5G Beyond 3GPP Release 15 for Connected Automated Mobility in Cross-Border Contexts


1
Vicomtech Foundation, Basque Research and Technology Alliance (BRTA), Mikeletegi 57, 20009 Donostia-San Sebastián, Spain
2
Department of Communications & Networking, Aalto University School of Electrical Engineering, P.O. Box 15600, FI-02150 Aalto, Finland
*
Author to whom correspondence should be addressed.
Sensors 2020, 20(22), 6622; https://doi.org/10.3390/s20226622
Submission received: 12 October 2020
/
Revised: 6 November 2020
/
Accepted: 17 November 2020
/
Published: 19 November 2020
(This article belongs to the Special Issue Sensors for Road Vehicles of the Future)
Abstract
:Fifth-generation (5G) mobile networks aim to be qualified as the core connectivity infrastructures to address connected automated mobility (CAM), both from a technological and from a business perspective, for the higher automation levels defined by the automotive industry. Specifically, in some territories such as the European Union the cross-border corridors have relevance, as they are the cohesive paths for terrestrial transport. Therefore, 5G for CAM applications is planned to be deployed there first. However, cross-border contexts imply paramount communication challenges, such as seamless roaming, not addressed by current technology. This paper identifies relevant future 5G enhancements, specifically those specified by Third-Generation Partnership Project (3GPP) releases beyond Release 15, and outlines how they will support the ambitions of highly automated driving in cross-border corridors. In order to conduct this study, a set of representative use cases and the related communication requirements were identified. Then, for each use case, the most relevant 5G features were proposed. Some open issues are described at the end.
1. Introduction
Automation Levels 4 and 5 (L4 and L5), defined by Society of Automotive Engineers (SAE), will not require someone to take over driving. Such automation levels are expected to be first introduced in highways, as the technical complexity on those roads is lower and the investment profitability prospects are higher compared with urban roads. Cross-border corridors are particularly interesting, as they fit in the highway road type, and they constitute an essential backbone for road transport between countries. However, achieving seamless connectivity that satisfies the needs of connected and automated mobility (CAM) is very challenging in cross-border contexts. The main challenges include roaming and handover latencies, uninterrupted access to required communications and computing resources, data interoperability and accurate geo-positioning.
The vehicle-to-everything (V2X) communication systems can integrate different communication technologies, including cellular systems in centimetre wave (cm-wave) and millimetre wave (mmWave), dedicated short range spectrum (DSRC) and vehicular visible light communications (VVLC). Currently, the automotive industry is putting its effort into cellular systems and DSRC implementations [1]. The 3rd Generation Partnership Project (3GPP) defined the first set of cellular standards for V2X communication under the name long-term evolution (LTE)-V2X in 3GPP Release 14 (Rel-14). LTE-V2X is evolving to 5G, providing the main radio interface to support cellular V2X communication [2]. On the other hand, DSRC vehicular communication technology uses Wi-Fi based physical layer (PHY) and medium access control (MAC) layer protocols following the IEEE 802.11p standard. The adaptation of the widely-used IEEE 802.11 standard for Wi-Fi is being implemented in Europe under the name ITS-G5. As a readily-available, internationally-recognised standard which does not require licensed spectrum, it seems that DSRC technology is well placed. Moreover, some experimental works have already demonstrated its suitability for some specific autonomous driving operations [3]. However, it has a shorter range (few 100 metres), lower data rate, worse spectrum efficiency and more limited quality of service (QoS) management capabilities than 5G [4]. Regardless of the adoption of 5G for CAM, its deployment for consumer electronics is going to be done in any case, fostering new business opportunities for many actors at different levels and sectors [5,6,7], including small and medium-sized enterprises (SMEs) working on data exploitation at cloud level, which is another big incentive for adopting 5G in CAM instead or in combination with DSRC.
There are already some works studying the features to be added and the potential of 6G [8,9]; however, the application of 5G technology in different verticals is still in the experimental stage and needs more research. In 2017, the European Union agreed to establish 5G cross-border corridors with the ambition of having the biggest experimental area in 5G technology. The European Commission, coordinated with public and private actors, is currently focused on these corridors to run CAM projects and to devise digital policies and regulations. Stemming from the work done in one of these ongoing projects, 5G-MOBIX [10], the present article aims to shed some light on the roadmap for deploying SAE L4 and L5 CAM in cross-border roads employing 5G technologies. More specifically, the contributions in this article can be summarised as follows:
- We review the 5G enhancements beyond 3GPP Release 15 (Rel-15) that are most relevant for CAM contexts;
- We identify a set of CAM use cases that target the CAM challenges in cross-border contexts;
- We identify the main communication requirements of the use cases and justify the need for features beyond 3GPP Rel-15 to implement them;
- We propose an implementation, matching the identified use cases and the relevance of 5G features beyond Rel-15, to realise the use cases while satisfying their performance expectations;
- We identify some relevant open issues.
Previous works in the literature do not address the challenges for highly automated driving in cross-border contexts and the new features planned for future 3GPP releases and their relevance there. References [4,6] gave first glimpses of the possibilities of 5G technologies for connected cars, but only addressed up to 3GPP Rel-15. Reference [2] discussed some of the recent technological advances and standardisation developments in cellular vehicle-to-everything (C-V2X) communications, but they did not match them to specific use cases. Reference [1] reviewed the current standardisation efforts focusing on MAC and PHY layers and not on vertical applications. Reference [11] described the general 3GPP Release 16 (Rel-16) features and provided an outlook towards Release 17 (Rel-17) and beyond, but without discussing their applications in vehicular communications and their impacts on autonomous driving. Therefore, the main novelty of this paper is its showing the limitations of the currently available technologies and the possible solutions exploiting planned 3GPP Releases in the context of CAM in cross-border corridors. The insights presented here are valuable not only for the European Union, but also for any 5G cross-border deployment around the world.
2. 5G Technologies beyond Release 15
C-V2X has its foundation in the enhancement applied to LTE, as specified in 3GPP Rel-14, to support vehicle connectivity for mostly safety related use cases. This involves use of both short-range direct connectivity and long-range connectivity via existing mobile network infrastructure. Network communications operate over licensed spectrum and messages are transmitted to user equipment (UE) via Evolved Node B (enodeB) using the Uu interface. In contrast, direct communications allow vehicles to directly exchange information using the PC5 interface [1]. 3GPP Rel-15 introduced a set of enhancements for Rel-14 LTE-V2X PC5 and 5G New Radio (NR) technology for the Uu interface. The use of 5G NR leveraged the benefits of increased capacity, reduced latency and improved reliability enabling the environment for more advanced use cases in autonomous mobility that typically require timely and reliable transfers of vast amount of data. However, 3GPP Rel-15 is only an introductory point for 5G NR in C-V2X; specifications of further enhancements are ongoing or were almost complete in subsequent releases. In this section, we highlight some of the new or continued enhancements in 3GPP releases that further strengthen 5G NR’s robustness as a C-V2X solution for advanced automotive use cases in various contexts, including cross-border scenarios.
