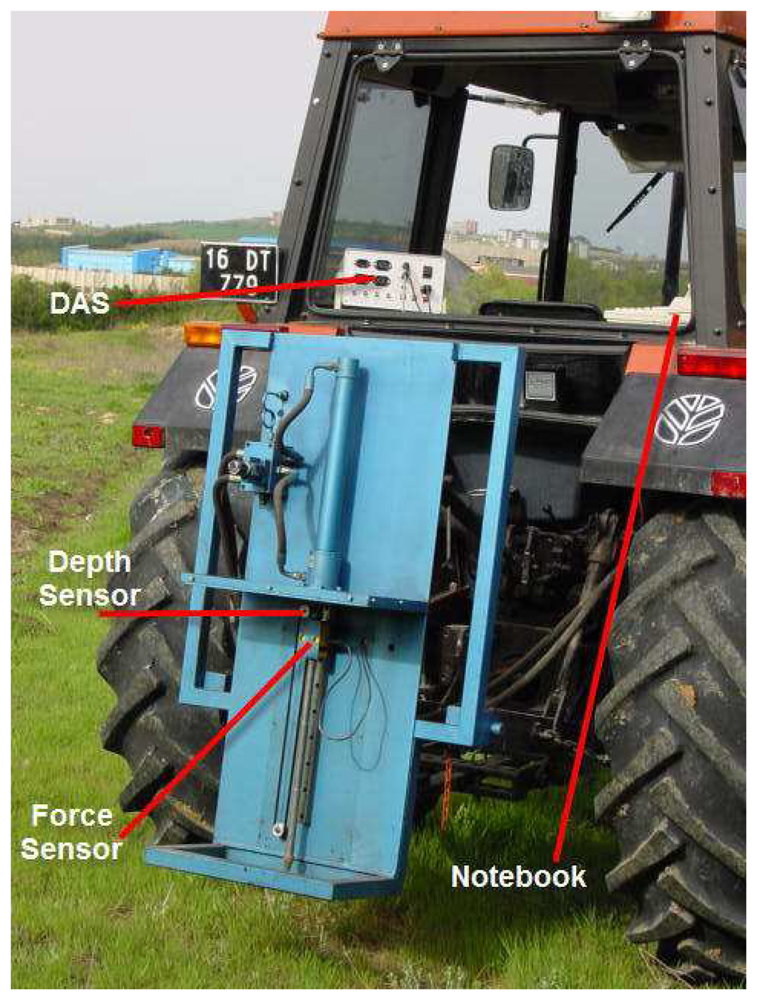
2.1.1. Physical layer
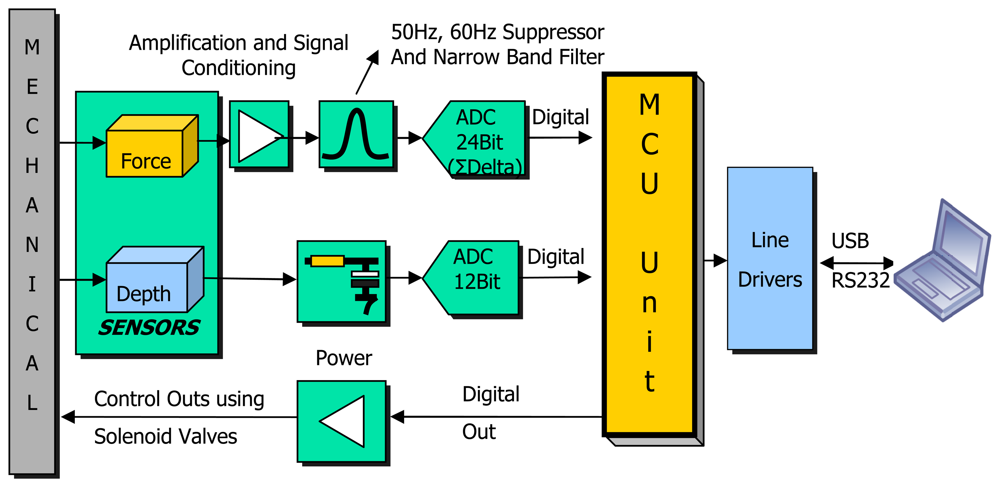
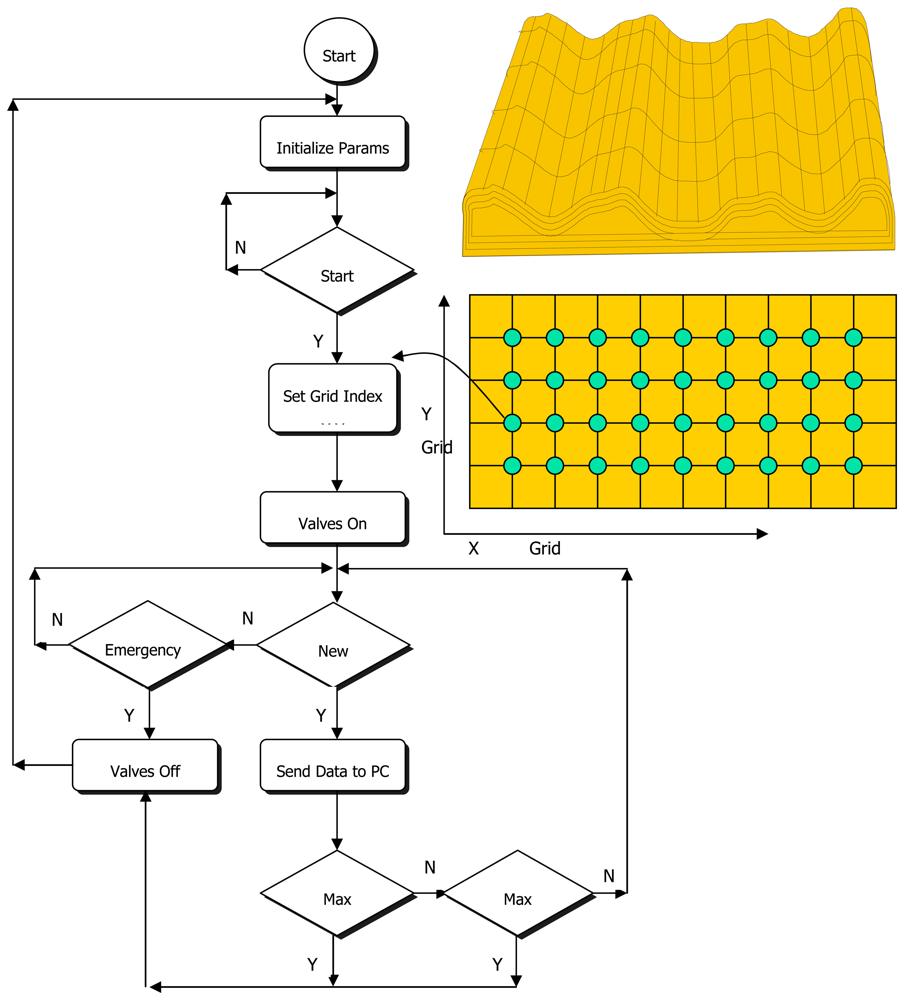
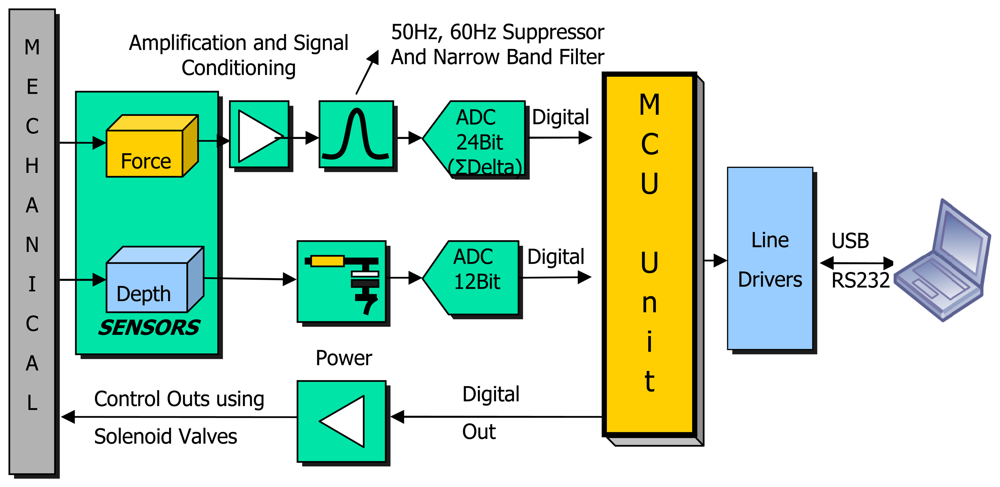
2.1.2. Data acquisition system (DAS)
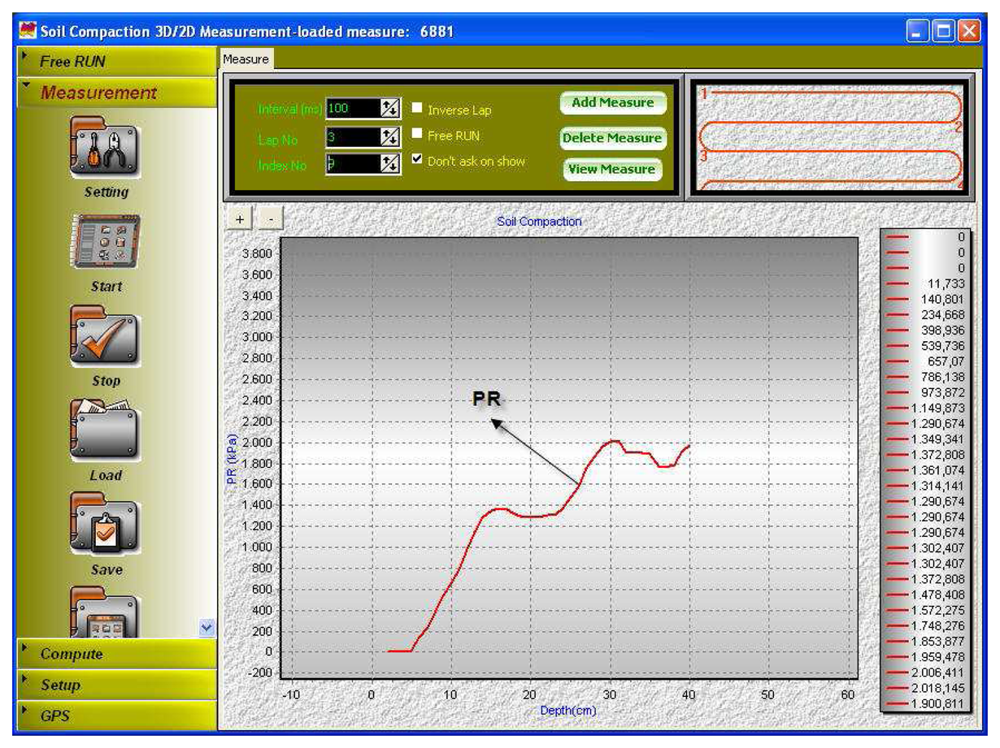
