
Sensing and Control Strategies for a Synergy-Based, Cable-Driven Exosuit via a Modular Test Bench
 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design Criteria and Concepts
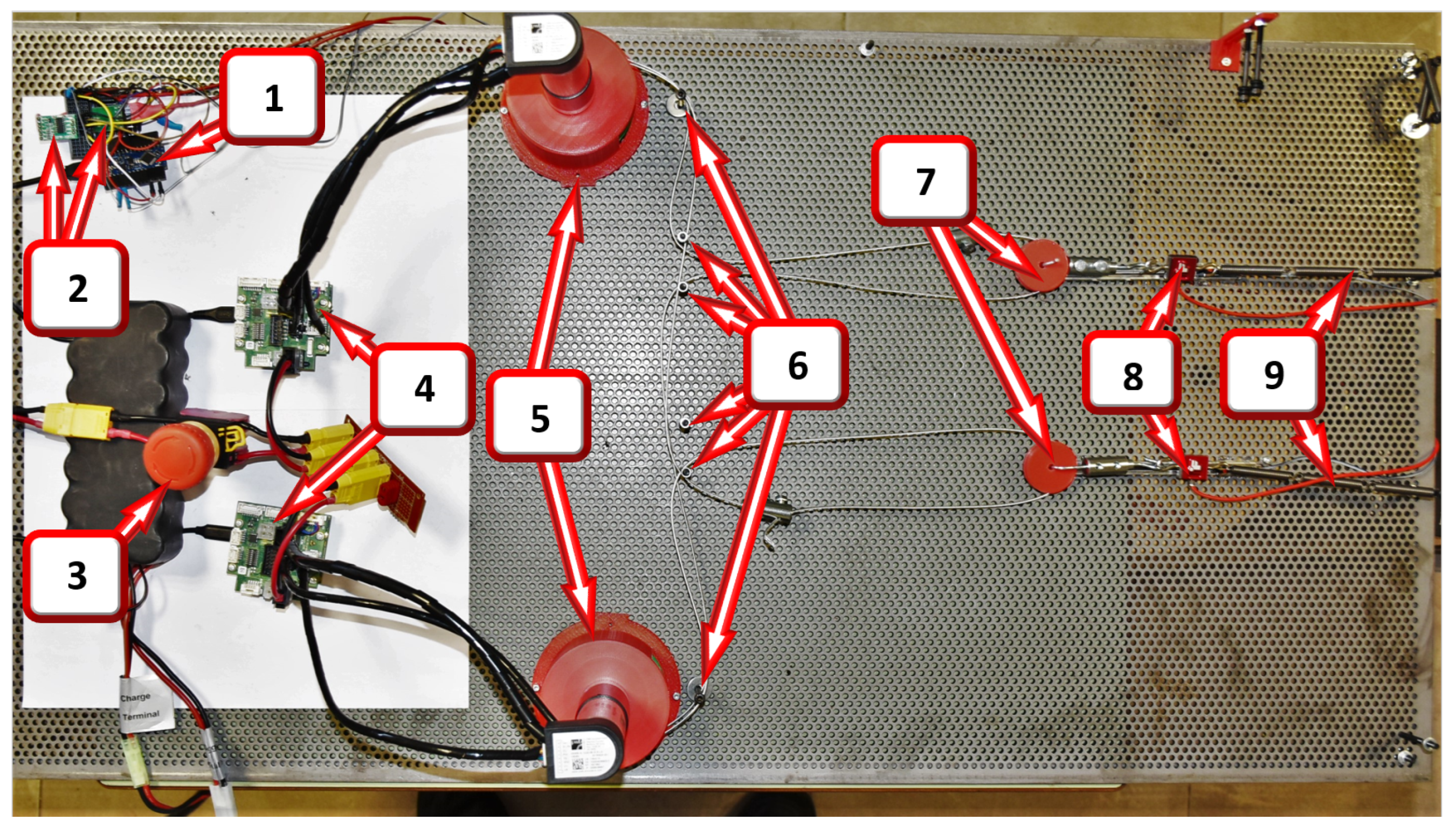
2.2. Construction of the Test Bench and Its Modules
3. Applications and Tests Conducted
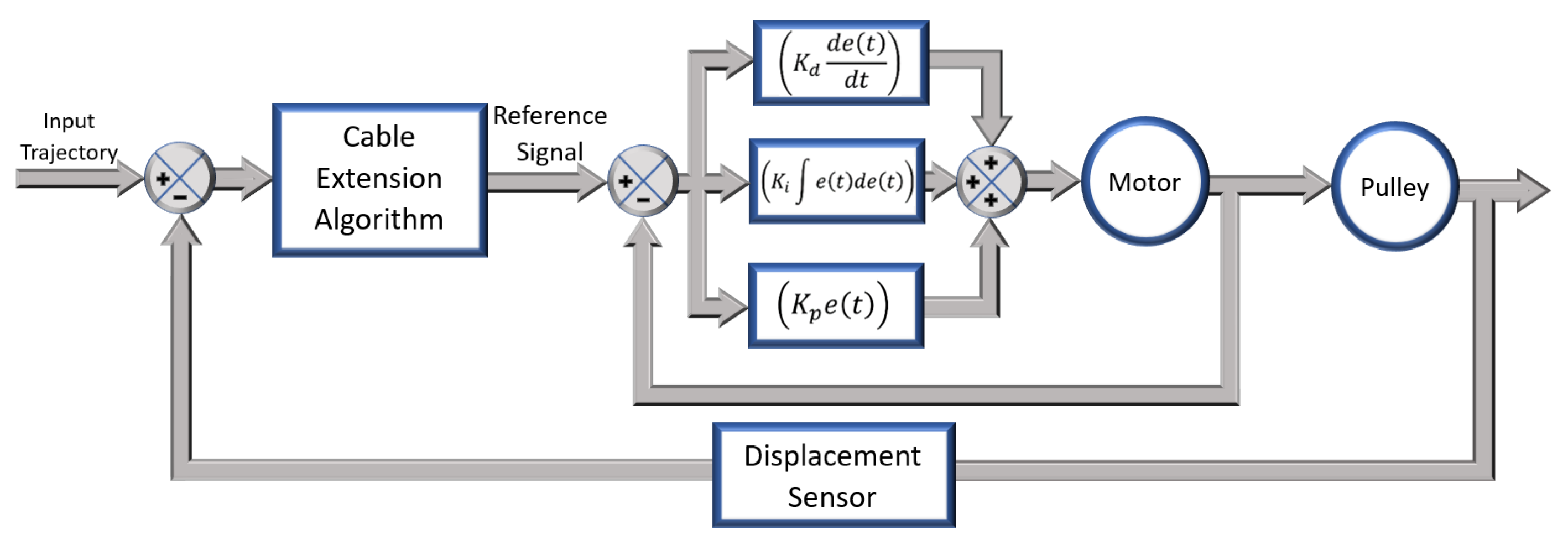
3.1. Tuning the Motor Position Controller
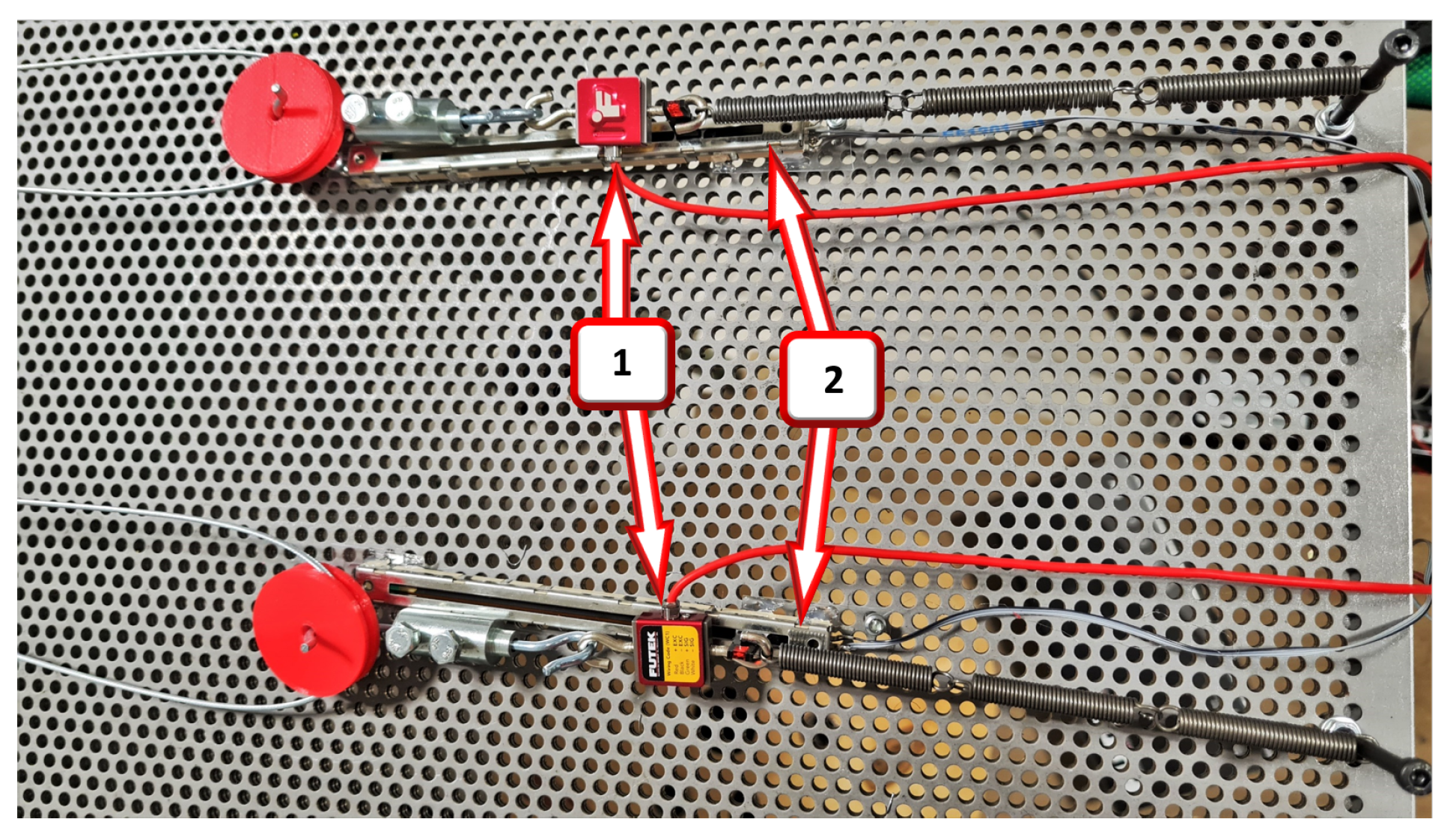
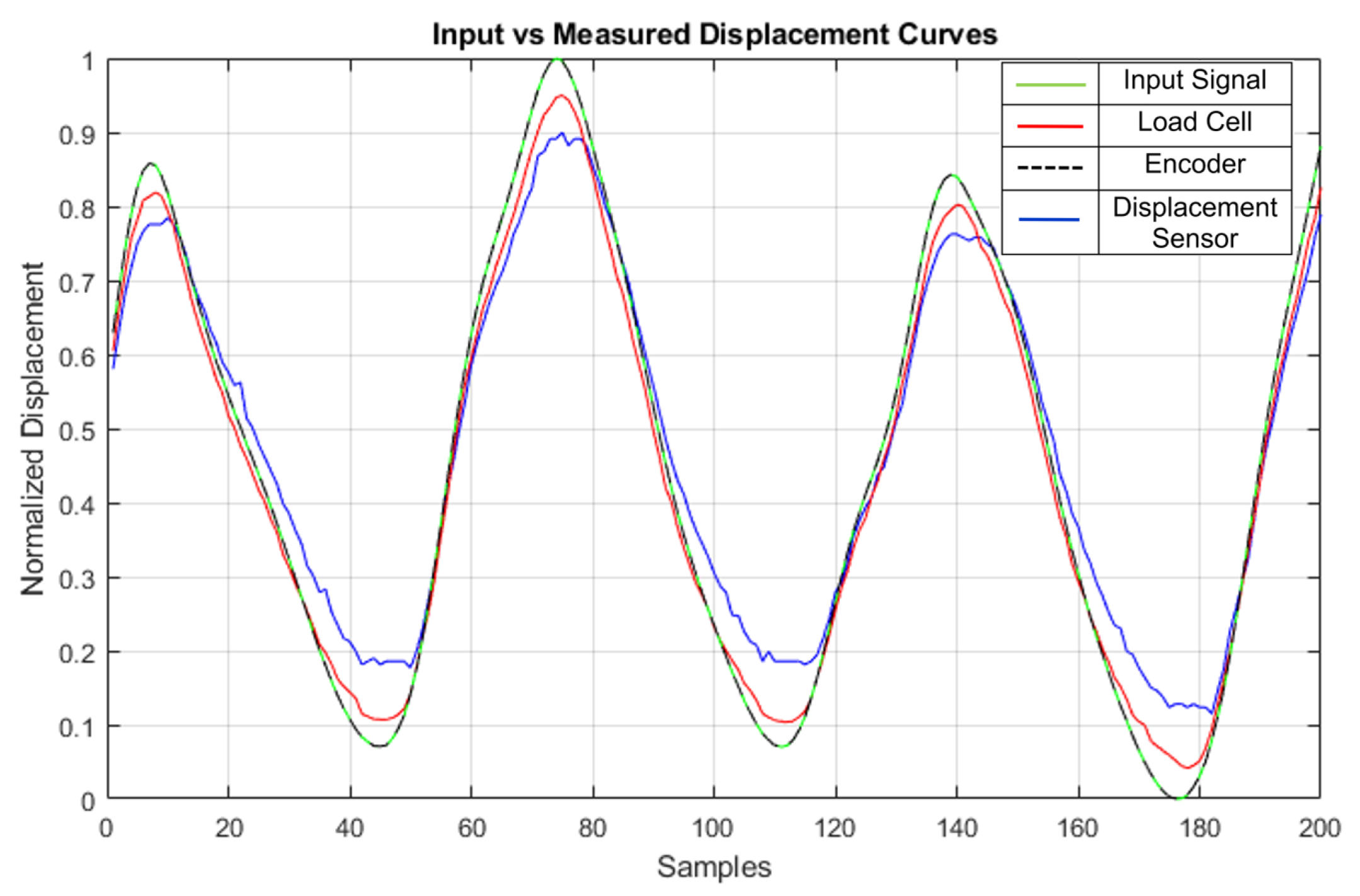
3.2. Multi-Sensor Validation
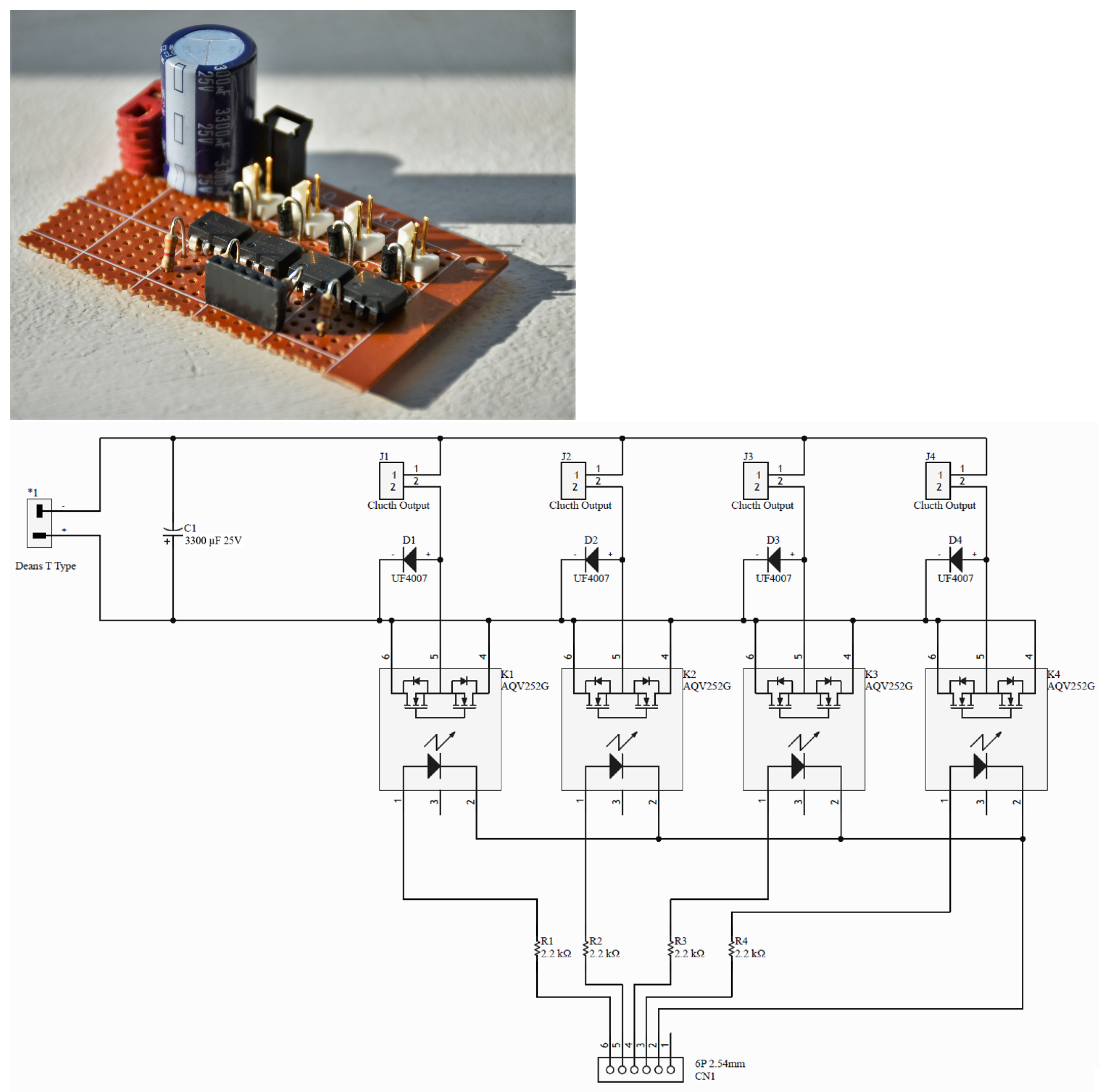
3.3. Optimizing Clutch Performance
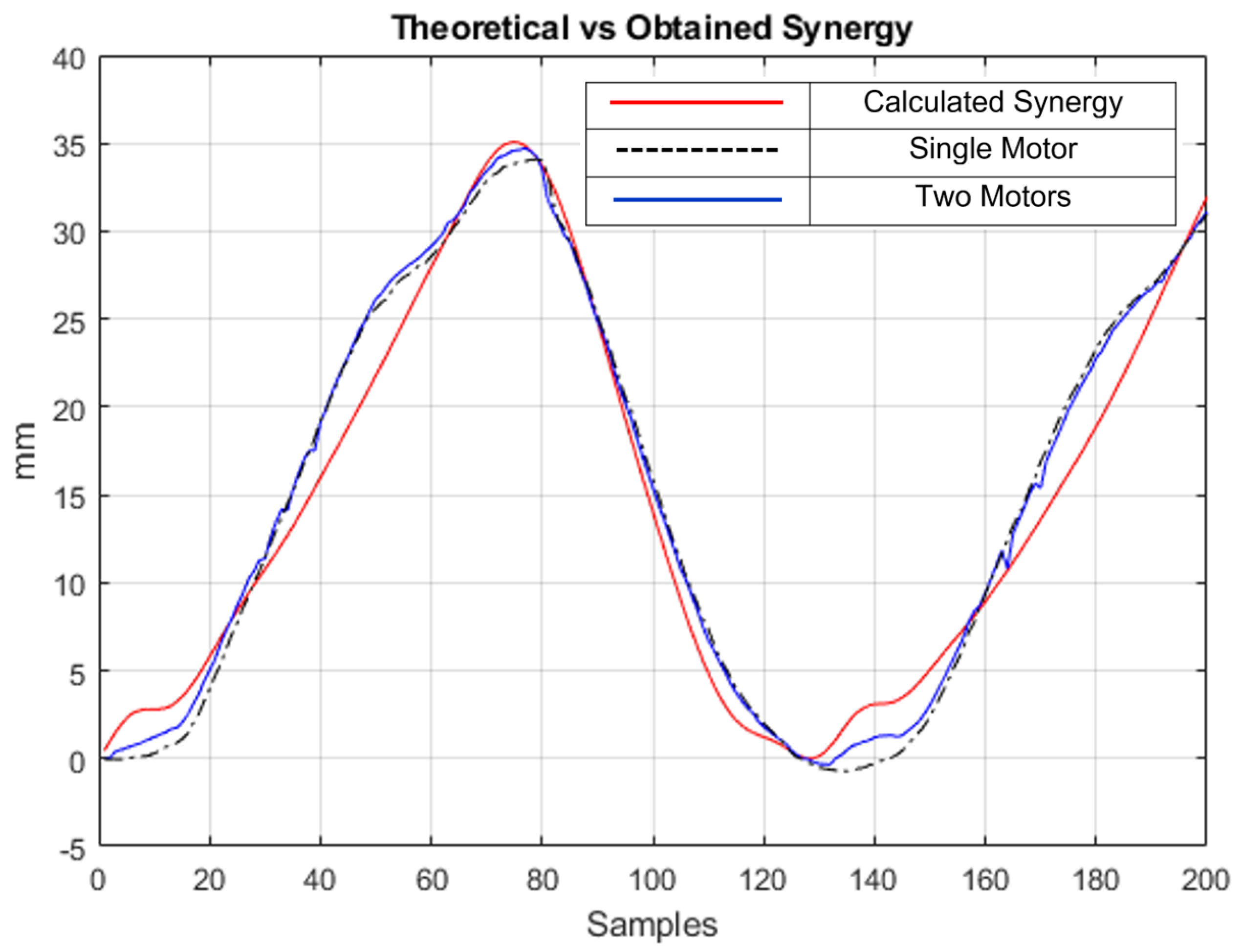
3.4. Testing Synergy-Based Actuation Methods
4. Results
4.1. Tuning the Motor Position Controller
4.2. Multi-Sensor Validation for Cable Displacement Algorithms
4.3. Optimizing Clutch Performance
4.4. Testing Synergy-Based Actuation Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. World Population Ageing 2019; World Health Organization: Geneva, Switzerland, 2019; p. 64. [Google Scholar]
