A Robust Cubature Kalman Filter with Abnormal Observations Identification Using the Mahalanobis Distance Criterion for Vehicular INS/GNSS Integration



Abstract
:1. Introduction
2. System Model of Vehicular INS/GNSS Integration
2.1. Dynamic Model
2.2. Observation Model
3. Robust Cubature Kalman Filter Based on the Mahalanobis Distance Criterion
3.1. Standard Cubature Kalman Filter
3.2. Robust Cubature Kalman Filter Based on Mahalanobis Distance Criterion
3.2.1. Mahalanobis Distance Criterion for Abnormal Observation Identification
3.2.2. Determination of the Robust Factor Based on the Mahalanobis Distance Criterion
3.2.3. Proposed Robust Cubature Kalman Filter
- Perform the standard CKF procedure (26)–(29) to obtain the system state estimate.Else,
- Determine the robust factor by iteratively solving (42) until the judging index satisfies .
- Change the innovation covariance as (37).
- Execute the standard CKF procedure (26)–(29) to update the system state estimate.
4. Performance Evaluation and Analysis
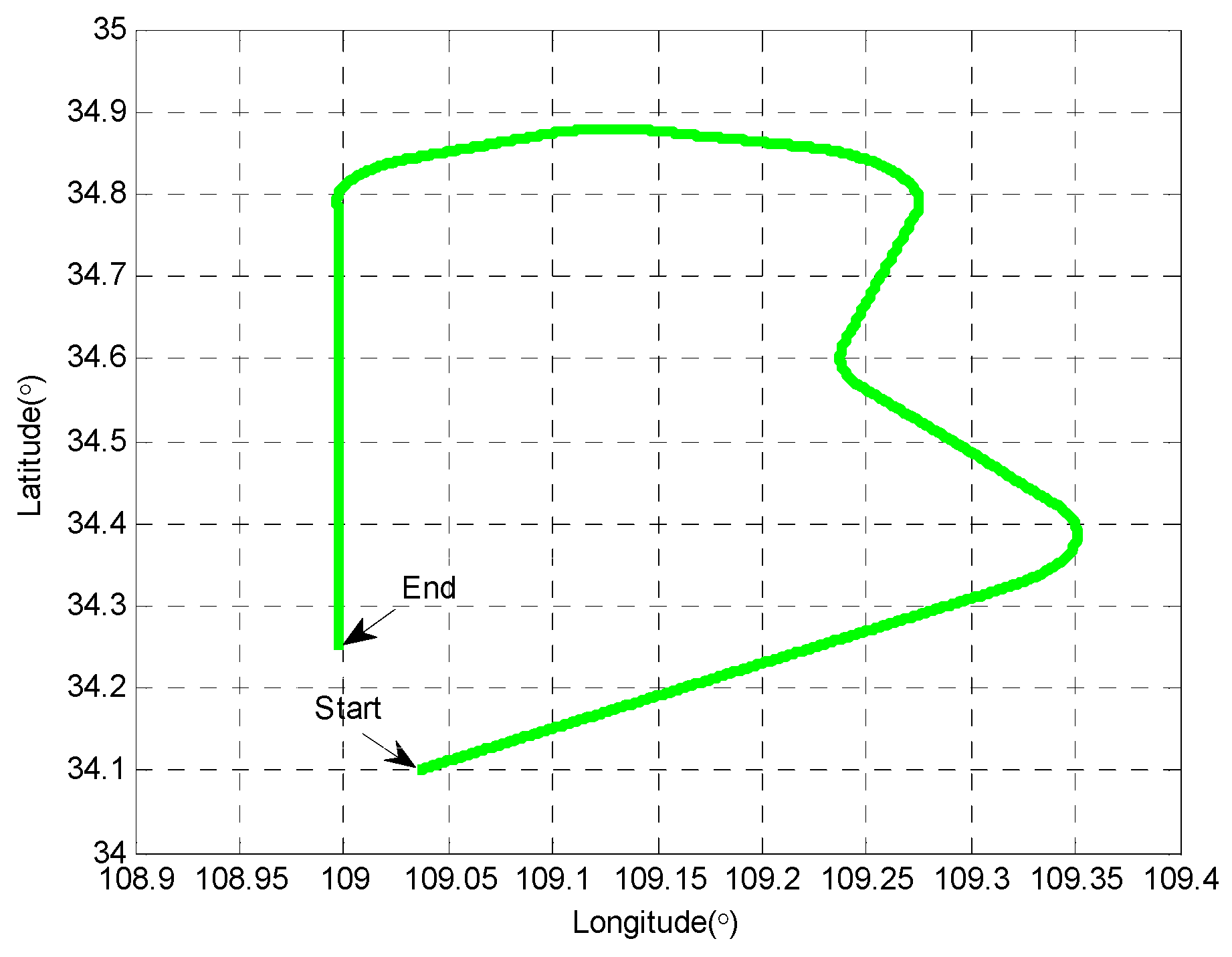
4.1. Simulations and Analysis
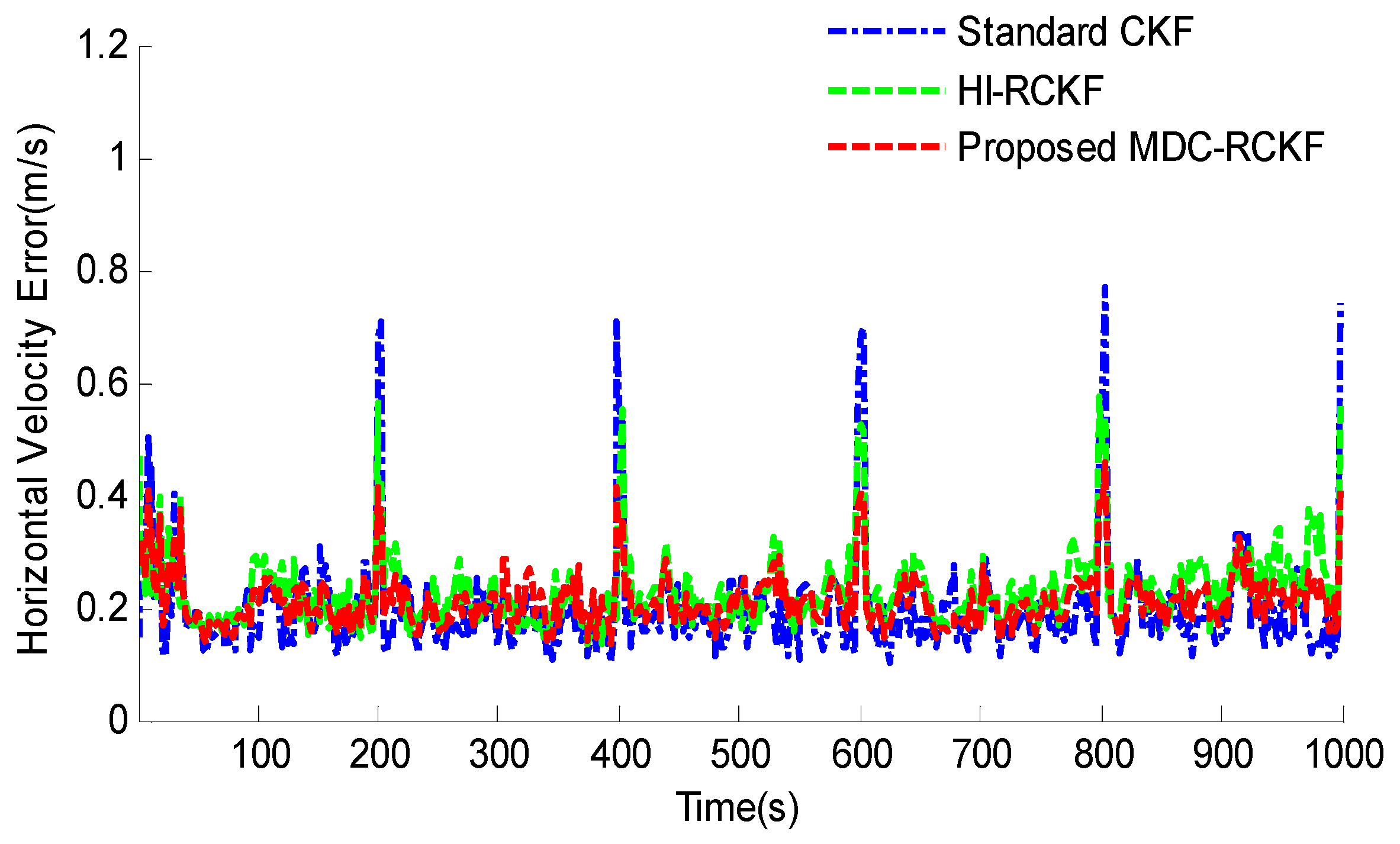
