A Method on Dynamic Path Planning for Robotic Manipulator Autonomous Obstacle Avoidance Based on an Improved RRT Algorithm

Abstract
:1. Introduction
2. Improved RRT Algorithm
2.1. Traditional RRT Algorithm
- T.init(qinit);
- for k = 1 to k do
- qrand ← Random_State()
- Extend(T, qrand);
- Return T
- qnear←Nearest_Neighbor(q, T);
- If New_State(q, qnear, qnew, unew) then
- T.add_vertex(qnew);
- T.add_edge(qnear, qnew, unew);
- if qnew = q then
- Return Reached;
- else
- Return Advanced;
- Return Trapped;
2.2. Node Extension
- p←Random(0, 1.0)
- if p < Pgoal;
- Return goal;
- else
- Return RandomNode();
- result←Extend(T, goal)
- if Trapped = result
- qrand←Random_Node()
- while Trapped = Extend(T, goal)
- Random_Extend(T, qgoal);
- else
- Improve_Extend(T)
- p←Random(0, 1.0)
- if p < Pbest
- Extend(T, qnearest, q);
- else
- Extend(T, q);
2.3. Collision Inspection
- Forward_Kinematics(x);
- for k = 1 to 6 do
- Ck←FCL_Cylinder_Create(x, k)
- if FCL_Cylinder_Collision(Ck)
- Return Trapped;
- Return Advanced;
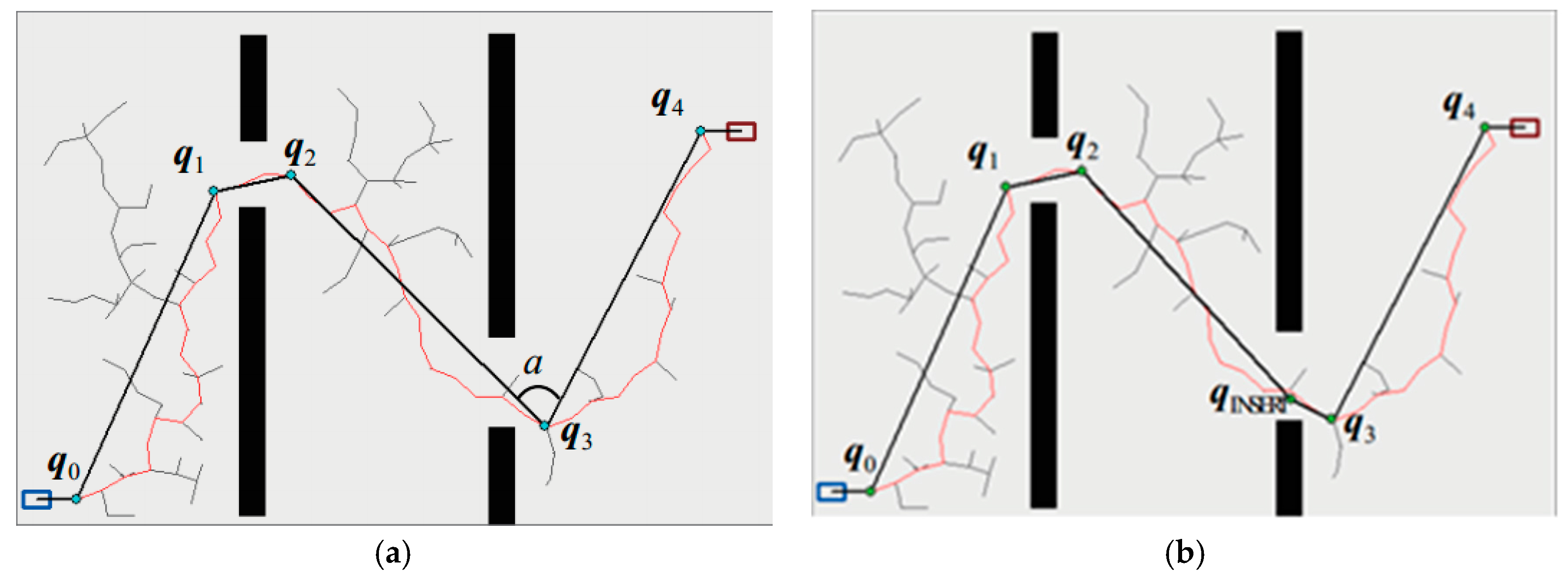
2.4. Trajectory Optimization
- Q←Pruning(T)
- Q←Inser_MidNode(Q)
- S←Cubic_Bspline(Q)
- Return S
- 5.
- T←obtained from S-RRT
- 6.
- Var Q1, Q2: path
- 7.
- Q1 (q0, q1, q2, ⋯, qn) = Path(T)
- 8.
