1. Introduction
Finger and hand gestures [
1] posses rich information regarding human interaction and communication. The recognition of hand gestures is beneficial for intelligent human machine interfaces (HMI), where traditional input devices such as keyboards or mouses may not be required. In an intelligent HMI, finger gestures may be employed for the smart interaction for large varieties of applications. An example of the gesture-based HMI is the device control, where gestures can be viewed as commands for the operations of a device. Similarly, gestures can be regarded as signs for sign language translation. For virtual reality (VR) and augmented reality (AR) applications, gestures are adopted for the interaction between users and the digital environment. For these applications, accurate recognition of finger gestures is desired to implement the intelligent HMI.
A common solution to hand gesture recognition problems relies on cameras. The resulting techniques, termed vision-based gesture recognition (VGR) techniques, carry out gesture recognition on video sequences captured from cameras [
2,
3,
4,
5,
6]. A common drawback of many VGR techniques is the high computation complexities for extracting gesture information from video sequences. For some HMI applications, such as smart device control, it is desired that the hand gesture recognition techniques are deployed in low-cost and low-power embedded or wearable devices with limited computation resources. Because of the high computation complexities, the implementation of realtime VGR-based recognition on embedded devices would be difficult.
Sensor-based gesture recognition (SGR) [
7] techniques have been found to be effective alternatives to VGR techniques. Examples of sensors adopted for SGR techniques include electromyography, accelerometers, gyroscopes, flex, and/or photoplethysmography [
8,
9,
10,
11]. Some of these sensors can be deployed in embedded devices with low computation capacity for sensory data capturing and processing. With the growing popularity of wearable devices, SGR techniques are emerging as the major approaches for HMI.
Some existing SGR techniques [
10,
11] for hand gesture recognition have the shortcoming that only a single gesture can be recognized at a time. These techniques may not be directly applicable for continuous gesture recognition requiring the classification of a sequence of gestures. A challenging issue for continuous gesture recognition is gesture spotting, which aims to find the starting and end positions of each individual gesture. Accurate gesture spotting results are beneficial for isolating gestures so that each one can be recognized independently. In previous studies [
8,
12], user- or sensor-assisted gesture spotting operations have been adopted. Additional overheads could then be introduced.
A simple approach for automatic gesture spotting is based on the variances of sensory data. Samples with variances below a threshold are regarded as background [
9]. The performance would then be dependent on the selection of thresholds. An alternative [
13] is based on long short-term memory (LSTM) [
14,
15], which is a variant of a recurrent neural network (RNN) [
15] capable of exploiting temporal dependency of input data. In addition to [
13], the PairNet algorithm [
16] has been found to be effective for gesture spotting. The PairNet algorithm is a special 1D convolution neural network (CNN) [
15], where convolution layers with stride size 2 and kernel size
are adopted. As compared with the traditional 1D CNN approaches, the PairNet algorithm has the advantages of a wider receptive field and lower computational complexities for gesture spotting.
Although accurate spotting results have been observed in this framework [
13,
16], mobile phones equipped with accelerometers and gyroscopes are responsible for capturing sensory data. As a result, only the movements of hands holding mobile phones are spotted. However, in some applications, recognition of finger gestures may be more desirable. Finger gestures are usually characterized by diverse movements among different fingers, and complicated transitions between successive gestures. Therefore, the scheme in [
13,
16] for simple hand movements may not be well suited for the spotting of finger gestures.
The objective of the paper is to present a novel SGR system for the recognition of a sequence of finger gestures. The system is able to carry out accurate gesture spotting and recognition even for gestures with diverse movements and complicated transitions. The finger movements are captured by flex sensors [
17,
18], which measure the amount of deflection of each finger during the movements.