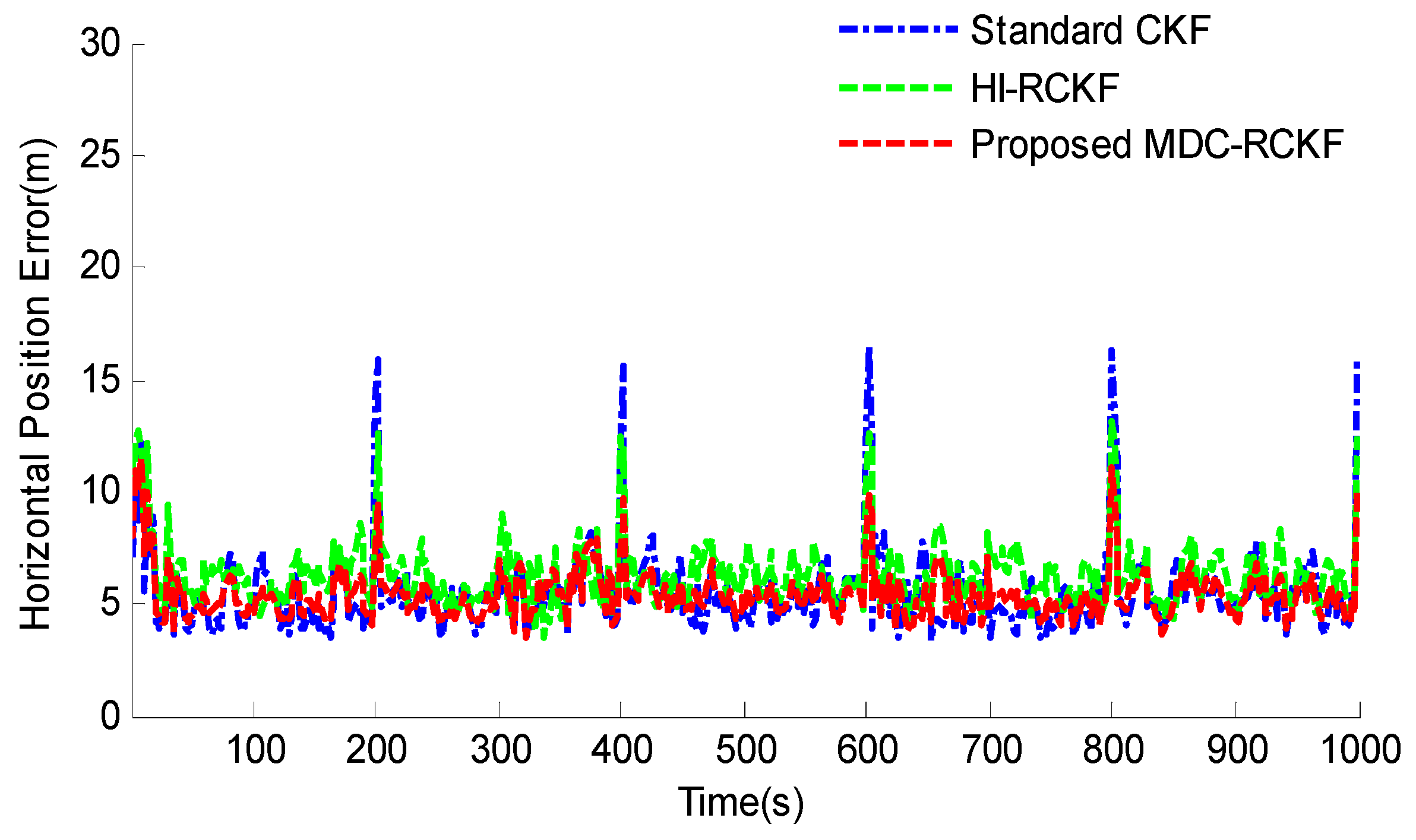
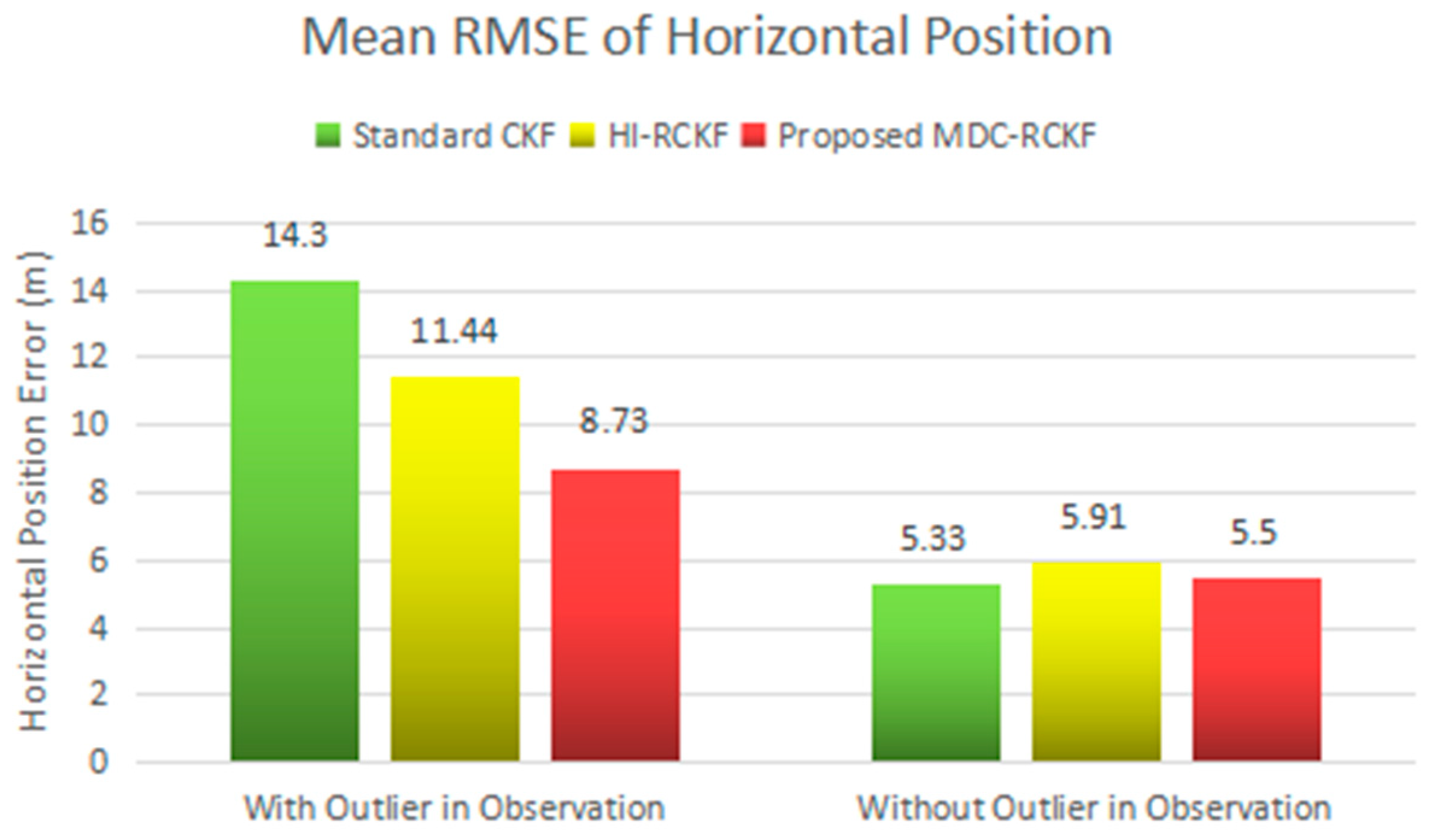
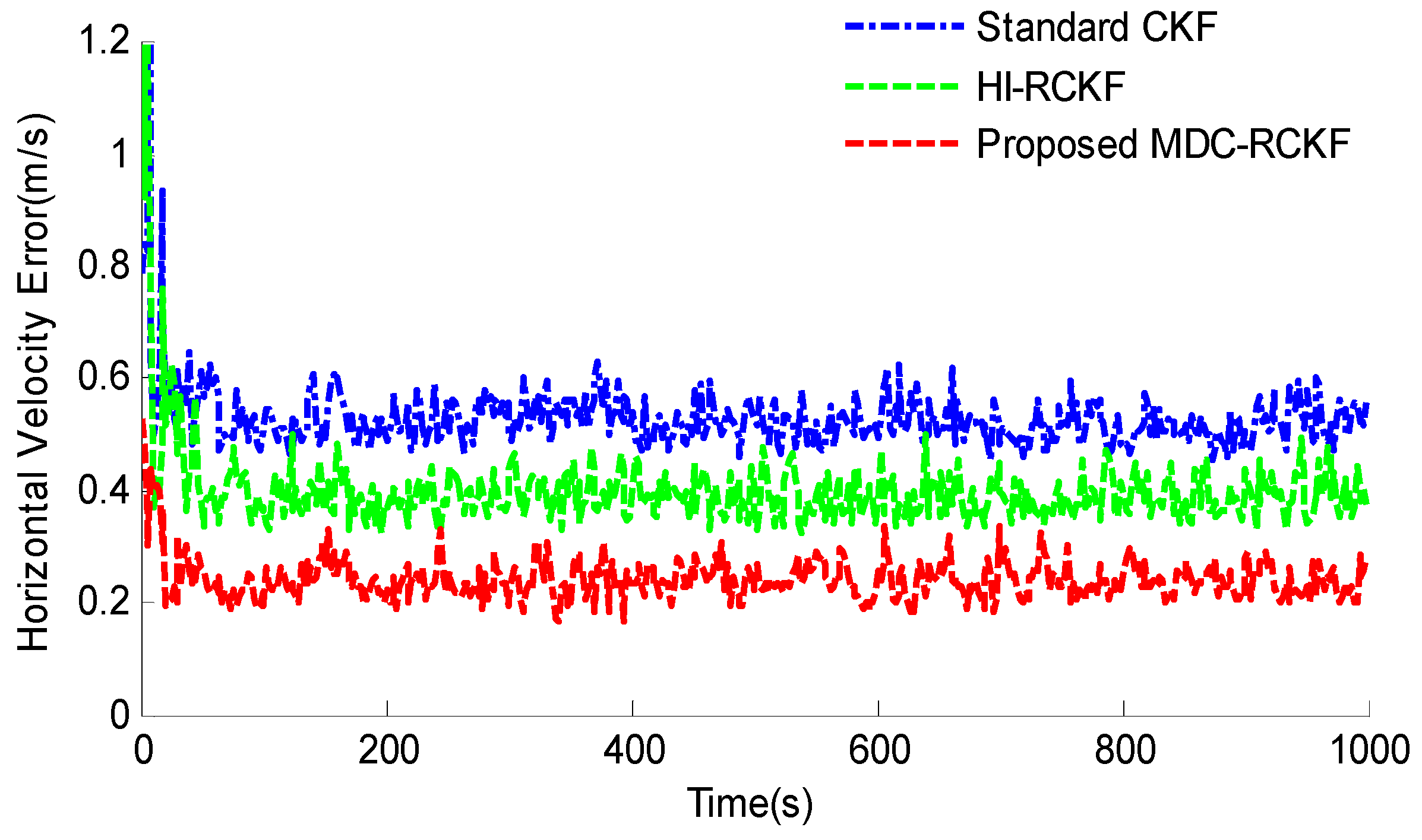
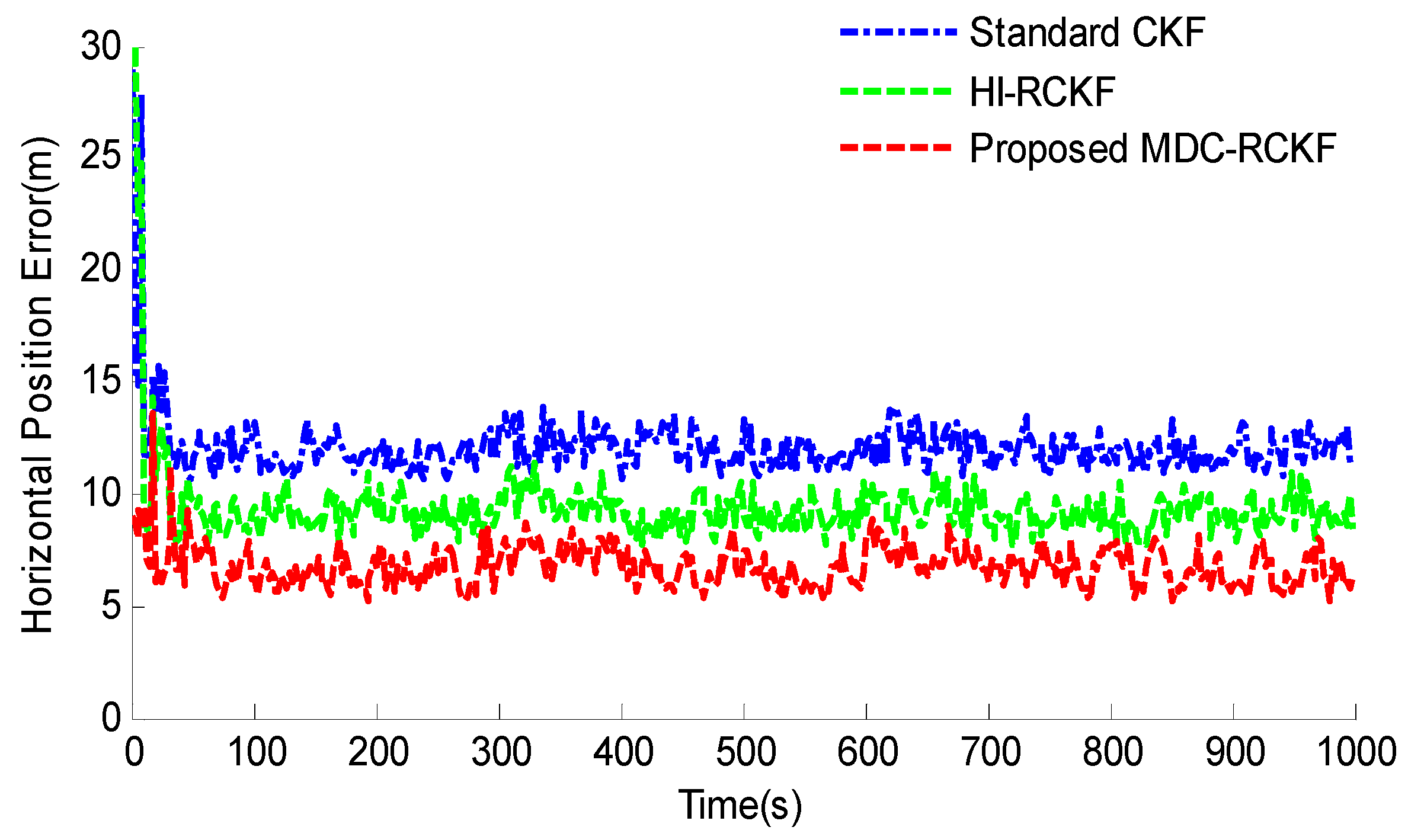
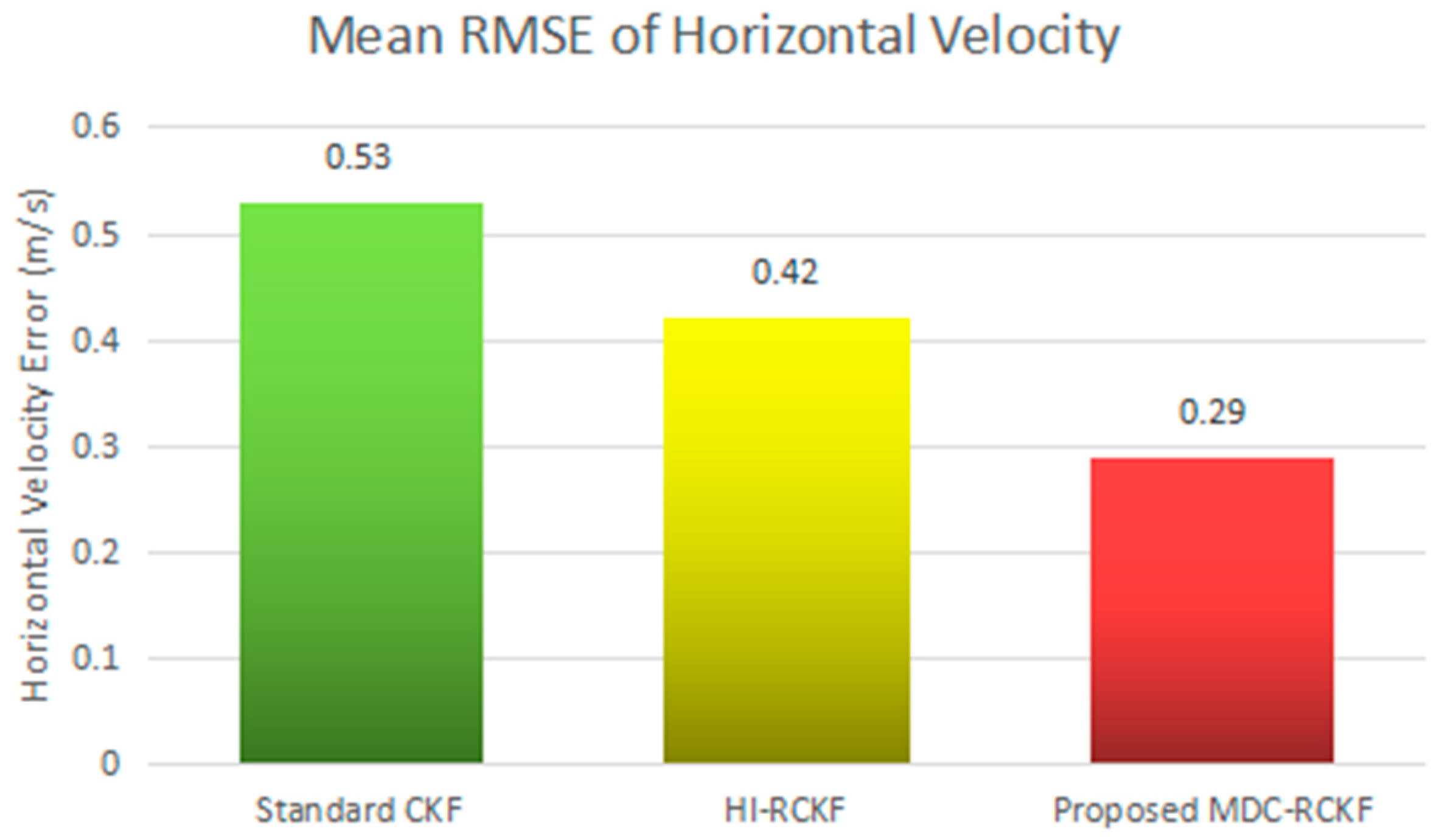
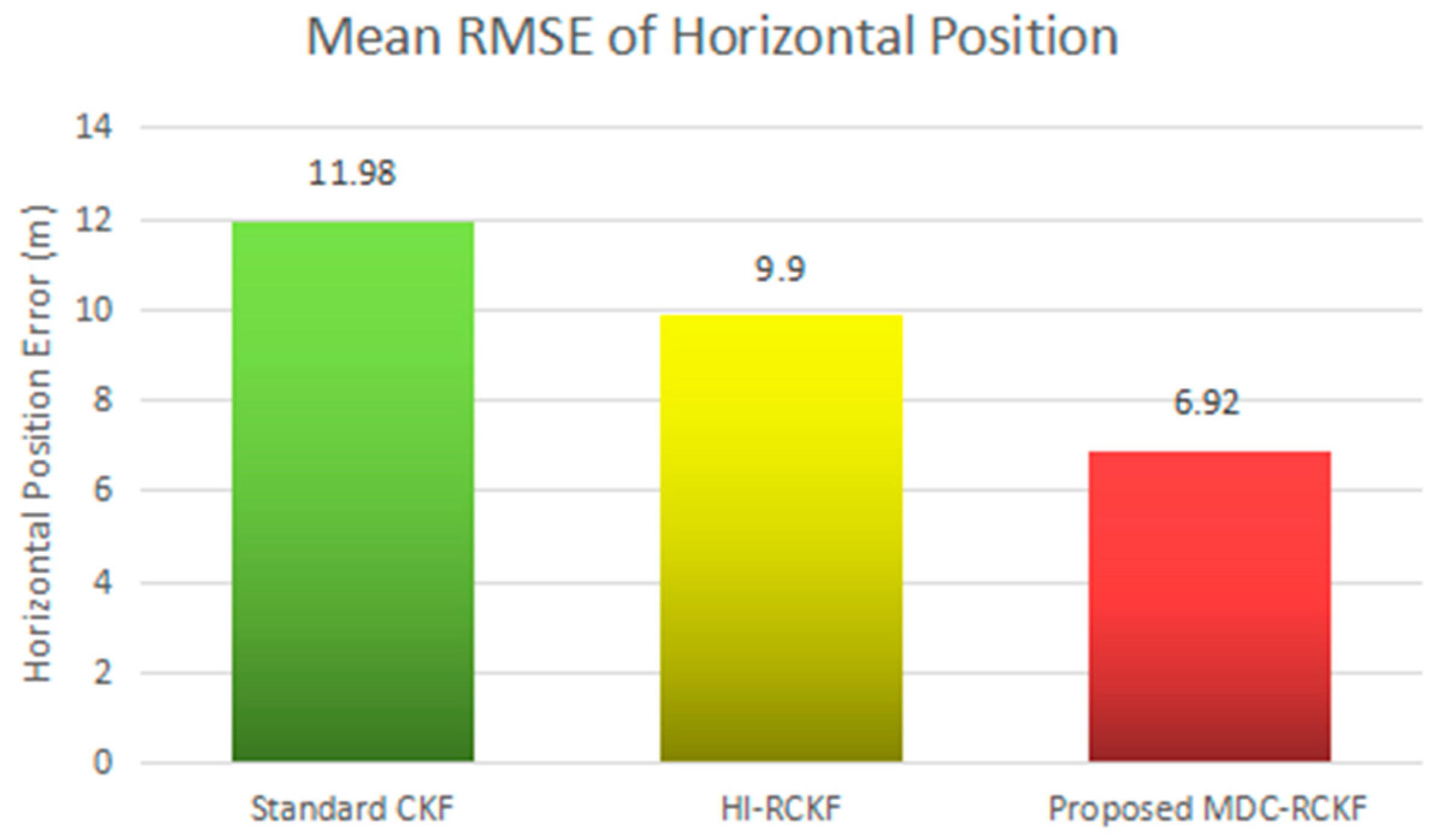
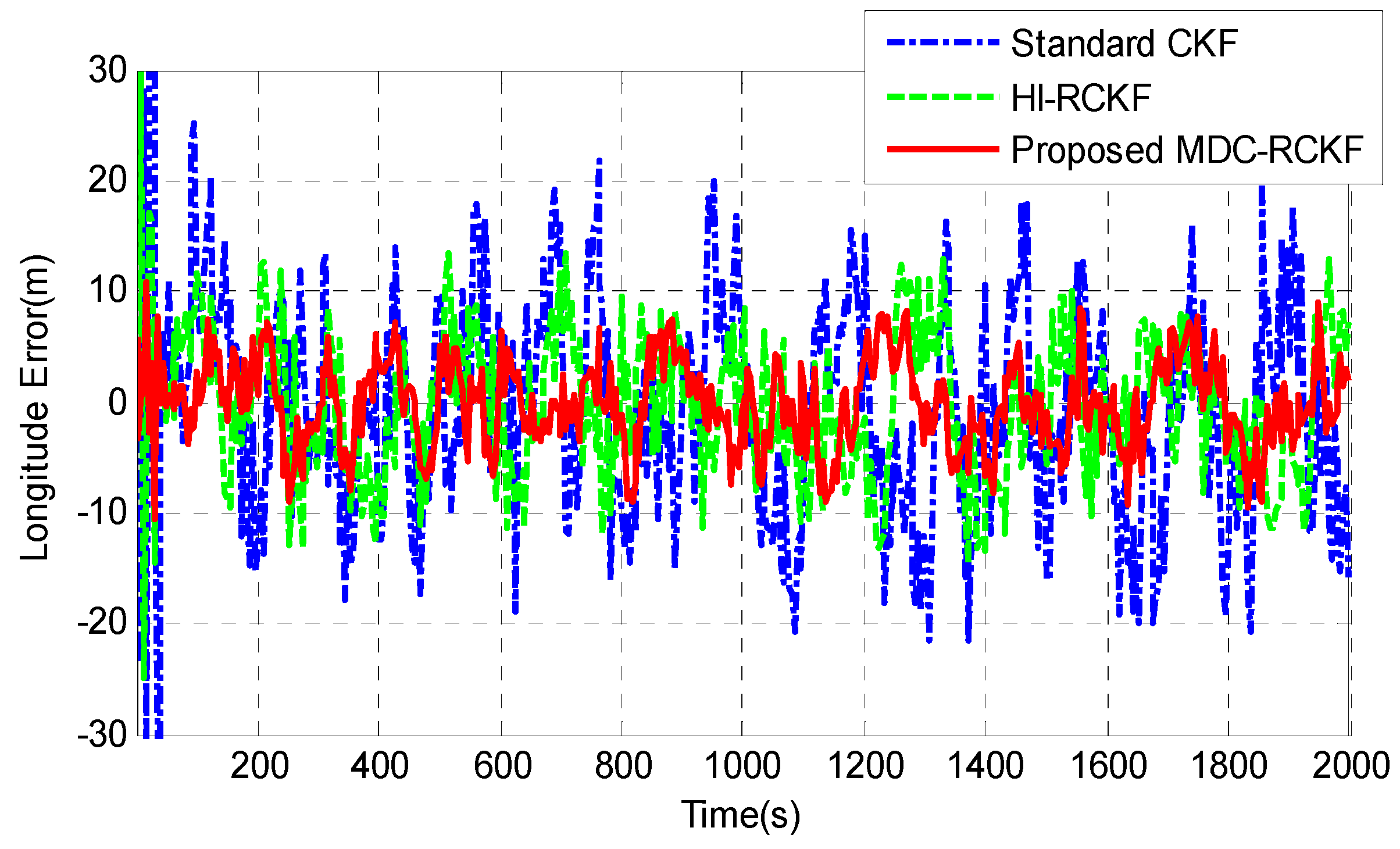
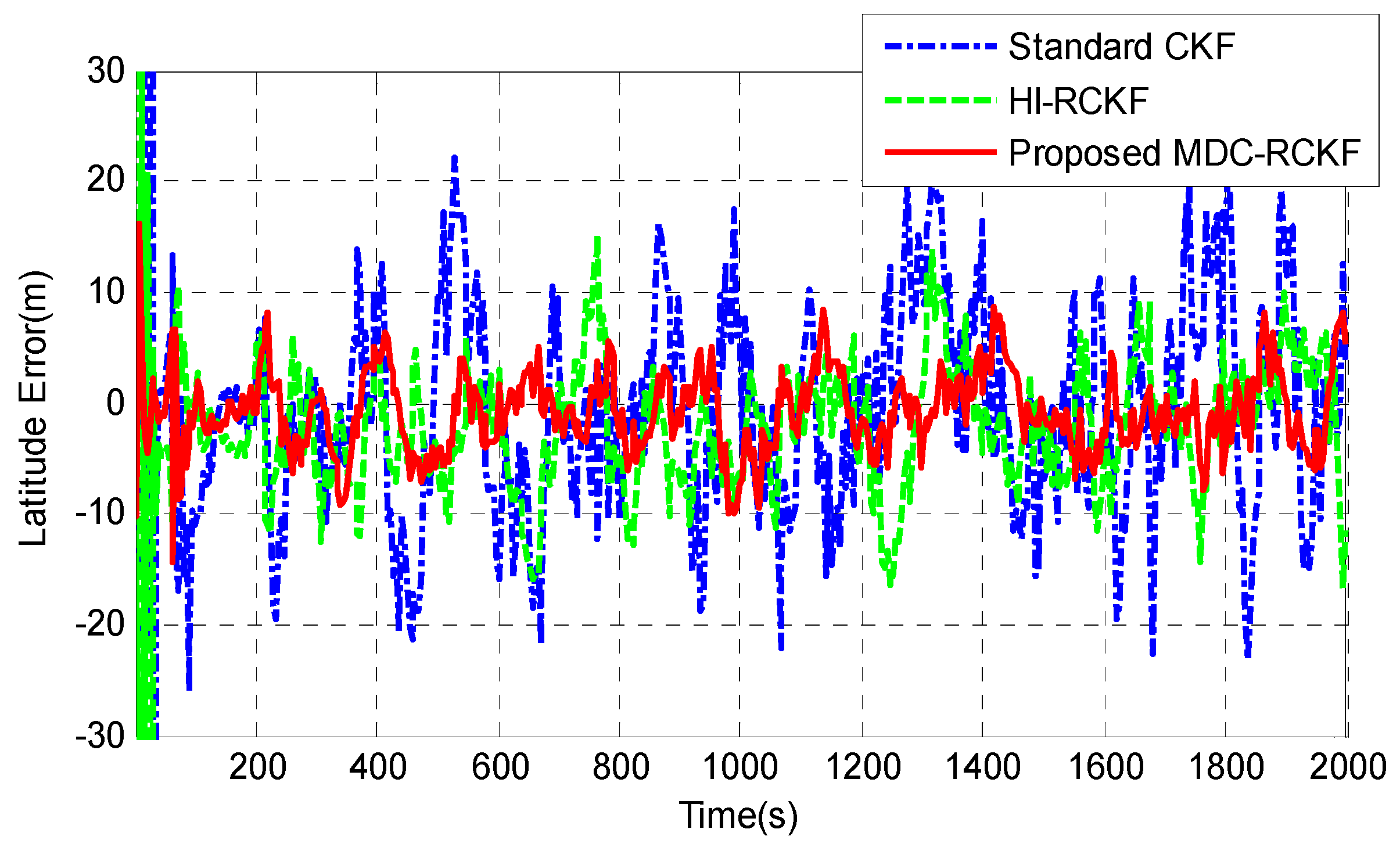
4.1.1. Navigation Accuracy Evaluation
- (i)
- Outliers in observation: There exist outliers in the observation of the INS/GNSS integrated navigation system. In the simulation, the horizontal position error of 15 m was artificially added into the observation described by (15) every 200 s.
- (ii)
- Contaminated Gaussian noise distribution. The nominal Gaussian distribution of the observation noise in INS/GNSS integration is contaminated by another Gaussian distribution, i.e.,:where is the ratio of the perturbing distribution, which is selected as . The obeys the Gaussian distribution with a larger standard deviation. In this section, the standard deviation of the perturbing distribution is assumed to be 5 times larger than that of the nominal distribution, and is set to 0.2.
