1. Introduction
Hand function plays a fundamental role in the activities of daily living. The ability to manipulate everyday objects requires complex hand movements, such as grasping, touching, and lifting [
1]. Factors associated with ageing and chronic diseases (e.g., rheumatoid arthritis [
2] and stroke [
3]) may contribute to a reduction in hand dexterity, grip strength, and the general range of motion needed for completing daily activities [
4,
5,
6].
In a clinical setting, several standard tests are available to evaluate the decline or recovery of functions of the hand and upper extremity, such as the Fugl-Meyer assessment (FMA) [
7], Wolf motor function test (WMFT) [
8], and box and block test (BBT) [
9,
10,
11]. Some of the tests, such as the BBT and Purdue Pegboard Test, have been specifically devised to explore gross- and fine-motor hand functions required in object manipulation. For instance, the BBT focuses on hand dexterity with simple and repetitive tasks consisting of grasping, transporting, and releasing small blocks [
9]. A modified version, the targeted BBT (tBBT), is characterised by more closely modelled common real-world object manipulation for controlling precision aiming [
12]. To date, recent advancements in virtual reality and sensing technologies have contributed to improving the sensitivity, automation, and accessibility of the BBT. Examples include digital BBT (dBBT) with depth camera detections [
13] and a haptic-combined virtual reality BBT [
14].
The aforementioned studies provide a useful measure of the overall performance of hand movement in the sense that they mainly utilise temporal measures during task performance (e.g., the time required to transport the blocks in tBBT). However, limited investigations have been reported on the kinematic parameters of hand movements.
The human hand is remarkably complex, comprising 27 bones that are controlled by 39 muscles [
15]. During the course of the hand movement, an active range of motion (RoM) of the joints in the fingers, wrist, and forearm are generated.
Figure 1 shows the RoMs of the hand flexion/extension, wrist flexion/extension, and radial/ulnar flexion. In particular, extension and flexion of the thumb and index finger joints are important to grasp objects in daily activities [
16].
The kinematic analysis of hand movement relies on two main approaches: optical-based [
17,
18] and sensor-based [
19,
20,
21,
22] systems. Optical systems (e.g., Vicon or Optotrak) offer a high tracking accuracy and are often regarded as the gold standard in motion analysis [
22]. However, the systems can be restricted to assess fine-motor joint movements, such as the fingers, because they are highly sensitive to alterations in the set-up, relating to marker placements, illuminations, and spatial conditions, which require considerable costs and expertise [
20].
Recently, the advent of sensors and wireless communications have expedited kinematic measurements of hand movements. Connolly et al. [
19] developed a wireless smart glove system to assess the deficiency of hand movements in patients with rheumatoid arthritis. The system uses multiple inertial measurement units (IMUs) placed on a stretchable, wearable glove and measures the joint angles and velocities of the finger and thumb movements in dynamic hand use conditions. Salchow-Hömmen et al. [
20] investigated the measures of finger segment orientation and fingertip positions to better track and quantify the motion of the hand and its interaction with objects. With ergonomic considerations and new estimation algorithms of the system, an IMU-based modular hand sensor system was devised. However, they evaluated the system with simple object manipulation tasks, such as pinching and grasping wooden blocks, which are not realistic scenarios or standardised tasks. Lin et al. [
21] further introduced a sensorised glove with IMUs and force-sensing resistors. Measuring hand kinematics and fingertip force together can yield additional information. In particular, when dealing with tasks related to grasping or lifting an object, the force sensors that must be worn on the fingertips are bulky and lead to inaccuracy with the motor-impaired hand.
Despite the growing popularity of IMU-based wearable systems for hand function evaluation, several limitations have hindered their applicability in clinical settings. First, previous studies lack empirical validity, relying on basic tasks with no connections to standard hand performance tests and a small number of subjects (e.g., two and four subjects participated in the empirical study of [
21] and [
20], respectively). Second, although several efforts have been made to reduce the dimensions and weights of IMU-based wearable systems [
20], undesirable contacts and tangled wires observed in numerous glove- or band-type systems are still problematic. The system is considered cumbersome and limits the ability to naturally perform hand-object interactions. Furthermore, considering that chronic diseases—stroke and arthritis—are likely to be accompanied by hand joint inflammation and deformity, current non-customizable wearable systems report critical limitations for use in the clinical environment.
