Critical Location Spatial-Temporal Coverage Optimization in Visual Sensor Network


Abstract
:1. Introduction
2. Related Works
3. Network Model and Problem Formulation
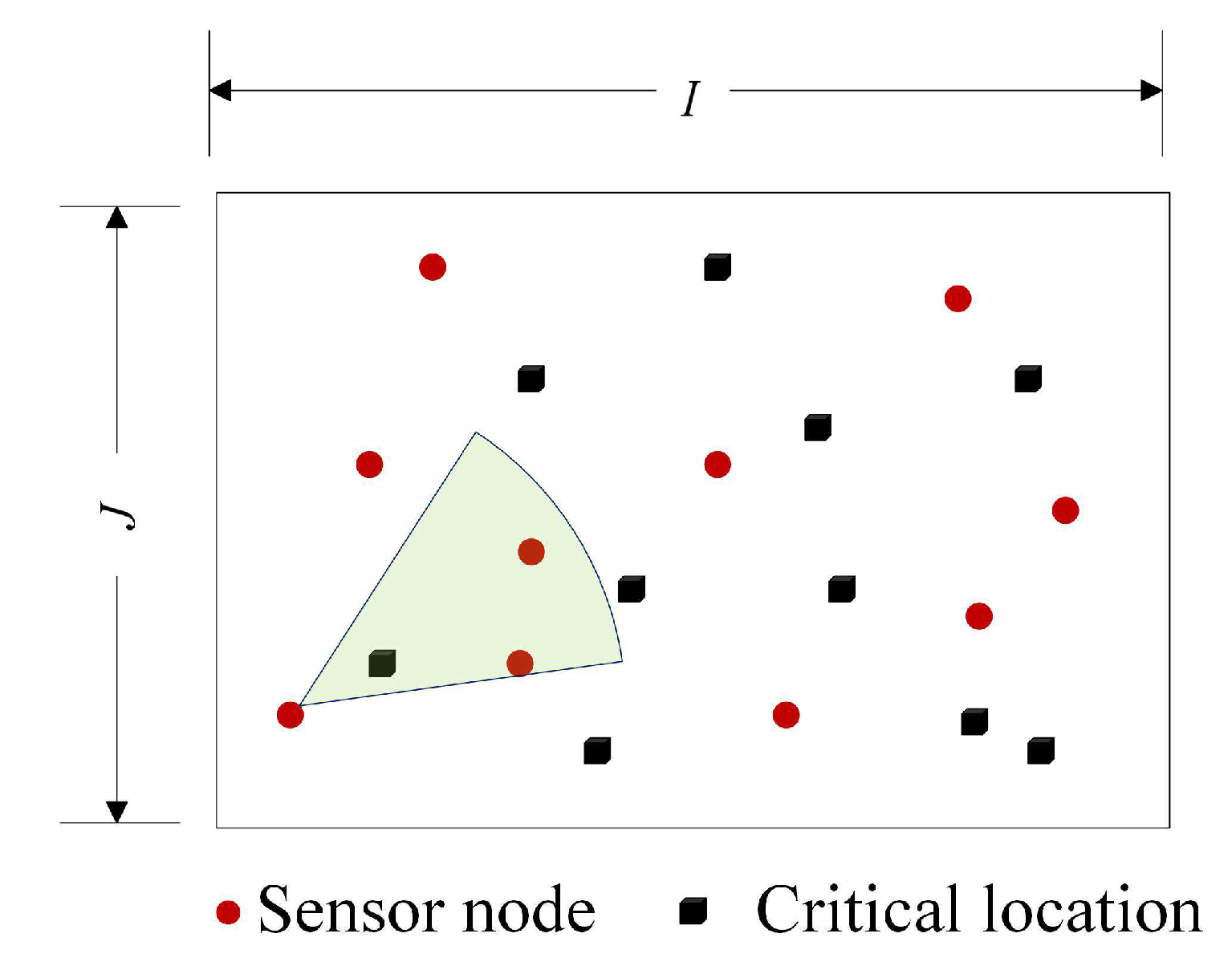
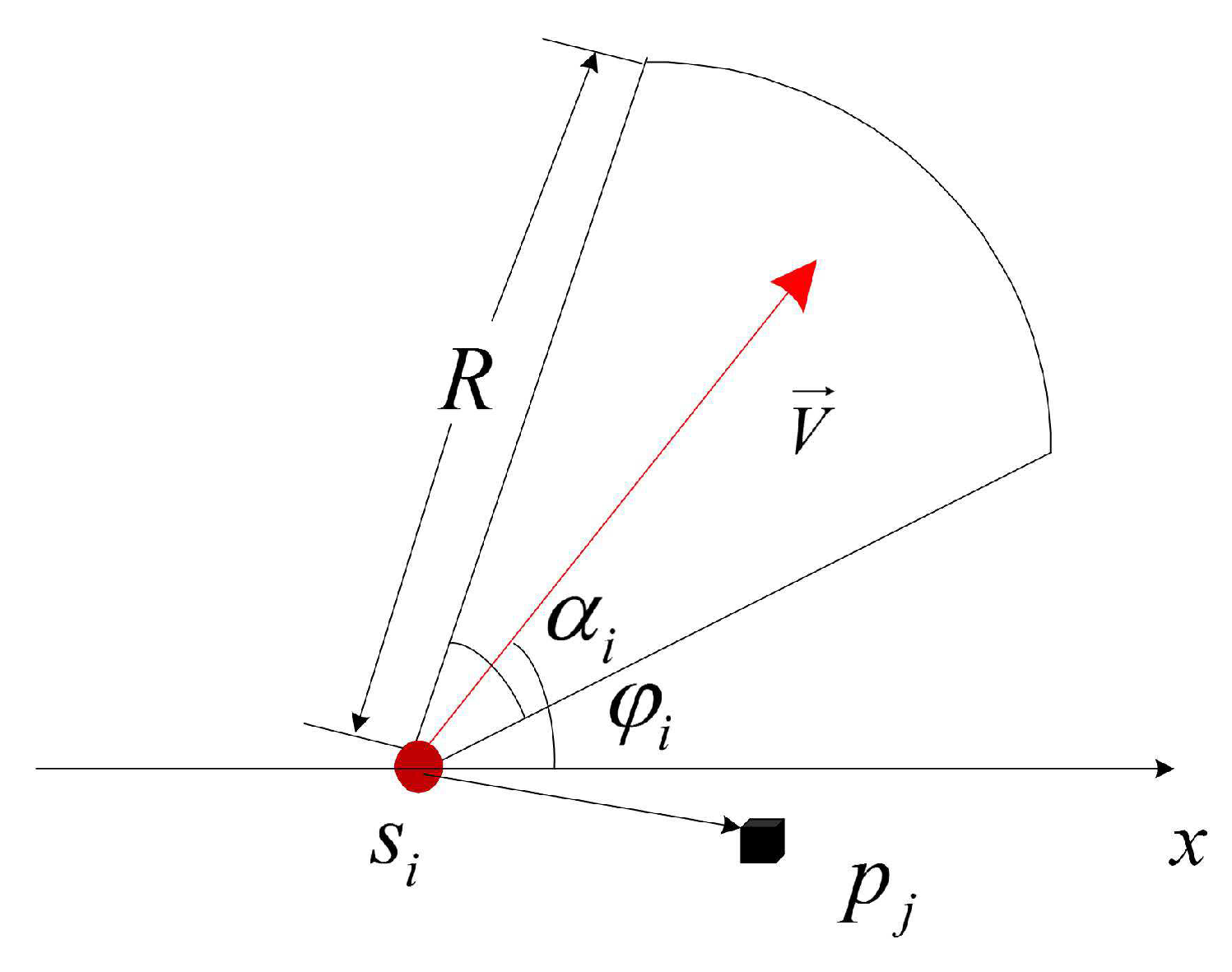
3.1. Network Model
3.2. Problem Formulation
3.2.1. Definitions
3.2.2. Problem Formulation
4. Two-Phase Spatial-Temporal Coverage-Enhancing Method
| Algorithm 1 TSCM |
|
4.1. Phase I: Maximize the Number of Covered Critical Locations Based on Particle Swarm Optimization Algorithm
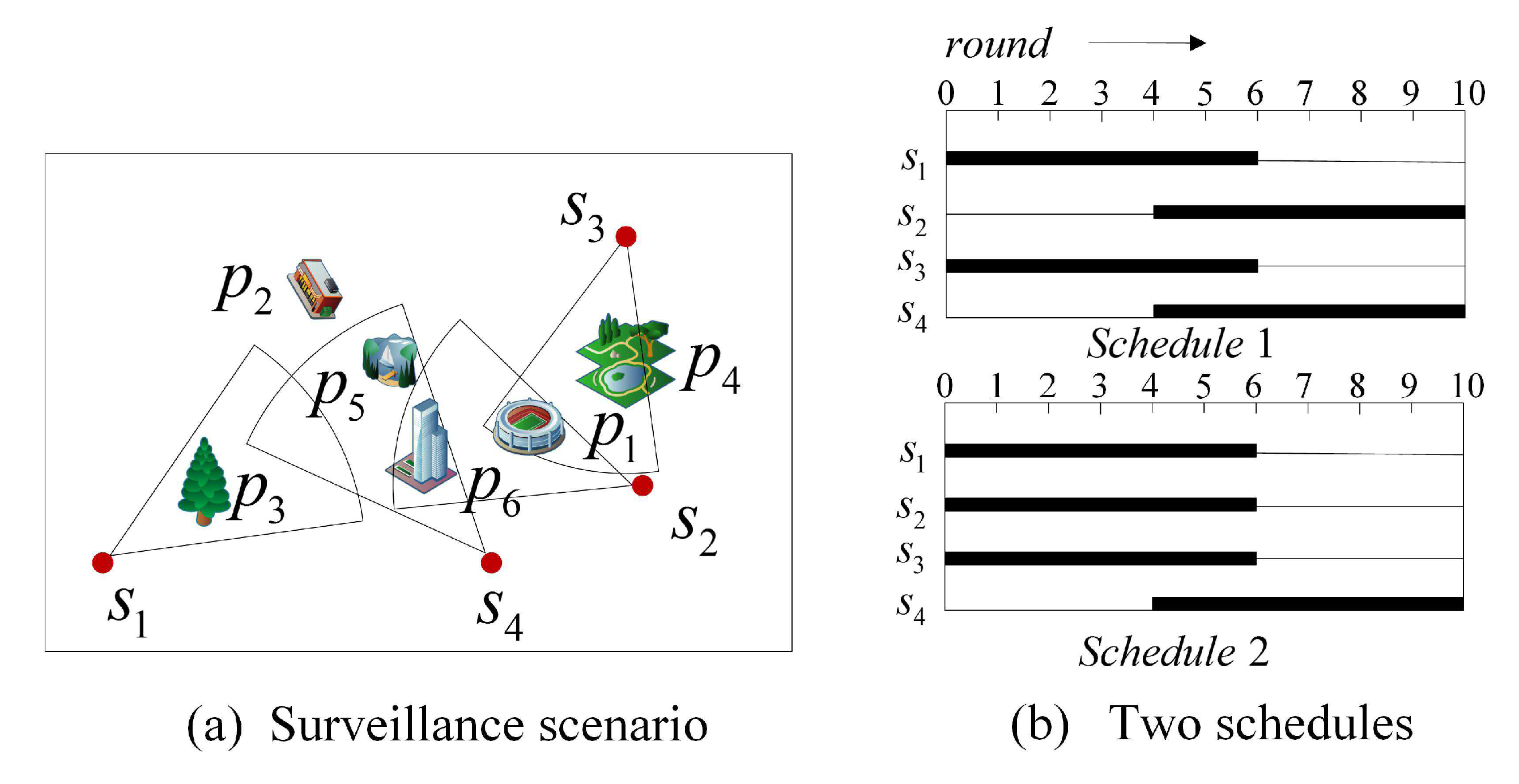
4.2. Phase II: Sensor Node Scheduling for Maximizing the Spatial-Temporal Coverage
| Algorithm 2 Matrix-based Decoding Algorithm |
| 1: Input: S, P, N, l, |
| 2: Output: Set of rounds for covered critical location |
| 3: Initialize , |
| 4: Calculate the values in according to Equations (2) and (3) |
| 5: for j=1,2,...,m do |
| 6: for k=1,2,...,N do |
| 7: for i=1,2,...,n do |
| 8: |
| 9: end for |
| 10: if |
| 11: |
| 12: end if |
| 13: end for |
| 14: end for |
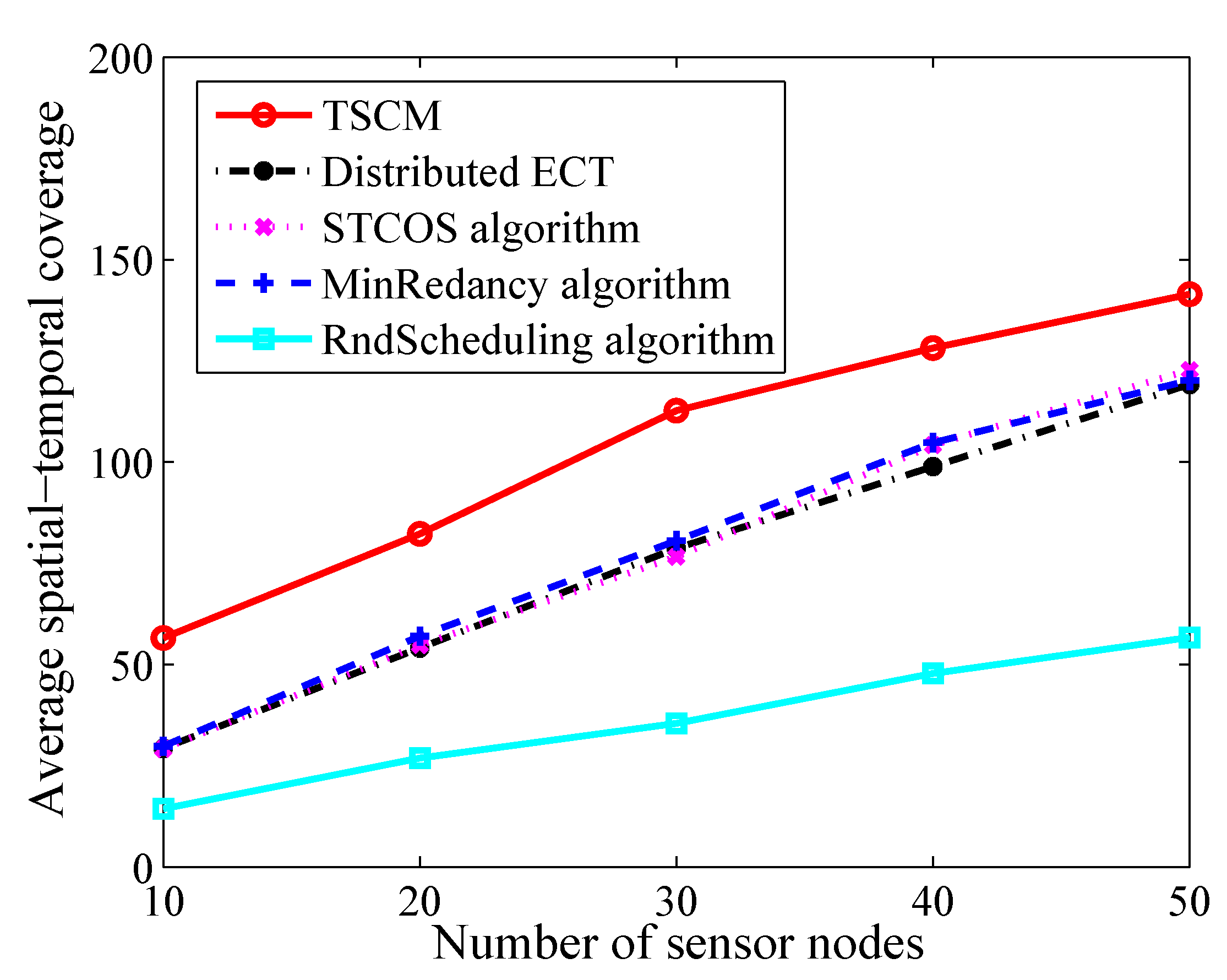
