A Review of Data Analytic Applications in Road Traffic Safety. Part 2: Prescriptive Modeling

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Background: Hazmat Trucking Operations
3. Optimization Models for Minimizing Crash Risks/Costs
3.1. Risk Models in Hazmat Transportation
3.2. Classification Based on Model Type
3.3. Classification Based on the Types of Decision Variables, Input Parameters, Objective Function(s), and Constraints
3.3.1. Type of Decision Variables
3.3.2. Types of Input Parameters
3.3.3. Type of Objective Functions used in Hazmat Transportation
3.3.4. Structure of Constraints in Hazmat Transportation
3.4. Types of Algorithms (Computational Methods) Used
4. An Example Integrating Predictive and Prescriptive Models
4.1. Data Generation
4.2. Predictive Modeling
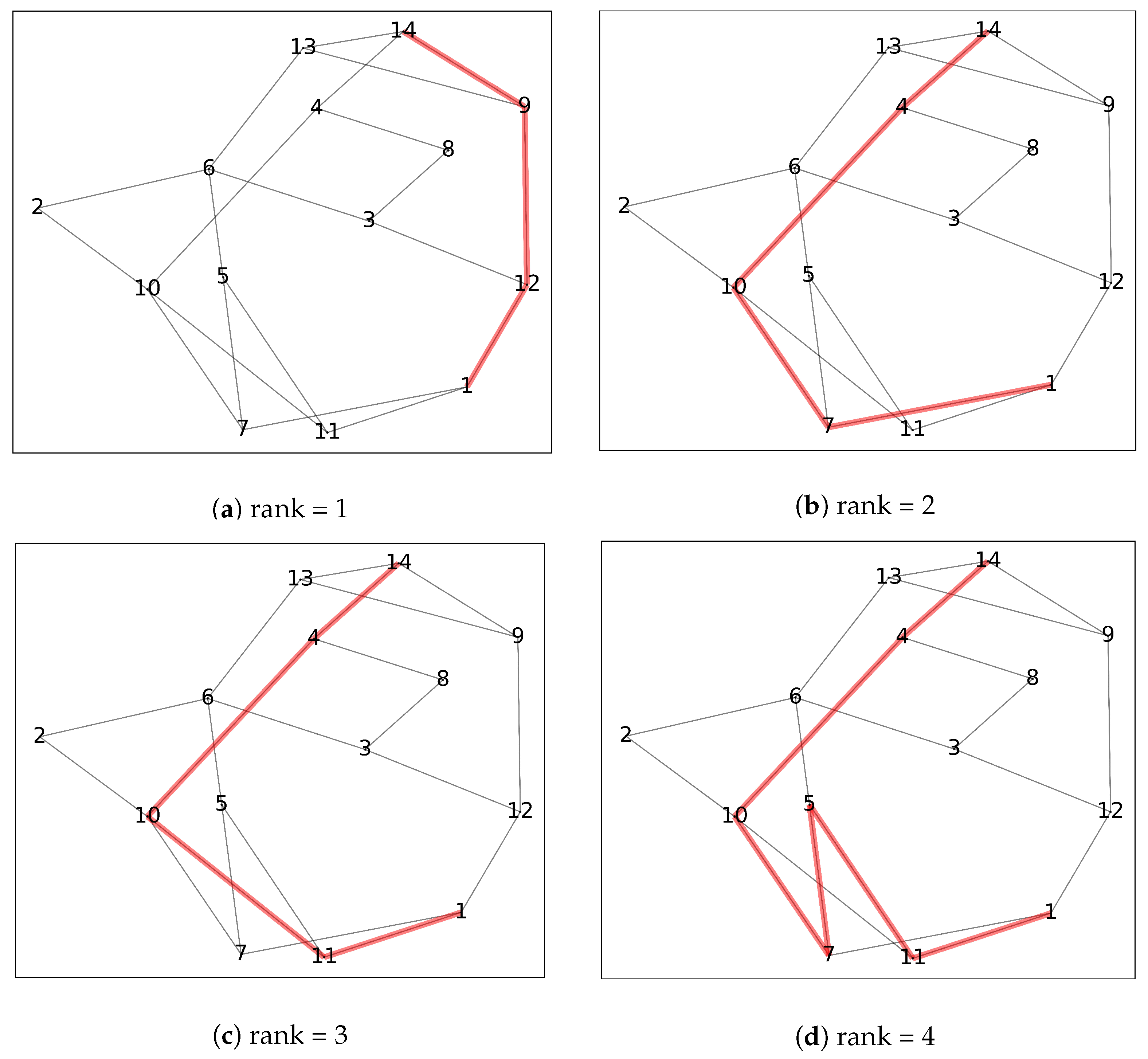
4.3. Prescriptive Modeling Using the k-Shortest Path Routing Algorithm
5. Conclusions
- (A)
- We have repeatedly observed the disconnect between the predictive and prescriptive models used in the literature. In our view, this is the most important gap in the literature. Before a practical implementation of safety-enabled dynamic routing for mainstream transportation can be achieved, a considerable effort in establishing best practices and guidelines is required. These efforts should primarily originate in the operations research community and should take advantage of the best ideas from the point above.
