A New Switched State Jump Observer for Traffic Density Estimation in Expressways Based on Hybrid-Dynamic-Traffic-Network-Model

 ,
,
Abstract
:1. Introduction
2. Hybrid Dynamic Model for Traffic Network
3. Design of the State Jump Observer
4. Case Study: Beijing Jingkai Expressway
4.1. Experiment Parameters Setting
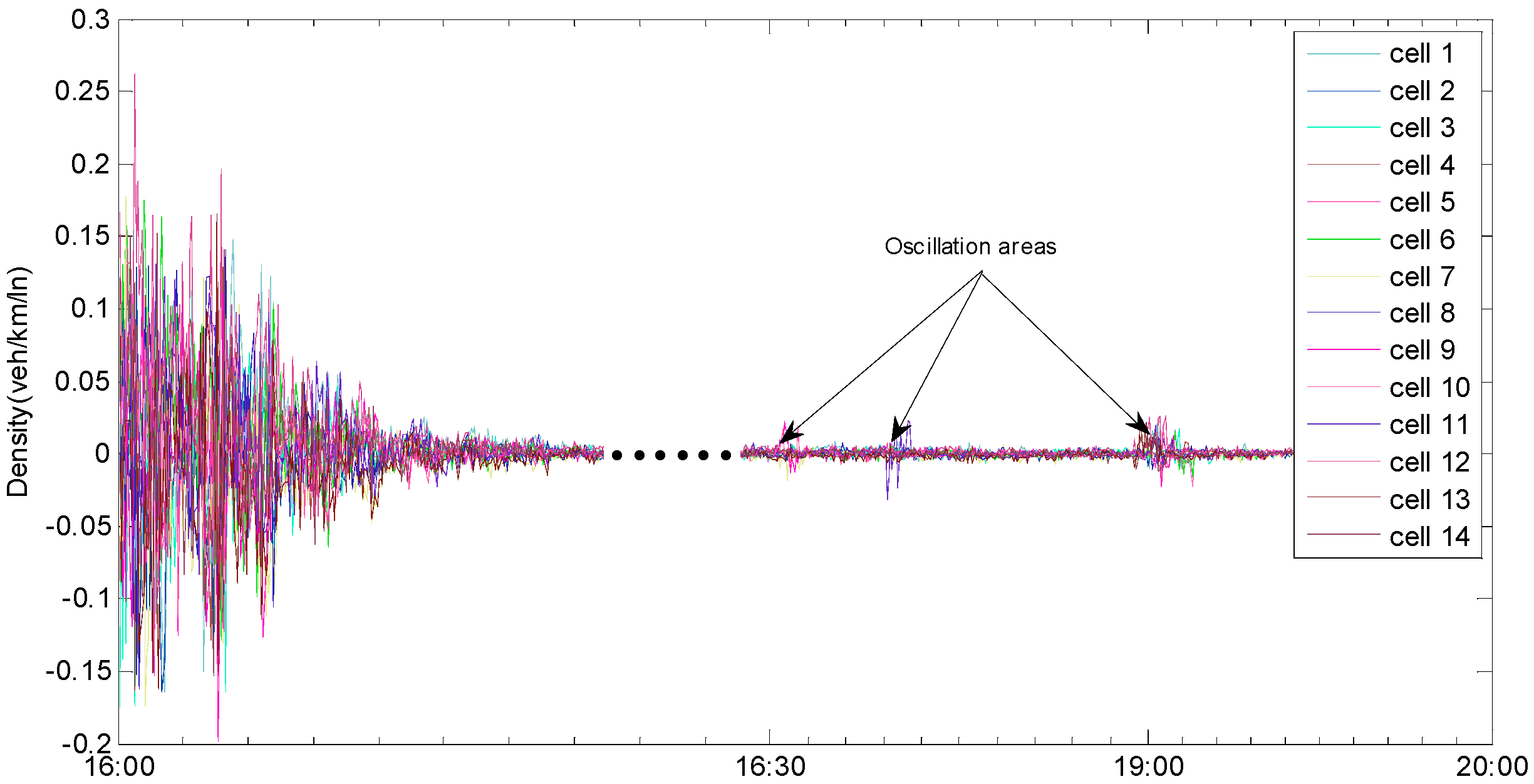
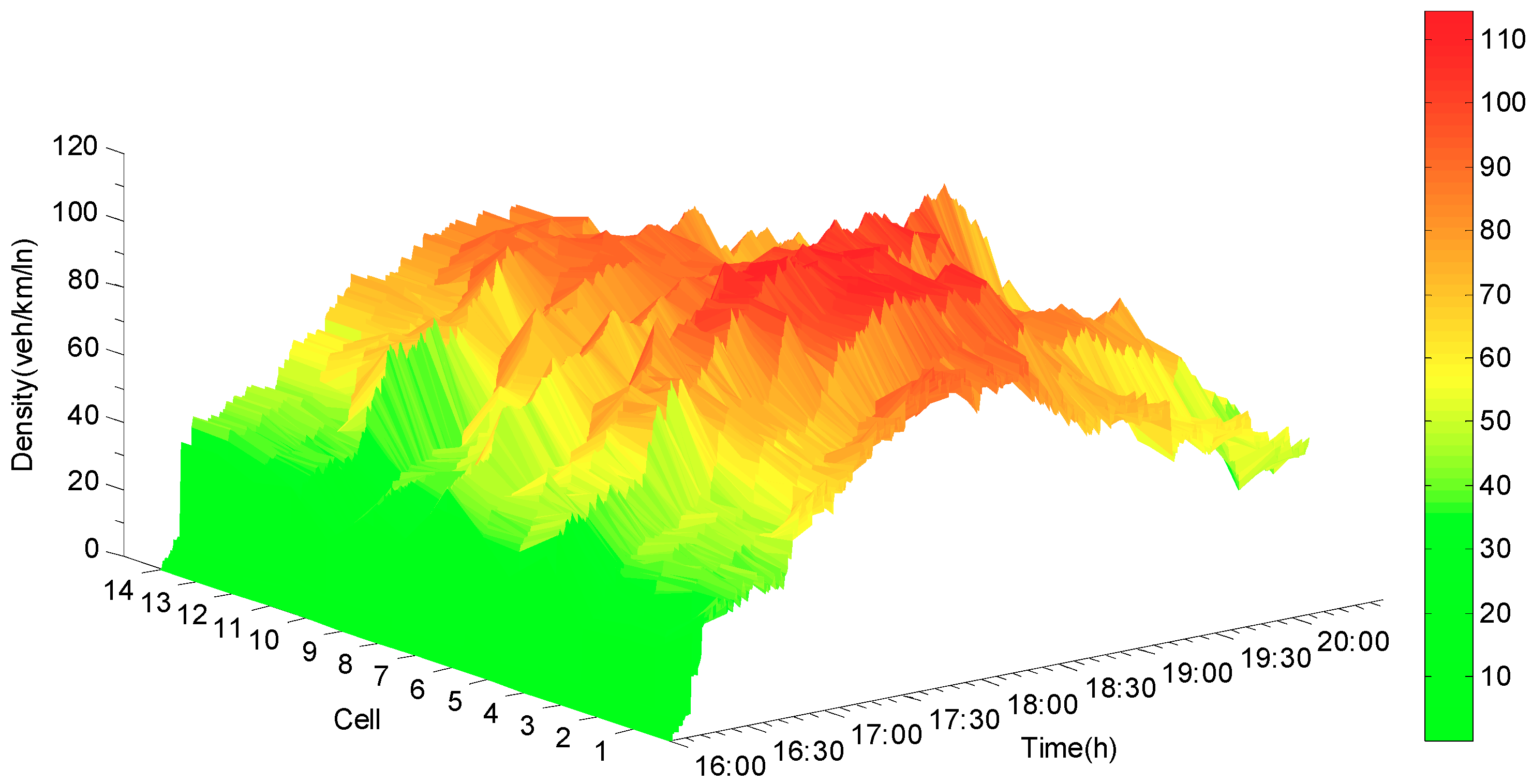
4.2. Analysis Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Daganzo, C.F. The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory. Transp. Res. Part B Methodol. 1994, 28, 269–287. [Google Scholar] [CrossRef]
- Daganzo, C.F. The cell transmission model, part II: Network traffic. Transp. Res. Part B Methodol. 1995, 29, 79–93. [Google Scholar] [CrossRef]
- Sun, X.; Munoz, L.; Horowitz, R. Highway traffic state estimation using improved mixture Kalman filters for effective ramp metering control. In Proceedings of the 42nd IEEE Decision and Control Conference (DCC), Maui, HI, USA, 9–12 December 2003; pp. 6333–6338. [Google Scholar]
- Sun, X.; Munoz, L.; Horowitz, R. Mixture Kalman filter based highway congestion mode and vehicle density estimator and its application. In Proceedings of the American Control Conference (ACC), Boston, MA, USA, 30 June–2 July 2004; Volume 3, pp. 2098–2103. [Google Scholar]
- Canudas-de-Wit, C.; Ojeda, L.L.; Kibangou, A.Y. Graph constrained-CTM observer design for the Grenoble south ring. In Proceedings of the 13th IFAC Symposium on Control in Transportation Systems, Sofia, Bulgaria, 12–14 September 2012; Volume 45, pp. 197–202. [Google Scholar]
- Morbidi, F.; Ojeda, L.L.; Canudas-de-Wit, C.; Bellicot, I. A new robust approach for highway traffic density estimation. In Proceedings of the European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 2575–2580. [Google Scholar]
- Chen, Y.; He, Z.; Shi, J.; Han, X. Dynamic graph hybrid system: A modeling method for complex networks with application to urban traffic. In Proceedings of the 10th Intelligent Control and Automation (WCICA), Beijing, China, 6–8 July 2012; pp. 1864–1869. [Google Scholar]
