A First Comparison of Simultaneous Sea Level Measurements from Envisat, GFO, Jason-1, and TOPEX/Poseidon

Key Laboratory of Ocean Remote Sensing, Ministry of Education, Ocean Remote Sensing Institute, Ocean University of China, 5 Yushan Road, Qingdao 266003, China
*
Author to whom correspondence should be addressed.
Sensors 2006, 6(3), 235-248; https://doi.org/10.3390/s6030235
Submission received: 28 July 2005
/
Accepted: 10 February 2006
/
Published: 17 March 2006
(This article belongs to the Special Issue Satellite Altimetry: New Sensors and New Application)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:The multiple altimeter missions have not only advanced our knowledge of ocean circulation, ice sheet topography, and global climate, but also improved the accuracy of altimetric measurements by cross-calibration and validation. In this paper, one year's simultaneous maps of sea level anomaly (MSLA) data obtained from four altimeters, Envisat, Geosat Follow-On (GFO), Jason-1, and TOPEX/Poseidon (T/P), have been compiled for a preliminary comparison. First, the discrepancy in global geographical distribution of each product relative to the merged MSLA field is analyzed and its signal retrieval capability is discussed. Second, the space/time variability of each discrepancy in the Atlantic Ocean, Indian Ocean, Pacific Ocean, Northern Hemisphere, Southern Hemisphere, and global ocean is studied. Third, each discrepancy as a function of latitude, longitude, and merged MSLA is presented. The results show that Jason-1 is the best single-mission for mapping large scale sea level variation, while T/P in its new orbit presents the poorest estimation of SLA due to the short period (from cycle 369 to 403) used to determine the mean profile. A clear understanding of each product discrepancy is necessary for a meaningful combination or merging of multi-altimeter data, optimal product selection, as well as for their assimilation into numerical models.
1. Introduction
Sea level change, an important oceanic indicator of climate variation, has been measured by two datasets—tide gauges and satellite altimetry. In recent years, sea level data from altimeters have become much popular in geoscience community as a result of their continuous coverage in space and time, as well as observing capability for both large scale and mesoscale ocean circulation [1-2]. Since 1970s, a series of altimeter missions have been carried out, such as GEOS-3 and Seasat launched in 1975 and 1978, respectively, and Geosat launched in 1986 [3-4]. In 1990s, a new era of space oceanography started with the launch of the European Space Agency (ESA) satellites, ERS-1 and ERS-2, which are for multi-purpose platforms and carrying an altimeter amongst other instruments, and reached its current state-of-the-art by TOPEX/Poseidon (T/P), which was specially designed as an ocean topography mission [5]. For a better monitoring and understanding of long term climate variation, Geosat-Follow-On (GFO), Jason-1, and Envisat, being the follow-on missions of Geosat, T/P, and ERS-2, were successfully launched in 1998, 2001, and 2002, respectively. These multiple altimeter missions have led to vast improvements of accuracy of altimeter measurements by cross-calibration and validation between them, as well as of the mapping capability for mesoscale variability and ocean circulation [6-12].
During 2002-2003, the five altimeters provided sea level data simultaneously with the older missions still in operation while the new follow-on missions were calibrated and validated. Due to technical problems, the ERS-2 tape recorder was switched off in June 2003 and declared to be permanently unavailable in the following month. Before T/P was terminated on 18 January 2006, there were still four altimeters, Envisat, GFO, Jason-1, and T/P, flying concurrently in different orbits and providing operational near-real time sea level products to international users via AVISO. One year's simultaneous data from the four missions are compiled and the purpose of this paper is to reveal the discrepancy of each product compared to the merged MSLA data in order to achieve a better understanding of each product in the mapping capabilities, which has obvious operational relevance, and hopefully the results of this study can be regarded as a reference for users to select suitable products for specific oceanic regions and temporal spans in sea level studies.
2. Altimeter data
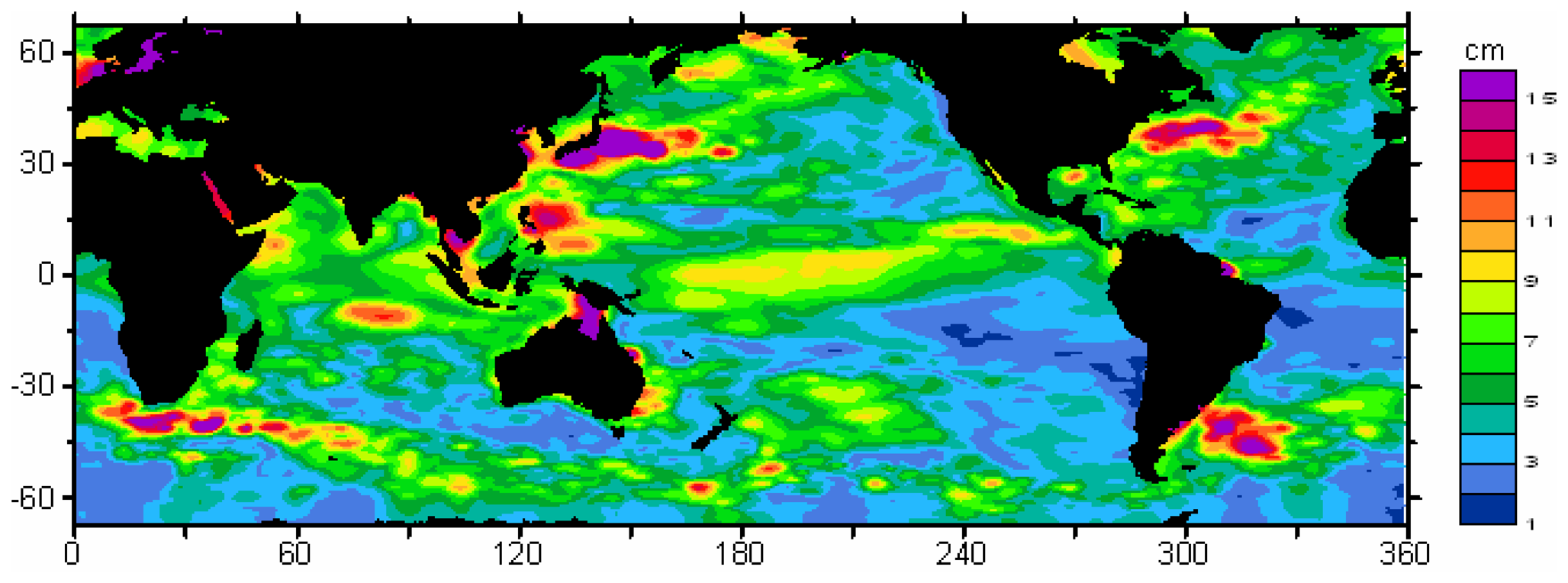
Weekly near-real time low resolution (1°×1°) of MSLA data obtained from AVISO for the period February 18, 2004 to March 2, 2005 of each mission are compiled in this study. Recent studies have shown that the merged MSLA obtained from multi-missions by use of optimal interpolation really can improve the accuracy of sea level observation and estimation of mesoscale variation (see references 8-12). Furthermore, recent studies have shown that using such a merged MSLA can reveal some annual amphidromes of sea level variation [13], which are hardly observed by using single missions. Therefore we assume the merged MSLA from four missions as the reference for this study and its RMS is shown in Figure 1. We will compute the RMS difference between the MSLA from individual sensors and the reference MSLA, and refer it as RMS Error (RMSE). A detailed description of MSLA data processing is documented in AVISO user handbook: (M)SLA and (M)ADT near-real time and delayed time products [14]. We are informed by AVISO help ([email protected]) that the cycles used for T/P mean profile calculation are started from cycle 369 through cycle 403 (2002.9-2003.8), which is not stated clearly by the user handbook (see reference 14;.
3. Results
3.1 Geographical patterns
The geographical distributions of RMSE for Envisat, GFO, Jason-1, and T/P are shown in Figure 2. An overall impression is that RMSE of GFO and Jason-1 are much lower than Envisat and T/P. The global mean RMSE over the 55 weeks is 1.429cm, 1.285cm, 1.125cm, and 1.993cm for Envisat, GFO, Jason-1, and T/P, respectively, suggesting that Jason-1 is the best for single-satellite case while T/P having the largest RMSE in its new orbit. As a result of the homogeneity, precision, and consistency of datasets obtained from each mission, the RMSE difference is mostly explained by the mapping error because of the different orbit configuration of each satellite. The mapping discrepancy results for large scale ocean variations obtained from single satellite case are different from mesoscale mapping errors analyzed by Le Traon and Dibarboure [10], and their results show that GFO is the best for mapping mesoscale signals, while Jason-1 has the largest error because T/P and Jason-1 orbits are optimized specially for large scale ocean signal observation. Areas with higher RMSE are mainly found over regions with high ocean variability, such as Antarctic Circumpolar Current (ACC), Gulf Stream, Kuroshio, Brazil/Malvinas Confluence region, and Agulhas Current, where the RMSE varies from 5cm to 25 cm. This confirms that areas with high ocean variability are more difficult to map by use of a single altimeter and that merging has the biggest positive impact on these regions. Part of the higher RMSE over these mesoscale-rich areas might be attributed to the filtering and interpolation involved in the generation of 1-degree products. The large area of high discrepancy of T/P is surprising. We assume that it is mainly caused by the short period (from cycle 369 to cycle 403) mean profile on which SLA is extracted and the large interannual variability of sea level. Since geoids are not known with sufficient accuracy, data along each satellite track need to be referenced to a mean profile (repeat-track analysis) to get SLA measurements. The SLA of Envisat, GFO, and Jason-1 can be extracted based on each mean profile proposed by Le Traon et al. (see reference 15), while for T/P in its new orbit, only one year data are available to calculate the mean profile.