- (B)
- In the absence of advanced dynamic routing models, it is difficult to adequately evaluate potential benefits of such systems. At the same time, the uncertainty in such an evaluation is a significant factor discouraging efforts in this area. We believe that a thorough analysis of the extent of potential risk-reduction with intelligent routing represents a primary research goal for the near future.
- (C)
- The integration of risk prediction models with intelligent and dynamic routing models should be done with due diligence. As we showed in our simple simulation, an overall similarity in predictive performance does not necessarily lead to agreement on crash risk for a given path/route under certain conditions. Thus, researchers and practitioners should also attempt to diagnose/understand cases when the crash risk prediction models are performing poorly. Although this is more of a research-to-practice issue, we highlight this here to emphasize the possible dangers from deploying predictive models when their performance is not fully understood/analyzed.
Supplementary Materials
Funding
Conflicts of Interest
Abbreviations
| AUC | Area Under Curve |
| Hazmat | Hazardous Materials |
| MDP | Markov Chain Process |
| MSE | Mean Square Error |
| O–D | Origin-Destination |
| VRP | Vehicle Routing Problem |
References
- Zohar, D.; Huang, Y.H.; Lee, J.; Robertson, M.M. Testing extrinsic and intrinsic motivation as explanatory variables for the safety climate–safety performance relationship among long-haul truck drivers. Transp. Res. Part F Traffic Psychol. Behav. 2015, 30, 84–96. [Google Scholar] [CrossRef]
- Crum, M.R.; Morrow, P.C. The influence of carrier scheduling practices on truck driver fatigue. Transp. J. 2002, 42, 20–41. [Google Scholar]
- Crizzle, A.M.; Bigelow, P.; Adams, D.; Gooderham, S.; Myers, A.M.; Thiffault, P. Health and wellness of long-haul truck and bus drivers: A systematic literature review and directions for future research. J. Transp. Health 2017, 7, 90–109. [Google Scholar] [CrossRef]
- Commercial Motor Vehicle: Traffic Safety Facts. U.S. Department of Transportation. 2017. Available online: https://www.fmcsa.dot.gov/sites/fmcsa.dot.gov/files/docs/safety/data-and-statistics/84856/cmvtrafficsafetyfactsheet2016-2017.pdf (accessed on 28 April 2018).
- Table VM-1-Highway Statistics 2016-Policy|Federal Highway Administration. U.S. Department of Transportation, Office of Highway Policy Information. 2017. Available online: https://www.fhwa.dot.gov/policyinformation/statistics/2016/vm1.cfm (accessed on 28 April 2018).
- Hazmat Regulations. HOW TO USE. The Hazardous Materials Regulations. CFR 49 Parts 100 to 185. U.S. Department of Transportation Pipeline and Hazardous Materials Safety Administration. 2007. Available online: https://hazmatonline.phmsa.dot.gov/services/publication_documents/howtouse0507.pdf (accessed on 24 February 2019).
