Systems and Sensors for Debris-flow Monitoring and Warning

Abstract
:1. Introduction
2. Debris-flow monitoring devices
3. Debris-flow warning devices
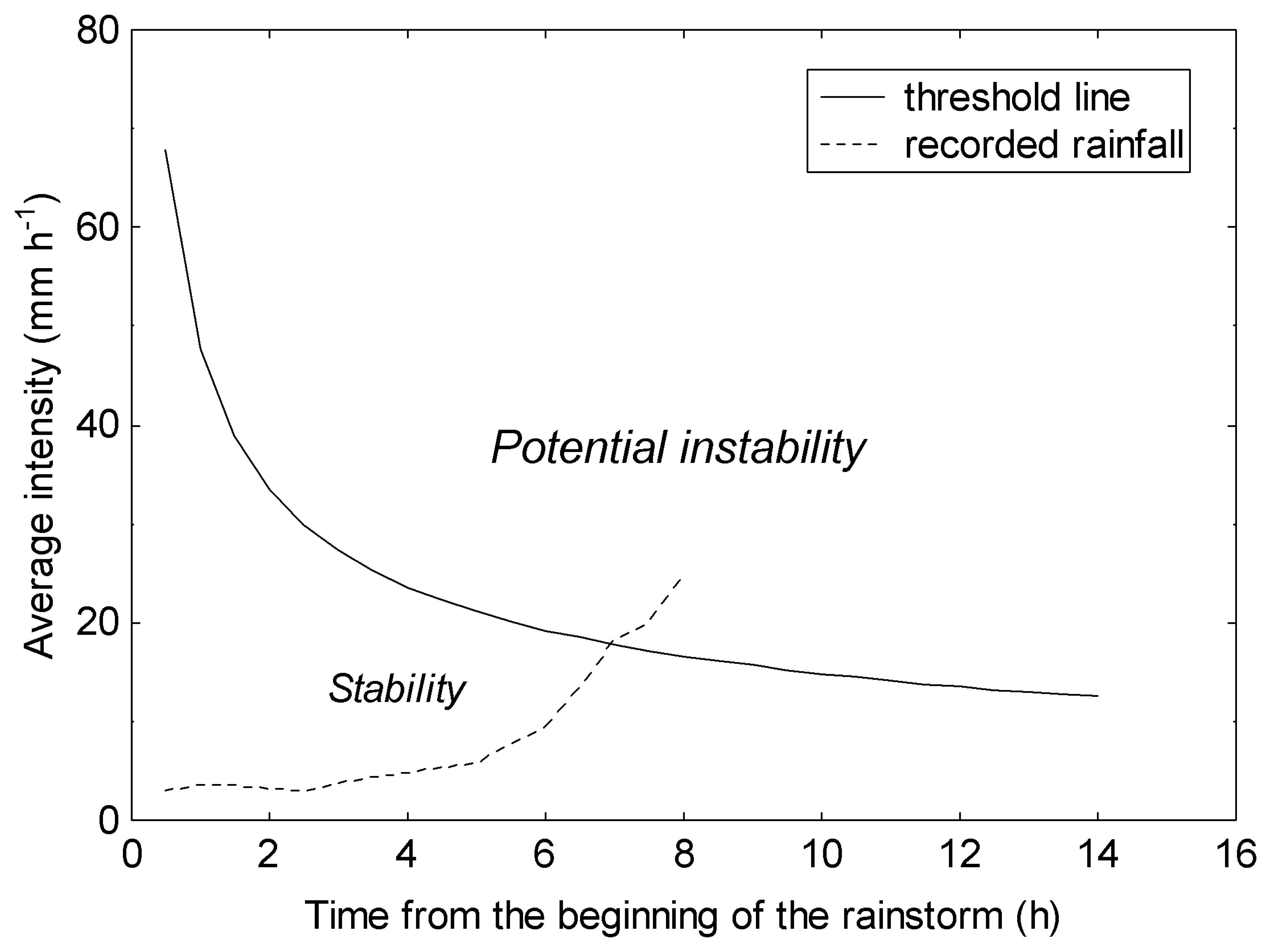
3.1. Advance warning systems
3.2 Event warning systems
4. Conclusions
Acknowledgments
References
- Johnson, A.M. Debris Flows. In Physical Processes in Geology: a method for interpretation of natural phenomena, intrusion in igneous rocks, fractures and folds, flow of debris and ice; Freeman Cooper and co.: San Francisco, 1970; pp. 433–534. [Google Scholar]
- Pierson, T.C. Flow behavior of channelized debris flows, Mount St. Helens, Washington. In Hillslope Processes; Abrahms, A. D., Ed.; Allen & Unwin: Boston, 1986; pp. 269–296. [Google Scholar]
- Takahashi, T. Mechanical characteristics of debris flow. Journal of the Hydraulic Division ASCE 1978, 104, 1153–1169. [Google Scholar]
- Takahashi, T. Debris flow.; IAHR Monograph; A. A. Balkema: Rotterdam, 1991. [Google Scholar]
- Arattano, M.; Savage, W.Z. Modelling debris flows as kinematic waves. Bulletin of the International Association of Engineering Geology 1994, 49, 3–13. [Google Scholar]
- Coussot, Ph.; Meunier, M. Recognition, classification and mechanical description of debris flows. Earth-Science Reviews 1996, 40, 209–227. [Google Scholar]
- Iverson, R.M. The physics of debris flows. Reviews of Geophysics 1997, 35, 245–296. [Google Scholar]
- Costa, J.E.; Williams, G.P. Debris flow dynamics; U.S. Geological Survey Open File Report 84-606; 1984; video tape, 23 min. [Google Scholar]
- Itakura, Y.; Inaba, H.; Sawada, T. A debris-flow monitoring devices and methods bibliography. Natural Hazards and Earth Systems Sciences 2005, 5, 971–977. [Google Scholar]
- Aulitzky, H. The debris flows of Austria. Bulletin of the International Association of Engineering Geology 1989, 40, 5–13. [Google Scholar]
- Chang, S.Y. Evaluation of a system for detecting debris flows and warning road traffic at bridges susceptible to debris flow hazard. Proceedings of the Third International Conference on Debris-flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Davos, 10-12 September, 2003; Rickenmann, D., Chen, C. L., Eds.; Millpress: Rotterdam, 2003; pp. 731–742. [Google Scholar]