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ayaz, M.; Ammad-Uddin, M.; Baig, I. Wireless sensor’s civil applications, prototypes, and future integration possibilities: A review. IEEE Sens. J. 2018, 18, 4–30. [Google Scholar] [CrossRef]
- Pule, M.; Yahya, A. Wireless sensor networks: A survey on monitoring water quality. J. Appl. Res. Technol. 2017, 15, 562–570. [Google Scholar] [CrossRef]
- Al Mahmud, T. A survey on wireless sensor networks architectural model, topology, service and security. Soc. Sci. Electron. Publ. 2018, 1, 18–26. [Google Scholar]
- Liu, C.; Cao, G. Distributed critical location coverage in wireless sensor networks with lifetime constraint. In Proceedings of the 2012 IEEE Infocom, Orlando, FL, USA, 25–30 March 2012; pp. 1314–1322. [Google Scholar]
- Mishra, S.; Sharma, R.; Saxena, S. The issues of coverage in directional sensor network. Int. J. Comput. Appl. 2015, 115, 17–20. [Google Scholar] [CrossRef]
- Yap, F.G.H.; Yen, H.H. A survey on sensor coverage and visual data capturing/processing/transmission in wireless visual sensor networks. Sensors 2014, 14, 3506–3527. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Li, J.; Zhou, M.C. Optimal deployment of energy-harvesting directional sensor networks for target coverage. IEEE Syst. J. 2018. [Google Scholar] [CrossRef]
- Li, F.; Luo, J.; Xin, S. Autonomous deployment of wireless sensor networks for optimal coverage with directional sensing model. Comput. Netw. 2016, 108, 120–132. [Google Scholar] [CrossRef]
- Zhang, G.; You, S.; Ren, J. Local coverage optimization strategy based on voronoi for directional sensor networks. Sensors 2016, 16, 2183. [Google Scholar] [CrossRef]
- Wu, P.F.; Xiao, F.; Sha, C. Node scheduling strategies for achieving full-view area coverage in camera sensor networks. Sensors 2017, 17, 1303. [Google Scholar] [CrossRef]
- Islam, M.M.; Ahasanuzzaman, M.; Razzaque, M.A. Target coverage through distributed clustering in directional sensor networks. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 167. [Google Scholar] [CrossRef]