- PHMSA Datamart. 2018 (All Column Values) Hazmat Summary by Transportation Phase. U.S. Department of Transportation Pipeline and Hazardous Materials Safety Administration. Office of Hazardous Material Safety. 2019. Available online: https://portal.phmsa.dot.gov/analyticsSOAP/saw.dll?Dashboard (accessed on 24 February 2019).
- Batta, R.; Kwon, C. Handbook of OR/MS Models in Hazardous Materials Transportation; Springer: New York, NY, USA, 2013. [Google Scholar]
- Kalelkar, A.S.; Brooks, R.E. Use of multidimensional utility functions in hazardous shipment decisions. Accid. Anal. Prev. 1978, 10, 251–265. [Google Scholar] [CrossRef]
- Abkowitz, M.; Cheng, P.D.M. Developing a risk/cost framework for routing truck movements of hazardous materials. Accid. Anal. Prev. 1988, 20, 39–51. [Google Scholar] [CrossRef]
- Lepofsky, M.; Abkowitz, M.; Cheng, P. Transportation hazard analysis in integrated GIS environment. J. Transp. Eng. 1993, 119, 239–254. [Google Scholar] [CrossRef]
- Erkut, E. On the credibility of the conditional risk model for routing hazardous materials. Oper. Res. Lett. 1995, 18, 49–52. [Google Scholar] [CrossRef]
- Ashtakala, B.; Eno, L.A. Minimum risk route model for hazardous materials. J. Transp. Eng. 1996, 122, 350–357. [Google Scholar] [CrossRef]
- Miller-Hooks, E.; Mahmassani, H. Optimal routing of hazardous materials in stochastic, time-varying transportation networks. Transp. Res. Rec. J. Transp. Res. Board 1998, 1645, 143–151. [Google Scholar] [CrossRef] [Green Version]
- Frank, W.C.; Thill, J.C.; Batta, R. Spatial decision support system for hazardous material truck routing. Transp. Res. Part C Emerg. Technol. 2000, 8, 337–359. [Google Scholar] [CrossRef]
- Erkut, E.; Ingolfsson, A. Transport risk models for hazardous materials: Revisited. Oper. Res. Lett. 2005, 33, 81–89. [Google Scholar] [CrossRef]
- Chang, T.S.; Nozick, L.K.; Turnquist, M.A. Multiobjective path finding in stochastic dynamic networks, with application to routing hazardous materials shipments. Transp. Sci. 2005, 39, 383–399. [Google Scholar] [CrossRef]
- Akgün, V.; Parekh, A.; Batta, R.; Rump, C.M. Routing of a hazmat truck in the presence of weather systems. Comput. Oper. Res. 2007, 34, 1351–1373. [Google Scholar] [CrossRef]
- Toumazis, I.; Kwon, C. Routing hazardous materials on time-dependent networks using conditional value-at-risk. Transp. Res. Part C Emerg. Technol. 2013, 37, 73–92. [Google Scholar] [CrossRef] [Green Version]
- Kang, Y.; Batta, R.; Kwon, C. Value-at-risk model for hazardous material transportation. Ann. Oper. Res. 2014, 222, 361–387. [Google Scholar] [CrossRef]
- Erkut, E.; Alp, O. Designing a road network for hazardous materials shipments. Comput. Oper. Res. 2007, 34, 1389–1405. [Google Scholar] [CrossRef] [Green Version]
- Dadkar, Y.; Jones, D.; Nozick, L. Identifying geographically diverse routes for the transportation of hazardous materials. Transp. Res. Part E Logist. Transp. Rev. 2008, 44, 333–349. [Google Scholar] [CrossRef]
- Verter, V.; Kara, B.Y. A path-based approach for hazmat transport network design. Manag. Sci. 2008, 54, 29–40. [Google Scholar] [CrossRef] [Green Version]
- Bianco, L.; Caramia, M.; Giordani, S. A bilevel flow model for hazmat transportation network design. Transp. Res. Part C Emerg. Technol. 2009, 17, 175–196. [Google Scholar] [CrossRef] [Green Version]
- Kang, Y.; Batta, R.; Kwon, C. Generalized route planning model for hazardous material transportation with var and equity considerations. Comput. Oper. Res. 2014, 43, 237–247. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Karwan, M.H.; Kwon, C. Robust hazmat network design problems considering risk uncertainty. Transp. Sci. 2015, 50, 1188–1203. [Google Scholar] [CrossRef]