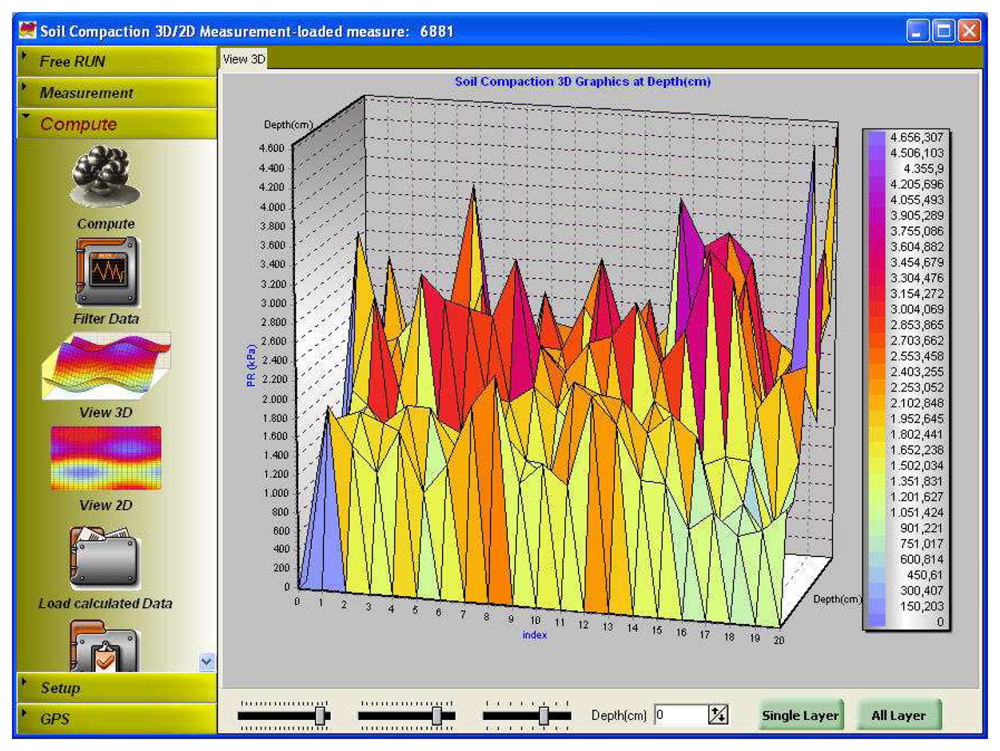
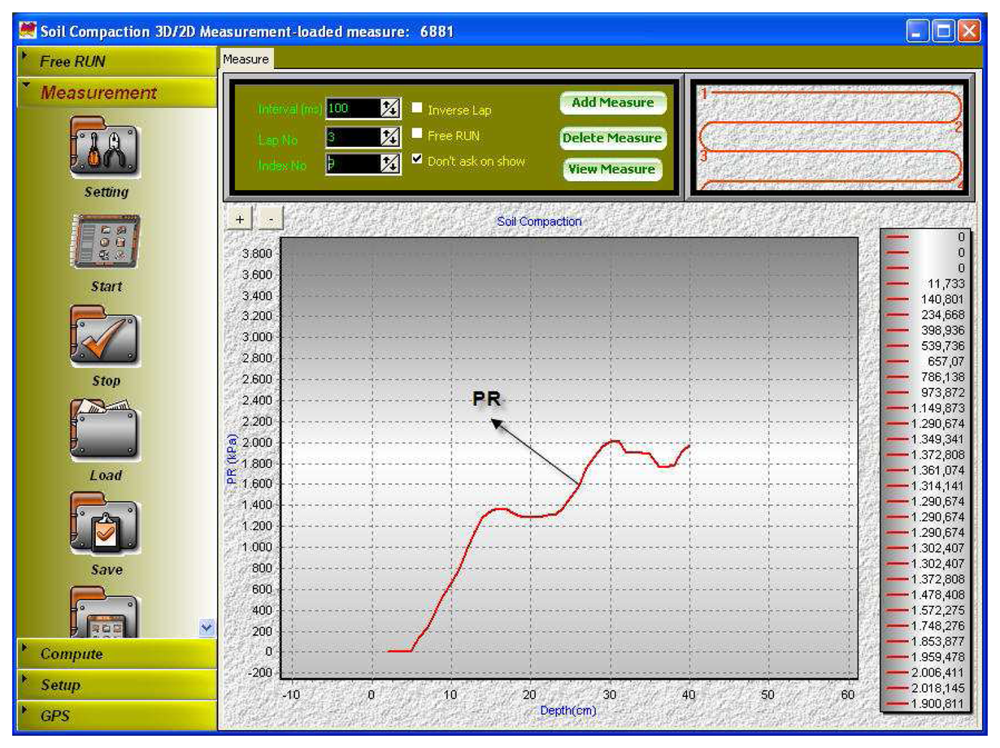
2.1.3. PR 2D/3D –mapping and analysis software
- Definition of the field surface, determination of reference points with GPS
- Measurement of related attributes
- Digital filtering with DSP (Digital Signal Processing) procedures
