
Case-Study-Based Overview of Methods and Technical Solutions of Analog and Digital Transmission in Measurement and Control Ship Systems

Abstract
:1. Introduction
2. Tank Level Measurement System (Problems and Recommended Solutions)
- Immersing pressure transmitters in seawater ballast tanks is not the best way to mount the transmitter (non-contact radar transmitters are a good option).
- Signal conditioners/isolators should be used at positions where junction boxes are located.
- Smart transmitters such as Foundation Fieldbus smart pressure transmitters can be a good alternative for classical 4–20 mA pressure transmitters with additional diagnostic information improving the reliability of the measurement process.
3. Smart Instrumentation Technologies (Theoretical Background)
3.1. HART Protocol (Hybrid Analogue–Digital Measurement and Control)
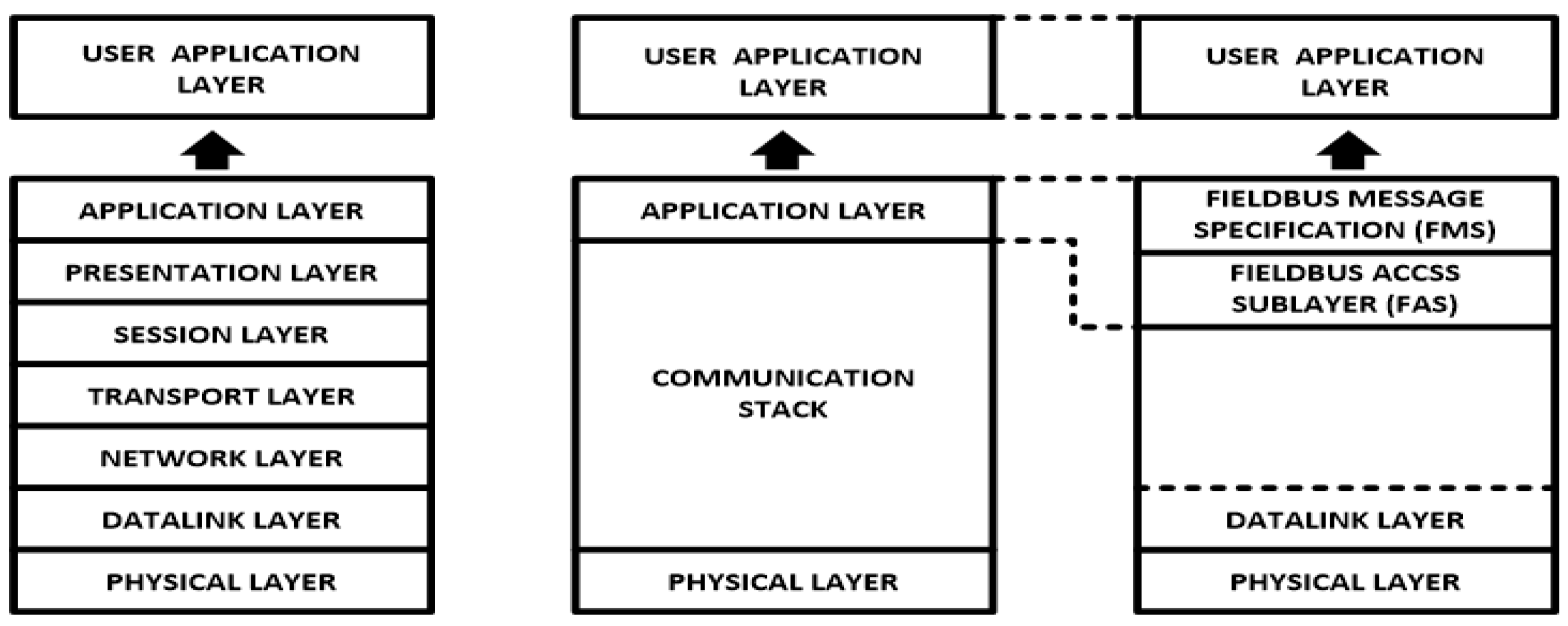
3.2. Foundation Fieldbus (Wired Digital Measurement and Control)
- Statistical calculation module: The measured pressure values are applied to high-pass filter to detect any slow changes, such as set point modifications, and eliminate them while constructing the input signal noise signature. The mean value is calculated for the unfiltered signal, and the standard deviation will be calculated over the filtered signal.
- Learning module: responsible for establishing the process baseline values based on mean and standard deviation values calculated by the previous module.
- Decision module: it compares the measured value with the baseline, to decide if an alert/alarm should be activated or such a measured value should be ignored.
3.3. Wireless HART (Wireless Digital Measurement and Control)
4. The 4–20 mA Analogue Standard (Integration and Performance Improvement)
5. Proposed Foundation Fieldbus (FF) Solution
- Non-intrinsically safe model.
- Intrinsically safe entity model.
- FNICO (Fieldbus Non-Incendive Concept) model.
- FISCO (Fieldbus Intrinsically Safe Concept) model.
- HPTC (High-Power Trunk Concept) model.
- DART (Dynamic Arc Recognition and Termination) model.
5.1. Non-Intrinsically Safe Model (Safe Area Application)
- Double bottom tanks’ sub-models: NON-IS-DB and NON-IS-DBSC.
- Top side tanks’ sub-models: NON-IS-TS and NON-IS-TSSC.
- Maximum capacity of power supply: 500 mA.
- for connection unit without short-circuit protection: 4 mA.
- for connection unit with short-circuit protection: (5 + 55) mA.
5.2. Intrinsically Safe Entity Model
- Double bottom tanks’ sub-model: IS-E-DB.
- Top side tanks’ sub-model: IS-E-TS.
- Maximum capacity of power supply: 80 mA.
- for connection unit without short-circuit protection: 0 mA.
5.3. FISCO (Fieldbus Intrinsically Safe Concept) Model
- Double bottom tanks’ sub-models: FISCO-IIB-DB, FISCO-IIC-DB and FISCO-IIB-DBSC.
- Top side tanks’ sub-models: FISCO-IIB-TS, FISCO-IIC-TS and FISCO-IIB-TSSC.
- Maximum capacity of IIB/IIC power supplies: 256 mA/120 mA.
- for connection unit without short-circuit protection: 0 mA.
- for connection unit with short-circuit protection: (5 + 55) mA.
5.4. FNICO (Fieldbus Non-Incendive Concept) Model
- Double bottom tanks’ sub-models: FNICO-IIB-DB, FNICO-IIC-DB, FNICO-IIB-DBSC and FNICO-IIC-DBSC.
- Top side tanks’ sub-models: FNICO-IIB-TS, FNICO-IIC-TS, FNICO-IIB-TSSC and FNICO-IIC-TSSC.
- Maximum capacity of IIB/IIC power supplies: 320 mA/180 mA.
- for connection unit without short-circuit protection: 0 mA.
- for connection unit with short-circuit protection: (5 + 55) mA.
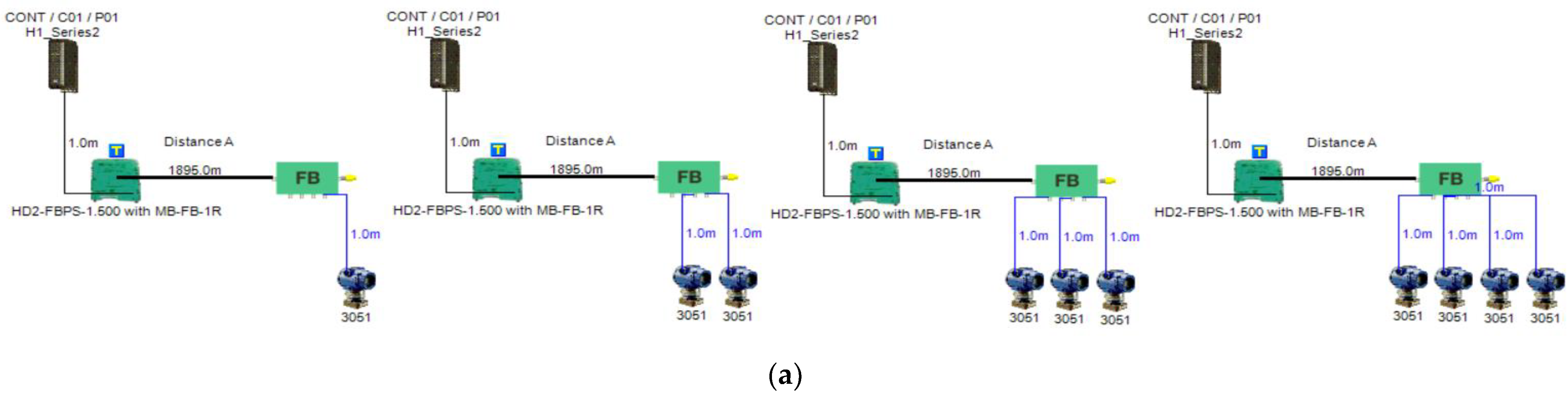
5.5. HPTC (High-Power Trunk Concept) Model
- The total current of field devices connected to the field barrier ().
- The H1 bus main trunk overall cable length ().
- Number of field barriers included in the segment () and current consumed by each of them ().
- Length of H1 bus main trunk cable sections between field barriers ().
- Double bottom tanks’ sub-models: HPTC-SP-DB and HPTC-FB-DB.
- Top side tanks’ sub-models: HPTC-SP-TS and HPTC-FB-TS.
- Maximum capacity of power supply: 500 mA.
- for segment protectors: (4 + 58) mA.
- Current consumed by field barriers is dependant of the previously mentioned variants, as explained in Equation (9).