- qtemp←q0; Q2.Add_Node(q0)
- 9.
- while qtemp! = qn do
- 10.
- for each node qi ∈ Q1
- 11.
- if Collision(qtemp, qi)
- 12.
- qtemp←qi;
- 13.
- Q2.Add_Node(qtemp);break
- 14.
- end if
- 15.
- end for
- 16.
- Q2.Add_Node(qn)
- 17.
- end while
- 18.
- for each node qk ∈ Q2
- 19.
- if Angle
- 20.
- Q2 Insert_Node(qk, qinsert, qk+1)
- 21.
- end if
- 22.
- end for
- 23.
- Return Q2
3. Simulation and Experiment
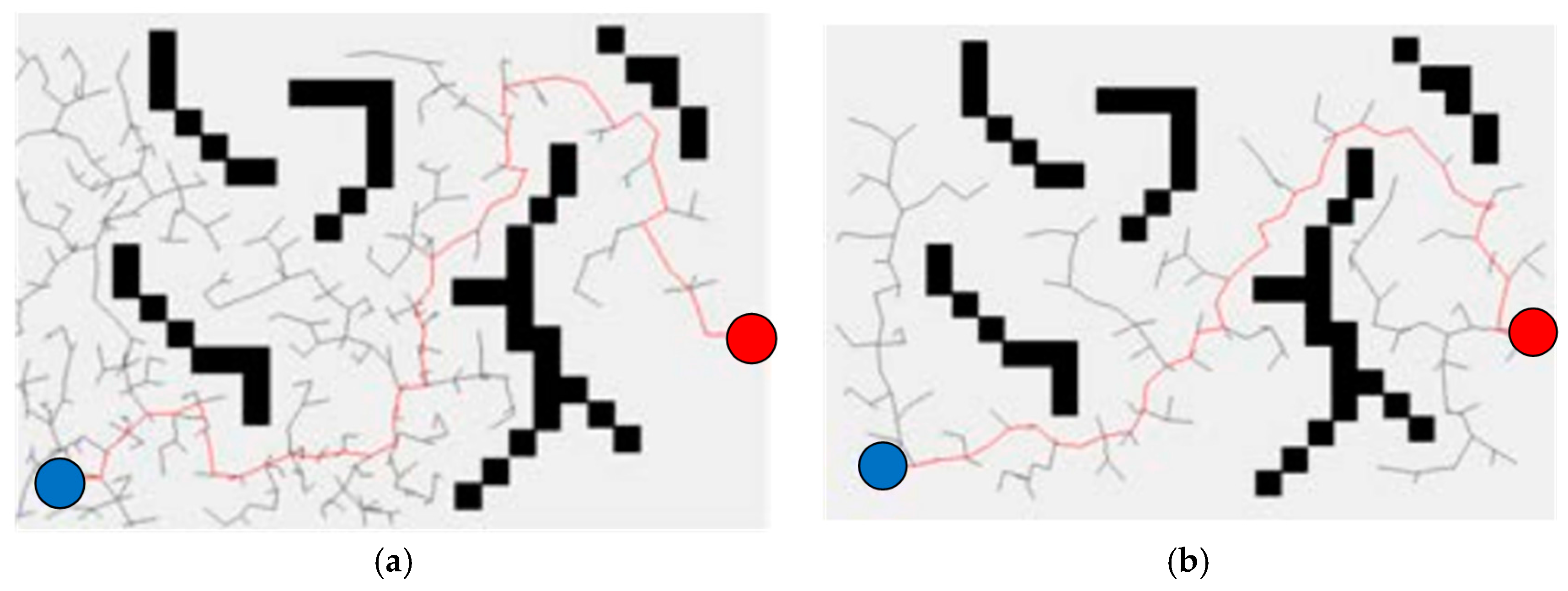
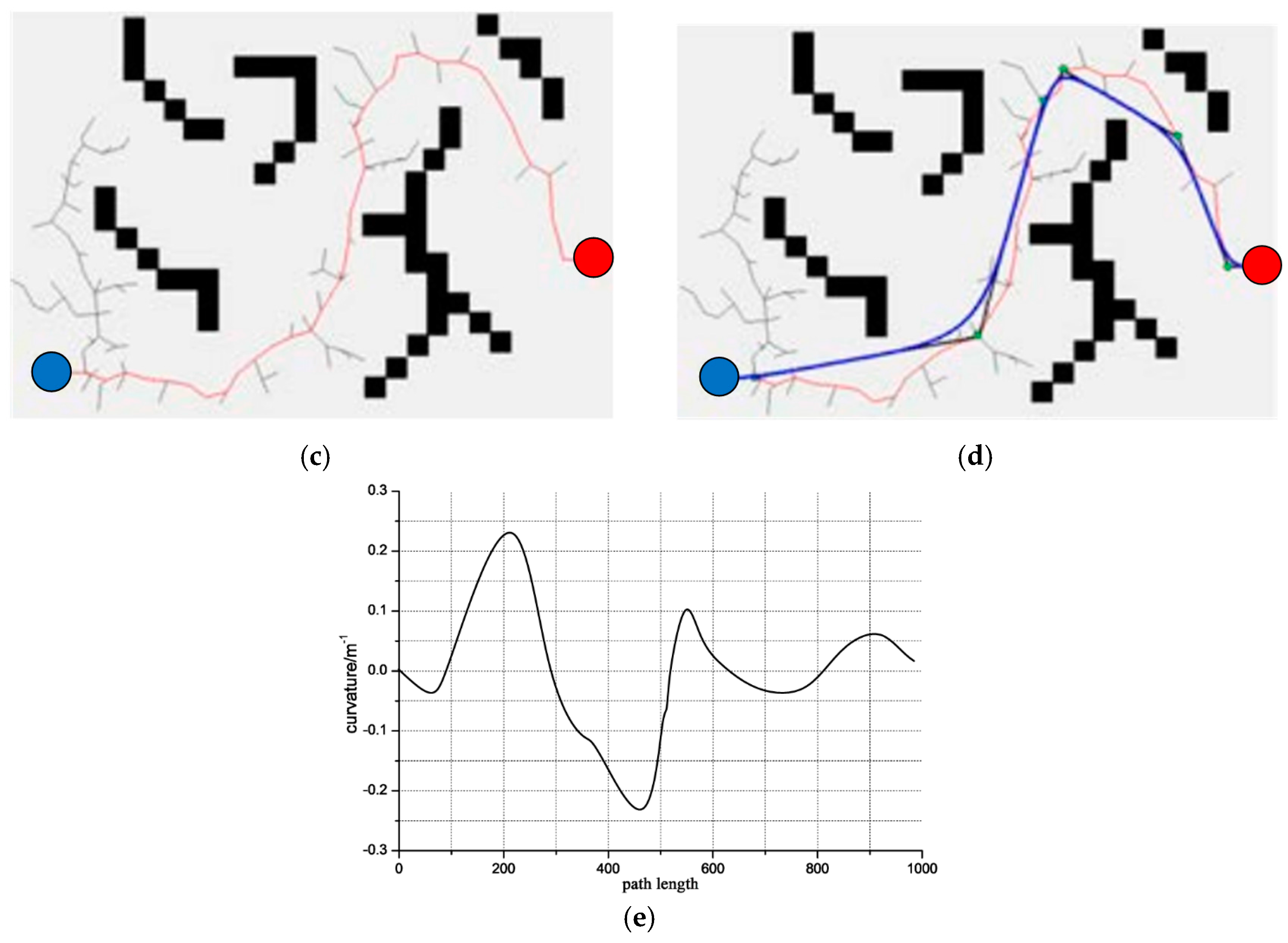
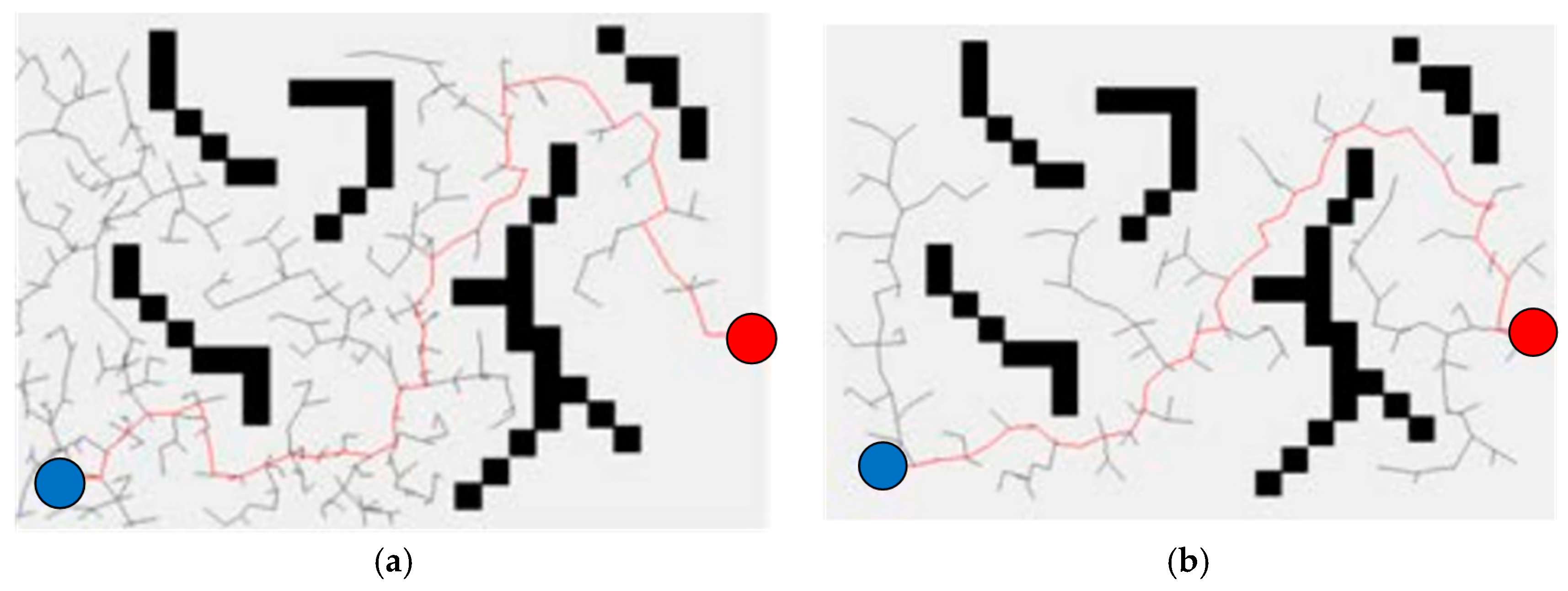
