1. Introduction
Industrial robot arms in human–machine interaction applications must conform to the safety standards of ISO 15066 [
1], which require robot arms to decelerate or fully cease movement when humans are present within their working range. For this reason, the design of collaborative robot arms often includes safety features, such as shock-absorbing series elastic actuators [
2] at their joints, or flexible mechanisms, such as the one used by “Baxter” of Rethink Robotics [
3], to dampen the force of impact by changing the shape of the joints, thereby reducing the damage incurred during unexpected collisions. Another approach is to install sensors that can detect external contact and supplement them with impedance control to improve safety during human–machine interactions. In the literature, robot arms chiefly detect forces through the following three methods:
- (1)
Force or torque sensor: This type of sensor is usually installed on an end-effector to measure the contact force on end-of-arm tooling. It is suitable for operations that require high-precision force control on workpieces, such as grinding and polishing [
4]. The sensor has the advantage of being highly adaptable and easy to install, but it can only detect the force on the end-of-arm tooling, meaning that it cannot detect possible collisions. Few studies have installed Force/Torque (F/T) sensors on the socket of a robot arm to enable the real-time detection of impulse force on an unspecified location to maintain safety in the case of collision [
5]; the FANUC CR-35iA [
6] is one example.
- (2)
Joint torque sensor: This type of sensor is installed on joints and usually calculates torque according to the deformation of moveable components in a joint; the KUKA LWR uses such a sensor [
7]. Its advantage is that it can detect the force applied on each joint; however, it complicates joint design and increases costs.
- (3)
Virtual force sensor: This type of sensor measures the external torque resulting from an external contact force by calculating the difference between the theoretical torque of the system model in motion and the torque generated by the actual movement of the robot arm. This type of sensor is used in Universal Robots, which perform motor current monitoring for safety control [
8], and has the advantages of not requiring additional force sensors and being capable of detecting the torque condition of each joint. However, it is reliant on a high-precision system model and involves complicated kinematic calculations.
F/T sensors are sold at approximately one-tenth of the price of collaborative robot arms (approximately US$ 300). Although this may be an acceptable price for automated industrial applications, it is too expensive for low-cost service applications. Therefore, sensorless force detection methods are more suitable for service applications that do not require high levels of precision.
Studies on virtual force sensors have primarily employed two approaches for internal sensors to detect a force. One is the use of position sensors, which compare differences in position and velocity to estimate the external torque generated by the motor. The other is the use of current sensors, which measure the difference in a controlled current to calculate an external torque.
Table 1 presents a comparison of these studies. High precision is not required in force-sensing operations for impedance control or collision detection; thus, torques can be estimated according to the differences in position and velocity without a system model [
9]. By contrast, controlling contact force requires precise information of the force, which requires a system model and status information obtained by performing high-precision calculations [
10].
Because the control of robot arms requires high precision, it usually employs a high-gain closed-loop system to reduce position errors. This results in high stiffness in the control system, for which reason most collaborative robot arm designs employ flexible joints to absorb external impact forces in a short time and reduce the damage caused by collision. However, flexible joints are a mechanism with a fixed elastic coefficient, which makes them too rigid to adapt to different applications. Moreover, flexible joints are prone to vibration, which affects the precision of control, rendering motor control difficult and increasing the costs of development and production.
In this study, a self-developed low-cost rigid robot arm was employed for force control, and the sensors used were three Hall sensors and a current sensor for each joint. Because low-resolution position sensors provide an insufficient sampling of velocity, thus rendering the calculation of contact forces through high-precision feedback impossible, an open-loop dynamic compensator was added to resolve this problem. For velocity and acceleration, sensor feedback was replaced by motion commands, and dynamic equations were used to calculate the torque required for motion control, allowing direct control of the torque compensation for the motor. After applying torque compensation, the closed-loop controller only needed to correct control errors. This enabled the estimation of an unknown external torque with only current errors. Calculating external contact forces using the system model enabled the use of a small number of sensors for force data.
For safety considerations in human–machine interactions, we proposed a control method that could alter the rigidity of the robot arm by adding a torque saturation limiter to the servo actuator on each axis for the purpose of restraining torque output. This method employs a contact force observer for real-time measurement of contact forces and adjusts the torque saturation to restrain the maximum torque output of each joint, thereby controlling the robot arm’s force output to remain within a safe range. Although this method offers lower precision in force control, it does not involve inverse kinematic calculations or additional revision of the controller structure. Therefore, it effectively reduces the complexity of controller design and processor costs without the need for additional force sensors or flexible mechanisms. For low-cost, rigid service robots and associated applications, this was a solution that can enhance the safety and basic force control of a robot arm without increasing the number of sensors required or hardware costs.
3. Safety Force Controller for Collaborative Robot
Robot arms that require high-precision control must employ a high-stiffness control loop. The impedance control of contact forces coming from unspecified locations requires the use of additional force sensors to measure a contact force, thus changing the robot arm’s target position and movement trajectory and achieving force control (e.g., Cartesian impedance control [
17] or admittance control [
22]). Because this method requires real-time inverse kinematic calculations for the displacement of each joint, the controller used must be capable of advanced computation and real-time communication.
