
Path Planning and Collision Risk Management Strategy for Multi-UAV Systems in 3D Environments

 , , , ,
, , , ,  and
and
Abstract
:1. Introduction
- Respect the geometry of the environment.
- Ensure a safe distance of the vehicle with respect to objects.
- Minimize the risk of collisions.
- Provide a route that is navigable by the vehicle, i.e., that respects its kinematic restrictions.
- Detect possible collision threats.
- Analyze the actual collision probability and define decision criteria.
- Implement the collision avoidance algorithm.
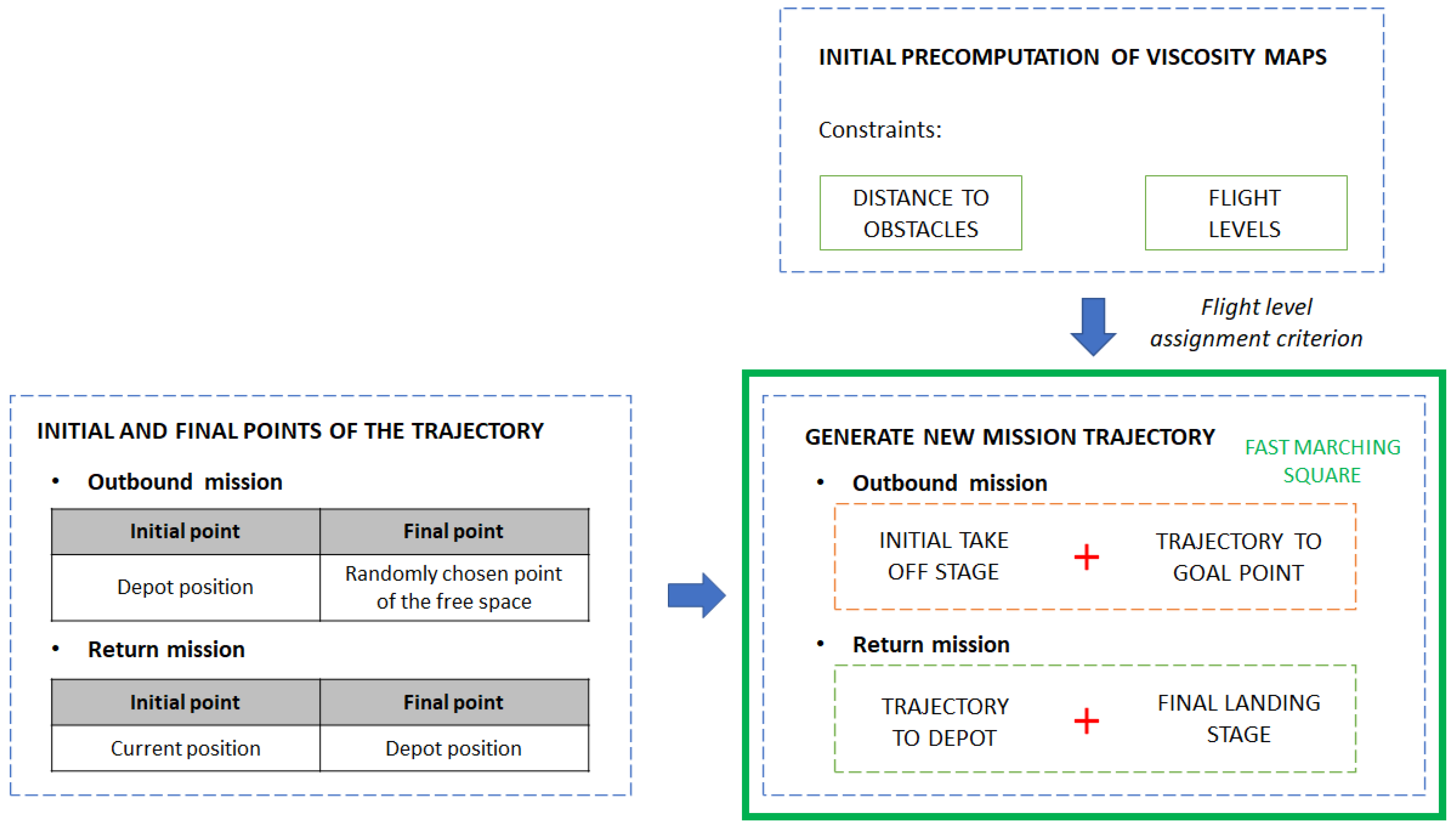
2. Description of the Approach
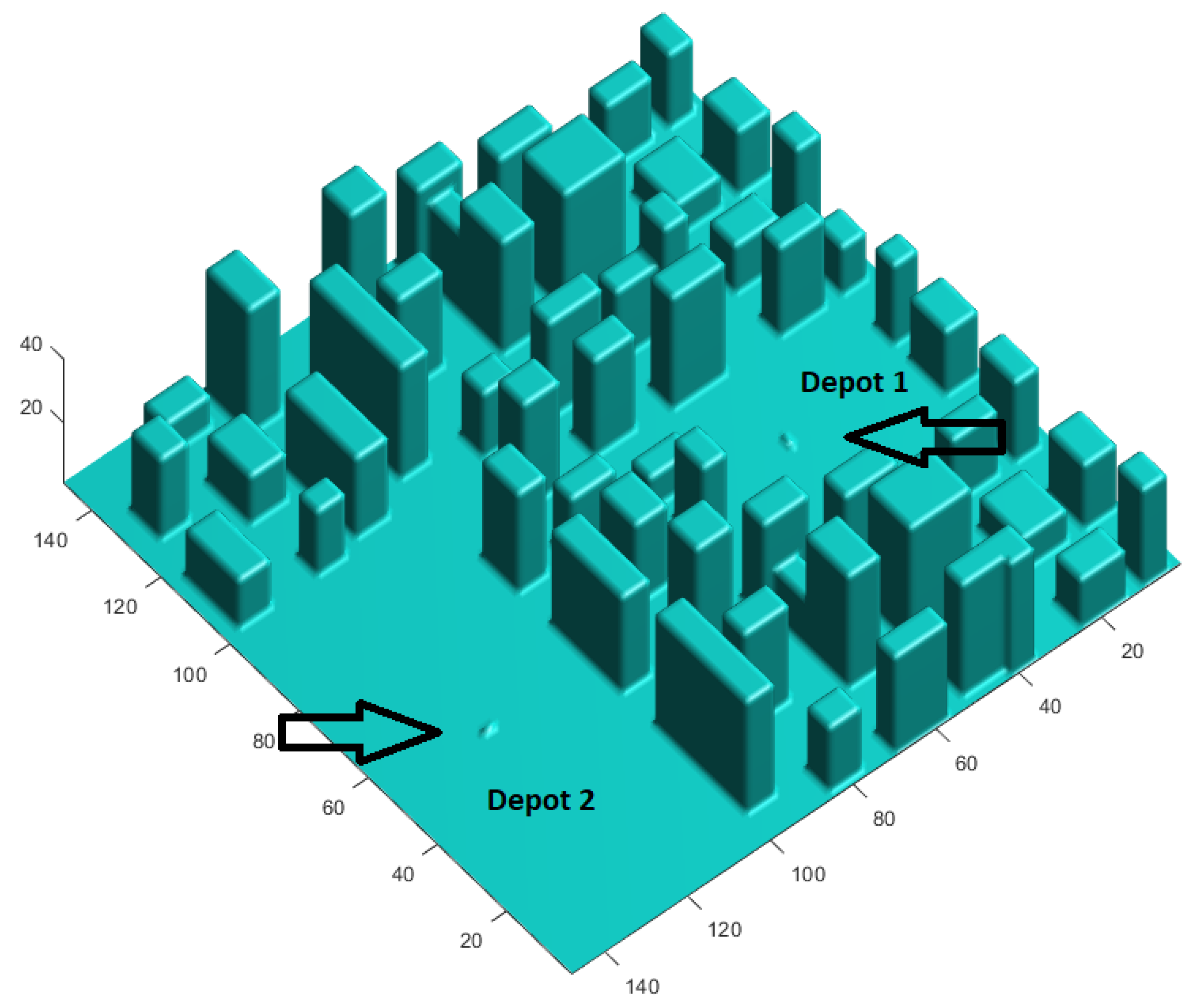
