A Forward Collision Warning System for Smartphones Using Image Processing and V2V Communication

 , ,
, ,  ,
,  , ,
, ,  and
and
Abstract
1. Introduction
2. Application Features
3. Functional Details of the Application
3.1. Vehicles Broadcast Message
3.2. Plate Recognition
- Detect regions of interest: The first step, which is also the most processing-intensive step, involves the detection of regions of interest where potential license plates might exist. The common face detection algorithm called Local Binary Patterns (LBP) [23] is used for this purpose. An image may contain one or more regions of interest, each of which goes though the next phases.
- Character analysis: Once converted to black and white, character analysis algorithms take over trying to find character-sized regions in ascending order of sizes, by starting to look for smaller ones first. Regions with connected blobs that are roughly similar to license plate characters and equal vertical alignment are marked for processing.
- Edge detection: Hough transformation [26] is employed to detect all four edges of the plates since they are linear in nature. This step also takes into account information like character height from the previous phase and the ratio of actual plate width and height depending on the geographical region to make a best guess of the precise position of the plate in the image.
- De-skewing:Now, any rotation or skew that might exist is corrected by remapping the plate region.
- Segmentation of characters: This phase is related to cleaning of the plate region by removing speckles and edges so that they are not mistaken for characters like the letter “l” or the number“1”. Furthermore, all characters are separated, and the vertical histogram is used to detect gaps in characters.
- OCR: This involves analysis of individual characters and the computation of confidence.
- Result generation: In the last part of the sequence, the best possible character combination is searched in the context of the known plate pattern that corresponds to the different regions of the world.
3.3. Selection of the Relevant Plate
3.4. Distance Calculation
3.5. Alert User and the Car Ahead
4. The Vehicular Network
5. Results
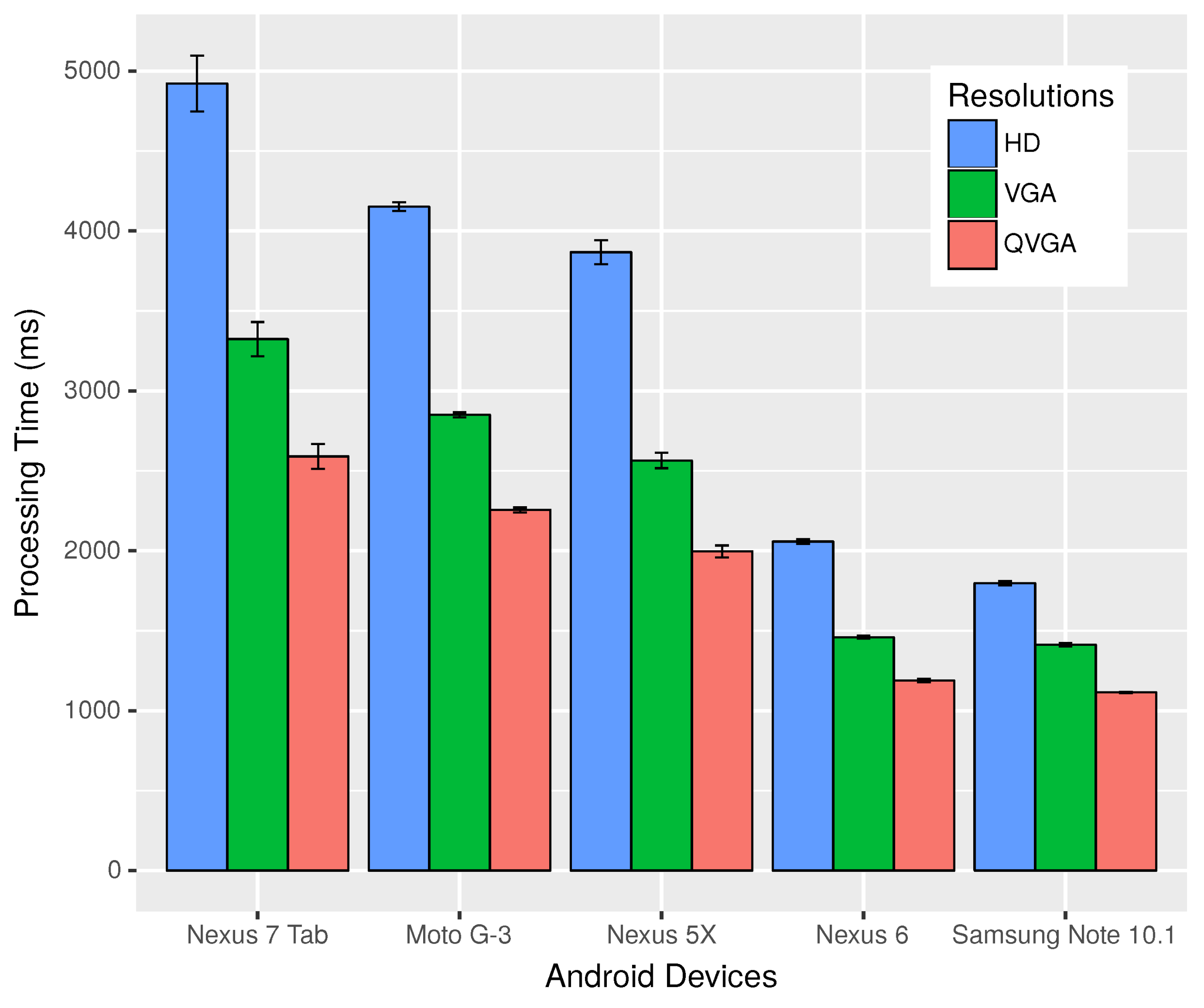
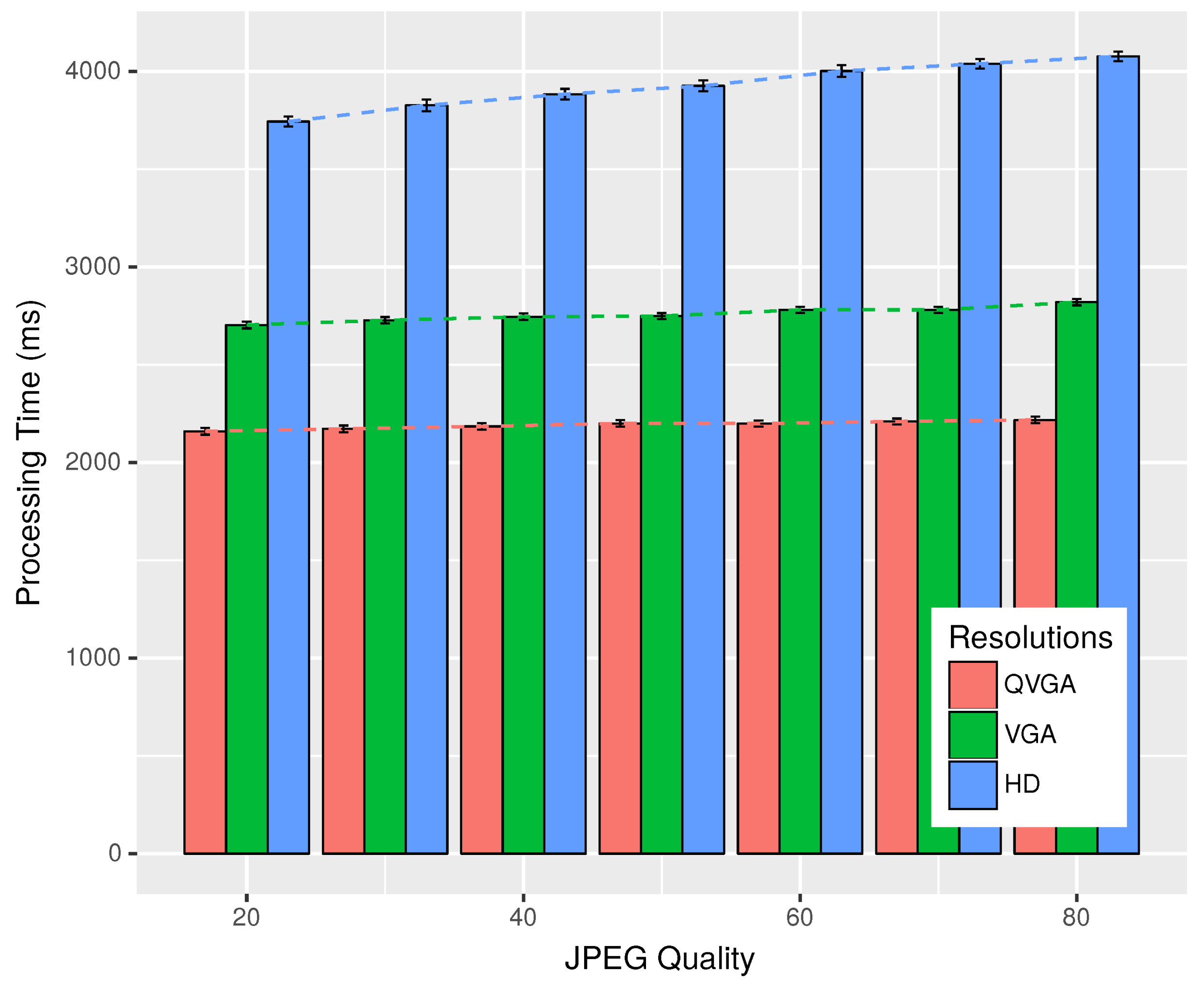
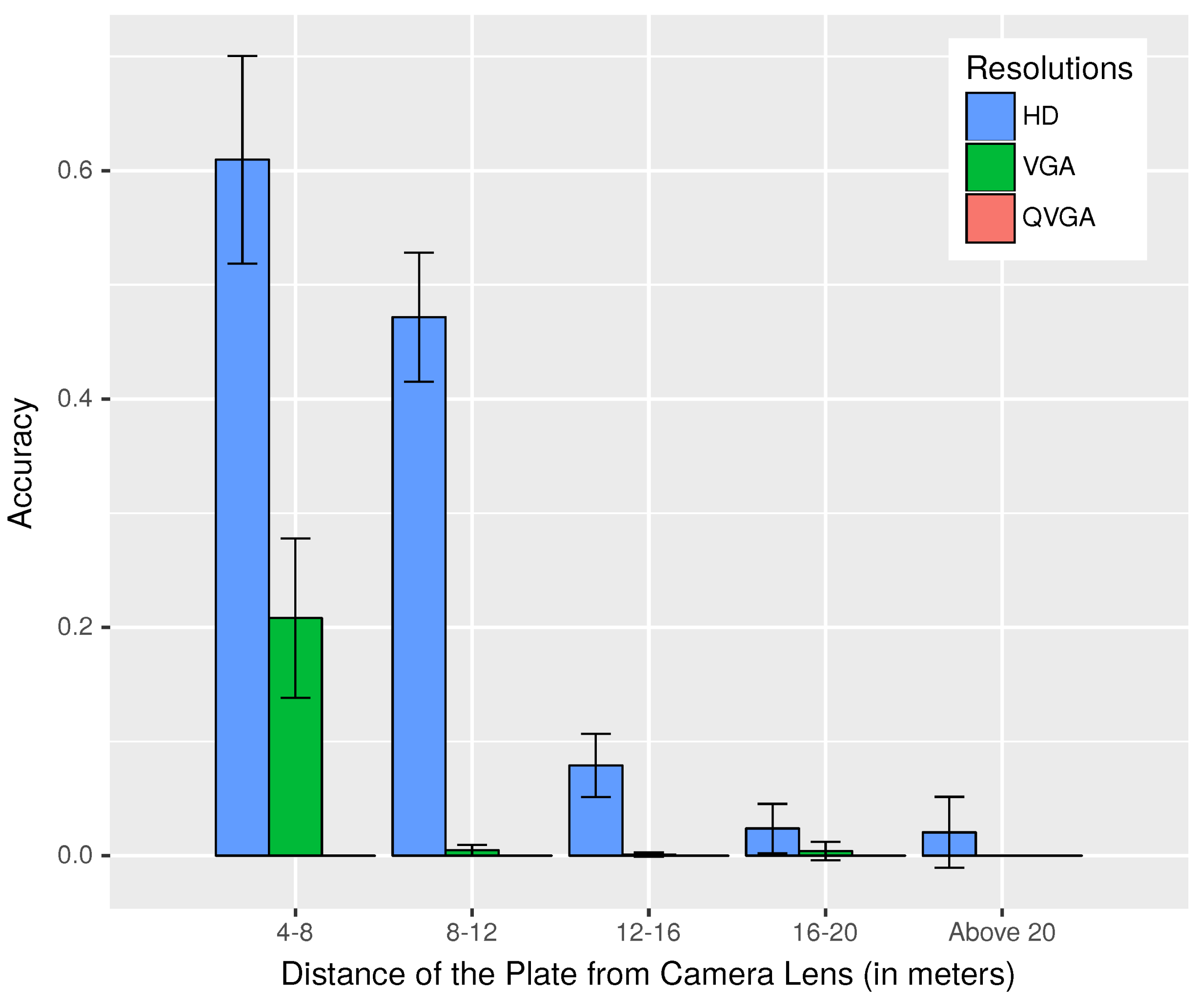
5.1. Static Experiments
5.2. Dynamic Experiments
6. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| FCW | Forward Collision Warning |
| GPS | Global Positioning System |
| HD | High Definition |
| IEEE | Institute of Electrical and Electronics Engineers |
| IP | Internet Protocol |
| ITS | Intelligent Transportation System |
| JPEG | Joint Photographic Experts Group |
| LBP | Local Binary Patterns |
| LiDAR | Light Detection and Ranging |
| OCR | Optical Character Recognition |
| OS | Operating System |
| QVGA | Quarter Video Graphics Array |
| RAM | Random Access Memory |
