Comparative Analysis of Warp Function for Digital Image Correlation-Based Accurate Single-Shot 3D Shape Measurement


Abstract
:1. Introduction
2. Principle of DIC-Based Single-Shot 3D Shape Measurement
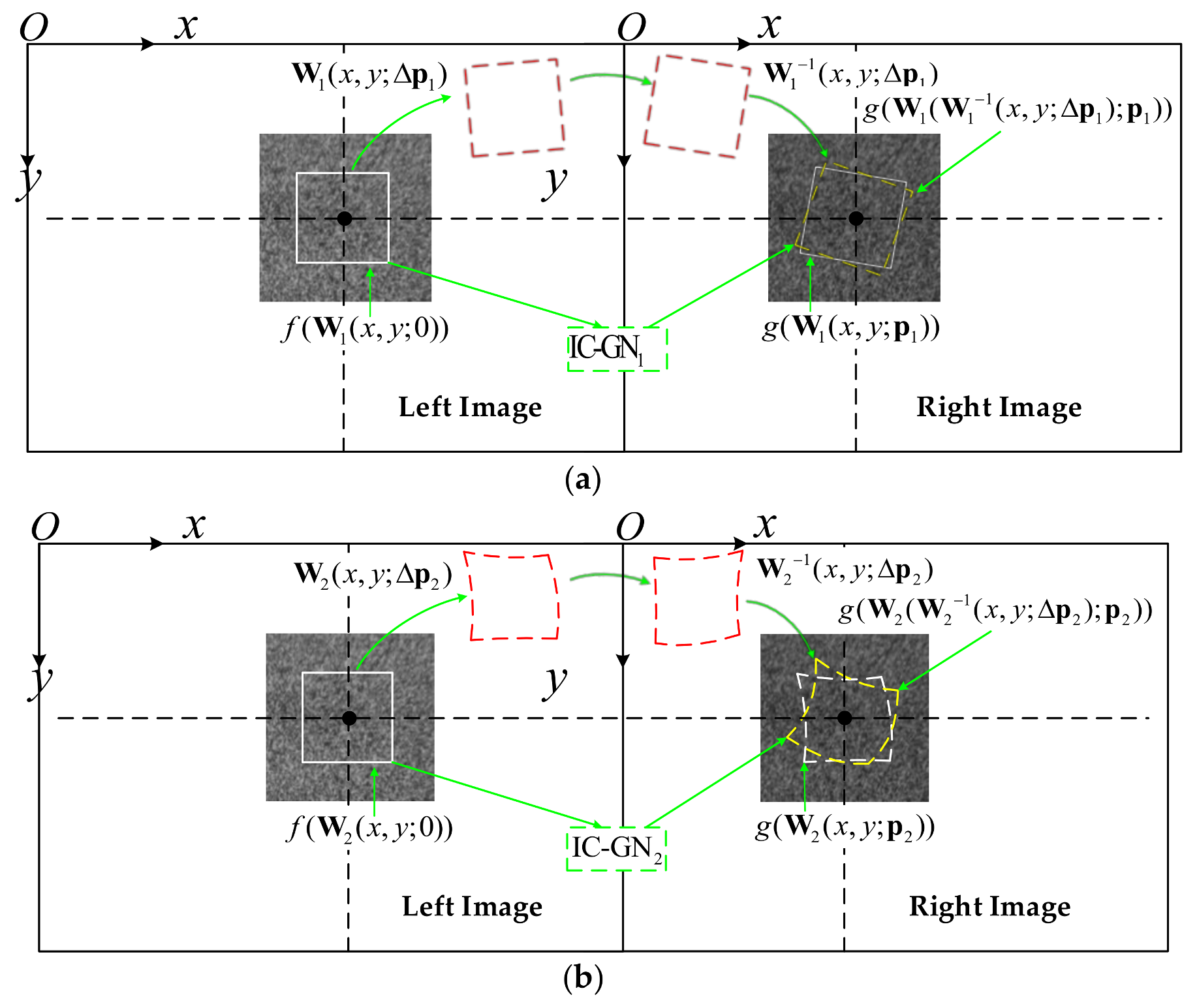
2.1. Warp Function of DIC