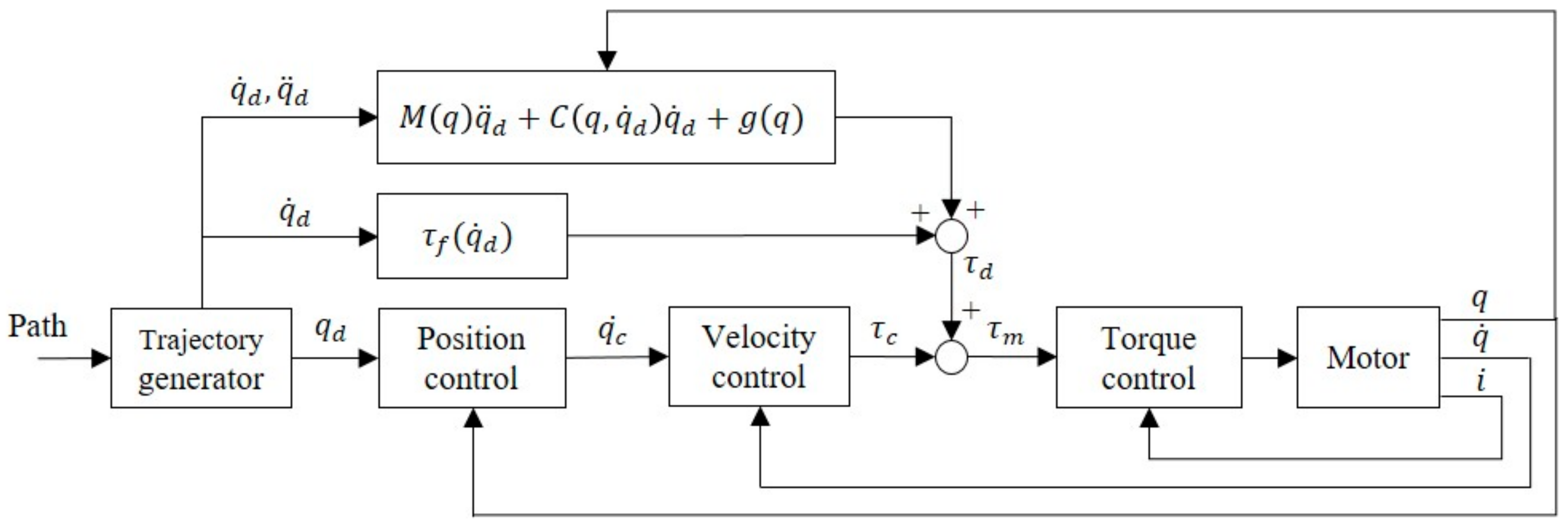
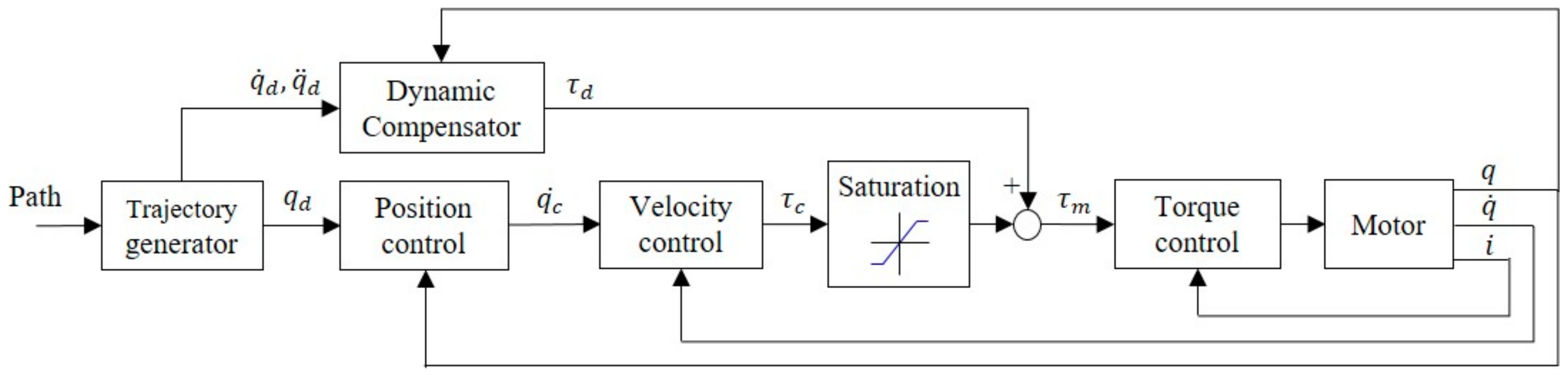
Figure 8 presents the control diagram of this method.
In the design of a general purpose motor drive, torque saturation is used in the calculation of final torque output, as shown in
Figure 8. However, in the applications of a robot arm, the motor must maintain a torque that is sufficient to resist gravity at all times. Any attempt to lower torque saturation or turn off torque output can cause the robot arm to lose power and drop, which is dangerous. For this reason, the emergency stop procedure generally requires a brake to be activated as soon as the motor’s power is cut in order to lock the robot arm in its current position and prevent it from falling on something or someone. Nevertheless, an emergency lock-up can cause the robot arm to pin a person or workpiece in place, resulting in unwanted damage. Therefore, this stopping procedure is not exactly safe. This section presents a safe torque control method to resolve this problem.
3.1. Torque Saturation Design
To realize safe robot arm control, the torque saturation limiter in the motor drive is moved in front of the compensator, thereby limiting only the output of the servo controller (
Figure 9). In this position, the stiffness of the control system can be changed by tuning the torque saturation without needing to alter the parameters of the closed-loop controller.
During an emergency, the controller can issue a command to cease motion control. Additionally, it can reduce or cease the servo motor’s torque output in a timely manner. With limited torque from the motor, the dynamic compensator can generate a gravity torque, thus maintaining the balance of the robot arm and rendering brake activation unnecessary. Moreover, because the output of the closed-loop controller is restrained, the robot arm can easily be moved by an external force, making it possible to immediately move the robot arm away from a danger zone. This effectively prevents collisions that can lead to injury or damage.
3.2. Impedance and Force Control
Robot arm control can enhance safety by reducing controller gain from a closed-loop system, such as through the application of joint impedance control. The joint control torque can be expressed as Equation (11), where
is the position control gain and
is the velocity control gain. However, reducing controller gain also reduces the precision of position control. When an application requires different levels of precision and stiffness, changing between different control settings is difficult; moreover, the gain of each joint must be adjusted repeatedly.