| RSA | Road Safety Authority |
| V2V | Vehicle to Vehicle |
| VGA | Video Graphics Array |
| VNs | Vehicular Networks |
| WAVE | Wireless Access in Vehicular Environments |
References
- Jiang, D.; Delgrossi, L. IEEE 802.11 p: Towards an international standard for wireless access in vehicular environments. In Proceedings of the Vehicular Technology Conference, Singapore, 11–14 May 2008; pp. 2036–2040. [Google Scholar]
- Woll, J.D. VORAD collision warning radar. In Proceedings of the Proceedings International Radar Conference, Alexandria, VA, USA, 8–11 May 1995; pp. 369–372. [Google Scholar]
- General Motors Official Website. Available online: https://www.gm.com/ (accessed on 6 June 2018).
- Chen, S.K.; Parikh, J.S. Developing a forward collision warning system simulation. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No.00TH8511), Dearborn, MI, USA, 5 October 2000; pp. 338–343. [Google Scholar]
- Miller, R.; Huang, Q. An adaptive peer-to-peer collision warning system. In Proceedings of the Vehicular Technology Conference, Birmingham, AL, USA, 6–9 May 2002; pp. 317–321. [Google Scholar]
- Srinivasa, N. Vision-based vehicle detection and tracking method for forward collision warning in automobiles. In Proceedings of the Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; pp. 626–631. [Google Scholar]