- Xin, C.; Letu, Q.; Wang, J.; Zhu, B. Robust optimization for the hazardous materials transportation network design problem. J. Comb. Optim. 2015, 30, 320–334. [Google Scholar] [CrossRef]
- Esfandeh, T.; Batta, R.; Kwon, C. Time-dependent hazardous-materials network design problem. Transp. Sci. 2017, 52, 454–473. [Google Scholar] [CrossRef] [Green Version]
- Fan, T.; Chiang, W.C.; Russell, R. Modeling urban hazmat transportation with road closure consideration. Transp. Res. Part D Transp. Environ. 2015, 35, 104–115. [Google Scholar] [CrossRef]
- Wang, J.; Kang, Y.; Kwon, C.; Batta, R. Dual toll pricing for hazardous materials transport with linear delay. Netw. Spat. Econ. 2012, 12, 147–165. [Google Scholar] [CrossRef] [Green Version]
- Marcotte, P.; Mercier, A.; Savard, G.; Verter, V. Toll policies for mitigating hazardous materials transport risk. Transp. Sci. 2009, 43, 228–243. [Google Scholar] [CrossRef]
- Esfandeh, T.; Kwon, C.; Batta, R. Regulating hazardous materials transportation by dual toll pricing. Transp. Res. Part B Methodol. 2016, 83, 20–35. [Google Scholar] [CrossRef] [Green Version]
- Assadipour, G.; Ke, G.Y.; Verma, M. A toll-based bi-level programming approach to managing hazardous materials shipments over an intermodal transportation network. Transp. Res. Part D Transp. Environ. 2016, 47, 208–221. [Google Scholar] [CrossRef]
- ReVelle, C.; Cohon, J.; Shobrys, D. Simultaneous siting and routing in the disposal of hazardous wastes. Transp. Sci. 1991, 25, 138–145. [Google Scholar] [CrossRef]
- Xie, Y.; Lu, W.; Wang, W.; Quadrifoglio, L. A multimodal location and routing model for hazardous materials transportation. J. Hazard. Mater. 2012, 227, 135–141. [Google Scholar] [CrossRef]
- Samanlioglu, F. A multi-objective mathematical model for the industrial hazardous waste location-routing problem. Eur. J. Oper. Res. 2013, 226, 332–340. [Google Scholar] [CrossRef]
- Ardjmand, E.; Young, W.A.; Weckman, G.R.; Bajgiran, O.S.; Aminipour, B.; Park, N. Applying genetic algorithm to a new bi-objective stochastic model for transportation, location, and allocation of hazardous materials. Expert Syst. Appl. 2016, 51, 49–58. [Google Scholar] [CrossRef]
- Romero, N.; Nozick, L.K.; Xu, N. Hazmat facility location and routing analysis with explicit consideration of equity using the Gini coefficient. Transp. Res. Part E Logist. Transp. Rev. 2016, 89, 165–181. [Google Scholar] [CrossRef]
- List, G.F.; Turnquist, M.A. Routing and emergency-response-team siting for high-level radioactive waste shipments. IEEE Trans. Eng. Manag. 1998, 45, 141–152. [Google Scholar] [CrossRef]
- Zografos, K.G.; Androutsopoulos, K.N. A decision support system for integrated hazardous materials routing and emergency response decisions. Transp. Res. Part C Emerg. Technol. 2008, 16, 684–703. [Google Scholar] [CrossRef]
- Taslimi, M.; Batta, R.; Kwon, C. A comprehensive modeling framework for hazmat network design, hazmat response team location, and equity of risk. Comput. Oper. Res. 2017, 79, 119–130. [Google Scholar] [CrossRef] [Green Version]
- Lozano, A.; Muñoz, Á.; Macías, L.; Antún, J.P. Hazardous materials transportation in Mexico City: Chlorine and gasoline cases. Transp. Res. Part C Emerg. Technol. 2011, 19, 779–789. [Google Scholar] [CrossRef]
- Saccomanno, F.F.; Chan, A.W. Economic Evaluation of Routing Strategies for Hazardous Road Shipments, Number 1020. 1985.
