



A Framework for Optimal Navigation in Situations of Localization Uncertainty

Abstract
:1. Introduction
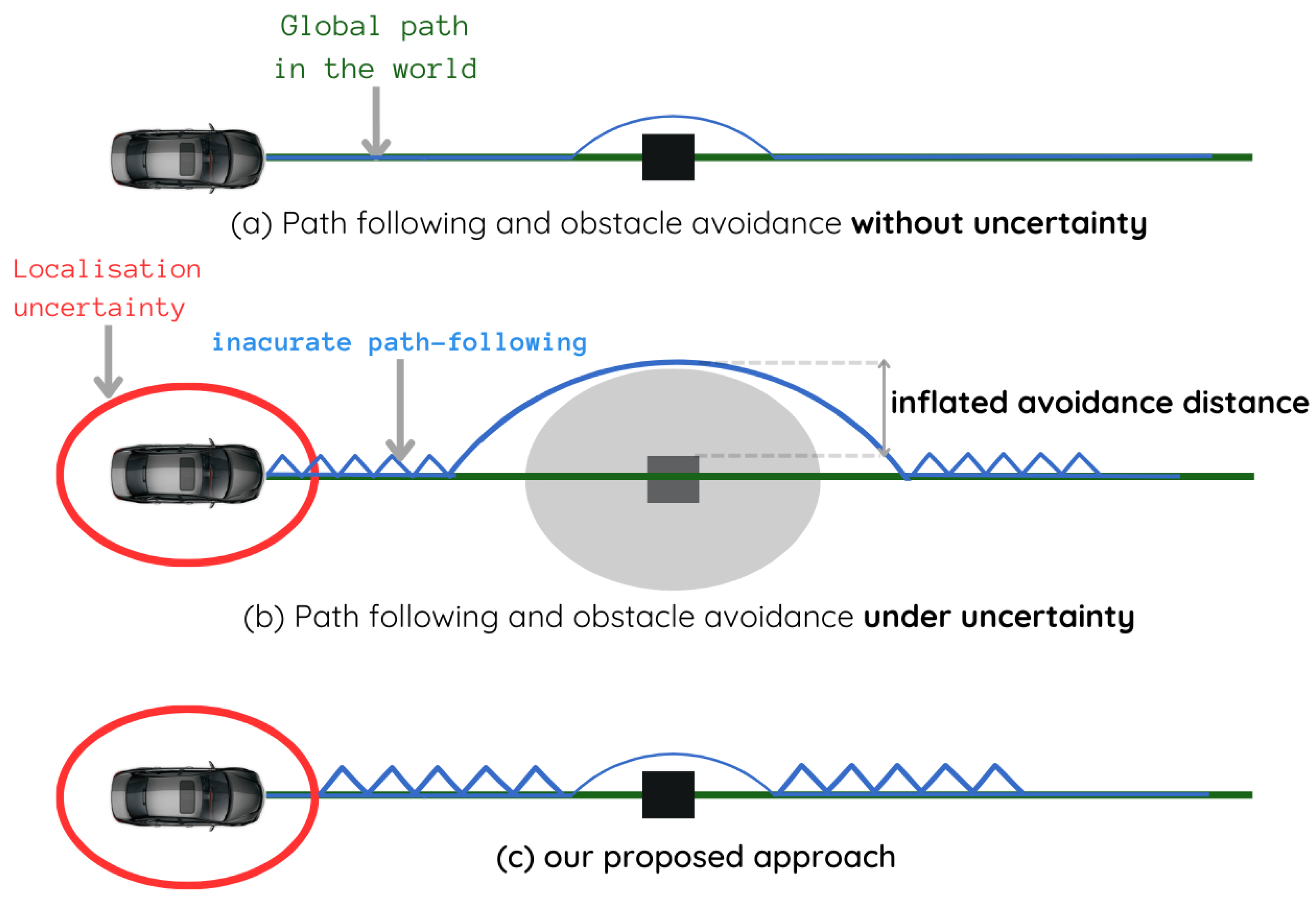
- A criterion for path following in the presence of uncertainty.
- An obstacle avoidance approach that is robust against localization uncertainty,
- A framework that optimally unifies path-following and obstacle avoidance by keeping each objective in the preferred frame of reference.
- Results from real experiments with a real autonomous shuttle for two different scenarios, namely, navigating in the absence and presence of localization uncertainties.
2. Related Work
2.1. Planning and Navigation
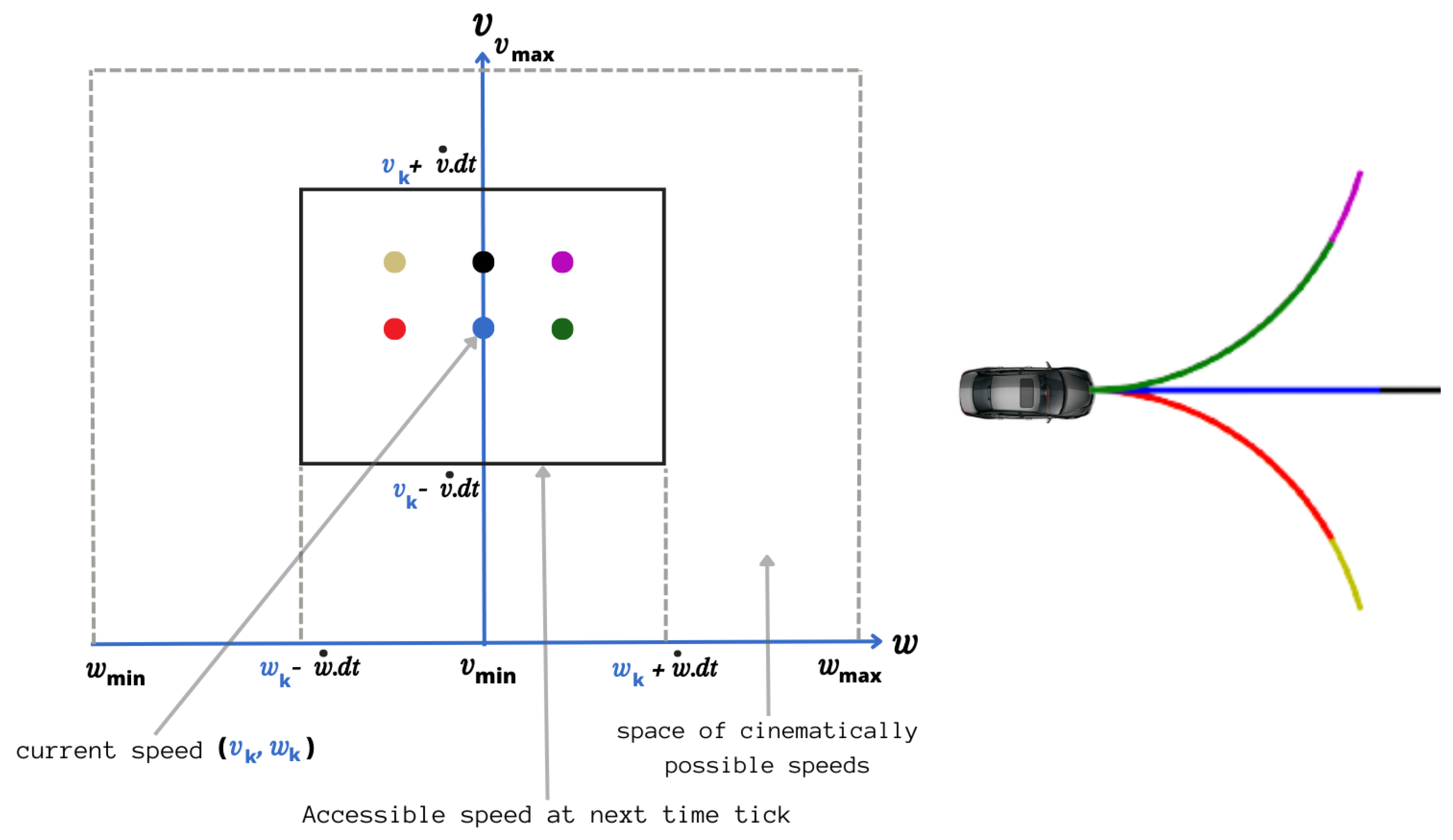
2.1.1. Dynamic Windows Approach
2.1.2. Tentacles-Based Approach
- Tentacle clearance, i.e., the distance to the nearest obstacle ()
- Smoothness of steering () as a function of the variation in tentacle curvature
- Convergence towards a reference trajectory to follow ().