2.1. Roaming
Control plane steering of roaming (CP-SOR) was introduced in Rel-15. This Rrlease supports inter-operator security to deal with the security issues in the inter-operator interface. Rel-16 will include increased home control for authentication and steering of roaming [11]. It will also manage roaming of home routed traffic and local breakout traffic in the visited PLMN. Further enhancements for the 5G CP-SOR are expected in Rel-17, such as the consideration of disaster conditions caused, for instance, by natural hazards. If the available public land mobile networks (PLMNs) indicate that the disaster condition applies, and even if these PLMNs are in the “forbidden PLMN” data field in the SIM, these PLMNs must be considered allowable for registration to the UE while the disaster condition is active [12].
2.2. Multi-Radio Dual Connectivity
The road infrastructure may provide connectivity coverage by means of different radio access technologies (RATs), including LTE and 5G NR, operated in different bands and provided by a common operator. Heterogeneous V2X communications can help addressing the bandwidth and scalability requirements that future vehicular networks will face [13]. This may provide an opportunity for a vehicle to utilise simultaneous connections for increased capacity through bonding or enhance reliability through the inherent redundancy. To that end, multi-radio dual (MR-DC) schemes, initially specified in the final phase (“late drop”) of Rel-15, include LTE-NR dual connectivity and NR-NR dual connectivity. In Rel-16, asynchronous NR-NR dual connectivity is specified to avoid the need to collocate gNodeBs (gNBs), providing dual connectivity and reduced dual connectivity setup delays [14]. Furthermore, the space industry is joining in to develop a stack configuration which inter-operates within a 5G architecture [15,16].
2.3. Multi-Sim Support
Vehicles traverse areas covered by multiple public land mobile networks (PLMNs) and transit between two PLMN coverage areas (e.g., cross-border). In the multi-PLMN scenario, the vehicle’s home PLMN (original serving network) may have areas with poor QoS or ineffective coverage due to overloading, network failure, etc. In order to ensure vehicle-to-network (V2N) connectivity, the ability of the vehicle to seamlessly switch to or simultaneously utilise a visited PLMN enables safer operation of the vehicle regardless of instantaneous network conditions. The vehicle connectivity to multiple PLMNs would typically require onboard units (OBUs) with several subscriber identity modules (SIMs), one for attaching to each PLMN. Devices ready to host multiple SIMs (multi-SIM) are widely available in the market, mostly using proprietary solutions through device vendors without any support from 3GPP specifications. However, 3GPP has approved a working item in Rel-17 to provide standardised support for multi-SIM UE [17], which can prove beneficial from a reliability perspective.
2.4. Nr Positioning
Urban areas with tall buildings or regions with dense foliage require cm-precision positioning. mmWave technology can be exploited to complement global navigation satellite systems (GNSS), and to accurately measure vehicle position [18]. 3GPP Rel-16 introduces native support for positioning on the NR carrier, applicable for mmWave frequencies [19].
2.5. Enhanced Sidelink
The short range connectivity between vehicles and roadside infrastructure, pedestrians or other vehicles was originally based on LTE-based sidelink. The use of PC5 interface in LTE sidelinks for C-V2X was specified in both Rel-14 and Rel-15, with limitations associated with legacy LTE technologies. A very detailed overview of sidelink under Rel-14 can be found in [20]. The limitations of Rel-14 satisfying the QoS requirements of several crash scenarios are described in [21]. In Rel-16, a 5G NR sidelink was introduced as a complement to LTE-based sidelink [22]. This brings the higher reliability and low latency benefits of NR to the sidelines, and provides flexibility in spectrum usage for the sidelink by using a dedicated NR spectrum or dynamic sharing of the LTE-Uu or NR-Uu spectrum.
2.6. Broadcast and Multicast
Under some conditions and road events, traffic may require urgent alerting in multiple destinations within a local area and for a specific time. To facilitate this delivery model and serve local messages in an efficient manner, broadcast and multicast communication services can make the difference. These communication models might contribute to public and vehicular safety, thereby enhancing operational scalability [23]. Rel-14 included only broadcast without feedback, while Rel-16 will include feedback for increased reliability [24].
2.7. Mmwave Communications
The mmWave bands are already identified as enablers for network capacity and throughput enhancements for 5G V2X [25,26]. From the 3GPP perspective, in Rel-15 and Rel-16 the frequency range 2 (FR2: 24,250–52,600 MHz) mmWave bands were specified for 5G NR to complement frequency range 1 (FR1: 410–7125 MHz) bands, opening up new spectrum resources for demanding vertical applications, such as CAM. While FR2 provides at least an order of magnitude higher bandwidth compared to FR1, in Rel-17 there are already efforts being made to evaluate bands from the 52.6–71 GHz region with potentially larger spectrum bandwidths relative to FR2 [27].
As future vehicular systems will demand Gbps links to upload the collected sensor data for advanced automated driving, mmWave bands have become the candidate for 5G spectrum scalability.
2.8. Network Slicing
A vehicle may typically support multiple service/traffic types (safety-related and infotainment) associated with different uses cases where each one demands different levels of throughput, latency, reliability, robustness and so on. The different services may mapped to different standardised slice types optimised for the needs of each service. To that end, 3GPP Rel-15 specified three slice/service types (SST) customised for enhanced mobile broadband (eMBB), ultra reliable low latency communications (URLLC) and massive IoT (MIoT) services [28]. The SST slices can be controlled by slice differentiator (SD) values for more granular slice definitions. In Rel-16, roaming support for mutually exclusive access slicing is planned [29]. Thus, slicing will improve roaming performance.
2.9. Edge Computing
Advanced vehicular applications and services require ultra-low latency and high bandwidth computing. To alleviate core networks from these demanding requirements and efficiently serve local queries, multi-access edge computing (MEC) technologies bring computing capabilities at the edge of the network [30,31]. Under this connect-compute environment, MEC allows telecommunication operators to flexibly deploy and enhance the computing scalability of networks. Rel-16 provides further enhancements to improve the coordination of mobility procedures with the application. Newer releases will introduce further enhancements to support edge computing for V2X [11].
The value added by each of the previously described 5G features is summarised in Table 1.
3. Challenging Cross-Border Use Cases
3.1. Identification of Use Cases
As noted in the introduction, cross-border contexts create challenging situations for CAM, specially regarding service continuity. In order to plan the infrastructure and technology required for operating 5G-enabled CAM in cross-border roads it is necessary to conduct some experiments. It is a common approach in engineering to define a set of use cases that represent the most significant interactions with the system under test. 3GPP identified a set of V2X scenarios grouped into five categories [32]: advanced driving, vehicle platooning, extended sensors, remote driving and vehicle QoS support.
Vehicle platooning aims at green driving by grouping a set of vehicles to travel together one after the other. The vehicles that are part of the platoon exchange periodic data to move in a cooperative way. Here, autonomous vehicles can automatically join and leave platoons. Autonomous platooning is expected to be adopted first by trucks, which are some of the main users of cross-border corridors. Platooning optimises transport by using roads more effectively, reducing traffic jams and consequently delivering goods faster.
“Extended sensors” is focused on extending the perception obtained by the onboard sensors, with sensor data received from surrounding vehicles or road side units (RSUs). This way, vehicles generate an enhanced perception of the environment beyond what their own sensors can detect. High-resolution data streams produced by cameras and Lidars impose highly demanding communication requirements. Extended Sensors may require querying data from distant RSUs or vehicles. This could imply communicating with devices located in different countries in a cross-border scenario.