- Arattano, M.; Marchi, L.; Genevois, R.; Berti, M.; Simoni, A.; Tecca, P.R.; Bonte, M. Field monitoring and real time management of debris flows. European Project “Debris Flow Risk” (N. ENV4960253), Final Report. 1999, 30. [Google Scholar]
- Arattano, M.; Deganutti, A.M.; Marchi, L. Debris Flow Monitoring Activities in an Instrumented Watershed of the Italian Alps. Proceedings of the First International Conference on Debris-flow Hazards Mitigation: Mechanics, Prediction, and Assessment, San Francisco, August 7-9, 1997; Chen, C., Ed.; Water Resources Engineering Division - ASCE: New York, 1997; pp. 506–515. [Google Scholar]
- Genevois, R.; Tecca, P.R.; Berti, M.; Simoni, A. Debris-flow in the Dolomites: Experimental data from a monitoring system. Proceedings of the Second International Conference on Debris-flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Taipei, 16-18 August, 2000; Wieczorek, G., Naeser, N., Eds.; A.A. Balkema: Rotterdam, 2000; pp. 283–291. [Google Scholar]
- Suwa, H.; Yamakoshi, T.; Sato, K. Relationship between debris-flow discharge and ground vibration. Proceedings of the Second International Conference on Debris-flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Taipei, 16-18 August, 2000; Wieczorek, G., Naeser, N., Eds.; A.A. Balkema: Rotterdam, 2000; pp. 311–318. [Google Scholar]
- Hürlimann, M.; Rickenmann, D.; Graf, C. Field and monitoring data of debris-flow events in the Swiss Alps. Canadian Geotechnical Journal 2003, 40, 161–175. [Google Scholar]
- McArdell, B.; Bartelt, P.; Kowalski, J. Field observations of basal forces and fluid pore pressure in a debris flow. Geophysical Research Letters 2007, 34, L07406. [Google Scholar] [CrossRef]
- Suwa, H.; Okuda, S. Measurement of debris flows in Japan. Proceedings of the Fourth International Conference and Field Workshop on Landslides, Tokyo, 23-31 August, 1985; pp. 391–400.