- Creating visual data for one cm depth interval with the help of 2D/3D Digital Image Processing (DIP) methods
- Reporting (export for Excel and MATLAB)
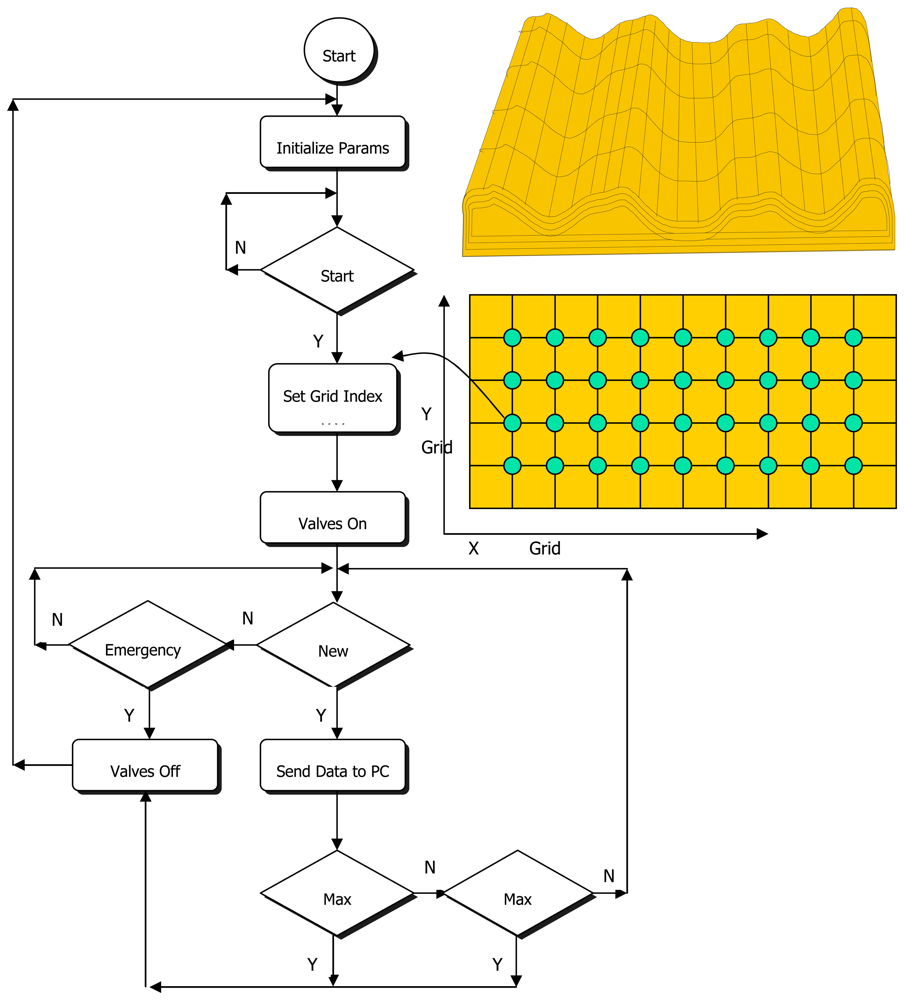
- Approval of the operator for the measurement in each cell: This