- Sutandi, A.C.; Rahman, S.F. Robotic Exosuit to improve walking and gait rehabilitation for stroke survivors: A review. In Proceedings of the AIP Conference Proceedings, Pandharpur, India, 25–26 June 2021; Volume 2344, p. 050014. [Google Scholar]
- Awad, L.N.; Kudzia, P.; Revi, D.A.; Ellis, T.D.; Walsh, C.J. Walking faster and farther with a soft robotic exosuit: Implications for post-stroke gait assistance and rehabilitation. IEEE Open J. Eng. Med. Biol. 2020, 1, 108–115. [Google Scholar] [CrossRef] [PubMed]
- Koch, M.A.; Font-Llagunes, J.M. Lower-Limb Exosuits for Rehabilitation or Assistance of Human Movement: A Systematic Review. Appl. Sci. 2021, 11, 8743. [Google Scholar] [CrossRef]
- Awad, L.N.; Bae, J.; O’donnell, K.; De Rossi, S.M.; Hendron, K.; Sloot, L.H.; Kudzia, P.; Allen, S.; Holt, K.G.; Ellis, T.D.; et al. A soft robotic exosuit improves walking in patients after stroke. Sci. Transl. Med. 2017, 9, eaai9084. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Asbeck, A.T.; Dyer, R.J.; Larusson, A.F.; Walsh, C.J. Biologically-inspired soft exosuit. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Seattle, WA, USA, 24–26 June 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Asbeck, A.T.; De Rossi, S.M.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Ding, Y.; Galiana, I.; Siviy, C.; Panizzolo, F.A.; Walsh, C. IMU-based iterative control for hip extension assistance with a soft exosuit. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 3501–3508. [Google Scholar] [CrossRef]
- Dinh, B.K.; Xiloyannis, M.; Cappello, L.; Antuvan, C.W.; Yen, S.C.; Masia, L. Adaptive backlash compensation in upper limb soft wearable exoskeletons. Robot. Auton. Syst. 2017, 92, 173–186. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Cappello, L.; Khanh, D.B.; Yen, S.C.; Masia, L. Modelling and design of a synergy-based actuator for a tendon-driven soft robotic glove. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Singapore, 26–29 June 2016; pp. 1213–1219. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Annese, E.; Canesi, M.; Kodiyan, A.; Bicchi, A.; Micera, S.; Ajoudani, A.; Masia, L. Design and validation of a modular one-to-many actuator for a soft wearable exosuit. Front. Neurorobot. 2019, 13, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Cappello, L.; Binh, D.K.; Yen, S.C.; Masia, L. Design and preliminary characterization of a soft wearable exoskeleton for upper limb. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Singapore, 26–29 June 2016; pp. 623–630. [Google Scholar] [CrossRef]
- Xu, K.; Liu, H.; Du, Y.; Zhu, X. Design of an underactuated anthropomorphic hand with mechanically implemented postural synergies. Adv. Robot. 2014, 28, 1459–1474. [Google Scholar] [CrossRef]
- Copaci, D.; Martin, F.; Moreno, L.; Blanco, D. SMA Based Elbow Exoskeleton for Rehabilitation Therapy and Patient Evaluation. IEEE Access 2019, 7, 31473–31484. [Google Scholar] [CrossRef]
- Schiele, A.; Letier, P.; van der Linde, R.; van der Helm, F. Bowden Cable. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3599–3604. [Google Scholar]