5.6. DART (Dynamic Arc Recognition and Termination) Model
6. Results
7. Discussion
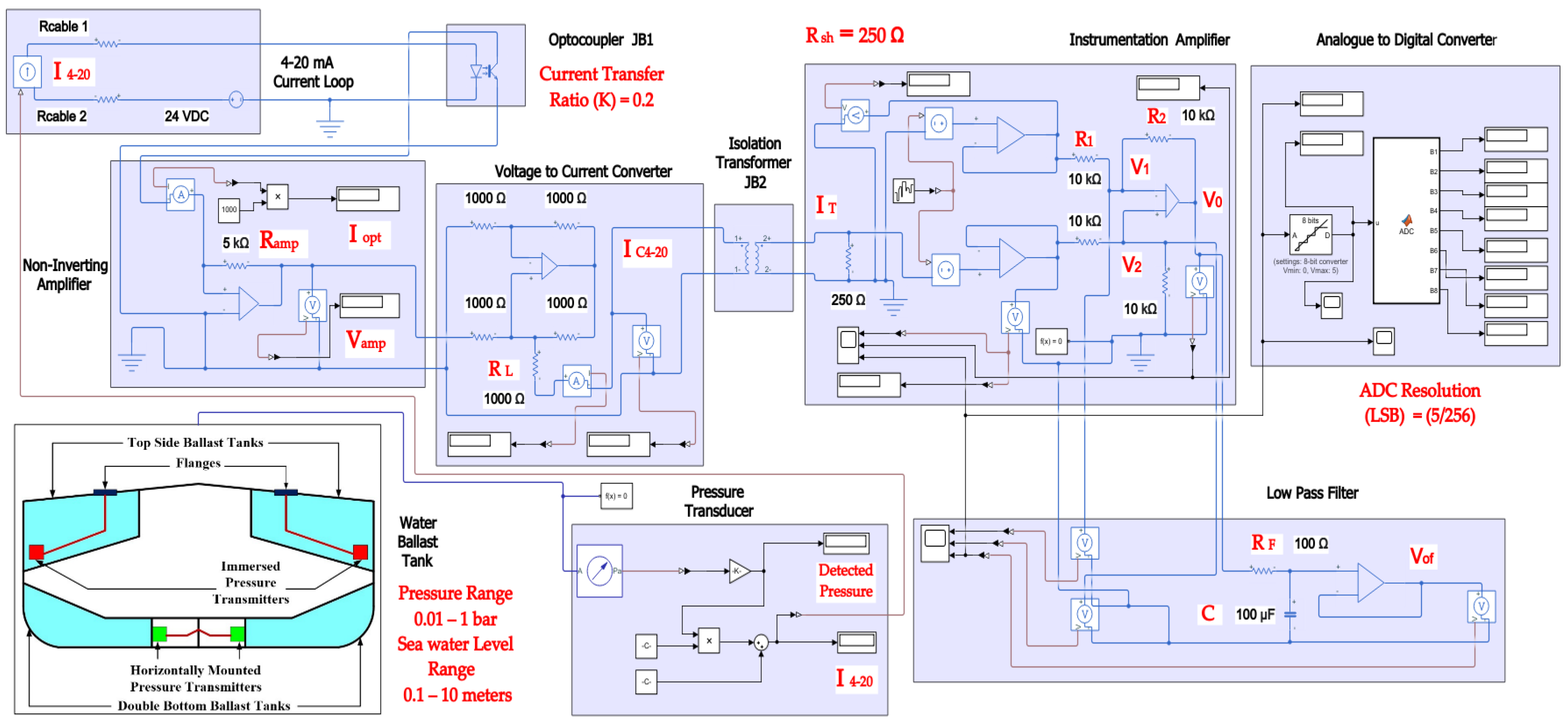
7.1. The 4–20 mA Pressure Measurement Current Loop on a Bulk Carrier Commercial Ship
7.2. Foundation Fieldbus Solution (Comparative Analysis)
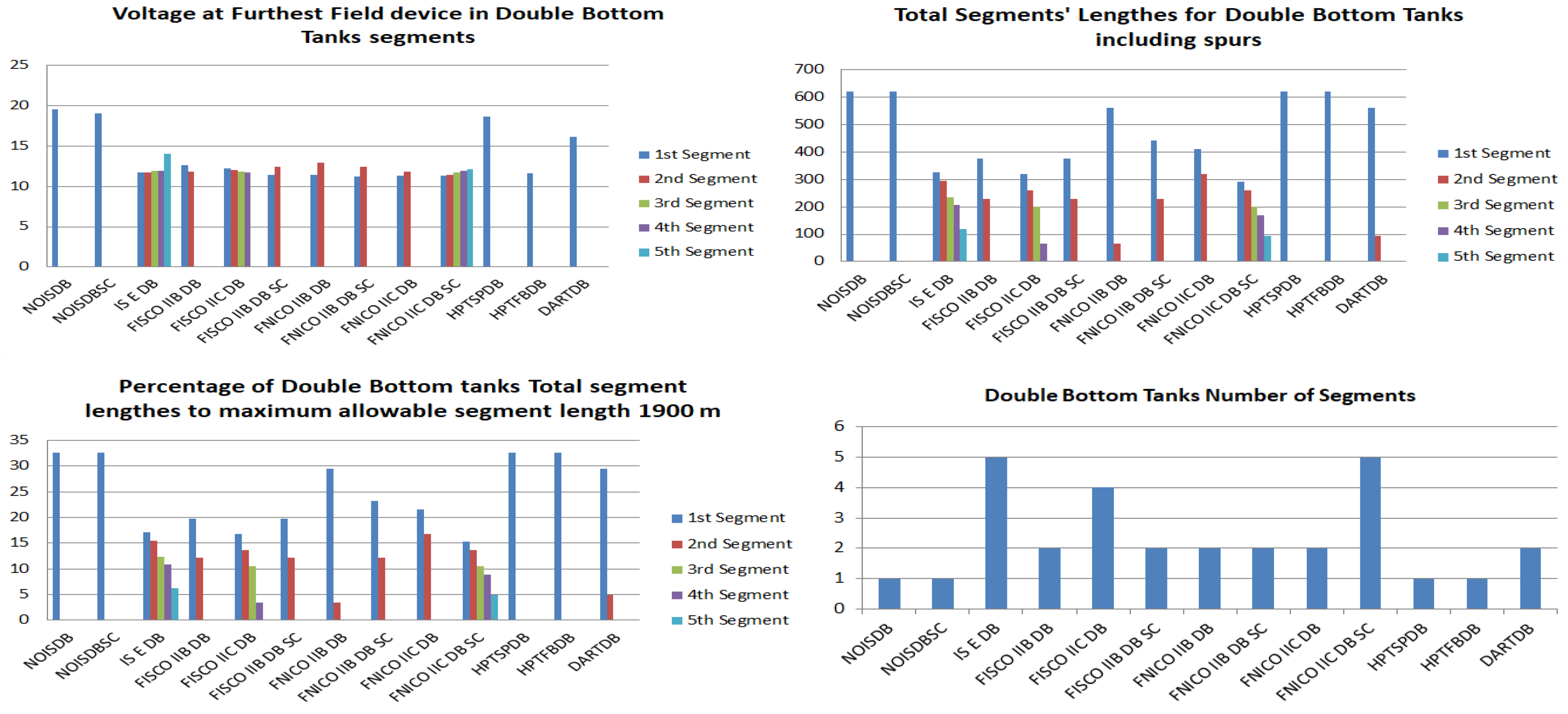
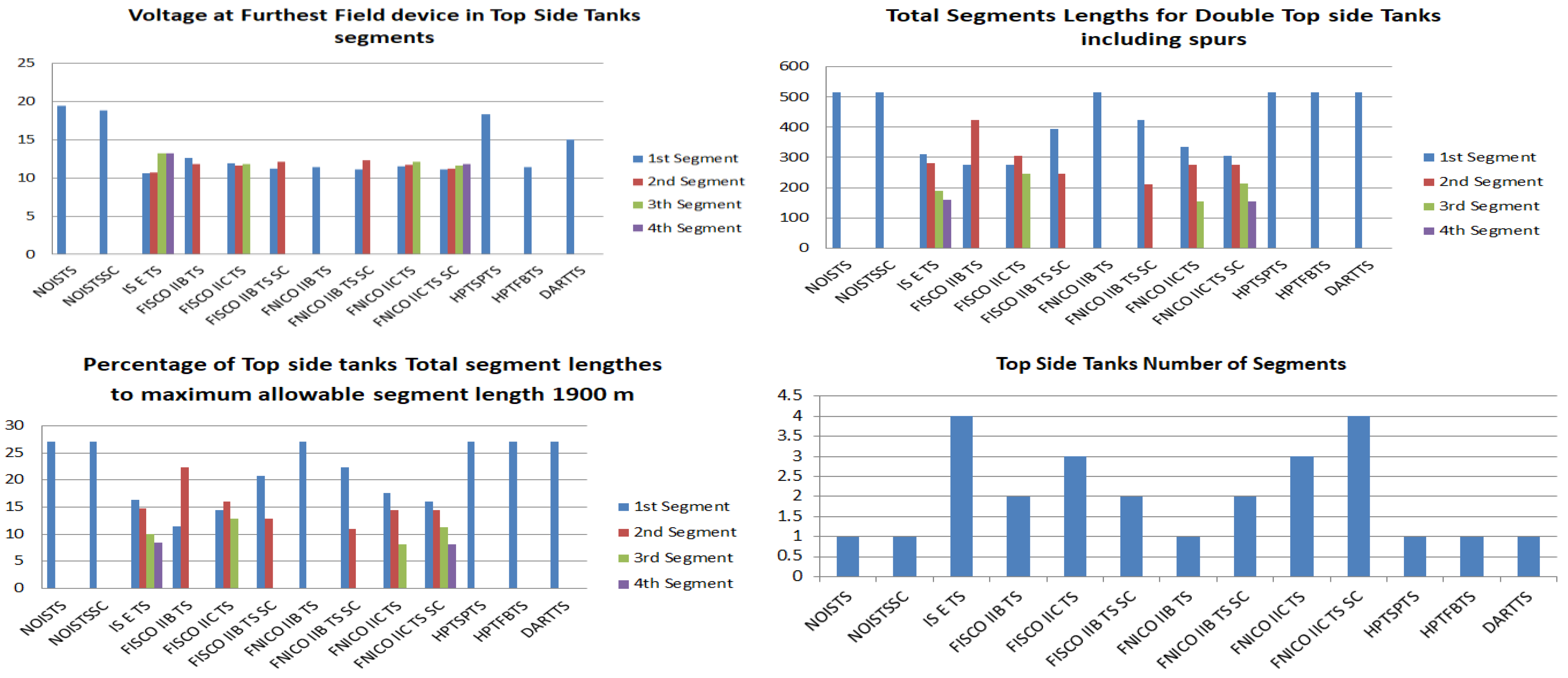
- Highest number of segments required to implement an FF model for DB and TS tanks was observed at entity model. Among FF proposed models, entity model allows for minimum available power to the trunk, a consequently minimum number of allowable field devices and a consequently higher number of segments for the same model.
- Applying short-circuit protection reduces the maximum number of allowable field devices per segment, as the power supply should be able to withstand the short-circuit current in case it takes place. Short-circuit current is calculated only once for the last connection unit at the field bus.