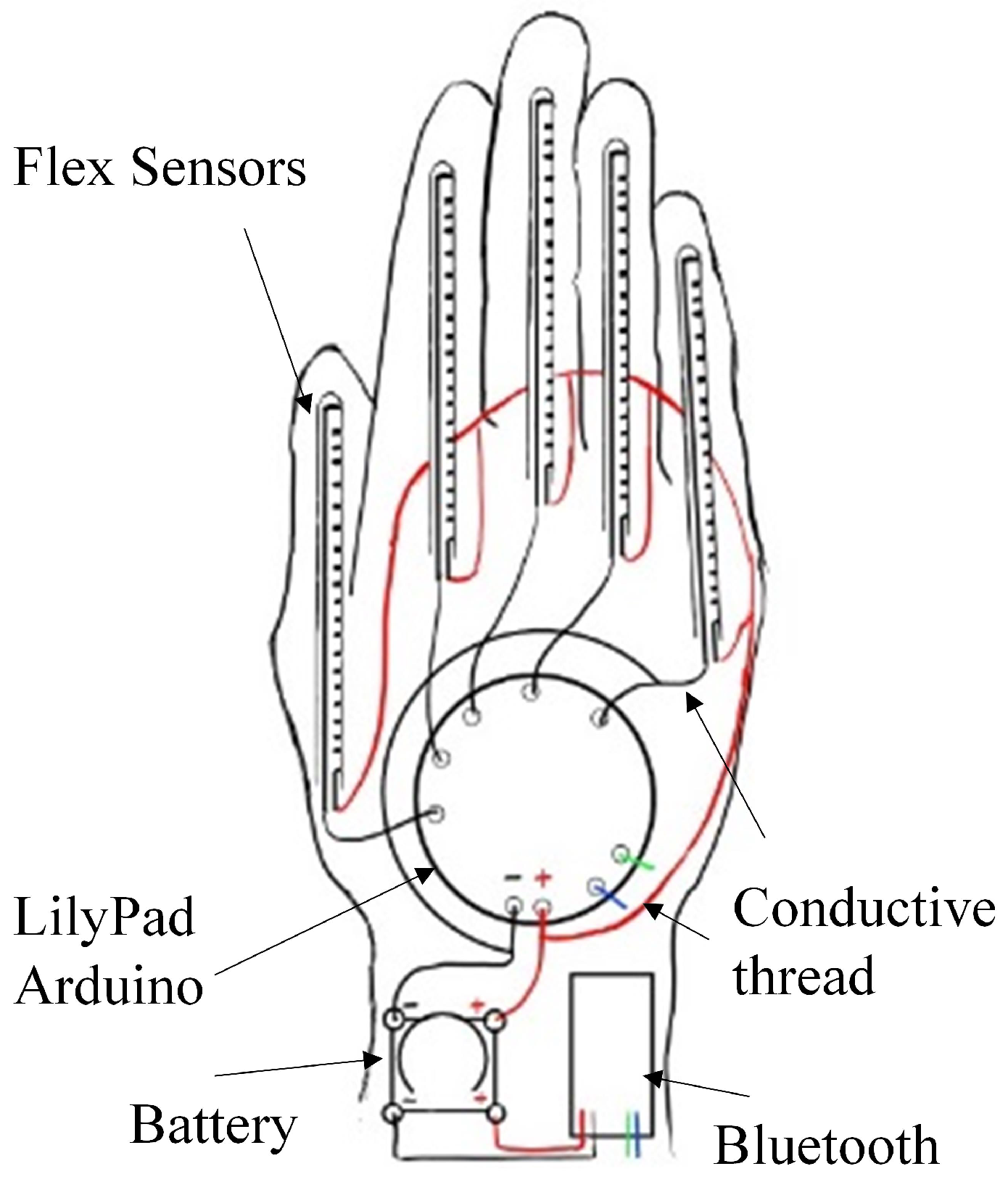
To collect and deliver the sensory data produced by the flex sensors, a wireless smart glove is implemented in the proposed SGR system. The glove consists of the flex sensors, an Arduino micro-controller, a battery module, and a wireless transmission module. The lithium polymer (LiPo) rechargeable battery [
19] is used to supply power to the electronics components in the glove. The battery has the advantages of being light weight, having a high power density, and a large number of charge cycles. The LilyPad Arduino [
19,
20] is used as the micro-controller for data collection. It works on the LiPo battery, and allows easy connection with the other components in the glove. The wireless module supporting Bluetooth 4.0 is also included in the glove for the delivery of the collected data with a low power consumption [
21]. Furthermore, e-textile techniques, such as conducting threads [
22], are adopted for integrating/connecting these components.