- Subash, H.; Pratyay, K. Coverage and connectivity aware energy efficient scheduling in target based wireless sensor networks: An improved genetic algorithm based approach. Wirel. Netw. 2019, 25, 1995–2011. [Google Scholar]
- Chen, H.; Li, X.; Zhao, F. A reinforcement learning-based sleep scheduling algorithm for desired area coverage in solar-powered wireless sensor networks. IEEE Sens. J. 2016, 16, 2763–2774. [Google Scholar] [CrossRef]
- Han, Y.H.; Kim, C.M.; Gil, J.M. A scheduling algorithm for connected target coverage in rotatable directional sensor networks. IEICE Trans. Commun. 2012, 95, 1317–1328. [Google Scholar] [CrossRef]
- Alibeiki, A.; Motameni, H.; Mohamadi, H. A new genetic-based approach for maximizing network lifetime in directional sensor networks with adjustable sensing ranges. Pervasive Mob. Comput. 2019, 52, 1–12. [Google Scholar] [CrossRef]
- Lin, T.Y.; Santoso, H.A.; Wu, K.R. Enhanced deployment algorithms for heterogeneous directional mobile sensors in a bounded monitoring area. IEEE Trans. Mob. Comput. 2017, 16, 744–758. [Google Scholar] [CrossRef]