- Zhang, S. A comprehensive approach to the observation and prevention of debris flows in China. Natural Hazards 1993, 7, 1–23. [Google Scholar]
- Arattano, M. On the use of seismic detectors as monitoring and warning systems for debris flows. Natural Hazards 1999, 20, 197–213. [Google Scholar]
- Arattano, M. Monitoring the presence of the debris flow front and its velocity through ground vibration detectors. Proceedings of the Third International Conference on Debris-flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Davos, 10-12 September, 2003; Rickenmann, D., Chen, C. L., Eds.; Millpress: Rotterdam, 2003; pp. 719–730. [Google Scholar]
- Arattano, M.; Marchi, L. Measurement of debris flow velocity through cross-correlation of instrumentation data. Natural Hazards and Earth System Sciences 2005, 5, 137–142. [Google Scholar]
- Itakura, Y.; Ogawa, K.; Suwa, H.; Mizuhara, K. Trends and fluctuation of the surface-velocity of debris flow measured by a non-contact speed sensor with a spatial filter. In Fluid control and measurement; Harada, M., Ed.; Pergamon Press: Tokyo, 1985; pp. 781–786. [Google Scholar]
- Itakura, Y.; Suwa, H. Measurement of surface velocity of debris flows by spatial filtering velocimetry. Proceedings of the Japan-China Symposium on Landslides and Debris Flows, Tokyo; 1989; pp. 199–203. [Google Scholar]