Remote driving enables a remote driver or a V2X application to operate a remote vehicle. In this CAM use case, a remote operator takes control of the vehicle when a breakdown or complex environment impedes the autonomous vehicle’s trajectory. The remote operator can be located in a different country from the vehicle position, so the constraints on a cross-border context may present operational limitations.
Advanced driving implies complex manoeuvres such as overtaking or cooperative collision avoidance that require sharing the driving intentions with the vehicles in proximity. Poor performance of the communication pipeline in terms of latency or reliability may lead to a decrease in the level of automation and/or increase likelihood of accidents. Such a safety-critical use case needs to be tested in as many situations as possible, including roaming or supporting MECs when located in different countries.
Vehicle QoS support could be considered a horizontal use case, whereby the vehicle is able to anticipate network QoS fluctuations and adjusts its service requirements accordingly. Moreover, the network is able to allocate connectivity resources to preserve a QoS to satisfy application needs and the application can adapt its traffic demands to meet network performance. The overall goal is to offer a smooth user experience, meaning the coordination of different network infrastructures of both sides in a cross-border context to perform seamless transitions.
3.2. Use Cases’ Requirements
Each of the identified use cases can be implemented with different levels of automation while they all require high performance parameters in terms of connectivity. In this paper we focus on highly automated driving, that is, SAE L4 and L5. Here, the requirements are even more demanding as there is no handover to manual driving.
The spatial- and time-accuracy required by L4 and L5 autonomous vehicles with respect to object localisation are key factors when translating the nominal performance of communication technologies to operational parameters of use cases. The latency in the positioning messages received from another vehicle or entity adds uncertainty to the transmitted localisation value, with a higher impact on the longitudinal direction. This effect is depicted in Figure 1 for the longitudinal error.
The localisation requirements for autonomous vehicles were studied in [33], and they concluded that a maximum lateral error of 0.57 m and a maximum longitudinal error of 1.40 m are acceptable for passenger vehicles travelling on highways—the most common road type at cross-border corridors. Considering that state-of-the art ego-vehicle localisation methods have in general sub-metre accuracy in the order of several decimetres [34], there is little room for positioning error induced by network latency. To study the potential effect of the latency on the localisation error, we have measured the position error induced by different latency values using a public driving dataset. More specifically, we have used three highway scenarios from the CommonRoad dataset [35]. The scenarios were partly recorded from real traffic and partly hand-crafted to create challenging situations. The selected scenarios include lane merges and curves to make them more challenging. More information about the selected CommonRoad dataset scenarios can be found in Table 2.
The dataset provides position, velocity, acceleration and heading values of each vehicle recorded at 10 Hz, which is the standard frequency for sending this kind of vehicle data [36]. In this study and based on SAE J2945/1 [37], the receiver estimates the current position of the transmitter vehicle based on the latest received message assuming that the transmitter vehicle is moving at a constant acceleration and heading. For each vehicle position data in the dataset, we have estimated the position after a certain time lapse that would correspond to the message latency. The position error added by the latency is calculated as the Euclidean distance between the vehicle position estimation and the actual position at the time that the message reaches the receiver. This ground truth is obtained by using a quadratic interpolation between the closest points that are part of the dataset.
As specified by the European Committee for Standardization (CEN) and European Committee for Electrotechnical Standardization (CENELEC) [38], positioning accuracy is represented with a set of three statistical values given by the 50th, 75th and 95th percentiles of the cumulative distribution function (CDF) of the position error. The empirical CDF obtained in our study with the datasets of Table 2 is depicted in Figure 2 for latencies in the range of 1 to 100 ms. A latency higher than 100 ms would make impossible the real-time processing of the received data, this being the maximum tolerable latency for vehicle-to-vehicle (V2V) communication [39]. For a latency of 25 ms or below, the error’s 95th percentile is below 5 cm, which is negligible for a localisation problem. With 50 ms latency, the 95th percentile is almost 10 cm, and reaches 18 cm with 100 ms latency. Depending on how close the transmitter vehicle’s positioning measurement errors are to the error bounds, these decimetre level errors added by the network latency can definitely affect to the localisation of the transmitter vehicle in the receiver vehicle’s frame. It is also important to consider that even if the network latency does not increase the localisation error outside of the error bounds, the positioning message needs to be received with enough time in advance to trigger a timely reaction.
3GPP defined some performance requirements in [32] for use cases involving highly automated driving that are supposed to consider all these aspects. The performance requirements are summarised in Table 3. Note that the latency requirements are in line with previous calculations; thus, a latency lower than 50 ms is required by all use cases, and it is much lower for advanced driving and remote driving due to their safety-critical nature and for extended sensors because of the required synchronisation and alignment of perception data coming from different sensors (e.g., video stitching or Lidar point cloud fusion). Extended sensors stands out as the most demanding use case in terms of data rate and communication range. Previous 5G-V2X requirements compiled by 3GPP noted modest data rate requirements for remote driving under the assumption that a vehicle only transmits lightweight processed data [40]. However, more advanced remote driving approaches involve transmission of raw sensor data, so the whole onboard sensor suite can be processed in a remote server. This would of course require some data rate requirements similar to or even more demanding than extended sensors. Advanced driving requires a high transmission rate of 100 messages per second. This is exactly the same recommendation given in [33], derived as the time required between successive localisation updates. Vehicle platooning does not stand out in any of the performance indicators proposed by 3GPP, but the requirements as a whole are still very demanding.
The latency of V2V communication under a LTE network for multi-operator environments with regional split was studied in [41] and a latency of 58 ms was estimated in inter-operator communications without inter-operator handover. In the same work, the inter-operator handover, when vehicles have to detach from one operator and then attach to the other one, was estimated to have 300 ms of latency. It is then clear than enhanced 5G features are required to meet the demanding latency requirements.
To sum up, the identified CAM use cases have demanding performance requirements that cannot be met by LTE infrastructures. This is even more clear in a cross-border context that requires roaming. The following section proposes some implementation options to overcome this issue that exploit features present at 3GPP Release 16 and beyond.
4. Cross-Border Use Case Implementations
The different communication components coming from Section 2 are essential enablers for the use cases described in Section 3, as they play specific roles in the communications pipeline, as described hereafter. Therefore, the Table 4 summarises the relevance of the different communication technologies to meet the requirements of the categorised use cases.
The implementation and deployment aspects of the different 5G features are summarised in Table 5. It includes some overheads to take into account in the development of the CAM service and investment efforts on infrastructures and systems of operators aiming to ease and catalyse the operation of innovative CAM applications in cross-border contexts with multi-domain networks.
In the Figure 3, all the 5G communication technologies come into place for the previously identified use cases, where cross-border context brings further complexity when systems operated by different operators participate.