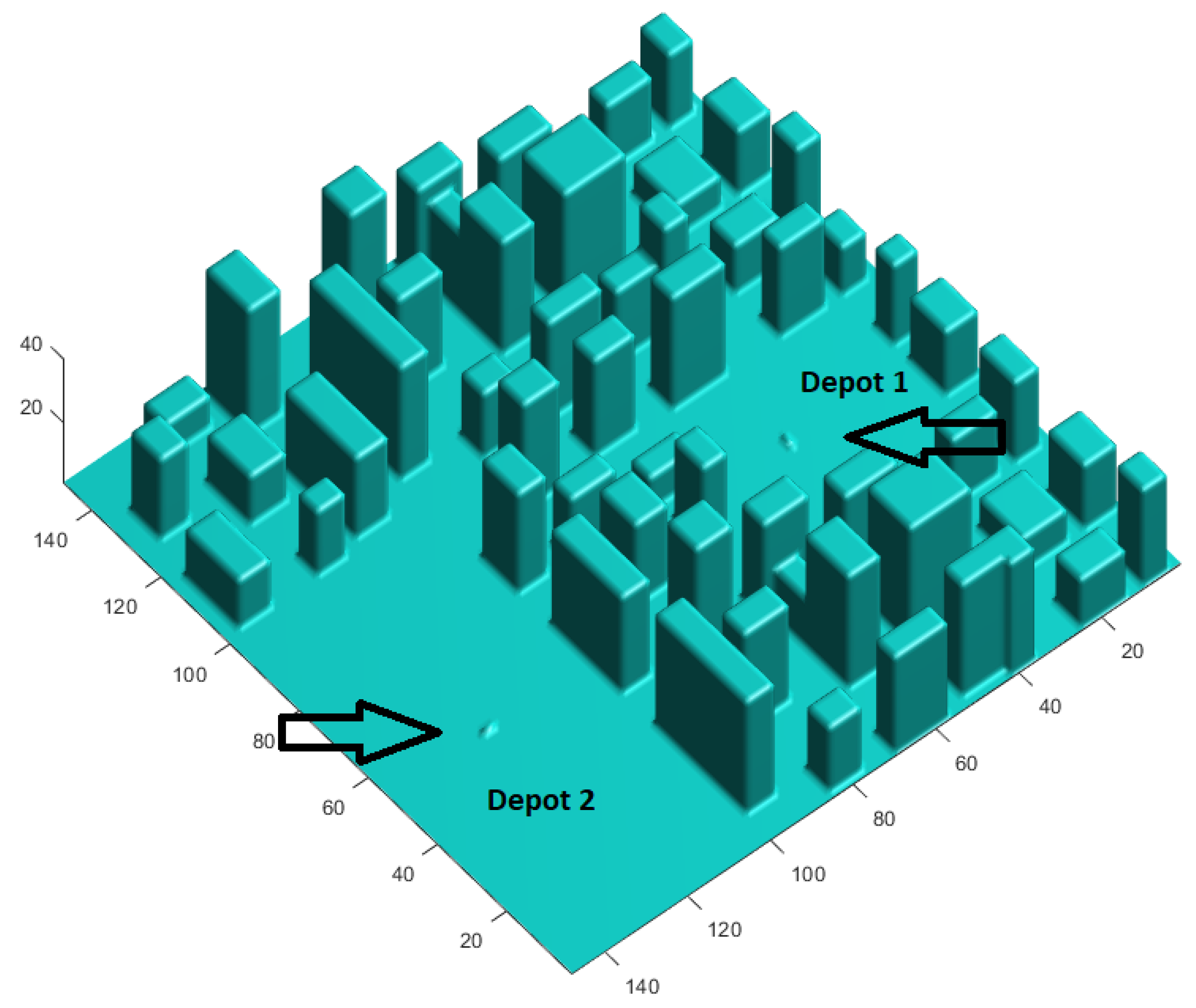
2.1. Representation and Description of the Environment
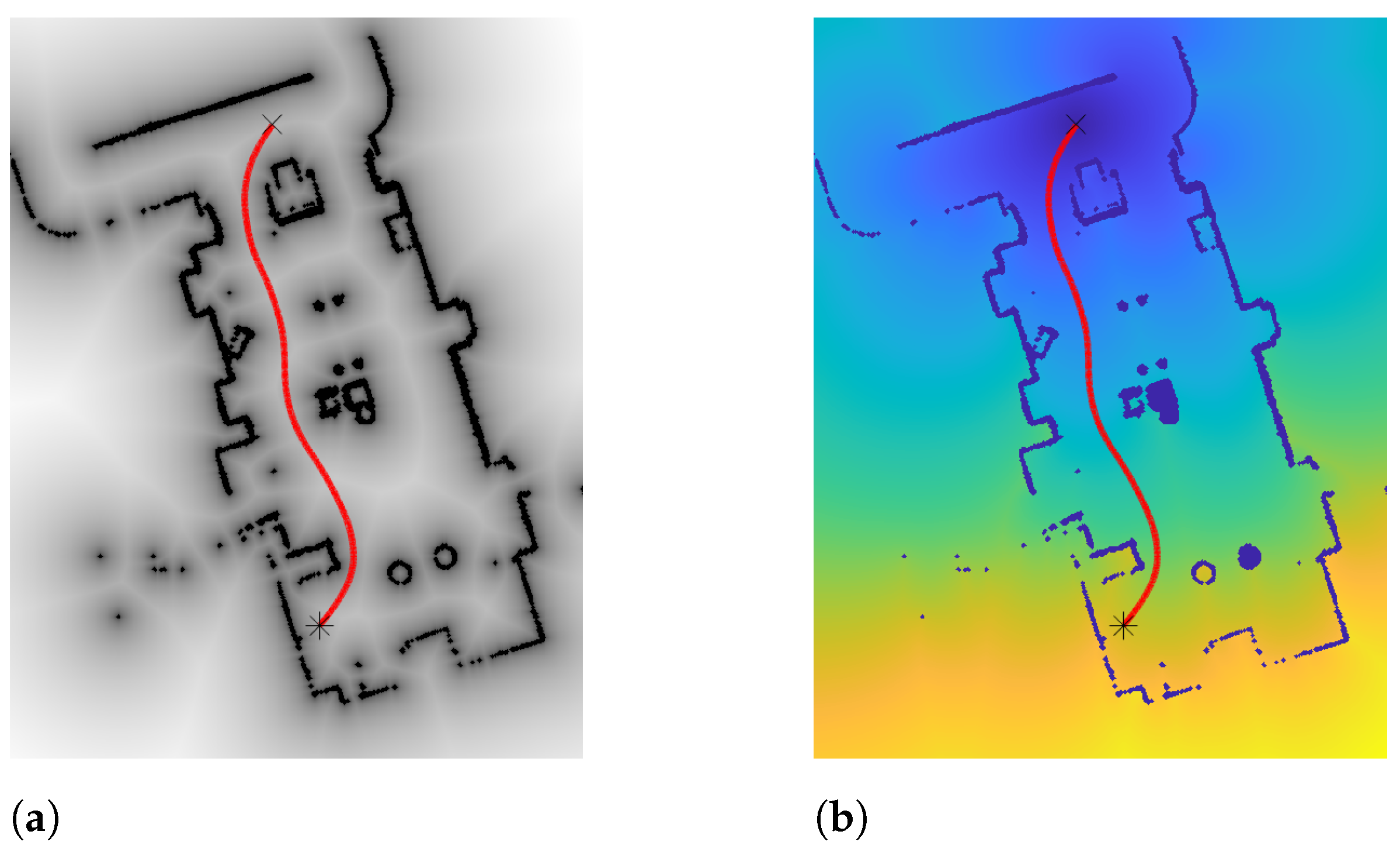
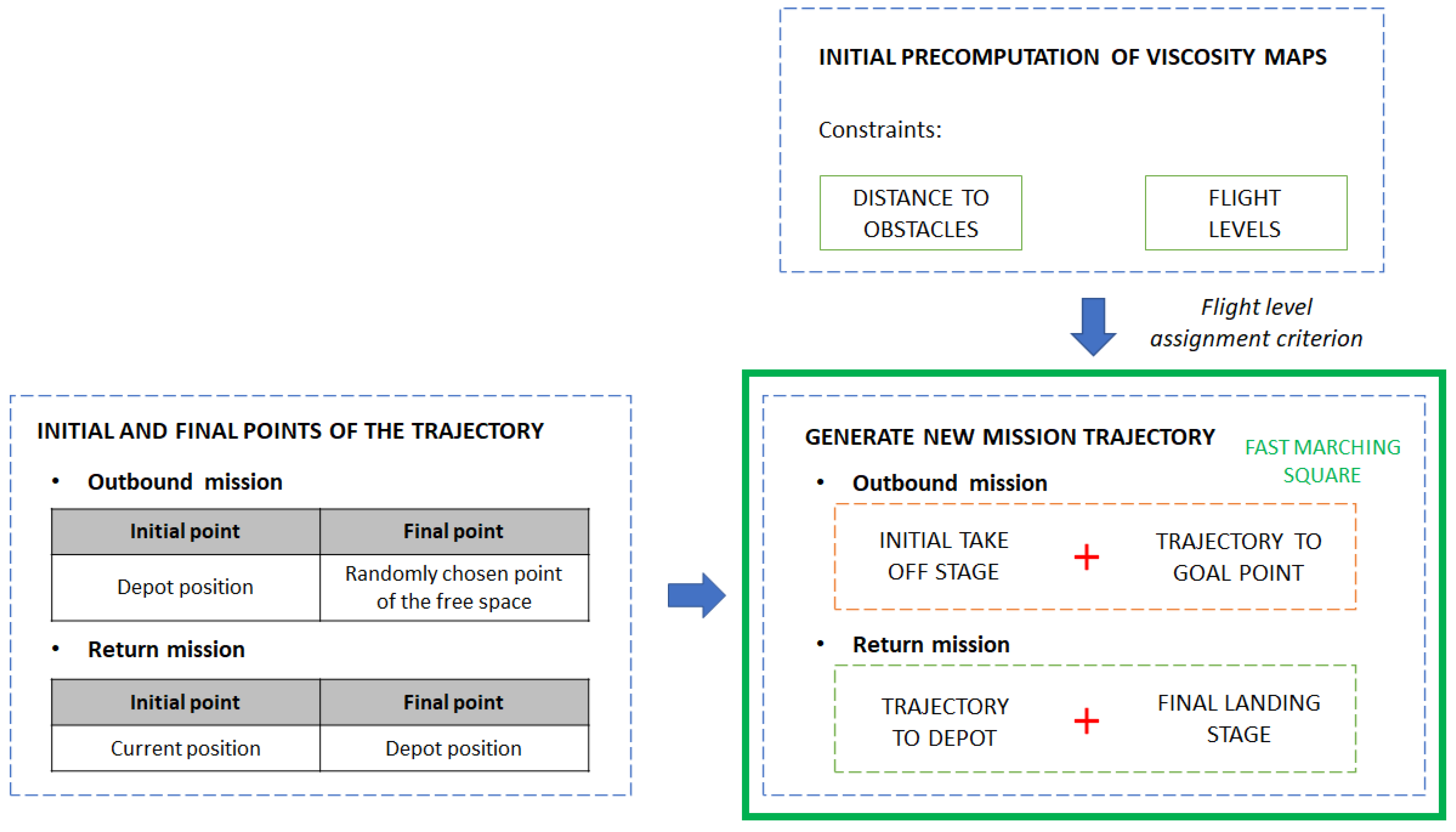
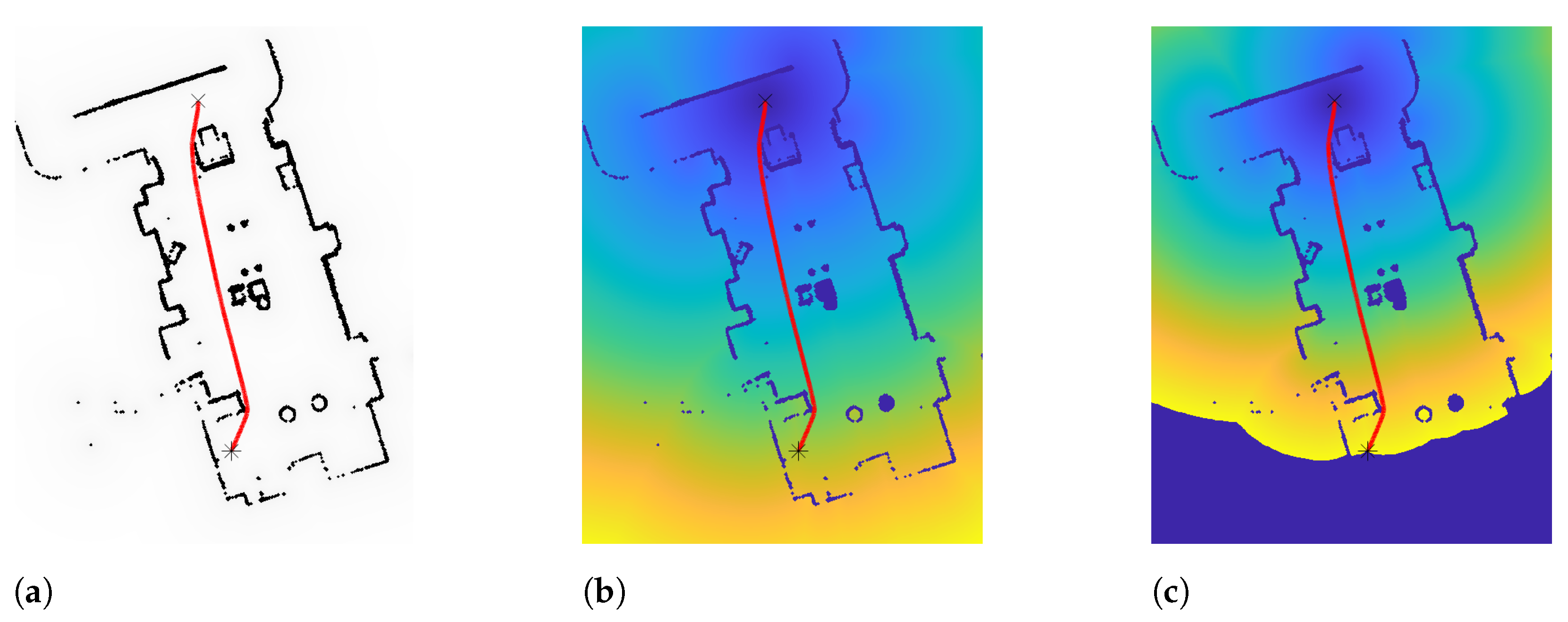
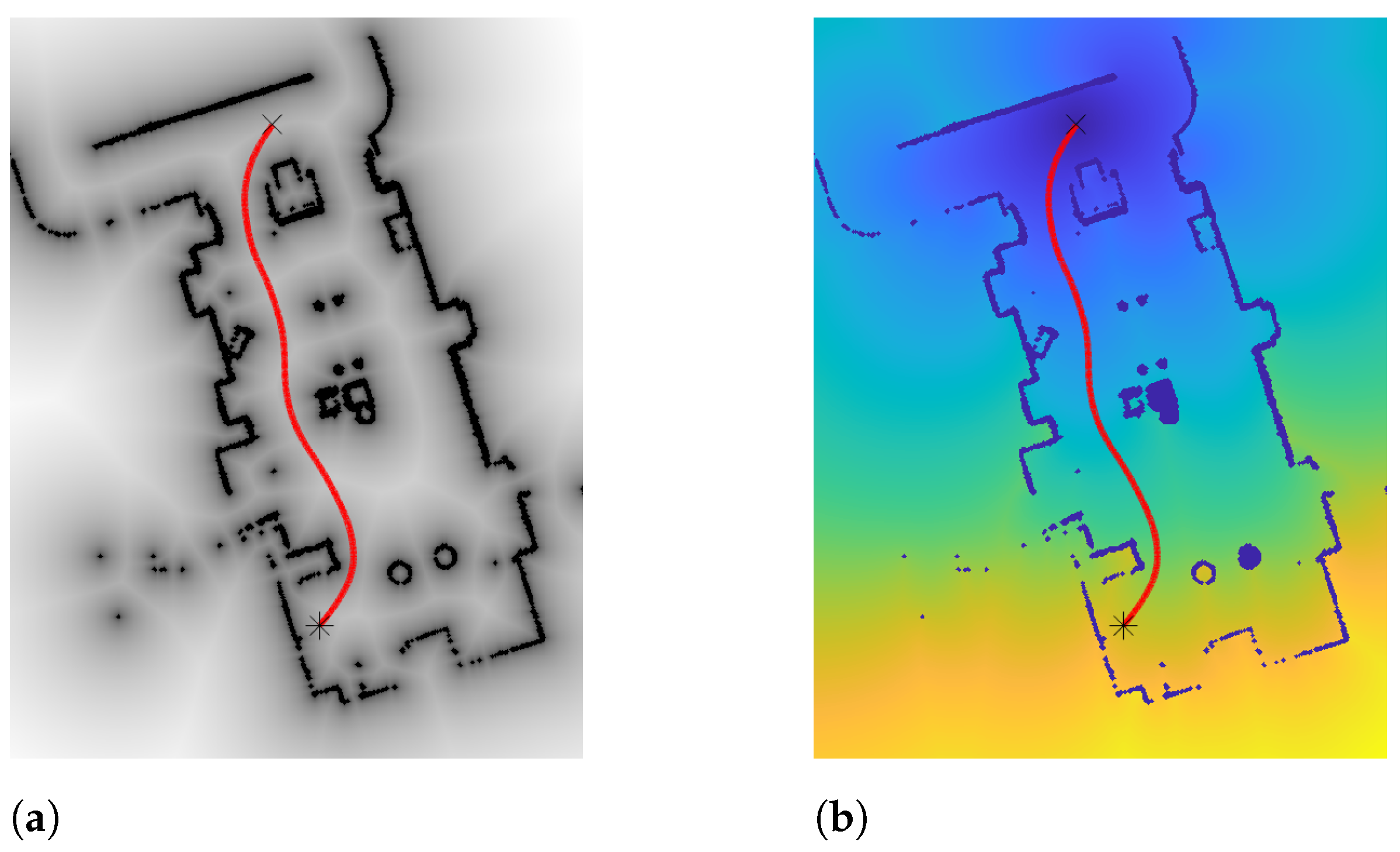
2.2. Trajectory Planning Using Fast Marching Square
- It is a complete planning algorithm, i.e., it always finds the solution to the problem, if it exists.
- It completely eliminates the problem of local minima. A local minimum would imply that such point would be assigned a lower than neighboring points closer to the wave source, which is impossible considering that .