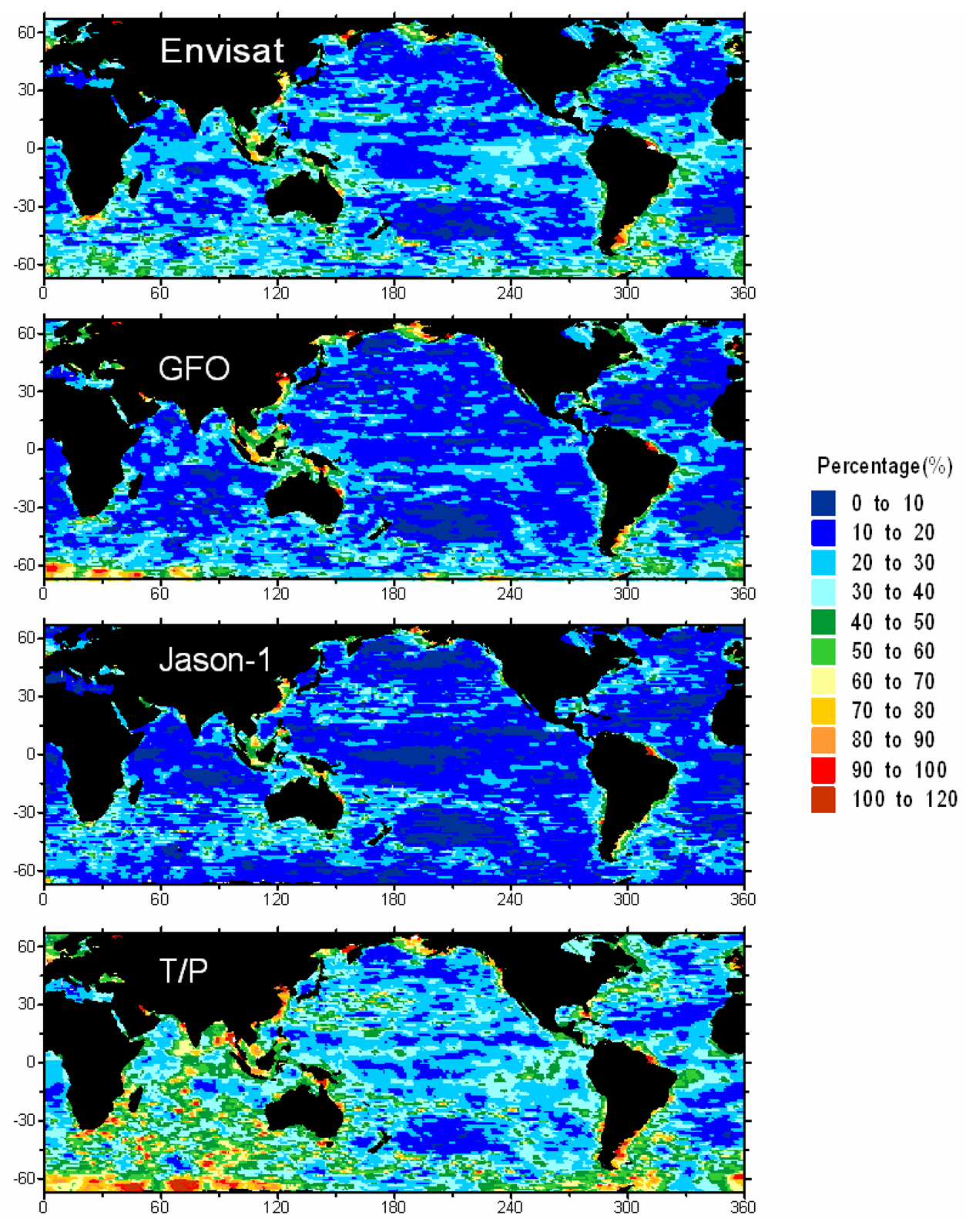
To further examine the mapping capability of each single mission for large scale ocean variation, we present RMSE for each mission as a percentage of RMS of the merged MSLA in Figures 3. By comparing Figures 2 and 3 one can see that regions with low RMSE in Figure 2 (blue color) do not always map the sea level variation very accurately, which can be expected because the 1-degree MSLA data is not designed for mapping the area with very low energy. For Envisat, 27.8% of the whole oceanic gridpoints are clearly different from the merged MSLA, which seems to suggest that the estimations of these gridpoints with percentages more than 30% are poor. As far as GFO and Jason-1 are concerned, estimations are better with the exception of some marginal seas, ACC region from GFO, the south Indian Ocean from Jason-1 single case. The poor mapping results around land may be attributed to the large contamination of tidal aliases over the shallow water. The short time series of T/P data further raises the concern of mapping capability from this newly returned mission.
3.2 Spatial dependence
Figure 2 clearly shows that the same oceanic regions share different RMSE of each sensor and also the same sensor has different RMSE over different regions. For a better understanding this spatial dependence of RMSE of individual sensor, the domain averaged RMSE relative to the merged MSLA for Envisat, GFO, Jason-1, and T/P is given in Figure 4 in terms of the Atlantic Ocean, Indian Ocean, Pacific Ocean, Northern Hemisphere, Southern Hemisphere, and global ocean. The most noticeable feature is that T/P is the poorest case in mapping SLA and Jason-1 is the best single-satellite case from February 2004 to March 2005. Looking at the differences between oceanic basins, each mission has the lowest RMSE in the Pacific Ocean, and the highest RMSE in the Indian Ocean; this difference is particularly pronounced for the T/P case. As far as the two hemispheres are concerned, the Southern Hemisphere (SH) is easier than the Northern Hemisphere (NH) to map because of the larger land distribution in NH. An overall result over the global ocean is that each mission is still suitable to map large scale ocean variation because the largest RMSE, T/P, has not surpassed 3cm, though from Figure 2 and 3 we know that T/P product is the poorest case in its new orbit to map SLA.
3.3 Temporal evolution
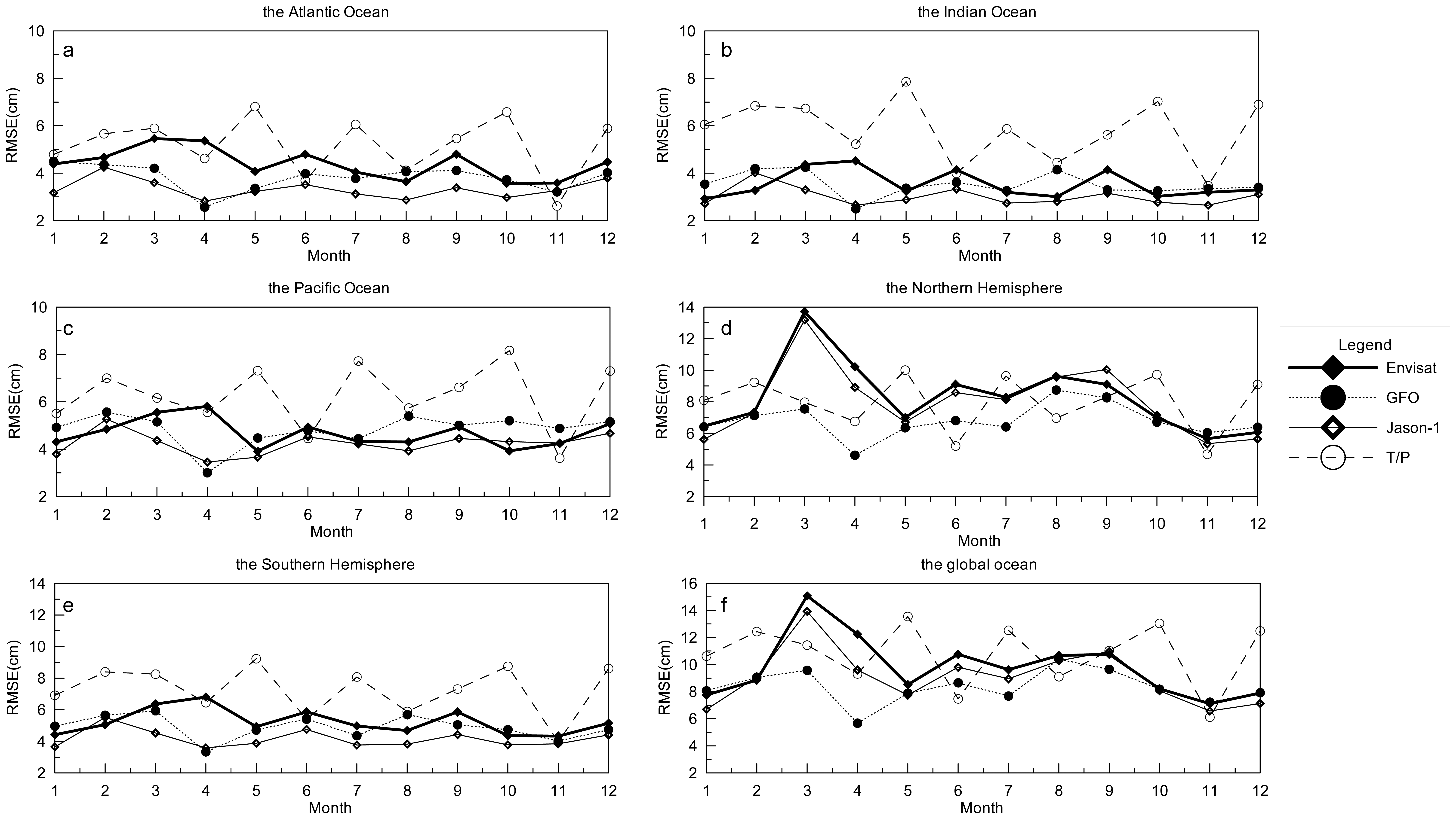
One year's simultaneous MSLA is not long enough for us to examine the discrepancy of interannual variation, but its intra-annual variation between February 2004 and March 2005 can be presented. RMSE evolution for each mission relative to the merged MSLA in the Atlantic Ocean, Indian Ocean, Pacific Ocean, Northern Hemisphere, Southern Hemisphere, and global ocean is shown as in Figures 5. An overall impression is that Envisat, GFO, and Jason-1 are all stable and consistent in time, while T/P is more variable in many regions. In the three oceans and SH, an obvious feature is that GFO and Jason-1 have the lowest RMSE in April, but Envisat seems much higher at the same time. Over the NH and global ocean, it is surprising that Envisat and Jason-1 enjoy a much similar evolution in time with the highest RMSE found in March, while GFO gets its lowest RMSE still in April (Figure 5d, 5e, 5f).