Specifically, multiple radio technologies expand cellular connectivity and allow the utilisation of the most appropriate option depending on coverage context. Here, mmWave communications are gaining prominence because of their possibilities for infrastructure checkpoints, suitable for public infrastructures, accumulating traffic and serving/consuming spontaneous traffic floods using mmWave bandwidths. Furthermore, satellite communications are intended to augment coverage extension and resilience when managing redundancy on terrestrial and satellite paths. For critical communications, where redundancy could be a must, the duplication of the traffic to be delivered through two available networks enforces the reliability of communication and the exploration of different paths which could get lower latency. Particularly, in the automotive field, the positioning is a key feature where NR advances can improve the accuracy and compensate for the limitations of widely employed geo-position sensors shipped by the connected cars. Then, NR sidelink facilitates opportunistic communication with entities in the surrounding area. It is essential from a business perspective as it enables decentralised communication in areas where ad hoc infrastructure is not available yet. Furthermore, the deployment of advanced techniques which boost handover and roaming is imperative to keeping latency low and realising the communication with external systems, as they are onboard while travelling. In regard to applications or services wherein the audience volume is big, common information awareness is required immediately and explicit acknowledge messaging is not suitable, broadcast and multicast communication turns into a primary option. Widely studied techniques to accommodate traffic demands to network assets and to prioritise specific flows can make the difference when traffic with different severity levels is delivered. Here the harmonisation of different operator policies is a complex challenge. Last but not least, capillarity, zero latency and local privacy from edge computing systems will bring environmental understanding to the next level comprising real-time computer vision and network analysis as a perfect example of incoming service and network symbiosis.
4.1. Advanced Driving
The advanced driving use case involves the participation of different vehicles and infrastructures in order to cooperate and provide information for planning and operating a complex manoeuvre, as depicted in Figure 4. Here, each participant may use a different communication technology. Thus, the interoperability provided by multi-modal/multi-radio technologies of 5G [14] is critical to allow the information exchange from all the surrounding actors. Moreover, sidelink communications such as PC5 C-V2X and 5G NR sidelink [22] add flexibility and versatility enabling data flows between peers once the parties are connected and roles are accepted. As the manoeuvre requires a synchronised response and coordination from vehicles, the network needs to deal with the timely delivery of messages to foster a solid and consistent knowledge at once. Here, the generalied Precision Time Protocol (gPTP) provides reliable time synchronisation as declared in 3GPP TS 23.501 [28]. Furthermore, as the scenario timeframe for such advanced driving use cases is usually small, it is important to minimise communications interruptions and outages while some participants are migrating towards other cells (handover) or other networks (roaming) with low-latency migrations between the network infrastructures.
From the latency perspective, advanced roaming techniques [11] boost the migration of sessions along vehicles, and sidelink communications [22] simplify the protocol to exchange coordination messages to create more direct and quick communication among the surrounding participants. Specifically, roaming techniques get more complex in cross-borders to speed up data sessions across different systems and domains.
Accurate positioning from 5G NR [19] with meter accuracy further enhanced with the next 3GPP releases will bring sub-meter accuracy, and will complement onboard sensor-based measures; multicast networking bridged by FeMBMS (further evolved multimedia broadcast multicast service) technology [24] will ease synchronous data sharing across the manoeuvring participants; and edge computing will provide higher-level vision of the driving situation by gathering data from all the actors in place. Overall, such additional features, could enforce the use case results, adding data accuracy, boosting communications protocols and reducing exchanged messages, thereby gaining efficiency from reduced overheads.
This use case also includes RSUs, V2X communications and multi-PLMN aspects as declared in 3GPP TR 22.886 [40], but it can go beyond by creating of a multi-tier architecture for the server adding edge computing services [11] to provide the advanced driving service with close-to-zero latency and generating summaries and reports for a central server monitoring.
4.2. Vehicle Platooning
The vehicle platooning use case has some similarities with advance driving, but here participants are not just exchanging information to facilitate a safe manoeuvring, as shown in Figure 5. Instead, some participants with a common path enrol in a platoon and receive instructions from the leading vehicle. This use case brings a big challenge in the cross-border domain, as it involves a higher number of actors which will move across different borders and networks. Here, the synchronised acknowledgement among the platoon vehicles and the leader is mandatory, where the gPTP protocol is key to providing reliable time synchronisation as declared in 3GPP TS 23.501 [28], granting a common time base for all participants. This becomes more complex as the membership dynamics need to be managed by the platoon, for example, when a vehicle joins or leaves the platoon, requiring the re-arrangement of the vehicles. In order to ease the communication between the platoon vehicles and to keep the connection alive, the sidelink communications, such as PC5 C-V2X and 5G NR sidelink [22], play a significant role. Furthermore, the multicast communications minimise the potential inconsistencies for a common awareness distribution when sharing information along the platoon. Here, FeMBMS technology and the advances to include feedback in the next releases [24] will facilitate information sharing and actuation coordination. The multicast communications would also simplify the platooning protocol, reducing overheads. Last, the mid/long distance covered makes this use case more prone to failures, that is, communications interruptions when performing cell handover or cross-border roaming, requiring low-latency and reliable performance.
From the latency perspective, advanced roaming techniques [11] and sidelink communications [22] make again the difference. Furthermore, broadcast and multicast [24] help to simplify coordination messaging by removing acknowledgement and clock messaging for common shared information while granting distributed awareness at once. Ensuring consistent timing and synchronous distribution of messages [28] for broadcasting gets intricate in cross-borders where different systems operate by different operators with shifted time zones get place.
Additionally, the same benefits from extra features apply. Accurate positioning of 5G NR [19] complements onboard sensor-based measures; edge computing [11] provides a higher level vision of the driving situation, gathering data from all the members in place and the QoS management of the traffic from a platoon when managing co-located services. The network slicing techniques [29] provisioning virtual/logical network assets devoted to specific traffic and isolating the performance from concurrent traffic flows could reinforce the use case results, adding data accuracy while enabling cost–performance trade-offs.
This use case embraces RSUs, V2V and broadcast/multi-cast communications as proposed in [40]. Furthermore, part of the processing load and the clustering of information to the platoon’s region of interest can be managed by the edge computing infrastructures to gain scalability.