2.2. Principle of DIC-Based Stereo Matching Using IC-GN Algorithm
3. Experiments and Discussions
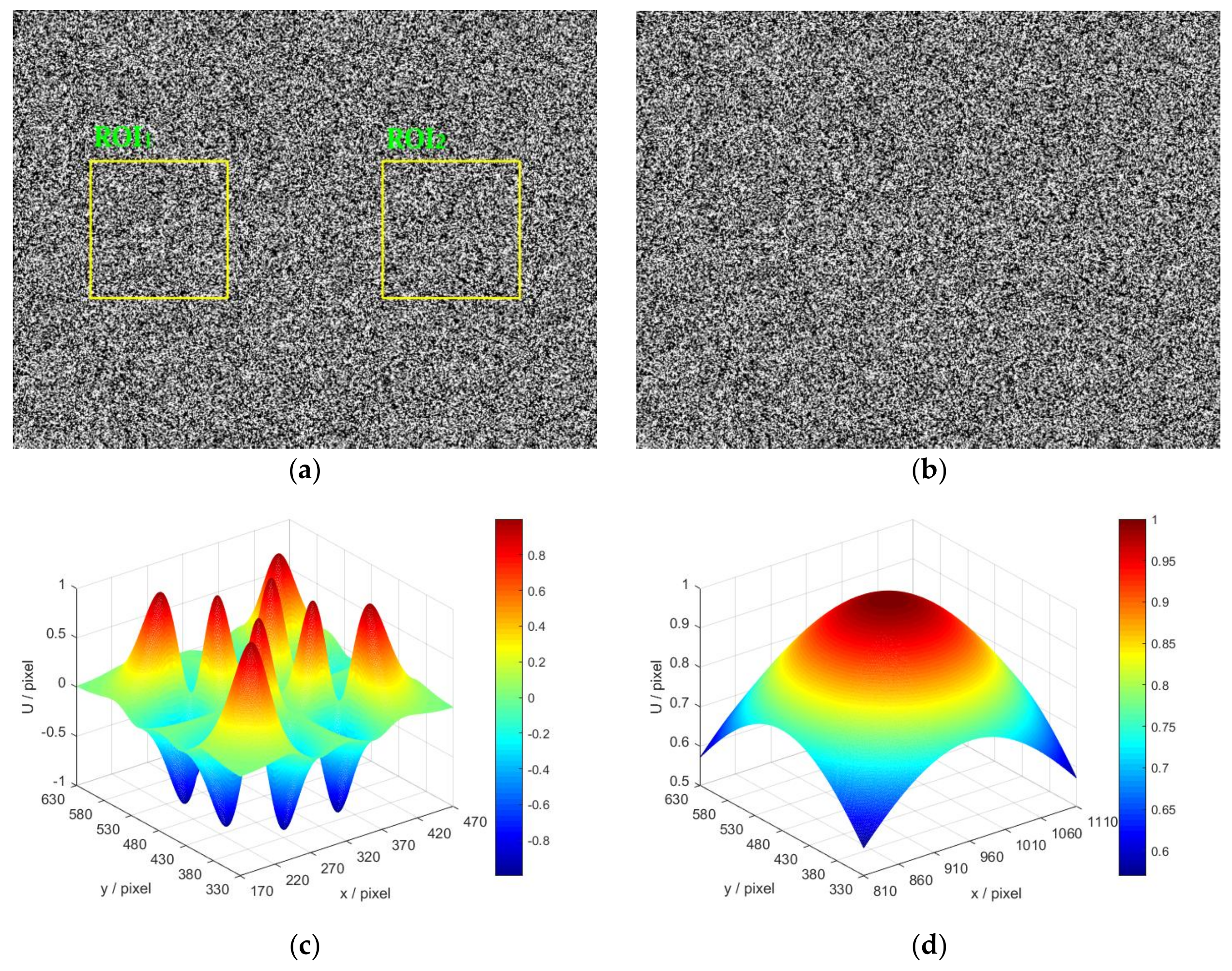
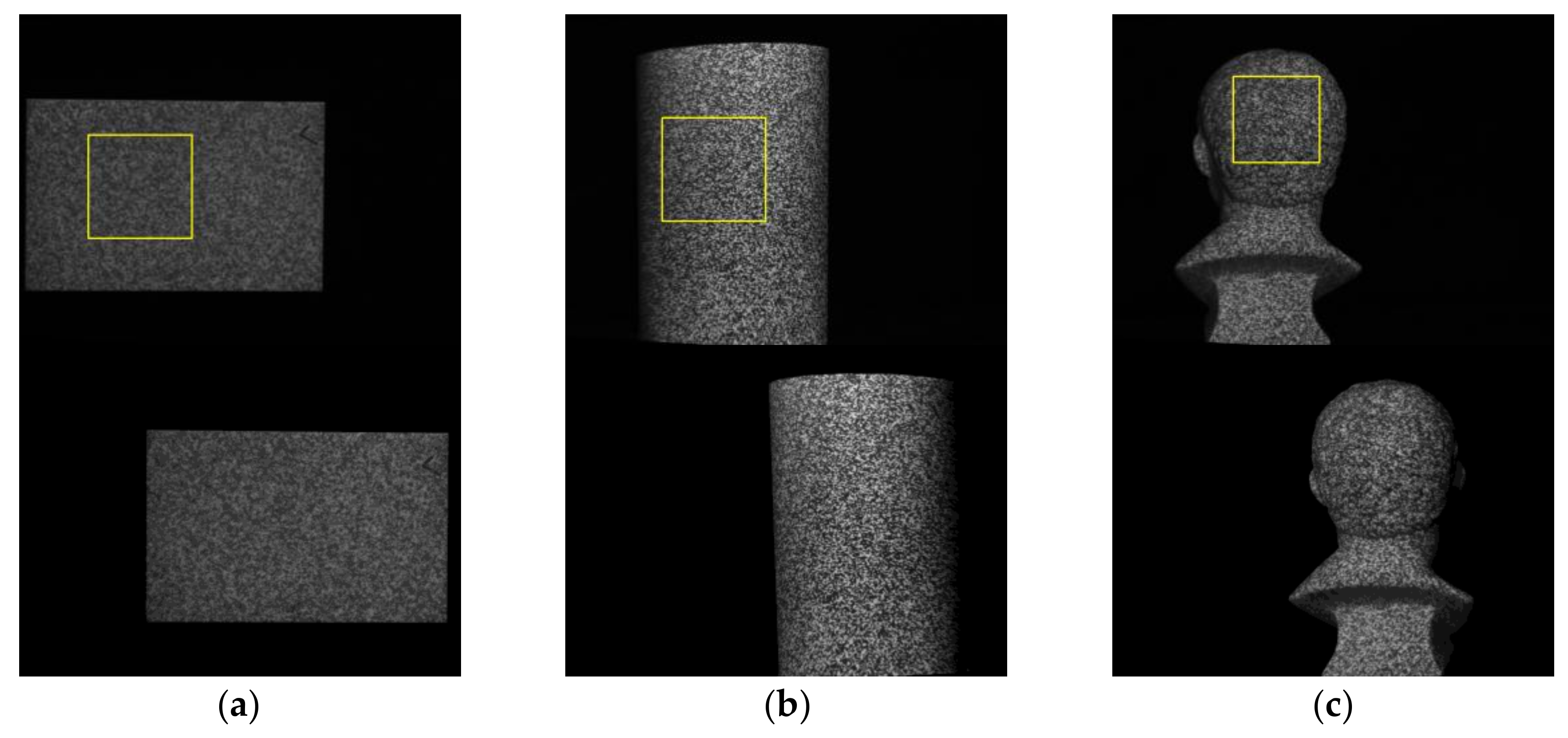
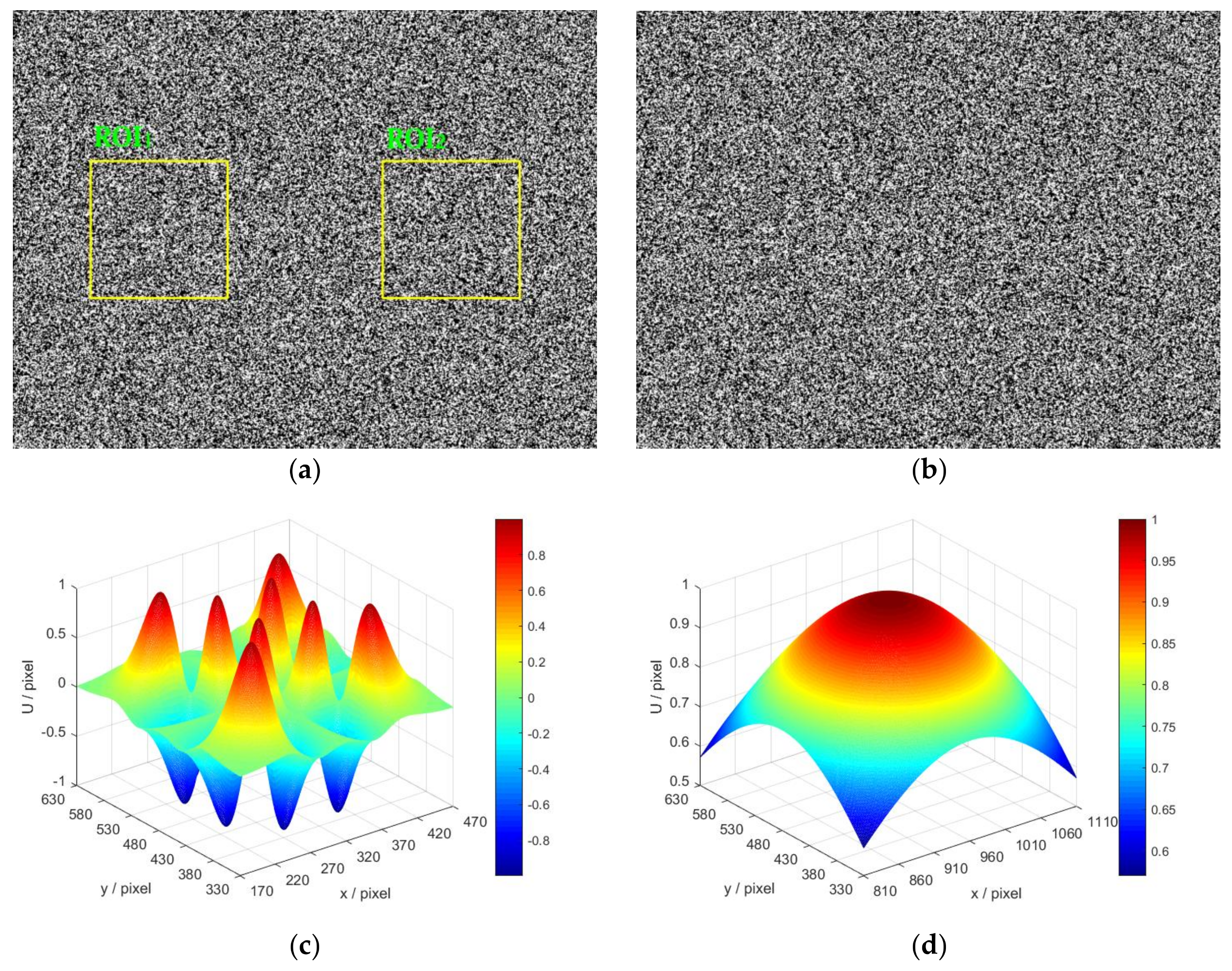
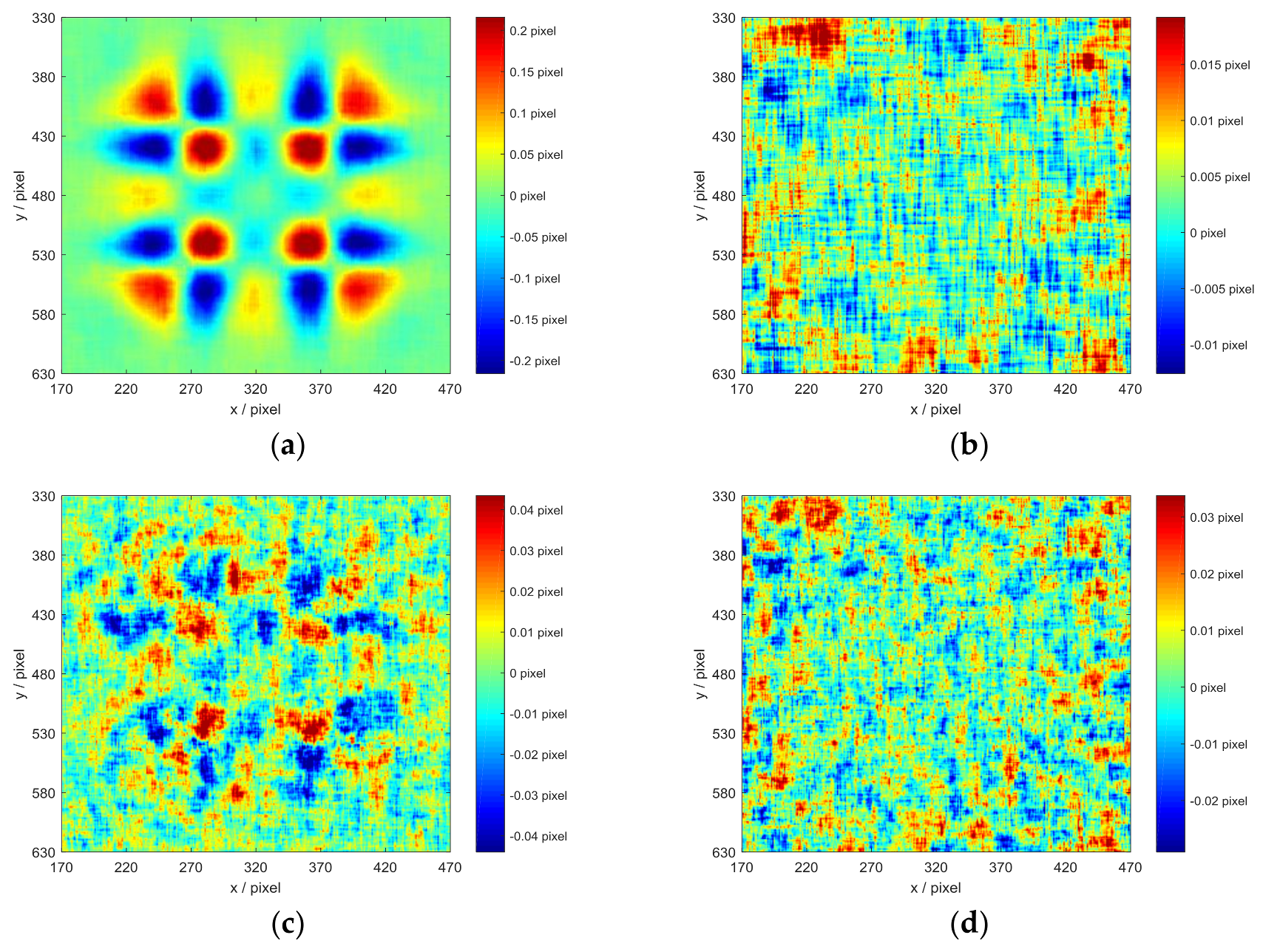