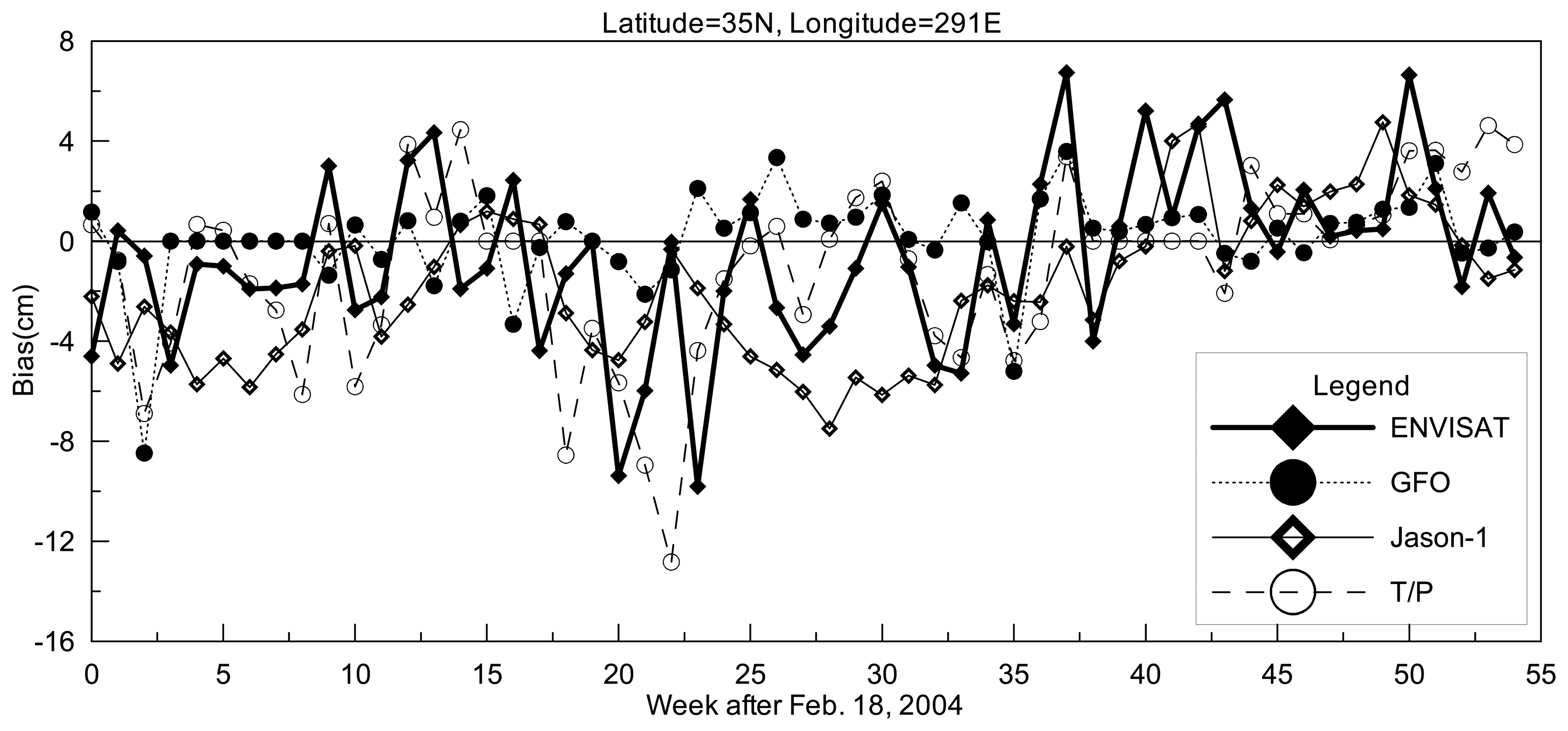
Furthermore, the bias evolution in time at a given location (35°N, 291°E), which is very close to the point (34.8°N, 291.5°E) with high mesoscale variability (in the Gulf Stream) chosen by Le Traon et al. [11], is presented in Figure 6, and we will compare our results with theirs. GFO is the most stable case, while T/P is the most variable one among them. The mean RMSEs at this location for Envisat, GFO, Jason-1, and T/P are 3.53cm, 1.86cm, 3.46cm, and 3.83cm, respectively, while the RMS of sea level signal at the given location is 12.13cm. Thus, such evolution in time will not be a problem for interpreting the large scale ocean variations.
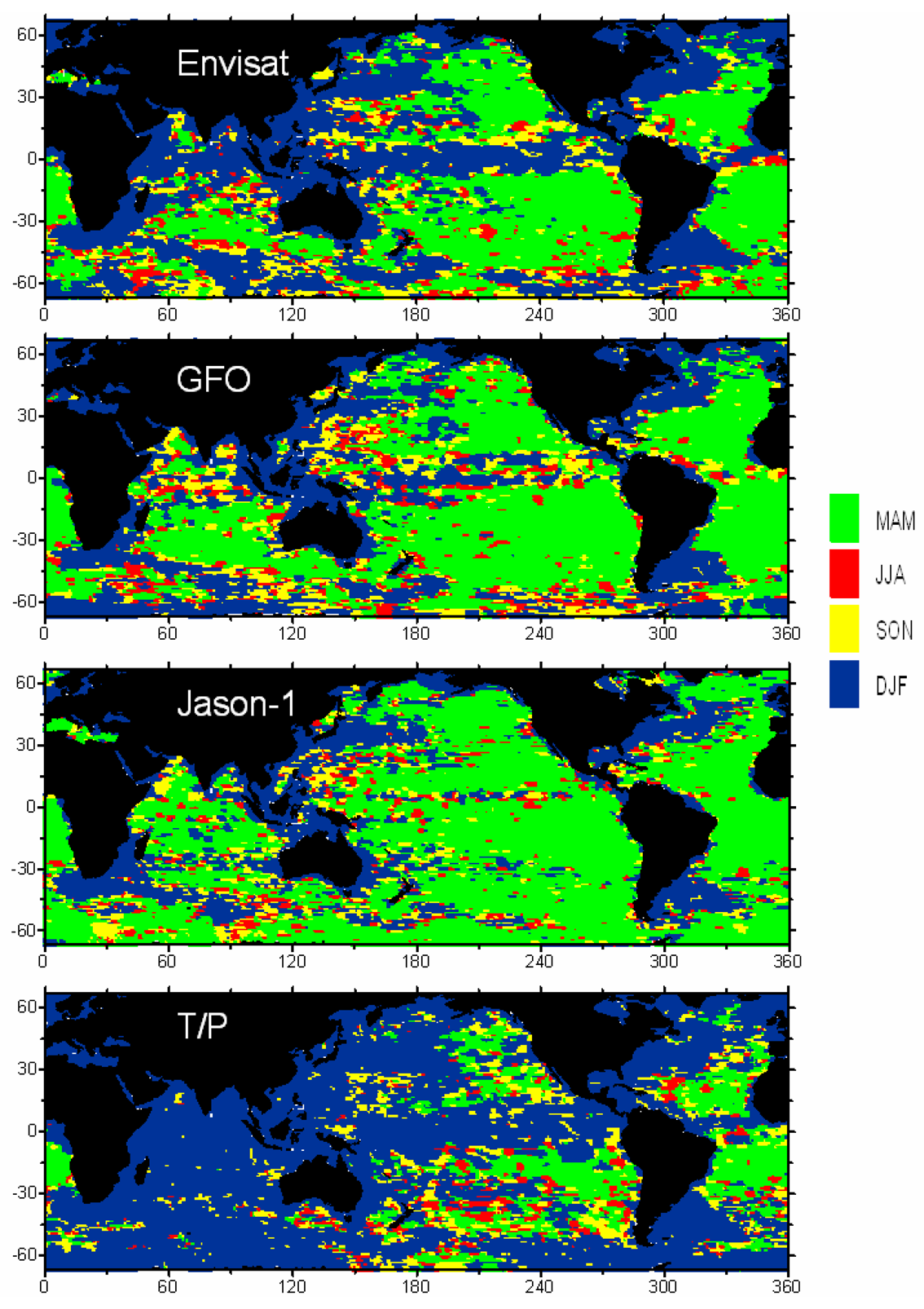
It is interesting to look at the phase information of RMSE relative to the merged MSLA and the results are displayed in Figures 7 and 8. It seems that the phase patterns are a little consistent with their corresponding RMSE distributions (Figure 2), with areas of high RMSE showing their maximum (minimum) discrepancy in March-May (December-February), and those of low RMSE showing their maximum (minimum) in December-February (March-May). No obvious transitional phase bands have been found. Except for T/P, the best mapping estimations at most oceanic regions for each mission is in March-May (Figure 8), while from December to next February, the poorest estimations have been presented in mapping (Figure 7). Meanwhile, T/P is out of phase with other three missions in structure, with most oceanic regions being well (poorly) mapped in December-February (March-May). The consistency between phase and RMSE distribution deserves further study.