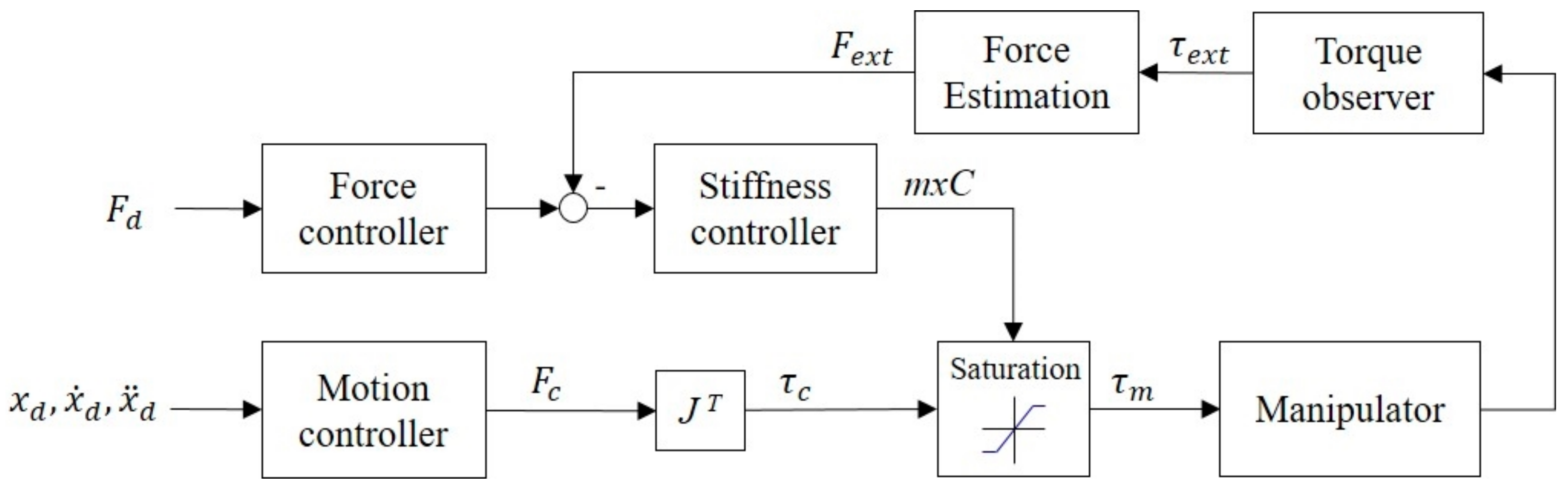
We hereby present a joint impedance control method that only changes torque output by regulating torque saturation and does not involve the reduction of controller gain. It achieves impedance control without needing to engage in time-consuming parameter adjustment, as is the case for the conventional method. A contact force observer detects the magnitude of a force in real time. When the force is excessively strong, it regulates the torque saturation to reduce the torque output. Because this approach does not involve inverse kinematic calculations, it reduces the burden of the controller system. The cycle for force estimation and force control is 20 ms (
Figure 10).
Under this framework of stiffness control, torque saturation is one simple parameter that applies to all axes. The control parameter of the torque saturation limiter is defined as the maximum torque control threshold,
mxC. Therefore, the estimation of a contact force cannot be achieved according to the force’s components along each axis. Instead, it has to be achieved using the scalar of the resultant force, as expressed in Equation (12), where
are estimated forces on the
x,
y,
z-axis, respectively. Specifically, a contact force observer is used to measure the resultant force at work, and then the torque saturation is regulated to limit the torque output of the joints, and thus achieve low-precision contact force control.
3.3. Safety Collision Detection
In applications that involve human–machine interactions, robot arms share the working space with human workers, rendering them prone to collisions. For this reason, collision detection is a critical safety feature for collaborative robot arms. The
BG/BGIA Risk Assessment Recommendations According to Machinery Directive: Design of Workplaces with Collaborative Robots advises the safe range of external forces on different regions of the human body [
23]. The lowest is on the neck (front), which is 35 N.
Table 3 offers a more detailed list of these data.