- Inaba, H.; Uddin, M.S.; Itakura, Y.; Kasahara, M. Surface velocity vector field measurement of debris flow based on spatio-temporal derivative space method. Proceedings of the First International Conference on Debris-flow Hazards Mitigation: Mechanics, Prediction, and Assessment, San Francisco, August 7-9, 1997; Chen, C., Ed.; Water Resources Engineering Division - ASCE: New York, 1997; pp. 757–766. [Google Scholar]
- Arattano, M.; Grattoni, P. Using a fixed video camera to measure debris-flow surface velocity. Proceedings of the Second International Conference on Debris-flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Taipei, 16-18 August, 2000; Wieczorek, G., Naeser, N., Eds.; A.A. Balkema: Rotterdam, 2000; pp. 273–281. [Google Scholar]
- Arattano, M.; Marchi, L. Video-derived velocity distribution along a debris flow surge. Physics and Chemistry of the Earth Part B 2000, 25, 781–784. [Google Scholar]
- Berti, M.; Simoni, A. Experimental evidences and numerical modelling of debris flow initiated by channel runoff. Landslides 2005, 2, 171–182. [Google Scholar]
- Okuda, S.; Suwa, H.; Okunishi, K.; Yokoyama, K.; Nakano, M. Observations on the motion of a debris flow and its geomorphological effects. Zeitschrift für Geomorphologie N.F., Suppl. Bd. 35 1980, 142–163. [Google Scholar]
- Hanisch, J.; Ergenzinger, P.; Bonte, M. Dumpling-an “intelligent” boulder for studying internal processes of debris flows. Proceedings of the Third International Conference on Debris-flow Hazard Mitigation: Mechanics, Prediction, and Assessment, Davos, 10-12 September, 2003; Rickenmann, D., Chen, C.L., Eds.; Millpress: Rotterdam, 2003; pp. 843–849. [Google Scholar]