3.4 Zonal and meridional distribution
RMSE and bias of Envisat, GFO, Jason-1, and T/P are plotted as a function of latitude and longitude in Figure 9. An examination of the meridional variation shows that the four missions have a similar dependence on latitude, with higher RMSE observed over tropical region, mid-latitude, and northernmost latitudes, lower RMSE observed over subtropical regions (Figure 9a). The high RMSE is closely connected with Equatorial currents, prevailing westerlies, and western boundary currents. The higher values over the northernmost latitudes is surprising, given the higher sampling of each mission of these regions than of low-latitude areas, while over the southernmost latitudes, much lower RMSE is observed. The asymmetry between them suggests that the difference of sea-ice distribution over these two regions has a deep impact on the accuracy of mapping sea level. Clearly note that T/P has the highest RMSE across latitude amongst the four missions, which seems unavoidable because of the short-period used for calculating mean profile of sea level anomaly extraction. The meridional bias seems more stable than the RMSE evolution, except for a large bias which happens around 40°N, where T/P is out of phase of other three missions (Figure 9b).
As far as the zonal variation is concerned, the most striking feature is that four peaks appear near 50°E, 120°E, 290°E, and 310°E, respectively (Figure 9c), especially the first spike along 50°E. The last three peaks are related to the Western Boundary Currents, while the first spike, which is far east of the Agulhas Current, may be derived from wrong estimations of four missions, extreme sea level variation in these bands, or few available satellite measurements over these regions to derive the realistic estimate (further scrutiny will be needed to ascertain the precise cause). The bias evolution is also stable, which possibly is derived from the computation of mean bias in time at given locations. However, the out of phase feature between T/P and other three missions around 50°E is also clearly displayed, which suggests that in order to get better mapping measurements at these bands, we can add MSLA of T/P to the average of other three missions to reduce the opposite bias.
3.5 Dependence on sea level variation
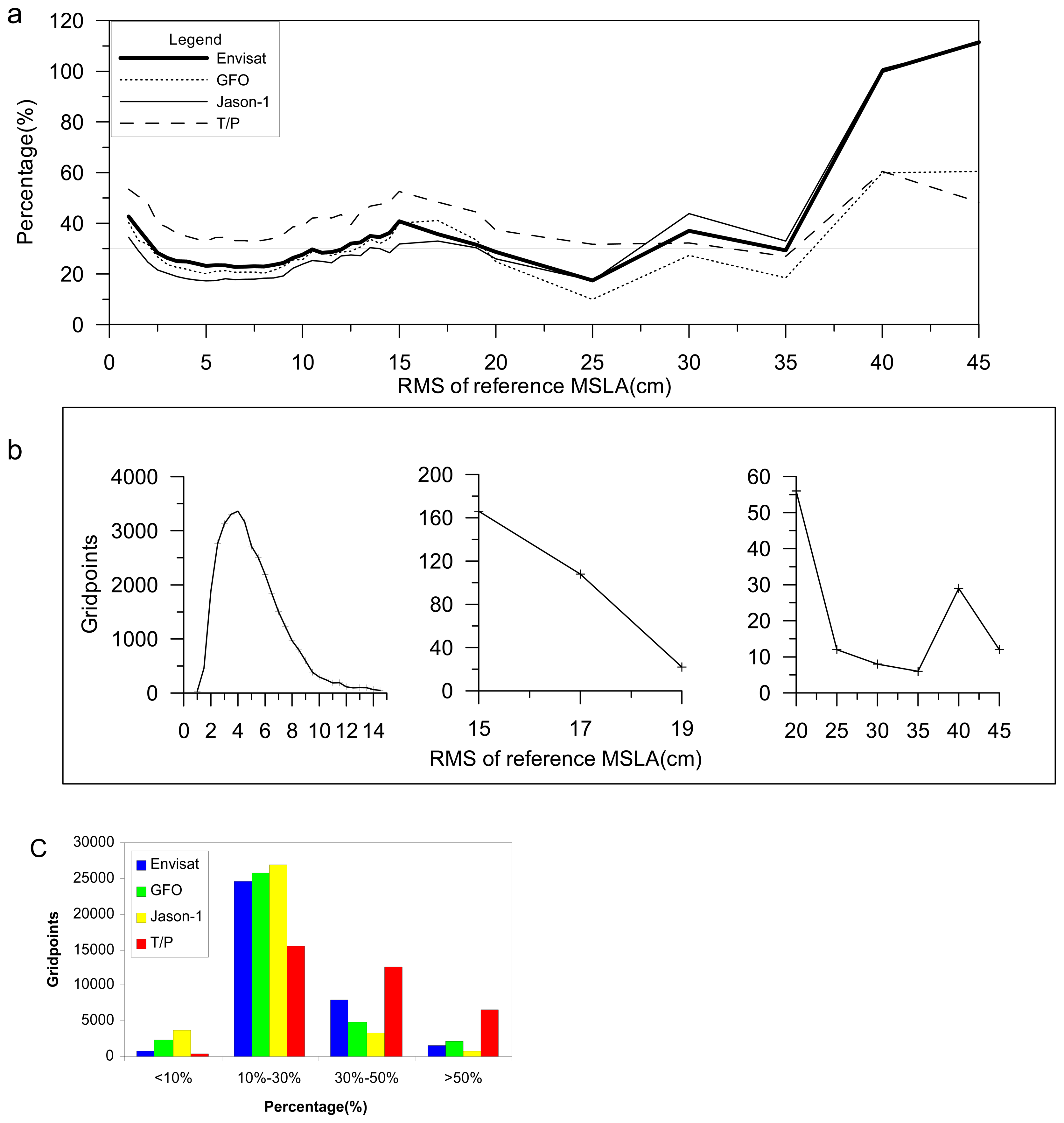
The comparison results have clearly illustrated that the mapping capability of each mission is closely connected with the strength of sea level variation. Thus, RMSE expressed as a percentage and a function of signal variance for Envisat, GFO, Jason-1, and T/P is presented in Figure 10a. The four missions share a very similar trend in signal retrieval. Envisat, GFO, and Jason-1 can map sea level variation well when RMS varies from 2cm to 10cm, and Jason-1 presents the best result, while Envisat displays the poorest estimations. Furthermore, note that most of signal variances are cumulated with RMS around 2-10cm (Figure 10b, the left panel). A decreasing trend in mapping capability has been observed around 10-15cm, and fortunately, only a small amount of gridpoints cumulated within it. To examine the statistical significance for signals with RMSs more than 15cm, we bin RMSs every 2cm in 15-20cm and every 5 cm afterwards, and their associated cumulative plots are presented in Figure 10b (the middle and right panels). It seems that when RMS is more than 17cm, the results presented in the right-hand side of Figure 10a are meaningless due to the small number of gridpoints in each bin.
For a better understanding of the relationship between RMSE and RMS, a histogram plot binned by the signal retrieval is presented in Figure 10c. Note that RMSE expressed as a percentage of RMS of each gridpoint is mainly accumulated within 10%-30%, in which Jason-1 presents the best result, while around 30%-50%, the lowest number of gridpoints of Jason-1 further confirms its mapping capability for large scale of sea level variation. For the best signal retrieval with RMSE only contributing 10% to sea level variation of each mission, Jason-1 still gives the best mapping case due to its largest gridpoints amount among them.
4. Conclusion
Four altimeter missions, Envisat, GFO, Jason-1, and T/P, flying concurrently in orbit and producing operational near-real time sea level data by AVISO since February 2004, provide us with the opportunity to evaluate the mapping capability of large scale sea level variation by each altimeter. Using about one-year's simultaneous MSLA products between February 18, 2004 and March 2, 2005, a series of statistical comparisons are conducted in this paper. The merged MSLA product from all four altimeters has been selected as the reference field. Our main conclusions are summarized as follows:
- (1)
- Being designed as an optimal measurement for large scale ocean variation, Jason-1 is the best single-satellite mission to produce MSLA data, which can be nicely verified by its much more homogeneous low RMSE in geographical distribution, stable in time evolution, as well as its signal retrieval of sea level variation.
- (2)
- With orbit cycle configured between Jason-1 and Envisat, GFO also enjoys good capability to map the large scale ocean variation and only has a difference of 0.2cm RMSE compared with Jason-1 both in regional and global spatial mean. Furthermore, its time evolution of RMSE and bias is the most stable mission among four missions.
- (3)
- Envisat, being thought to be more suitable to measure the mesoscale ocean variation, indeed has a lower capability to map the large scale sea level variation, which is proved by its large area with higher RMSE, its variable evolution in time, and its larger cumulation for larger RMSE expressed as the percentage of RMS of reference MSLA field (Figure 10c).
- (4)
- Even though RMSE of T/P MSLA product has a similar pattern to the other three missions in time evolution, zonal and meridional variation, and dependence on RMS of reference of MSLA, it still seems that it has the poorest mapping result in its new orbit, which is mainly caused by the inconsistent mean profile of T/P with other three missions.
- (5)
- Because of the homogenous processing of MSLA data, Envisat, GFO, and Jason-1 share much consistency, such as the poor measurement over high variability areas, better (worse) mapping in MAM (DJF) for most oceanic regions, and similar evolution along latitude and longitude, as well as dependence on signal variance.
- (6)
- An interesting feature is that the MSLA estimation is closely connected with seasonal variation. Most oceanic regions are best (worst) estimated in MAM (DJF), although this is based on only one year's MSLA statistics.