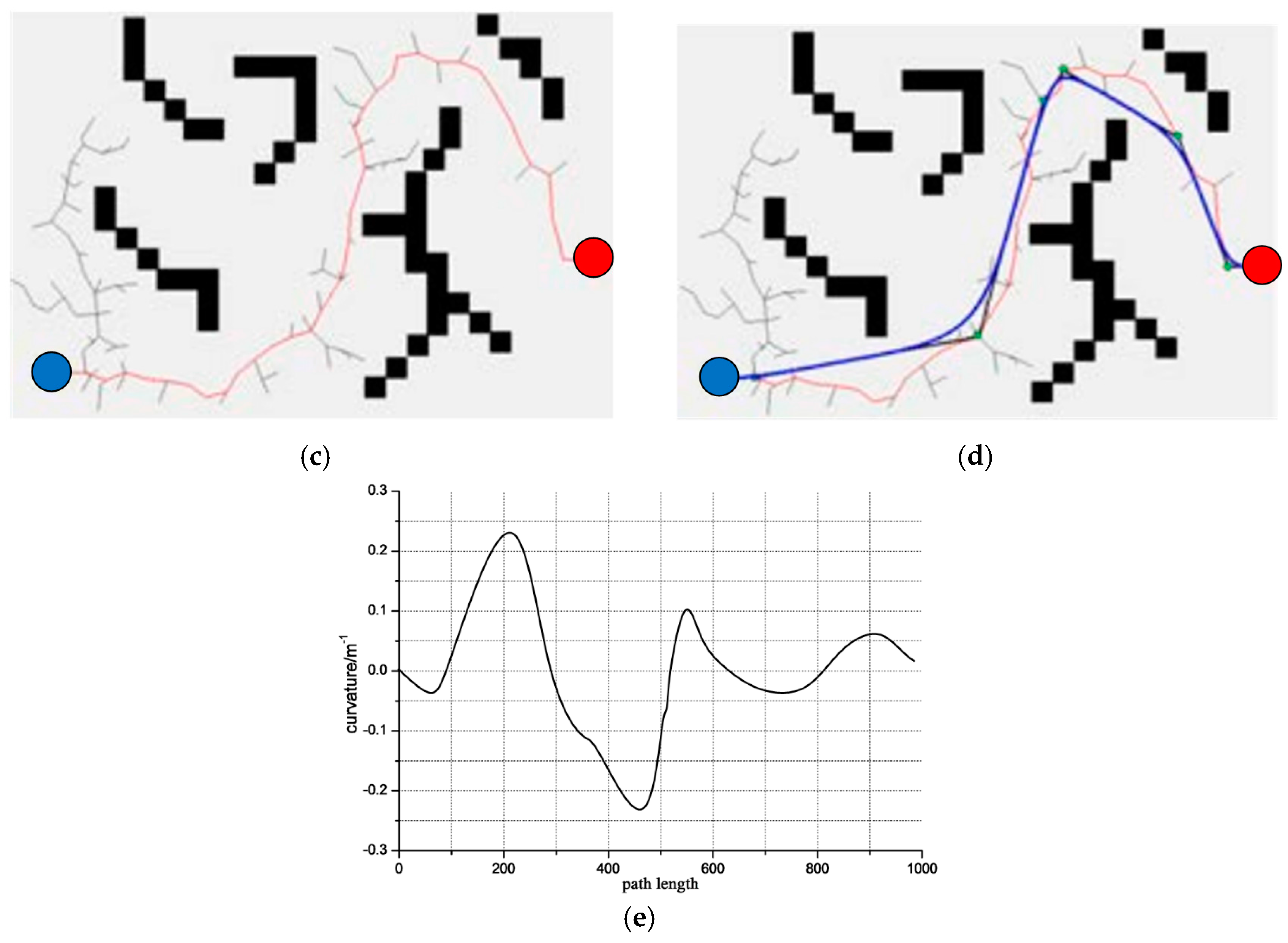
3.1. Simulation in a Static Environment Based on MATLAB