procedure is important especially for proper alignment of the probe and the cone with the soil surface, allowing instant visual checking for hard objects before the cone starts penetrating the soil.
- Interrupting the recording process when the cone encounters hard matters such as stones that could cause erroneous measurements.
- Averaging multiple measurements for each datum to reduce standard deviation in measured quantities and for eliminating outliers.
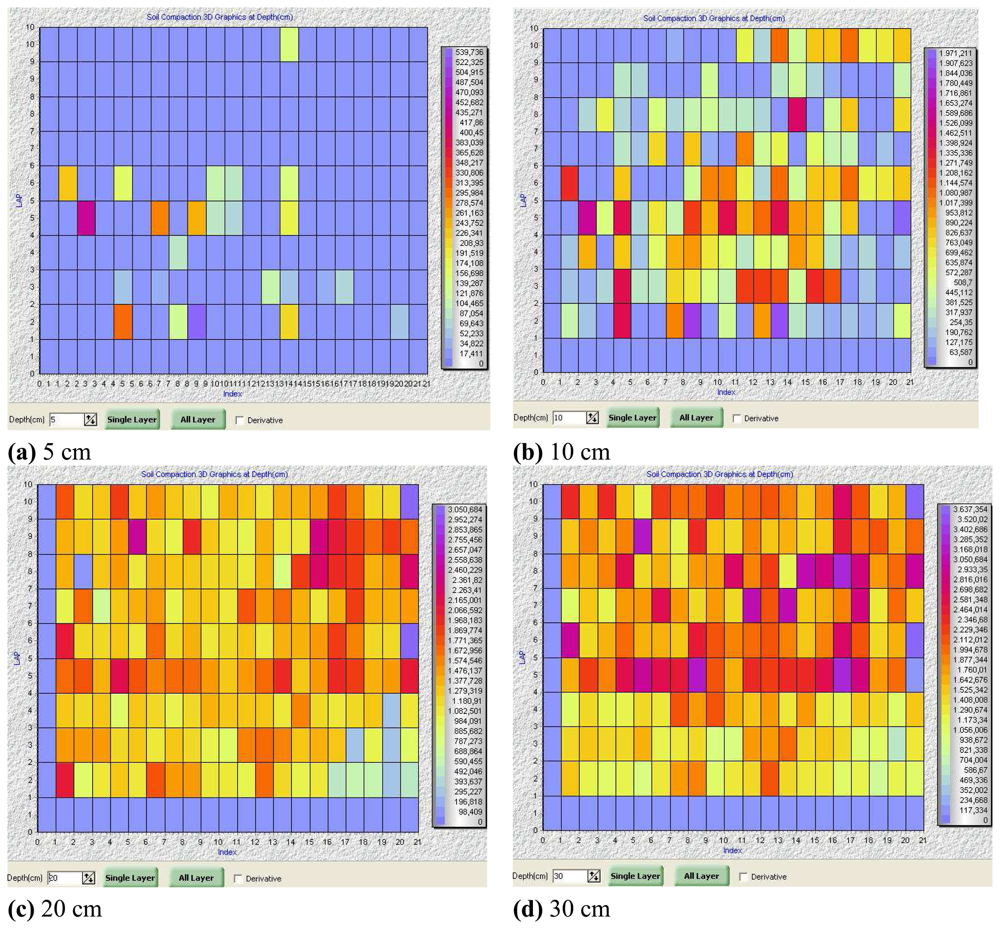
- Scaling force sensor data taken from different depths