- Alp, E. Risk-based transportation planning practice: Overall methodology and a case example. INFOR Inf. Syst. Oper. Res. 1995, 33, 4–19. [Google Scholar] [CrossRef]
- Zografos, K.G.; Androutsopoulos, K.N. A heuristic algorithm for solving hazardous materials distribution problems. Eur. J. Oper. Res. 2004, 152, 507–519. [Google Scholar] [CrossRef]
- Pradhananga, R.; Taniguchi, E.; Yamada, T. Ant colony system based routing and scheduling for hazardous material transportation. Procedia Soc. Behav. Sci. 2010, 2, 6097–6108. [Google Scholar] [CrossRef] [Green Version]
- Pradhananga, R.; Taniguchi, E.; Yamada, T.; Qureshi, A.G. Bi-objective decision support system for routing and scheduling of hazardous materials. Socio-Econ. Plan. Sci. 2014, 48, 135–148. [Google Scholar] [CrossRef]
- Bula, G.A.; Prodhon, C.; Gonzalez, F.A.; Afsar, H.M.; Velasco, N. Variable neighborhood search to solve the vehicle routing problem for hazardous materials transportation. J. Hazard. Mater. 2017, 324, 472–480. [Google Scholar] [CrossRef] [PubMed]
- Verma, M.; Verter, V. Railroad transportation of dangerous goods: Population exposure to airborne toxins. Comput. Oper. Res. 2007, 34, 1287–1303. [Google Scholar] [CrossRef]
- Abkowitz, M.; Lepofsky, M.; Cheng, P. Selecting criteria for designating hazardous materials highway routes. Transp. Res. Rec. 1992, 1333, 30–35. [Google Scholar]
- Androutsopoulos, K.N.; Zografos, K.G. Solving the bicriterion routing and scheduling problem for hazardous materials distribution. Transp. Res. Part C Emerg. Technol. 2010, 18, 713–726. [Google Scholar] [CrossRef] [Green Version]
- Erkut, E.; Ingolfsson, A. Catastrophe avoidance models for hazardous materials route planning. Transp. Sci. 2000, 34, 165–179. [Google Scholar] [CrossRef]
- Bell, M.G. Mixed routing strategies for hazardous materials: Decision-making under complete uncertainty. Int. J. Sustain. Transp. 2007, 1, 133–142. [Google Scholar] [CrossRef]
- Sivakumar, R.A.; Batta, R.; Karwan, M.H. A network-based model for transporting extremely hazardous materials. Oper. Res. Lett. 1993, 13, 85–93. [Google Scholar] [CrossRef]
- Sherali, H.D.; Brizendine, L.D.; Glickman, T.S.; Subramanian, S. Low probability—High consequence considerations in routing hazardous material shipments. Transp. Sci. 1997, 31, 237–251. [Google Scholar] [CrossRef]
- Toumazis, I.; Kwon, C.; Batta, R. Value-at-risk and conditional value-at-risk minimization for hazardous materials routing. In Handbook of OR/MS Models in Hazardous Materials Transportation; Springer: New York, NY, USA, 2013; pp. 127–154. [Google Scholar]
- Erkut, E.; Tjandra, S.A.; Verter, V. Hazardous materials transportation. Handb. Oper. Res. Manag. Sci. 2007, 14, 539–621. [Google Scholar]
- Patel, M.H.; Horowitz, A.J. Optimal routing of hazardous materials considering risk of spill. Transp. Res. Part A Policy Pract. 1994, 28, 119–132. [Google Scholar] [CrossRef]
- Giannikos, I. A multiobjective programming model for locating treatment sites and routing hazardous wastes. Eur. J. Oper. Res. 1998, 104, 333–342. [Google Scholar] [CrossRef]
- Pradhananga, R.; Hanaoka, S.; Sattayaprasert, W. Optimisation model for hazardous material transport routing in Thailand. Int. J. Logist. Syst. Manag. 2011, 9, 22–42. [Google Scholar] [CrossRef]
- Xie, C.; Waller, S.T. Optimal routing with multiple objectives: Efficient algorithm and application to the hazardous materials transportation problem. Comput. Aided Civ. Infrastruct. Eng. 2012, 27, 77–94. [Google Scholar] [CrossRef]
