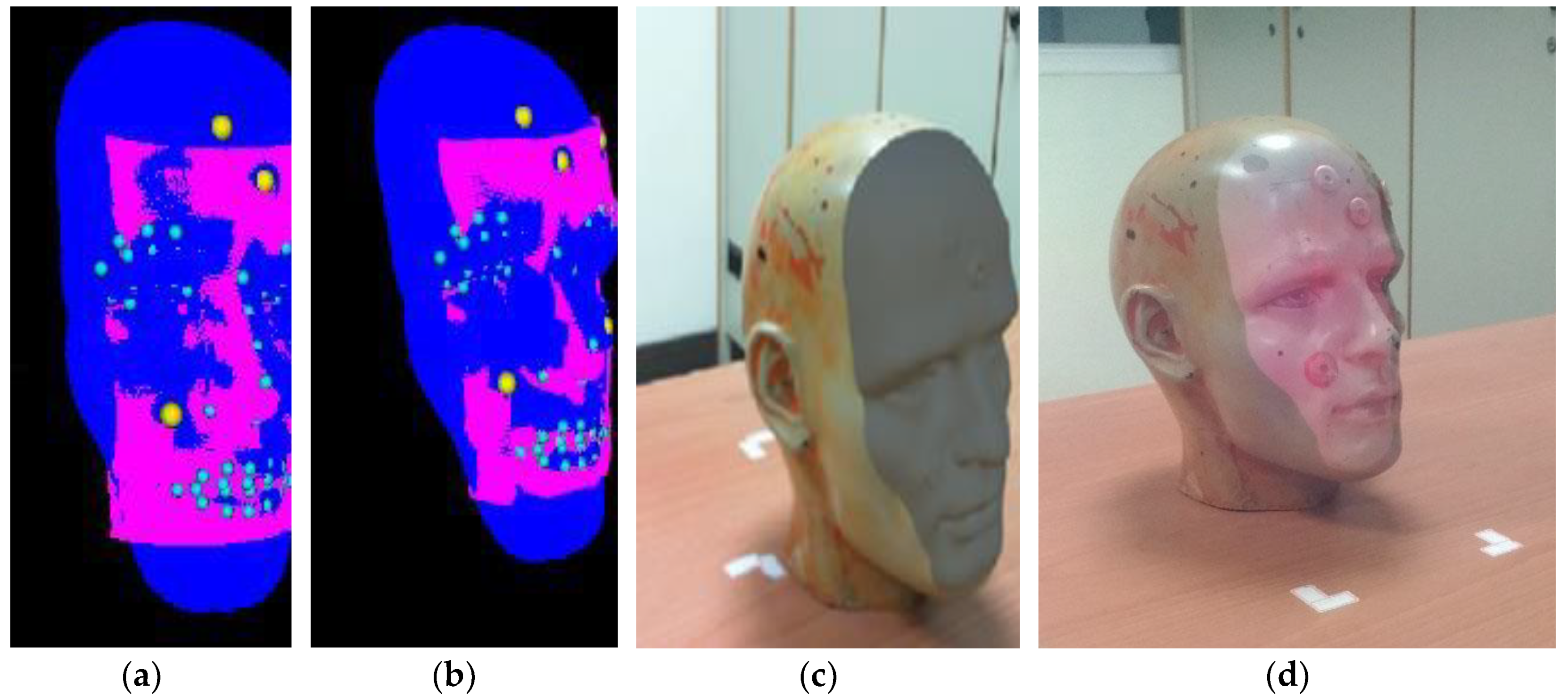
A dummy head was used to simulate the patient’s head. A set of CT scans using Intel RealSense [
11] sensor were performed on the dummy head in order to obtain a stack of images which were processed to build a 3D model of the dummy head, these constituted the reference set data, R. The Intel RealSense RGB-Depth sensor was used to obtain the patient’s surface data points, and Point Cloud Library was used to reconstruct the 3D information of the patient’s surface as the floating data point set F
1. This process was repeated again to obtain a second floating points set, F
2. So we had the reference dataset, R, and the floating data point sets, F
1 and F
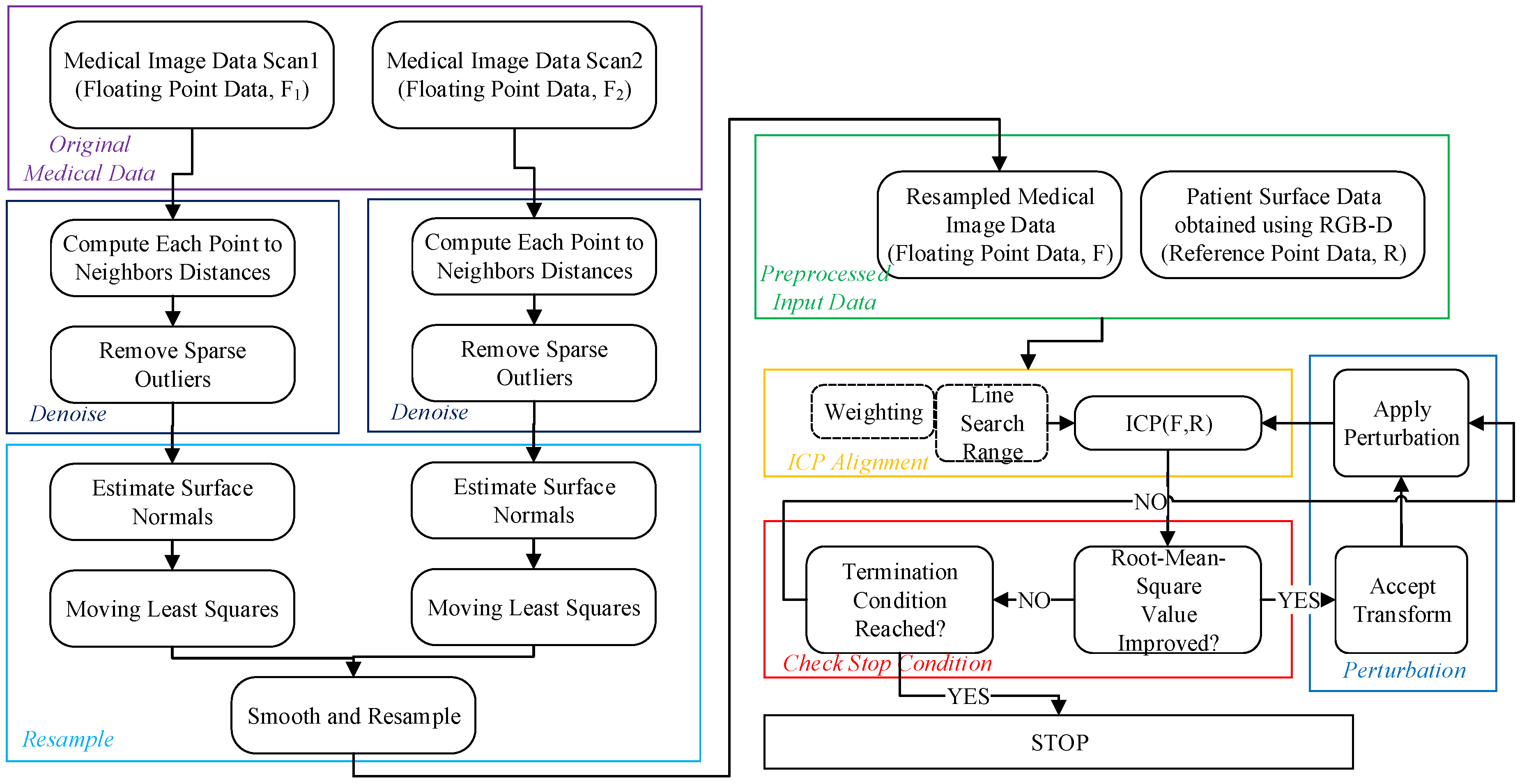
2. The DRWP-ICP algorithm first performed preprocessing of the floating datasets by denoising then resampling to achieve a more accurate floating dataset, F. Then the DRWP-ICP performed a weighted line search scheme [
12] to match each point in the floating dataset to the reference dataset. The purpose of the weighting, which was proportional to the distance of the corresponding points in the floating dataset and the target dataset, was to prevent the accumulation of errors when multiple floating points match the same target point. However, a weighted line search could still result in reaching local minima rather than the global minimum, so a perturbation scheme was added to escape from the local minima. Once the floating dataset was matched to the reference dataset, the resulting data points were displayed on the doctor’s HoloLens headwear by aligning and overlaying the virtual data to the actual patient’s skin surface. The flowchart of the DRWP-ICP is shown in
Figure 1 below.