Therefore, the design of the safety controller adopted 35 N as the safety threshold for contact forces. When the contact force observer determines that a contact force is greater than this threshold, the controller reduces
mxC to lower the torque output in joints, thereby decreasing the contact force of a robot arm. Because the contact force observer can only estimate a resultant force that is equivalent to the force on the end-effector, to prevent contact force on an unspecified location from generating an excessively large torque, an adjustable safety threshold is introduced to the external torque observer on each axis to reduce
mxC when control torque exceeds this threshold. When the cumulative joint position error of a robot arm in motion, which is generated by reduced stiffness, exceeds a predetermined following error, the controller triggers an alarm that stops motion control and switches off the torque output. At this moment, only the gravitational torque compensation of the robot arm is in a state of zero gravity, facilitating the process of swinging the robot arm away to reduce the damage caused by collision. The operation cycle of the controller is set at 20 ms.
Figure 11 details the logical architecture of the controller.
4. Experiment and Results
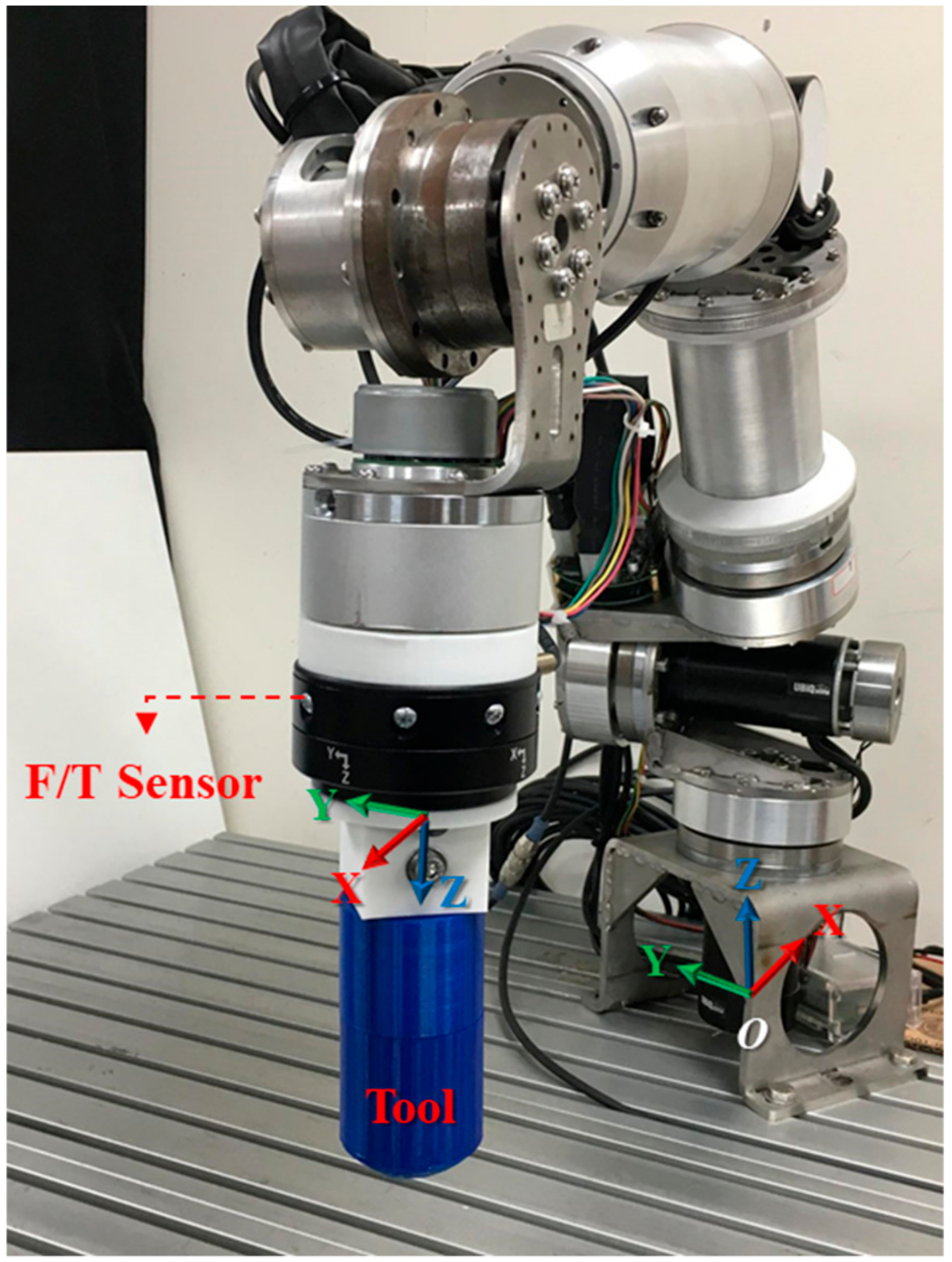
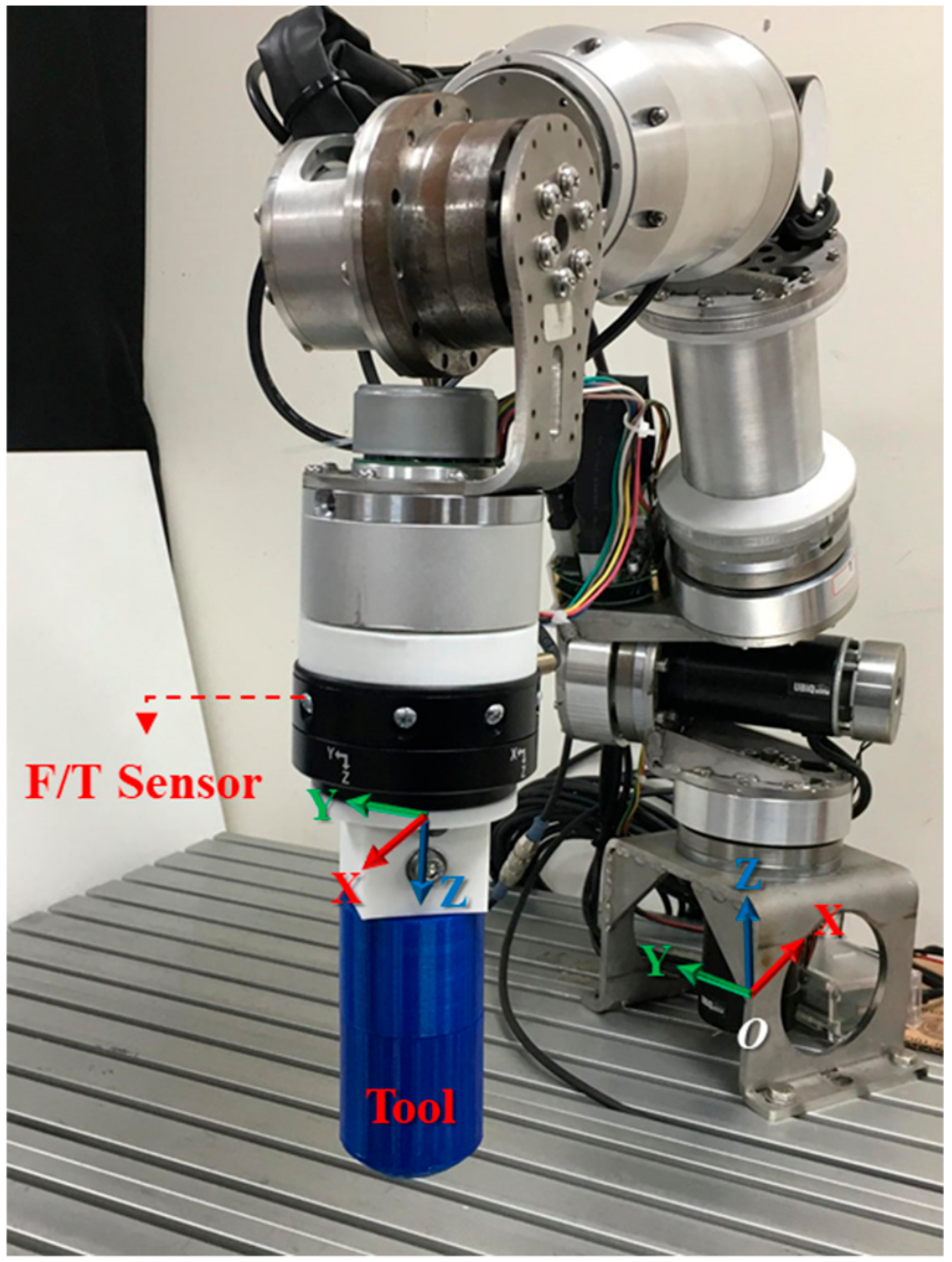
In the experiments, this study used a self-developed seven-axis robot arm, which exhibited concise design with low-functionality components to conduct experiments to verify the validity of this study. The specification of the robot arm is shown in
Table 4. To reduce the size of controller, this study used embedded drivers designed from a development board of Field-Programmable Gate Array (FPGA) and used open-source software to design real-time controllers prioritizing low cost and employed the Raspberry Pi 3 Module B and Linux Ubuntu MATE system accompanied by a RTOS Xenomai 3 [
24]. A Robotiq FT300 sensor was used to collect the data of contact forces on the end-effector to determine the accuracy of force detection and control in this experiment.