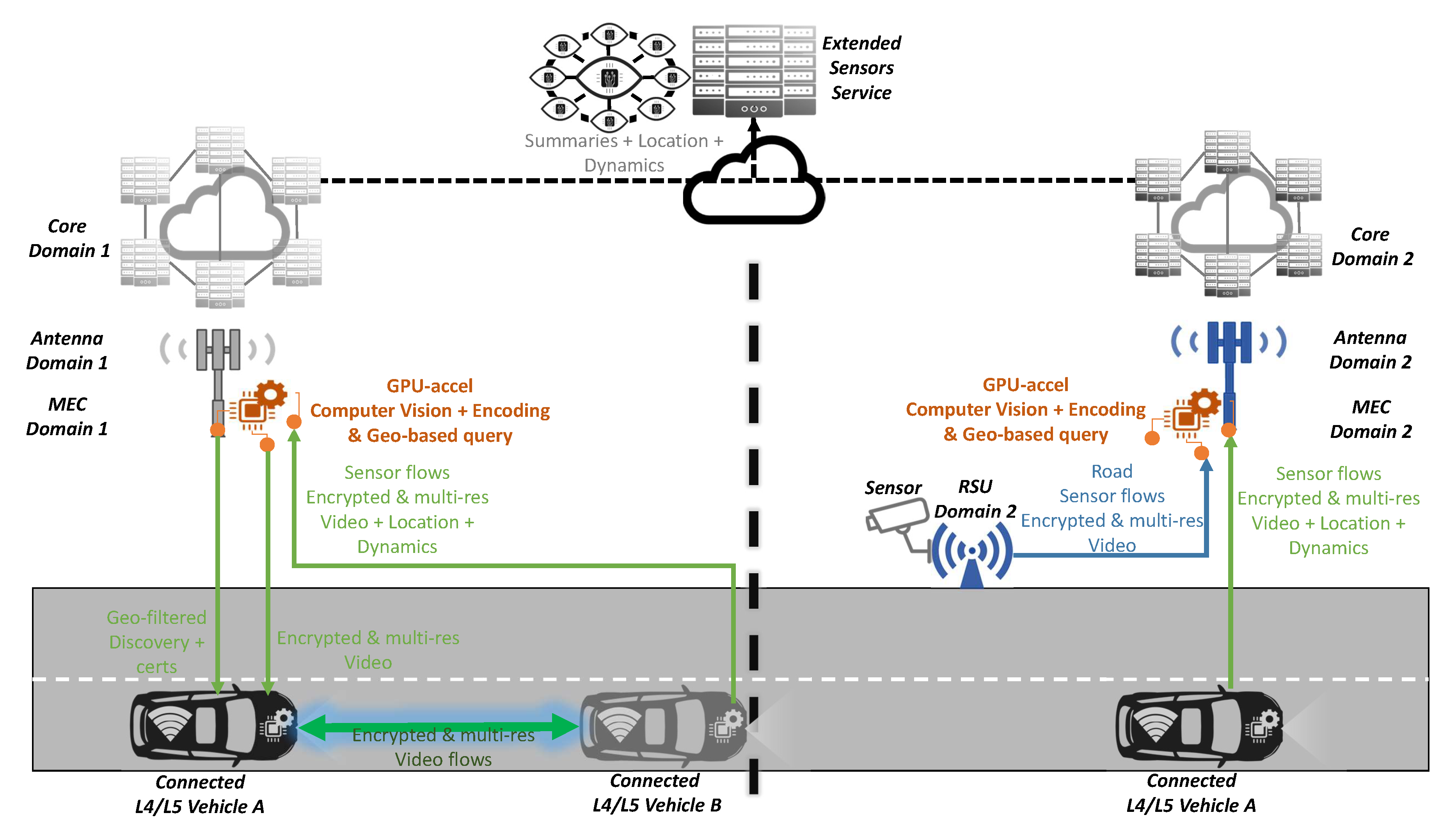
4.3. Extended Sensors
“Extended sensors” aims to expand data and environmental knowledge with information coming from sensors from surrounding systems such as RSUs or vehicles, as illustrated in Figure 6. The heterogeneity on the network interfaces of different systems makes multi-radio [14] support necessary. Once the discovery protocol has been performed and the handshake between the data source and consumer is done, the sidelink communications, such as PC5 C-V2X and 5G NR sidelink [22], allow peers to communicate without management overheads from the network infrastructure. Here, specifically the edge computing architecture [11] makes the difference, as the overheads for onboard computing resources can be offloaded to edge processing resources compiling, filtering and processing the raw data from vehicles to provide onboard systems with trusted and relevant metadata to be used by the onboard driving systems.
From the latency perspective, sidelink communications [22] make participant communications more direct and quicker. Furthermore, zero latency of edge computing enabled services [11] will bring environmental understanding closer to the users empowering systems shipped at the vehicles with more additional sensor sources. Specifically, edge services linked to discovery and security can boost quality negotiation, selection of region of interest and credentials exchange with an edge entity with a higher standing point to manage configurations according to coordination policies and local performance context, including radio link congestion or vehicles’ computation capacity. In a cross-border context, the utilisation of different edge providers would need common and standard protocol stacks and formats to ensure that common APIs and seamless service provisioning could be done, decoupling services from sensors and infrastructure vendors.
Again, features such as positioning of 5G NR [19], based on the use of a location server similar to LTE, may help to improve accuracy from sensors. This architecture-wise technique employs a positioning reference signal (PRS) for the downlink-positioning, correlating the time of arrival (ToA) and sounding reference signals (SRSs) for the uplink-positioning, estimating the received power, the angle of arrival and the round-trip time (RTT). Moreover, broadcast and multicast communications [40] could ease the discovery protocol of the available sensors, especially as singular video streams from sensors ahead are repeatedly subscribed by vehicles at the back. In any case, here, the speed and reliability of network handover and roaming are not so critical, as the onboard driving systems must be autonomous and the goal is to find and consume potentially relevant data streams from outside the vehicle.
For the QoS slicing feature it is important here to include processing features of the video stream destination to match the data source, not only with the network performance as described in [40], but also with the computation capacity of the vehicle consuming a data flow.
4.4. Remote Driving
In this use case the volume of information sent to the operator is big; the latency of remote actions must be low; the accuracy of positioning is helpful, especially for high speeds; and the reliability and stability of communications are essential to ensure continuous control. To this end, the multi-modal/multi-radio communications [14] are key to operate through an appropriate radio access when the coverage of some of them falls, as presented in Figure 7. Furthermore, the QoS slicing mechanisms [29] can ensure a minimal QoS to allow a coarse-grained environmental view yet a practical one. This use case brings main aspects from mission-critical communications, where the availability of a network slice isolates traffic avoiding bottlenecks or transitory outages potentially introduced by other services or applications. In any case, quick and seamless network handover and roaming are mandatory.
From the latency perspective, the utilisation of multiple radio technologies is crucial to providing substitute connectivity when cellular radio technology violates the latency threshold. This manner, cellular coverage is augmented through alternatives and 5G vision aims to embrace heterogeneous technologies and contexts [14] with a roadmap to merge technologies in public and private networks and bands. In this regard, network management tools to operate network slicing are also essential to ensure that critical operations are prioritised to other traffic [29]. The harmonisation of the provided slice in a multi-domain infrastructure is especially complicated in cross-border contexts, where each operator deploys its own policies and technology stack to monitor and control the network setup.
In this case, sidelink communications are not required as the communication is between the cloud service and the controlled vehicle. The broadcast and multicast communications have no use for this pure unicast data flow. However, in this V2N scenario, a multi-SIM approach would be very valuable [17]. If one PLMN fails, the other one can be used in order to ensure the continuity of the remote driving service. In contrast to the rest of use cases, this use case has no V2V or vehicle-to-infrastructure (V2I) element and depends only on V2N, so the whole use case would be disabled in cases wherein the link with the network fails. Edge computing does not play a key role, as no processing tasks need to be offloaded from vehicles or cloud services to the edge.
4.5. Vehicle QoS Support
This use case is transverse and intrinsically related to compensate network issues by finding new ways to complement or substitute the under-performing radio link, as rendered in Figure 8. Thus, multi-radio [14] communications, broadcast and multicast [24] flows, mmWave [27] spectrum bands and network analysis at local edge [11] will lead to QoS slicing [29], ensuring a seamless and steady QoS. Even if it is not key, a multi-SIM [17] support would also be interesting to increase the reliability of the service.
From the latency perspective, as this use case is transverse, the manner that multi-radio, broadcast and network slicing technologies may help to reduce the use case latency was already described.