- Unlike all intrinsically safe FF models, the HPTC intrinsically safe model is the only model that allows for segment power supply units that are not particularly dedicated to HPTC, and that is why non-intrinsically safe models are almost identical to HPTC models except for the difference that segment protectors or field barriers are used in HPTC models as connection units for field devices, while simple connection megablocks are used in non-intrinsically safe models.
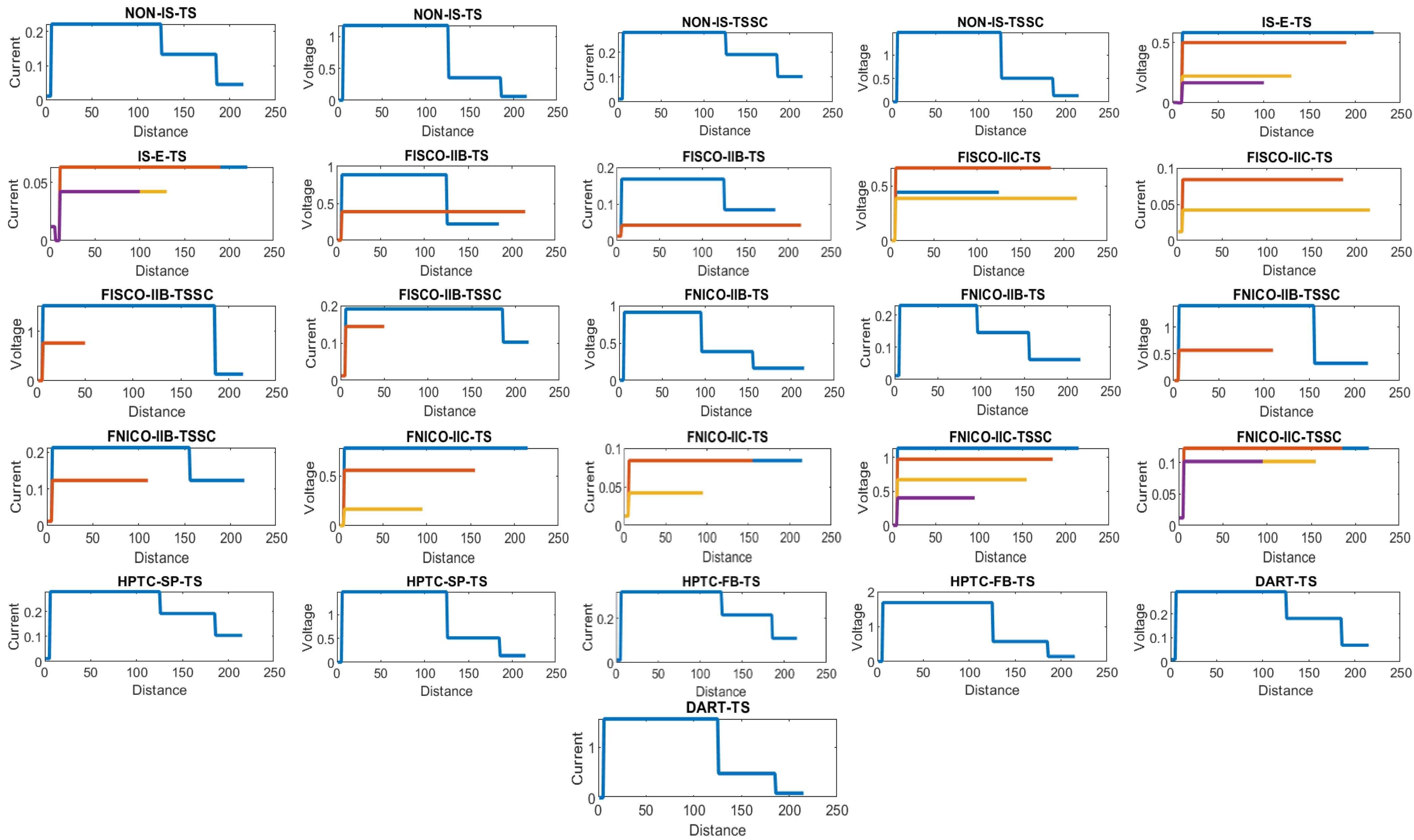
- In entity intrinsically safe models, there is no current flow in the cable connecting between the MTL5995 power supply and MTL5053 intrinsically safe barrier, and accordingly, the voltage drop on the same cable will be 0 VDC.
- For all FF models except for the HPTC model, voltage drop at any field device in the segment can be calculated by Equation (11) where is the available voltage from the segment power supply, is the voltage drop on the H1 bus main trunk cable from the power supply to the device, is the voltage drop on the connection unit to which the field device spur is connected and is the voltage drop on the spur to which the field device is connected. For all connection units (megablocks, segment protectors and field barriers), there is no voltage difference between input and output terminals connected to the H1 bus main trunk cable. is dependent of the total current consumption in the segment and overall length of the main H1 bus trunk cable, while is dependent of spur length and field device current connected to the spur. The voltage drop on any connection unit exists between the input terminals connected to the H1 bus main trunk cable and the output terminals dedicated to spur connections. In the simulated models, was equal to zero in all models except for the HPTC model based on using field barriers and segment protectors. In the DART model, will be decreased only in the first 5–10 microseconds of possible spark ignition in order to reduce the voltage delivered to the field device so that the spark would be early extinguished.
- In HPTC sub-models with the segment protectors HPTC-SP-TS and HPTC-SP-DB, constant voltage was maintained at field devices, irrespective of the voltage drop on the spur. When increasing the spur length to which the field device is connected, the segment protector will increase the voltage at the output terminals to compensate the increased voltage drop on the spur. The output voltage of the segment protector is decreased from the segment protector input voltage by a reduction coefficient, the value of which for a specific field device will decrease when increasing the spur length. In HPTC sub-models with the field barriers HPTC-FB-TS and HPTC-FB-DB, output ports dedicated to connecting field devices of a specific current maintained constant voltage all along the segment, irrespective of the voltage drop on the H1 bus trunk main cable. This constant output voltage is maintained through compensating the decreased input voltage at farther field barriers by a reduction coefficient, which is decreasing from the nearest field barrier to the farthest field barrier in the segment. For an HPTC segment consisting of K connection units (field barriers or segment protectors), each (k) connection unit has N output ports for connecting field devices. For a field device (n) connected to the connection unit (k), the voltage level at the field device () will be the difference between output voltage form the connection unit at the port connected to the device () and the voltage drop on the spur to which the device is connected (). The input voltage to the (k) connection unit () is reduced by a reduction coefficient () the value of which is dependent on the type of the connection unit, whether it was a field barrier or a segment protector. If the connection unit was a segment protector, the value of the reduction coefficient will be a function of the field device current () and voltage drop on the spur to which the field device is connected. If the connection unit was a field barrier, the value of the reduction coefficient will be a function of the field device current and the sum of the voltage drops on the H1 bus main trunk cable from the power supply to the field barrier. Accordingly, and due to equal spur lengths and equal field devices’ currents in HPTC sub-models, the voltage available at all field devices was a constant value (11.626 VDC and 11.397 VDC for HPT-FB-DB and HPT-FB-TS, respectively).