4.1. Collision Detection and Safety Control
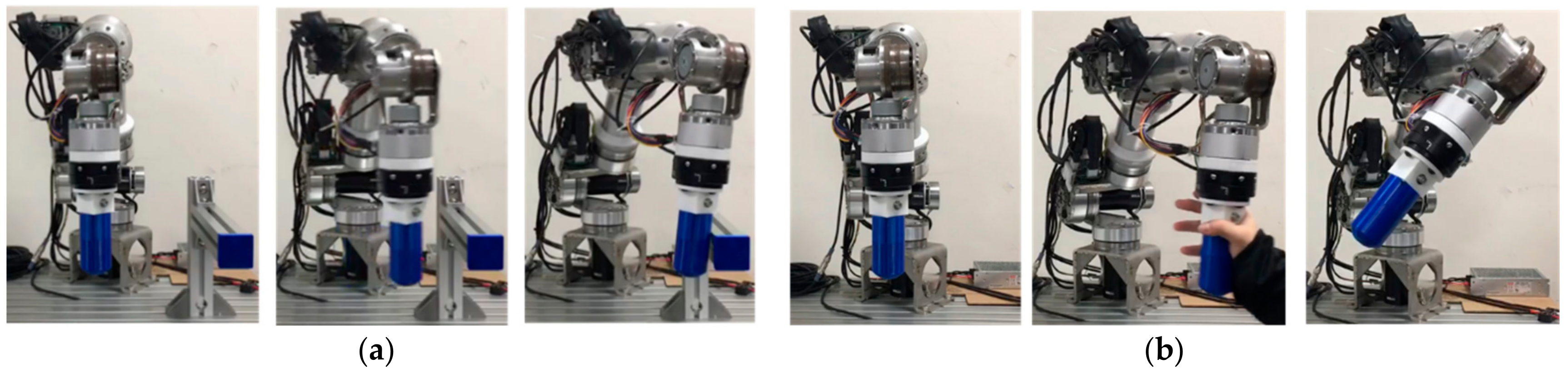
Force detection was divided into two experiments, each with different detection conditions (
Figure 12):
(a) Collision detection: The robot arm moved along the Y-axis to Y = −0.22 m at a linear velocity of 100 mm/sec. An object was placed at Y = −0.15 m for collision with the robot arm.
(b) External force detection: The robot arm moved along the Y-axis toward the negative plane at a linear velocity of 100 mm/s, and throughout the duration, an external force along the Y-axis toward the positive plane was exerted on the robot arm.
4.2. Experiment 1: Collision Detection
The collision detection experiment consisted of two parts. The first was conducted without safety control, and the results are presented in
Figure 13a. The collision occurred at
t = 1.5 s, and the force of the collision was determined to be approximately 60 N, which exceeds the safety threshold of 35 N. Therefore, the force control was deemed unsafe.
Safety control was introduced in the second part of the experiment and the results are presented in
Figure 13b; thus, when the robot arm detected a contact force greater than the safety threshold of 35 N at
t = 1.6 s, the controller automatically reduced system stiffness to reduce the contact force to within the threshold at
t = 2.1 s. Comparing two results, the robot arm reduced its system stiffness at collision and completed safety protection measures at approximately 500 ms, reducing the contact force to within the safety threshold. This result demonstrates the usefulness of force detection and stiffness control in collision protection.
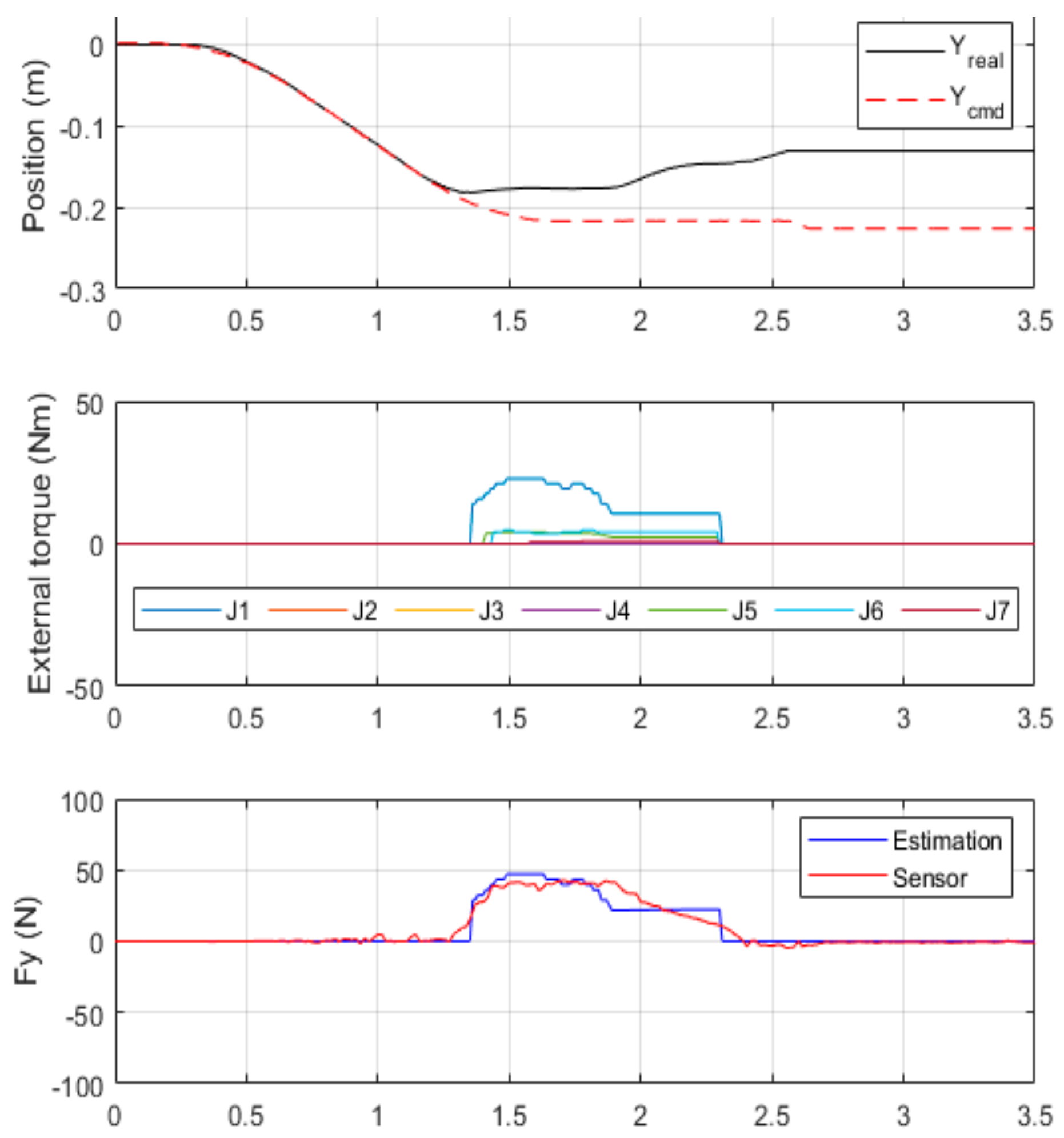
4.3. Experiment 2: External Force Detection
When a robot arm in motion comes into contact with an unknown external force, it first lowers its stiffness to reduce the contact force to less than the safety threshold. When the motor’s following error exceeds an acceptable range, the controller immediately brings the robot arm to a complete stop and reduces system stiffness to a state in which the torque output becomes zero.