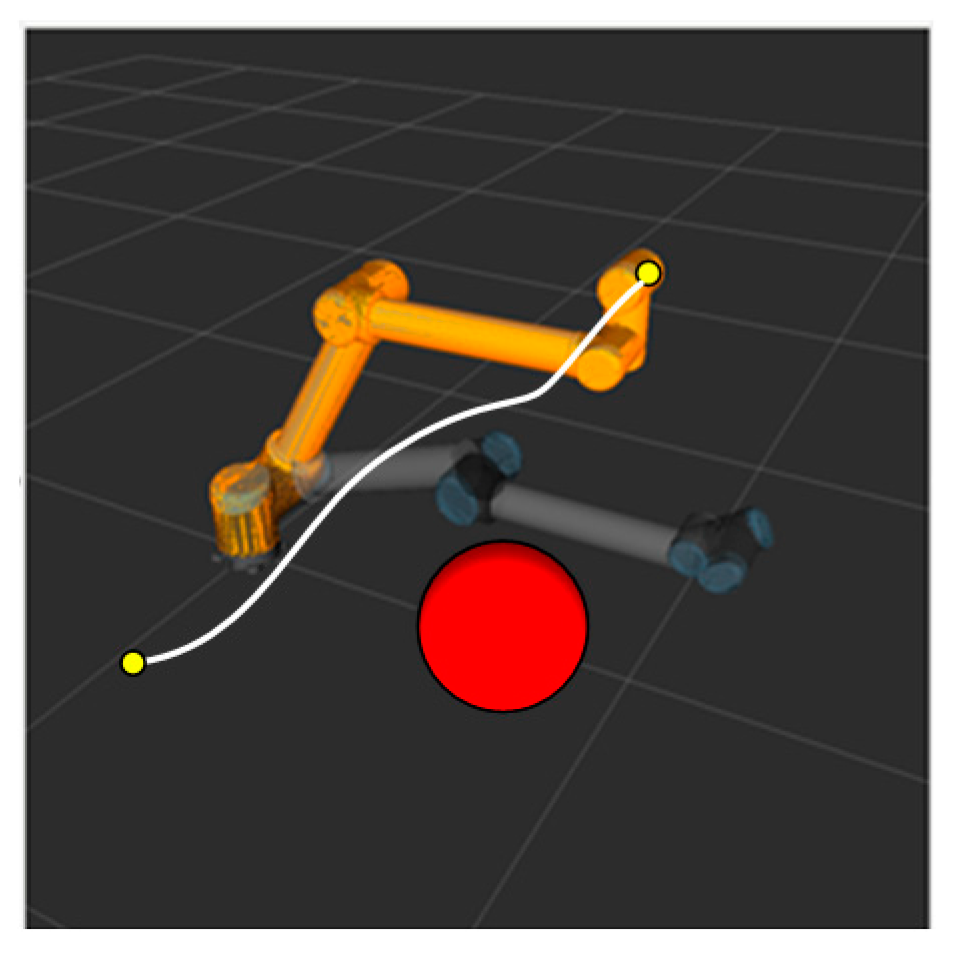
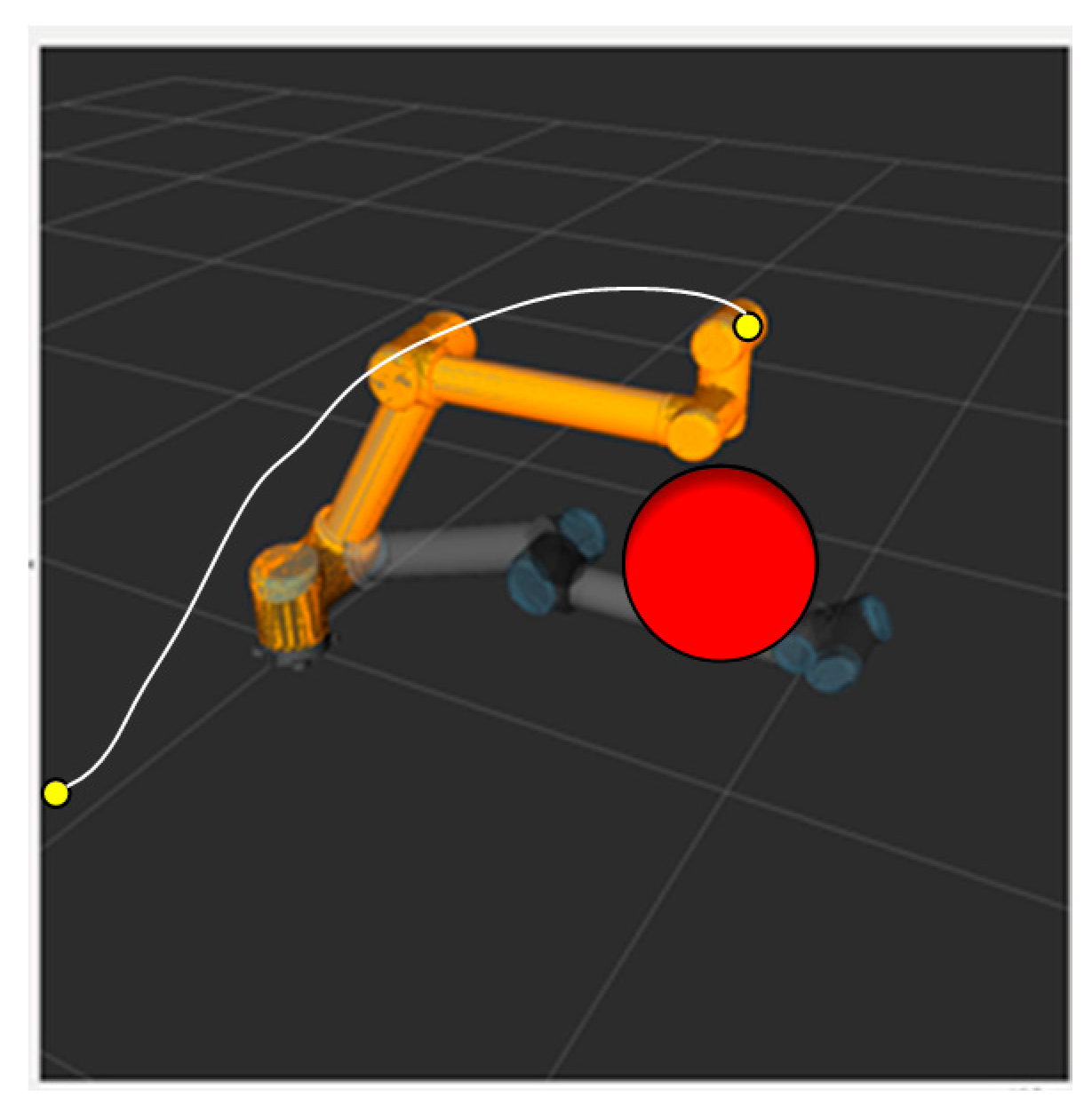
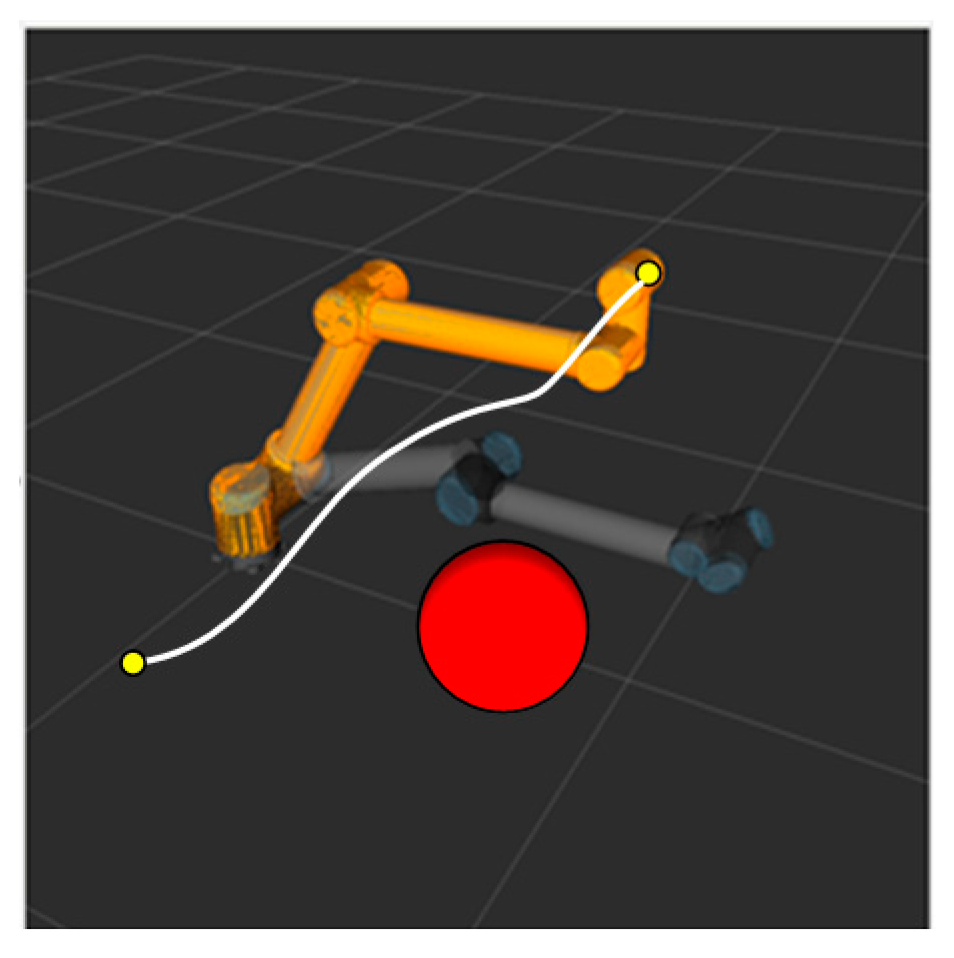
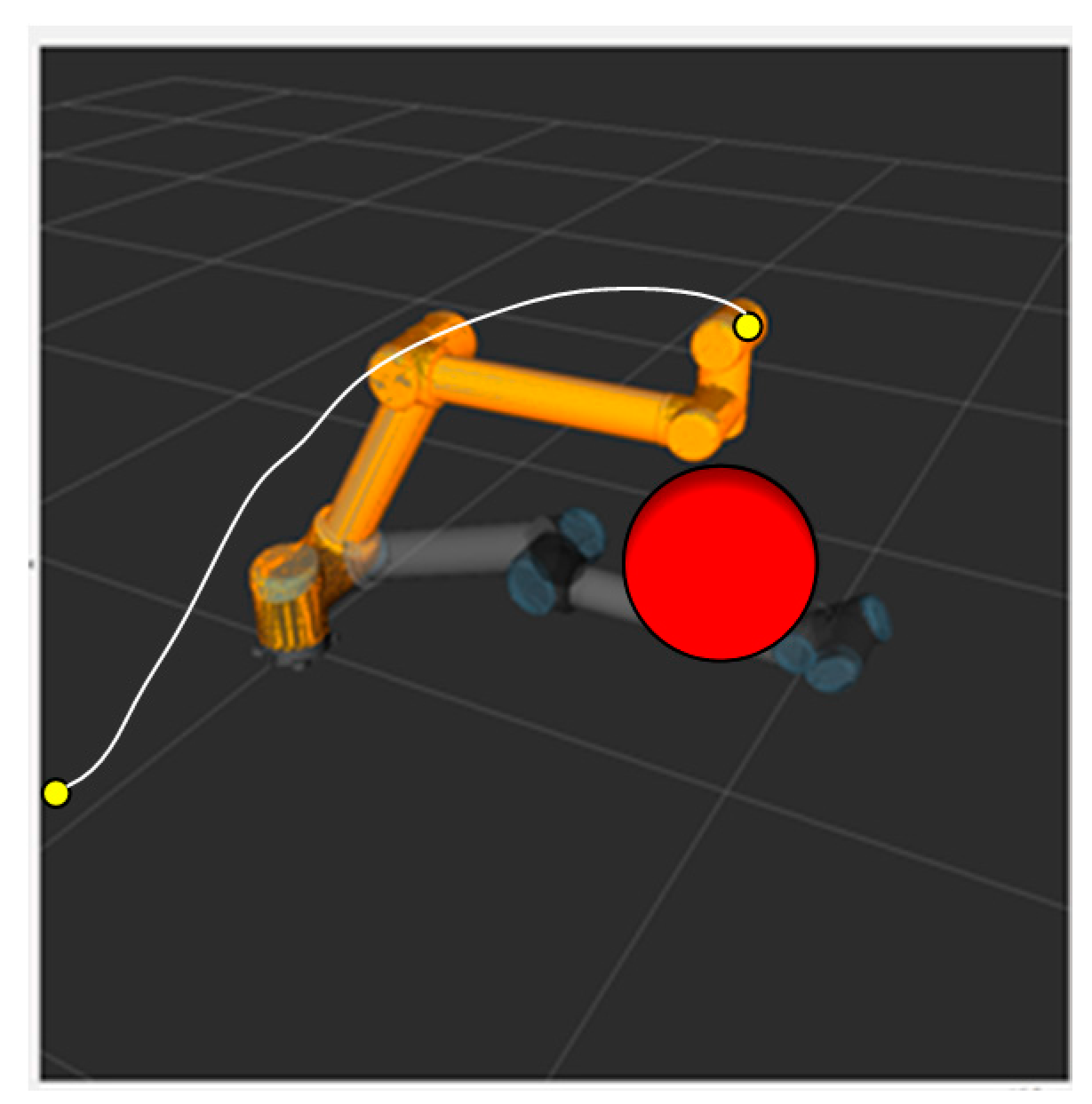