- Arattano, M. On debris flow front evolution along a torrent. Physics and Chemistry of the Earth Part B 2000, 25, 733–740. [Google Scholar]
- Marchi, L.; Arattano, M.; Deganutti, A.M. Ten years of debris-flow monitoring in the Moscardo Torrent (Italian Alps). Geomorphology 2002, 46, 1–17. [Google Scholar]
- Hungr, O.; Morgan, G.C.; Van Dine, D.F.; Lister, R.D. Debris flow defenses in British Columbia. In Debris Flows / Avalanches: Process, Recognition, and Mitigation; Costa, J.E., Wieczorek, G.F., Eds.; Geological Society of America, Reviews in Engineering Geology, 1987; Volume 7, pp. 201–222. [Google Scholar]
- Davies, T.R.H. Using hydroscience and hydrotechnical engineering to reduce debris flow hazards. Proceedings of the First International Conference on Debris-flow Hazards Mitigation: Mechanics, Prediction, and Assessment, San Francisco, August 7-9, 1997; Chen, C., Ed.; Water Resources Engineering Division - ASCE: New York, 1997; pp. 787–810. [Google Scholar]
- Caine, N. The rainfall intensity-duration control of shallow landslides and debris flows. Geografiska Annaler 1980, 62A, 23–27. [Google Scholar]
- Guzzetti, F.; Peruccacci, S.; Rossi, M.; Stark, C.P. Rainfall thresholds for the initiation of landslides in cantral and southern Europe. Meteorology and Atmospheric Physics 2007, 98, 239–267. [Google Scholar]