This use case is wider in terms of multi-modal communications, adding satellite communications—for widening coverage—mmWave communications, to increase bandwidths in a short-range area and vehicle traffic tethering, allowing a vehicle to act as a gateway for another vehicle connected through V2V connection.
5. Conclusions and Open Issues
In this paper we gave an overview the different 5G features from Release 16 and 17 that will be key to enabling or boosting use cases of the CAM domain, specifically in the context of cross-borders. To this end, we took advanced CAM use cases targeted in 3GPP documents and put them into the cross-border context to identify further communication requirements. Then, we analysed the roles and relevance of identified 5G features to meet CAM requirements, such as: low-latency roaming to ensure service continuity; multi-radio communications to gain interoperability of cross-border networks; multi-SIM connectivity to increase reliability when crossing a border; NR positioning to enhance localisation accuracy and mitigate localisation errors induced by roaming latency; sidelink to further enable distributed architectures; broadcast modes to efficiently share common data; mmWave to expand radio capacity; network slicing to book resources to ensure QoS; and edge computing to deploy a scalable infrastructure. This paper presents a 5G deployment option for CAM over a terrestrial network inspired by the work done in 5G-MOBIX, where other options like satellite communication are also considered.
However, there are some open issues not covered in ongoing discussions and working documents of 3GPP. Firstly, there is a lack of standard MEC APIs to manage the servicing lifecycle, from release and deployment to operation and management. In a cross-border context this would mean extra and manual work to deploy a MEC service on a network and migrating or cloning it to another one. Moreover, a seamless MEC handover mechanism is also lacking. The MEC system should have a standard mechanism to transfer the session data to the following MEC node as the devices physically navigate along them, including MEC nodes located in different PLMNs.
As shown in Section 3, the latency of the V2X messages is critical. In a cross-border context, the roaming adds even more latency and makes the timely delivery of messages to a set of distributed systems very challenging, complicating a common understanding and creating inconsistencies and conflicts. In Ethernet networks, where there is no roaming at all, this is addressed by applying time-sensitive networking standards that ensure bounded latency instead of a best-effort approach. However, wireless networks behave differently from wired links, due to device mobility and the intrinsic characteristics of the physical layer. This paper already proposes some options to minimise latency problems by using 5G technologies such as slicing, edge computing or mmWave communications. Nevertheless, a standard strategy for resource overprovisioning and traffic congestion prediction and management can help mitigate this problem even more.
From the business feasibility perspective, the deployment and exploitation options of 5G in cross-border corridors should be studied further. Several aspects need to be considered for a successful deployment of 5G for CAM, such as the base station and MEC density or the backhaul provision. Cost reduction solutions are also necessary that promote infrastructure sharing, and exploit cooperative models between the automotive industry, mobile network operators, road operators and new players such as cloud or edge service providers.
Author Contributions
Conceptualization, G.V., Á.M., G.P. and E.M.; formal analysis, G.V. and Á.M.; investigation, G.V., Á.M., G.P. and E.M.; writing—original draft preparation, G.V., Á.M., G.P. and E.M.; writing—review and editing, G.V., Á.M., G.P. and E.M.; visualization, G.V. and Á.M.; supervision, G.V. All authors have read and agreed to the published version of the manuscript.
Funding
This work is a part of the 5G-MOBIX project. This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement number 825496. Content reflects only the authors’ view and European Commission is not responsible for any use that may be made of the information it contains.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| 3GPP | Third-Generation Partnership Project |
| API | Application Programming Interface |
| C-V2X | Cellular Vehicle-to-Everything |
| CAM | Connected Automated Mobility |
| CDF | Cumulative Distribution Function |
| CEN | European Committee for Standardisation |
| CENELEC | European Committee for Electrotechnical Standardisation |
| CP-SOR | Control Plane Steering of Roaming |
| DL | Downlink |
| DSRC | Dedicated Short Range Spectrum |
| eMBB | enhanced Mobile Broadband |
| FR | Frequency Range |
| GHz | Gigahertz |
| gNB | gNodeB |
| GNSS | Global Navigation Satellite System |
| GPU | Graphics Processing Unit |
| IEEE | Institute of Electrical and Electronics Engineers |
| L4 | Level 4 |
| L5 | Level 5 |
| LTE | Long Term Evolution |
| MAC | Medium Access Control |
| MEC | Multi-access Edge Computing |
| MHz | Megahertz |
| MIoT | Massive Internet of Things |
| mmWave | millimetre Wave |
| MR-DC | Multi-Radio Dual Connectivity |
| NR | New Radio |
| OBU | On-Board Unit |
| PHY | Physical Layer |
| PLMN | Public Land Mobile Network |
| QoS | Quality of Service |
| RAT | Radio Access Technology |
| Rel-14 | Release 14 |
| Rel-15 | Release 15 |
| Rel-16 | Release 16 |
| Rel-17 | Release 17 |
| RSU | Road Side Unit |
| SAE | Society of Automotive Engineers |
| SD | Slice Differentiator |
| SIM | Subscriber Identity Module |
| SME | Small and Medium-sized Enterprises |
| SST | Slice/Service Types |
| TR | Technical Report |
| UE | User Equipment |
| UL | Uplink |
| URLLC | Ultra Reliable Low Latency Communications |
| V2I | Vehicle-to-Infrastructure) |
| V2N | Vehicle-to-Network |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
| VVLC | Vehicular Visible Light Communication |
References
- Zeadally, S.; Javed, M.A.; Hamida, E.B. Vehicular Communications for ITS: Standardization and Challenges. IEEE Commun. Stand. Mag. 2020, 4, 11–17. [Google Scholar] [CrossRef]
- Abou-zeid, H.; Pervez, F.; Adinoyi, A.; Aljlayl, M.; Yanikomeroglu, H. Cellular V2X Transmission for Connected and Autonomous Vehicles Standardization, Applications, and Enabling Technologies. IEEE Consum. Electron. Mag. 2019, 8, 91–98. [Google Scholar] [CrossRef]
- Jung, C.; Lee, D.; Lee, S.; Shim, D.H. V2X-Communication-Aided Autonomous Driving: System Design and Experimental Validation. Sensors 2020, 20, 2903. [Google Scholar] [CrossRef] [PubMed]
- Boban, M.; Kousaridas, A.; Manolakis, K.; Eichinger, J.; Xu, W. Connected Roads of the Future: Use Cases, Requirements, and Design Considerations for Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2018, 13, 110–123. [Google Scholar] [CrossRef]
- Lema, M.A.; Laya, A.; Mahmoodi, T.; Cuevas, M.; Sachs, J.; Markendahl, J.; Dohler, M. Business Case and Technology Analysis for 5G Low Latency Applications. IEEE Access 2017, 5, 5917–5935. [Google Scholar] [CrossRef] [Green Version]
- Fallgren, M.; Dillinger, M.; Alonso-Zarate, J.; Boban, M.; Abbas, T.; Manolakis, K.; Mahmoodi, T.; Svensson, T.; Laya, A.; Vilalta, R. Fifth-Generation Technologies for the Connected Car: Capable Systems for Vehicle-to-Anything Communications. IEEE Veh. Technol. Mag. 2018, 13, 28–38. [Google Scholar] [CrossRef]
- 5G-PPP. Business Feasibility Study for 5G V2X Deployment; Version 2; White Paper; 5G-PPP Automotive Working Group: Brussels, Belgium, 2019. [Google Scholar]
- Dang, S.; Amin, O.; Shihada, B.; Alouini, M. What should 6G be? Nat. Electron. 2020, 3, 20–29. [Google Scholar] [CrossRef] [Green Version]
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef] [Green Version]
- 5G-MOBIX. Available online: https://www.5g-mobix.com/ (accessed on 27 August 2020).