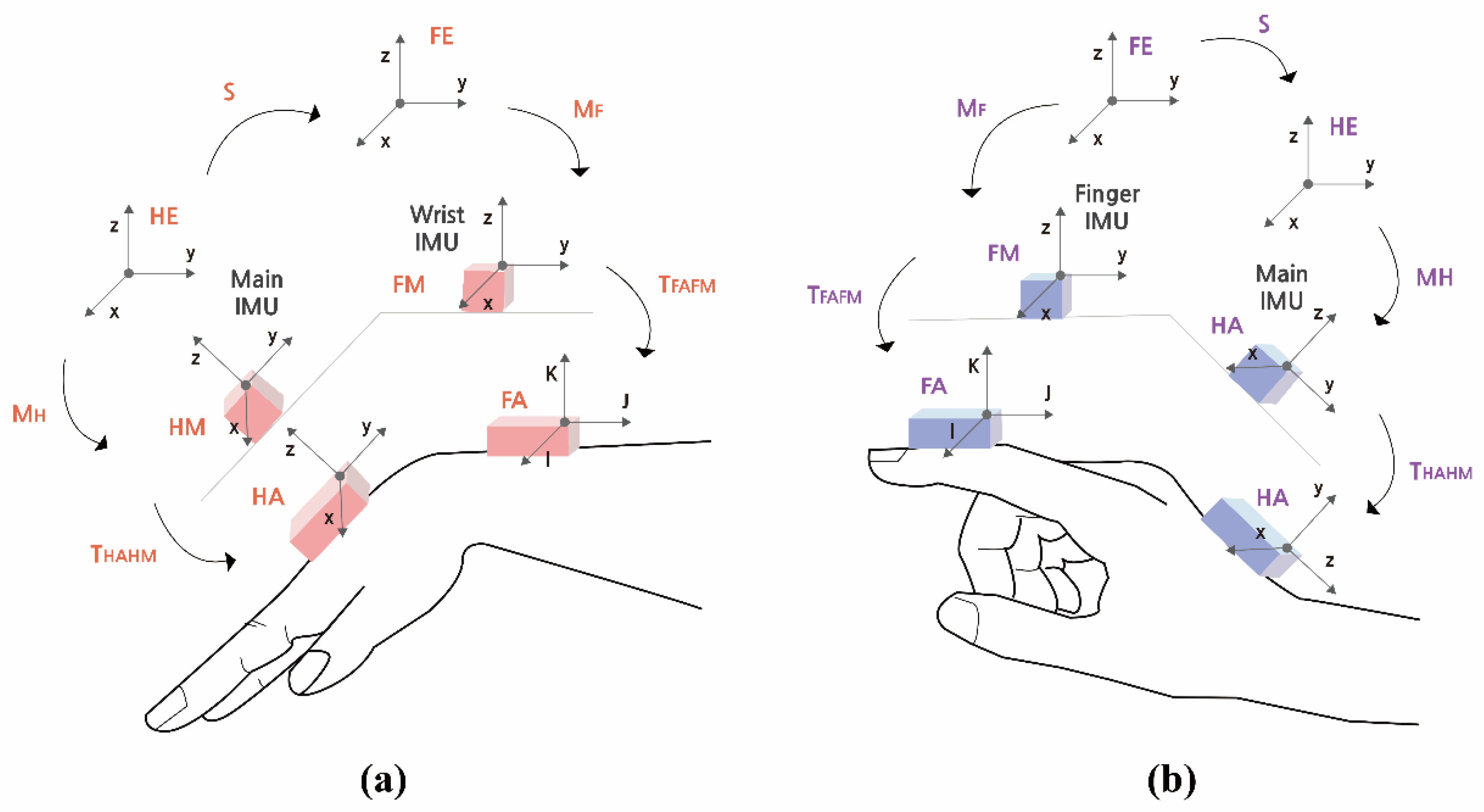
In this regard, the aim of this study was three-fold. The first aim was to propose a novel clip-on IMU system that is applied to the fingers and wrists. We considered ergonomic aspects to fit diverse hand dimensions and deformations. In addition, a light modular design can sense target finger movement selectively with minimum contact on the bare hand to avoid possible disruptions in hand-object manipulation. The second aim was to determine the performance and kinematic parameters derived from the proposed system to assess fine-motor hand functions. Although previous sensor-based approaches attempted to identify specific kinematic parameters of hand movement, including assessment of angular velocity and RoMs, current clinical hand assessments still resort to temporal measures during the performance of a task (e.g., average time to execute). Thus, this study aimed to investigate the integrative approach of assessing hand functions in clinically relevant conditions, which relates to the third aim of the study. Finally, we aimed to better characterise age-related differences with regard to the performance and kinematics of hand functions using a standard hand dexterity test, the tBBT. The tBBT is a performance outcome measure of hand dexterity introduced by Kontson et al. [
12], which models real-world object manipulation scenarios well.