According to the experimental results presented in
Figure 14, the external force was detected at
t = 1.3 s and the safety controller began reducing stiffness at
t = 1.6 s. Contact force was detected and controlled within the safety force threshold. At
t = 2.3 s, an alarm was triggered to fully stop movement of the robot arm when the position error became excessive. At that time, the torque output was reduced to zero, and the motor only generated a gravity torque to keep the robot arm in a state of zero gravity to facilitate its movement by an external force. With these experimental results, it is proved that the stiffness control and emergency stop strategy are real-time and safe.
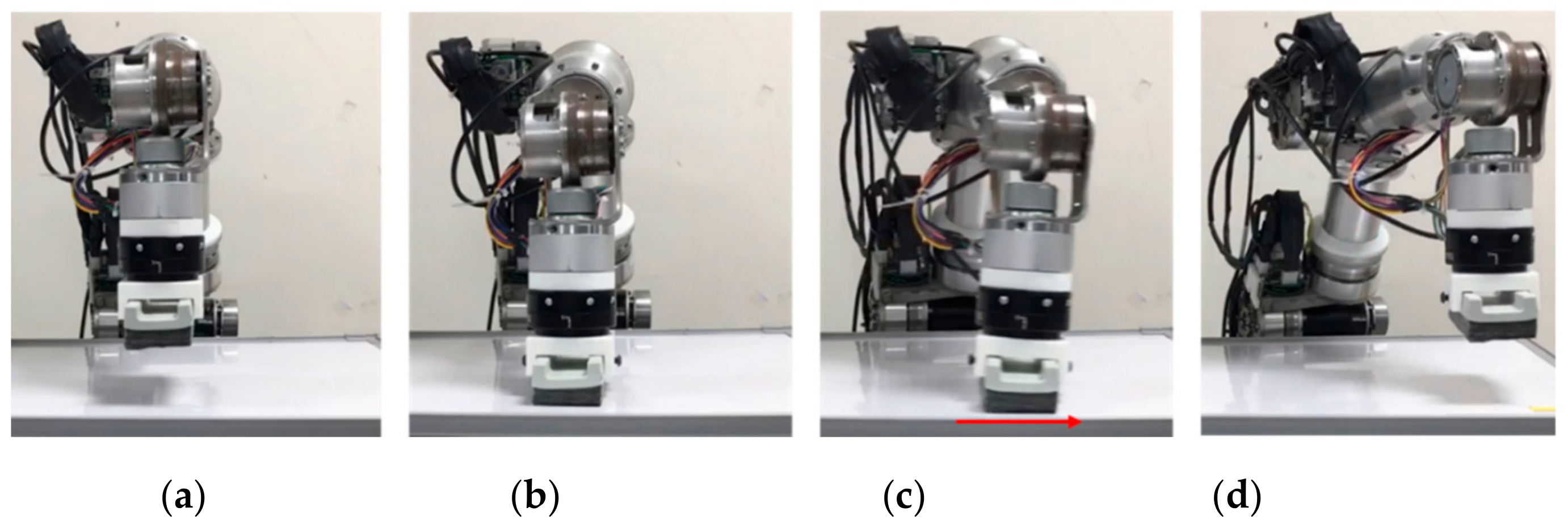
4.4. Force Control Application
The force control experiment tested wiping. In an application that involves wiping a whiteboard, the robot arm needs to bring the tool (eraser) into contact with the working plane (whiteboard) and maintain a contact force for the tool to move along the working surface. Therefore, the controller must be capable of measuring and controlling the contact force in real time. In the experiment, the force control procedure consisted of four phases,
Figure 15a–d, as depicted in
Figure 15. According to the direction of the controlled contact force, the experiment was further divided into two sub-experiments.
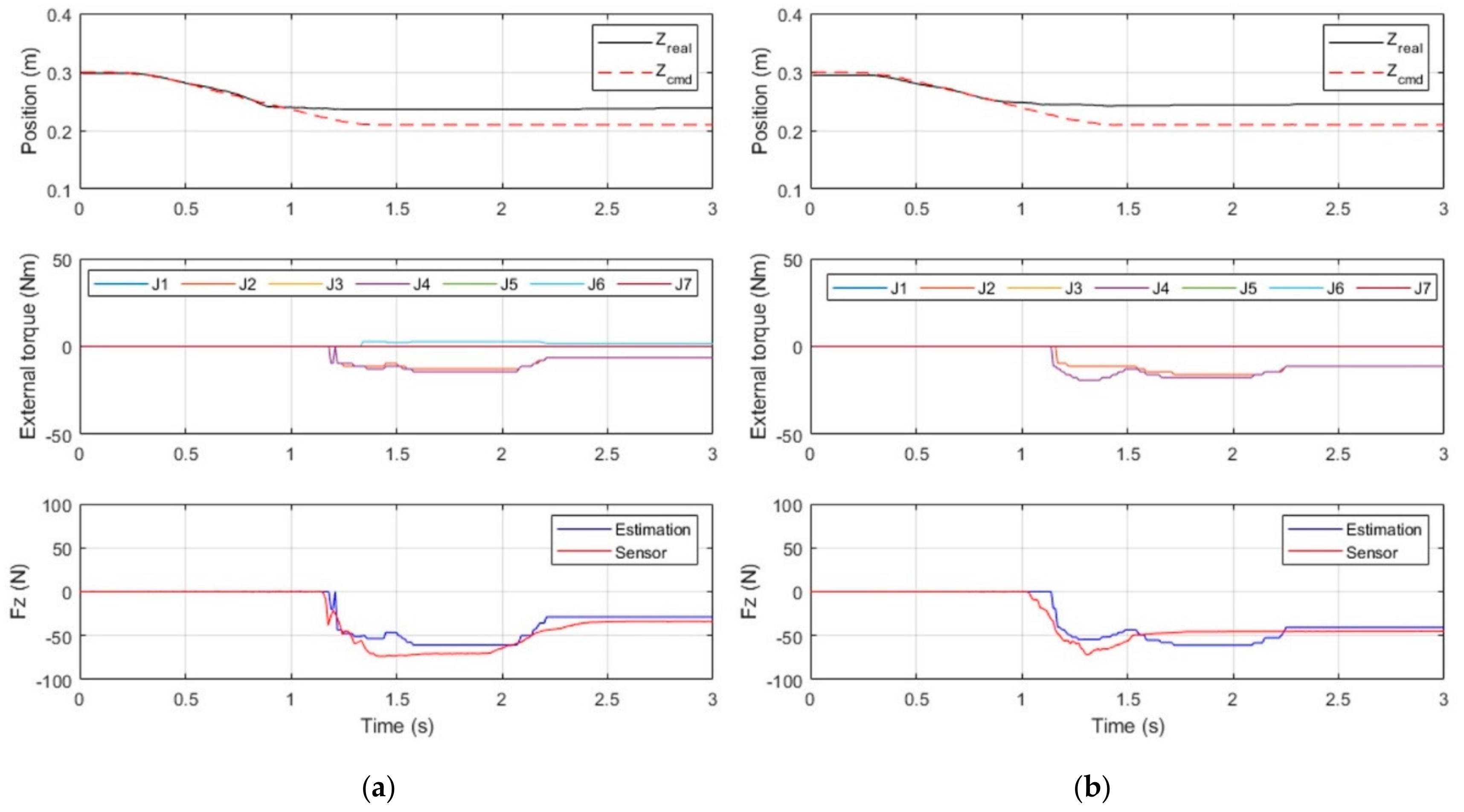
4.5. Experiment 3: Contact Force Control
The experimental phase (b) involved the control of a contact force in a single direction. The amount of contact force was set at 30 N and 50 N, the working plane was at Z = 0.25 m, and the robot arm was given a command to move to Z = 0.21 m, which is lower than the working plane. The resultant position error created a force that was controlled to remain along the Z-axis in (11), and the contact force observer was employed to adjust the system stiffness and generate a contact force on the working plane.