2.2. Navigation under Localization Uncertainty
3. Proposed Approach
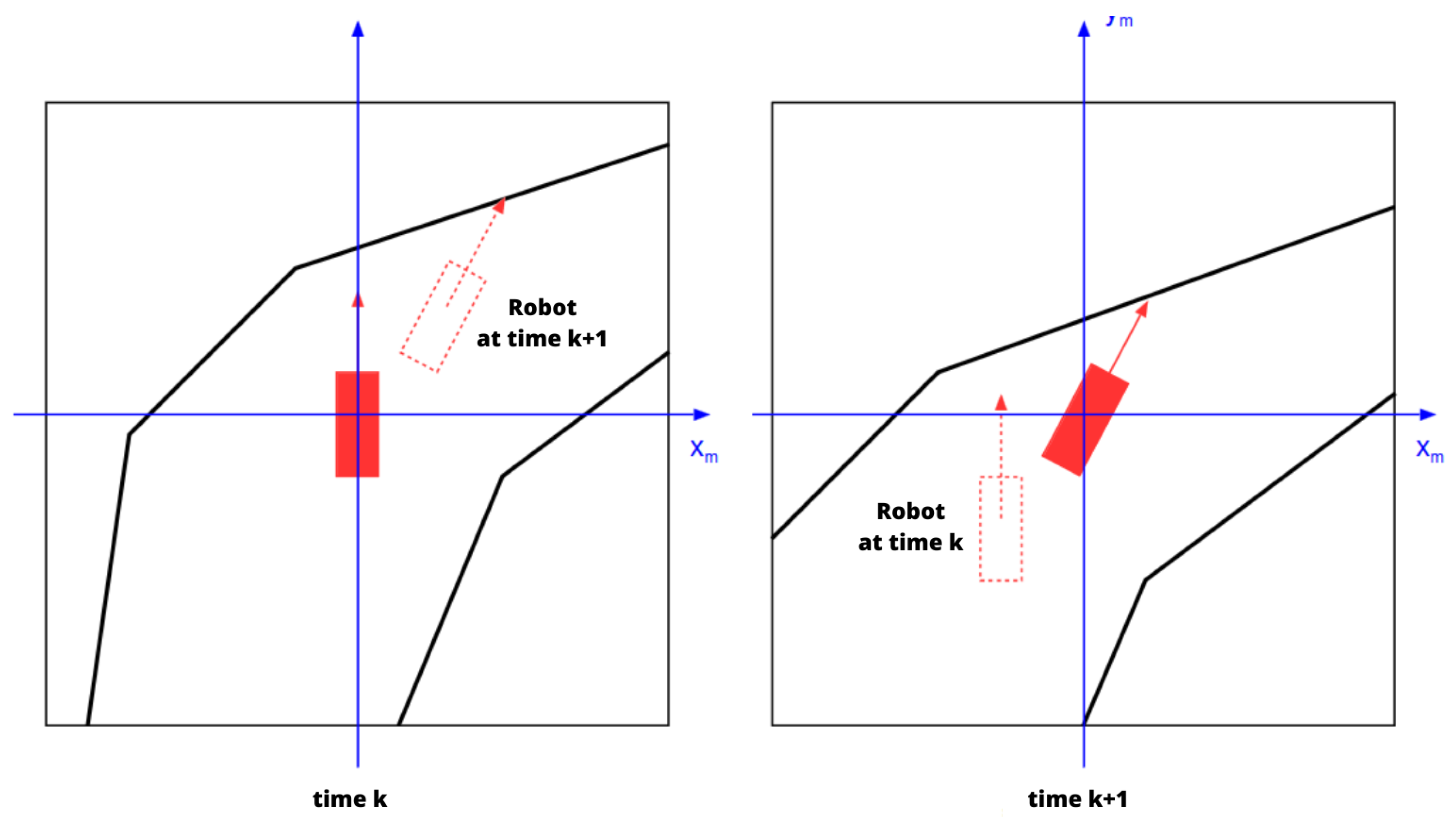
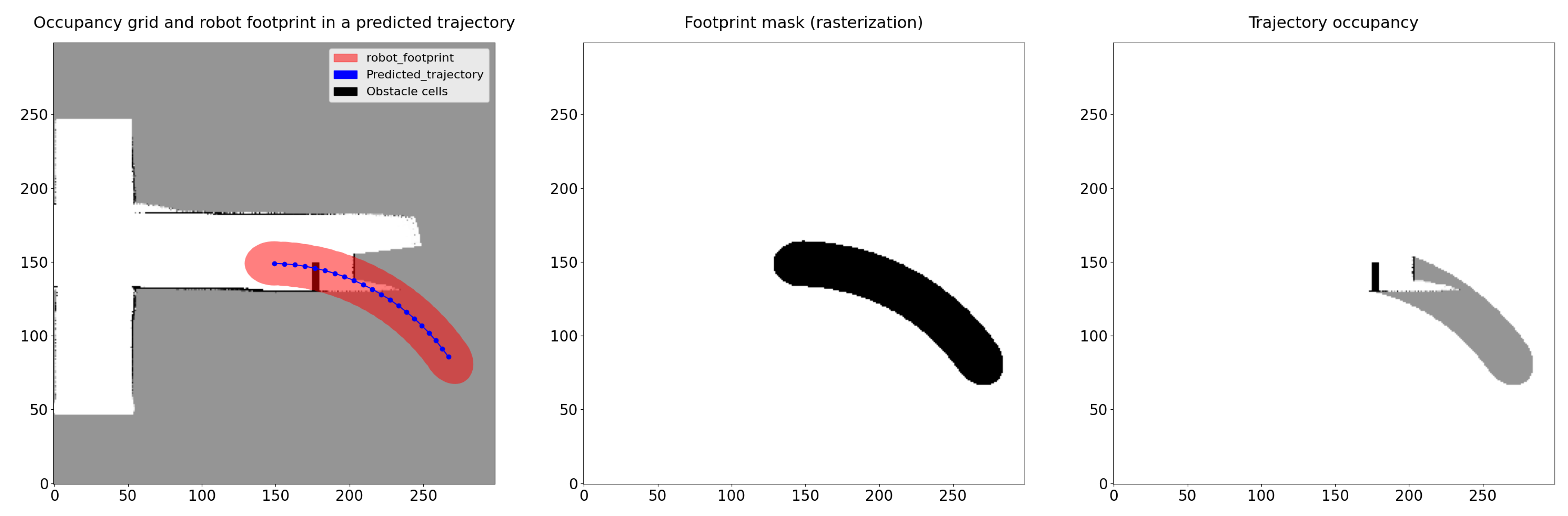
3.1. Environement Model
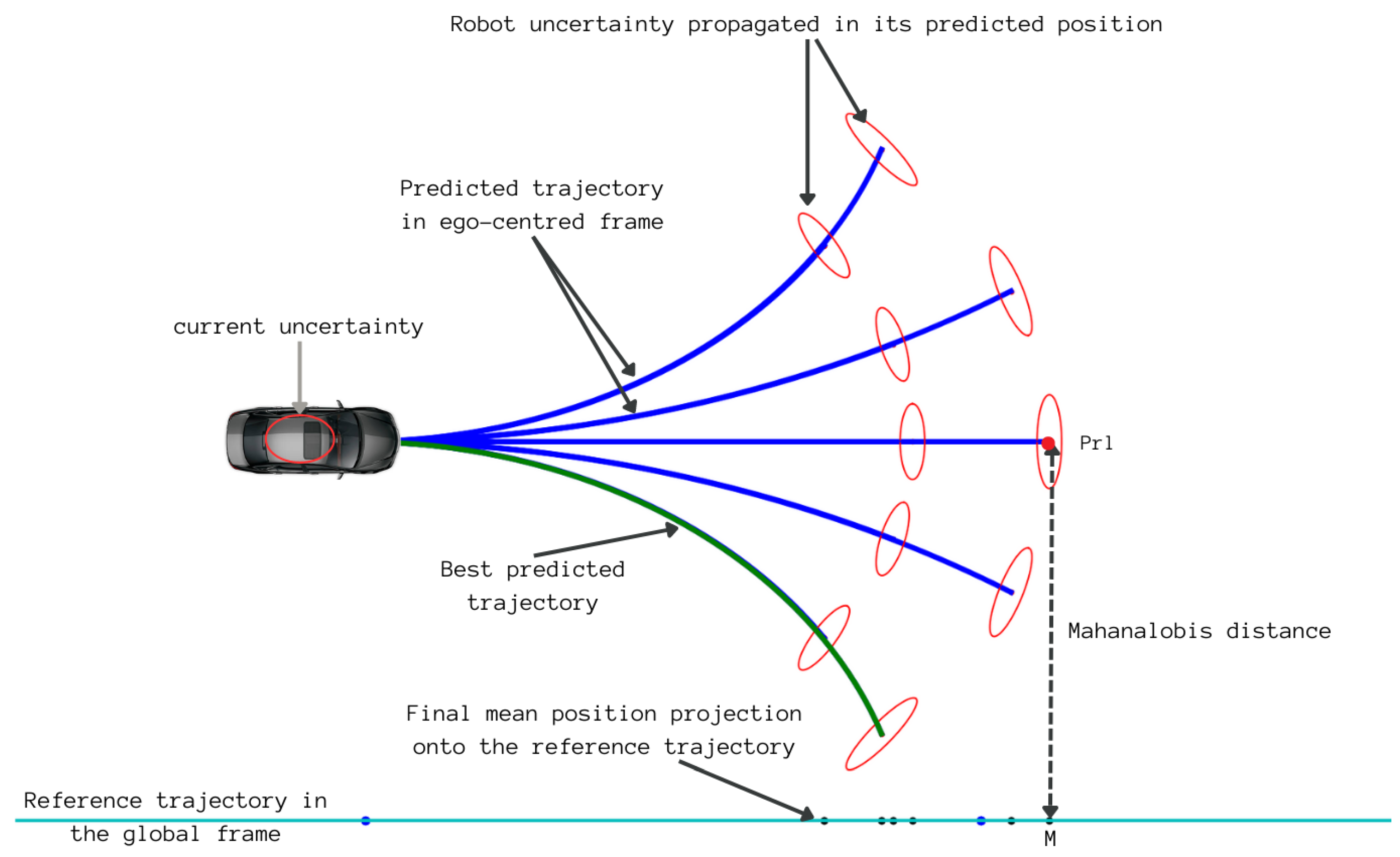
3.2. Path-Following Criterion
3.3. Obstacle Avoidance Criterion
3.4. Global Cost
4. Experiments and Results
4.1. Setup
4.1.1. PAVIN Plateform
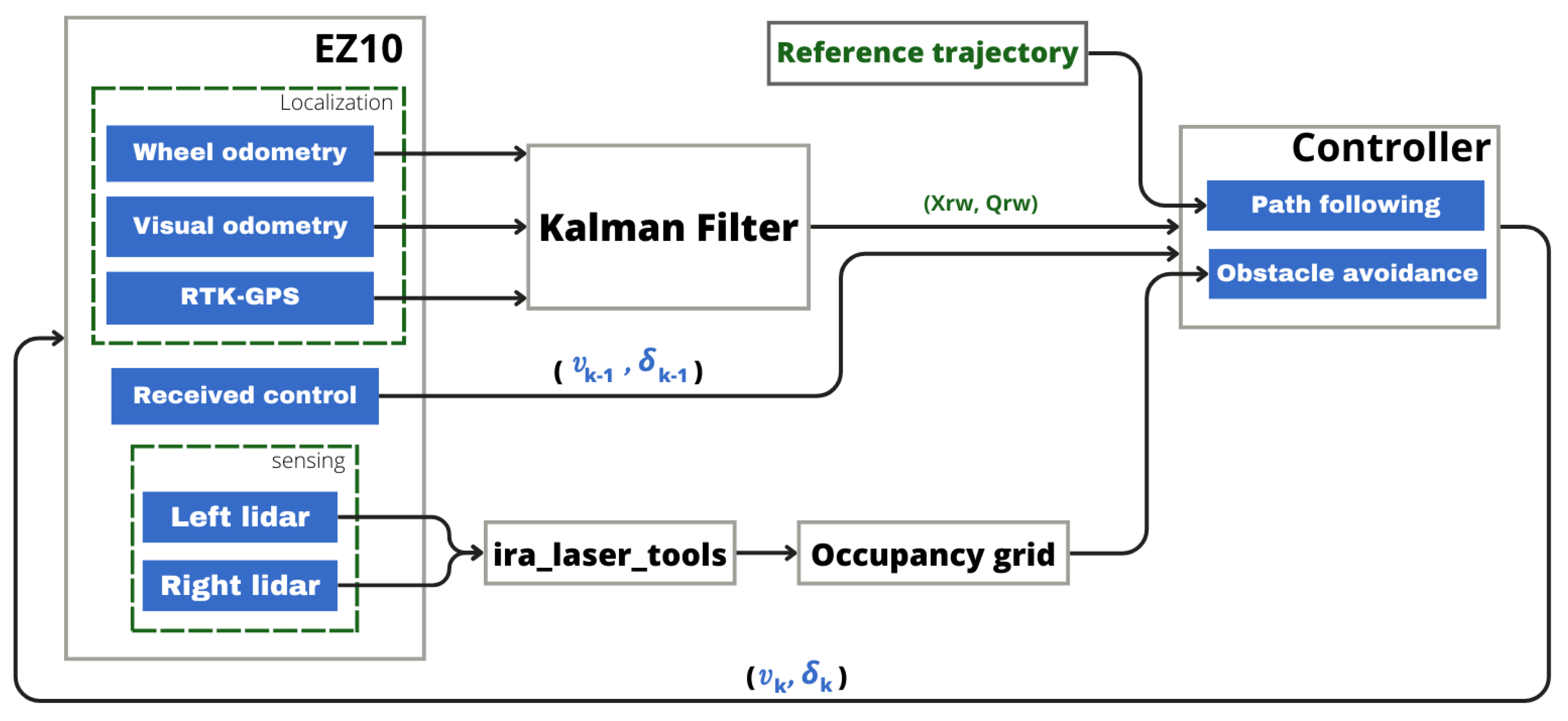
4.1.2. EZ10
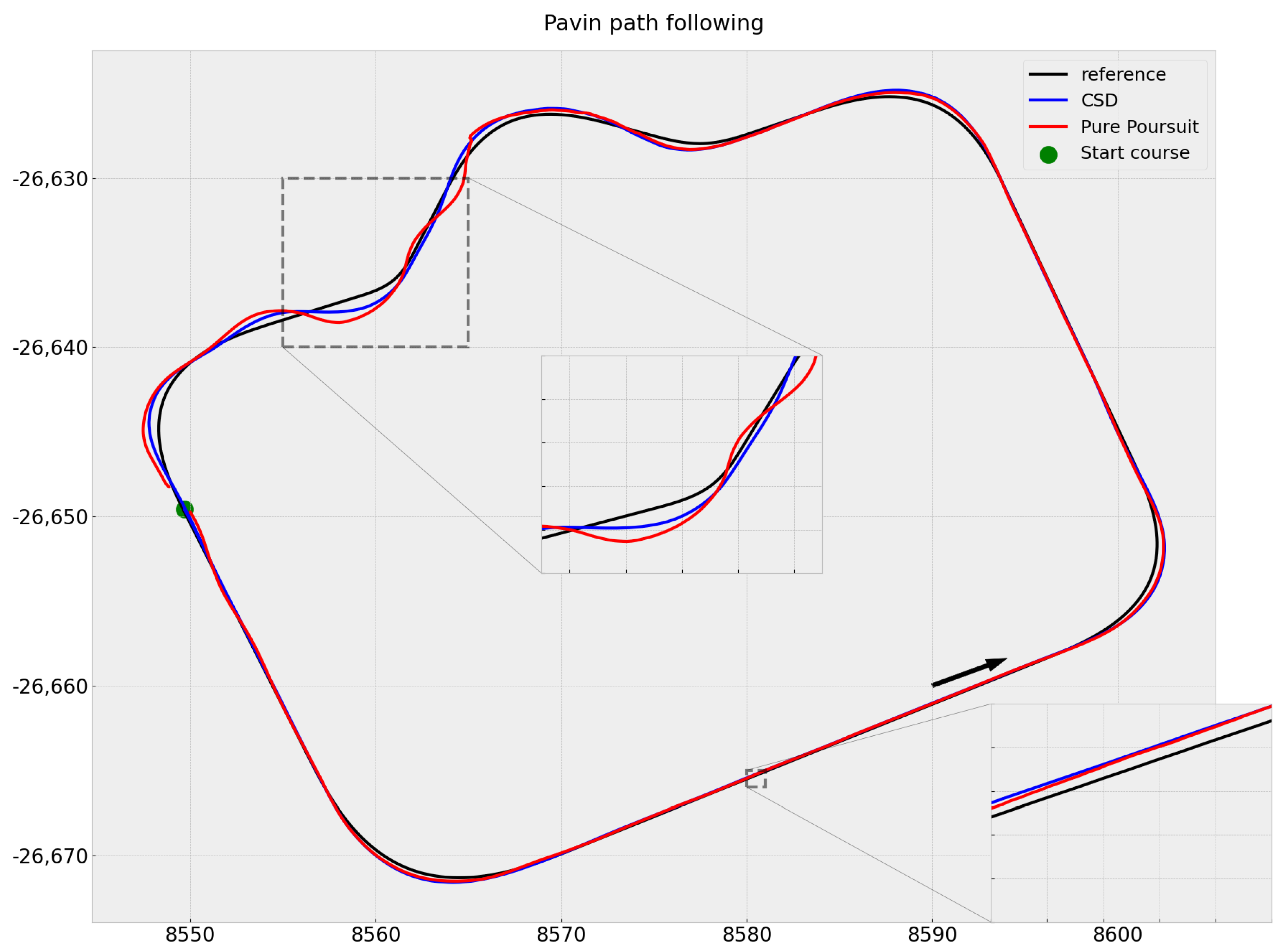
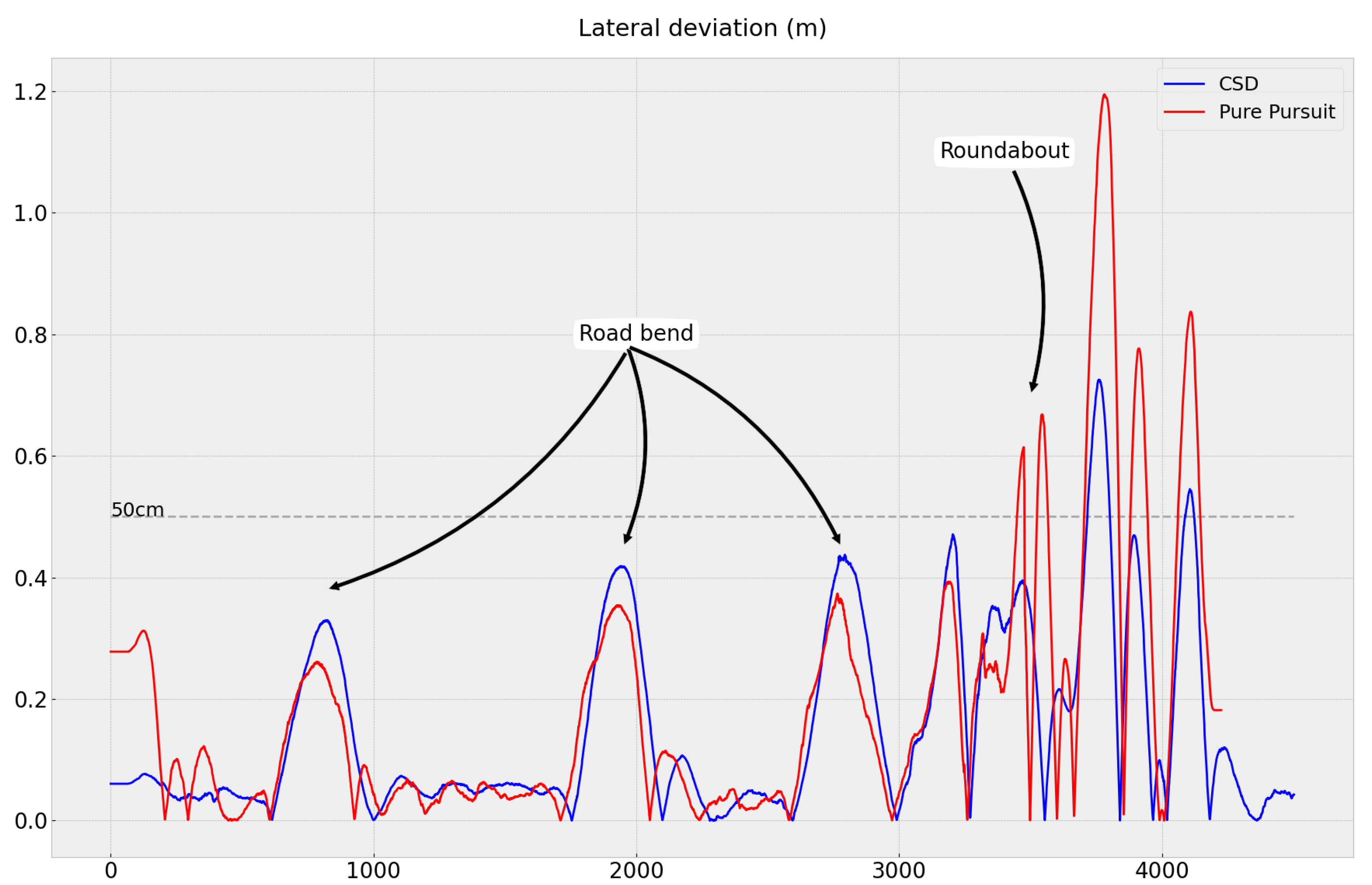
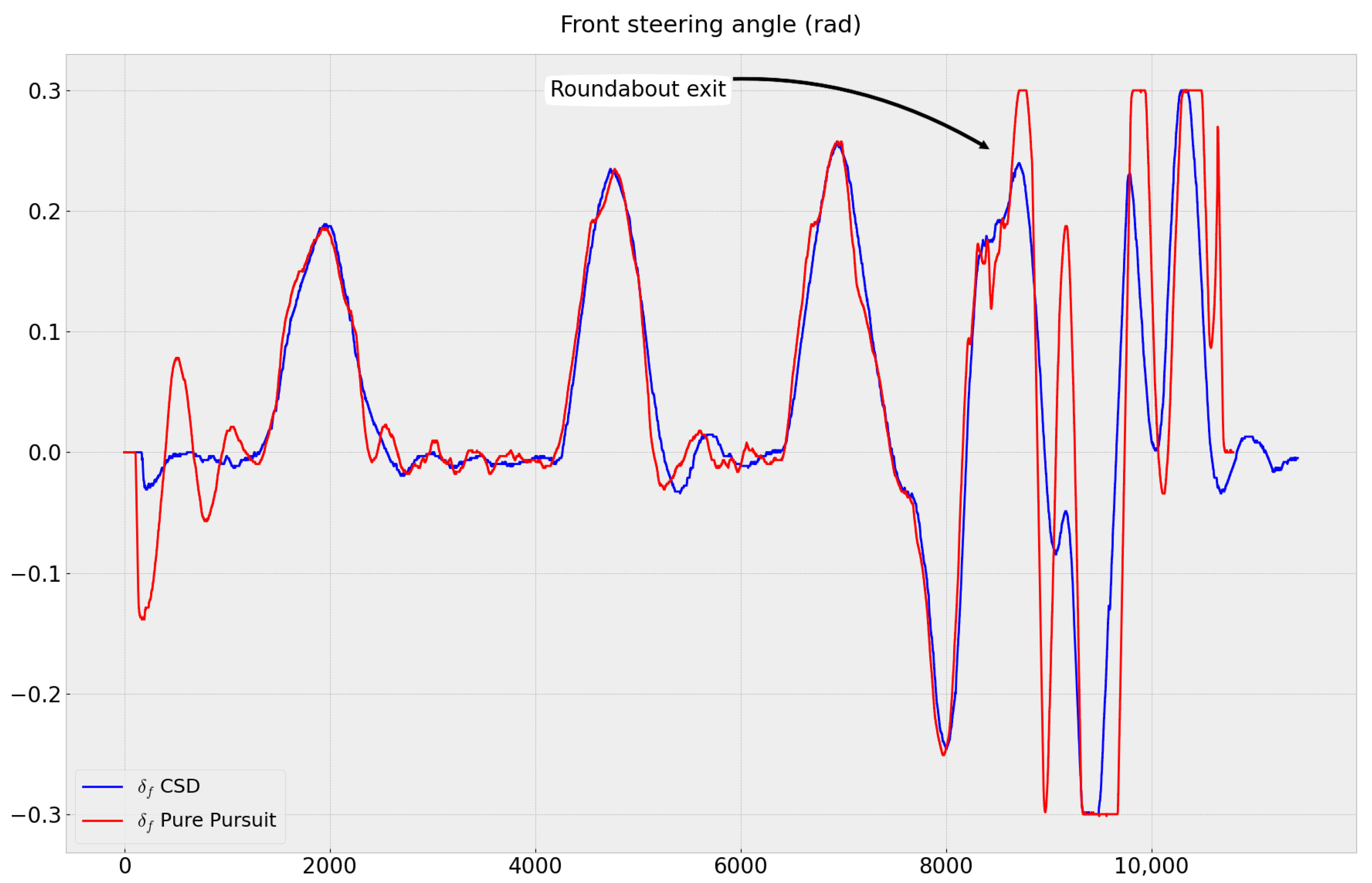