5. Discussion
5.1. Novel Clip-On IMU System for Fine-Motor Hand Function Assessment
This study proposed a novel clip-on IMU system that can be applied to the fingers and wrist and provides a comprehensive understanding of fine-motor hand function. The development of the clip-on IMU system presented in the study focussed on three design features: customisation, flexibility, and extensibility. The customisable clip-type design can be fitted regardless of hand dimensions, inflammation, and deformity of the joints. Each clip is manufactured using a stretchable, flexible material that yields extra comfort and minimum disruptions to perform hand-object manipulation. There are two substantial benefits for clinical use settings. One is to target patients with a broad spectrum of conditions affecting the hand and wrist, such as rheumatoid arthritis, other inflammatory arthropathies, and age-related dexterity declines. The other is to reduce the impact of the system on hand movements, while preserving the sense of touch.
Similarly, earlier studies have addressed issues related to the flexibility and practicability of the sensorised glove systems for use in the clinical environment. The glove proposed by Connolly et al. [
19] was designed to help quantify the RoMs of each finger joint and monitor patient progression during the arthritis rehabilitation process. Despite their attempts to construct stretchable printed circuit boards for a flexible glove, the glove type was bulky as it covered the entire hand and was incapable of the sense of touch. An experimental validation was not conducted in the context of hand-object manipulation. Lin et al. [
21] further combined the IMUs with force-sensing sensors to accurately measure hand–object interactions. Providing kinematic data and fingertip force yields additional information when patients conduct hand-object manipulation tasks. These advanced features have substantial benefits for assisting in the clinical environment. There are challenges with regard to the trade-off between a compact design and functionality. Unlike gloves, Salchow-Hömmen et al. [
20] attempted to preserve a full sense of touch by placing mini-IMU sensors on the back of the hand and fingers, which are fixed with skin-friendly tape. This design feature resulted in a weight reduction, compared to the aforementioned glove system weighing 70 g, according to [
21], as well as our proposed system. To the best of our knowledge, taping sensor strips to fingers might function well in laboratory settings; however, this taped system could fall apart after multiple trials. The practicability and reusability of the taped system in clinical settings remain unsolved.
One of the important advantages of our system is its modularity and extensibility. The finger parts (6 g each) and wrist parts (29 g) can be removed or attached to the main part (38 g) according to the joints of interest. The considered systems [
19,
20,
21] could be compared underlying the usability and ecological validity of the implementation in clinical environments.
In the following discussion, we first address the value of the integrative parameters of the performance and kinematics of hand functions and the joint use of the standard hand dexterity test, tBBT. Subsequently, the empirical findings obtained for characterising the age-related differences in hand functions are examined as they indicate the potential benefits of clinical trials.
5.2. Integrative Parameters of the Performance and Kinematics of Hand Functions
Several previous contributions for IMU-based hand motion tracking systems have significantly enhanced the accuracy of the system [
19,
20,
21]. However, only a small number of studies have conducted evaluations with human subjects. For instance, the Salchow-Hömmen’s [
20] system was designed and tested with four able-bodied adults using functional hand motions, such as grasping or pinching small objects. However, this was not a clinically relevant condition. Few exceptions were found in the studies of Connolly et al. [
19] and Lin et al. [
21]. Their empirical studies were validated among patients with rheumatoid arthritis or mild hand movement disorder. However, both studies had a limited sample size (nine subjects [
19] and two subjects [
21]), which returned results with low ecological validity.
These shortcomings are well reflected in this study. We first improve the hand function assessment in the tBBT, which can provide a clinically valid and reliable assessment with the parameters of performance and kinematics of grasping, transporting, and releasing blocks. Compared to the aforementioned studies, a larger sample size (18 young and 16 older healthy adults) was considered. In addition to the total tBBT time, our system provided a more specific assessment of hand functions. For instance, the CV of the time in the tBBT determined movement variability in time. Four kinematic parameters, including the kinematic trajectories and RoM for the fingers and wrist, were developed to reflect motion smoothness and efficiency during task performance.
Similarly, few digitalised BBTs [
13,
14] have attempted to provide additional kinematic information in the BBT, using a depth camera [
13] or a 3D virtual environment that allows spatial visualisation and operation [
14]. However, considering some known disadvantages of the optical-based approach in
Section 2, earlier investigations are unsuitable for measuring fine-motor hand movement in the BBT, which involves precise and rapid movement of the fingers.