- Chen, Y.; Li, W.; Guo, Y.; Wu, Y. Dynamic graph hybrid automata: A modeling method for traffic network. In Proceedings of the 18th IEEE International Conference on Intelligent Transportation Systems (ITSC), Canary Islands, Spain, 15–18 September 2015; pp. 1396–1401. [Google Scholar]
- Harary, F.; Gupta, G. Dynamic graph models. Math. Comput. Model. 1997, 25, 79–87. [Google Scholar] [CrossRef]
- Lunze, J.; Lamnabhi-Lagarrigue, F. Handbook of Hybrid Systems Control: Theory, Tools, Applications; Cambridge University Press: New York, NY, USA, 2009. [Google Scholar]
- Henzinger, T.A. The theory of hybrid automata. In Verification of Digital and Hybrid Systems; Springer: Berlin/Heidelberg, Germany, 2000; pp. 278–292. [Google Scholar]
- Chen, Y.; Guo, Y.; Wang, Y. Modeling and density estimation of an urban freeway network based on dynamic graph hybrid automata. Sensors 2017, 17, 716. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Chen, Y.; Zhang, C. Decentralized state-observer-based traffic density estimation of large-scale urban freeway network by dynamic model. Information 2017, 8, 95. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, Y.; Li, W. Traffic density estimation of urban freeway by dynamic model based distributed observer. In Proceedings of the 17th COTA International Conference of Transportation Professionals (CICTP), Shanghai, China, 7–9 July 2017; pp. 60–612. [Google Scholar]
- Guo, Y.; Chen, Y.; Li, W.; Zhang, C. Distributed State-Observer-Based Traffic Density Estimation of Urban Freeway Network. In Proceedings of the IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1177–1182. [Google Scholar]
- Chen, Y.; Guo, Y.; Wang, Y.; Li, W. Modeling freeway network by using dynamic graph hybrid automata and estimating its states by designing state observer. In Proceedings of the Chinese Automation Congress (CAC), Wuhan, China, 27–29 November 2015; pp. 237–242. [Google Scholar]
- Guo, Y. Dynamic-model-based switched proportional-integral state observer design and traffic density estimation for urban freeway. Eur. J. Control 2018, 44, 103–113. [Google Scholar] [CrossRef]