3.1. Comparative Analysis by Numerical Simulations
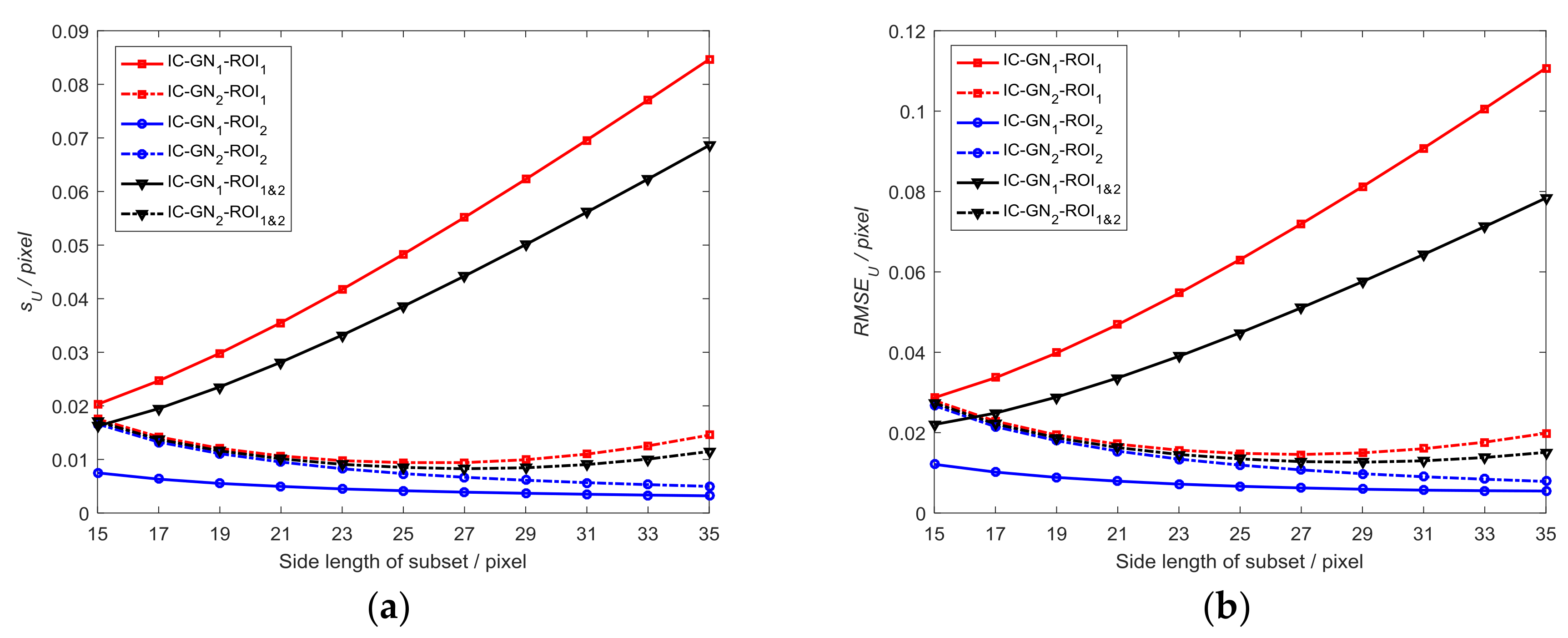
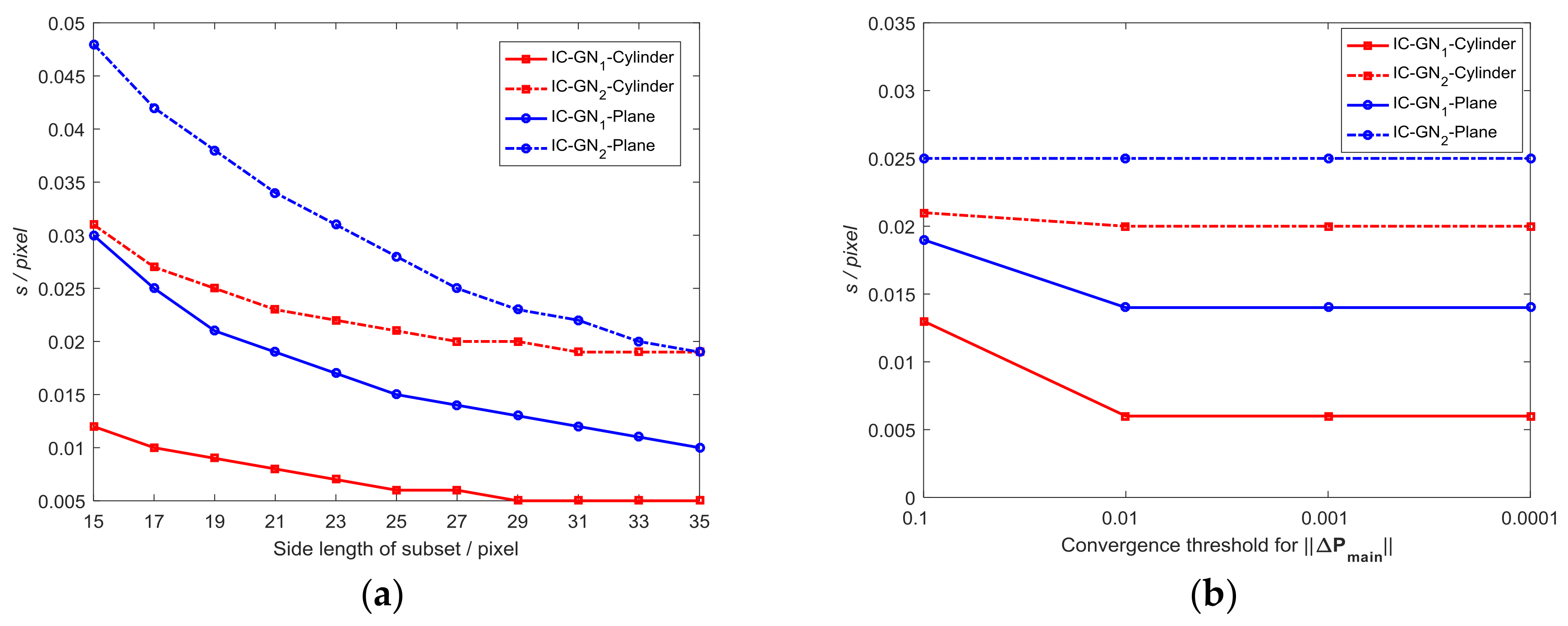
3.1.1. Comparative Analysis with Different Subset Sizes
3.1.2. Comparative Analysis with Different Convergence Criteria
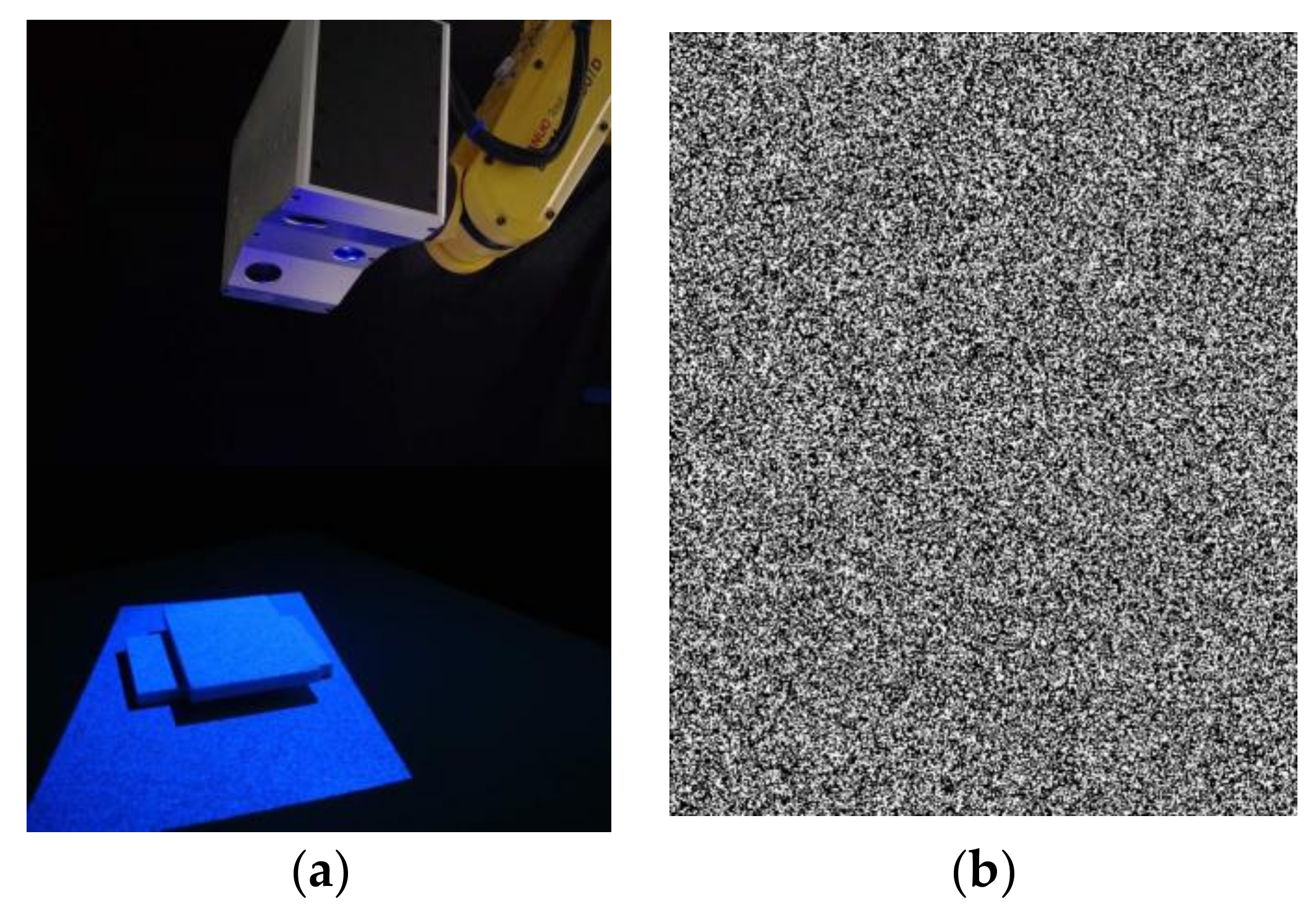