- Hong, Y.; Li, D.; Kim, D. Maximizing target-temporal coverage of mission-driven camera sensor networks. J. Comb. Optim. 2017, 34, 279–301. [Google Scholar] [CrossRef]
- Hong, Y.; Kim, D.; Li, D. Target-temporal effective-sensing coverage in mission-driven camera sensor networks. In Proceedings of the IEEE International Conference on Computer Communication and Networks, Nassau, Bahamas, 30 July–2 August 2013; pp. 1–9. [Google Scholar]
- Wang, J.; Feng, H.L. Research on node random scheduling algorithm in wireless sensor networks. Syst. Eng. Electron. 2009, 31, 2260–2265. [Google Scholar]
- Konda, K.R.; Conci, N.; Natale, F.D. Global coverage maximization in PTZ-camera networks based on visual quality assessment. IEEE Sens. J. 2016, 16, 6317–6332. [Google Scholar] [CrossRef]
- Liu, J.; Sridharan, S.; Fookes, C. Recent advances in camera planning for large area surveillance. ACM Comput. Surv. 2016, 49, 1–37. [Google Scholar] [CrossRef]
- Mohamadi, H.; Salleh, S.; Ismail, A.S. Scheduling algorithms for extending directional sensor network lifetime. Wirel. Netw. 2015, 21, 611–623. [Google Scholar] [CrossRef]