- Hartmann, V.N.; Rinaldi, D.d.M.; Taira, C.; Forner-Cordero, A. Industrial upper-limb exoskeleton characterization: Paving the way to new standards for benchmarking. Machines 2021, 9, 362. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Allen, S.J.; Phee, S.J. Direct torque control for cable conduit mechanisms for the robotic foot for footwear testing. Mechatronics 2018, 51, 137–149. [Google Scholar] [CrossRef] [Green Version]
- Wehner, M.; Quinlivan, B.; Aubin, P.M.; Martinez-Villalpando, E.; Baumann, M.; Stirling, L.; Holt, K.; Wood, R.; Walsh, C. A lightweight soft exosuit for gait assistance. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3362–3369. [Google Scholar] [CrossRef]
- Bartenbach, V.; Schmidt, K.; Naef, M.; Wyss, D.; Riener, R. Concept of a soft exosuit for the support of leg function in rehabilitation. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Singapore, 11–14 August 2015; pp. 125–130. [Google Scholar] [CrossRef]
- Rodríguez Jorge, D.; Bermejo García, J.; Jayakumar, A.; Lorente Moreno, R.; Agujetas Ortiz, R.; Romero Sánchez, F. Force and Torque Characterization in the Actuation of a Walking-Assistance, Cable-Driven Exosuit. Sensors 2022, 22, 4309. [Google Scholar] [CrossRef] [PubMed]
- Gomez-Vargas, D.; Ballen-Moreno, F.; Rodriguez-Guerrero, C.; Munera, M.; Cifuentes, C.A. Experimental characterization of the T-FLEX ankle exoskeleton for gait assistance. Mechatronics 2021, 78, 102608. [Google Scholar] [CrossRef]
- Fukuchi, C.A.; Fukuchi, R.K.; Duarte, M. A public dataset of overground and treadmill walking kinematics and kinetics in healthy individuals. PeerJ 2018, 6, e4640. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 4th ed.; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Jorge, D.R.; Bermejo-Garcìa, J.; Jayakumar, A.; Romero-Sánchez, F.; Alonso, F.J. A synergy-based approach for the design of a lower-limb, cable-driven exosuit. J. Mech. Des. 2022, 144, 103302. [Google Scholar] [CrossRef]