According to the experimental results displayed in
Figure 16, the robot arm came into contact with the working plane at
t =1.2 s, generating a rising contact force; the contact force reached 60 N at
t = 1.4 s, prompting force control to reduce system stiffness and the contact force to the desired level; and the contact force converged to the target level at
t = 2.2 s. During the stiffness control (
t = 1.4 ~ 2.2 s), the force estimation error is larger because the motor torque was being controlled in high-frequency. These results suggest that force control was able to bring a unidirectional contact force to a desired level in approximately 600 ms.
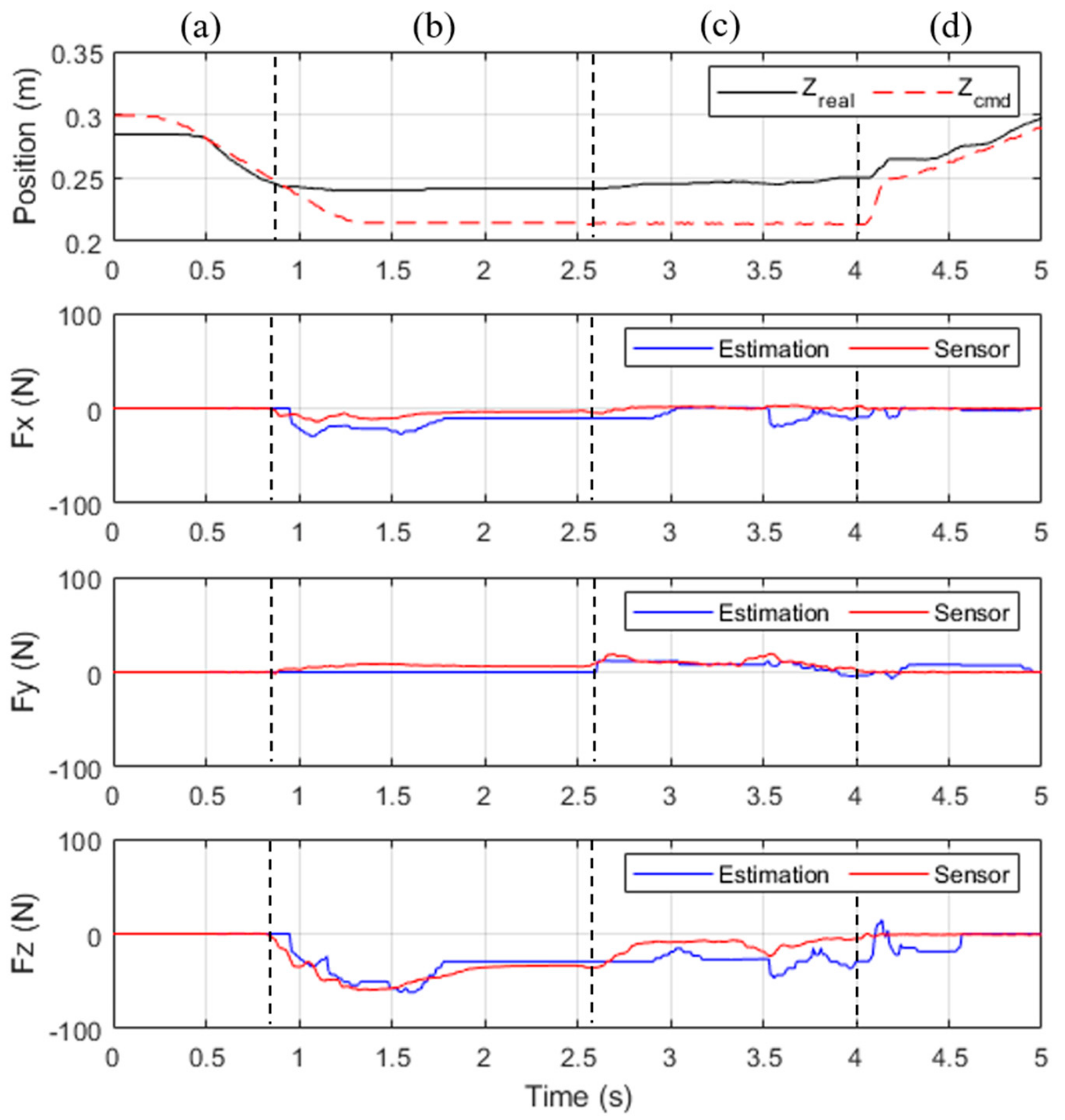
4.6. Experiment 4: Wiping Motion Control
In the wiping motion in the experimental phase (c), the contact force consisted of a downward component (Z-axis) and a component that caused movement (Y-axis). In this experiment, the robot arm came into contact with the working plane and generated a contact force of 30 N, after which it moved toward Y = −0.15 m at a velocity of 100 mm/s. While in motion, the robot arm maintained a contact force of 30 N against the working plane until finally moving upward and leaving the working plane.