4.2. Path Following
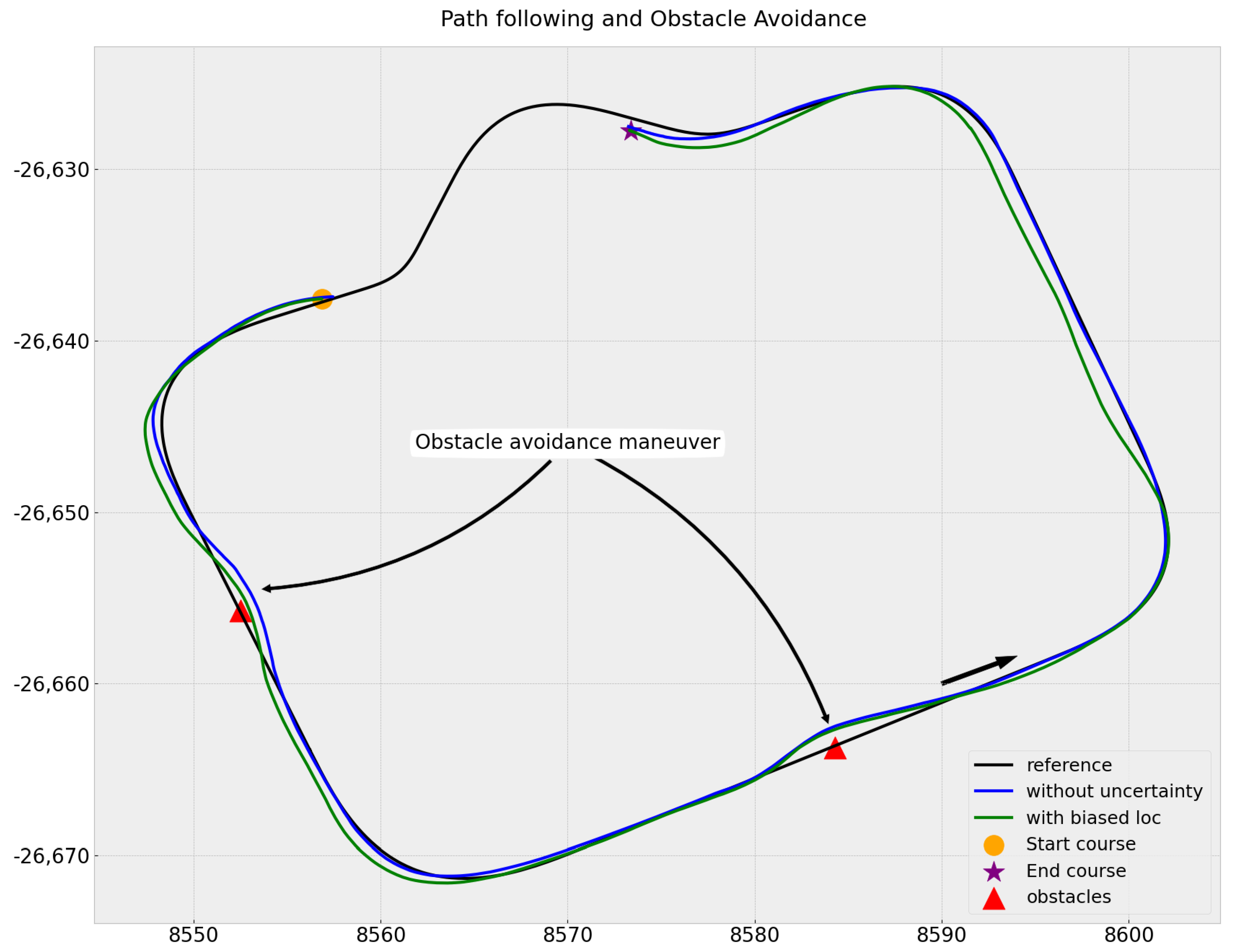
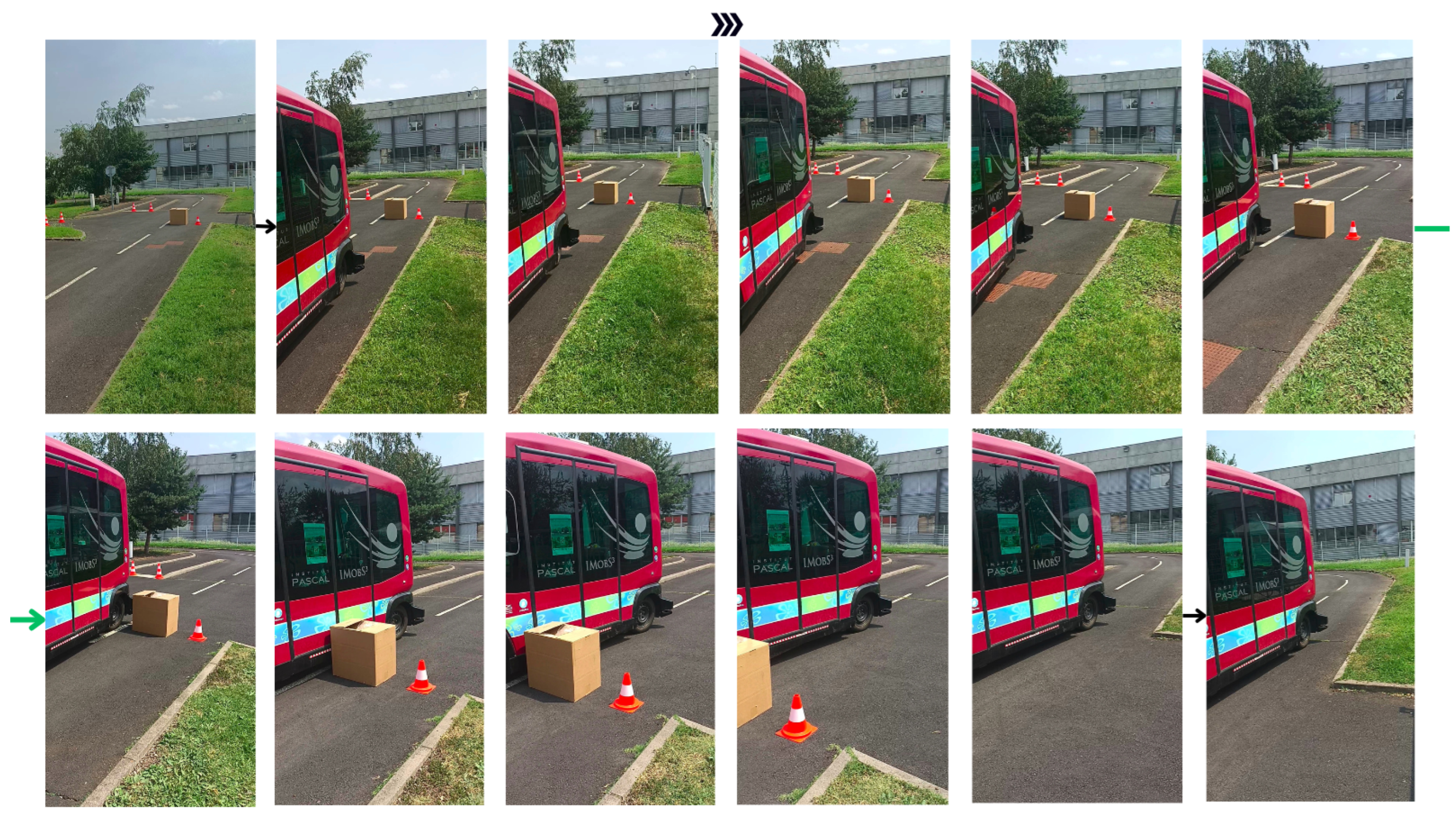
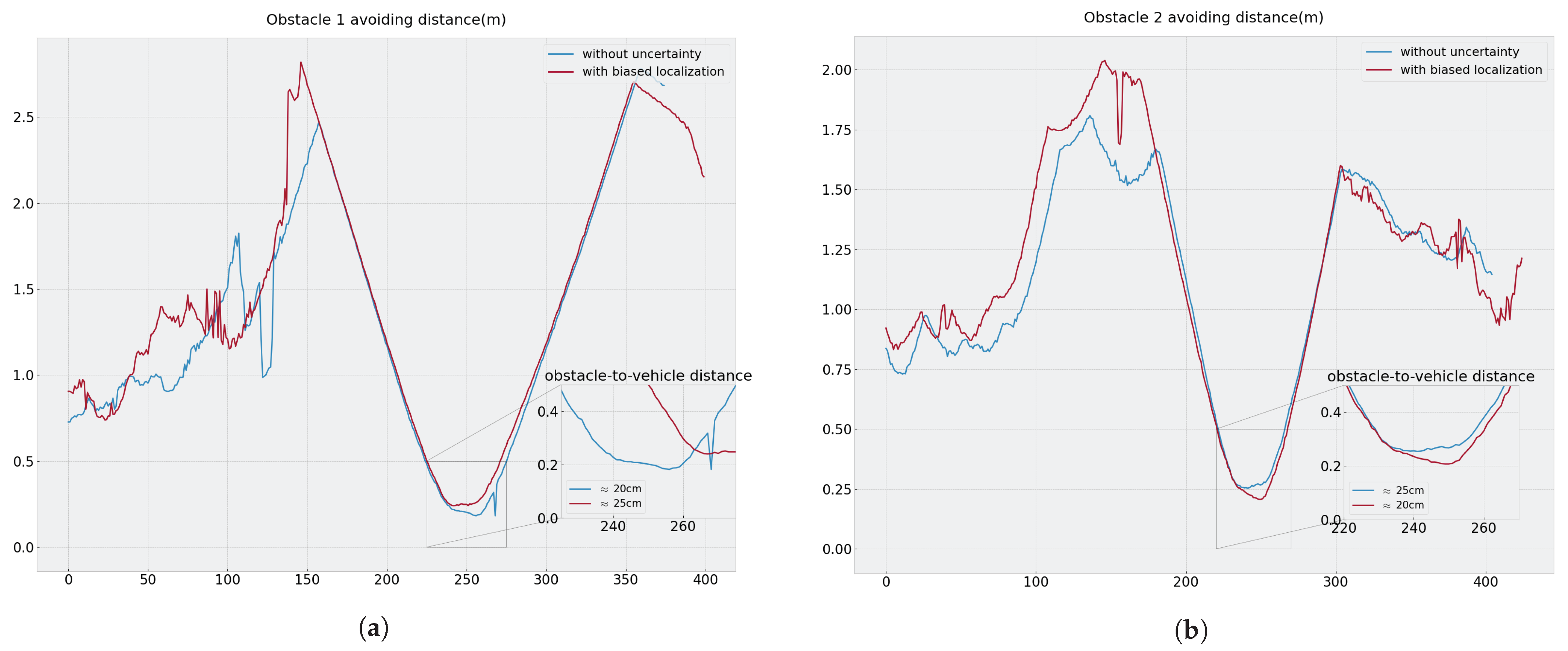
4.3. Path-Following and Obstacle Avoidance
5. Conclusions
- Additional tests modeling and injecting more realistic noise or localization errors, such as GPS signal loss, to observe robustness against uncertainty.
- Integration of a prior map into the local map, for example, to take into account road boundaries, which were not detectable by the planar lidars used in this study.