- Voltage level at farthest field device in the HPTC segment where field barriers are used is less than the voltage level at farthest field devices where segment protectors are used for a similar segment due to the fact that field barriers are dedicated to Zone1/Div2 applications, while segment protectors are dedicated to Zone2/Div2 applications.
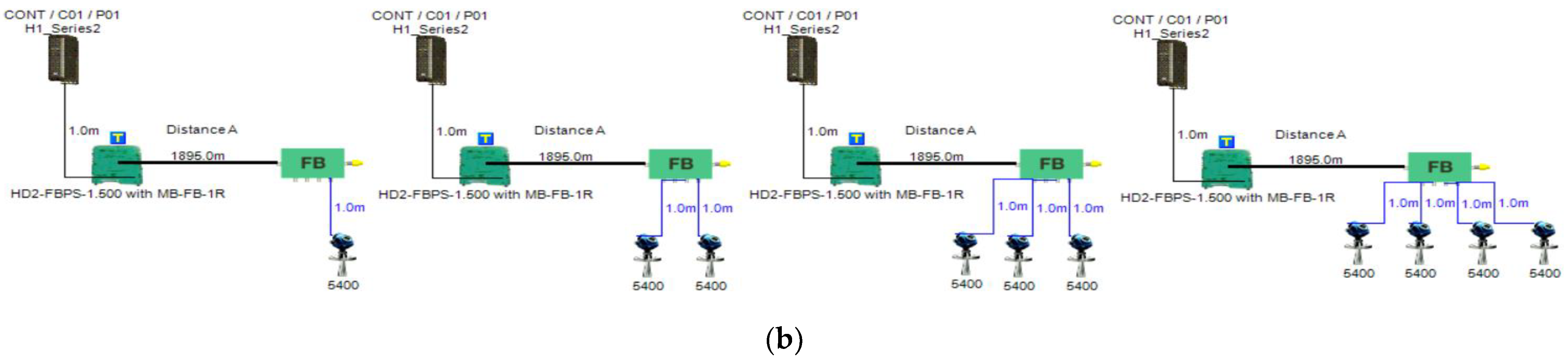
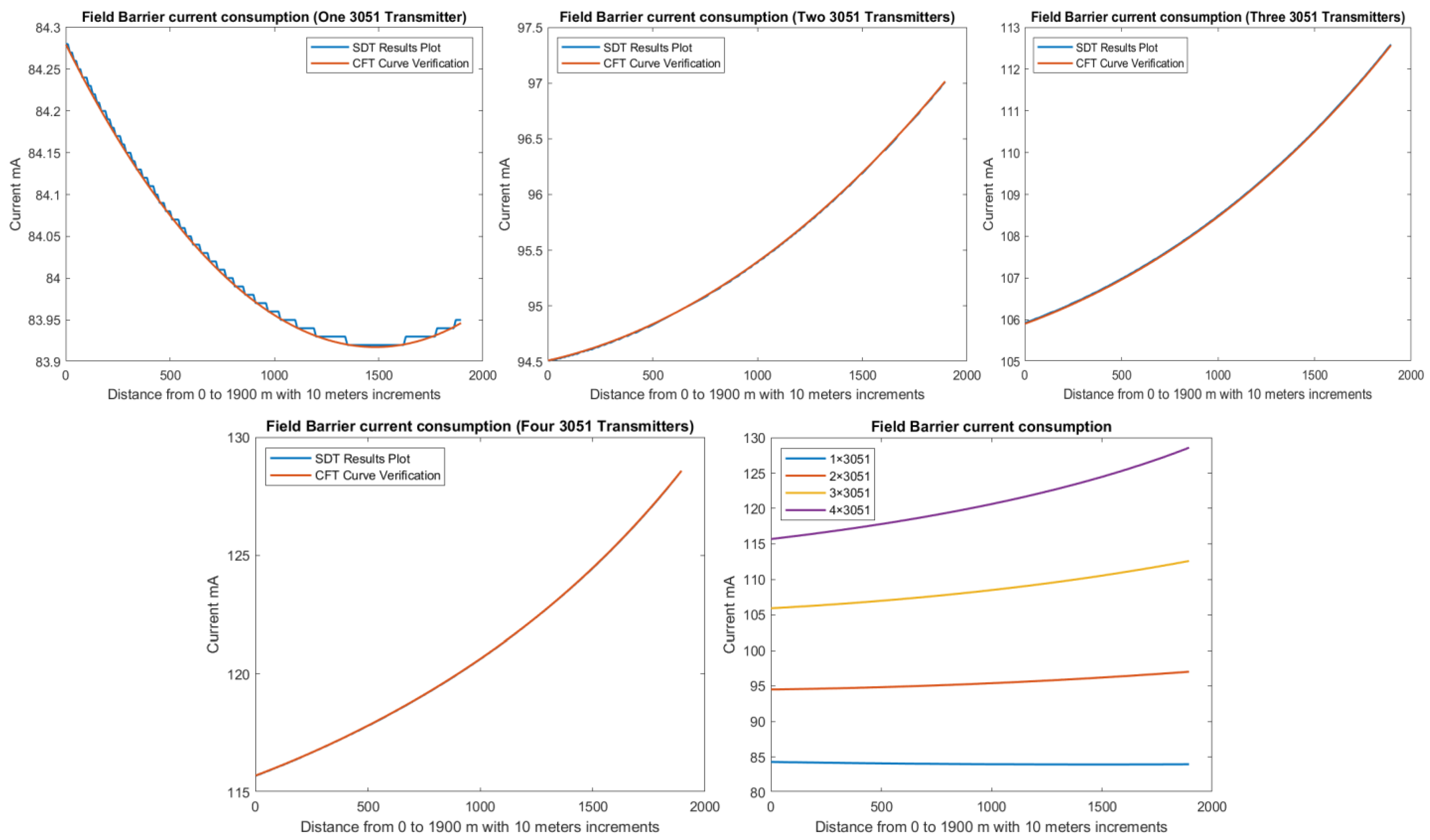
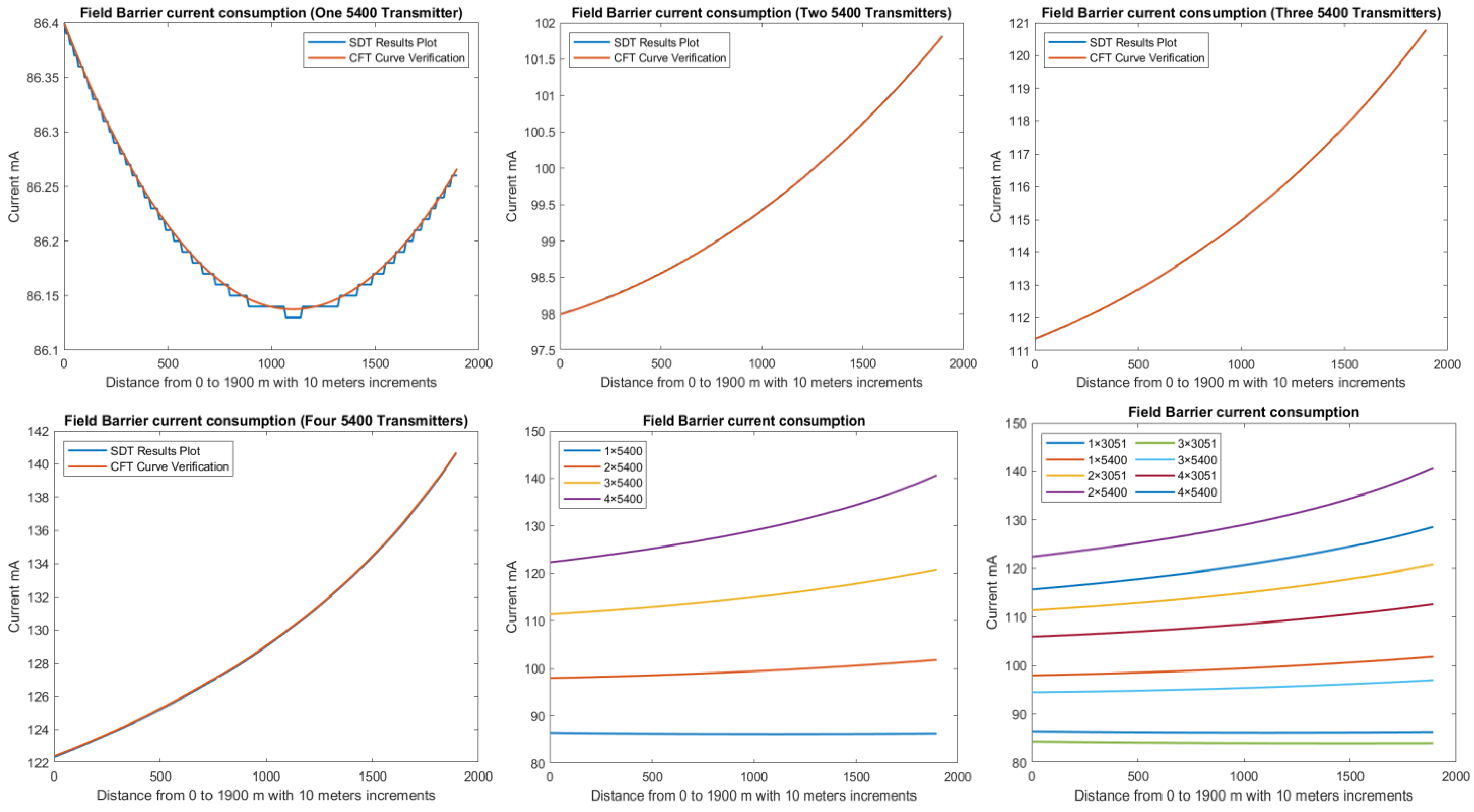
- Current consumed by field barriers in HPTC models is a function of and . Simple HPTC test models were constructed to simulate the effect of gradual increase of the overall H1 bus cable length (10–1895 m with increments of 10 m) on the current consumed by field barriers for different values of . Analysis of simulation results showed that the relation between and is a polynomial relation identified by a group of coefficients dependent on different values for the sum of the current consumed by field devices connected to the field barrier . Due to this polynomial relation, will increase with increasing . The increasing rate of with respect to is proportional to values of . For lower values of (when only a single transmitter is connected to the barrier), an initial decrease in was noticed with respect to increasing , and then will continue to follow the polynomial curve increasing with respect to increasing . The lower was the value of , the higher will be the range of the H1 bus trunk cable length through which will be decreasing. This range was almost 1490 m when a single Rosemount 3051 pressure transmitter ( = 18 mA) was connected to the field barrier, while it was almost 1100 m when a single Rosemount 5400 pressure transmitter ( = 21 mA) was connected to the field barrier. In these test models where only a single field device was connected to the field barrier, it was noticed that Emerson Segment Design Tool follows a discrete curve other than the continuous curves adopted when two, three or four transmitters were connected to the field barrier. Further detailed experimental research will be conducted in order to verify the degree of similarity between simulation and experimental results. Similarly, and for the purpose of identifying the relation between and rest of the variables and , future research will be conducted.
- The non-linear behavior of both of current consumption and output voltage in HPTC connection units (segment protectors and field barriers) is a clear demonstration of the technique adopted by the HPTC model to distribute the overall energy consumed in the segment on each of the connection units included in the segment. This demonstration is particularly depicted in the dependence of the current consumed by a specific field barrier on the current consumed by other field barriers in the segment, whether they preceded or followed that specific field barrier. Moreover, the current consumed by that specific field barrier is also dependent on the lengths of the H1 bus main trunk cable sections before the field barrier as well as after the field barrier.
- According to the simulation results obtained from Emerson Segment Design Tool, Table 3 illustrates the maximum allowable spur lengths in different Foundation Fieldbus models. For non-intrinsically safe, HPTC and DART models, maximum allowable spur length is dependent on the total number of field devices per segment; however, for entity, FISCO and FNICO models, the maximum allowable spur length in the segment is a constant value independent of the total number of field devices per segment.