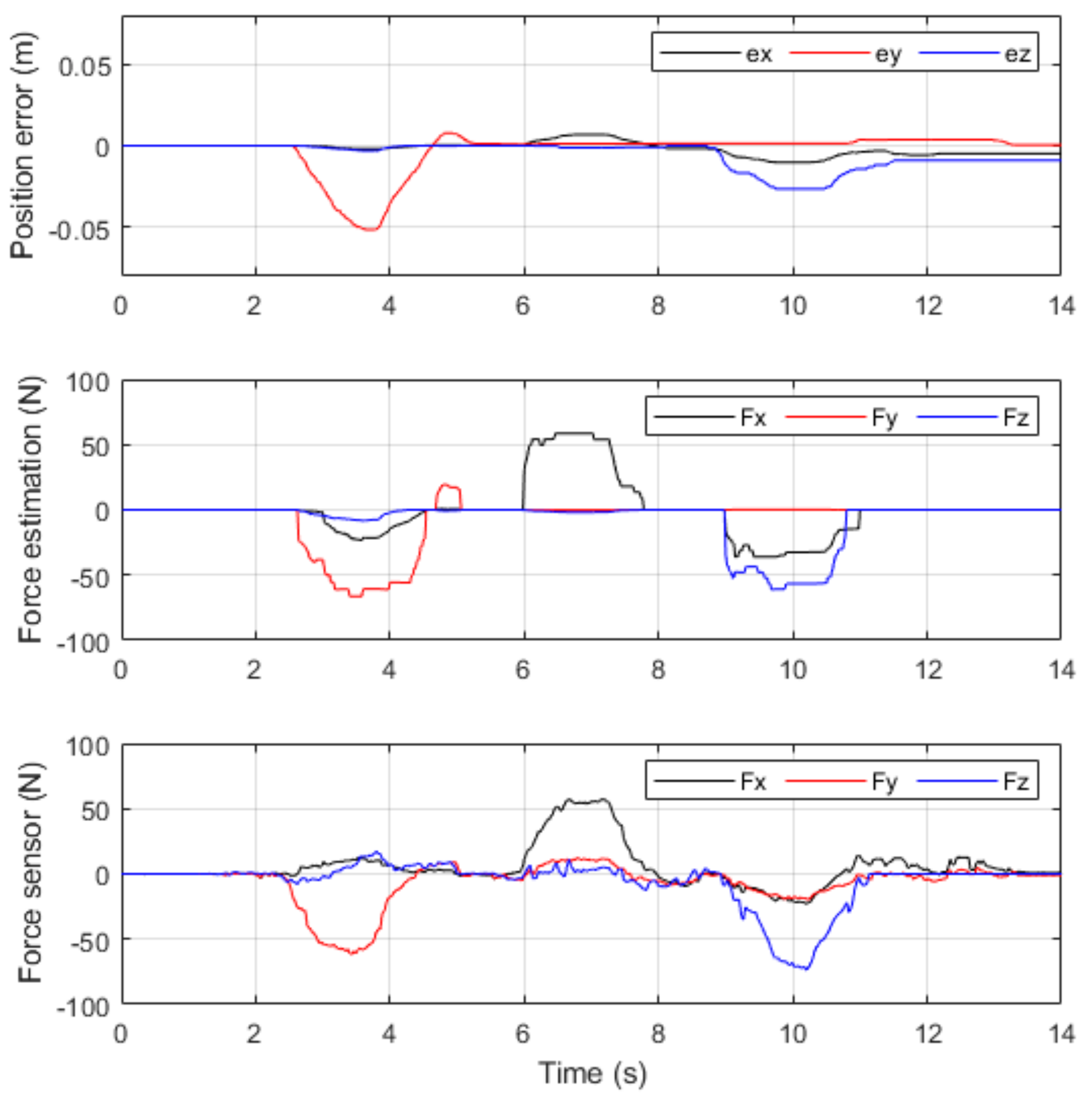
According to the experimental results displayed in
Figure 17, the end-effector came into contact with the working plane at
t = 0.9 s, thus generating a contact force. Moreover, the contact force reached the desired level of 30 N at
t = 1.7 s; the end-effector started moving along the working plane at
t = 2.6 s, and the contact force was maintained at 30 N. At
t = 4.0 s, the robot arm completed its task and moved off of the working plane.
Figure 18 shows the positions that the robot arm was commanded to reach and the actual positions that it reached.
In phase (b) and (c), the desired position error of Z-axis generated a contact force on Z-axis in Equation (11). A delay occurred because the contact force was caused by position errors in the force control. Furthermore, because force control involving multiple axes resulted in greater errors in torque calculation, the actual contact force detected by the contact force observer was approximately 15 N on Z-axis, which is lower than the estimated value. On X-axis and Y-axis, force estimations also have a few errors in dynamic motion, especially in phase (c). The results show that the force estimation observer is not accurate in dynamic motion because motors are in high-frequency current control. This accuracy problem of dynamic force estimation can be solved by improving dynamic torque compensation on the high-accuracy dynamic model.
In these experiments, a commercial high-precision force sensor was employed to record the contact force on the end-effector in the collision detection, external force detection, and contact force control sub-experiments. The results proved that the contact force observer and force control could effectively be applied in stiffness control, thereby restricting the output of the robot arm and the contact force as soon as collision occurred. The contact force observer exhibited more precise force control in a static state, with a mean error of approximately 10% or less. However, it exhibited greater error in the multiple-axis force control in a dynamic state. This can be an area for future improvement.
5. Conclusions
This study applied a low-cost rigid robot arm system designed for service applications to a situation in which few low-resolution sensors were available and proposed a design that combines a contact force observer and a safety force controller. The design relied on the data from the low-resolution position and current sensors to control torques by an open-loop dynamic compensator, which enabled the system to perform real-time estimation of external torques, as well as estimate the contact force on the end-effector with the system model without needing to employ additional force sensors. Regarding safety control, the design introduced a torque saturation limiter to the servo controller for altering joint torque output on the basis of real-time measurements of contact force; the design also enables adjustment of the robot arm’s system stiffness by altering joint torque output, thus realizing joint impedance control and improving the safety of human–machine interactions. This approach has the advantage of not involving an excessive number of parameters in the adjustment of joint torque output. It also effectively reduces the burden of the processor by not requiring complicated inverse kinematic calculations. Overall, this study successfully developed a low-cost safety controller that is capable of detecting a contact force in real time and changing the stiffness and force output of a robot arm according to its application, thereby improving its safety when used in human–machine interactions. In the future, this approach can be applied to low-cost collaborative robots for use in-home or stores in service applications, and can provide contact force detection and safety position and force control without extra sensors and mechanisms.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}