The mapping capability for large scale sea level variation of each mission is well measured based on the statistical analysis of RMSE, which provides us with some significant information for the improvement of operational mapping products and optimal selection of each product in applications when one of the missions is, at some time or for some regions, unavailable. The current MSLA product from T/P in its new orbit seems unsuitable for large scale ocean studies, and its application for assimilation into numerical models is not suggested by our results. It is expected that the MSLA data from T/P in its new orbit will improve once more T/P measurements are used to construct the mean profile, and hopefully its performance would be comparable to the Jason-1 results in the end.
Acknowledgments
The authors would like to thank the three anonymous reviewers for their detailed comments and constructive suggestions. We also wish to thank Dr. Zuojun Yu for going through the manuscript and her helpful discussions. This research was jointly supported by the National Basic Research Program of China under Project 2005CB422308, and the Natural Science Foundation of China under Project 40545018.
References
- Fu, L. L.; Chelton, D. Large-scale Ocean Circulation. In Satellite Altimetry and Earth Sciences. A Handbook of Techniques and Application; Fu, L-L., Cazenave, A., Eds.; Academic Press, 2001; pp. 133–169. [Google Scholar]
- Picaut, J.; Busalacchi, A.J. Tropical Ocean Variability. In Satellite Altimetry and Earth Sciences. A Handbook of Techniques and Application; Fu, L-L., Cazenave, A., Eds.; Academic Press, 2001; pp. 217–236. [Google Scholar]
- Evans, D.L.; Alpers, W.; Cazenave, A.; Elachi, C.; Farr, T.; Glackin, D.; Holt, B.; Jones, L.; Liu, W.T.; McCandless, W.; Menard, Y.; Moore, R.; Njoku, E. Seasat - A 25-year Legacy of Success. Remote Sensing Environment 2005, 94, 384–404. [Google Scholar]
- Douglas, B.C.; Cheney, R. E. Geosat: Beginning a New Era in Satellite Oceanography. J. Geophys. Res. 1990, 95, 2833–2836. [Google Scholar]
- Fu, L.L.; Christensen, E. J.; Yamarone, C. A., Jr; Lefevre, M.; Ménard, Y.; Dorrer, M.; Escudier, P. TOPEX/Poseidon Mission Overview. J. Geophys. Res. 1994, 99, 24369–24381. [Google Scholar]
- Leuliette, E.W.; Nerem, R. S.; Mitchum, G. T. Calibration of TOPEX/Poseidon and Jason Altimeter Data to Construct a Continuous Record of Mean Sea Level Change. Marine Geodesy 2004, 27, 79–94. [Google Scholar]
- Hernandez, F.; Le Traon, P.Y.; Morrow, R. Mapping Mesoscale Variability of the Azores Current Using TOPEX/Poseidon and ERS 1 Altimetry, Together with Hydrographic and Lagrangian Measurements. J. Geophys. Res. 1995, 100, 24995–25006. [Google Scholar]
- Le Traon, P.Y.; Nadal, F.; Ducet, N. An Improved Mapping Method of Multisatellite Altimeter Data. J. Atmos. Oceanic Technol. 1998, 15, 522–534. [Google Scholar]
- Ducet, N.; Le Traon, P.Y.; Reverdin, G. Global High-resolution Mapping of Ocean Circulation from TOPEX/Poseidon and ERS-1 and –2. J. Geophys. Res. 2000, 105, 19477–19498. [Google Scholar]
- Le Traon, P.Y.; Dibarboure, G. Mesoscale Mapping Capabilities of Multi-satellite Altimeter Missions. J. Atmos. Oceanic Technol. 1999, 16, 1208–1223. [Google Scholar]
- Le Traon, P.Y.; Dibarboure, G.; Ducet, N. Use of High-resolution Model to Analyze the Mapping Capabilities of Multiple-altimeter Missions. J. Atmos. Oceanic Technol. 2001, 18, 1277–1288. [Google Scholar]
- Le Traon, P.Y.; Dibarboure, G. An Illustration of the Contribution of the TOPEX/Poseidon—Jason-1 Tandem Mission to Mesoscale Variability Studies. Marine Geodesy 2004, 27, 3–13. [Google Scholar]
- Chen, G.; Quartly, G.D. Annual Amphidromes: A Common Feature in the Ocean? IEEE Geoscience and Remote Sensing Letters 2005, 2, 423–427. [Google Scholar]
- AVISO. SSALTO/DUACS User Handbook: (M)SLA and (M)ADT Near-real Time and Delayed Time Products. In SALP-MU-P-EA-21065-CLS; 2004; CLS. [Google Scholar]
- Le Traon, P.Y.; Faugère, Y.; Hernandez, F.; Dorandeu, J.; Mertz, F.; Ablain, M. Can We Merge GEOSAT Follow-On with TOPEX/Poseidon and ERS-2 for an Improved Description of the Ocean Circulation? J. Atmos. Oceanic Technol. 2003, 20, 889–895. [Google Scholar]
Figure 1.
RMS of merged MSLA data based on four altimeters (Envisat, GFO, Jason-1, T/P) between February 18, 2004 and March 2, 2005.
Figure 1.
RMS of merged MSLA data based on four altimeters (Envisat, GFO, Jason-1, T/P) between February 18, 2004 and March 2, 2005.
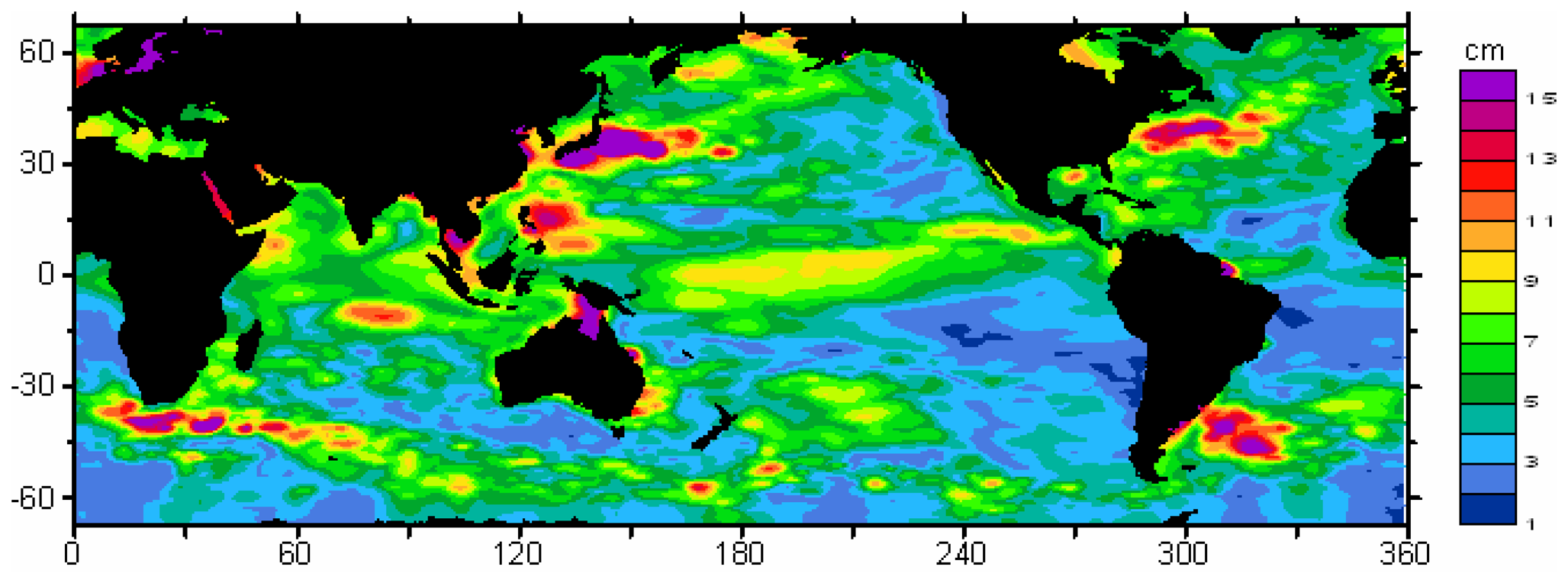
Figure 2.
Geographical distributions of RMSE with respect to the merged MSLA for Envisat, GFO, Jason-1, and T/P. The merged MSLA is derived from a combination of simultaneous Envisat, GFO, Jason-1, and T/P estimations from Feb.18, 2004 to Mar. 2, 2005.
Figure 2.
Geographical distributions of RMSE with respect to the merged MSLA for Envisat, GFO, Jason-1, and T/P. The merged MSLA is derived from a combination of simultaneous Envisat, GFO, Jason-1, and T/P estimations from Feb.18, 2004 to Mar. 2, 2005.