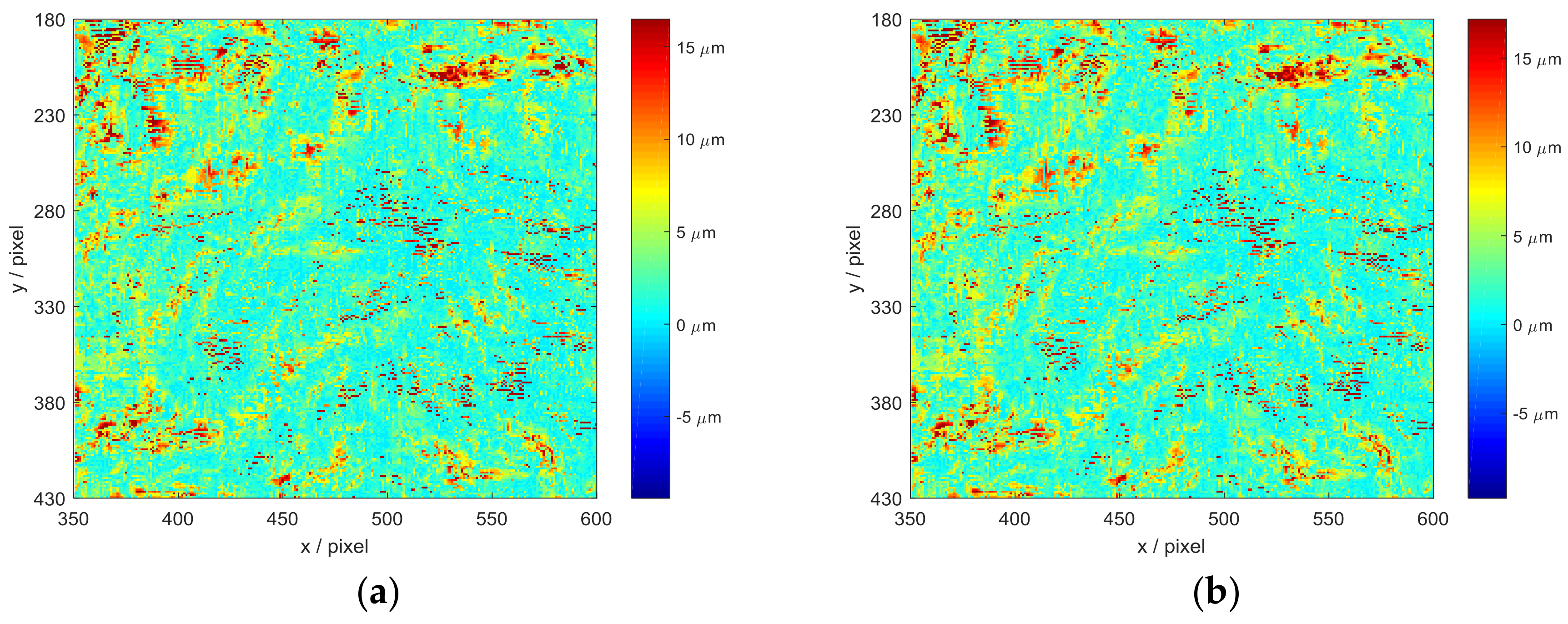
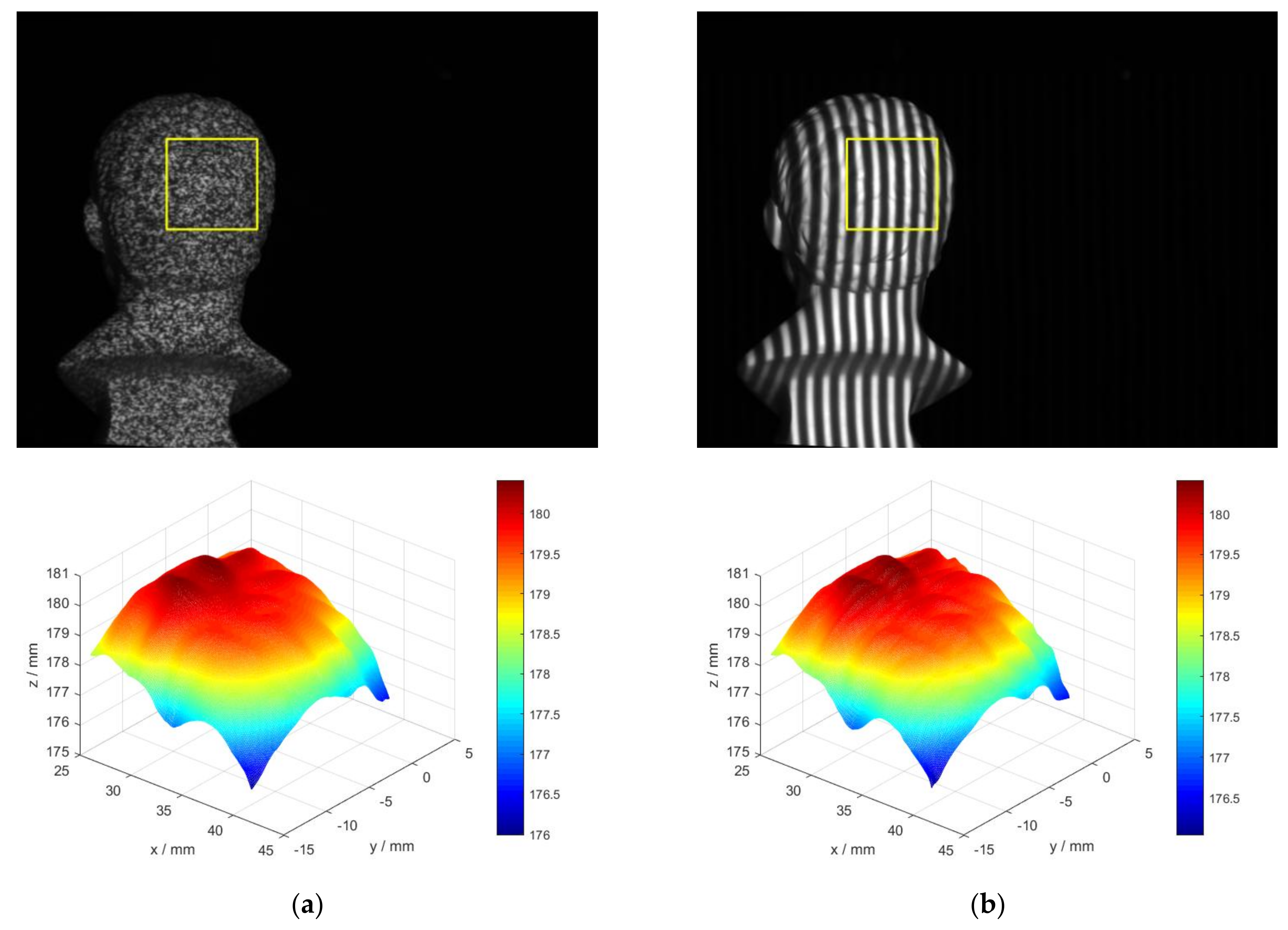
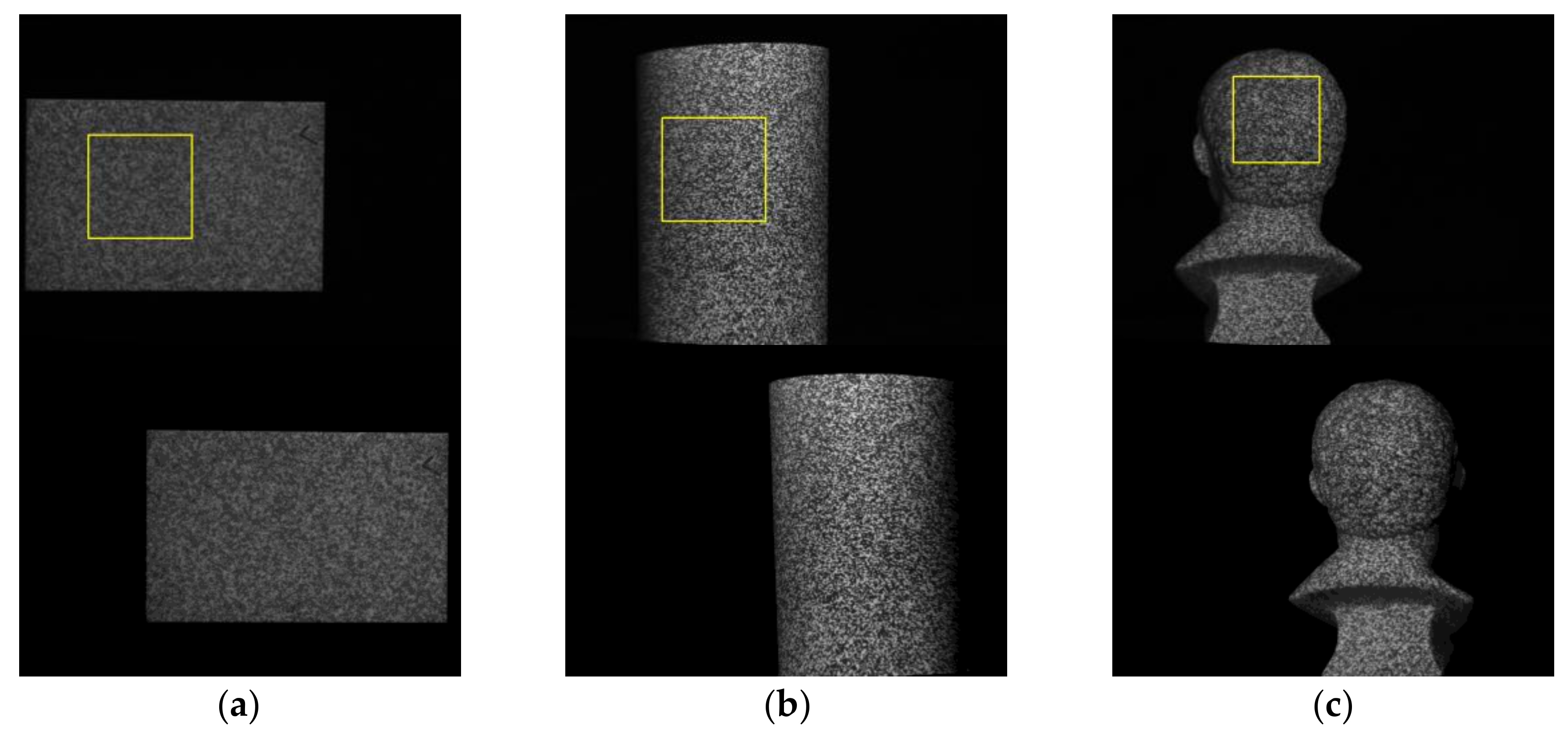
3.2. Comparative Anslysis by Real Tests
4. Conclusions
- (1)
- The first-order warp function is more suitable for surfaces with a shape of flat or small curvature, such as plane, cylinder, and flat Gaussian surface, etc. Under the same convergence criteria, IC-GN1 is always more efficient and accurate than IC-GN2 with all tested subset sizes.
- (2)
- The second-order warp function is more suitable for surfaces with a complex shape or large curvature, such as the tested back surface of head and analogous sinusoidal-Gaussian surface, etc. IC-GN1 is not capable or accurate enough for such kind of 3D shape measurement; the matching rate of tested ROI of head is under 70% with any of the tested subset size.