In this study, a novel gesture spotting scheme based on the gated recurrent unit (GRU) [
23,
24] is proposed for the collection of sensory data produced by the smart glove. Similar to the LSTM technique, the GRU is a variant of RNN. While capable of exploiting temporal dependency of sensory data, the GRU has the additional advantages of lower computational complexities for inference operations. The training process for the GRU takes both the movements associated with different fingers and the transitions between two successive gestures into consideration. To facilitate the training operations, a novel labelling scheme is also proposed for the training data. In the scheme, each finger gesture and its associative transitions share the same label. In this way, the transitions can be included in the training process without introducing a high training overhead. Accurate gesture spotting can still be achieved with simple computation. On the basis of the spotting results, a maximum a posteriori (MAP) estimation is then performed for the final classification.
A prototype system based on the smart glove has been developed for performance evaluation. In the system, the training and testing operations are carried out on separate platforms. The server with GPU was adopted for the training process. The resulting GRU model was then implemented on a low-cost Raspberry Pi 3 platform for testing and evaluation. The experimental results reveal that the proposed algorithm is effective for hand gesture recognition at finger level which require both robust and accurate classification.
The remaining parts of this paper are organized as follows.
Section 2 reviews some basic facts of the GRU for gesture spotting. The implementation of the smart glove for the finger gesture recognition is presented in
Section 3. The proposed finger gesture recognition algorithm is given in
Section 4. Transition issues are discussed in
Section 5. The experimental results of the algorithm are included in
Section 6. Finally,
Section 7 contains some concluding remarks.
2. Preliminaries
This section provides a brief review of the GRU [
23]. Consider an input sequence
to the GRU, where
T is the length of the sequence. Let
be the state sequence associated with the GRU. All the states
have the identical dimension
D. With the initial condition
,
H can be computed from
X by
for
, where
and
in (
1), (
2), and (
3) are the weight matrices for input-to-hidden and hidden-to-hidden connections. We call
the bias vectors. These matrices and vectors are the parameters to be learned during the training process. Furthermore, the function
in (
1) and (
2) is an element-wise sigmoid function. The function tanh denotes the hyperbolic tangent. The operator ⊙ in (
3) and (
4) is the element-wise multiplication.
Figure 1 summarizes the GRU operations in (
1), (
2), (
3), and (
4).
In the GRU, we call
and
the update gate and reset gate at the iteration
i, respectively. The
is the current memory content at iteration
i. The update gate
and reset gate
determine the fraction of input information to be remembered and the fraction of the past information to be forgotten, respectively. We can see from (
3) that the current memory content
is determined by the past state
, the reset gate
, and the current input
at step
i. The current state
is then computed by the current memory content
, the past state
, and the update gate
.
The operations in (
1), (
2), (
3), and (
4) can be regarded as a function
F, which takes
and
as the inputs, and produces output
. That is,
Given the input sequence
X, the GRU then involves the iterative application of function
F for each
from
to
, as shown in
Figure 2. At the current iteration
i, the
and
are served as inputs, where the
is the output produced at the previous iteration
. The output
of the current iteration is then used as the input for the next iteration
. Let
y be the result of GRU operations. In
Figure 2, we see that
where softmax denotes the softmax function,
V is the state-to-output matrix, and
is the output of function
F at the final iteration
T.
6. Experimental Results
This section presents some experimental results of the proposed algorithm and system.