In addition, the joint use of the finger and wrist IMU sensors shows interesting potential for the advent of a fine-motor hand movement analysis. Nonetheless, some believe that wrist-worn sensors only relate to gross-motor arm movements and provide inaccurate information for fine-motor hand movements [
29]. In our study, the wrist module helps segment kinematic trajectories by capturing the movements of the hand and fingers relative to the wrist (see
Figure 7 and
Figure 8). This information can be used for a better understanding of the dynamic movements of the finger and wrist joints.
5.3. Age-Related Differences in Hand Functions
The main finding regarding hand movement performance in the tBBT was that the older group was significantly slower and showed higher movement variability than the younger group, as indicated by longer total tBBT time and greater CV of the time in the tBBT. The results on the total performance time are consistent with previous reports of age-related declines in standard BBT [
10,
13]. The CV of the time in the tBBT suggests additional information regarding hand movement on whether subjects chose to optimise for accuracy (e.g., minimising block placement errors) or speed [
30]. This parameter can be particularly useful in common daily activities, such as picking-up and releasing mugs, requiring precision aiming and object manipulation.
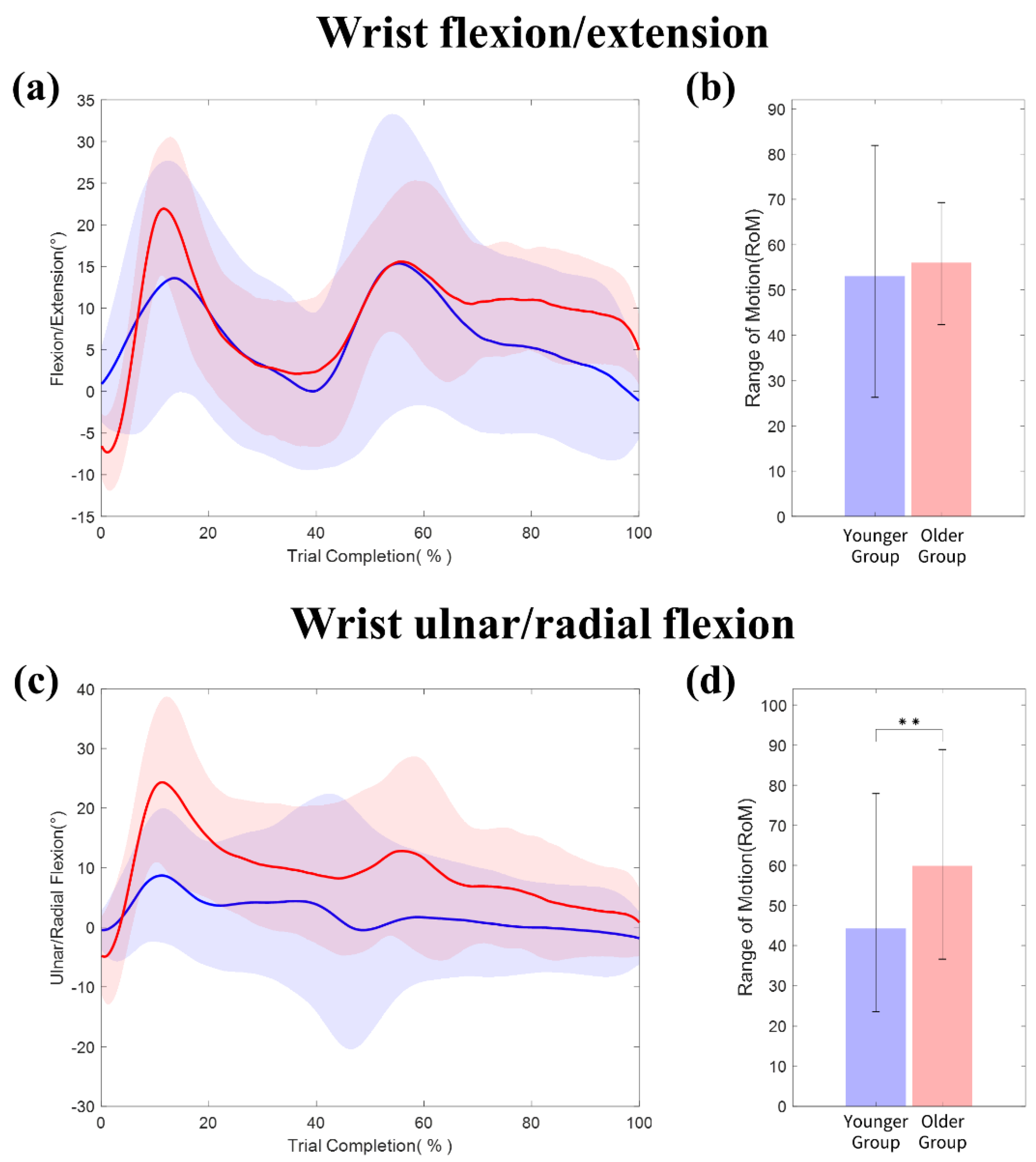
The age-related varied kinematic trajectories and the RoM by the type of finger and wrist movements are evaluated. Overall, the older group required a significantly larger RoM at the thumb, index finger, and wrist when compared to the younger group (**
p < 0.001), with one exception. The flexion/extension RoM of the wrist was indifferent to the groups. We observed that some of the subjects were likely to rely on more proximal joints, such as the shoulder and elbow. This could be partially attributed to individual habits in transferring movements. A similar pattern was observed in the study of virtual reality-based BBT [
14]. However, this should be interpreted with caution, as our study did not collect relevant kinematic parameters at the elbow and shoulder.