- (3)
- The convergence thresholds for IC-GN1 and IC-GN2 are recommended to be that the variation of the modulus of incremental displacement vector is less than 0.01 pixel, and 0.1 pixel, respectively. Both the recommended convergence thresholds can achieve considerable measurement precision compared to smaller thresholds according to the simulation tests and real experiments.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chi, S.; Xie, Z.; Chen, W. A laser line auto-scanning system for underwater 3D reconstruction. Sensors 2016, 16, 1534. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Chen, X.; Xi, J. Modeling and calibration of a novel one-mirror galvanometric laser scanner. Sensors 2017, 17, 164. [Google Scholar] [CrossRef] [PubMed]
- Jung, J.; Yoon, S.; Ju, S.; Heo, J. Development of kinematic 3D laser scanning system for indoor mapping and as-built bim using constrained slam. Sensors 2015, 15, 26430–26456. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Xi, J.T.; Jiang, T.; Jin, Y. Research and development of an accurate 3D shape measurement system based on fringe projection: Model analysis and performance evaluation. Precis. Eng. 2008, 32, 215–221. [Google Scholar]
- Nguyen, T.T.; Slaughter, D.C.; Max, N.; Maloof, J.N.; Sinha, N. Structured light-based 3D reconstruction system for plants. Sensors 2015, 15, 18587–18612. [Google Scholar] [CrossRef] [PubMed]
- Kieu, H.; Pan, T.; Wang, Z.; Le, M.; Nguyen, H.; Vo, M. Accurate 3D shape measurement of multiple separate objects with stereo vision. Meas. Sci. Technol. 2014, 25, 1–7. [Google Scholar] [CrossRef]
- Yang, X.; Chen, X.; Xi, J. Efficient background segmentation and seed point generation for a single-shot stereo system. Sensors 2017, 17, 2782. [Google Scholar] [CrossRef] [PubMed]
- Yan, T.H.; Yong, S.; Zhang, Q.C. Precise 3D shape measurement of three-dimensional digital image correlation for complex surfaces. Sci. China Technol. Sci. 2017, 61, 68–73. [Google Scholar] [CrossRef]
- Nguyen, H.; Wang, Z.; Quisberth, J. Accuracy Comparison of Fringe Projection Technique and 3D Digital Image Correlation Technique. In Advancement of Optical Methods in Experimental Mechanics; Springer: Cham, Switzerland, 2016; pp. 195–201. [Google Scholar]
- Zhang, Z.H. Review of single-shot 3D shape measurement by phase calculation-based fringe projection techniques. Opt. Las. Eng. 2012, 50, 1097–1106. [Google Scholar] [CrossRef]
- Xie, H. Full-field strain measurement using a two-dimensional savitzky-golay digital differentiator in digital image correlation. Opt. Eng. 2007, 46, 033601. [Google Scholar]
- Huang, J.; Pan, X.; Peng, X.; Yuan, Y.; Xiong, C.; Fang, J.; Yuan, F. Digital image correlation with self-adaptive gaussian windows. Exp. Mech. 2013, 53, 505–512. [Google Scholar] [CrossRef]
- Lu, H.; Cary, P.D. Deformation measurements by digital image correlation: Implementation of a second-order displacement gradient. Exp. Mech. 2000, 40, 393–400. [Google Scholar] [CrossRef]
- Pan, B. Reliability-guided digital image correlation for image deformation measurement. Appl. Opt. 2009, 48, 1535–1542. [Google Scholar] [CrossRef] [PubMed]
- Baker, S.; Dellaert, F.; Matthews, I. Aligning Images Incrementally Backwards. 2001. Available online: http://pdfs.semanticscholar.org/11e4/f603e2cacf4533a919ba3fbdf79939423c74.pdf (accessed on 2 February 2018).
- Baker, S.; Matthews, I. Lucas-kanade 20 years on: A unifying framework. Int. J. Comput. Vis. 2004, 56, 221–255. [Google Scholar] [CrossRef]
- Pan, B.; Li, K.; Tong, W. Fast, robust and accurate digital image correlation calculation without redundant computations. Exp. Mech. 2013, 53, 1277–1289. [Google Scholar] [CrossRef]
- Dai, X.; He, X.; Shao, X.; Chen, Z. Real-time 3D digital image correlation method and its application in human pulse monitoring. Appl. Opt. 2016, 55, 696. [Google Scholar]
- Wu, R.; Kong, C.; Li, K.; Zhang, D. Real-time digital image correlation for dynamic strain measurement. Exp. Mech. 2016, 56, 1–11. [Google Scholar] [CrossRef]
- Gao, Y.; Cheng, T.; Su, Y.; Xu, X.; Zhang, Y.; Zhang, Q. High-efficiency and high-accuracy digital image correlation for three-dimensional measurement. Opt. Lasers Eng. 2015, 65, 73–80. [Google Scholar] [CrossRef]
- Bai, R.; Jiang, H.; Lei, Z.; Li, W. A novel 2nd-order shape function based digital image correlation method for large deformation measurements. Opt. Las. Eng. 2017, 90, 48–58. [Google Scholar] [CrossRef]
- Pan, B.; Xie, H.; Wang, Z.; Qian, K.; Wang, Z. Study on subset size selection in digital image correlation for speckle patterns. Opt. Express 2008, 16, 7037. [Google Scholar] [CrossRef] [PubMed]
- Pan, B. An evaluation of convergence criteria for digital image correlation using inverse compositional gauss–newton algorithm. Strain 2014, 50, 48–56. [Google Scholar] [CrossRef]
- Silva, L.C.; Petraglia, M.R.; Petraglia, A. A robust method for camera calibration and 3-D reconstruction for stereo vision systems. In Proceedings of the 2004 12th European Signal Processing Conference, Vienna, Austria, 6–10 September 2004; pp. 1151–1154. [Google Scholar]
- Asundi, A.; Pan, B.; Xie, H.; Gao, J. Improved speckle projection profilometry for out-of-plane shape measurement. Appl. Opt. 2008, 47, 5527–5533. [Google Scholar]
- Barone, S.; Neri, P.; Paoli, A.; Razionale, A. Digital image correlation based on projected pattern for high frequency vibration measurements. Procedia Manuf. 2017, 11, 1592–1599. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Muja, M. Flann-Fast Library for Approximate Nearest Neighbors User Manual. 2009. Available online: https://www.cs.ubc.ca/research/flann/uploads/FLANN/flann_manual-1.6.11.pdf (accessed on 2 February 2018).