- Wang, Y.; Guo, Y.; Chen, Y. Freeway network density estimation based on Dynamic Graph Hybrid Automata model by using Kalman filter. In Proceedings of the 28th Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 302–307. [Google Scholar]
- Farza, M.; M’Saad, M.; Fall, M.L.; Pigeon, E.; Gehan, O.; Busawon, K. Continuous-Discrete Time Observers for a Class of MIMO Nonlinear Systems. IEEE Trans. Autom. Control 2014, 59, 1060–1065. [Google Scholar] [CrossRef]
- Juloski, A.L.; Heemels, W.P.M.H.; Weiland, S. Observer design for a class of piece-wise affine systems. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 2606–2611. [Google Scholar]
- Alessandri, A.; Coletta, P. Switching observers for continuous-time and discrete-time linear systems. In Proceedings of the IEEE 2001 American Control Conference (ACC), Arlington, TX, USA, 25–27 June 2001; pp. 2516–2521. [Google Scholar]
- Rathinasamy, S.; Karimi, H.R.; Selvaraj, P.; Ren, Y. Observer-based tracking control for switched stochastic systems based on a hybrid 2-D model. Int. J. Robust Nonlinear Control 2018, 28, 478–491. [Google Scholar] [CrossRef]
- Yin, Z.; Guo, H.; Wang, F.; Chen, H.; Lv, K. Design for vehicle velocity estimation based on reduced-order observer. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 6976–6981. [Google Scholar]
- Orihuela, L.; Millán, P.; Vivas, C.; Rubio, F.R. Reduced-order H-2/H-infinity distributed observer for sensor networks. Int. J. Control 2013, 86, 1870–1879. [Google Scholar] [CrossRef]
- Dem’yanov, D.N. Analytical synthesis of reduced order observer for estimation of the bilinear dynamic system state. In Proceedings of the 2017 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), St. Petersburg, Russia, 16–19 May 2017; pp. 1–5. [Google Scholar]
- Kim, T.; Shim, H.; Cho, D.D. Distributed Luenberger observer design. In Proceedings of the IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 6928–6933. [Google Scholar]
- Ni, W.; Wang, X.; Yang, J.; Xiong, C. Distributed Luenberger observers for linear systems. In Proceedings of the IEEE 10th World Congress on Intelligent Control and Automation (WCICA), Beijing, China, 6–8 July 2012; pp. 4267–4271. [Google Scholar]