- Gil, J.M.; Han, Y.H. A target coverage scheduling scheme based on genetic algorithms in directional sensor networks. Sensors 2011, 11, 1888–1906. [Google Scholar] [CrossRef] [PubMed]
- Mohamadi, H.; Salleh, S.; Ismail, A.S. A learning automata-based solution to the priority-based target coverage problem in directional sensor networks. Wirel. Pers. Commun. 2014, 79, 2323–2338. [Google Scholar] [CrossRef]
- Shan, A.; Xu, X.; Cheng, Z. Target coverage in wireless sensor networks with probabilistic sensors. Sensors 2016, 16, 1372. [Google Scholar] [CrossRef] [PubMed]
- Mohamadi, H.; Ismail, A.S.; Salleh, S. Utilizing distributed learning automata to solve the connected target coverage problem in directional sensor networks. Sens. Actuators A Phys. 2013, 198, 21–30. [Google Scholar] [CrossRef]
- Liu, C.; Cao, G. Spatial-temporal coverage optimization in wireless sensor networks. IEEE Trans. Mob. Comput. 2011, 10, 465–478. [Google Scholar] [CrossRef]
- Chong, H.; Sun, L.; Fu, X. An energy efficiency node scheduling model for spatial-temporal coverage optimization in 3D directional sensor networks. IEEE Access 2016, 4, 4408–4419. [Google Scholar]