- The trajectory obtained between two points in space is the optimal in both time and distance. In the case of FM2, a smooth and safe trajectory is obtained, which remains sufficiently optimal.
- It is an algorithm of linear complexity order O(n), where n represents the total number of points of the considered mesh, which makes it computationally faster than other planning algorithms whose complexity order is, for instance, exponential (e.g., the A* algorithm) or asymptotic (e.g., the RRT algorithm).
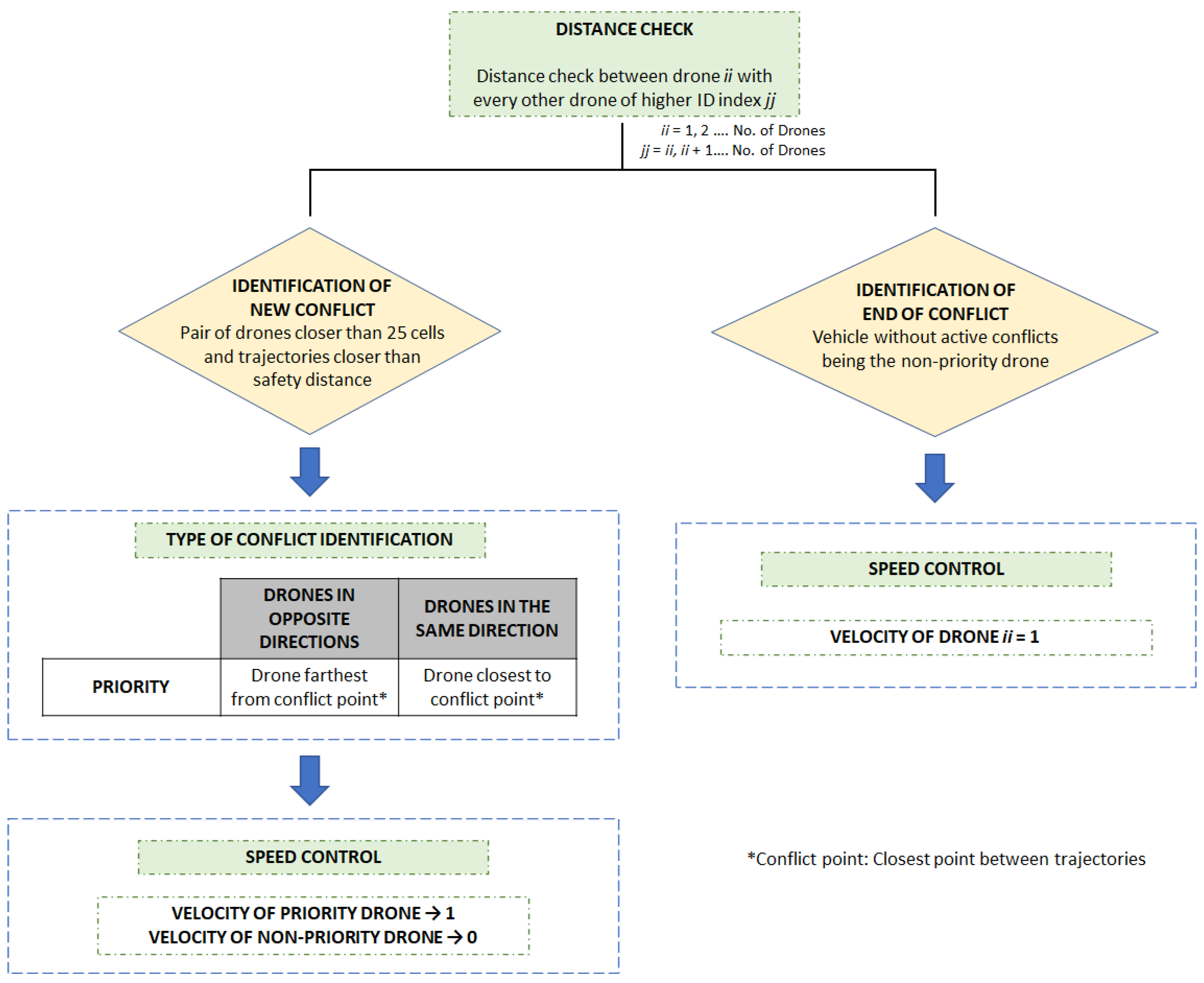
2.3. Collision Risk Management by Vehicle Velocity Control
- Which vehicle is found flying behind the other, in the case both are flying in the same direction.