of the field according to the same color scale.
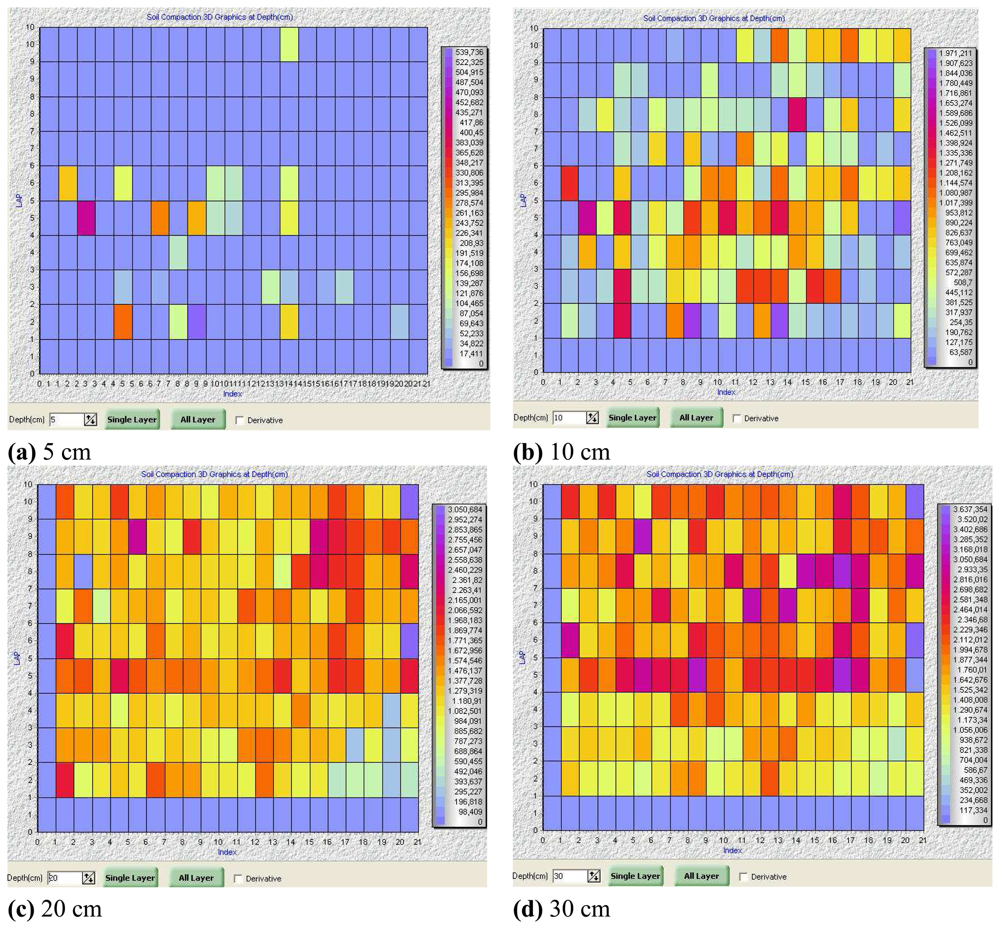
- Displaying measurements at cm intervals: PR values for each cm depth are displayed on 2 dimensional graphics according to the color scale. Depth up to 40 cm can be examined by this method.