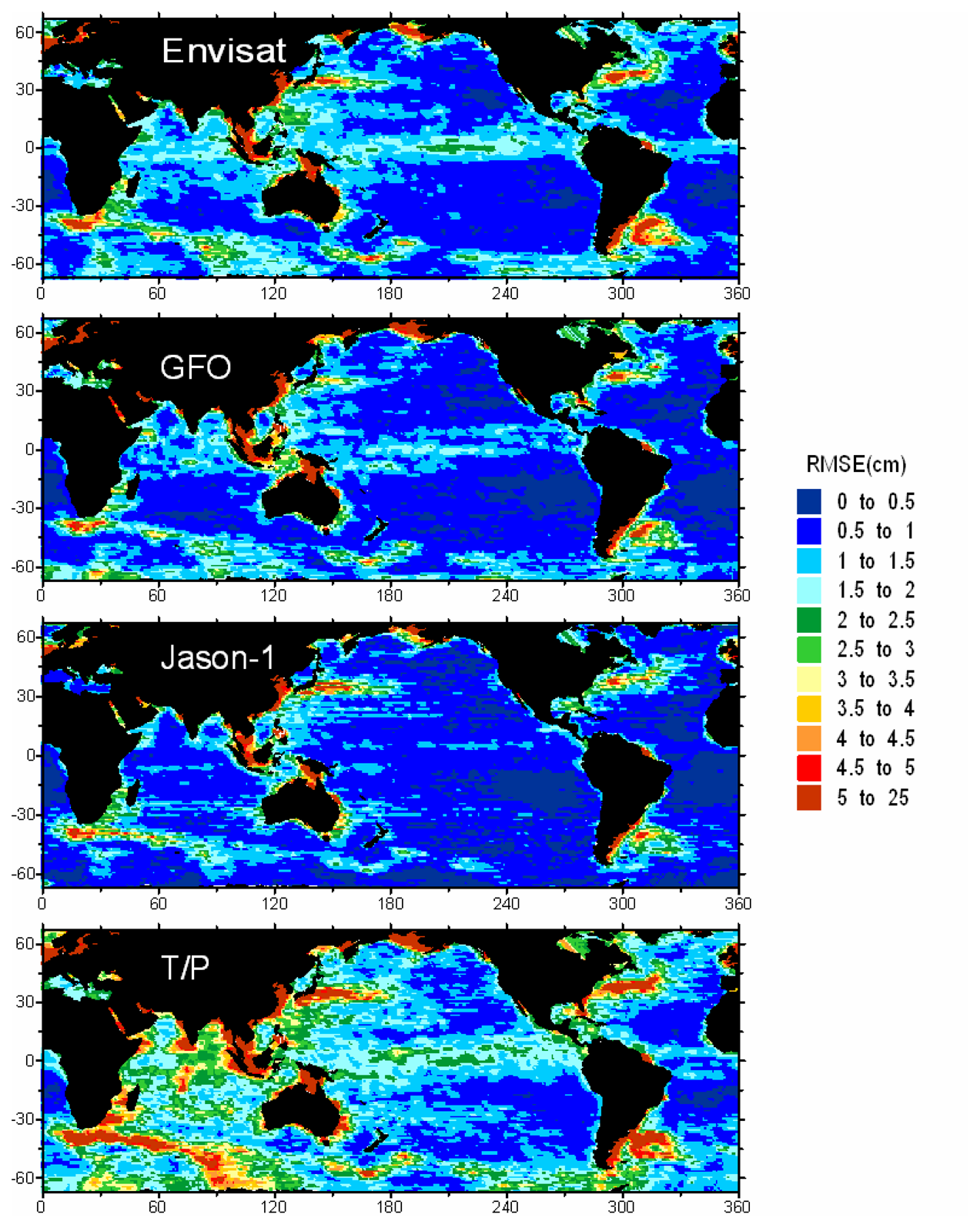
Figure 3.
Same as Figure 2 except for being expressed as a percentage of the signal variance.
Figure 3.
Same as Figure 2 except for being expressed as a percentage of the signal variance.

Figure 4.
Histogram of RMSE (Unit:cm) with respect to the merged MSLA for Envisat, GFO, Jason-1, and T/P over the Atlantic Ocean (AO), Indian Ocean (IO), Pacific Ocean (PO), Northern Hemisphere (NH), Southern Hemisphere (SH), and global ocean (GO).
Figure 4.
Histogram of RMSE (Unit:cm) with respect to the merged MSLA for Envisat, GFO, Jason-1, and T/P over the Atlantic Ocean (AO), Indian Ocean (IO), Pacific Ocean (PO), Northern Hemisphere (NH), Southern Hemisphere (SH), and global ocean (GO).
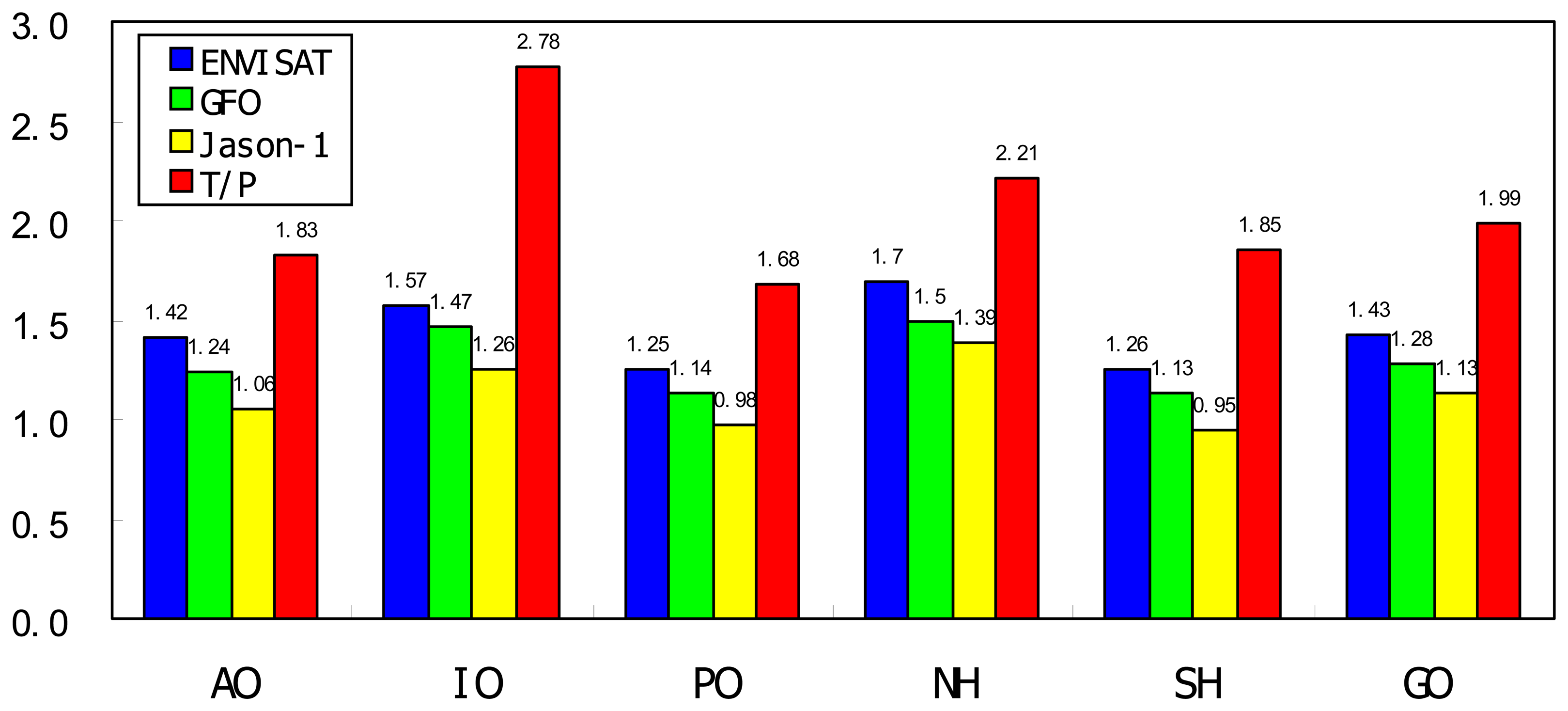
Figure 5.
Evolution in time of RMSE relative to the merged MSLA for Envisat, GFO, Jason-1, and T/P at the (a) Atlantic Ocean, (b) Indian Ocean, (c) Pacific Ocean, (d) Northern Hemisphere, (e) Southern Hemisphere, and (f) global ocean.
Figure 5.
Evolution in time of RMSE relative to the merged MSLA for Envisat, GFO, Jason-1, and T/P at the (a) Atlantic Ocean, (b) Indian Ocean, (c) Pacific Ocean, (d) Northern Hemisphere, (e) Southern Hemisphere, and (f) global ocean.
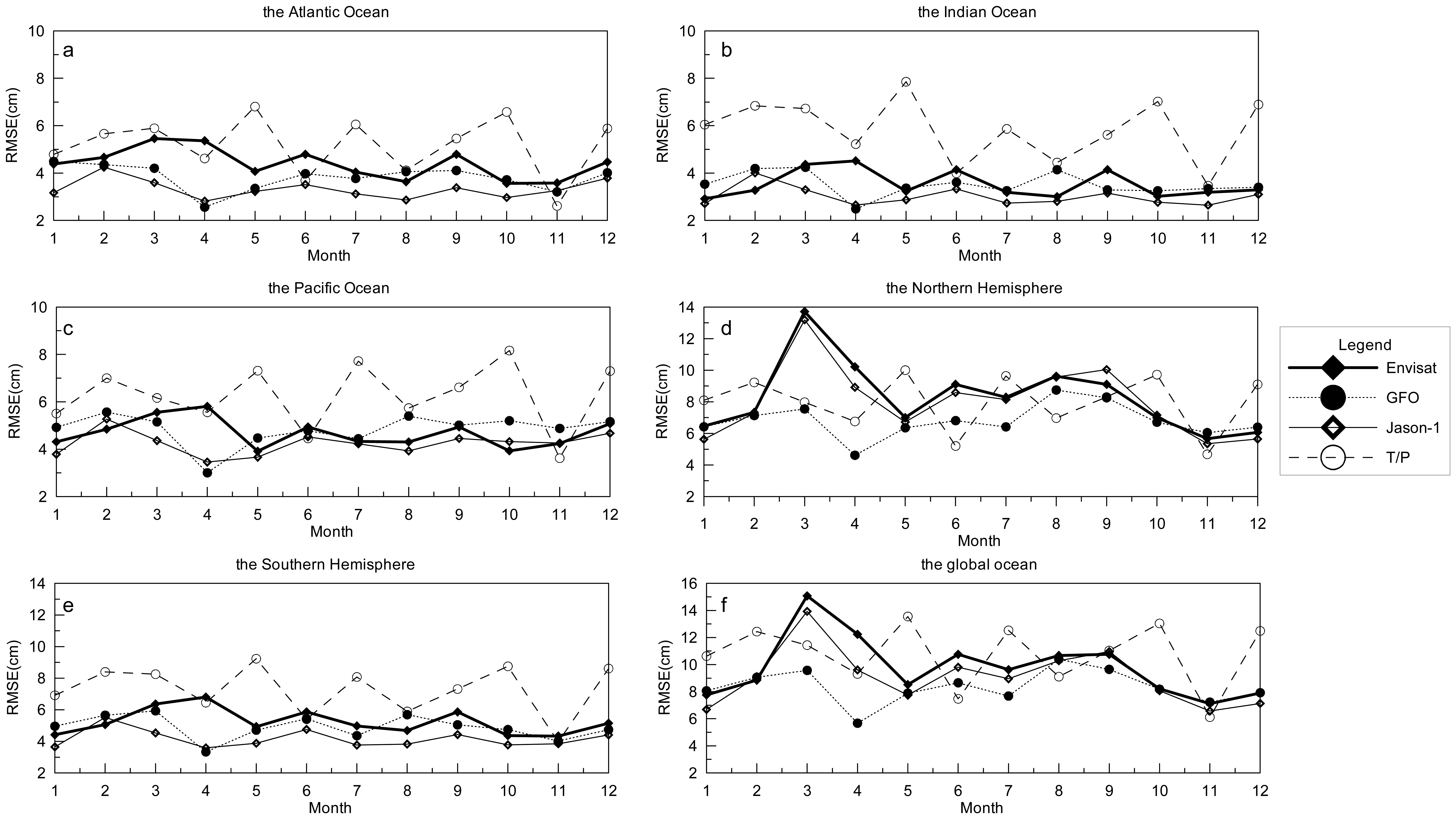
Figure 6.