- Wilson, R.C.; Mark, R.K.; Barbato, G. Operation of a Real-time warning system for debris flows in the S. Francisco Bay Area, California. Proceedings of the ASCE 1993 National Conference on Hydraulic Engineering and International Symposium on Engineering Hydrology, San Francisco, 25-30 July 1993; Shen, H. W., Su, S.T., Wen, F., Eds.; ASCE: New York, 1993; pp. 1592–1597. [Google Scholar]
- Jakob, M.; Weatherly, H. A hydroclimatic threshold for landslide initiation on the North Shore Mountains of Vancouver, British Columbia. Geomorphology 2003, 54, 137–156. [Google Scholar]
- Liu, K.F.; Chen, S.C. Integrated debris flow monitoring system and virtual center. Proceedings of the Third International Conference on Debris-flow Hazard Mitigation: Mechanics, Prediction, and Assessment, Davos, 10-12 September, 2003; Rickenmann, D., Chen, C. L., Eds.; Millpress: Rotterdam, 2003; pp. 767–774. [Google Scholar]
- Suwa, H.; Okunishi, K.; Sakai, M. Motion, debris size and scale of debris flows in a valley on Mount Yakedake; Japan; IAHS Publ. no. 217, 1993; pp. 239–248. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Sensor employed for the measurement |
|---|---|
| Peak flow depth | Direct post-event observation through theodolite or GPS, wire sensors, photocells, ultrasonic sensors |
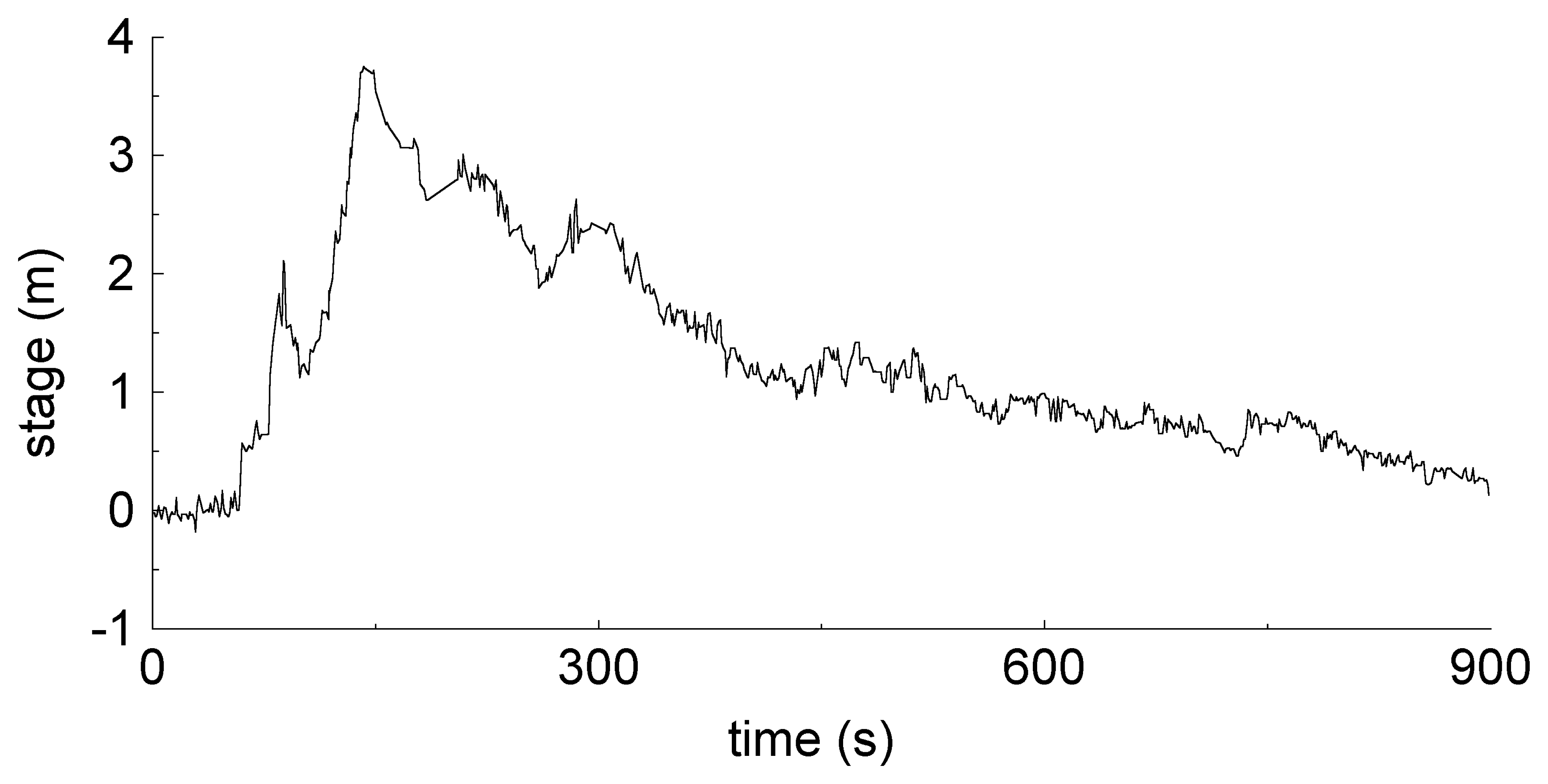
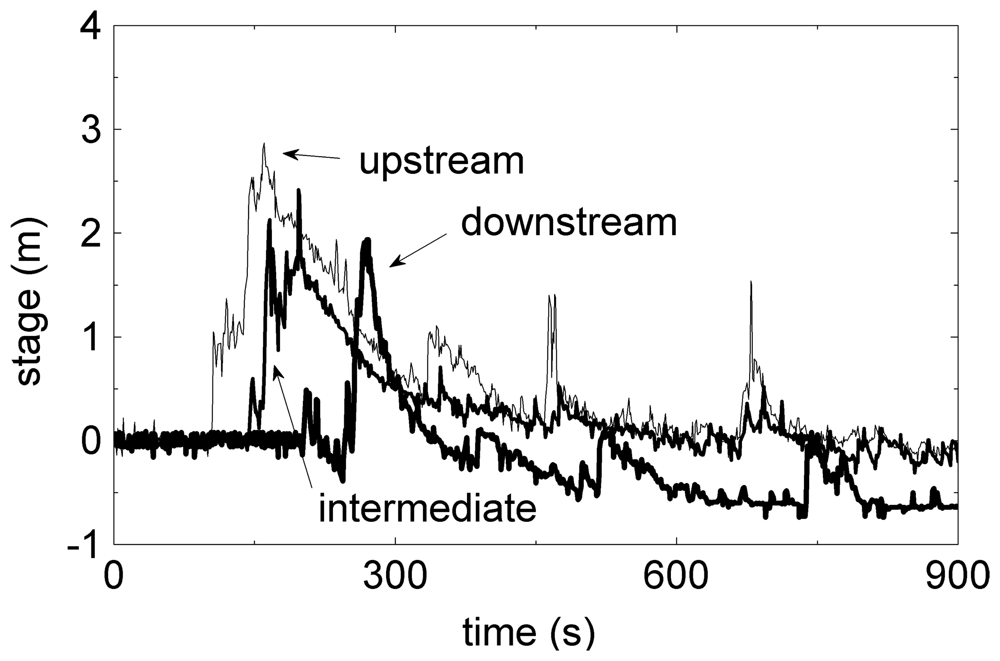
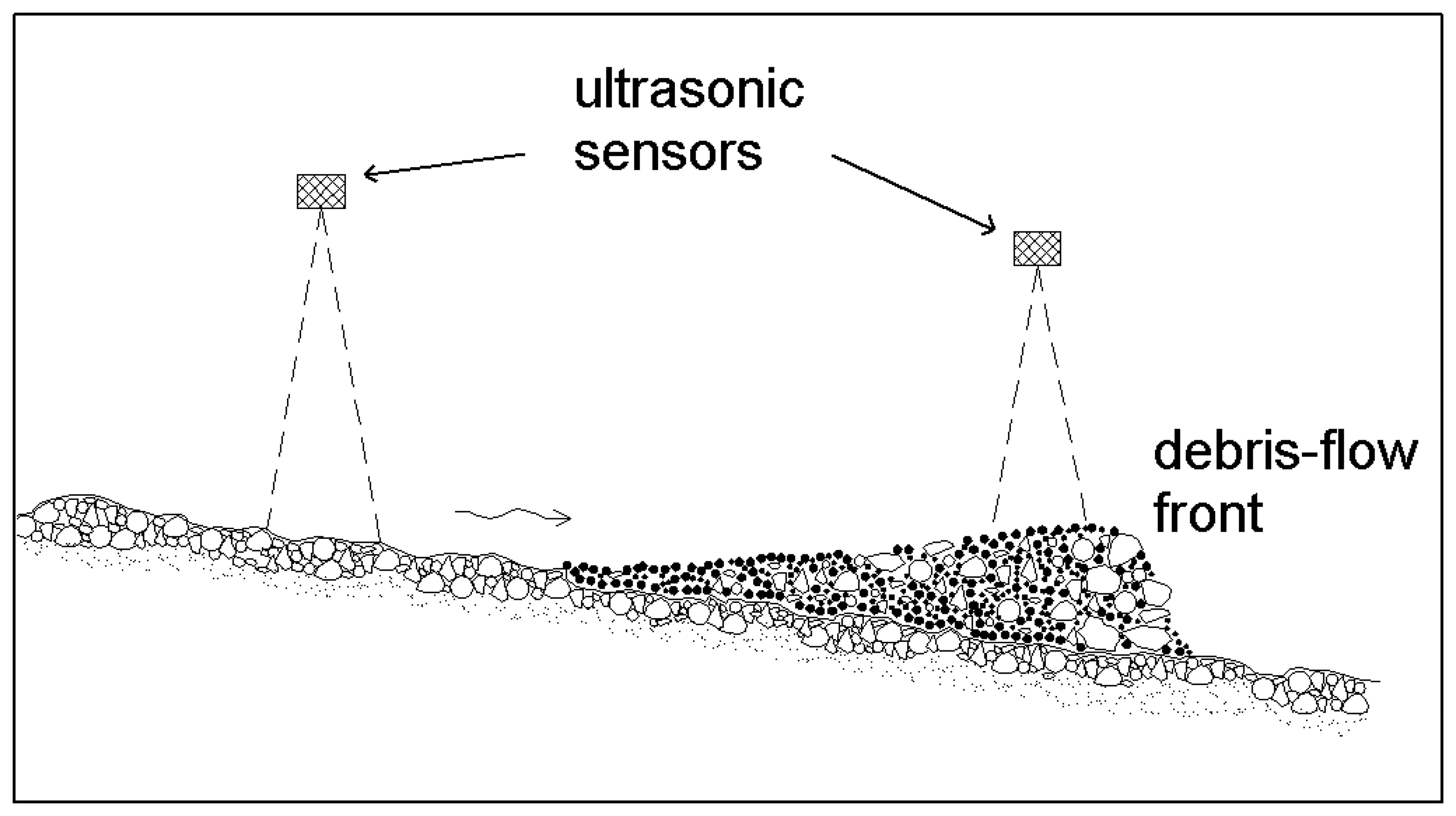
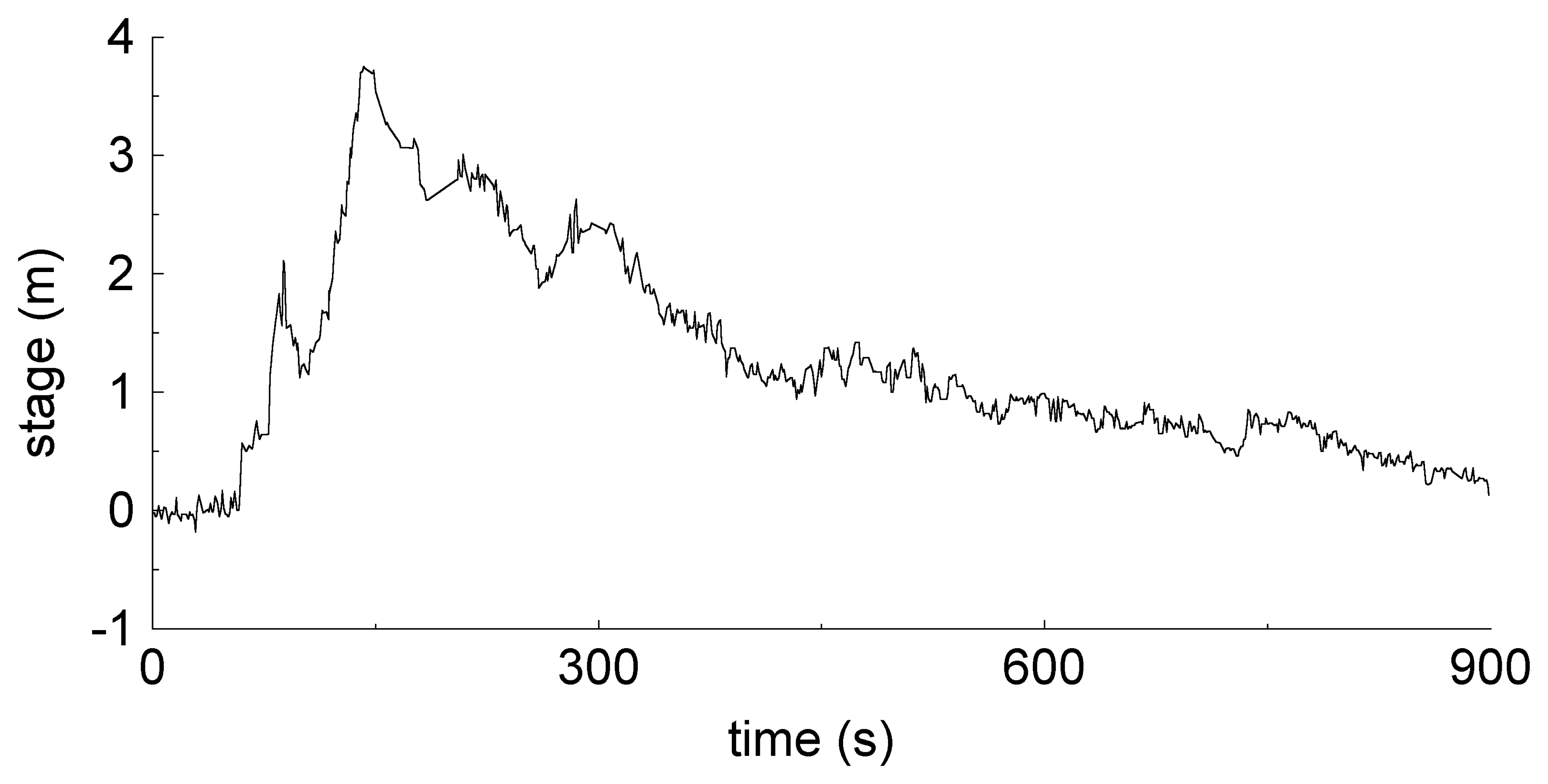
| Flow depth as function of time | Ultrasonic sensors, radar sensors |