- Srinivasa, N.; Chen, Y.; Daniell, C. A fusion system for real-time forward collision warning in automobiles. In Proceedings of the Intelligent Transportation Systems, Shanghai, China, 12–15 Octomber 2003; pp. 457–462. [Google Scholar]
- Dagan, E.; Mano, O.; Stein, G.P.; Shashua, A. Forward collision warning with a single camera. In Proceedings of the Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 37–42. [Google Scholar]
- Zhang, Y.; Kiselewich, S.J.; Bauson, W.A. Legendre and Gabor moments for vehicle recognition in forward collision warning. In Proceedings of the Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 1185–1190. [Google Scholar]
- Lin, H.Y.; Chen, L.Q.; Lin, Y.H.; Yu, M.S. Lane departure and front collision warning using a single camera. In Proceedings of the Intelligent Signal Processing and Communications Systems (ISPACS), Taipei, Taiwan, 4–7 November 2012; pp. 64–69. [Google Scholar]
- Coelingh, E.; Jakobsson, L.; Lind, H.; Lindman, M. Collision Warning with Auto Brake: A Real-Life Safety Perspective. Available online: https://www.researchgate.net/publication/242687640_COLLISION_WARNING_WITH_AUTO_BRAKE_-_A_REAL-LIFE_SAFETY_PERSPECTIVE (accessed on 11 August 2018).
- Coelingh, E.; Eidehall, A.; Bengtsson, M. Collision warning with full auto brake and pedestrian detection—A practical example of automatic emergency braking. In Proceedings of the Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 155–160. [Google Scholar]
- Volvo Official Website. Available online: https://www.volvocars.com/ (accessed on 6 June 2018).