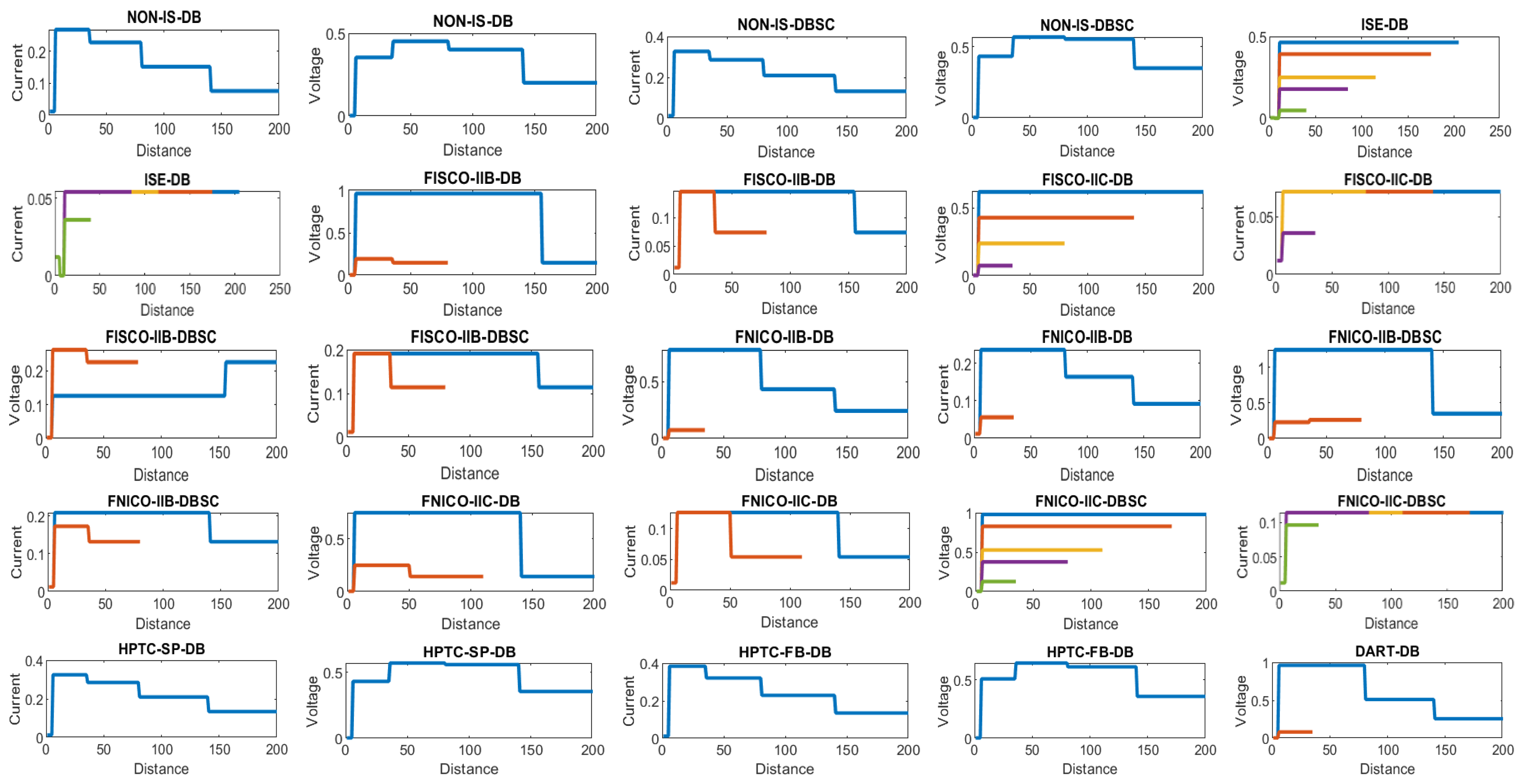
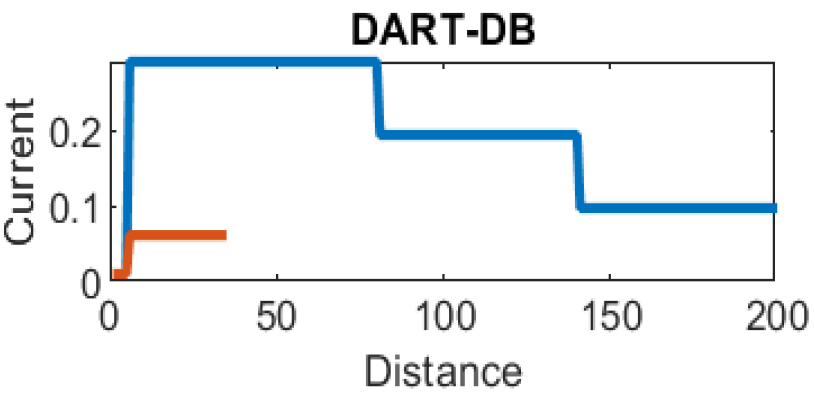
- As illustrated in Figure 10 and Figure 12, current consumption and voltage drops at H1 bus cable sections in the sub-models HPTC-FB-DB and HPTC-FB-TS are higher than current consumptions and voltage drops at H1 bus cable sections in similar sub-models NONIS-DB and NONIS-TS, respectively (sharing the same layout, dimensions and number of segments). This can be explained due to the non-linear (polynomial) characteristics of current consumed by field barriers in the HPTC model with respect to bus cable length. The current flowing in the H1 bus trunk cable where field barriers are used will be more than the current flowing in H1 bus trunk cable where regular connection units are used. Consequently, this results in higher voltage drops on H1 bus cable sections in comparison with all other FF models for similar segments in which the value of the current flowing in the H1 bus cable is independent of the H1 bus cable length and only dependent on total number of field devices connected to the bus and their currents. Similarly, and due to the same explanation, the highest total current consumption for a segment was observed at the HPTC model, as illustrated in Figure 9.
8. Conclusions
- In order to improve the performance of the 4–20 mA analogue standard in maritime engineering applications, signal isolators/conditioners are recommended to be installed at junction boxes located at areas subjected to higher levels of harsh environmental conditions such as the main deck and pipe tunnel so that ground loops can be avoided.
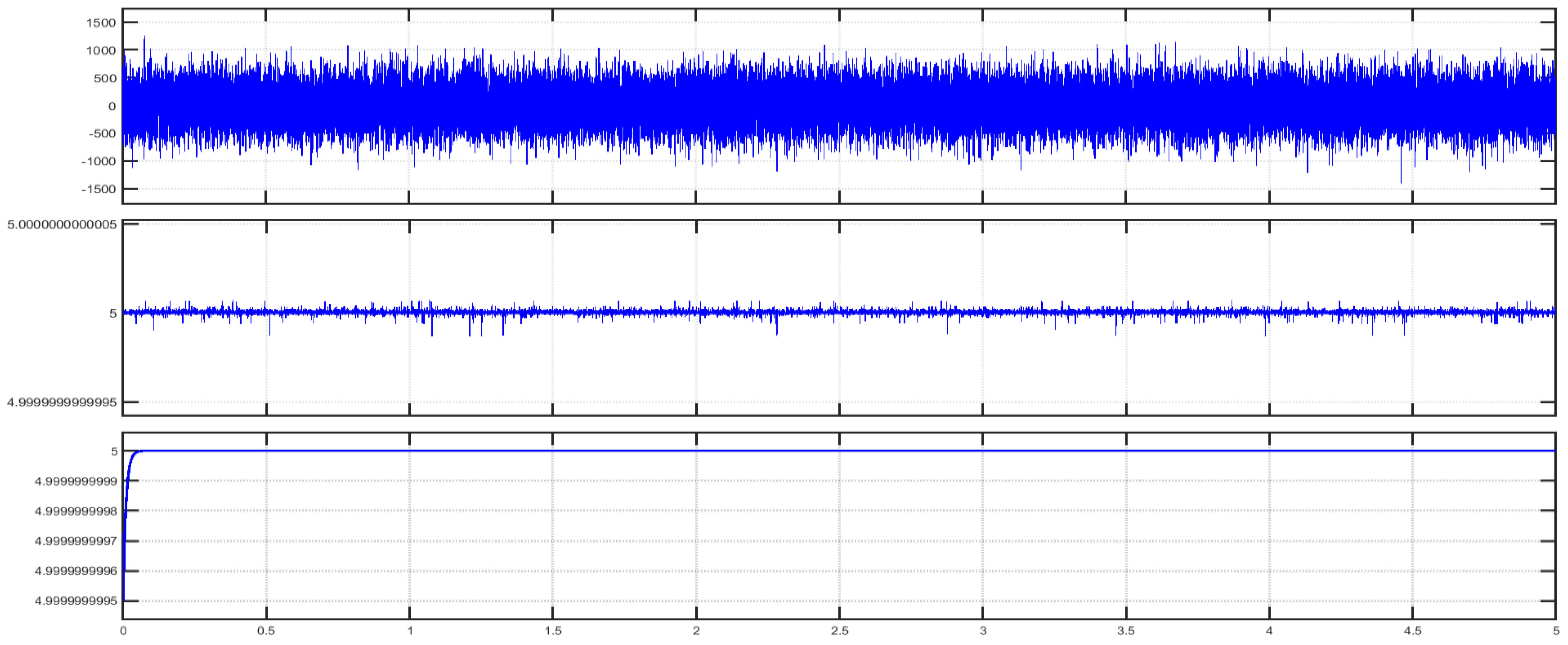
- Instrumentation amplifiers and low-pass filters are used to eliminate common mode noise voltages and coupled noise, respectively. They can be integrated inside analogue input/output modules or used separately.
- Using smart transmitters based on wired (HART and Foundation Fieldbus) or wireless (wireless HART) communication protocols can be an alternative for classical 4–20 mA analogue transmitters in maritime engineering applications, increasing reliability as well as stability of the measurement/control process with additional diagnostic and parametric information. This article considered the possible use of FF models in safe as well as explosive hazardous areas.
- For FF intrinsically safe models, the entity model requires the highest number of segments.
- Using FF connection units with short-circuit protection imposes an additional current that the segment power supply should be able to withstand in case of short-circuit occurrence.
- Short-circuit current in FF segments with short-circuit protection units is calculated only once for the last connection unit in the segment.
- There is neither current flow nor voltage drop at the cable section connecting between the segment power supply and intrinsically safe barrier in the FF entity model.
- The HPTC intrinsically safe model is the only FF model that does not require dedicated segment power supplies for it.
- Current consumed by field barriers in the HPTC intrinsically safe model is non-linearly (polynomial relation) related to H1 bus overall cable length and lengths of the H1 bus cable sections between the field barriers and total number of field devices connected to all field barriers in the segment.
- In the HPTC model based on field barriers, the voltage level at each of the output ports dedicated to connecting a specific field device is a constant voltage reduced from the input voltage to the field barrier by a reduction coefficient, the value of which is dependent on the field device current and the voltage drop on the H1 bus main trunk cable. The value of the reduction coefficient is decreased when the overall H1 bus cable length is increased.
- In the HPTC model based on segment protectors, the voltage level at a specific field device connected to a specific segment protector is a constant voltage less than the input voltage to the field barrier by a reduction coefficient, the value of which is dependent of the field device current and the voltage drop on the spur cable to which the device is connected. The value of the reduction coefficient is decreased when spur length connected to the field device is increased.
- Maximum allowable spur length in the segment is dependent on the number of field devices in the segment for non-intrinsically safe, HPTC and DART models.
- Maximum allowable spur length in the segment is independent of the number of field devices in the segment for entity, FISCO and FNICO models.
- In a single FF segment, the highest current consumption in H1 bus cable sections is at the closest section to the segment power supply connecting between the power supply and first connection unit; however, for the voltage drop on H1 bus cable sections, it is not a condition that sections with the highest current should have the highest voltage drop across them, as it is also dependent on the length of cable section.
- Higher FF segment lengths are observed with models that consist of a lower number of segments.