Evolution in time of bias relative to the merged MSLA at 35°N, 291°E for Envisat, GFO, Jason-1 and T/P.
Figure 6.
Evolution in time of bias relative to the merged MSLA at 35°N, 291°E for Envisat, GFO, Jason-1 and T/P.
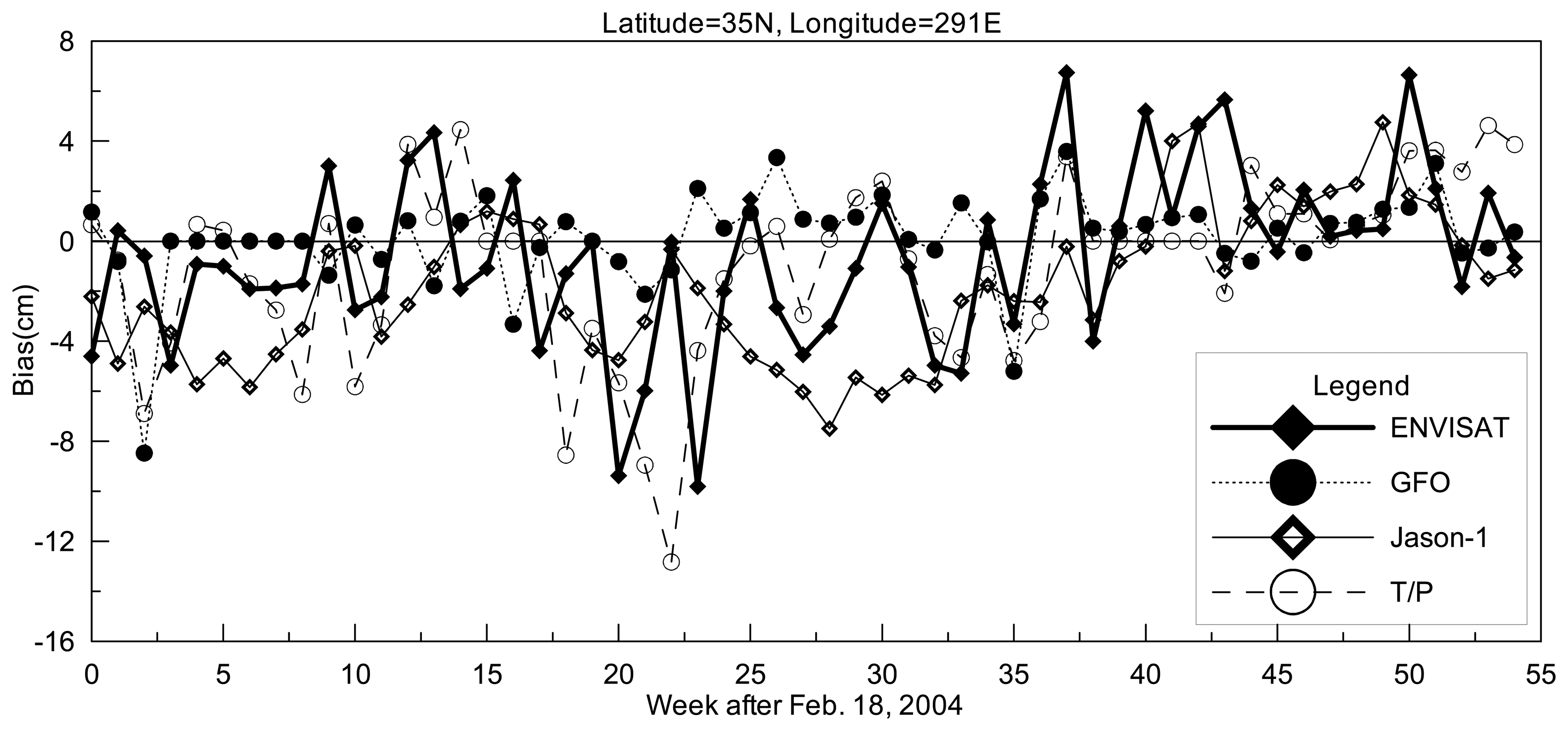
Figure 7.
Geographical distributions of timing of maximum RMSE with respect to the merged MSLA for Envisat, GFO, Jason-1, and T/P.
Figure 7.
Geographical distributions of timing of maximum RMSE with respect to the merged MSLA for Envisat, GFO, Jason-1, and T/P.
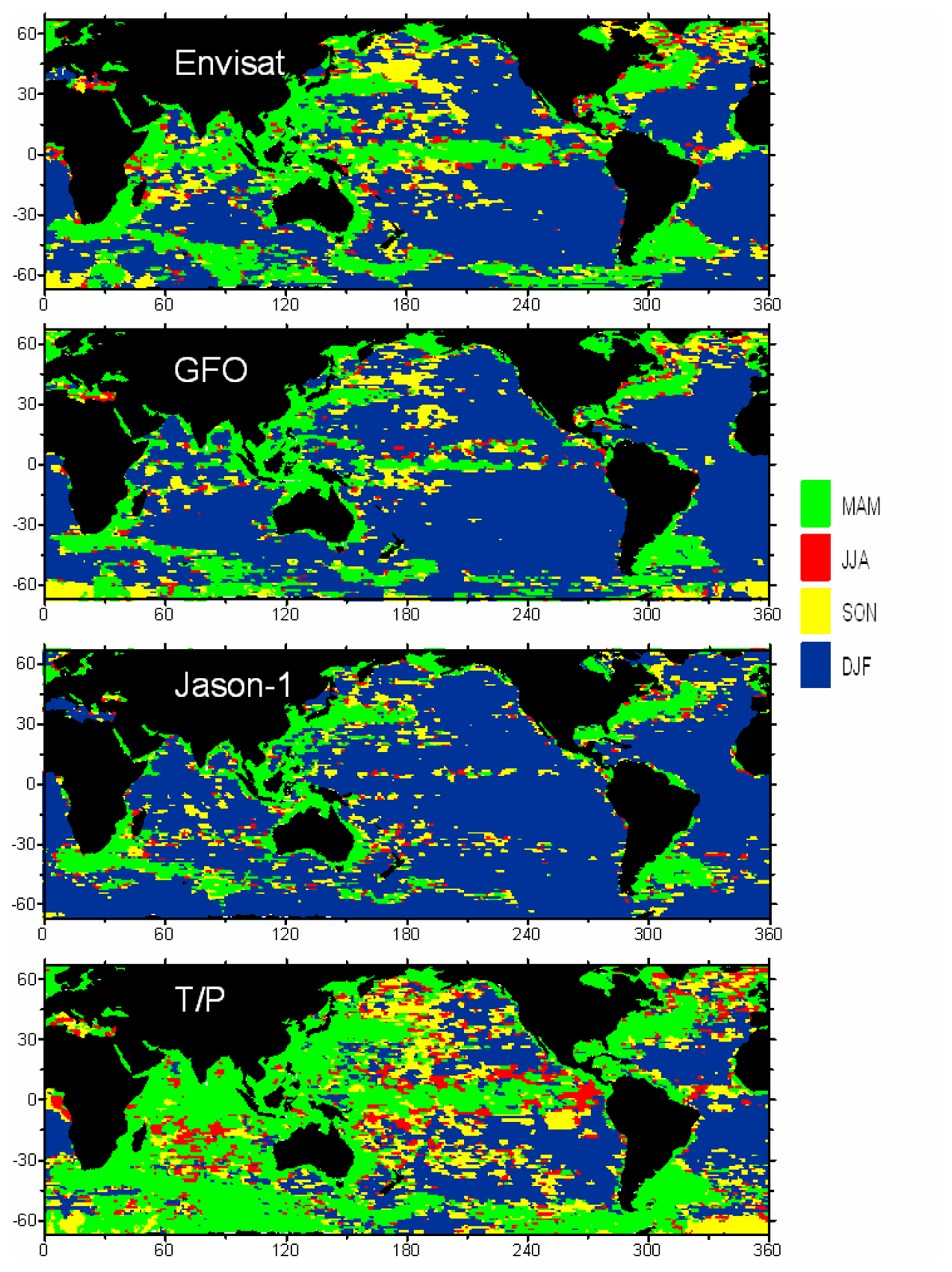
Figure 8.