- Vincent, O.R.; Folorunso, O. A descriptive algorithm for sobel image edge detection. In Proceedings of the Informing Science & IT Education Conference (InSITE), Macon, GA, USA, 12–15 June 2009; pp. 97–107. [Google Scholar]
- Liu, J.F.; Su, Y.F.; Ko, M.K.; Yu, P.N. Development of a vision-based driver assistance system with lane departure warning and forward collision warning functions. In Proceedings of the Computing: Techniques and Applications, Canberra, Australia, 1–3 December 2008; pp. 480–485. [Google Scholar]
- Chang, B.R.; Tsai, H.F.; Young, C.P. Intelligent data fusion system for predicting vehicle collision warning using vision/GPS sensing. Expert Syst. Appl. 2010, 37, 2439–2450. [Google Scholar] [CrossRef]
- Misener, J.A.; Sengupta, R.; Krishnan, H. Cooperative collision warning: Enabling crash avoidance with wireless technology. In Proceedings of the 12th World Congress on ITS, San Francisco, CA, USA, 6–11 October 2005. [Google Scholar]
- Tan, H.S.; Huang, J. DGPS-based vehicle-to-vehicle cooperative collision warning: Engineering feasibility viewpoints. IEEE Trans. Intell. Trans. Syst. 2006, 7, 415–428. [Google Scholar] [CrossRef]
- Lei, Z.; Wang, J.Q.; Li, K.Q. Forward collision warning system based on thasv-ii platform. In Proceedings of the Vehicular Electronics and Safety, Shanghai, China, 13–15 December 2006; pp. 255–258. [Google Scholar]
- Chun, J.; Han, S.H.; Park, G.; Seo, J.; Lee, I.; Choi, S. Evaluation of vibrotactile feedback for forward collision warning on the steering wheel and seatbelt. Int. J. Ind. Ergonom. 2012, 42, 443–448. [Google Scholar] [CrossRef]
- OpenALPR Official Website. Available online: https://www.openalpr.com/ (accessed on 7 June 2018).
- Tornell, S.M.; Patra, S.; Calafate, C.T.; Cano, J.C.; Manzoni, P. GRCBox: Extending Smartphone Connectivity in Vehicular Networks. Int. J. Distrib. Sens. N. 2015, 2015, 1–13. [Google Scholar] [CrossRef]
- Ahonen, T.; Hadid, A.; Pietikainen, M. Face description with local binary patterns: Application to face recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 2037–2041. [Google Scholar] [CrossRef] [PubMed]
- Wolf, C.; Jolion, J.M.; Chassaing, F. Text localization, enhancement and binarization in multimedia documents. In Proceedings of the Object Recognition Supported by User Interaction for Service Robots, Quebec, QC, Canada, 11–15 August 2002. [Google Scholar]
- Sauvola, J.; Pietikäinen, M. Adaptive document image binarization. Pattern Recogn. 2000, 33, 225–236. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commu. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Road Safety Authority of Ireland Suggest the Use of Two Second Rule. Available online: http://www.rotr.ie/Rules_of_the_road.pdf (accessed on 7 June 2018).
- New York State Department of Motor Vehicles. Available online: https://dmv.ny.gov/about-dmv/chapter-8-defensive-driving (accessed on 8 June 2018).
- Raspberry Pi Official Website. Available online: https://www.raspberrypi.org/ (accessed on 20 April 2018).
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter 1995. Available online: https://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf (accessed on 11 August 2018).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Distance (m) | Calculated Distance (m) |
|---|---|
| 3 | 3.0 |
| 5 | 4.9 |
| 8 | 7.8 |
| 10 | 9.7 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patra, S.; Veelaert, P.; Calafate, C.T.; Cano, J.-C.; Zamora, W.; Manzoni, P.; González, F. A Forward Collision Warning System for Smartphones Using Image Processing and V2V Communication. Sensors 2018, 18, 2672. https://doi.org/10.3390/s18082672
Patra S, Veelaert P, Calafate CT, Cano J-C, Zamora W, Manzoni P, González F. A Forward Collision Warning System for Smartphones Using Image Processing and V2V Communication. Sensors. 2018; 18(8):2672. https://doi.org/10.3390/s18082672
Chicago/Turabian StylePatra, Subhadeep, Peter Veelaert, Carlos T. Calafate, Juan-Carlos Cano, Willian Zamora, Pietro Manzoni, and Fabio González. 2018. "A Forward Collision Warning System for Smartphones Using Image Processing and V2V Communication" Sensors 18, no. 8: 2672. https://doi.org/10.3390/s18082672
APA StylePatra, S., Veelaert, P., Calafate, C. T., Cano, J.-C., Zamora, W., Manzoni, P., & González, F. (2018). A Forward Collision Warning System for Smartphones Using Image Processing and V2V Communication. Sensors, 18(8), 2672. https://doi.org/10.3390/s18082672