- For similar segments (sharing the same layout and connection diagram), current flow in the H1 bus cable as well as voltage drop on the same H1 bus cable, where the HPTC model (with field barriers) is adopted, is higher than the current flow and voltage drop in the H1 bus cable of the same length where other FF models will be adopted.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AMS | Asset Management System |
| CD | Compel Data |
| CSMA/CA | Carrier Sense Multiple Access/Collision Avoidance |
| DART | Dynamic Arc Recognition and Termination |
| DART DB | DART model for Double Bottom tanks |
| DART TS | DART model for Top Side tanks |
| DDT | Distributed Data Transfer |
| DSSS | Direct Sequence Spread Spectrum |
| FAS | Fieldbus Access Sublayer |
| FF | Foundation Fieldbus |
| FHSS | Frequency Hopping Spread Spectrum |
| FISCO | Fieldbus Intrinsically Safe Concept |
| FISCO-IIB-DB | FISCO IIB model for Double bottom ballast tanks without Short Circuit Protection |
| FISCO-IIB-DBSC | FISCO IIB model for Double bottom ballast Tanks with Short Circuit Protection |
| FISCO-IIB-TS | FISCO IIB model for Top Side ballast tanks without Short Circuit Protection |
| FISCO-IIB-TSSC | FISCO IIB model for Top Side ballast Tanks with Short-Circuit Protection |
| FISCO-IIC-DB | FISCO IIC model for Double bottom ballast tanks without Short Circuit Protection |
| FISCO-IIC-TS | FISCO IIC model for Top Side ballast tanks without Short Circuit Protection |
| FMS | Fieldbus Message Specification |
| FNICO | Fieldbus Non + Incendive Concept |
| FNICO-IIB-DB | FNICO IIB model for Double bottom ballast tanks without Short Circuit Protection |
| FNICO-IIB-DBSC | FNICO IIB model for Double bottom ballast Tanks with Short-Circuit Protection |
| FNICO-IIB-TS | FNICO IIB model for Top Side ballast tanks without Short Circuit Protection |
| FNICO-IIB-TSSC | FNICO IIB model for Top Side ballast Tanks with Short-Circuit Protection |
| FNICO-IIC-DBSC | FNICO IIC model for Double bottom ballast Tanks with Short-Circuit Protection |
| FNICO-IIC-DB | FNICO IIC model for Double bottom ballast tanks without Short Circuit Protection |
| FNICO-IIC-TS | FNICO IIB model for Top Side ballast tanks without Short Circuit Protection |
| FNICO-IIC-TSSC | FNICO IIC model for Top Side ballast Tanks with Short-Circuit Protection |
| HART | Highway Addressable Remote Transducer |
| HPTC-FB-DB | HPTC model with Field Barriers for Double Bottom tanks |
| HPTC-FB-TS | HPTC model with Field Barriers for Top Side tanks |
| HPTC-SP-DB | HPTC model with Segment Protectors for Double Bottom tanks |
| HPTC-SP-TS | HPTC model with Segment Protectors for Top Side tanks |
| HPTC | High-Power Trunk Concept |
| IEC | International Electrotechnical Committee |
| IS-E-DB | Intrinsically Safe Entity model for Double Bottom Tanks |
| IS-E-TS | Intrinsically Safe Entity model for Top Side Tanks |
| JRMNL | Joint Routing algorithm for maximizing network lifetime |
| LAS | Link Active Scheduler |
| LPF | Low-Pass Filter |
| LPG | Liquefied Petroleum Gas |
| MAC | Medium Access Control |
| NONIS-DB | Non-Intrinsically Safe model for Double Bottom Ballast Tanks without Short-Circuit Protection |
| NONIS-DBSC | Non-Intrinsically Safe model for Double Bottom Ballast Tanks with Short-Circuit Protection |
| NONIS-TS | Non-Intrinsically Safe model for Top Side Ballast Tanks without Short-Circuit Protection |
| NONIS-TS-SC | Non-Intrinsically Safe model for Top Side Ballast Tanks with Short-Circuit Protection |
| OSI | Open Systems Interconnection |
| PN | Probe Node |
| PT | Pass Token |
| SPM | Static Process Monitoring |
| SDT | Segment Design Tool |
| TD | Time Distribution |
| TDMA | Time Division Multiple Access |
| TSMP | Time Synchronization Mesh Protocol. |
| UART | Universal Asynchronous Receiver Transmitter |
Appendix A
MATLAB Function in ADC in Simulink Model in Figure 4
| function [B1,B2,B3,B4,B5,B6,B7,B8] = ADC(u) gj = abs(u); ADCoutput = de2bi(gj,8,’right-msb’); B1 = ADCoutput(1); B2 = ADCoutput(2); B3 = ADCoutput(3); B4 = ADCoutput(4); B5 = ADCoutput(5); B6 = ADCoutput(6); B7 = ADCoutput(7); B8 = ADCoutput(8); |
Appendix B
Datasheets
References
- Dudojc, B.; Mindykowski, J. New Approach to Analysis of Selected Measurement and Monitoring Systems Solutions in Ship Technology. Sensors 2019, 19, 1775. [Google Scholar] [CrossRef] [PubMed]
- Abotaleb, M.; Mindykowski, J.; Dudojc, B.; Masnicki, R. Digital Communication Links Cooperating with the Analog 4–20 mA Standard for Marine Applications. Bull. Polytech. Inst. Iași. Electr. Eng. Power Eng. Electron. Sect. 2021, 67, 21–44. [Google Scholar] [CrossRef]
- Berge, J.; Margo, M.C.; Pinceti, P. Configuring Intelligent Field Devices. In Instrumentation and Automation Engineers’ Handbook, 5th ed.; Volume 1: Measurement and Safety; Liptak, B.G., Venczel, K., Eds.; International Society of Automation (ISA): Durham, NC, USA, 2017; pp. 35–55. [Google Scholar]
- Hidalgo, R.O. Sensor Diagnostic HART Overlay 4–20 mA. Master’s Thesis, University of Stavanger, Stavanger, Norway, 2011; pp. 11–37. [Google Scholar]
- Park, J.; Mackay, S.; Wright, E. Practical Data Communications for Instrumentation and Control, 1st ed.; Newnes: Oxford, UK, 2003; pp. 238–249. [Google Scholar]
- Sen, S.K. Highway Addressable Remote Transducer (HART). In Fieldbus and Networking in Process Automation, 1st ed.; CRC Press: Boca Raton, FL, USA, 2014; pp. 93–108. [Google Scholar]
- Barreira, J.M.D.; Postolache, O.; Girao, P.S. HART Protocol Analyser Based in LabVIEW. In Proceedings of the IEEE International Workshop on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, Lviv, Ukraine, 8–10 September 2003. [Google Scholar]
- Emerson Automation Solutions. Rosemount 3051S Series Scalable Pressure, Flow, and Level Solution with HART Protocol, Reference Manual 00809-0100-4801, Rev HA; Emerson Automation Solutions: Chanhassen, MN, USA, 2018; pp. 115–130. [Google Scholar]
- Verhappen, I.; Pereira, A. Foundation Fieldbus, 4th ed.; International Society of Automation: Eindhoven, The Netherlands, 2012; pp. 1–38. [Google Scholar]
- Tooley, M. Plant and Process Engineering 360, 1st ed.; Newnes: Oxford, UK, 2009; pp. 176–180. [Google Scholar]
- Mehta, B.R.; Reddy, Y.J. Applying Foundation Fieldbus, 3rd ed.; International Society of Automation: Durham, NC, USA, 2016; pp. 21–55, pp. 114–129. [Google Scholar]
- Sen, S.K. Foundation Fieldbus. In Fieldbus and Networking in Process Automation, 1st ed.; CRC Press: Boca Raton, FL, USA, 2014; pp. 109–146. [Google Scholar]
- Viegas, V.; Periera, J.M.D. Foundation Fieldbus: From Theory to Practice. Int. J. Comput. 2000, 12, 115–124. Available online: https://www.researchgate.net/publication/260982455_Foundation_Fieldbus_From_Theory_To_Practice (accessed on 5 February 2022). [CrossRef]
- Abotaleb, M.; Mindykowski, J.; Dudojc, B.; Masnicki, R. Simulation of Foundation Fieldbus Manchester coded 31.25 kbps H1 bus using Matlab and Simulink. Sci. J. Gdyn. Marit. Univ. 2022. accepted. [Google Scholar]
- Emerson Automation Solutions. Rosemount 3051 Pressure Transmitter with Foundation Fieldbus Protocol, Reference Manual 00809-0100-4774, Rev DA; Emerson Automation Solutions: Chanhassen, MN, USA, 2017; pp. 93–103. [Google Scholar]
- Sen, S.K. Wireless HART. In Fieldbus and Networking in Process Automation, 1st ed.; CRC Press: Boca Raton, FL, USA, 2014; pp. 315–354. [Google Scholar]
- Biasi, M.D. Implementation of a WirelessHART Simulator and Its Use in Studying Packet Loss Compensation in Networked Control. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, February 2008. [Google Scholar]
- Chen, D.; Nixon, M.; Mok, A. WirelessHART™ Real-Time Mesh Network for Industrial Automation, 1st ed.; Springer Science + Business Media: New York, NY, USA, 2010; pp. 3–38. [Google Scholar] [CrossRef]
- Dust Networks, Inc. Technical Overview of Time Synchronized Mesh Protocol (TSMP); Document Number: 025-0003-01; Dust Networks, Inc.: Milpitas, CA, USA, 2006. [Google Scholar]
- Kochanska, I.; Schmidt, J.H. Simulation of Direct-Sequence Spread Spectrum Data Transmission System for Reliable Underwater Acoustic Communications. Vib. Phys. Syst. 2019, 30, 1–8. [Google Scholar]
- Motlagh, N.H. Frequency Hopping Spread Spectrum: An Effective Way to Improve Wireless Communication Performance. In Advanced Trends in Wireless Communications; IntechOpen Limited: London, UK, 2011. [Google Scholar] [CrossRef]
- Ullah, S.; Shen, B.; Islam, S.M.R.; Khan, P.; Saleem, S.; Kwak, K.S. A Study of MAC Protocols for WBANs. Sensors 2010, 10, 128–145. [Google Scholar] [CrossRef] [PubMed]
- Amara, Y.; Beghdad, R. Improving the Collision Avoidance of the CSMA/CA Medium Access Control Protocol. WSEAS Trans. Comput. 2004, 3, 1331–1336. [Google Scholar]
- Ho, T.S.; Chen, K.S. Performance analysis of IEEE 802.11 CSMA/CA medium access control protocol. In Proceedings of the PIMRC’96—7th International Symposium on Personal, Indoor, and Mobile Communications, Taipei, Taiwan, 18 October 1996. [Google Scholar]
- Nobre, M.; Ivanovitch, S.; Guedes, L.A. Routing and Scheduling Algorithms for WirelessHART Networks: A Survey. Sensors 2015, 15, 9703–9740. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Yan, A.; Ma, T. Energy-Balanced Routing for Maximizing Network Lifetime in WirelessHART. Int. J. Distrib. Sens. Netw. 2013, 2013, 173185. [Google Scholar] [CrossRef]
- Potter, D.; Eren, H. Data Acquisition Fundamentals. In Instrument Engineers’ Handbook, 4th ed.; Volume 3: Process Software and Digital Networks; Liptak, B.G., Eren, H., Eds.; CRC Press: Boca Raton, FL, USA, 2012; pp. 335–338, pp. 342–345. [Google Scholar]
- Moore Industries. Signal Isolators, Converters and Interfaces: The Ins and Outs; Moore Industries Worldwide: North Hills, CA, USA, 2008; pp. 1–12. [Google Scholar]
- Khosroanjom, M.; Moslehi, S.A. Novel Approach to Analog Signal Isolation through Digital Opto-coupler (YOUTAB). Mod. Appl. Sci. 2011, 5, 225–230. [Google Scholar] [CrossRef] [Green Version]
- Apex Microtechnology. Voltage to Current Conversion—AN13U REV F; Apex Microtechnology: Tucson, AZ, USA, 2013; pp. 1–4. [Google Scholar]
- Voltage to Current Converters (V to I Converters). Available online: https://www.electrical4u.com/voltage-to-current-converter/ (accessed on 5 February 2022).