- Han, W.; Trentelman, H.L.; Wang, Z.; Shen, Y. A Simple Approach to Distributed Observer Design for Linear Systems. IEEE Trans. Autom. Control 2019, 64, 329–336. [Google Scholar] [CrossRef]
- Ifqir, S.; Ichalal, D.; Oufroukh, N.A.; Mammar, S. Robust interval observer for switched systems with unknown inputs: Application to vehicle dynamics estimation. Eur. J. Control 2018, 44, 3–14. [Google Scholar] [CrossRef]
- Nguyen, C.M.; Pathirana, P.N.; Trinh, H. Robust observer-based control designs for discrete nonlinear systems with disturbances. Eur. J. Control 2018, 44, 65–72. [Google Scholar] [CrossRef]
- Zhang, L.; Mao, X. Vehicle Density Estimation of Freeway Traffic with Unknown Boundary Demand–Supply: An IMM Approach. IET Control Theory Appl. 2015, 9, 1989–1995. [Google Scholar] [CrossRef]
- Zhang, L.; Prieur, C. Stochastic stability of Markov jump hyperbolic systems with application to traffic flow control. Automatica 2017, 86, 29–37. [Google Scholar] [CrossRef] [Green Version]
- Pettersson, S. Switched state jump observers for switched systems. IFAC Proc. Vol. 2005, 38, 127–132. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Ferron, E.; Balakrishnan, V. Linear Matrix Inequalities in Systems and Control Theory; SIAM: Philadelphia, PA, USA, 1994; pp. 7–35. [Google Scholar]
- Yakubovich, V.A. The S-procedure in Nonlinear Control Theory. Vestn. Leningr. Univ. Ser. Mat. 1971, 1, 62–67. [Google Scholar]
- Strang, G. Linear Algebra and Its Applications; Harcourt Brace Jovanovich College Publishers: San Diego, CA, USA, 1988. [Google Scholar]
- Contreras, S.; Kachroo, P.; Agarwal, S. Observability and sensor placement problem on highway segments: A traffic dynamics-based approach. IEEE Transp. Intell. Trans. Syst. 2016, 17, 848–858. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | Cell | Length | Link | Cell | Length |
|---|---|---|---|---|---|
| 1 | 1 | 230 m | 3 | 8 | 260 m |
| 2 | 230 m | 9 | 260 m | ||
| 2 | 3 | 246 m | 4 | 10 | 270 m |
| 4 | 246 m | 11 | 270 m | ||
| 5 | 246 m | 5 | 12 | 230 m | |
| 6 | 246 m | 13 | 230 m | ||
| 7 | 246 m | 6 | 14 | 260 m |
| Cell Number | Cell 1 | Cell 2 | Cell 3 | Cell 4 | Cell 5 | Cell 6 | Cell 7 |
|---|---|---|---|---|---|---|---|