4.1.2. Computational Performance Evaluation
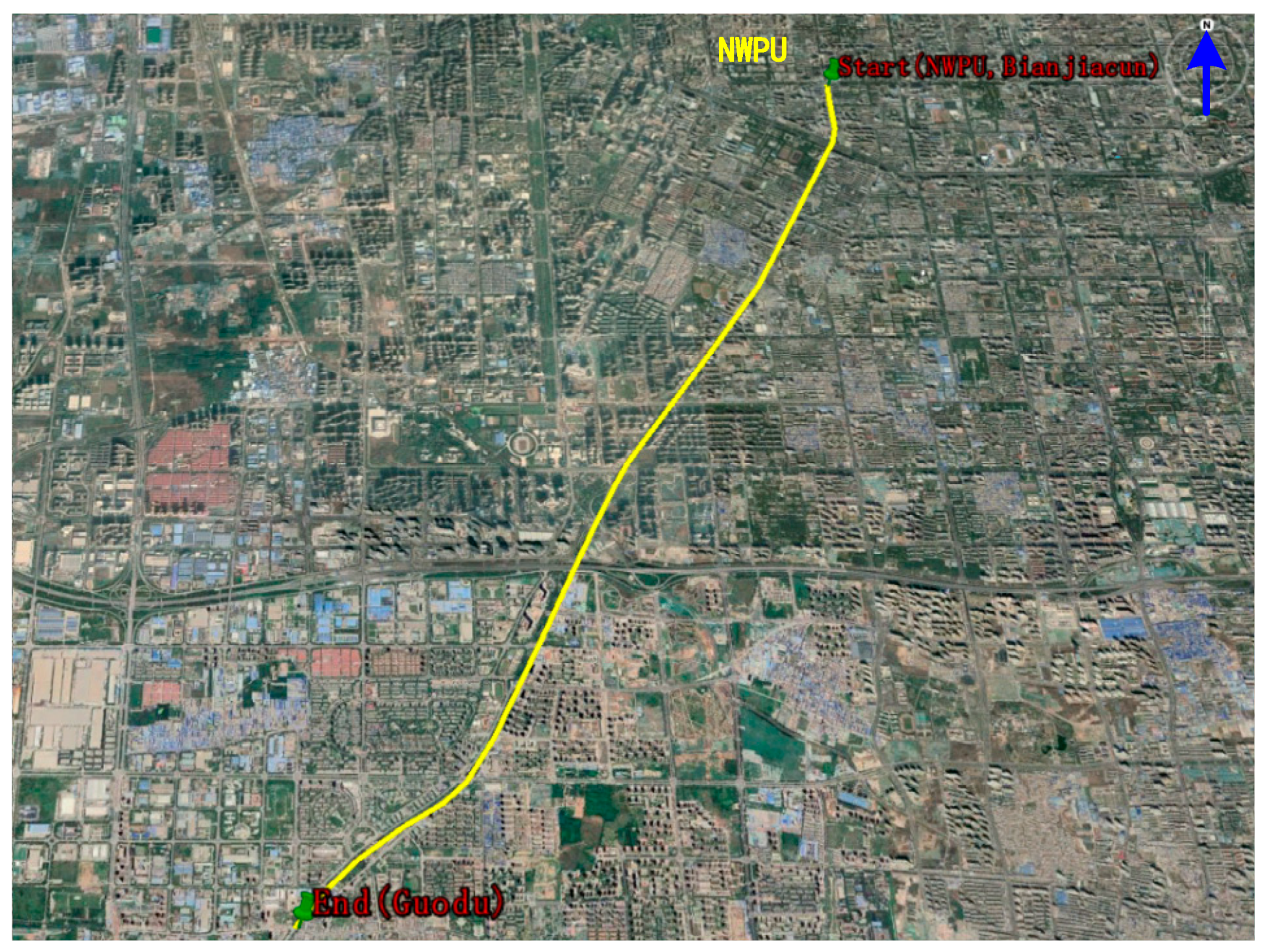
4.2. Practical Experiment and Analysis
4.2.1. Experiment Setup
4.2.2. Experimental Process
4.2.3. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vagle, N.; Broumandan, A.; Lachapelle, G. Multi-Antenna GNSS and Inertial Sensors/Odometer Coupling for Robust Vehicular Navigation. IEEE Internet Things J. 2018, 5, 4816–4828. [Google Scholar] [CrossRef]
- Liu, J.; Cai, B.G.; Wang, Y.P. Particle Swarm Optimization for Vehicle Positioning Based on Robust Cubature Kalman Filter. Asian J. Control 2015, 17, 648–663. [Google Scholar] [CrossRef]
- Liu, J.; Cai, B.G.; Wang, J. Cooperative Localization of Connected Vehicles: Integrating GNSS With DSRC Using a Robust Cubature Kalman Filter. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2111–2125. [Google Scholar] [CrossRef]
- Yang, L.; Li, Y.; Wu, Y.L.; Rizos, C. An enhanced MEMS-INS/GNSS integrated system with fault detection and exclusion capability for land vehicle navigation in urban areas. GPS Solut. 2014, 18, 593–603. [Google Scholar] [CrossRef]
- Chang, L.B.; Li, K.L.; Hu, B.Q. Huber’s M-Estimation-Based Process Uncertainty Robust Filter for Integrated INS/GPS. IEEE Sens. J. 2015, 15, 3367–3374. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F. Improvement of altitude precision in indoor and urban canyon navigation for small flying vehicles. In Proceedings of the 2nd IEEE International Workshop on Metrology for Aerospace, (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; pp. 56–60. [Google Scholar]
- Bijjahalli, S.; Gardi, A.; Sabatin, R. GNSS performance modelling for positioning and navigation in Urban environments. In Proceedings of the 5th IEEE International Workshop on Metrology for AeroSpace, (MetroAeroSpace), Rome, Italy, 20–22 June 2018; pp. 521–526. [Google Scholar]
- Gao, B.B.; Hu, G.G.; Gao, S.S.; Zhong, Y.; Gu, C. Multi-sensor optimal data fusion for INS/GNSS/CNS integration based on unscented Kalman filter. Int. J. Control Autom. Syst. 2018, 16, 129–140. [Google Scholar] [CrossRef]
- Hu, G.G.; Wang, W.; Zhong, Y.M.; Gao, B.; Gu, C. A new direct filtering approach to INS/GNSS integration. Aerosp. Sci. Technol. 2018, 77, 755–764. [Google Scholar] [CrossRef]
- Petritoli, E.; Giagnacovo, T.; Leccese, F. Lightweight GNSS/IRS integrated navigation system for UAV vehicles. In Proceedings of the 2014 IEEE International Workshop on Metrology for Aerospace, (MetroAeroSpace), Benevento, Italy, 29–30 May 2014; pp. 56–61. [Google Scholar]
- Borko, A.; Klein, I.; Even-Tzur, G. Gnss/ins fusion with virtual lever-arm measurements†. Sensors 2018, 18, 2228. [Google Scholar] [CrossRef]
- Angrisano, A.; Pizzo, S.D.; Gaglione, S.; Gaglione, S.; Troisi, S.; Vultaggio, M. Using local redundancy to improve GNSS absolute positioning in harsh scenario. Acta Imeko 2018, 7, 16–23. [Google Scholar] [CrossRef]
- Hu, G.G.; Gao, S.S.; Zhong, Y. A derivative UKF for tightly coupled INS/GPS integrated navigation. ISA Trans. 2015, 56, 135–144. [Google Scholar] [CrossRef]
- Fang, J.C.; Gong, X.L. Predictive iterated Kalman filter for INS/GPS integration and its application to SAR motion compensation. IEEE Trans. Instrum. Meas. 2010, 59, 909–915. [Google Scholar] [CrossRef]
- Hu, G.G.; Gao, S.S.; Zhong, Y.M.; Gao, B.; Subic, A. Matrix weighted multi-sensor data fusion for INS/GNSS/CNS integration. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2016, 230, 1011–1026. [Google Scholar] [CrossRef]
- Chang, G.B. Kalman filter with both adaptivity and robustness. J. Process Control 2014, 24, 81–87. [Google Scholar] [CrossRef]
- Liu, X.; Qu, H.; Zhao, J.H.; Yue, P. Maximum correntropy square-root cubature Kalman filter with application to SINS/GPS integrated systems. ISA Trans. 2018, 80, 195–202. [Google Scholar] [CrossRef] [PubMed]
- Gao, B.B.; Gao, S.S.; Hu, G.G.; Zhong, Y.; Gu, C. Maximum likelihood principle and moving horizon estimation based adaptive unscented Kalman filter. Aerosp. Sci. Technol. 2018, 73, 184–196. [Google Scholar] [CrossRef]
- Gao, B.B.; Gao, S.S.; Zhong, Y.M.; Hu, G.; Gu, C. Interacting multiple model estimation-based adaptive robust unscented Kalman filter. Int. J. Control Autom. Syst. 2017, 15, 2013–2025. [Google Scholar] [CrossRef]
- Gao, B.B.; Hu, G.G.; Gao, S.S.; Zhong, Y.; Gu, C. Multi-Sensor Optimal Data Fusion Based on the Adaptive Fading Unscented Kalman Filter. Sensors 2018, 18, 488. [Google Scholar] [CrossRef]
- Cui, B.B.; Chen, X.Y.; Tang, X.H. Improved Cubature Kalman Filter for GNSS/INS Based on Transformation of Posterior Sigma-Points Error. IEEE Trans. Signal Process. 2017, 65, 2975–2987. [Google Scholar] [CrossRef]
- Zhao, L.Q.; Wang, J.L.; Yu, T.; Chen, K.; Su, A. Incorporating delayed measurements in an improved high-degree cubature Kalman filter for the nonlinear state estimation of chemical processes. ISA Trans. 2019, 86, 122–133. [Google Scholar] [CrossRef]
- Zarei, J.; Ramezani, A. Performance Improvement for Mobile Robot Position Determination Using Cubature Kalman Filter. J. Navig. 2017, 71, 389–402. [Google Scholar] [CrossRef]