- Kitchin, C.; Counts, L. Inside an Instrumentation Amplifier. In A Designer’s Guide to Instrumentation Amplifiers, 3rd ed.; Analog Devices: Norwood, MA, USA, 2006; Volume 3, pp. 2-1–2-6. [Google Scholar]
- Zumbahlen, H. Analog Filters. In Op Amp Applications Handbook, 1st ed.; Jung, W., Ed.; Newnes: Oxford, UK, 2005; pp. 309–419. [Google Scholar]
- Sen, S.K. Intrinsically Safe Fieldbus Systems. In Fieldbus and Networking in Process Automation, 1st ed.; CRC Press: Boca Raton, FL, USA, 2014; pp. 245–258. [Google Scholar]
- Beck, A.; Hennecke, A. Intrinsically Safe Fieldbus in Hazardous Areas; Pepperl + Fuchs GmbH: Mannheim, Germany, 2008; pp. 1–12. [Google Scholar]
- Eaton Electric Limited. MTL5000 Range Isolating Interface Units, Instruction Manual, MTL Fieldbus Networks; Eaton Electric Limited: Luton, UK, 2016; pp. 25–32. [Google Scholar]
- Kegel, G.; Kessler, M.; Rogoll, G. FISCO-Model versus Conventional Intrinsic Safety Evaluation in Fieldbus Technology; Foundation Fieldbus End User Council Australia Inc.: Perth, Australia, 2001; pp. 1–10. [Google Scholar]
- Eaton Electric Limited. FISCO Intrinsically Safe Fieldbus Systems, Application Note AN9026; Eaton Electric Limited: Luton, UK, 2005; pp. 1–24. [Google Scholar]
- Eaton Electric Limited. FNICO Non-Incendive Fieldbus System, Application Note AN9027 Rev. 5; Eaton Electric Limited: Luton, UK, 2016; pp. 1–36. [Google Scholar]
- Saward, P. Fieldbus Non-Incendive Concept Takes FISCO into Zone 2 and Division 2 Hazardous Areas; Foundation Fieldbus End Users Council Australia Inc.: Perth, Australia, 2003; pp. 1–10. [Google Scholar]
- Schuessler, B. The High Power Trunk Alternative to FISCO and FNICO; Pepperl + Fuchs GmbH: Mannheim, Germany, 2007; pp. 1–8. [Google Scholar]
- Klatt, T. DART—The Future of Explosion Protection Technology; IChemE: Mannheim, Germany, 2009. [Google Scholar]
- ARC Advisory Group. DART Ushers in the Next Generation of Intrinsic Safety; ARC Advisory Group: Dedham, MA, USA, 2011; pp. 1–12. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
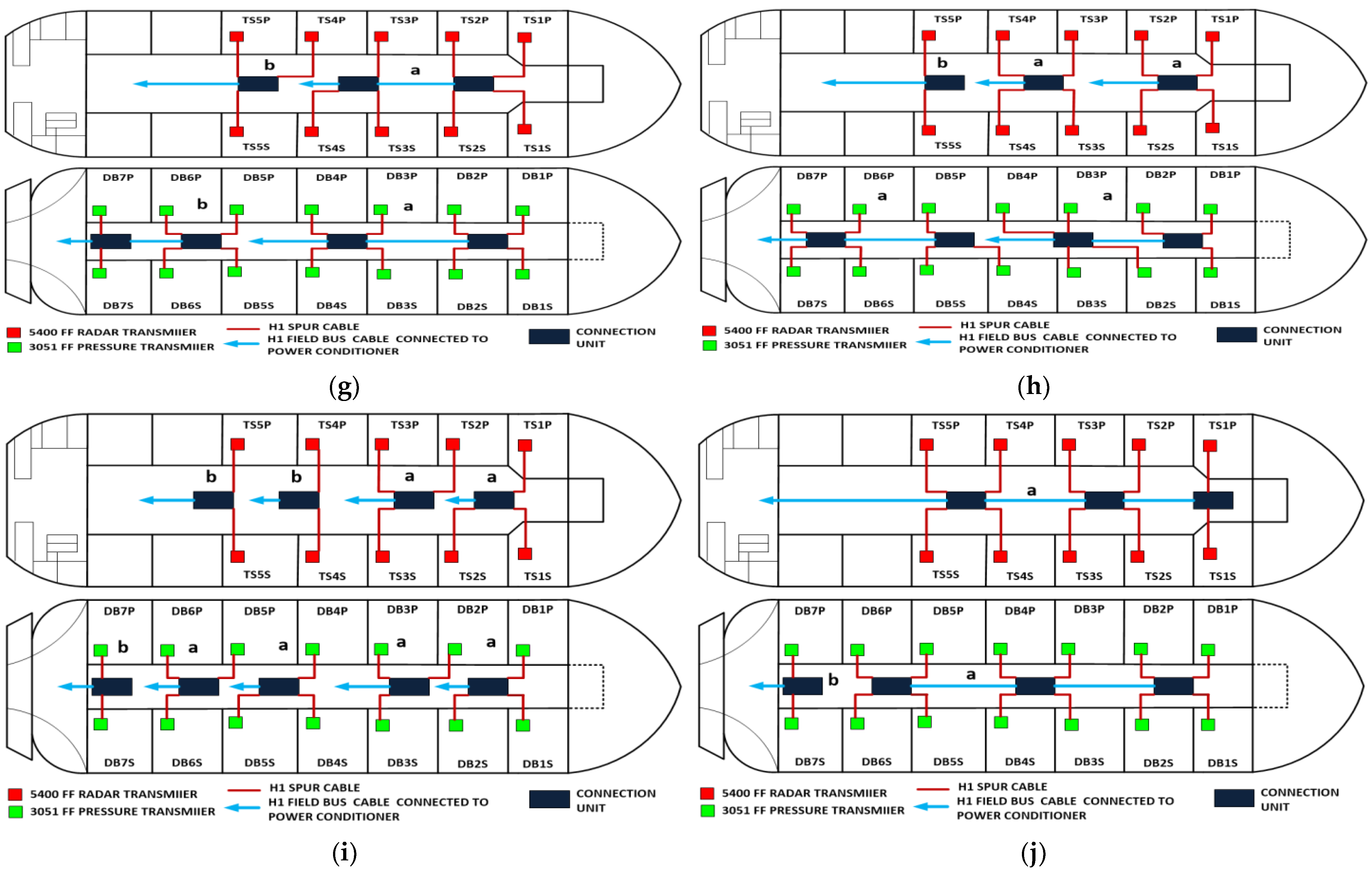
| FF Sub-Model | Layout of Field Device Connection Blocks |
|---|---|
| S/M: NONIS-DB Figure 7a No.S: a(1) No.T/S: a(14) P/S: HD2-FBPS 1 2.3.500 A/V: 21 VDC C/U: FCS-MB4 T.Cur: 280 mA T.Cur/R.Cur = 56% Max.S/L: length: 60 m | 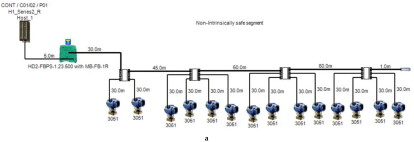 |
| S/M: NONIS-DBSC Figure 7a No.S: a(1) No.T/S: a(14) P/S: HD2-FBPS 1 2.3.500 A/V: 21 VDC C/U: JBBS-49SC-E413 T.Cur: 339 mA T.Cur/R.Cur = 67.8% Max.S/L: 60 m | 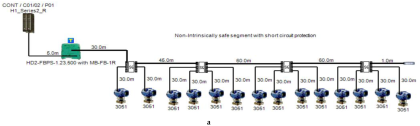 |
| S/M NONIS-TS Figure 7a No.S: a(1) No.T/S: a(10) P/S: HD2-FBPS 1 2.3.500 A/V: 21 VDC C/U: FCS-MB4 T.Cur: 234 mA T.Cur/R.Cur = 46.8% Max.S/L: 120 m |  |
| S/M: NONIS-TSSC Figure 7a No.S: a(1) No.T/S: a(10) P/S: HD2-FBPS 1 2.3.500 A/V: 21 VDC C/U: JBBS-49SC-E413 T.Cur: 292 mA T.Cur/R.Cur = 58.4% Max.S/L: 120 m | 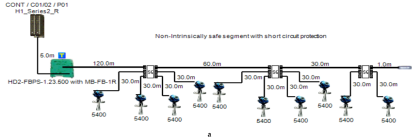 |
| S/M: IS-E-DB Figure 7b No.S: a(4), b(1) No.T/S: a(3), b(2) P/S: MTL5995- MTL5053 A/V: 12.168 VDC C/U: 6 Port Brick T.Cur: 54, 36 mA T.Cur/R.Cur = 67.5%, 45% Max.S/L: 120 m |  |
| S/M: IS-E-TS Figure 7b No.S: a(2), b(2) No.T/S: a(3), b(2) P/S: MTL5995- MTL5053 A/V: 12.168 VDC C/U: 6 Port Brick T.Cur: 63, 42 mA T.Cur/R.Cur = 78.75%, 52.5% Max.S/L: 120 m |  |
| S/M: FISCO-IIB-DB Figure 7c No.S: a(2) No.T/S: a(7) P/S: MTL9122-IS A/V: 12.942 VDC C/U: 6 Port Brick T.Cur: 138 mA T.Cur/R.Cur = 53.9% Max.S/L: 60 m |  |
| S/M: FISCO-IIB-TS Figure 7c No.S: a(1), b(1) No.T/S: a(8), b(2) P/S: MTL9122-IS A/V: 12.942 VDC C/U: 6 Port Brick T.Cur: 200, 54 mA T.Cur/R.Cur = 75.47%, 20.38% Max.S/L: 60 m |  |
| S/M: FISCO-IIC-DB Figure 7d No.S: a(3), b(1) No.T/S: a(4), b(2) P/S: MTL9121-IS A/V: 12.316 VDC C/U: 6 Port Brick T.Cur: 84, 68 mA T.Cur/R.Cur = 70%, 56.7% Max.S/L: 60 m |  |
| S/M: FISCO-IIC-TS Figure 7d No.S: a(2), b(1) No.T/S: a(4), b(2) P/S: MTL9121-IS A/V: 12.316 VDC C/U: 6 Port Brick T.Cur: 96, 54 mA T.Cur/R.Cur = 80%, 45% Max.S/L: 60 m | 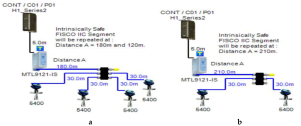 |
| S/M: FISCO-IIB-DBSC Figure 7e No.S: a(2) No.T/S: a(7) P/S: MTL9122-IS A/V: 12.897 VDC C/U: JBBS-49SC-E413 T.Cur: 203 mA T.Cur/R.Cur = 76.6% Max.S/L: 60 m | 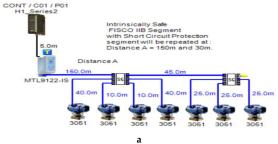 |
| S/M: FISCO-IIB-TSSC Figure 7e No.S: a(1), b(1) No.T/S: a(6), b(4) P/S: MTL9122-IS A/V: 12.897,12.944 VDC C/U: JBBS-49SC-E413 T.Cur: 203, 156 mA T.Cur/R.Cur = 76.6%, 58.87%, Max.S/L: 60 m | 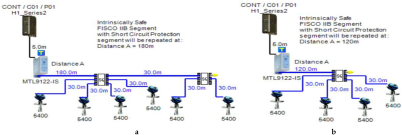 |
| S/M: FNICO-IIB-DB Figure 7f No.S: a(1), b(1) No.T/S: a(12), b(2) P/S: MTL9112-IS-NI A/V: 12.852, 13.032 VDC C/U: 6 Port Brick T.Cur: 248, 68 mA T.Cur/R.Cur = 77.5%, 21.25% Max.S/L: 60 m | 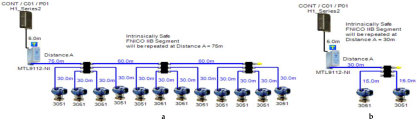 |