Figure 13 shows the experimental setup in this study. The wireless smart glove shown in
Figure 4 was used for the collection of sensory data for training or testing. A server with NVIDIA GTX 1070 GPU was adopted for the training of algorithms for the finger gesture recognition. The neural network models were built by Keras [
25]. The inference model for testing was implemented by Python. The testing platform was different from the training one. It was based on a low-cost Raspberry Pi 3 computer. This could facilitate the deployment of the proposed systems for large varieties of internet-of-things (IOT) applications.
There were four gesture classes (
) in the experiments, as shown in
Figure 8. The transitions associated with class
are shown in
Figure 9,
Figure 10,
Figure 11 and
Figure 12, respectively. The training set consisted of 2088 finger gestures from five participants. Some gestures in each class in the training set also contained transitions to the other classes. The gestures were labelled by the rules outlined in
Table 2 for training. There were 2400 gestures from six participants in the testing set, which is different from the training set. Some gestures and their associated transitions in the test set formed a test sensory data. The number of gestures
K in the test sensory data is known a priori.
Table 3 shows the size of each gesture class of the training and testing sets.
Examples of applications of the proposed system with four gesture classes include the remote menu control of tablets or home appliances, and the authentication of IOT devices. Gestures acquired by the smart glove represent actions required by users or a personal identification number (PIN) to tablet or home appliances. The corresponding sensory data is delivered to Raspberry Pi 3 by wireless Bluetooth module, which then performs the continuous gesture recognition for subsequent actions. Because of its small size and low power consumption, the Raspberry Pi 3 can be easily configured as a tablet or a controller for home appliances.
Table 4 shows the examples of gestures and their actions for various applications.
The measured sensory data produced by the flex sensors of the smart glove for each gesture class
are shown in
Figure 14,
Figure 15,
Figure 16 and
Figure 17, respectively. For each class
i, the sensory data for Gesture
i, and Gesture
i concatenated with Transition
,
, are revealed. Because the gestures in the four classes involve movements in thumb, index finger, and middle finger, the sensory data contains the resistance value
of the flex sensors associated with these fingers in the smart glove. The resistance value of each sensor is sampled with sampling rate 50 samples/s.
It can be observed from
Figure 14,
Figure 15,
Figure 16 and
Figure 17 that the resistance value of each flex sensor is dependent on the finger movements of the corresponding finger. Therefore, gesture recognition based on flex sensors can be effective. Consider the sensory data shown in
Figure 14 for Gesture 1 as an example. Only thumb movements are involved in Gesture 1. Therefore, without transition, we can see from
Figure 14a that the waveform produced by the flex sensor associated with thumb exhibits large variations. Moreover, the large variations observed in the waveforms from other flex sensors in
Figure 14b–d are mainly due to transitions. Therefore, it would be beneficial to include the transitions for training operations.
Figure 18 and
Figure 19 show examples of testing sequences produced by flex sensors consisting of three hand gestures back to back. The results of gesture spotting are also revealed as horizontal bars at the bottom of the figure. The bars labeled by w.T. and w/o. T. are the spotting results with and without inclusion of transitions for training, respectively. We can see from
Figure 18 that, when the transitions are included for training, accurate gesture spotting can be achieved. The three gestures shown in
Figure 18 are Gesture 1, Gesture 3, and Gesture 4. The algorithm identifies
,
, and
as the largest sets. Therefore, the recognition outcome is
= 1,
= 3, and
= 4. Furthermore, because the three gestures shown in
Figure 19 are Gesture 4, Gesture 3, and Gesture 2, the corresponding recognition outcome is
= 4,
= 3, and
= 2. By contrast, without considering the transitions, recognition outcomes are not correct due to the interferences by transitions.
The effectiveness of the proposed algorithm can be further demonstrated by evaluating the confusion matrix for the gesture recognition with and without inclusion of transitions for GRU training.