The DRWP-ICP Procedure
Step 1. Data Input. The pre-operative medical/CT image was the set of reference points R, and the patient’s surface data captured by the RGB-Depth sensor was the set of floating points, F1 and F2.
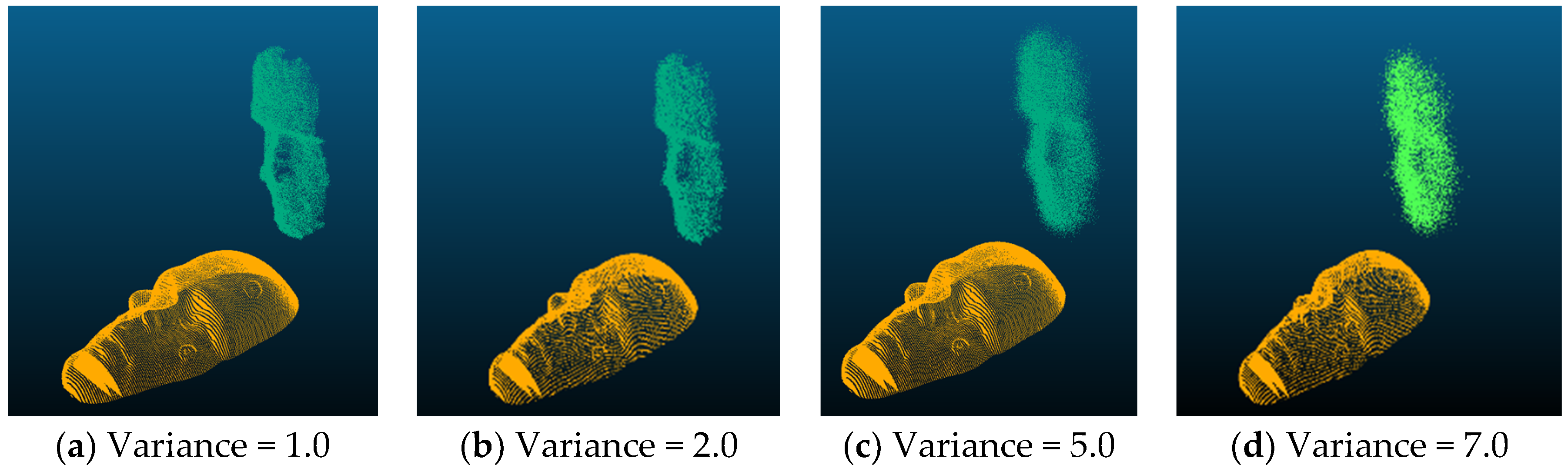
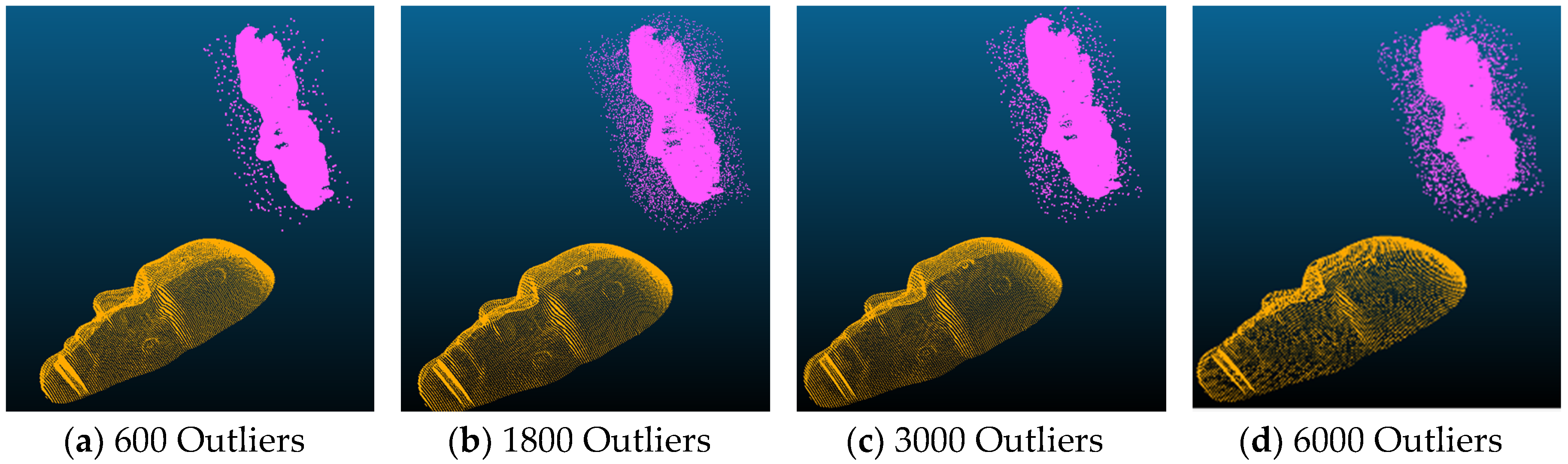
Step 2. Floating Data Processing by Denoising and Resampling. The main idea in the denoising stage was to use a statistical filter on the neighborhood of each data point and remove points that did not meet certain criteria. The sparse outlier removal method was based on the calculation of the distance distribution from the point in the input data to the adjacent point. The statistical filter assumed that the average distance between all points in the point cloud and the nearest K neighbors satisfies the Gaussian distribution. According to the mean variance, a distance threshold can be determined. When the average distance between a point and the nearest K points was greater than this the threshold, the points beyond this threshold were then removed. First the average distance between each point and its nearest K neighbors was calculated, and then the mean μ and standard deviation σ of all the average distances were calculated. The distance threshold can be defined as:
where α is a constant known as the scale factor and its values depend on the number of neighbors. Finally each point whose distance was greater than d
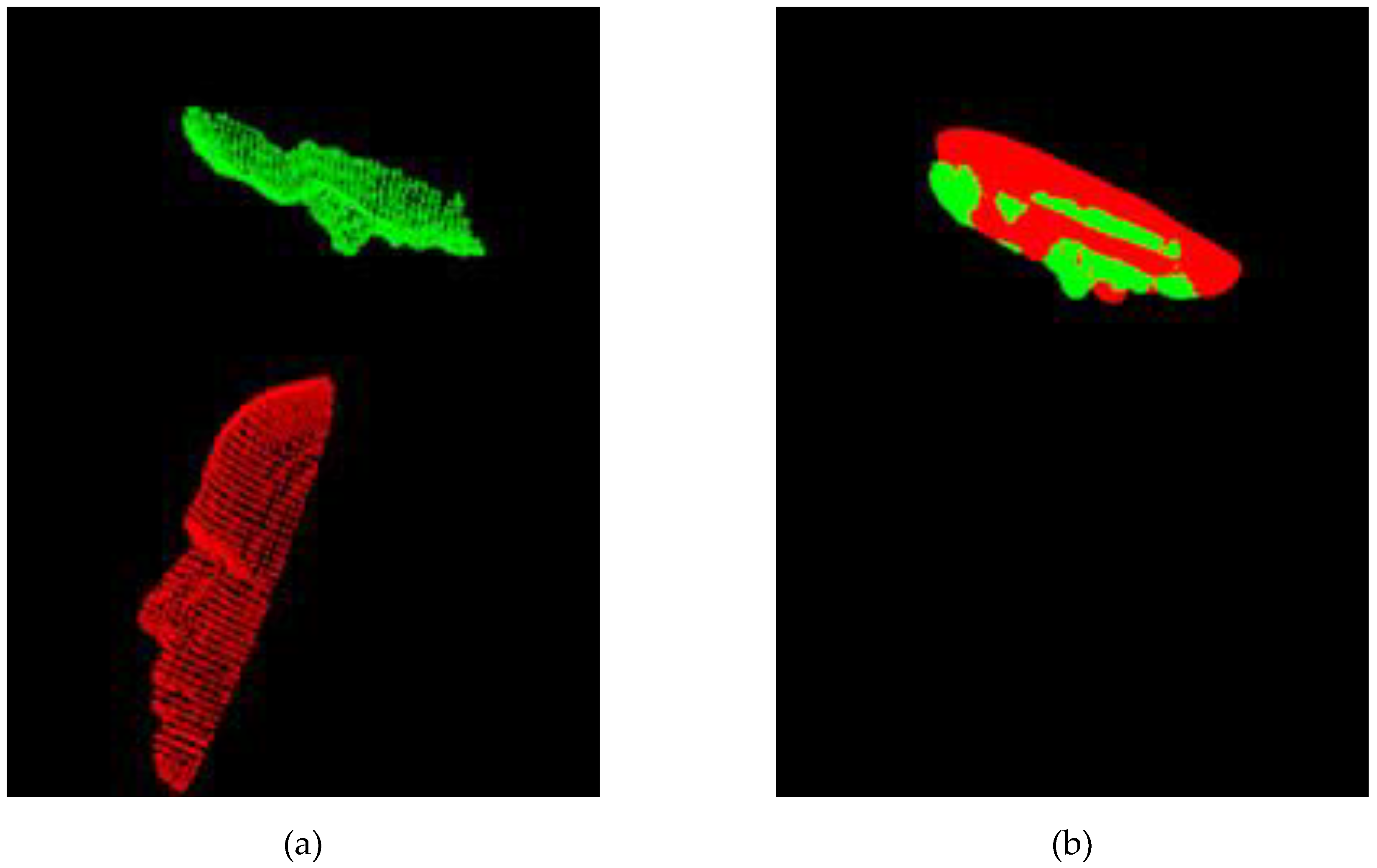
max was removed. In the resampling stage, the main idea was to use a moving least squares surface reconstruction method [
13] to smooth and resample the noisy data. This algorithm attempted to reconstruct the missing portion of the surface by high-order polynomial interpolation between surrounding data points. First, the corresponding surface was obtained from the acquired point cloud data set, and then the surface normal was calculated from the model. The solution for estimating the surface normal was simplified by analyzing the eigenvectors and eigenvalues (or PCA—principal component analysis [