- Which vehicle is found flying nearer to the closest point between their trajectories, in the case both are flying in opposite directions.
| Algorithm 1 Routine of the complete developed strategy |
|
| Algorithm 2 Trajectory planning using Fast Marching Square |
|
| Algorithm 3 Distance check function to ensure a safe takeoff |
|
| Algorithm 4 Conflict management stage function |
|
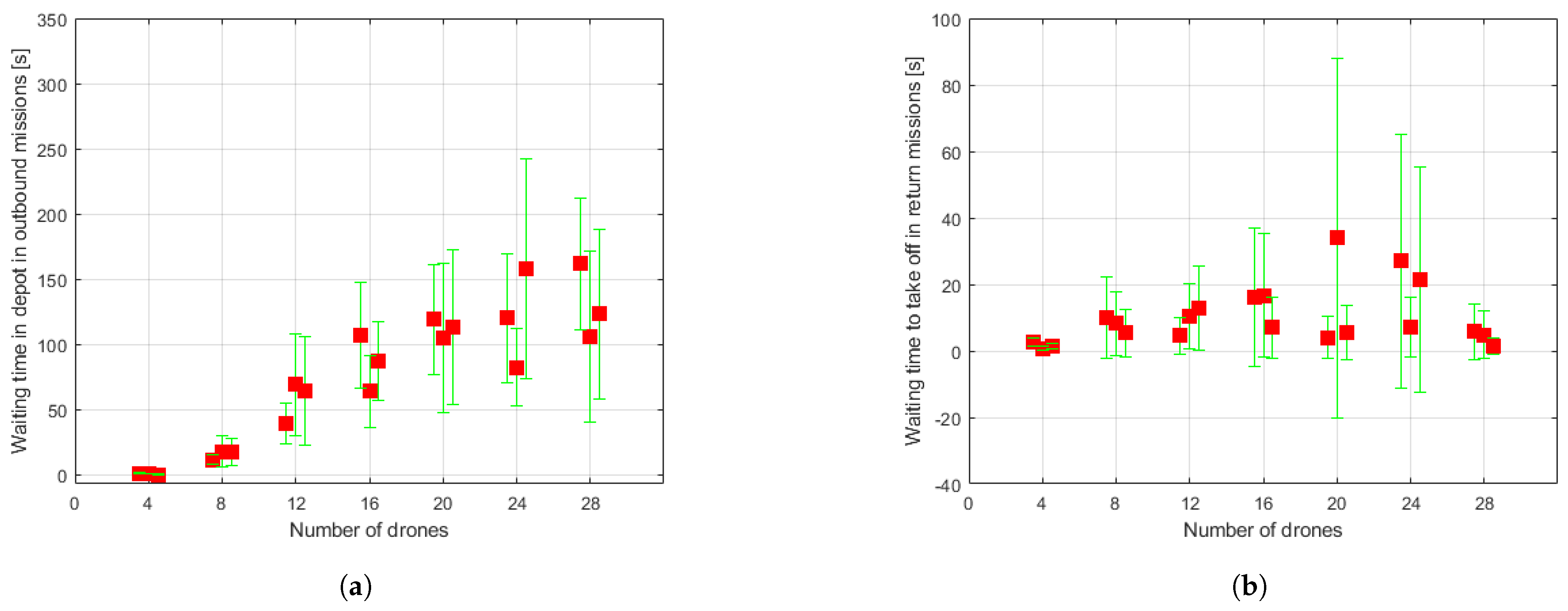
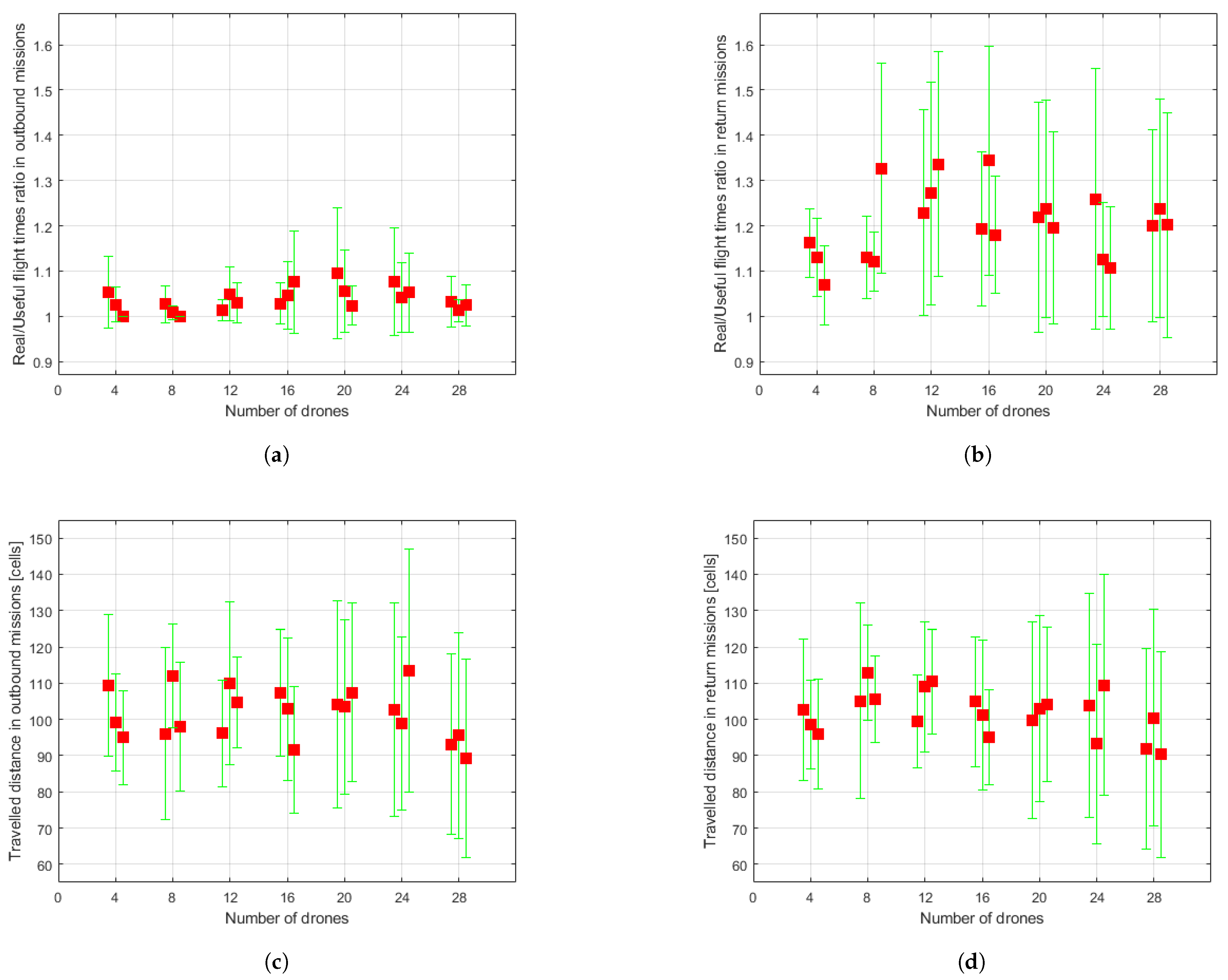
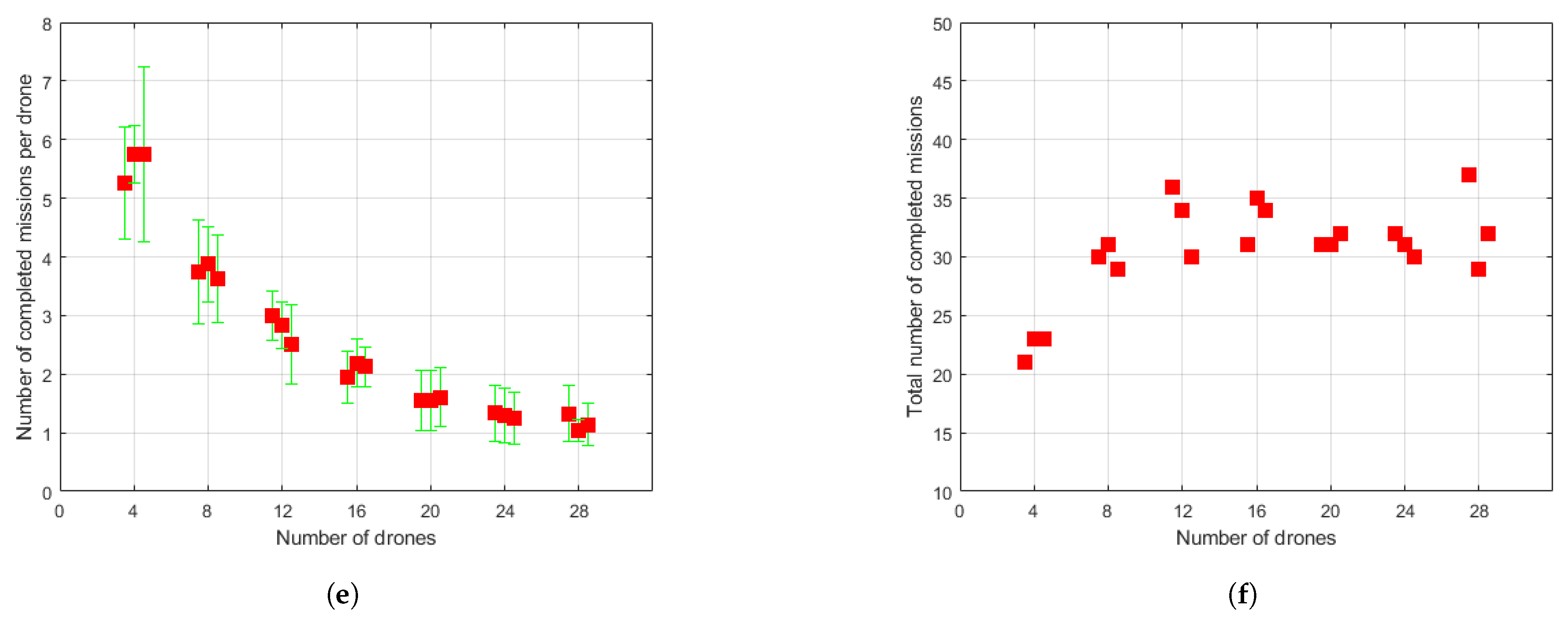