Table 5 shows the evaluation results on the testing set. The size of the input window
to the GRU is
. The dimension of the hidden state
is
. The confusion matrix contains information about actual and predicted gesture classifications carried out by the system. Each element in a confusion matrix represents the percentage the gesture in the corresponding row is classified as the gesture in the corresponding column. Therefore, the diagonal elements in the matrix are the hit rates. The element in row
i and column
i is the hit rate of gesture
i, denoted by
, which is the number of gestures in class
i that are correctly classified divided by the total number of gestures in class
i. From
Table 5, we see that the proposed algorithm with the inclusion of transitions for GRU training has superior hit rates for all the four classes compared to its counterpart without the inclusion of transitions.
The size of input window
T may have an impact on the performance of the GRU.
Figure 20 reveals the average classification hit rate, parameter size, computational complexity, and average computation time of the GRU for various input window size
T. The average hit rate is defined as the number of gestures correctly classified divided by the total number of gestures in the testing set. The parameter size of the GRU is the total number of elements of matrices/vectors
and
V in (
1), (
2), (
3), and (
6). The computational complexity is measured as the number of floating point operations (FLOPs) for obtaining each output
. The average computation time is the average time required for carrying the inference of a single gesture in the testing set. It is measured on the Raspberry Pi 3 platform. In the experiments, the dimension of the hidden state was
. The training operations were carried out with the inclusion of transitions.
It can be observed from
Figure 20a that GRUs with larger window sizes
T have higher average hit rates than their counterparts with lower window sizes. This is because larger window sizes are beneficial for exploiting long-term dependency of the sensory data. On the other hand, a smaller window size is able to reduce computation time. This is because the computation complexity is lowered as the window size decreases, as shown in
Figure 20c. Nevertheless, the average hit rate may be significantly degraded. In particular, when
T is reduced from 60 to 5, we can see from
Figure 20a that the average hit rate lowers from 97.30% to 88.38%. Furthermore, as revealed in
Figure 20b, because the sizes of matrices/vectors in the GRU are independent of
T, the GRUs with different window sizes have the same parameter size. Consequently, it may not be advantageous to decrease window size
T to speed up the computation and/or reduce the parameter size.
In addition to window size
T, the dimension
D of the hidden state
is also influential on the performance of the GRU. The hidden state
is responsible for abstracting the input sensory data for classification. Therefore, the selection of different dimensions may result in different average classification hit rates, parameter sizes, computational complexities, and computation times, as shown in
Figure 21. In the experiments, the size of the input window
T was 60. The training operations were carried out with the inclusion of transitions.
When
, the hidden states can accommodate more information for accurate classification. Therefore, it can be observed from
Figure 21a that the proposed GRU algorithm with
has the highest hit rate 96.65%. However, we can also see from
Figure 21 that the parameter sizes, computation complexity, and average computation time grow with dimension
D. This is because the sizes of matrices/vectors in the GRU are dependent on
D. Therefore, when both the average hit rate and computation time are important concerns, we select the dimension to be
. In this case, this hit rate achieves 97.30% with a computation time of only 393 ms. By contrast, when
, the hit rate is 97.65% with a high computation time of 1457 ms. When it is desired to have the fastest computation time and smallest size for storing parameters, the dimension could be
so that the computation time is only 94 ms at the expense of a slightly lower hit rate of 95.27%.
The comparisons of various algorithms for continuous hand gesture recognition are included in
Table 6. It can be observed from the table that the proposed algorithm with the inclusion of transitions for training outperforms the other methods. In fact, its average hit rate compared to the testing set is 11.10% higher than that of its counterpart without the inclusion of transitions (i.e., 97.27% vs. 86.17%). Furthermore, it also has a superior hit rate compared to that of [
13,
16] by 9.82% (i.e., 97.27% vs. 87.45%) and 10.07% (i.e., 97.27% vs. 87.20%), respectively. The algorithms in [
13,
16] do not perform well because they aim at simple arm gestures without transitions. For the recognition of a sequence of finger gestures, the transitions usually occur between two successive gestures. Direct applications of the algorithms in [
13,
16] for finger gestures may then have an inferior performance to the proposed algorithm.


 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}