14]) of the covariance matrix from the nearest neighbor of the query point. The purpose of the surface normal estimation was to first obtain the nearest neighbor element of point p and then calculate the surface normal n of point p. Then we checked whether the direction of n was consistently pointing to the viewpoint. If not, it was flipped. The viewpoint coordinates were preset to (0,0,0). The least squares method is a global method, which cannot meet the requirements for localized processing, and it can cause difficulty in model setting and computational instability for a large number of point data. Therefore, this method used the moving least squares method to solve the registration problem. The scatter adaptability also has the advantages of local curve fitting, being adaptable to distributed difference characteristics, as well as having a high precision. The moving least squares method divided the region into meshes, then looped through each point in the mesh to compute the shape function at each node, then finally connected the nodes to form a fitted curve surface. This was done for both floating datasets, then the data were resampled from both datasets to generate a smoother, more accurate floating dataset, F.
Step 3. ICP Alignment. For any given point f in F, we found its nearest corresponding point r in R by calculating the minimum distance between f and each possible r, d. Then weight values were assigned to each pair in the same group of data that matches the same reference point, then the min value was calculated according to the following:
where
NB is the total number of points in the floating data set, and
NC is the number of points to be excluded. This number was determined after sorting
di in order to reduce the overall complexity. Then the weight was assigned as follows:
After the assignments were completed, then the objective function which seeks to minimize the root mean square (RMS) value, was calculated. The way to evaluate the objective function was similar to gradient descent, so in order to speed up the search, the line search method was implemented, which searched in the nonlinear space of the objective function, F, in order to arrive at a minimum faster. If the solution was accepted, then a transformation matrix T’ was obtained by the ICP algorithm, and if the RMS value calculated was less than the previous iteration, then T’ replaced the currently optimal transformation matrix T, then automatically jumped to the perturbation stage. Otherwise, whether the stop condition had been reached had to be determined first.
Step 4. Stop Condition. The stop condition was so that if the RMS value is less than a preset threshold, or if the number of iterations so far was greater than a preset value, then the stop condition was determined to be reached, and the algorithm stopped.
Step 5. Perturbation. If we let T
init be the initialization transformation T before the ICP begins and let the T
temp be the transformation matrix for the converged solution, then the range to explore for T
temp would be in the range of r, where
since T
init and T
temp are both 4 × 4 transformation matrices, the range of r represents the range of possible discrete 4 × 4 transforms. Now suppose T
temp only reached a local minimum, then the transformation for perturbation was chosen from the range of r, where probability of being selected was:
where α is the scaling factor to help expand the perturbation range if the current search range was not sufficient to escape from a local solution.