- Peng, S.; Xiong, Y.H. An area coverage and energy consumption optimization approach based on improved adaptive particle swarm optimization for directional sensor networks. Sensors 2019, 19, 1192. [Google Scholar] [CrossRef]
- Cao, C.; Ni, Q.; Yin, X. Comparison of particle swarm optimization algorithms in wireless sensor network node localization. In Proceedings of the IEEE International Conference on Systems, San Diego, CA, USA, 5–8 October 2014; pp. 252–257. [Google Scholar]
- Atta, S.; Mahapatra, P.R.S.; Mukhopadhyay, A. Solving maximal covering location problem using genetic algorithm with local refinement. Soft Comput. 2018, 22, 3891–3906. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distributed ECT | STCOS | MinRedancy | RndScheduling | ||
|---|---|---|---|---|---|
| Number of sensor nodes | Maximum | 48.2% | 48.4% | 47.4% | 74.6% |
| Average | 30.3% | 29.2% | 28.0% | 66.6% | |
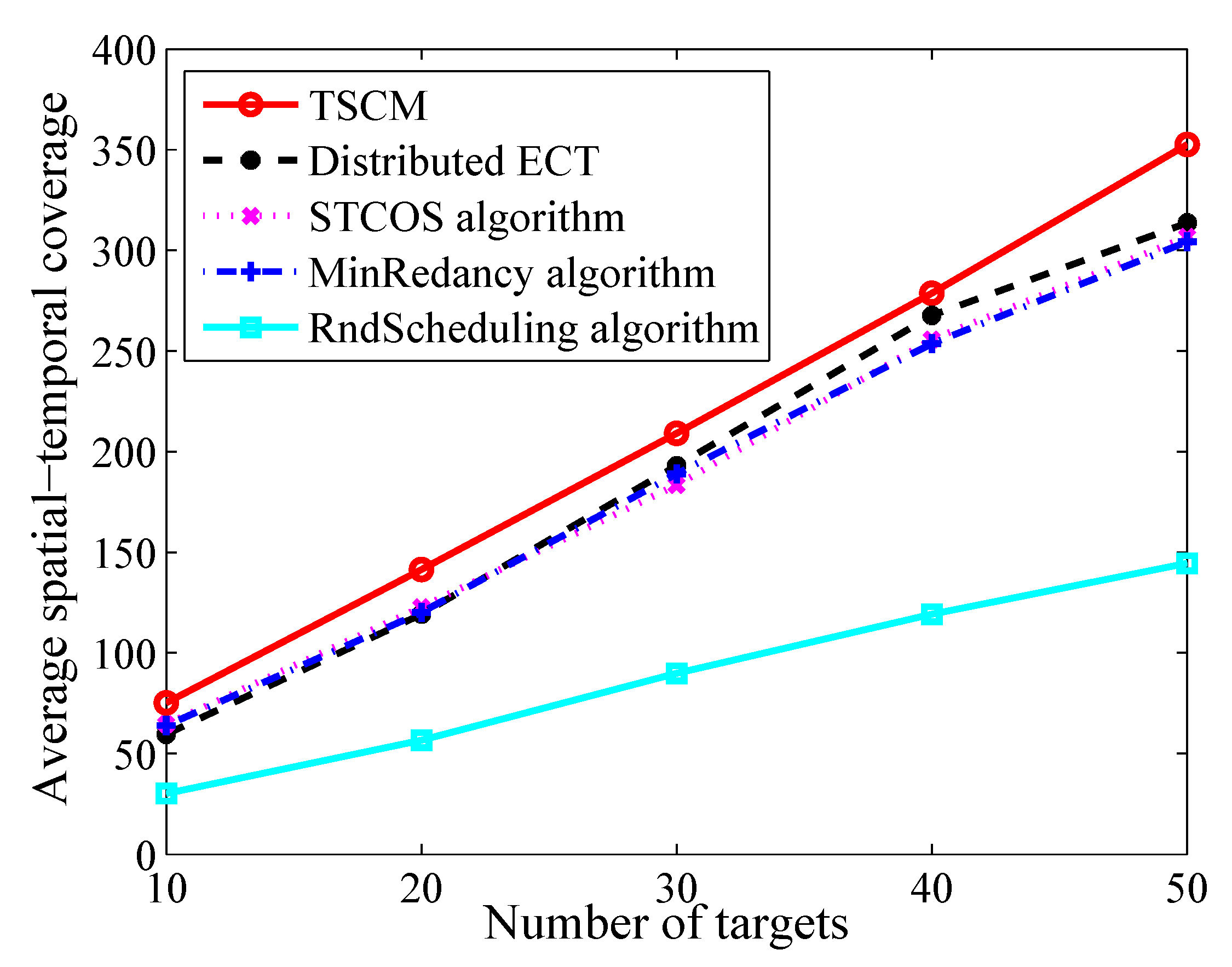
| Number of targets | Maximum | 20.7% | 14.2% | 15.0% | 59.9% |