- Translating path-following into a risk map that can be associated with the occupancy grid in order to define more unifiable criteria.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CSD | Command Space Discretization (our approach) |
| EZ10 | EasyMile 10 |
| PAVIN | Plateforme Auvergnate pour les Véhicules INtelligents |
| Auvergne (French region) Platform for INtelligent Vehicles | |
| DWA | Dynamic Windows Approach |
| UKF | Unscented Kalman Filters |
| CIF | Covariance Intersection Filter |
| GPS | Global Positioning System |
| GNSS | Global Navigation Satellite Systems |
| ROS | Robot Operating System |
| DARPA | Defense Advanced Research Projects Agency |
References
- Kunchev, V.; Jain, L.; Ivancevic, V.; Finn, A. Path planning and obstacle avoidance for autonomous mobile robots: A review. In Proceedings of the Knowledge-Based Intelligent Information and Engineering Systems: 10th International Conference, KES 2006, Bournemouth, UK, 9–11 October 2006; Proceedings, Part II 10. Springer: Berlin/Heidelberg, Germany, 2006; pp. 537–544. [Google Scholar]
- Rashid, A.T.; Ali, A.A.; Frasca, M.; Fortuna, L. Path planning with obstacle avoidance based on visibility binary tree algorithm. Robot. Auton. Syst. 2013, 61, 1440–1449. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Le, H.X. Path planning and obstacle avoidance approaches for mobile robot. arXiv 2016, arXiv:1609.01935. [Google Scholar]
- Almasri, M.M.; Alajlan, A.M.; Elleithy, K.M. Trajectory planning and collision avoidance algorithm for mobile robotics system. IEEE Sens. J. 2016, 16, 5021–5028. [Google Scholar] [CrossRef]
- Rafai, A.N.A.; Adzhar, N.; Jaini, N.I. A review on path planning and obstacle avoidance algorithms for autonomous mobile robots. J. Robot. 2022, 2022, 2538220. [Google Scholar] [CrossRef]
- Srivastava, A. Sense-Plan-Act in Robotic Applications. Available online: https://www.researchgate.net/profile/Ankit-Srivastava-46/publication/349248621_Sense-Plan-Act_in_Robotic_Applications/links/60268a00a6fdcc37a81e454c/Sense-Plan-Act-in-Robotic-Applications.pdf (accessed on 15 August 2023).