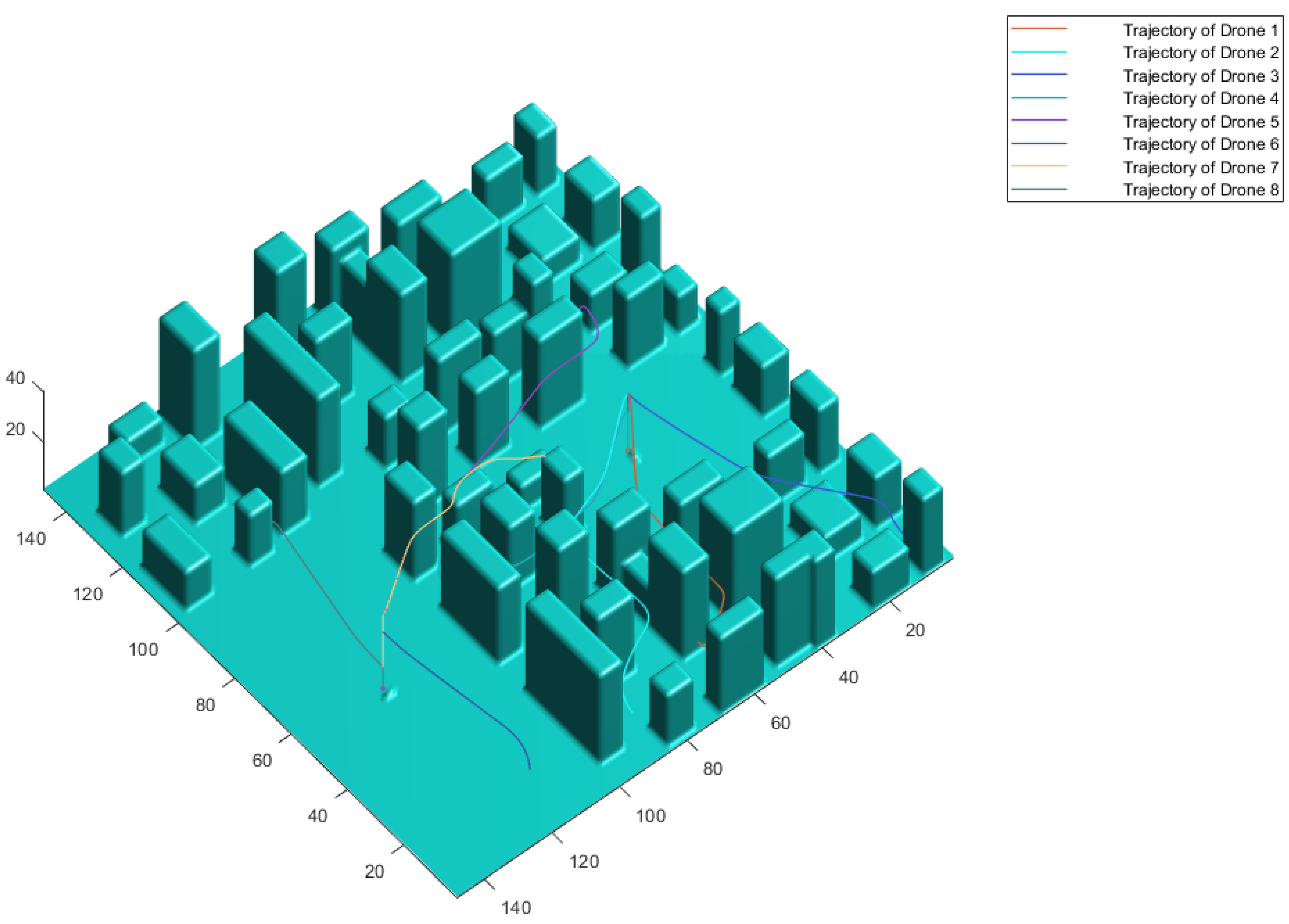
3. Results
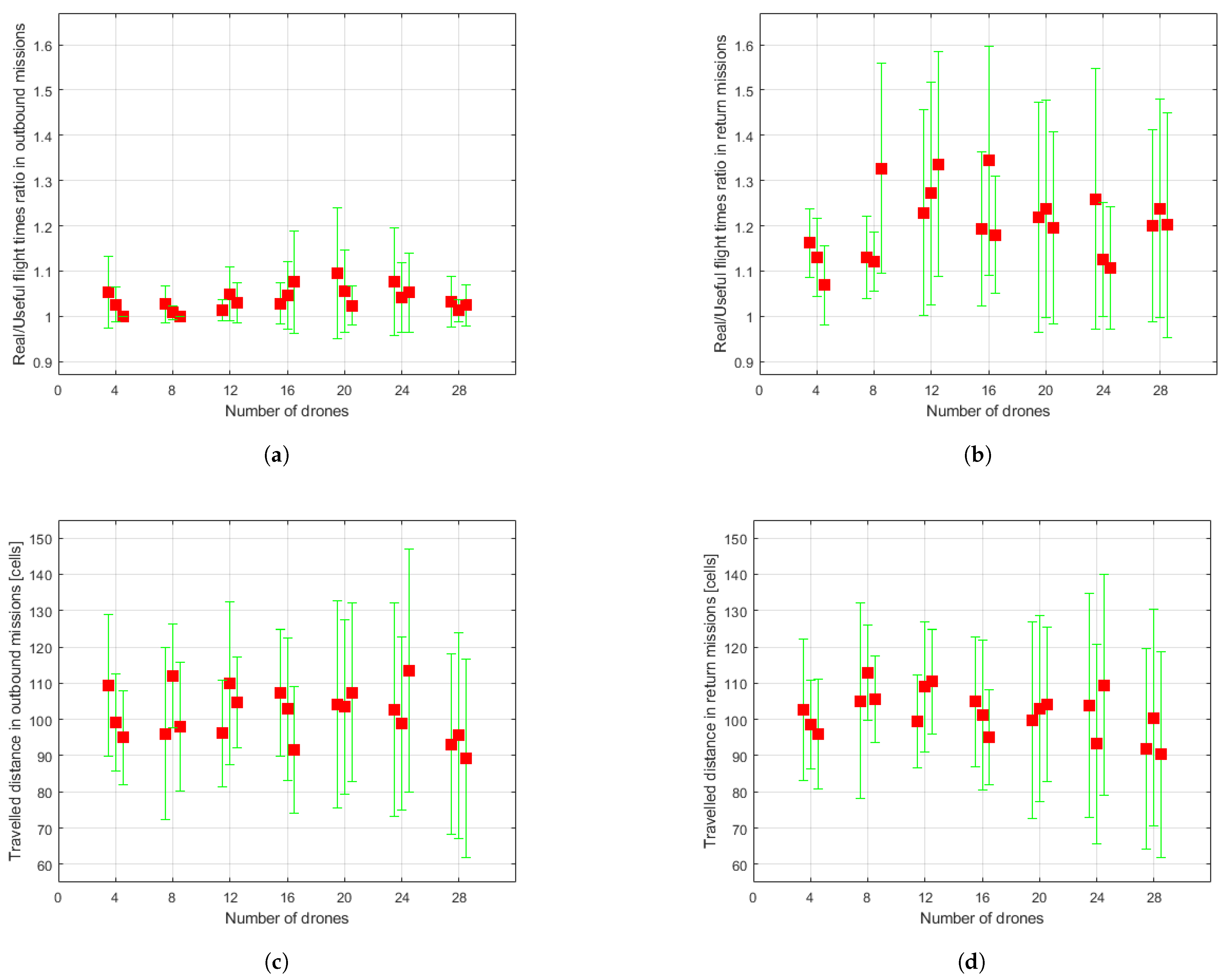
- For each mission completed by each vehicle, the length of the trajectories corresponding to the outbound and return missions is registered.
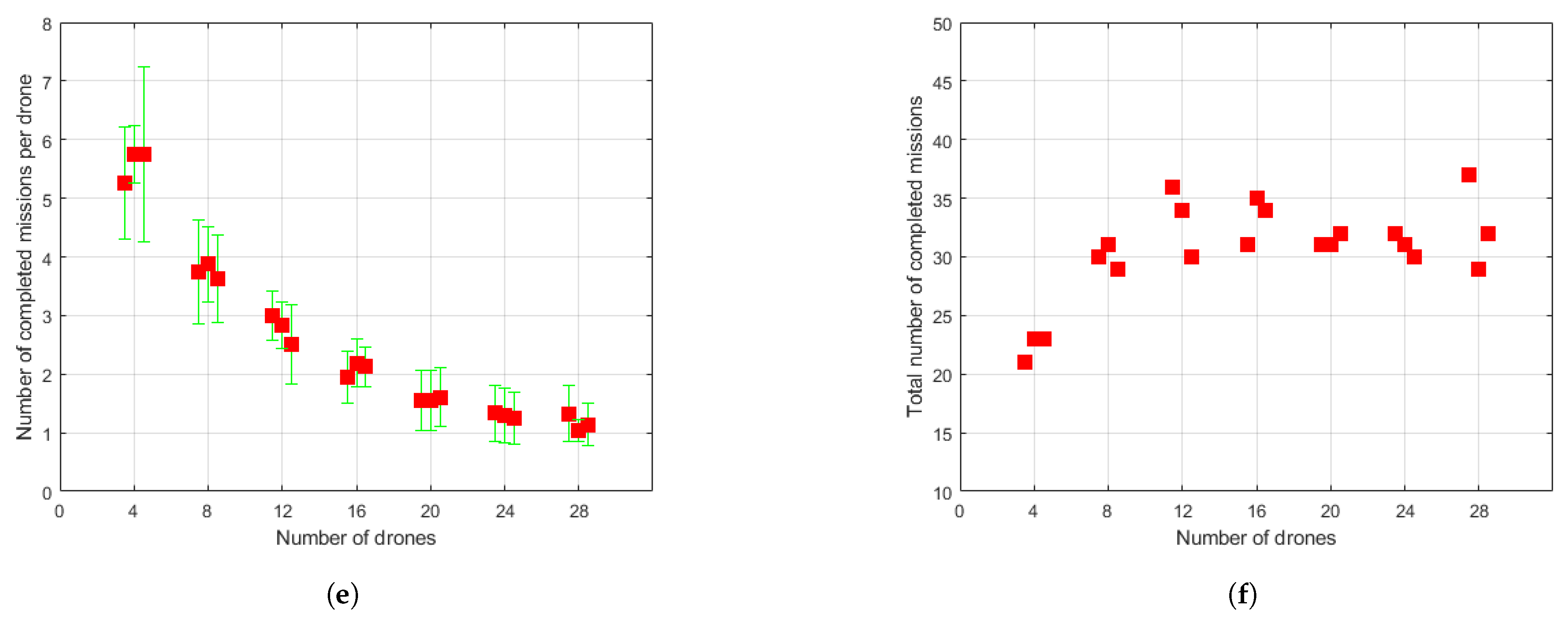
- The number of totally completed missions performed by the set of drones is recorded.
- In addition to the previous collected measure, the number of missions completed by each vehicle is recorded.