- Bermejo-García, J.; Rodríguez Jorge, D.; Romero-Sánchez, F.; Jayakumar, A.; Alonso-Sánchez, F.J. Actuation Strategies for a Wearable Cable-Driven Exosuit Based on Synergies in Younger and Older Adults. Sensors 2022, 23, 261. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Cianca, D.; Rodriguez-Guerrero, C.; Verstraten, T.; Jimenez-Fabian, R.; Vanderborght, B.; Lefeber, D. A Flexible shaft-driven Remote and Torsionally Compliant Actuator (RTCA) for wearable robots. Mechatronics 2019, 59, 178–188. [Google Scholar] [CrossRef]
- De Sousa, A.C.C.; Freire, J.P.C.; Bo, A.P. Integrating hip exosuit and FES for lower limb rehabilitation in a simulation environment. IFAC-PapersOnLine 2019, 51, 302–307. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Chiaradia, D.; Frisoli, A.; Masia, L. Physiological and kinematic effects of a soft exosuit on arm movements. J. Neuroeng. Rehabil. 2019, 16, 1–15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schmidt, K.; Duarte, J.E.; Grimmer, M.; Sancho-Puchades, A.; Wei, H.; Easthope, C.S.; Riener, R. The myosuit: Bi-articular anti-gravity exosuit that reduces hip extensor activity in sitting transfers. Front. Neurorobot. 2017, 11, 57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McCormack, A.S.; Godfrey, K.R. Rule-based autotuning based on frequency domain identification. IEEE Trans. Control Syst. Technol. 1998, 6, 43–61. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jayakumar, A.; Rodríguez Jorge, D.; Bermejo-García, J.; Agujetas, R.; Romero-Sánchez, F. Sensing and Control Strategies for a Synergy-Based, Cable-Driven Exosuit via a Modular Test Bench. Sensors 2023, 23, 4713. https://doi.org/10.3390/s23104713
Jayakumar A, Rodríguez Jorge D, Bermejo-García J, Agujetas R, Romero-Sánchez F. Sensing and Control Strategies for a Synergy-Based, Cable-Driven Exosuit via a Modular Test Bench. Sensors. 2023; 23(10):4713. https://doi.org/10.3390/s23104713
Chicago/Turabian StyleJayakumar, Ashwin, Daniel Rodríguez Jorge, Javier Bermejo-García, Rafael Agujetas, and Francisco Romero-Sánchez. 2023. "Sensing and Control Strategies for a Synergy-Based, Cable-Driven Exosuit via a Modular Test Bench" Sensors 23, no. 10: 4713. https://doi.org/10.3390/s23104713