Geographical distributions of timing of minimum RMSE with respect to the merged MSLA for Envisat, GFO, Jason-1, and T/P.
Figure 8.
Geographical distributions of timing of minimum RMSE with respect to the merged MSLA for Envisat, GFO, Jason-1, and T/P.
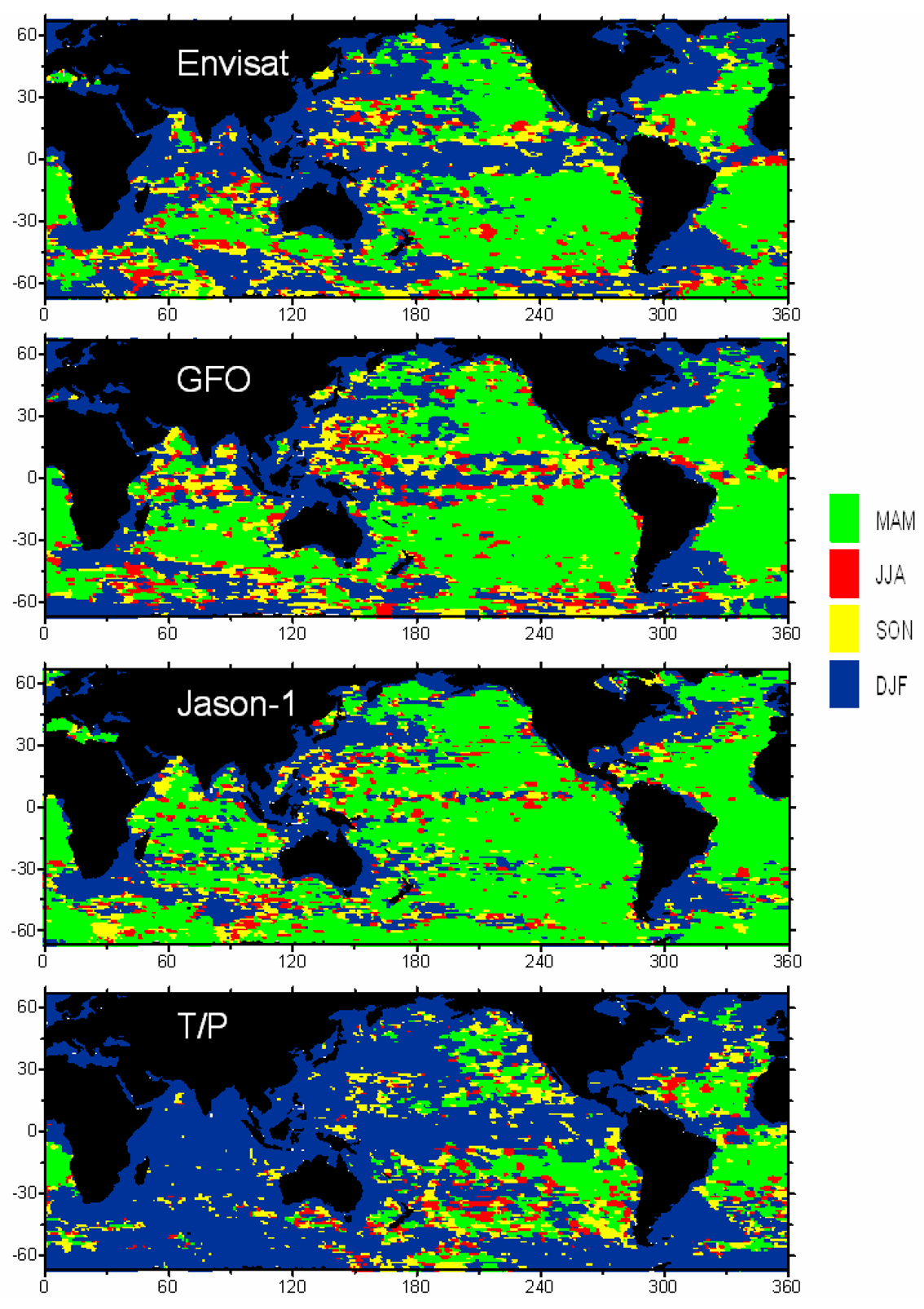
Figure 9.
(a), (c) RMSE and (b), (d) bias relative to the merged MSLA as a function of latitude and longitude.
Figure 9.
(a), (c) RMSE and (b), (d) bias relative to the merged MSLA as a function of latitude and longitude.
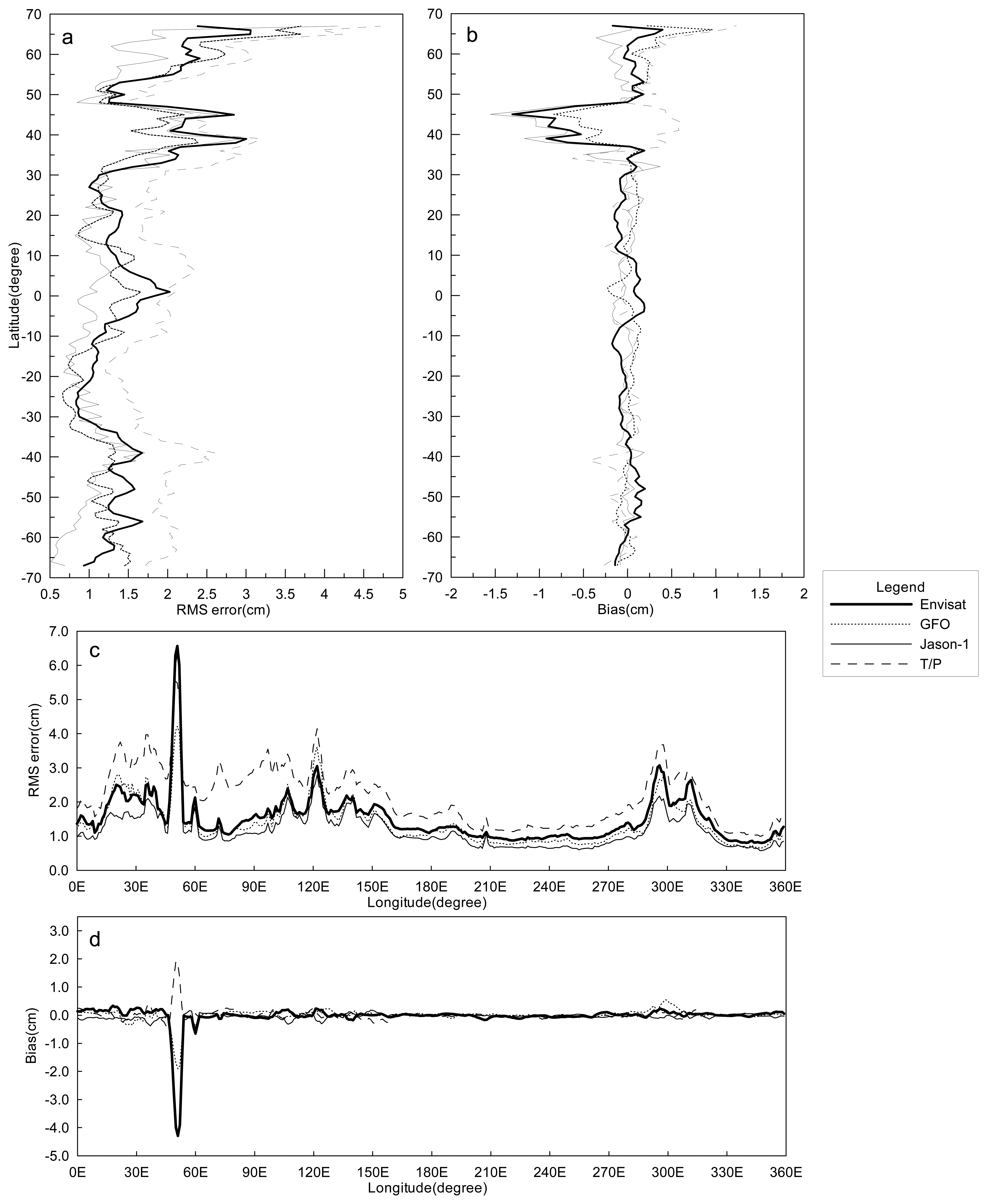
Figure 10.
(a) RMSE expressed as percentage of RMS as a function of RMS of reference sea level anomaly for Envisat, GFO, Jason-1, and T/P, respectively. (b) cumulative distribution as a function of RMS, and (c) RMSE histogram binned by its signal retrieval.
Figure 10.
(a) RMSE expressed as percentage of RMS as a function of RMS of reference sea level anomaly for Envisat, GFO, Jason-1, and T/P, respectively. (b) cumulative distribution as a function of RMS, and (c) RMSE histogram binned by its signal retrieval.
© 2006 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
MDPI and ACS Style
Zhang, C.; Chen, G. A First Comparison of Simultaneous Sea Level Measurements from Envisat, GFO, Jason-1, and TOPEX/Poseidon. Sensors 2006, 6, 235-248. https://doi.org/10.3390/s6030235
AMA Style
Zhang C, Chen G. A First Comparison of Simultaneous Sea Level Measurements from Envisat, GFO, Jason-1, and TOPEX/Poseidon. Sensors. 2006; 6(3):235-248. https://doi.org/10.3390/s6030235
Chicago/Turabian StyleZhang, Caiyun, and Ge Chen. 2006. "A First Comparison of Simultaneous Sea Level Measurements from Envisat, GFO, Jason-1, and TOPEX/Poseidon" Sensors 6, no. 3: 235-248. https://doi.org/10.3390/s6030235