- Ghosh, A.; Maeder, A.; Baker, M.; Chandramouli, D. 5G Evolution: A View on 5G Cellular Technology Beyond 3GPP Release 15. IEEE Access 2019, 7, 127639–127651. [Google Scholar] [CrossRef]
- 3GPP. Service Accessibility; Version 17.0.0; Technical Specification (TS)) 22.011; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- Sepulcre, M.; Gozalvez, J. Heterogeneous V2V Communications in Multi-Link and Multi-RAT Vehicular Networks. IEEE Trans. Mob. Comput. 2019. [Google Scholar] [CrossRef] [Green Version]
- Ericsson. Revised WID: Multi-RAT Dual-Connectivity and Carrier Aggregation Enhancements; 3GPP Work Item Description RP-1922336; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- Evans, B.; Onireti, O.; Spathopoulos, T.; Imran, M.A. The role of satellites in 5G. In Proceedings of the 2015 23rd European Signal Processing Conference (EUSIPCO), Nice, France, 31 August–4 September 2015; pp. 2756–2760. [Google Scholar]
- Giambene, G.; Kota, S.; Pillai, P. Satellite-5G Integration: A Network Perspective. IEEE Netw. 2018, 32, 25–31. [Google Scholar] [CrossRef]
- Vivo.; China Telecom.; China Unicom. New WID: Support for Multi-SIM Devices in Rel-17; 3GPP Work Item Description RP-193263; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- Cui, X.; Gulliver, T.A.; Li, J.; Zhang, H. Vehicle Positioning Using 5G Millimeter-Wave Systems. IEEE Access 2016, 4, 6964–6973. [Google Scholar] [CrossRef]
- 3GPP. NG Radio Access Network (NG-RAN); Stage 2 Functional Specification of User Equipment (UE) Positioning in NG-RAN; Version 16.1.0; Technical Specification (TS)) 38.305; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2020. [Google Scholar]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Hirai, T.; Murase, T. Performance Evaluations of PC5-based Cellular-V2X Mode 4 for Feasibility Analysis of Driver Assistance Systems with Crash Warning. Sensors 2020, 20, 2950. [Google Scholar] [CrossRef] [PubMed]
- LG Electronics. Revised WID on 5G V2X with NR Sidelink; 3GPP Work Item Description RP-190984; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- Fallgren, M.; Abbas, T.; Allio, S.; Alonso-Zarate, J.; Fodor, G.; Gallo, L.; Kousaridas, A.; Li, Y.; Li, Z.; Li, Z.; et al. Multicast and Broadcast Enablers for High-Performing Cellular V2X Systems. IEEE Trans. Broadcast. 2019, 65, 454–463. [Google Scholar] [CrossRef]
- 3GPP. Overall Description of LTE-Based 5G Broadcast; Version 16.0.0; Technical Report (TR) 36.976; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2020. [Google Scholar]
- Lien, S.; Kuo, Y.; Deng, D.; Tsai, H.; Vinel, A.; Benslimane, A. Latency-Optimal mmWave Radio Access for V2X Supporting Next Generation Driving Use Cases. IEEE Access 2019, 7, 6782–6795. [Google Scholar] [CrossRef]
- He, R.; Ai, B.; Wang, G.; Zhong, Z.; Schneider, C.; Dupleich, D.A.; Thomae, R.S.; Boban, M.; Luo, J.; Zhang, Y. Propagation Channels of 5G Millimeter-Wave Vehicle-to-Vehicle Communications: Recent Advances and Future Challenges. IEEE Veh. Technol. Mag. 2020, 15, 16–26. [Google Scholar] [CrossRef]
- Vivo.; China Telecom.; China Unicom. Study on Supporting NR from 52.6 GHz to 71 GHz; 3GPP Work Item Description RP-193263; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- 3GPP. System Architecture for the 5G System (5GS); Version 16.3.0; Technical Specification (TS) 23.501; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- 3GPP. Study on Enhancement of Network Slicing; Version 16.0.0; Technical Report (TR) 23.740; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2018. [Google Scholar]
- Zhou, Z.; Feng, J.; Chang, Z.; Shen, X. Energy-Efficient Edge Computing Service Provisioning for Vehicular Networks: A Consensus ADMM Approach. IEEE Trans. Veh. Technol. 2019, 68, 5087–5099. [Google Scholar] [CrossRef]
- Yang, S.; Su, Y.; Chang, Y.; Hung, H. Short-Term Traffic Prediction for Edge Computing-Enhanced Autonomous and Connected Cars. IEEE Trans. Veh. Technol. 2019, 68, 3140–3153. [Google Scholar] [CrossRef]
- 3GPP. Enhancement of 3GPP Support for V2X Scenarios; Version 16.2.0; Technical Specification (TS) 22.186; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- Reid, T.G.; Houts, S.E.; Cammarata, R.; Mills, G.; Agarwal, S.; Vora, A.; Pandey, G. Localization Requirements for Autonomous Vehicles. SAE Int. J. Connect. Autom. Veh. 2019, 2, 173–190. [Google Scholar] [CrossRef] [Green Version]
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A Survey of the State-of-the-Art Localization Techniques and Their Potentials for Autonomous Vehicle Applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Althoff, M.; Koschi, M.; Manzinger, S. CommonRoad: Composable benchmarks for motion planning on roads. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 719–726. [Google Scholar]
- ETSI. Vehicular Communications, Basic Set of Applications: Analysis of the Collective Perception Service (CPS) Release 2; Version 2.1.1; Technical Report (TR) 103 562; European Telecommunications Standards Institute (ETSI): Valbonne - Sophia Antipolis, France, 2019. [Google Scholar]
- SAE. On-Board System Requirements for V2V Safety Communications; Standard J2945/1; SAE International: Troy, MI, USA, 2020. [Google Scholar]
- CEN-CENELEC. Use of GNSS-Based Positioning for Road Intelligent Transport Systems (ITS). Definitions and System Engineering Procedures for the Establishment and Assessment of Performances; Standard PR EN 16803-1; CEN-CENELEC: Brussels, Belgium, 2016. [Google Scholar]
- Yang, H.; Zheng, K.; Zhang, K.; Mei, J.; Qian, Y. Ultra-Reliable and Low-Latency Communications for Connected Vehicles: Challenges and Solutions. IEEE Netw. 2020, 34, 92–100. [Google Scholar] [CrossRef]
- 3GPP. Study on Enhancement of 3GPP Support for 5G V2X Services; Version 16.2.0; Technical Report (TR) 22.886; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2018. [Google Scholar]
- Martin-Sacristan, D.; Roger, S.; Garcia-Roger, D.; Monserrat, J.F.; Spapis, P.; Zhou, C.; Kaloxylos, A. Low-Latency Infrastructure-Based Cellular V2V Communications for Multi-Operator Environments With Regional Split. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
Figure 1.