- Zhang, J.; Hodgson, J.; Erkut, E. Using GIS to assess the risks of hazardous materials transport in networks. Eur. J. Oper. Res. 2000, 121, 316–329. [Google Scholar] [CrossRef]
- Bonvicini, S.; Spadoni, G. A hazmat multi-commodity routing model satisfying risk criteria: A case study. J. Loss Prev. Process Ind. 2008, 21, 345–358. [Google Scholar] [CrossRef]
- Androutsopoulos, K.N.; Zografos, K.G. A bi-objective time-dependent vehicle routing and scheduling problem for hazardous materials distribution. EURO J. Transp. Logist. 2012, 1, 157–183. [Google Scholar] [CrossRef]
- Conca, A.; Ridella, C.; Sapori, E. A risk assessment for road transportation of dangerous goods: A routing solution. Transp. Res. Procedia 2016, 14, 2890–2899. [Google Scholar] [CrossRef] [Green Version]
- Bowden, Z.E.; Ragsdale, C.T. The truck driver scheduling problem with fatigue monitoring. Decis. Support Syst. 2018, 110, 20–31. [Google Scholar] [CrossRef]
- Qu, H.; Xu, J.; Wang, S.; Xu, Q. Dynamic Routing Optimization for Chemical Hazardous Material Transportation under Uncertainties. Ind. Eng. Chem. Res. 2018, 57, 10500–10517. [Google Scholar] [CrossRef]
- Karkazis, J.; Boffey, T. Optimal location of routes for vehicles transporting hazardous materials. Eur. J. Oper. Res. 1995, 86, 201–215. [Google Scholar] [CrossRef]
- Yen, J.Y. Finding the k shortest loopless paths in a network. Manag. Sci. 1971, 17, 712–716. [Google Scholar] [CrossRef]
- H2O.ai. Python Interface for H2O, Version 3.22.1.3. 2019.
- Wickham, H. ggplot2: Elegant Graphics for Data Analysis; Springer: New York, NY, USA, 2016. [Google Scholar]



{kind=link}
{kind=link}
| Model | Risk Indicator | Formula | Example Application Papers |
|---|---|---|---|
| Traditional risk | [40,44,45,46,47,48] | ||
| Incident consequence | [14,34,42,49] | ||
| Incident probability | [43] | ||
| Perceived risk | [50,51] | ||
| Mean-variance | [52] | ||
| Disutility | [52] | ||
| Maximum risk | [52] | ||
| MM (Uncertain probabilities) | [53] | ||
| Conditional probability | [54,55] | ||
| Value at risk (potential loss) | [19,20,25] | ||
| Conditional value at risk (Probability with large loss) | [19,56] |
| Semi-Deterministic Models | Stochastic Models | |
|---|---|---|
| Truly-static | G1 Def.: Risk only depends on the arc’s length and the binary variable for each arc denoting path selection. All the parameters considered are deterministic and the optimal solution does not update. Examples: [12,42,49,55,58,59,60,61] | G2 Def.: Risk only depends on the arc’s length and the binary variable for each arc denoting path selection. Model has random parameter(s) and the optimal solution does not update. Note: This group cannot exist in practice since the inclusion of a random parameter will make the optimal solution changeable according to the conditions. |
| Semi-dynamic | G3 Def.: Risk only depends on the arc’s length and the binary variable for each arc denoting path selection. All other parameters are fixed. The optimal solution is a conditional decision, which will be different according to the realization of parameters. Examples: [20,25,56] | G4 Def.: Risk depends only on the arc’s length and the binary variable for each arc denoting path selection. Model has random parameter(s). The optimal solution is a conditional decision, which will be different according to the realization of parameters and value of stochastic input(s). Examples: [14,19,40,42,45,46,47,48,51,62,63,64,65,66] |