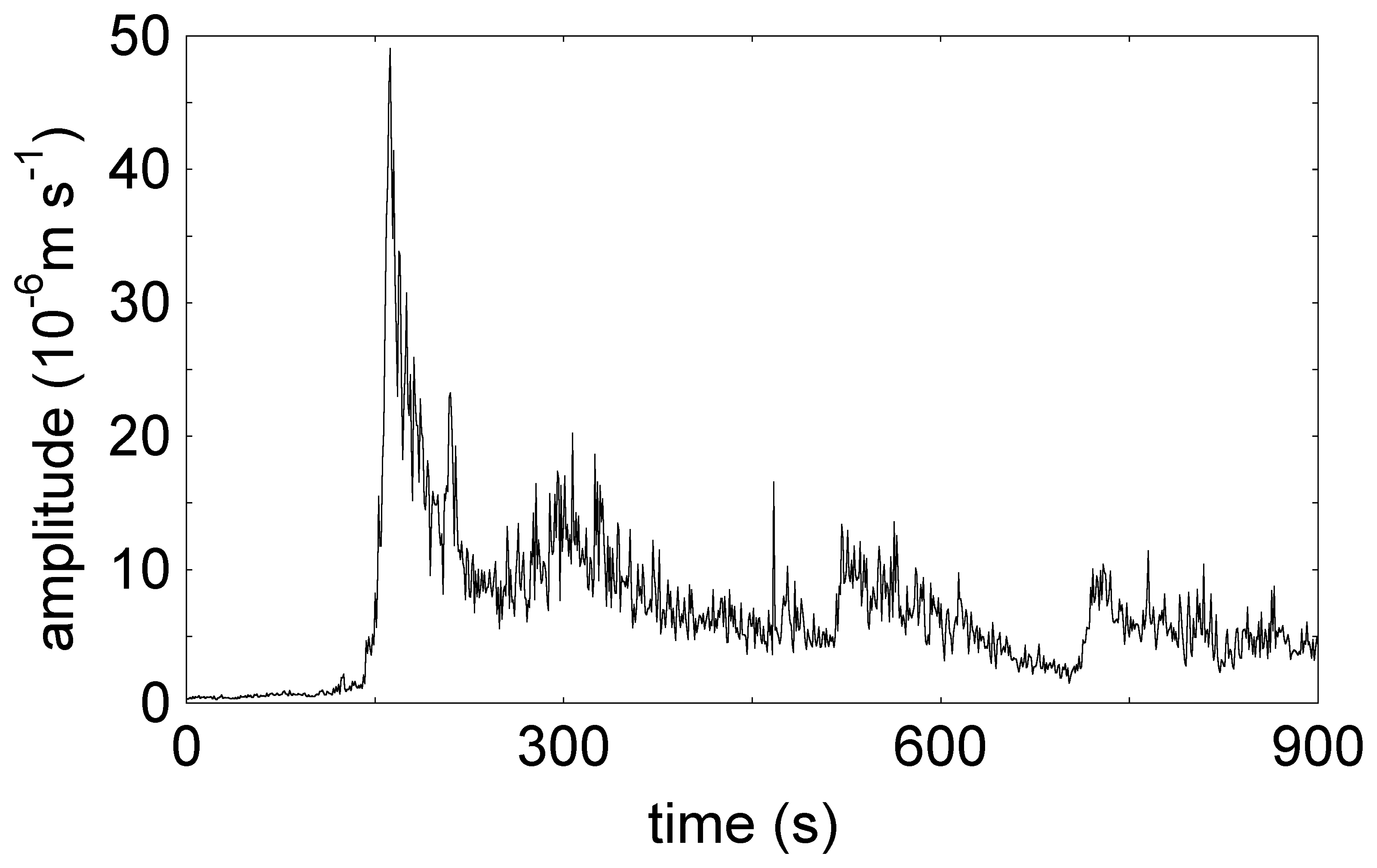
| Ground vibration | Seismometer or geophones (velocimeters, accelerometers) |
| Underground sound | Microphones |
| Mean flow velocity | Ultrasonic sensors, geophones |
| Surface velocity | Electromagnetic doppler speedometers, video recordings, speed sensors based on spatial filtering velocimetry |
| Basal forces (normal and shear stress) | Load cells |
| Fluid pore pressure | Pressure sensors |
| Impact force | Pressure mark gauges, piezoelectric sensors |
| Sensors | Operation | Advantages | Limitations |
|---|---|---|---|
| Ultrasonic, radar and laser sensors. | Measurement of the flow stage. | Easy to set warning thresholds. | Ultrasonic sensors have to be hung over the channel; installation can prove difficult if the channel banks are unstable. |
| Geophones and seismometers. | Measurement of ground vibrations caused by debris flow. | Easy and safe installation (the sensors are buried in safe places on stream banks). | Setting warning thresholds can be quite complicated. Risk of false alarms due to other sources of ground vibration (passage of trains or trucks, rockfalls, etc.). The need to filter the signal may increase system complexity. |
| Pendulums. | Detection of the debris-flow from the tilting of the pendulum. | Simple and robust device. | The pendulum must be hung over the channel; installation can prove difficult if the channel banks are unstable. |