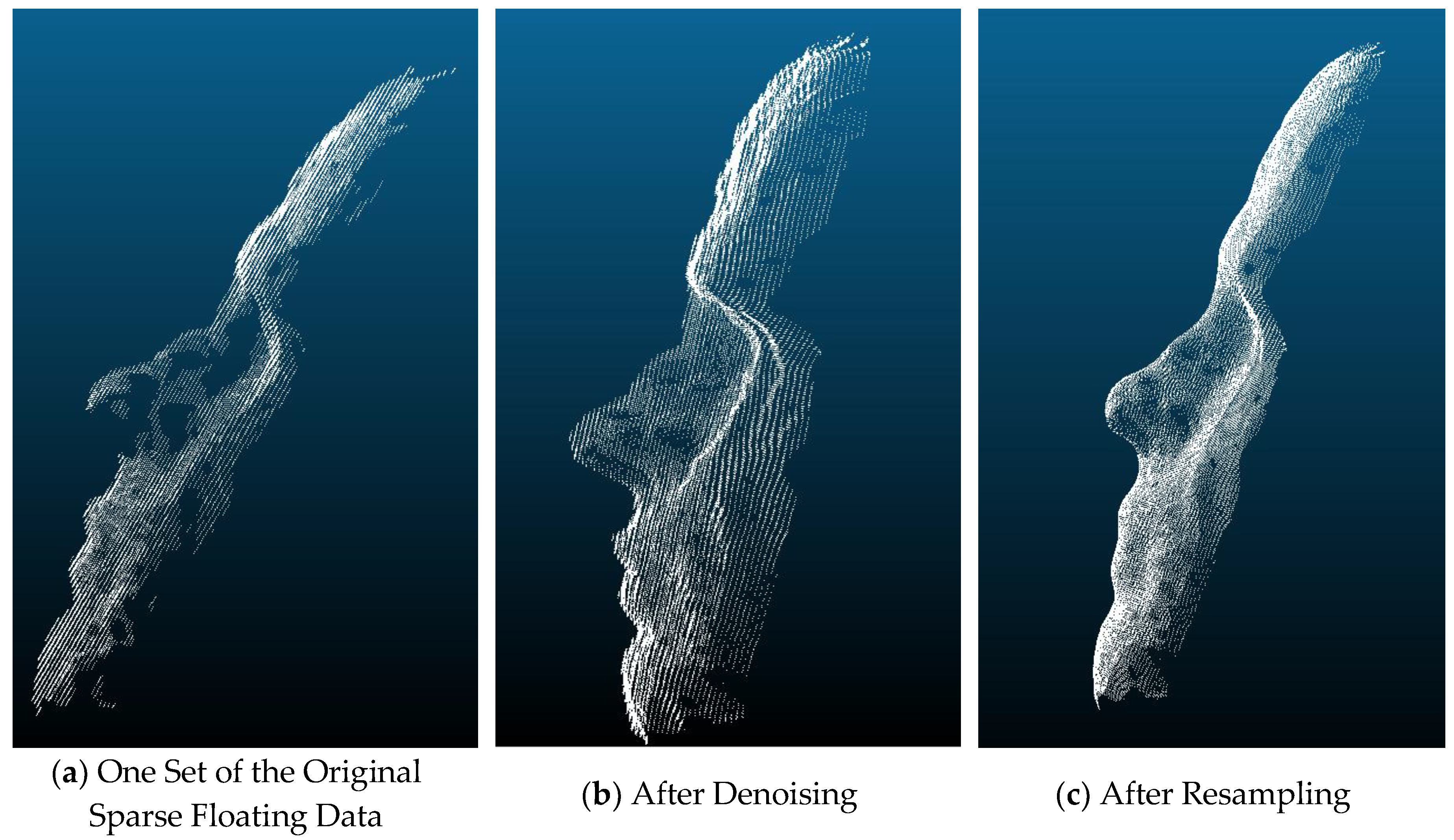
The illustrations for the effects of denoising and resampling can be seen below in
Figure 2.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}