- Cao, L.; Qiao, D.; Chen, X.Q. Laplace L1 Huber based cubature Kalman filter for attitude estimation of small satellite. Acta Astronaut. 2018, 148, 48–56. [Google Scholar] [CrossRef]
- Tseng, C.; Lin, S.; Jwo, D. Fuzzy Adaptive Cubature Kalman Filter for Integrated Navigation Systems. Sensors 2016, 16, 1167. [Google Scholar] [CrossRef] [PubMed]
- Miao, Z.; Shi, H.; Zhang, Y.; Xu, F. Neural network-aided variational Bayesian adaptive cubature Kalman filtering for nonlinear state estimation. Meas. Sci. Technol. 2017, 28, 105003. [Google Scholar] [CrossRef]
- Wang, D.; Lv, H.; Wu, J. Augmented cubature Kalman filter for nonlinear RTK/MIMU integrated navigation with non-additive noise. Measurement 2016, 97, 111–125. [Google Scholar] [CrossRef]
- Ding, J.L.; Xiao, J. Design of adaptive cubature Kalman filter based on maximum aposteriori estimation. Control Decis. 2014, 29, 327–334. [Google Scholar]
- Zhang, Q.Z.; Meng, X.L.; Zhang, S.B.; Wang, Y. Singular Value Decomposition-based Robust Cubature Kalman Filtering for an Integrated GPS/SINS Navigation System. J. Navig. 2015, 68, 549–562. [Google Scholar] [CrossRef]
- Li, K.L.; Hu, B.Q.; Chang, L.B.; Li, Y. Robust square-root cubature Kalman filter based on Huber’s M-estimation methodology. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2015, 229, 1236–1245. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Qi, J.J.; Chen, L. Robust Cubature Kalman Filter for Dynamic State Estimation of Synchronous Machines under Unknown Measurement Noise Statistics. IEEE Access 2019, 7, 29139–29148. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, J.; Yu, T.; Jian, H.; Liu, T. Design of adaptive robust square-root cubature Kalman filter with noise statistic estimator. Appl. Math. Comput. 2015, 256, 352–367. [Google Scholar] [CrossRef]
- Hu, G.G.; Gao, B.B.; Zhong, Y.M.; Ni, L.; Gu, C. Robust Unscented Kalman Filtering With Measurement Error Detection for Tightly Coupled INS/GNSS Integration in Hypersonic Vehicle Navigation. IEEE Access 2019, 7, 151409–151421. [Google Scholar] [CrossRef]
- Huang, Y.L.; Zhang, Y.G. A New Process Uncertainty Robust Student’st based Kalman Filter for SINS/GPS Integration. IEEE Access 2017, 5, 14391–14404. [Google Scholar] [CrossRef]
- Chang, G.B. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Chang, L.B.; Hu, B.Q.; Chang, G.B.; Li, A. Robust derivative-free Kalman filter based on Huber’s M-estimation methodology. J. Process Control 2013, 23, 1555–1561. [Google Scholar] [CrossRef]
- Chang, G.B.; Liu, M. An adaptive fading Kalman filter based on Mahalanobis distance. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2015, 229, 1114–1123. [Google Scholar] [CrossRef]
- Qiu, Z.B.; Qian, H.M.; Wang, G.Q. Adaptive robust cubature Kalman filtering for satellite attitude estimation. Chin. J. Aeronaut. 2018, 31, 806–819. [Google Scholar] [CrossRef]
- Xiong, K.; Liu, L.D.; Zhang, H.Y. Modified unscented Kalman filtering and its application in autonomous satellite navigation. Aerosp. Sci. Technol. 2009, 13, 238–246. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | ||
|---|---|---|---|
| Initial Parameters | Velocity (east-north-up) | (5 m/s, 3 m/s, 0 m/s) | |
| Position (longitude-latitude-altitude) | () | ||
| Initial Errors | Attitude (pitch-roll-yaw) | ||
| Velocity (east-north-up) | (0.3 m/s, 0.3 m/s, 0.3 m/s) | ||
| Position (longitude-latitude-altitude) | (8 m, 8 m, 12 m) | ||
| INS | Gyro | Constant drift | 0.1 °/h |
| Random walk coefficient | 0.01 | ||
| Sampling period | 0.05 s | ||
| Accelerometer | Zero-bias | 1 × 10−3 g | |
| Random walk coefficient | |||
| Sampling period | 0.05 s | ||
| GNSS | Velocity Accuracy (RMS) | 0.05 m/s | |
| Horizontal Positioning Accuracy (RMS) | 3 m | ||
| Altitude Accuracy (RMS) | 5 m | ||
| Data update rate | 1 s | ||
| Filtering Methods | Outliers in Observation Case | Contaminated Gaussian Noise Distribution Case | ||
|---|---|---|---|---|
| Average Computational Time (s) | Relative Efficiency | Average Computational Times (s) | Relative Efficiency | |
| Standard CKF | 1.6287 | 1 | 1.6132 | 1 |
| HI-RCKF | 4.8582 | 2.9828 | 4.9643 | 3.0773 |
| Proposed MDC-RCKF | 2.1455 | 1.3173 | 3.8653 | 2.3960 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, B.; Hu, G.; Zhu, X.; Zhong, Y. A Robust Cubature Kalman Filter with Abnormal Observations Identification Using the Mahalanobis Distance Criterion for Vehicular INS/GNSS Integration. Sensors 2019, 19, 5149. https://doi.org/10.3390/s19235149
Gao B, Hu G, Zhu X, Zhong Y. A Robust Cubature Kalman Filter with Abnormal Observations Identification Using the Mahalanobis Distance Criterion for Vehicular INS/GNSS Integration. Sensors. 2019; 19(23):5149. https://doi.org/10.3390/s19235149
Chicago/Turabian StyleGao, Bingbing, Gaoge Hu, Xinhe Zhu, and Yongmin Zhong. 2019. "A Robust Cubature Kalman Filter with Abnormal Observations Identification Using the Mahalanobis Distance Criterion for Vehicular INS/GNSS Integration" Sensors 19, no. 23: 5149. https://doi.org/10.3390/s19235149