- Calculating overall mean at a location: PR value of a cell is determined by calculating the mean of all measurements at each location on each grid (eq. 2).
- Derivation for determining variations: This function analyzes PR variations in a grid with respect to the neighboring grids. Thus, variation slope of compaction can be displayed on a graph. To display variations of PR, directional derivative with the Laplacian filters are used such as A[PRx,y] diagonal (eq. 3), B[PRx,y] horizontal, C[PRx,y] (eq. 4), vertical (eq. 5). Magnitude of PR values shown as X in eq. 6 are applied and calculated by vertical, horizontal and diagonal Laplacian filters [25].
2.2. Experimental site
2.3. Data collection
3. Results and Discussion
4. Conclusions
- The penetrometer mounted on the three-point hitch of the tractor was driven by the tractor hydraulics. The system increased the speed of data collection and hence increased the field efficiency significantly compared to hand-held penetrometers.
- Spatial variations in soil penetration resistance make it difficult to accomplish a constant penetration speed using hand-held penetrometers, resulting in random errors that can not be eliminated. The operator errors were eliminated in this study as result of a standard penetration speed of 3 cm s-1.
- The software used in this study incorporates position data using a GPS receiver and can be used either to tabulate soil compaction data or plot graphs in 2D or 3D, providing immediate visual insight on the level of spatial variation of soil compaction.
- The instant geo-referenced compaction graphing can reduce post-processing time of penetration resistance data and could be used to determine which areas need different tillage treatments.
- Future studies on this system shall focus on mapping problem areas (locations suffering from compaction with PR>2 MPa) and then try to manage different zones accordingly with DPGS guided variable rate tillage equipment.
References and Notes
- Batey, T.D.; McKenzie, C. Soil compaction: identification directly in the field. Soil Use and Management 2006, 22, 123–131. [Google Scholar]
- Raper, R.L. Agricultural traffic impacts on soil. Journal of Terramechanics 2005, 42, 259–280. [Google Scholar]
- Carrara, M.; Castrignanò, A.; Comparetti, A.; Febo, P.; Orlando, S. Mapping of penetrometer resistance in relation to tractor traffic using multivariate geostatistics. Geoderma 2007, 142, 294–307. [Google Scholar]
- Stalham, M.A.; Allen, E.J.; Rosenfeld, A.B.; Herry, F.X. Effects of soil compaction in potato (Solanum tuberosum) crops. Journal of Agricultural Science 2007, 145, 295–312. [Google Scholar]
- Bayhan, Y.; Kayisoglu, B.; Gonulol, E. Effect of soil compaction on sunflower growth. Soil & Tillage Research 2002, 68, 31–38. [Google Scholar]
- Hassan, F.U.; Ahmad, M.; Ahmad, N.; Abbasi, M.K. Effects of subsoil compaction on yield and yield attributes of wheat in the sub-humid region of Pakistan. Soil & Tillage Research 2007, 96, 361–366. [Google Scholar]
- Chan, K.Y.; Oates, A.; Swan, A.D.; Hayes, R.C.; Dear, B.S.; Peoples, M.B. Agronomic consequences of tractor wheel compaction on a clay soil. Soil & Tillage Research 2006, 89, 13–21. [Google Scholar]
- Sadras, V.O.; O'Leary, G.J.; Roget, D.K. Crop responses to compacted soil: capture and efficiency in the use of water and radiation. Field Crops Research 2005, 91, 131–148. [Google Scholar]
- Gregory, A.S.; Watts, C.W.; Whalley, W.R.; Kuan, H.L.; Griffiths, B.S.; Halleth, P.D.; Whitmore, A.P. Physical resilience of soil to field compaction and the interactions with plant growth and microbial community structure. European Journal of Soil Science 2007, 58, 1221–1232. [Google Scholar]