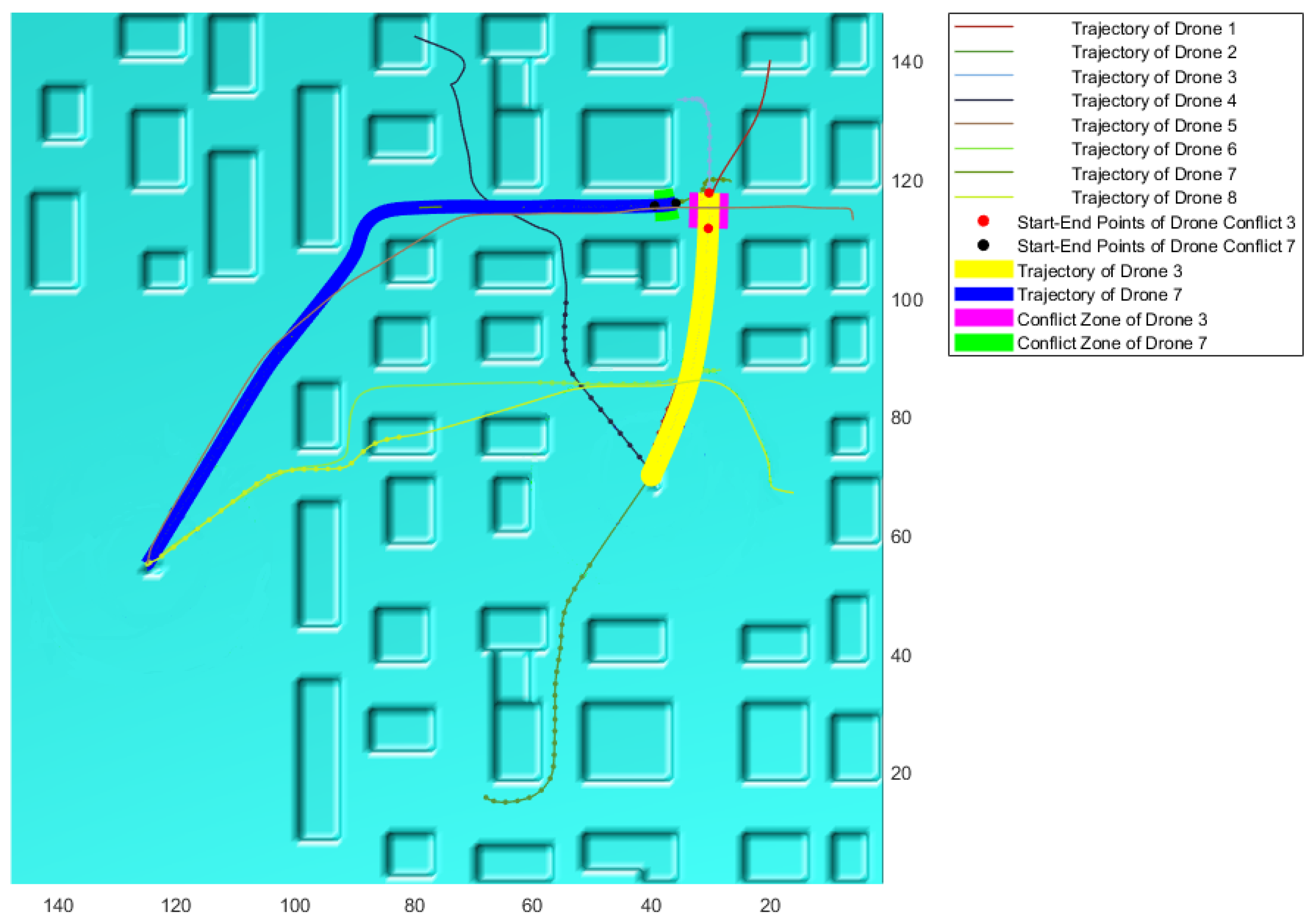
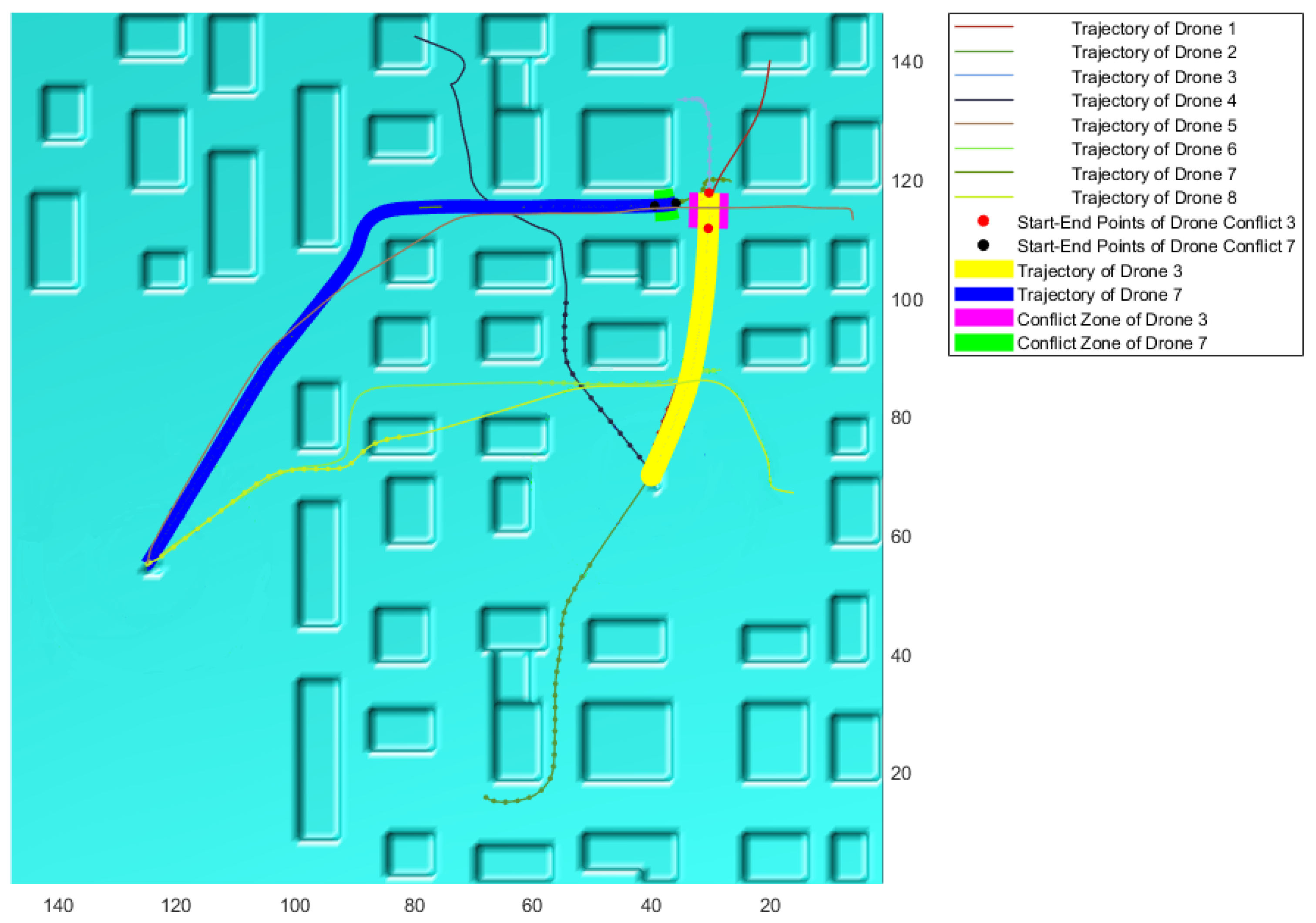
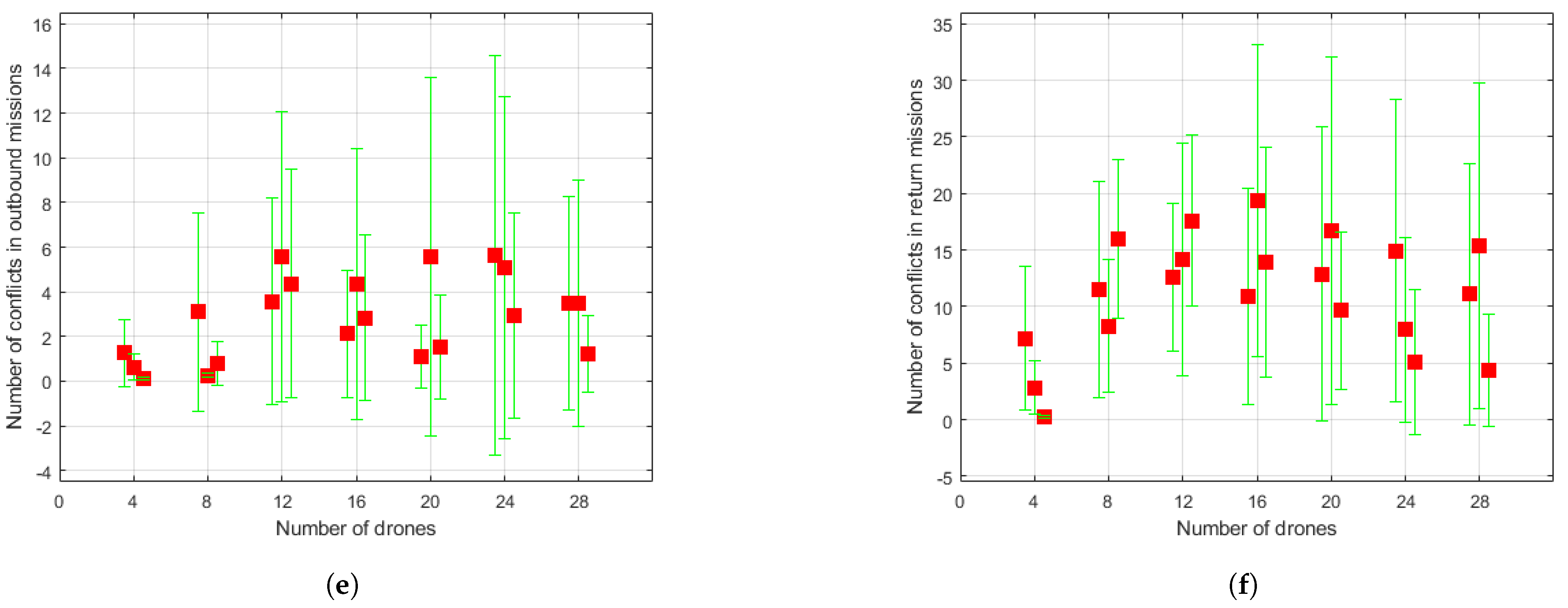
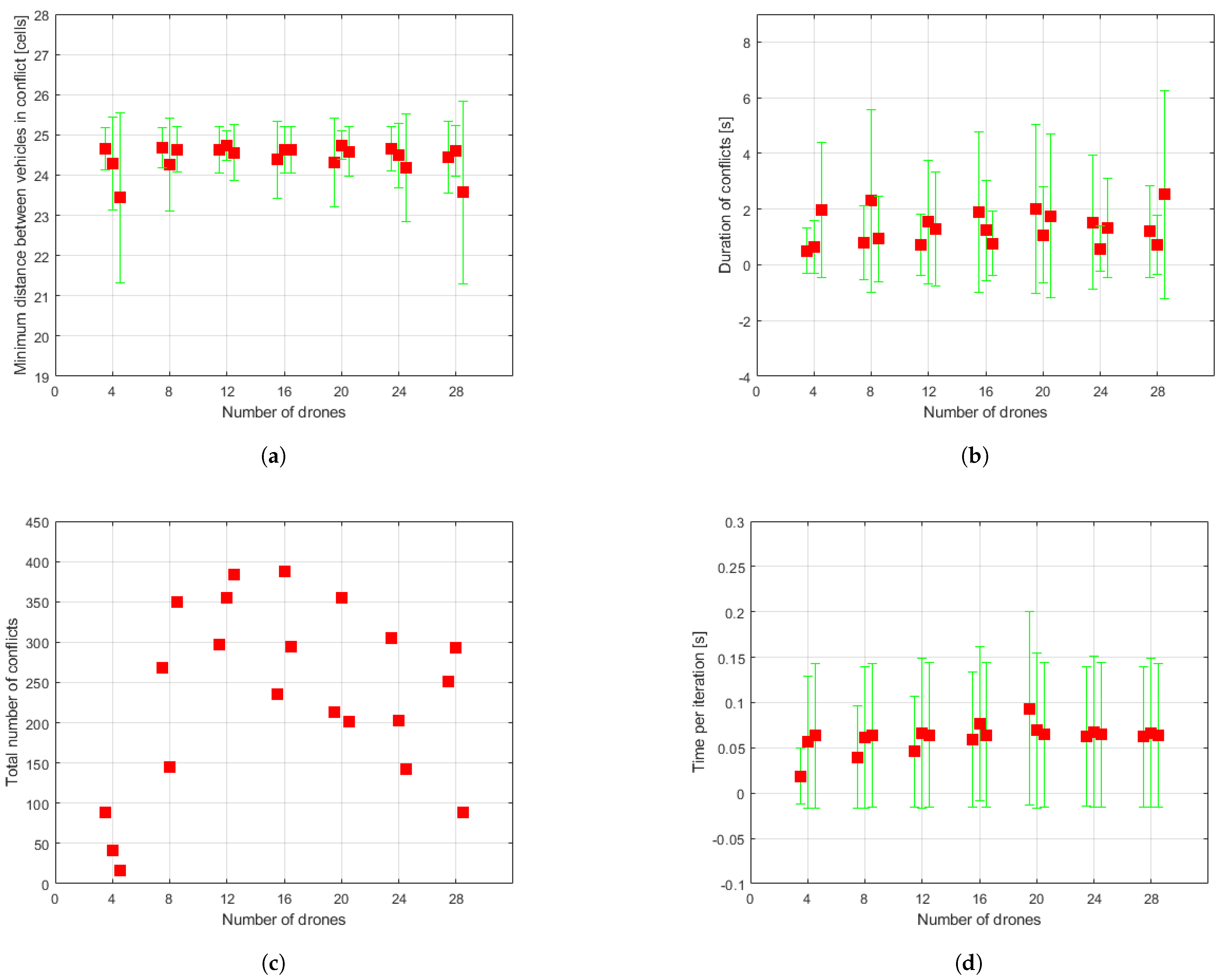
- List of conflicts. For each conflict that has occurred throughout the whole execution, a series of measures is analyzed: pair of drones that have participated in the conflict, duration of the conflict and smallest distance given between both vehicles (both in the xy plane and in the z-axis).