Larger RoMs imply less efficient movement strategies for individual tasks. Our study provides evidence of age-related deficits in the efficiency of the tBBT. This finding is presented for the first time in a unique clinical context using a novel IMU-based system.
Another interesting finding was obtained in the kinematic trajectories of the fingers and wrist. During a single action of the tBBT, the finger extension peaked when the block was picked up and remained constant until the subject placed the box on the opposite side of the partition and moved back to the initial position. In comparison, two peak angles were observed at the wrist joint. The subjects started to flex the wrist as they approached a block, and the wrist gradually extended during the block movement, before flexing again as the block was released. The latter finding is consistent with the results of a previous study by Kontson et al. [
12], which examined the kinematics in upper body movements during the tBBT. However, as the data in study [
12] were collected from an optical system with markers (e.g., Vicon), there were limited investigations of fine-motor hand movement, such as kinematics at the fingers and wrist, which is relevant for the tBBT. Unlike the previous approach, our novel IMU-based system allowed us to obtain detailed information related to the kinematic chain between the finger and wrist. One of the findings was that the peak angle of the wrist was first, followed by those of the thumb and index fingers.
6. Conclusions
This study proposed a novel clip-on IMU system applied to the fingers and wrist to assess fine-motor hand movements in clinical settings. Empirical studies were conducted to verify the system accuracy in static and dynamic use conditions, and second, to examine its potential to characterise age-related decline in hand functions.
Several performance and kinematic parameters were extracted from our IMU system to comprehensively understand the hand movements, which are of paramount importance in performing the instrumental activities involved in daily living. Although the standard hand manual dexterity test (i.e., the tBBT) provides a useful measure of overall performance, it has not provided specific components of hand movement that impact speed, variability, and efficiency with advanced age.
Our findings provide some insight by demonstrating that the older group tended to show decreased time completion and higher variability during task performance and additional kinematic parameters, such as a larger RoM at the fingers and wrist, compared to the younger group. The kinematic trajectory analysis showed how the RoM of the fingers and wrist changes with specific hand functions, such as grasping, transporting, and releasing a block.
There is relative preservation of gross movements and a decline in fine manipulation in heathy aging [
30]. Our clip-on IMU system and empirical validations successfully highlight a fine-motor control perspective that might be useful in future rehabilitation practice.
Future studies are needed to increase the ecological validity of the hand dexterity tests in a larger sample and with investigations of hand-object manipulation relevant to real-life activities. In addition to the simple performance-based standard test, our system can provide clinically validated advanced performance and kinematic parameters that contribute to the decline in manipulation. We can further extend and advance the current understanding by establishing normative ranges in different age groups to help guide clinicians to differentiate between decline in hand movement attributable to normal ageing and that attributed to pathological states. Future studies should address more relevant daily living activities that include the hands and real-world objects in unimanual and bimanual tasks. Some bimanual activities of daily living require speed and precision (e.g., typing computer keyboards) or forces (e.g., opening containers). Although the current IMU system can assess the bimanual tasks with both hands, some challenges remain. In addition to the ergonomic aspects of the wearable system (e.g., dimensions, weights, undesirable contacts), the system is further combined with force sensors, allowing for accurate hand function assessment, particularly in object manipulation.

 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}