| S/M: FNICO-IIB-TS Figure 7f No.S: a(1) No.T/S: a(10) P/S: MTL9112-NI A/V: 12.858 VDC C/U: 6 Port Brick T.Cur: 242 mA T.Cur/R.Cur = 75.63% Max.S/L: 60 m |  |
| S/M: FNICO-IIB-DBSC Figure 7g No.S: a(1), b(1) No.T/S: a(8), b(6) P/S: MTL9112-NI A/V: 12.879, 12.915 VDC C/U: JBBS-49SC-E413 T.Cur: 221, 185 mA T.Cur/R.Cur = 69.1%, 57.81% Max.S/L: 60 m |  |
| S/M: FNICO-IIB-TSSC Figure 7g No.S: a(1), b(1) No.T/S: a(7), b(3) P/S: MTL9112-NI A/V: 12.876, 12.965 VDC C/U: JBBS-49SC-E413 T.Cur: 224, 135 mA T.Cur/R.Cur = 70%, 42.19% Max.S/L: 60 m | 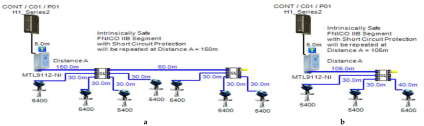 |
| S/M: FNICO-IIC-DB Figure 7h No.S: a(2) No.T/S: a(7) P/S: MTL9111-NI A/V: 12.262 VDC C/U: 6 Port Brick T.Cur: 138 mA T.Cur/R.Cur = 76.7% Max.S/L: 60 m | 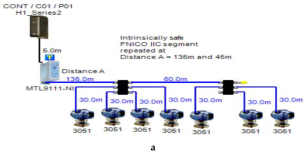 |
| S/M: FNICO-IIC-TS Figure 7h No.S: a(2), b(1) No.T/S: a(4), b(2) P/S: MTL9111-NI A/V: 12.304, 12.346 VDC C/U: 6 Port Brick T.Cur: 96, 54 mA T.Cur/R.Cur = 53.33%, 30% Max.S/L: 60 m | 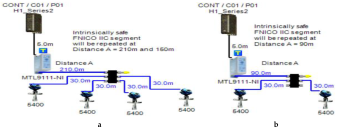 |
| S/M: FNICO-IIC-DBSC Figure 7i No.S: a(4), b(1) No.T/S: a(3), b(2) P/S: MTL9111-NI A/V: 12.274, 12.292 VDC C/U: JBBS-49SC-E413 T.Cur: 126, 108 mA T.Cur/R.Cur = 70%, 60% Max.S/L: 60 m | 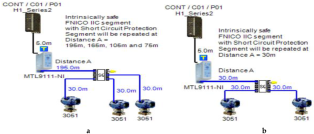 |
| S/M: FNICO-IIC-TSSC Figure 7i No.S: a(2), b(2) No.T/S: a(3), b(2) P/S: MTL9111-NI A/V: 12.265, 12.286 VDC C/U: JBBS-49SC-E413 T.Cur: 135, 114 mA T.Cur/R.Cur = 75%, 63.33% Max.S/L: 60 m |  |
| S/M: HPTC-SP-DB Figure 7a No.S: a(1) No.T/S: a(14) P/S: HD2-FBPS 1 2.3.500 A/V: 21 VDC C/U: R2-SP-N4 T.Cur: 338 mA T.Cur/R.Cur = 67.6% Max.S/L: 60 m |  |
| S/M: HPTC-SP-TS Figure 7a No.S: a(1) No.T/S: a(10) P/S: HD2-FBPS 1 2.3.500 A/V: 21 VDC C/U: R2-SP-N4 T.Cur: 292 mA T.Cur/R.Cur = 58.4% Max.S/L: 120 m |  |
| S/M: HPTC-FB-DB Figure 7a No.S: a(1) No.T/S: a(14) P/S: HD2-FBPS 1 2.3.500 A/V: 21 VDC C/U: FB-Ex4 T.Cur: 395.57 mA T.Cur/R.Cur = 79.114% Max.S/L: 60 m |  |
| S/M: HPTC-FB-TS Figure 7a No.S: a(1) No.T/S: a(10) P/S: HD2-FBPS 1 2.3.500 A/V: 21 VDC C/U: FB-Ex4 T.Cur: 331.11 mA T.Cur/R.Cur = 66.222% Max.S/L: 120 m |  |
| S/M: DART-DB Figure 7j No.S: a(1) No.T/S: a(10) P/S: HD2-FBPS-IBD-1.24.360 A/V: 21 VDC C/U: R3-SP-IBD12 T.Cur: 291 mA T.Cur/R.Cur = 80.83% Max.S/L: 60 m | 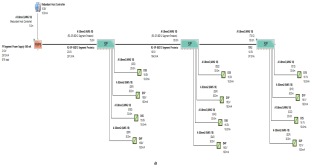 |
| S/M: DART-DB Figure 7j No.S: b(1) No.T/S: b(2) P/S: HD2-FBPS-IBD-1.24.360 A/V: 21 VDC C/U: R3-SP-IBD12 T.Cur: 61 mA T.Cur/R.Cur = 16.95% Max.S/L: 120 m | 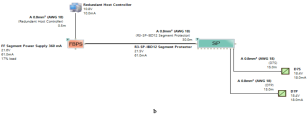 |
| S/M: DART-TS Figure 7j No.S: a(1) No.T/S: a(10) P/S: HD2-FBPS-IBD-1.24.360 A/V: 21 VDC C/U: R3-SP-IBD12 T.Cur: 295 mA T.Cur/R.Cur = 81.95% Max.S/L: 90 m |  |
| Model | Coefficients | Model | Coefficients |
|---|---|---|---|
| One Transmitter Rosemount 3051 = 18 mA | 4.739 =−2.006 1.928 −0.0005017 | One Transmitter Rosemount 5400 = 21 mA | 1.537 =−1.202 2.368 −0.0004866 |
| Two Transmitters Rosemount 3051 = 36 mA | =−1.425 4.713 0.0004212 | Two Transmitters Rosemount 5400 = 42 mA | 1.503 =−7.597 1.045 −0.002513 |
| Three Transmitter Rosemount 3051 = 54 mA | 2.741 = 2.596 8.163 0.001693 | Three Transmters Rosemount 5400 = 63 mA | 7.238 =−2.006 1.928 −0.0005017 |
| Four Transmitter Rosemount 3051 = 72 mA | 1.723 = −1.098 1.282 0.00359 | Four Transmitters Rosemount 5400 = 84 mA | 5.108 = −6.964 2.04 −0.004815 |
| FF Model | Maximum Allowable Spur Length |
|---|---|
| Non-intrinsically safe | (1–10 field devices) (120 m) (11–12 field devices) (90 m) (Field devices > 12) (60 m) |
| HPTC | (1–11 field devices) (120 m) (12–13 field devices) (90 m) (Field devices > 13) (60 m) |
| DART | (1–10 field devices) (120 m) (11 devices) (90 m) (Field devices ≥ 13) (60 m) |
| Entity | 120 m |
| FISCO | 60 m |
| FNICO | 60 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abotaleb, M.; Mindykowski, J.; Dudojc, B.; Masnicki, R. Case-Study-Based Overview of Methods and Technical Solutions of Analog and Digital Transmission in Measurement and Control Ship Systems. Sensors 2022, 22, 6931. https://doi.org/10.3390/s22186931
Abotaleb M, Mindykowski J, Dudojc B, Masnicki R. Case-Study-Based Overview of Methods and Technical Solutions of Analog and Digital Transmission in Measurement and Control Ship Systems. Sensors. 2022; 22(18):6931. https://doi.org/10.3390/s22186931
Chicago/Turabian StyleAbotaleb, Mostafa, Janusz Mindykowski, Boleslaw Dudojc, and Romuald Masnicki. 2022. "Case-Study-Based Overview of Methods and Technical Solutions of Analog and Digital Transmission in Measurement and Control Ship Systems" Sensors 22, no. 18: 6931. https://doi.org/10.3390/s22186931