Left to right in the figure: (1) Actual position of the vehicle when the message is sent (). (2) Position estimated by the onboard positioning system. This is the position communicated. Note that there is a longitudinal error. (3) Actual position of the vehicle at . This is the instant in time that the message is received by another vehicle. There is a error caused by the network latency. The receiver needs to deal with a offset.
Figure 1.
Left to right in the figure: (1) Actual position of the vehicle when the message is sent (). (2) Position estimated by the onboard positioning system. This is the position communicated. Note that there is a longitudinal error. (3) Actual position of the vehicle at . This is the instant in time that the message is received by another vehicle. There is a error caused by the network latency. The receiver needs to deal with a offset.

Figure 2.
Cumulative distribution function of the positioning error added by the latency in a highway scenario.
Figure 2.
Cumulative distribution function of the positioning error added by the latency in a highway scenario.

Figure 3.
General scenario of the proposed solution.

Figure 4.
Advanced driving scenario of the proposed solution.

Figure 5.
Platooning scenario of the proposed solution.

Figure 6.
Extended sensors scenario of the proposed solution.

Figure 7.
Remote driving scenario of the proposed solution.

Figure 8.
Quality of experience scenario of the proposed solution.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Added value brought by 5G technologies to cross-border connected automated mobility (CAM) services.
Table 1.
Added value brought by 5G technologies to cross-border connected automated mobility (CAM) services.
| 5G Technology | Reference | Added Value |
|---|---|---|
| Roaming | [11] | Service continuity in cross-border contexts. |
| Multi-Radio | [14] | Increased interoperability by supporting |
| multiple RATs of cross-border networks. | ||
| Multi-SIM | [17] | Increased reliability while crossing the border |
| based on SIM redundancy. | ||
| NR positioning | [19] | Increased positioning accuracy, complementing current sensors |
| and mitigating the positioning error induced by roaming latency. | ||
| NR sidelink | [22] | Nearby device-to-device communication |
| without the need of a base station. | ||
| Broadcast & | [24] | Improved resource efficiency compared to unicast |
| multicast | for transmitting common data of interest. | |
| mmWave comm. | [27] | Expanded radio capacity. Gigabit-per-second transmission rates. |
| Slicing | [29] | Dedicated slice to support the requirements |
| of a particular cross-border CAM service. | ||
| Edge | [11] | Offloading computing loads to vehicular edge computing nodes |
| Computing | via vehicle-to-infrastructure links. |
Table 2.
CommonRoad dataset scenarios used to study the effect of latency in the positioning error.
| Scenario Name | Scenario Class | Duration (s) | Number of Dynamic Vehicles |
|---|---|---|---|
| CHN_Cho-2_8_T-1 | Highway | 15.0 | 26 |
| CHN_Cho-2_10_T-1 | Highway | 16.5 | 18 |
| DEU_Stu-1_5_T-1 | Highway | 16.0 | 22 |
Table 3.
Performance requirements for highly automated use cases according to 3GPP TS 22.186 [32].
Table 3.
Performance requirements for highly automated use cases according to 3GPP TS 22.186 [32].
| Max e2e | ||||||
|---|---|---|---|---|---|---|
| Payload | Tx Rate | Latency | Reliability | Data Rate | Comm. Range | |
| Use Case | (Bytes) | (message/sec) | (ms) | (%) | (Mbps) | (m) |
| Advanced Driving | 2000–12,000 | 100 | 3–10 | 99.999 | 30–53 | 500 |
| Vehicle Platooning | 50–1200 | 30 | 10 | 99.99 | 50–65 | 80–350 |
| Extended Sensors | - | - | 3–50 | 99–99.999 | 10–1000 | 1000 |
| Remote Driving | - | - | 5 | 99.999 | 25(UL)/1(DL) | - |
Table 4.
A qualitative assessment of the relevance of communication technology to support use cases in cross-border contexts.
Table 4.
A qualitative assessment of the relevance of communication technology to support use cases in cross-border contexts.
| Advanced | Vehicles | Extended | Remote | QoS | |
|---|---|---|---|---|---|
| 5G Technology | Driving | Platooning | Sensors | Driving | Support |
| Roaming | ✓✓ | ✓✓ | ✓ | ✓✓ | ✓ |
| Multi-radio comms. | ✓✓ | – | ✓✓ | ✓✓ | ✓✓ |
| Multi-SIM | – | – | – | ✓✓ | ✓ |
| NR Positioning | ✓ | ✓ | ✓ | ✓✓ | – |
| NR sidelink | ✓✓ | ✓✓ | ✓✓ | – | – |
| Broadcast & multicast | ✓ | ✓✓ | ✓ | – | ✓✓ |
| mmWave comms. | – | – | – | – | ✓✓ |
| Network slicing | ✓ | ✓ | ✓ | ✓✓ | ✓✓ |
| Edge computing | ✓ | ✓ | ✓✓ | – | – |
✓✓ The technology is key for the use case’s requirements. ✓The technology is relevant for the use case’s requirements. —The technology is not required to support the use case.
Table 5.
Implementation and deployment aspects of 5G technologies in cross-border CAM services.
| 5G Technology | Implementation | Deployment |
|---|---|---|
| Roaming | Availability of common APIs | Continuity on IP address |
| Multi-radio | Aggregate traffic | Multiple network interfaces |
| Transform across radio technologies | Dedicated infrastructure | |
| Multi-SIM | Perform techniques for payload merge | Accurate clock distribution |
| and payload discard based on timestamps | technique granting common time basis | |
| NR positioning | Apply sync to clock and timestamp signalling | Dedicated infrastructure |
| Local master/slave clocks | Hierarchical clock sync setup | |
| NR Sidelink | Manage discovery | Edge system to boost discovery |
| Negotiate handshake & security | Edge system to enable trust | |
| Broadcast & | Employ compatible UE | Aggregate dedicated system |
| multicast | Remove dependency on feedback messages | to the Base Stations |
| mmWave comm. | High-performance bus | High-throughput equipment |
| High-capacity storage | High-capacity cache | |
| Employ compatible UE | Short-range deployment | |
| Slicing | Policies implementation | Policies harmonisation across domains |
| Interfacing provisioning/virtualization system | Open 3rd party APIs | |
| Edge | Mobility-based session continuity | Listen neighbour activity updates |
| Computing | Geo-parcelling for instance subscription | Geo-pinned deployment |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Velez, G.; Martín, Á.; Pastor, G.; Mutafungwa, E. 5G Beyond 3GPP Release 15 for Connected Automated Mobility in Cross-Border Contexts. Sensors 2020, 20, 6622. https://doi.org/10.3390/s20226622
AMA Style
Velez G, Martín Á, Pastor G, Mutafungwa E. 5G Beyond 3GPP Release 15 for Connected Automated Mobility in Cross-Border Contexts. Sensors. 2020; 20(22):6622. https://doi.org/10.3390/s20226622
Chicago/Turabian StyleVelez, Gorka, Ángel Martín, Giancarlo Pastor, and Edward Mutafungwa. 2020. "5G Beyond 3GPP Release 15 for Connected Automated Mobility in Cross-Border Contexts" Sensors 20, no. 22: 6622. https://doi.org/10.3390/s20226622
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.