| Wire sensors. | Detection of the debris-flow from wire breaking. | Simple and robust device. | Need for restoration after activation. Risk of false alarms due to accidental circumstances (passage of animals, falling trees, etc.). |
| Photocells (infrared photobeams, etc.). | Detection of debris-flow passage. | Non-contact detectors: do not need restoration after activation. | A careful installation is needed to avoid having the sensors come into contact with the flow. |
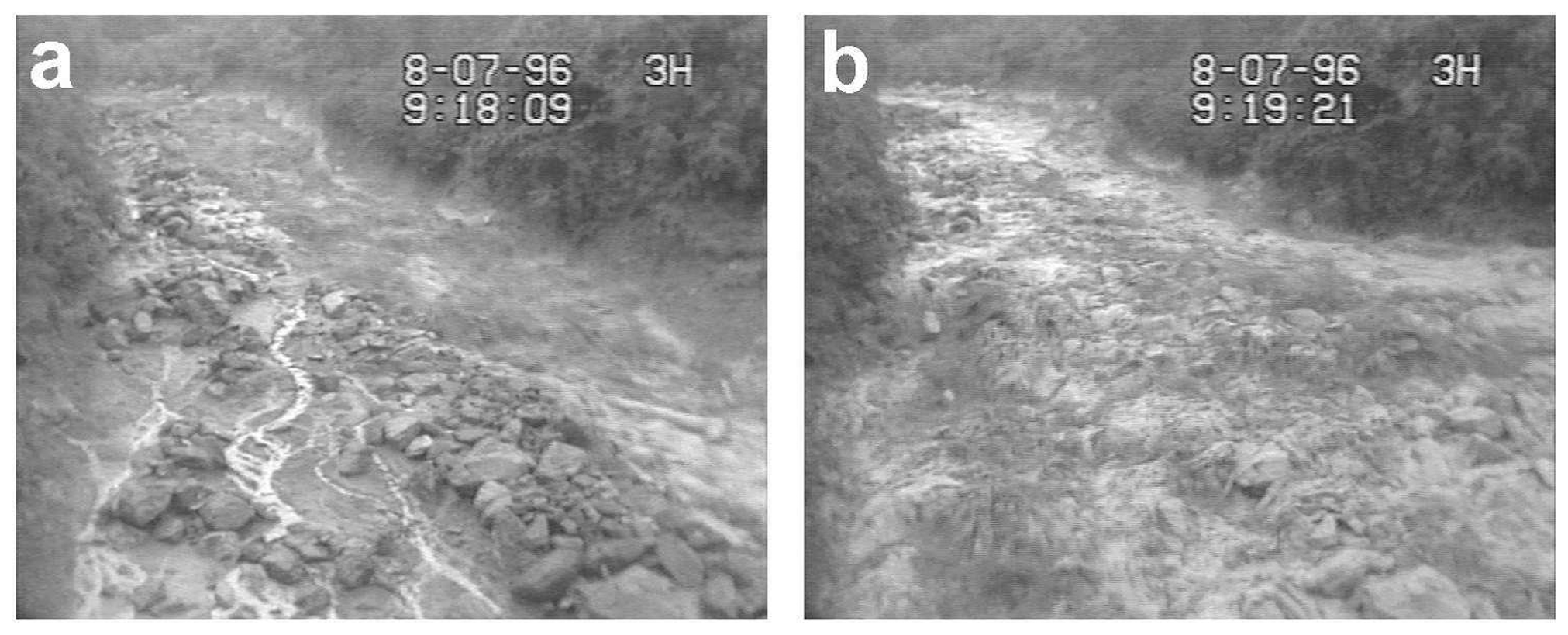
| CCD camera for machine-vision detection. | Recognition of debris flows. | Safe installation (the camera can be placed beside the channel). | The presence of fog or the occurrence of debris flow at night may complicate the use of the system and its workability. |
© 2008 by MDPI (http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Arattano, M.; Marchi, L. Systems and Sensors for Debris-flow Monitoring and Warning. Sensors 2008, 8, 2436-2452. https://doi.org/10.3390/s8042436
Arattano M, Marchi L. Systems and Sensors for Debris-flow Monitoring and Warning. Sensors. 2008; 8(4):2436-2452. https://doi.org/10.3390/s8042436
Chicago/Turabian StyleArattano, Massimo, and Lorenzo Marchi. 2008. "Systems and Sensors for Debris-flow Monitoring and Warning" Sensors 8, no. 4: 2436-2452. https://doi.org/10.3390/s8042436
APA StyleArattano, M., & Marchi, L. (2008). Systems and Sensors for Debris-flow Monitoring and Warning. Sensors, 8(4), 2436-2452. https://doi.org/10.3390/s8042436