| Truly-dynamic | G5 Def.: Risk only depends on the arc’s length and the binary variable for each arc denoting path selection. Other parameters are fixed. The model has criteria to update the solution (i.e., run the model based on querying the values of parameters) in real-time. Examples: None found. | G6 Def.: Risk depends only on the arc’s length and the binary variable for each arc denoting path selection. Model has random parameter(s). The model has criteria to update the solution (i.e., run the model based on querying the values of parameters) in real-time. Examples: [67] |
| Type ID | Type of Parameter | Example Papers and Applications |
|---|---|---|
| 1 | Risk parameters including probability of accident and/or expected consequence | These parameters are included in all safety-based routing optimization papers and thus, we will not highlight specific papers here |
| 2 | Parameters for the traditional vehicle routing problem (VRP) | [40,45,46,47,48,51,60,64] |
| 3 | Parameters about the confidence interval of accident or the worst case | [19,56,63] |
| 4 | Parameters of travel time | [14,19,45,46,51,64,67] |
| 5 | Parameters about traffic condition | [56,63,65] |
| 6 | Parameters about weather condition | [58,65,67] |
| 7 | Parameters of dispersion model to calculate the concentration level | [58,62,64] |
| 8 | Parameters about road geometric condition | [65,67] |
| 9 | Parameters about traveling cost | [60,65] |
| 10 | Parameters about the threshold of accident probability or/and consequence | [55] |
| 11 | Parameters about equity constraint | [25] |
| Objective | Details about Objective in Model | Papers | PT-ID |
|---|---|---|---|
| Minimize cumulative VaR for all hazmat routes | VaR is used in these two papers to denote the maximum cutoff risk for each arc due to hazmat transportation | [25] | 1, 3, 11 |
| [20] | 1, 3 | ||
| VaR denotes the risk level, such that the risk for each selected arc exceeding a certain risk level is ≤ a pre-specified probability threshold | [56] | 1, 3 | |
| Minimize CVaR | CVaR is a coherent risk measure to avoid ignoring low-probability highly consequential crashes | [56] | 1, 3 |
| [19] | 1, 3, 4 | ||
| Minimize travel cost and/or risk | Population exposure and travel time | [14] | 1, 4 |
| Travel cost and risk exposure costs such as population exposure, facilities-related exposure, and pavement-related exposure | [60] | 1, 2, 9 | |
| Traditional risk (the product of risk probability and the consequence) and travel time | [47] | 1, 2 | |
| [64] | 1, 2, 4 | ||
| [40] | 1, 2 | ||
| [45] | 1, 2, 4 | ||
| Perceived risk (PR) and travel time | [51] | 1, 2, 4 | |
| Direct travel cost and the risk cost depends on frequency of risk and leakage probability | [65] | 1, 5, 6, 8, 9 | |
| Total risk, which is defined in this application as the total expected concentration level of gas or aerosols when an accident happens | [58] | 1, 7 | |
| Population Exposure model (including travelers) | [42] | 1, 5 | |
| Conditional expectation of the consequence given an accident happens (at the same time the probability of accident for the path cannot exceed a certain number and also the consequence should lower than or equal to a threshold) | [55] | 1, 10 | |
| Total number of vehicles, scheduling time, and the traditional risk (TR) | [46] | 1, 2, 4 |
| Type | Description of the Algorithm | Example Papers |