- Huang, J.; Zhu, T.; Pan, X.; Qin, L.; Peng, X.; Xiong, C.; Fang, J. A high-efficiency digital image correlation method based on a fast recursive scheme. Meas. Sci. Technol. 2010, 21, 35101–35112. [Google Scholar] [CrossRef]
- Pan, B.; Xie, H.; Wang, Z. Equivalence of digital image correlation criteria for pattern matching. Appl. Opt. 2010, 49, 5501–5509. [Google Scholar] [CrossRef] [PubMed]
- Zhou, P.; Goodson, K.E. Subpixel displacement and deformation gradient measurement using digital image/speckle correlation (disc). Opt. Eng. 2001, 40, 1613–1620. [Google Scholar] [CrossRef]
- Huang, J.; Pan, X.; Shanshan, L.I.; Peng, X.; Xiong, C.; Fang, J. A digital volume correlation technique for 3-D deformation measurements of soft gels. Int. J. Appl. Mech. 2011, 3, 335–354. [Google Scholar] [CrossRef]
- Yuan, Y.; Huang, J.; Peng, X.; Xiong, C.; Fang, J.; Yuan, F. Accurate displacement measurement via a self-adaptive digital image correlation method based on a weighted znssd criterion. Opt. Lasers Eng. 2014, 52, 75–85. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhan, Q.; Xiong, C.; Huang, J. Digital image correlation based on a fast convolution strategy. Opt. Lasers Eng. 2017, 97, 52–61. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SS | -ROI1 | -ROI2 | -ROI1&2 | -ROI1 | -ROI2 | -ROI1&2 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1st | 2nd | 1st | 2nd | 1st | 2nd | 1st | 2nd | 1st | 2nd | 1st | 2nd | |
| 15 | 0.02029 | 0.01755 | 0.00749 | 0.01661 | 0.01621 | 0.01709 | 0.02869 | 0.02800 | 0.01211 | 0.02673 | 0.02202 | 0.02738 |
| 17 | 0.02467 | 0.01422 | 0.00632 | 0.01324 | 0.01949 | 0.01375 | 0.03365 | 0.02284 | 0.01018 | 0.02149 | 0.02486 | 0.02218 |
| 19 | 0.02981 | 0.01207 | 0.00552 | 0.01108 | 0.02354 | 0.01159 | 0.03982 | 0.01942 | 0.00886 | 0.01800 | 0.02884 | 0.01872 |
| 21 | 0.03553 | 0.01065 | 0.00496 | 0.00952 | 0.02815 | 0.01012 | 0.04688 | 0.01713 | 0.00793 | 0.01540 | 0.03362 | 0.01629 |
| 23 | 0.04173 | 0.00977 | 0.00450 | 0.00826 | 0.03319 | 0.00908 | 0.05468 | 0.01563 | 0.00719 | 0.01342 | 0.03900 | 0.01457 |
| 25 | 0.04830 | 0.00941 | 0.00416 | 0.00736 | 0.03858 | 0.00851 | 0.06307 | 0.01484 | 0.00665 | 0.01192 | 0.04485 | 0.01346 |
| 27 | 0.05517 | 0.00941 | 0.00389 | 0.00667 | 0.04422 | 0.00827 | 0.07194 | 0.01457 | 0.00625 | 0.01073 | 0.05106 | 0.01280 |
| 29 | 0.06228 | 0.00994 | 0.00369 | 0.00612 | 0.05009 | 0.00844 | 0.08120 | 0.01497 | 0.00592 | 0.00978 | 0.05757 | 0.01264 |
| 31 | 0.06960 | 0.01099 | 0.00350 | 0.00567 | 0.05615 | 0.00904 | 0.09079 | 0.01601 | 0.00569 | 0.00903 | 0.06433 | 0.01299 |
| 33 | 0.07707 | 0.01254 | 0.00335 | 0.00530 | 0.06233 | 0.01006 | 0.10065 | 0.01763 | 0.00555 | 0.00841 | 0.07128 | 0.01381 |
| 35 | 0.08466 | 0.01454 | 0.00321 | 0.00498 | 0.06862 | 0.01148 | 0.11072 | 0.01985 | 0.00548 | 0.00786 | 0.07839 | 0.01510 |
| Threshold for | -ROI1 | -ROI2 | -ROI1&2 | |||
|---|---|---|---|---|---|---|
| IC-GN1 | IC-GN2 | IC-GN1 | IC-GN2 | IC-GN1 | IC-GN2 | |
| 0.1 | 1.0110 | 1.4293 | 1.0024 | 1.3989 | 1.0063 | 1.4141 |
| 0.01 | 1.4927 | 2.4875 | 1.3874 | 2.4457 | 1.4401 | 2.4666 |
| 0.001 | 2.4787 | 3.8182 | 2.3830 | 3.7693 | 2.4308 | 3.7937 |
| 0.0001 | 3.6110 | 5.1762 | 3.5212 | 5.1098 | 3.5661 | 5.1430 |
| Point Number | Standard Deviation | Positive Maximum | Negative Maximum | |
|---|---|---|---|---|
| Plane | 15 | 0.001 mm | 0.003 mm | −0.004 mm |
| Cylinder | 44 | 0.004 mm | 0.011 mm | −0.008 mm |
| SS | Plane | Cylinder | Back of Head | ||||||
|---|---|---|---|---|---|---|---|---|---|
| (%) | (%) | (%) | |||||||
| IC-GN1 | IC-GN2 | IC-GN1 | IC-GN2 | IC-GN1 | IC-GN2 | ||||
| 15 | 90,000 | 99.93 | 99.84 | 90,000 | 100 | 99.01 | 62,500 | 63.95 | 98.77 |
| 17 | 90,000 | 99.99 | 99.97 | 90,000 | 100 | 99.29 | 62,500 | 64.52 | 98.93 |
| 19 | 90,000 | 100 | 99.97 | 90,000 | 100 | 99.31 | 62,500 | 65.09 | 99.00 |
| 21 | 90,000 | 100 | 99.98 | 90,000 | 100 | 99.35 | 62,500 | 65.55 | 98.99 |
| 23 | 90,000 | 100 | 99.98 | 90,000 | 100 | 99.38 | 62,500 | 65.62 | 98.99 |
| 25 | 90,000 | 100 | 99.98 | 90,000 | 100 | 99.38 | 62,500 | 66.27 | 98.98 |
| 27 | 90,000 | 100 | 99.98 | 90,000 | 100 | 99.38 | 62,500 | 67.01 | 99.01 |
| 29 | 90,000 | 100 | 99.98 | 90,000 | 100 | 99.35 | 62,500 | 67.71 | 98.99 |
| 31 | 90,000 | 100 | 99.98 | 90,000 | 100 | 99.40 | 62,500 | 68.15 | 98.97 |
| 33 | 90,000 | 100 | 99.98 | 90,000 | 100 | 99.41 | 62,500 | 68.60 | 98.89 |
| 35 | 90,000 | 100 | 99.98 | 90,000 | 100 | 99.38 | 62,500 | 68.80 | 98.88 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Chen, X.; Xi, J. Comparative Analysis of Warp Function for Digital Image Correlation-Based Accurate Single-Shot 3D Shape Measurement. Sensors 2018, 18, 1208. https://doi.org/10.3390/s18041208
Yang X, Chen X, Xi J. Comparative Analysis of Warp Function for Digital Image Correlation-Based Accurate Single-Shot 3D Shape Measurement. Sensors. 2018; 18(4):1208. https://doi.org/10.3390/s18041208
Chicago/Turabian StyleYang, Xiao, Xiaobo Chen, and Juntong Xi. 2018. "Comparative Analysis of Warp Function for Digital Image Correlation-Based Accurate Single-Shot 3D Shape Measurement" Sensors 18, no. 4: 1208. https://doi.org/10.3390/s18041208