- Al-Adawi, S.S.; Reeder, R.C. Compaction and subsoiling effects on corn and soybean yields and soil physical properties. Transactions of the ASAE 1996, 39, 1641–1649. [Google Scholar]
- Filipovic, D.; Husnjak, S.; Kosutic, S.; Gospodaric, Z. Effects of tillage systems on compaction and crop yield of Albic Luvisol in Croatia. Journal of Terramechanics 2006, 43, 177–189. [Google Scholar]
- Keller, T.; Arvidsson, J. Prevention of traffic-induced subsoil compaction in Sweden: Experiencing from wheeling experiments. Archives of Agronomy and Soil Science 2006, 52, 207–222. [Google Scholar]
- Akinci, I.; Cakir, E.; Topakci, M.; Canakci, M.; Inan, O. The effect of subsoiling on soil resistance and cotton yield. Soil & Tillage Research 2004, 77, 203–210. [Google Scholar]
- Raper, R.L.; Reeves, D.W.; Shaw, J.N.; van Santen, E.; Mask, P.L. Benefits of site-specific subsoiling for cotton production in coastal plain soils. Soil & Tillage Research 2007, 96, 174–181. [Google Scholar]
- Sun, Y.R.; Lammers, P.S.; Ma, D.K. Evaluation of a combined penetrometer for simultaneous measurement of penetration resistance and soil water content. Journal of Plant Nutrition and Soil Science 2004, 167, 745–751. [Google Scholar]
- ASAE. Soil cone penetrometer. ASAE S313.2, Standards engineering practices data. 1994. [Google Scholar]
- Dexter, A.R.; Czyź, E.A.; Gate, O.P. A method for prediction of soil penetration resistance. Soil & Tillage Research 2007, 93, 412–419. [Google Scholar]
- Mouazen, A.M.; Dumont, K.; Maertens, K.; Ramon, H. Two dimensional prediction of spatial variation in topsoil compaction of a sandy loam field-based on measured horizontal force of compaction sensor, cutting depth and moisture content. Soil & Tillage Research 2003, 74, 91–102. [Google Scholar]
- Cui, K.; Défossez, P.; Richard, G. A new approach for modeling vertical stress distribution at the soil/tyre interface to predict the compaction of cultivated soils by using the PLAXIS code. Soil & Tillage Research 2007, 95, 277–287. [Google Scholar]
- Kιlιç, K.; Özgöz, E.; Akbaş, F. Assessment of spatial variability in penetration resistance as related to some soil physical properties of two fluvents in Turkey. Soil & Tillage Research 2004, 76, 1–11. [Google Scholar]
- Castrignanò, A.; Maiorana, M.; Fornaro, F.; Lopez, N. 3D spatial variability of soil strength and its change over time in a durum wheat field in Southern Italy. Soil & Tillage Research 2002, 65, 95–108. [Google Scholar]
- Tekin, Y.; Okursoy, R. Development of a hydraulic-driven soil penetrometer for measuring soil compaction in field conditions. Journal of Applied Sciences 2007, 7, 918–921. [Google Scholar]
- Tekin, Y.; Okursoy, R. The design of hydraulic implementation for three point hitch soil cone penetrometer. Journal of Uludag University Agricultural Faculty 2003, 17, 127–135. [Google Scholar]
- Tekin, Y.; Okursoy, R. An electronic data acquisition system for measuring soil compaction. Proceedings of the 20. National Agricultural Mechanization Congress 2001, 134–139. [Google Scholar]
- Russ, J.C. The Image Processing Handbook, 5th Edition ed; CRC Press, Taylor & Francis Group: New York, USA,, 2006; pp. 291–292. [Google Scholar]


© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Tekin, Y.; Kul, B.; Okursoy, R. Sensing and 3D Mapping of Soil Compaction. Sensors 2008, 8, 3447-3459. https://doi.org/10.3390/s8053447
Tekin Y, Kul B, Okursoy R. Sensing and 3D Mapping of Soil Compaction. Sensors. 2008; 8(5):3447-3459. https://doi.org/10.3390/s8053447
Chicago/Turabian StyleTekin, Yücel, Basri Kul, and Rasim Okursoy. 2008. "Sensing and 3D Mapping of Soil Compaction" Sensors 8, no. 5: 3447-3459. https://doi.org/10.3390/s8053447
APA StyleTekin, Y., Kul, B., & Okursoy, R. (2008). Sensing and 3D Mapping of Soil Compaction. Sensors, 8(5), 3447-3459. https://doi.org/10.3390/s8053447