- Number of conflicts occurred for the set of drones.
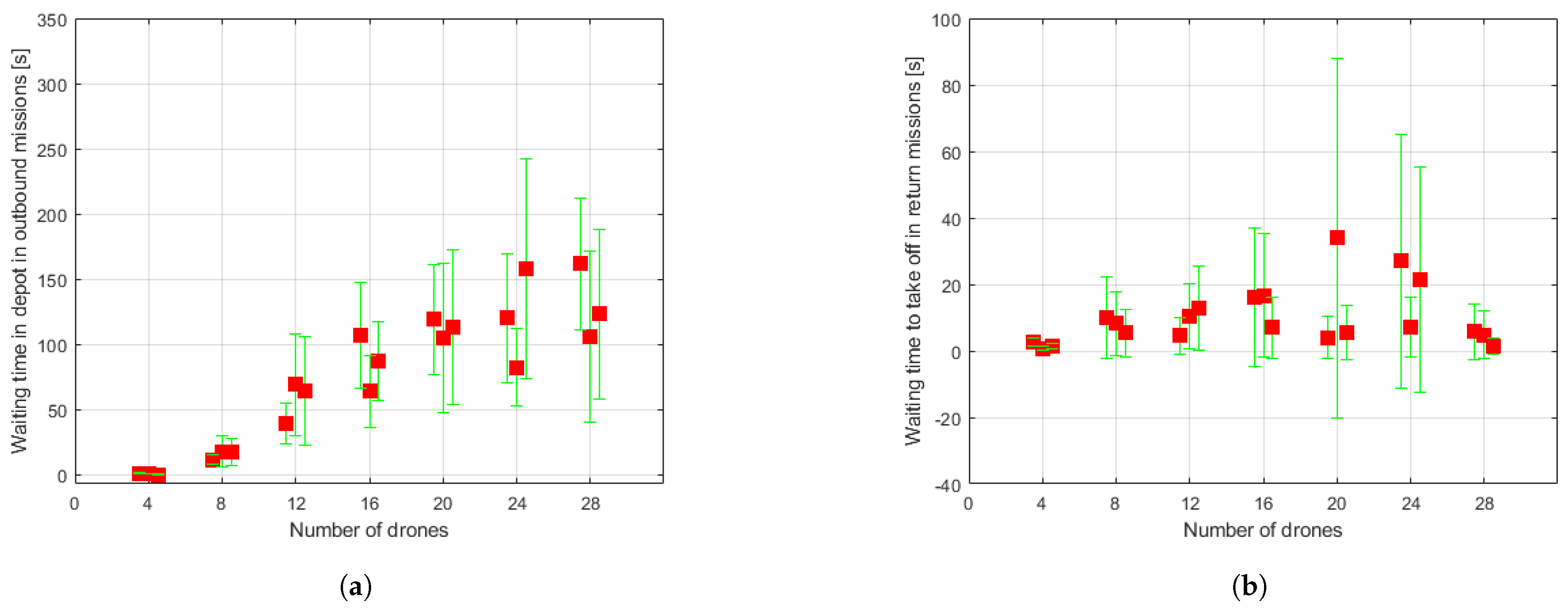
- Characteristic mission time measures. For each mission completed by each vehicle individually, eight measurements are recorded: time spent waiting in depot to start outbound mission, time spent stopped in flight due to conflicts in outbound mission, total duration of outbound mission, number of conflicts encountered in outbound mission, time spent waiting at the goal point to begin return mission, time spent stopped in flight due to conflicts in return mission, duration of return mission and number of conflicts in return mission.
- Other time measures. The time required for each iteration run is also recorded. The time spent in the routine responsible for moving the drones and updating their trajectories is also taken into account.The aim of these measurements is to calculate the real computation time of the algorithm iterative loop, discarding as much as possible the time spent in calculation processes that belong to the simulation itself and are not an essential part of the path planning and collision avoidance stages.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Scherer, J.; Yahyanejad, S.; Hayat, S.; Yanmaz, E.; Vukadinovic, V.; Andre, T.; Bettstetter, C.; Rinner, B.; Khan, A.; Hellwagner, H. An autonomous multi-UAV system for search and rescue. In DroNet 2015, Proceedings of the 2015 Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Florence, Italy, 18 May 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 33–38. [Google Scholar] [CrossRef]
- Alotaibi, E.T.; Alqefari, S.S.; Koubaa, A. LSAR: Multi-UAV Collaboration for Search and Rescue Missions. IEEE Access 2019, 7, 55817–55832. [Google Scholar] [CrossRef]
- Phung, M.D.; Dinh, T.H.; Ha, Q.P. System architecture for real-time surface inspection using multiple UAVs. IEEE Syst. J. 2019, 14, 2925–2936. [Google Scholar]
- Shakeri, R.; Al-Garadi, M.A.; Badawy, A.; Mohamed, A.; Khattab, T.; Al-Ali, A.K.; Harras, K.A.; Guizani, M. Design challenges of multi-UAV systems in cyber-physical applications: A comprehensive survey and future directions. IEEE Commun. Surv. Tutor. 2019, 21, 3340–3385. [Google Scholar] [CrossRef] [Green Version]
- Scherer, J.; Rinner, B. Persistent multi-UAV surveillance with energy and communication constraints. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 1225–1230. [Google Scholar]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Wijerathna, C.M.; Jayakody, D.N.K.; Wang, H.C. Communication and Networking Technologies for UAVs: A Survey. J. Netw. Comput. Appl. 2020, 102739. [Google Scholar] [CrossRef]
- Avellar, G.S.; Pereira, G.A.; Pimenta, L.C.; Iscold, P. Multi-UAV routing for area coverage and remote sensing with minimum time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [Green Version]
- Saint-Sevin, M.; Bégoc, V.; Briot, S.; Chriette, A.; Fantoni, I. Design and Optimization of a Multi-drone Robot for Grasping and Manipulation of Large Size Objects. CISM Int. Cent. Mech. Sci. Courses Lect. 2019, 584, 458–465. [Google Scholar] [CrossRef] [Green Version]
- Sawalmeh, A.H.; Shamsiah Othman, N. An Overview of Collision Avoidance Approaches and Network Architecture of Unmanned Aerial Vehicles (UAVs). Int. J. Eng. Technol. 2018, 7, 924. [Google Scholar] [CrossRef] [Green Version]
- Bertuccelli, L.F.; Choi, H.L.; Cho, P.; How, J.P. Real-time multi-UAV task assignment in dynamic and uncertain environments. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Chicado, IL, USA, 10–13 August 2009; pp. 1–16. [Google Scholar] [CrossRef] [Green Version]
- Ferrera, E.; Alcántara, A.; Capitán, J.; Casta no, A.R.; Marrón, P.J.; Ollero, A. Decentralized 3D Collision Avoidance for Multiple UAVs in Outdoor Environments. Sensors 2018, 18, 4101. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Teo, R.S.H.; Tan, K.K. Collision avoidance of multi unmanned aerial vehicles: A review. Annu. Rev. Control 2019, 48, 147–164. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Path planning using 3D dubins curve for unmanned aerial vehicles. In Proceedings of the IEEE 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 296–304. [Google Scholar]
- Yang, K.; Sukkarieh, S. 3D smooth path planning for a UAV in cluttered natural environments. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Nice, France, 22–26 September 2008; pp. 794–800. [Google Scholar] [CrossRef]
- Mao-Hui, F.; Jun, X. Research on trajectory planning algorithm of unmanned aerial vehicle based on improved A* algorithm. In Proceedings of the 2017 International Conference on Computer Systems, Electronics and Control, ICCSEC 2017, Dalian, China, 25–27 December 2018; pp. 1348–1352. [Google Scholar] [CrossRef]
- Yan, F.; Liu, Y.S.; Xiao, J.Z. Path planning in complex 3D environments using a probabilistic roadmap method. Int. J. Autom. Comput. 2013, 10, 525–533. [Google Scholar] [CrossRef]
- Shanmugavel, M.; Tsourdos, A.; White, B.; Zbikowski, R. Co-operative path planning of multiple UAVs using Dubins paths with clothoid arcs. Control Eng. Pract. 2010, 18, 1084–1092. [Google Scholar] [CrossRef]
- Borrelli, F.; Subramanian, D.; Raghunathan, A.U.; Biegler, L.T. MILP and NLP techniques for centralized trajectory planning of multiple unmanned air vehicles. Proc. Am. Control Conf. 2006, 2006, 5763–5768. [Google Scholar] [CrossRef]
- Galvez, R.L.; Dadios, E.P.; Bandala, A.A. Path planning for quadrotor UAV using genetic algorithm. In Proceedings of the IEEE 2014 International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Palawan, Philippines, 12–16 November 2014; pp. 1–6. [Google Scholar]
- González, V.; Monje, C.A.; Moreno, L.; Balaguer, C. Fast Marching Square Method for UAVs Mission Planning with consideration of Dubins Model Constraints. IFAC-PapersOnLine 2016, 49, 164–169. [Google Scholar] [CrossRef]
- González, V.; Monje, C.A.; Moreno, L.; Balaguer, C. UAVs mission planning with flight level constraint using Fast Marching Square Method. Robot. Auton. Syst. 2017, 94, 162–171. [Google Scholar] [CrossRef]
- Berdonosov, V.D.; Zivotova, A.A.; Htet Naing, Z.; Zhuravlev, D.O. Speed Approach for UAV Collision Avoidance. J. Phys. Conf. Ser. 2018, 1015. [Google Scholar] [CrossRef]
- Wan, Y.; Tang, J.; Lao, S. Distributed conflict-detection and resolution algorithm for UAV swarms based on consensus algorithm and strategy coordination. IEEE Access 2019, 7, 100552–100566. [Google Scholar] [CrossRef]
- Chen, H.; Jilkov, V.P.; Li, X.R. On threshold optimization for aircraft conflict detection. In Proceedings of the 2015 18th International Conference on Information Fusion, Fusion 2015, Washington, DC, USA, 6–9 July 2015; pp. 1198–1204. [Google Scholar]
- Jenie, Y.I.; van Kampen, E.J.; Remes, B. Cooperative Autonomous Collision Avoidance System for Unmanned Aerial Vehicle. Adv. Aerosp. Guid. Navig. Control. 2013, 387–405. [Google Scholar] [CrossRef]
- Bai, H.; Hsu, D.; Kochenderfer, M.J.; Lee, W.S. Unmanned aircraft collision avoidance using continuous-state POMDPs. Robot. Sci. Syst. 2012, 7, 1–8. [Google Scholar] [CrossRef]
- Douthwaite, J.A.; De Freitas, A.; Mihaylova, L.S. An Interval Approach to Multiple Unmanned Aerial Vehicle Collision Avoidance. In Proceedings of the 2017 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 10–12 October 2017. [Google Scholar] [CrossRef]
- Bassolillo, S.R.; D’Amato, E.; Notaro, I.; Blasi, L.; Mattei, M. Decentralized mesh-based model predictive control for swarms of UAVs. Sensors 2020, 20, 4324. [Google Scholar] [CrossRef] [PubMed]