| RMSE | 0.0096 | 0.047 | 0.067 | 0.018 | 0.0096 | 0.0085 | 0.011 |
| Cell Number | Cell 8 | Cell 9 | Cell 10 | Cell 11 | Cell 12 | Cell 13 | Cell 14 |
| MPE | 0.0087 | 0.034 | 0.0097 | 0.026 | 0.032 | 0.0079 | 0.025 |
| Mean Value of MPE | 0.022 | ||||||
| Cell Number | Cell 1 | Cell 2 | Cell 3 | Cell 4 | Cell 5 | Cell 6 | Cell 7 |
|---|---|---|---|---|---|---|---|
| RMSE | 0.0083 | 0.026 | 0.033 | 0.015 | 0.0091 | 0.0073 | 0.009 |
| Cell Number | Cell 8 | Cell 9 | Cell 10 | Cell 11 | Cell 12 | Cell 13 | Cell 14 |
| MPE | 0.0081 | 0.028 | 0.0086 | 0.019 | 0.029 | 0.0068 | 0.023 |
| Mean Value of MPE | 0.016 | ||||||
| Cell Number | Cell 1 | Cell 2 | Cell 3 | Cell 4 | Cell 5 | Cell 6 | Cell 7 |
|---|---|---|---|---|---|---|---|
| RMSE | 1.48 | 3.39 | 3.92 | 1.84 | 2.08 | 1.76 | 2.00 |
| Cell Number | Cell 8 | Cell 9 | Cell 10 | Cell 11 | Cell 12 | Cell 13 | Cell 14 |
| RMSE | 2.36 | 2.85 | 1.73 | 2.27 | 2.99 | 1.65 | 2.30 |
| Mean Value of RMSE | 2.33 | ||||||
| Cell Number | Cell 1 | Cell 2 | Cell 3 | Cell 4 | Cell 5 | Cell 6 | Cell 7 |
|---|---|---|---|---|---|---|---|
| RMSE | 1.34 | 2.29 | 2.42 | 1.28 | 1.42 | 1.66 | 1.73 |
| Cell Number | Cell 8 | Cell 9 | Cell 10 | Cell 11 | Cell 12 | Cell 13 | Cell 14 |
| RMSE | 2.34 | 2.79 | 1.62 | 1.91 | 2.35 | 1.18 | 1.92 |
| Mean Value of RMSE | 1.88 | ||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zha, W.; Guo, Y.; Wu, H.; Sotelo, M.A.; Ma, Y.; Yi, Q.; Li, Z.; Sun, X. A New Switched State Jump Observer for Traffic Density Estimation in Expressways Based on Hybrid-Dynamic-Traffic-Network-Model. Sensors 2019, 19, 3822. https://doi.org/10.3390/s19183822
Zha W, Guo Y, Wu H, Sotelo MA, Ma Y, Yi Q, Li Z, Sun X. A New Switched State Jump Observer for Traffic Density Estimation in Expressways Based on Hybrid-Dynamic-Traffic-Network-Model. Sensors. 2019; 19(18):3822. https://doi.org/10.3390/s19183822
Chicago/Turabian StyleZha, Wenbin, Yuqi Guo, Huawei Wu, Miguel Angel Sotelo, Yulin Ma, Qian Yi, Zhixiong Li, and Xin Sun. 2019. "A New Switched State Jump Observer for Traffic Density Estimation in Expressways Based on Hybrid-Dynamic-Traffic-Network-Model" Sensors 19, no. 18: 3822. https://doi.org/10.3390/s19183822