- Cox, I.J. Blanche-an experiment in guidance and navigation of an autonomous robot vehicle. IEEE Trans. Robot. Autom. 1991, 7, 193–204. [Google Scholar] [CrossRef]
- Thrun, S.; Fox, D.; Burgard, W.; Dellaert, F. Robust Monte Carlo localization for mobile robots. Artif. Intell. 2001, 128, 99–141. [Google Scholar] [CrossRef]
- Urrea, C.; Agramonte, R. Kalman filter: Historical overview and review of its use in robotics 60 years after its creation. J. Sens. 2021, 2021, 9674015. [Google Scholar] [CrossRef]
- Julier, S.; Ulhmann, J. Unscented filtering and Nonlinear Estimation. IEEE Rev. 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.K. General decentralized data fusion with covariance intersection. In Handbook of Multisensor Data Fusion: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2009; pp. 319–344. [Google Scholar]
- Crisan, D.; Doucet, A. Survey of convergence results on particle filtering methods for practitioners. IEEE Trans. Signal Process. 2002, 50, 736–746. [Google Scholar] [CrossRef]
- Patle, B.K.; Babu L, G.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Coulter, R.C. Implementation of the Pure Pursuit Path Tracking Algorithm; Technical report; Carnegie-Mellon UNIV Pittsburgh PA Robotics INST: Pittsburgh, PA, USA, 1992. [Google Scholar]
- Micaelli, A.; Samson, C. Trajectory Tracking for Unicycle-Type and Two-Steering-Wheels Mobile Robots. Ph.D. Thesis, INRIA, Le Chesnay-Rocquencourt, France, 1993. [Google Scholar]
- Saval-Calvo, M.; Medina-Valdés, L.; Castillo-Secilla, J.M.; Cuenca-Asensi, S.; Martínez-Álvarez, A.; Villagrá, J. A review of the bayesian occupancy filter. Sensors 2017, 17, 344. [Google Scholar] [CrossRef] [PubMed]
- Souza, A.; Gonçalves, L.M. Occupancy-elevation grid: An alternative approach for robotic mapping and navigation. Robotica 2016, 34, 2592–2609. [Google Scholar] [CrossRef]
- Laconte, J.; Debain, C.; Chapuis, R.; Pomerleau, F.; Aufrère, R. Lambda-field: A continuous counterpart of the bayesian occupancy grid for risk assessment. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: New York, NY, USA, 2019; pp. 167–172. [Google Scholar]
- Benrabah, M.; Orou Mousse, C.; Morceaux, J.; Aufrère, R.; Chapuis, R.; Randriamiarintsoa, E. Dual occupancy and knowledge maps management for optimal traversability risk analysis. In Proceedings of the 26th International Conference on Information Fusion, Charleston, SC, USA, 27–30 June 2023. [Google Scholar]
- Khatib, O. The potential field approach and operational space formulation in robot control. In Adaptive and Learning Systems: Theory and Applications; Springer: Berlin/Heidelberg, Germany, 1986; pp. 367–377. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]
- Von Hundelshausen, F.; Himmelsbach, M.; Hecker, F.; Mueller, A.; Wuensche, H.J. Driving with tentacles: Integral structures for sensing and motion. J. Field Robot. 2008, 25, 640–673. [Google Scholar] [CrossRef]
- Gao, H.; Ma, Z.; Zhao, Y. A fusion approach for mobile robot path planning based on improved a algorithm and adaptive dynamic window approach. In Proceedings of the 2021 IEEE 4th International Conference on Electronics Technology (ICET), Chengdu, China, 7–10 May 2021; IEEE: New York, NY, USA, 2021; pp. 882–886. [Google Scholar]
- Yang, C.H.; Xie, H.; Liu, Z.X.; Yang, P.; Zhao, N.; Yang, B.; Li, Z.B. Functional Morphology of the Antennae and Sensilla of Coeloides qinlingensis Dang et Yang (Hymenoptera: Braconidae). Insects 2022, 13, 907. [Google Scholar] [CrossRef] [PubMed]
- Nardi, L.; Stachniss, C. Towards Uncertainty-Aware Path Planning for Navigation on Road Networks Using Augmented MDPs. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Van Den Berg, J.; Patil, S.; Alterovitz, R. Motion planning under uncertainty using iterative local optimization in belief space. Int. J. Robot. Res. 2012, 31, 1263–1278. [Google Scholar] [CrossRef]
- Kurniawati, H. Partially observable markov decision processes (pomdps) and robotics. arXiv 2021, arXiv:2107.07599. [Google Scholar]
- Artunedo, A.; Villagra, J.; Godoy, J.; Del Castillo, M.D. Motion planning approach considering localization uncertainty. IEEE Trans. Veh. Technol. 2020, 69, 5983–5994. [Google Scholar] [CrossRef]
- Elfes, A. Using occupancy grids for mobile robot perception and navigation. Computer 1989, 22, 46–57. [Google Scholar] [CrossRef]
- Royer, E.; Marmoiton, F.; Alizon, S.; Ramadasan, D.; Slade, M.; Nizard, A.; Dhome, M.; Thuilot, B.; Bonjean, F. Lessons learned after more than 1000 km in an autonomous shuttle guided by vision. In Proceedings of the 2016 IEEE 19Th International Conference on Intelligent Transportation Systems (ITSC), Janeiro, Brazil, 1–4 November 2016; IEEE: New York, NY, USA, 2016; pp. 2248–2253. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.P.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Ballardini, A.L.; Fontana, S.; Furlan, A.; Sorrenti, D.G. ira_laser_tools: A ROS laserscan manipulation toolbox. arXiv 2014, arXiv:1411.1086. [Google Scholar]
- Buehler, M.; Iagnemma, K.; Singh, S. The 2005 DARPA Grand Challenge: The Great Robot Race; Springer: Berlin/Heidelberg, Germany, 2007; Volume 36. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Values |
|---|---|
| Dimensions (L × W × H) | 4.050 × 1.892 × 2.871 (m) |
| Wheelbase (L) | 2.80 m |
| Maximum steering | 0.3 rad |
| Maximum steering speed | 0.2 rad/s |
| Maximum speed | 11 m/s (40 km/h) |
| Maximum acceleration | 0.5 m/s² |
| Minimum control frequency | 10 Hz |
| No-load mass | 1700 kg |
| Maximum mass | 2800 kg |
| Approaches | Mean | Std | ≤50 cm |
|---|---|---|---|
| Pure Poursuit | 0.19 cm | 0.21 cm | 91.65% |
| CSD | 0.15 cm | 0.15 cm | 97.34% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orou Mousse, C.; Benrabah, M.; Marmoiton, F.; Wilhelm, A.; Chapuis, R. A Framework for Optimal Navigation in Situations of Localization Uncertainty. Sensors 2023, 23, 7237. https://doi.org/10.3390/s23167237
Orou Mousse C, Benrabah M, Marmoiton F, Wilhelm A, Chapuis R. A Framework for Optimal Navigation in Situations of Localization Uncertainty. Sensors. 2023; 23(16):7237. https://doi.org/10.3390/s23167237
Chicago/Turabian StyleOrou Mousse, Charifou, Mohamed Benrabah, François Marmoiton, Alexis Wilhelm, and Roland Chapuis. 2023. "A Framework for Optimal Navigation in Situations of Localization Uncertainty" Sensors 23, no. 16: 7237. https://doi.org/10.3390/s23167237
APA StyleOrou Mousse, C., Benrabah, M., Marmoiton, F., Wilhelm, A., & Chapuis, R. (2023). A Framework for Optimal Navigation in Situations of Localization Uncertainty. Sensors, 23(16), 7237. https://doi.org/10.3390/s23167237