| Average | 11.8% | 12% | 12.3% | 58.4% | |
| Sensing range | Maximum | 77.4% | 77.2% | 77.0% | 89% |
| Average | 39.3% | 37.4% | 35.9% | 70.2% | |
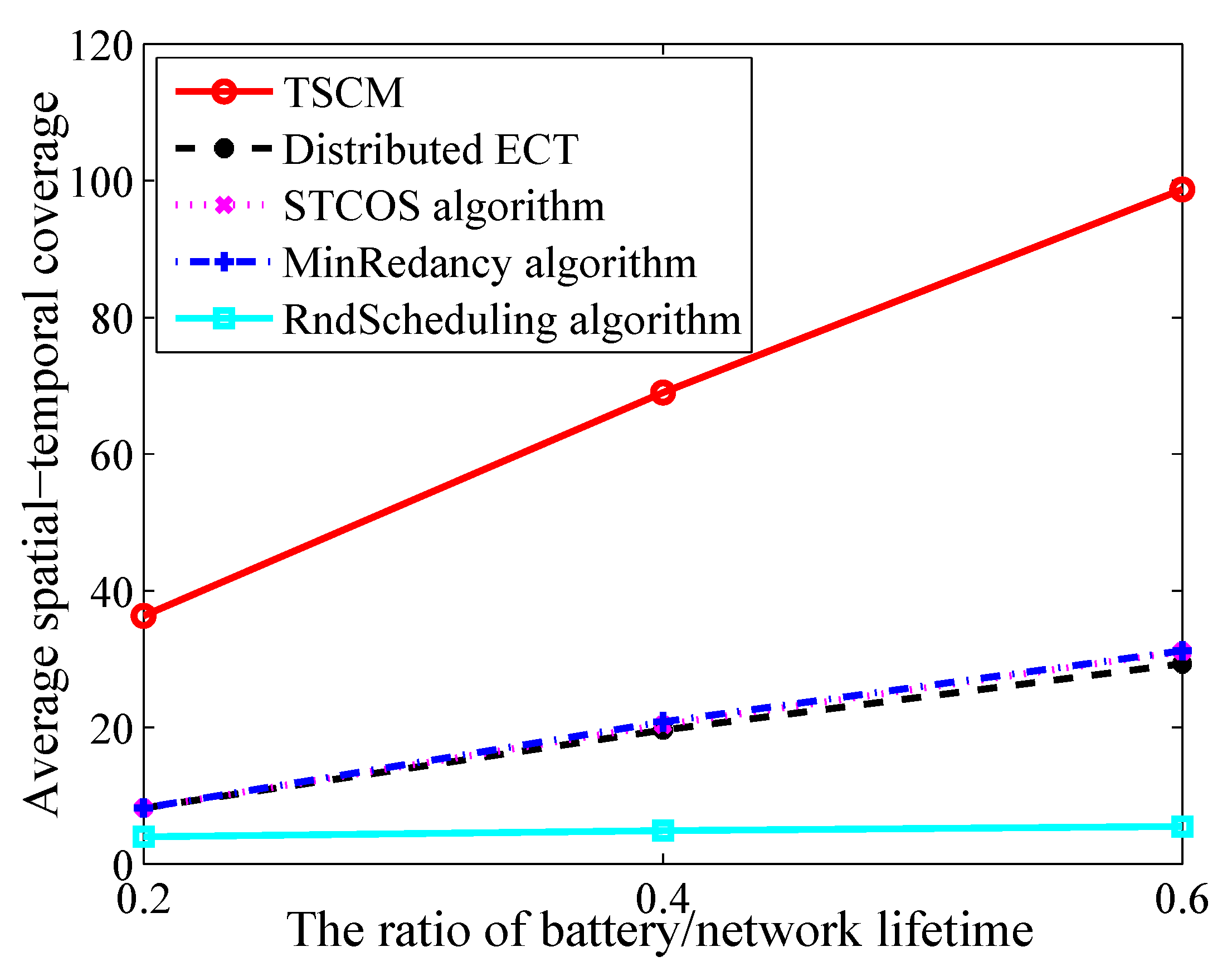
| The ratio of battery/network liftime | Maximum | 77.1% | 76.8% | 76.8% | 94.1% |
| Average | 73.3% | 72.2% | 71.8% | 92.0% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, Y.; Li, J.; Lu, M. Critical Location Spatial-Temporal Coverage Optimization in Visual Sensor Network. Sensors 2019, 19, 4106. https://doi.org/10.3390/s19194106
Xiong Y, Li J, Lu M. Critical Location Spatial-Temporal Coverage Optimization in Visual Sensor Network. Sensors. 2019; 19(19):4106. https://doi.org/10.3390/s19194106
Chicago/Turabian StyleXiong, Yonghua, Jing Li, and Manjie Lu. 2019. "Critical Location Spatial-Temporal Coverage Optimization in Visual Sensor Network" Sensors 19, no. 19: 4106. https://doi.org/10.3390/s19194106
APA StyleXiong, Y., Li, J., & Lu, M. (2019). Critical Location Spatial-Temporal Coverage Optimization in Visual Sensor Network. Sensors, 19(19), 4106. https://doi.org/10.3390/s19194106