- Tan, C.Y.; Huang, S.; Tan, K.K.; Teo, R.S.H. Three Dimensional Collision Avoidance for Multi Unmanned Aerial Vehicles Using Velocity Obstacle. J. Intell. Robot. Syst. Theory Appl. 2020, 97, 227–248. [Google Scholar] [CrossRef]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Beard, R.; Saunders, J. Reactive vision based obstacle avoidance with camera field of view constraints. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 7250. [Google Scholar]
- McFadyen, A.; Durand-Petiteville, A.; Mejias, L. Decision strategies for automated visual collision avoidance. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems, ICUAS 2014—Conference Proceedings, Orlando, FL, USA, 27–30 May 2014; pp. 715–725. [Google Scholar] [CrossRef]
- Yang, X.; Alvarez, L.M.; Bruggemann, T. A 3D collision avoidance strategy for UAVs in a non-cooperative environment. J. Intell. Robot. Syst. Theory Appl. 2013, 70, 315–327. [Google Scholar] [CrossRef] [Green Version]
- Byrne, J.; Cosgrove, M.; Mehra, R. Real Time Stereo Based Obstacle Detection for UAV Threat Avoidance. 2003. Available online: https://www.jeffreybyrne.com/ (accessed on 20 January 2021).
- Mori, T.; Scherer, S. First results in detecting and avoiding frontal obstacles from a monocular camera for micro unmanned aerial vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1750–1757. [Google Scholar] [CrossRef] [Green Version]
- El Khaili, M. Visibility Graph For Path Planning In The Presence Of Moving Obstacles. Eng. Sci. Technol. Int. J. (ESTIJ) 2014, 4, 2250–3498. [Google Scholar]
- Esposito, J.F. Real-time obstacle and collision avoidance system for fixed wing unmanned aerial systems. ProQuest Diss. Theses 2013, 3568198, 181. [Google Scholar]
- Du, Y.; Zhang, X.; Nie, Z. A Real-Time Collision Avoidance Strategy in Dynamic Airspace Based on Dynamic Artificial Potential Field Algorithm. IEEE Access 2019, 7, 169469–169479. [Google Scholar] [CrossRef]
- Tang, J.; Sun, J.; Lu, C.; Lao, S. Optimized artificial potential field algorithm to multi-unmanned aerial vehicle coordinated trajectory planning and collision avoidance in three-dimensional environment. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 6032–6043. [Google Scholar] [CrossRef]
- Alejo, D.; Conde, R.; Cobano, J.; Ollero, A. Multi-UAV collision avoidance with separation assurance under uncertainties. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Changchun, China, 9–12 August 2009; pp. 1–6. [Google Scholar]
- Li, Y.; Du, W.; Yang, P.; Wu, T.; Zhang, J.; Wu, D.; Perc, M. A satisficing conflict resolution approach for multiple UAVs. IEEE Internet Things J. 2018, 6, 1866–1878. [Google Scholar] [CrossRef]
- Boivin, E.; Desbiens, A.; Gagnon, E. UAV collision avoidance using cooperative predictive control. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Las Vegas, NV, USA, 31 March–3 April 2008; pp. 682–688. [Google Scholar]
- Luo, C.; McClean, S.I.; Parr, G.; Teacy, L.; De Nardi, R. UAV position estimation and collision avoidance using the extended Kalman filter. IEEE Trans. Veh. Technol. 2013, 62, 2749–2762. [Google Scholar] [CrossRef]
- Masiero, A.; Fissore, F.; Guarnieri, A.; Pirotti, F.; Vettore, A. UAV positioning and collision avoidance based on RSS measurements. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 219. [Google Scholar] [CrossRef] [Green Version]
- Raimundo, A.S.L. Autonomous Obstacle Collision Avoidance System for Uavs in Rescue Operations. Ph.D. Thesis, Instituto Universitário de Lisboa, Lisbon, Portugal, 2016. [Google Scholar]
- Baca, T.; Hert, D.; Loianno, G.; Saska, M.; Kumar, V. Model predictive trajectory tracking and collision avoidance for reliable outdoor deployment of unmanned aerial vehicles. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6753–6760. [Google Scholar]
- Spurnỳ, V.; Báča, T.; Saska, M.; Pěnička, R.; Krajník, T.; Thomas, J.; Thakur, D.; Loianno, G.; Kumar, V. Cooperative autonomous search, grasping, and delivering in a treasure hunt scenario by a team of unmanned aerial vehicles. J. Field Robot. 2019, 36, 125–148. [Google Scholar] [CrossRef] [Green Version]
- Amazon. Amazon Prime Air. Available online: https://amzn.to/2JfoQMB (accessed on 29 October 2020).
- Sethian, J.A. A fast marching level set method for monotonically advancing fronts. Proc. Natl. Acad. Sci. USA 1996, 93, 1591–1595. [Google Scholar] [CrossRef] [Green Version]
- Tan, G.; Zou, J.; Zhuang, J.; Wan, L.; Sun, H.; Sun, Z. Fast marching square method based intelligent navigation of the unmanned surface vehicle swarm in restricted waters. Appl. Ocean Res. 2020, 95, 102018. [Google Scholar] [CrossRef]
- Mrudul, K.; Mandava, R.K.; Vundavilli, P.R. An Efficient Path Planning Algorithm for Biped Robot using Fast Marching Method. Procedia Comput. Sci. 2018, 133, 116–123. [Google Scholar] [CrossRef]
- Liu, Y.; Song, R.; Bucknall, R.; Zhang, X. Intelligent multi-task allocation and planning for multiple unmanned surface vehicles (USVs) using self-organising maps and fast marching method. Inf. Sci. 2019, 496, 180–197. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R. Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment. Ocean Eng. 2015, 97, 126–144. [Google Scholar] [CrossRef]
- Yan, X.P.; Wang, S.W.; Ma, F.; Liu, Y.C.; Wang, J. A novel path planning approach for smart cargo ships based on anisotropic fast marching. Expert Syst. Appl. 2020, 159, 113558. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Papadimitriou, E.; Mou, J.; van Gelder, P. Global path planning for autonomous ship: A hybrid approach of Fast Marching Square and velocity obstacles methods. Ocean Eng. 2020, 214, 107793. [Google Scholar] [CrossRef]
- Gómez, J.V.; Lumbier, A.; Garrido, S.; Moreno, L. Planning robot formations with fast marching square including uncertainty conditions. Robot. Auton. Syst. 2013, 61, 137–152. [Google Scholar] [CrossRef] [Green Version]
- Valero-Gomez, A.; Gomez, J.V.; Garrido, S.; Moreno, L. The path to efficiency: Fast marching method for safer, more efficient mobile robot trajectories. IEEE Robot. Autom. Mag. 2013, 20, 111–120. [Google Scholar] [CrossRef] [Green Version]
- González, J.V.G. Fast Marching Methods in Path and Motion Planning: Improvements and High-Level Applications. Ph.D. Thesis, Universidad Carlos III de Madrid, Getafe, Spain, 2015. [Google Scholar]
- Peyre, G. Toolbox Fast Marching. Available online: https://www.mathworks.com/matlabcentral/fileexchange/6110-toolbox-fast-marching (accessed on 24 December 2020).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle Ranges | ||||
|---|---|---|---|---|
| Flight Level | 9 | 15 | 21 | 27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
López, B.; Muñoz, J.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Path Planning and Collision Risk Management Strategy for Multi-UAV Systems in 3D Environments. Sensors 2021, 21, 4414. https://doi.org/10.3390/s21134414
López B, Muñoz J, Quevedo F, Monje CA, Garrido S, Moreno LE. Path Planning and Collision Risk Management Strategy for Multi-UAV Systems in 3D Environments. Sensors. 2021; 21(13):4414. https://doi.org/10.3390/s21134414
Chicago/Turabian StyleLópez, Blanca, Javier Muñoz, Fernando Quevedo, Concepción A. Monje, Santiago Garrido, and Luis E. Moreno. 2021. "Path Planning and Collision Risk Management Strategy for Multi-UAV Systems in 3D Environments" Sensors 21, no. 13: 4414. https://doi.org/10.3390/s21134414
APA StyleLópez, B., Muñoz, J., Quevedo, F., Monje, C. A., Garrido, S., & Moreno, L. E. (2021). Path Planning and Collision Risk Management Strategy for Multi-UAV Systems in 3D Environments. Sensors, 21(13), 4414. https://doi.org/10.3390/s21134414