|---|---|---|
| Exact | Branch-and-Bound | [55,68] |
| Branch-and-Bound with a relaxing risk equity constraint as the penalty parameter in the objective function | [25] | |
| Two-stage solution: Inner stage is to the solve shortest path problem using Dijkstra’s algorithm; Outer loop is an algorithm to select a solution to minimize VaR and CVaR | [20,56] | |
| Two-stage solution: Sub-problem uses a back-labeling algorithm to solve the dynamic shortest path problem; Main problem is a CVaR minimization problem by the proposed algorithm | [19] | |
| An approach using STDLT(DD), STDLT(SD) and EV algorithms | [14] | |
| Heuristic | An insertion heuristic algorithm is used to determine non-dominated scheduled route-paths; then a newly proposed label setting algorithm is used to identify the entire set of k-shortest scheduled route-paths | [51] |
| Based on the shortest path algorithm, the bi-objective VRP is decomposed to single objective problems, then solved using an insertion heuristic algorithm to approximate a set of non-dominated solutions | [40,45] | |
| Multiple objectives are converted to a bi-objective problem using a decomposition method; then a proposed constrained parametric method is applied to solve the shortest path problem and transfer the bi-objective problem to two single objectives | [61] | |
| A labeling algorithm is applied to find the shortest path between customers and the depot, then a MOACS-based algorithm is used to find a set of non-dominant solutions for the VRPTW | [47] | |
| An algorithm based on a heuristic GA is applied to solve HVRPTW | [60] | |
| A route-building heuristic algorithm based on a label-setting algorithm is used to solve the single objective time-dependent shortest path problem | [64] | |
| Meta-heuristic algorithm based on an ACS is supported by labeling algorithm for HVRPTW | [46] |
| Model Performance Metrics | Logistic | Poisson | XGBoost | Neural Networks |
|---|---|---|---|---|
| train AUC | 0.5596 | — | 0.6024 | 0.5743 |
| test AUC | 0.5639 | — | 0.5456 | 0.5327 |
| train accuracy | 0.8936 | — | 0.8933 | 0.8936 |
| test accuracy | 0.8941 | — | 0.8941 | 0.8941 |
| train MSE | 0.0948 | 0.1647 | 0.2353 | 0.0949 |
| test MSE | 0.0938 | 0.1717 | 0.2352 | 0.0954 |
| Path | Rank by Distance | Rank by Logistic Regression | Rank by Poisson Regression | Rank by XGBoost | Rank by Neural Networks |
|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 4 | |
| 2 | 2 | 2 | 2 | 3 | |
| 3 | 3 | 3 | 3 | 2 | |
| 4 | 4 | 4 | 4 | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Q.; Cai, M.; Mohabbati-Kalejahi, N.; Mehdizadeh, A.; Alamdar Yazdi, M.A.; Vinel, A.; Rigdon, S.E.; Davis, K.C.; Megahed, F.M. A Review of Data Analytic Applications in Road Traffic Safety. Part 2: Prescriptive Modeling. Sensors 2020, 20, 1096. https://doi.org/10.3390/s20041096
Hu Q, Cai M, Mohabbati-Kalejahi N, Mehdizadeh A, Alamdar Yazdi MA, Vinel A, Rigdon SE, Davis KC, Megahed FM. A Review of Data Analytic Applications in Road Traffic Safety. Part 2: Prescriptive Modeling. Sensors. 2020; 20(4):1096. https://doi.org/10.3390/s20041096
Chicago/Turabian StyleHu, Qiong, Miao Cai, Nasrin Mohabbati-Kalejahi, Amir Mehdizadeh, Mohammad Ali Alamdar Yazdi, Alexander Vinel, Steven E. Rigdon, Karen C. Davis, and Fadel M. Megahed. 2020. "A Review of Data Analytic Applications in Road Traffic Safety. Part 2: Prescriptive Modeling" Sensors 20, no. 4: 1096. https://doi.org/10.3390/s20041096