3.2. Simulation Validation in a Dynamic Environment Based on an ROS
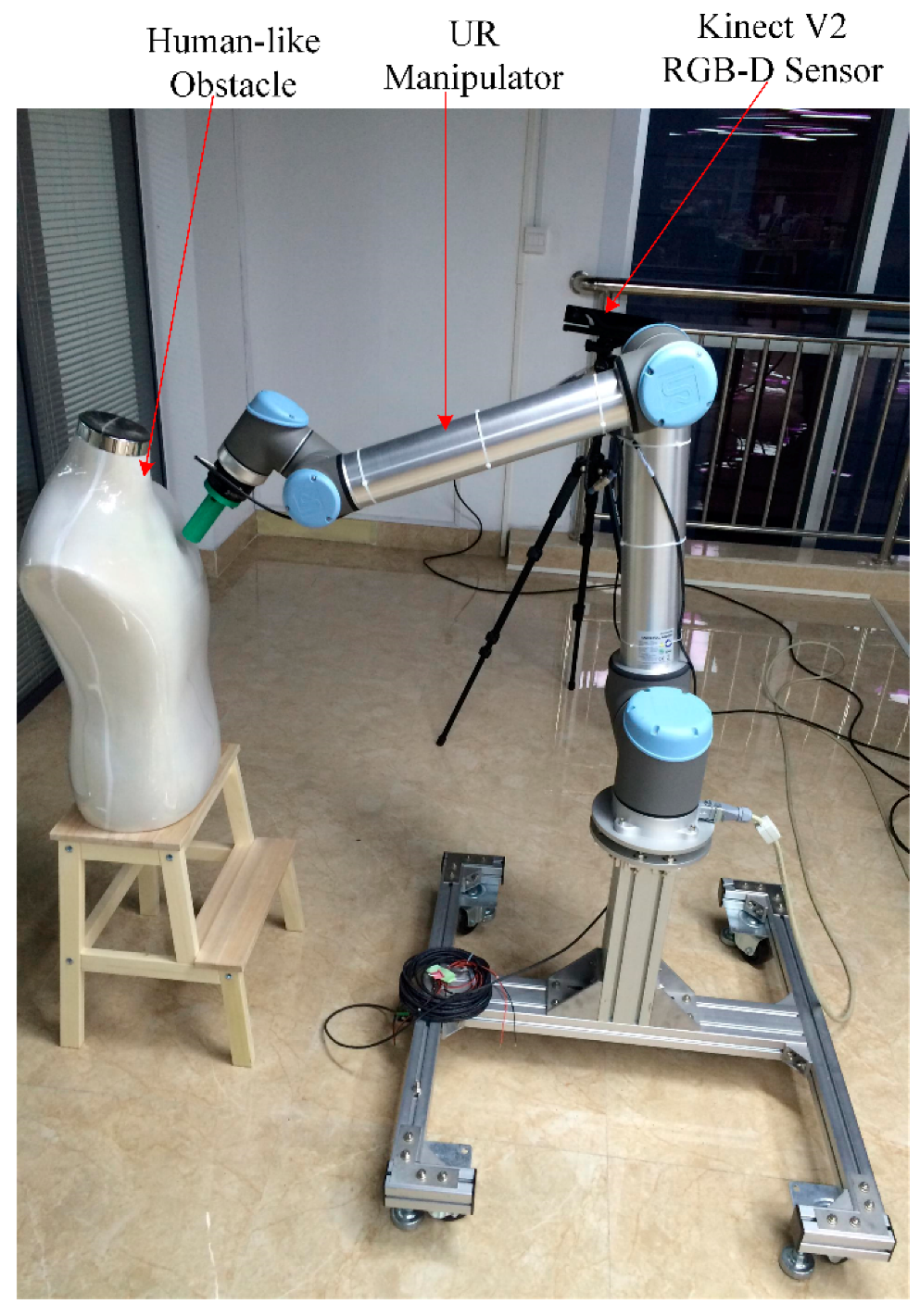
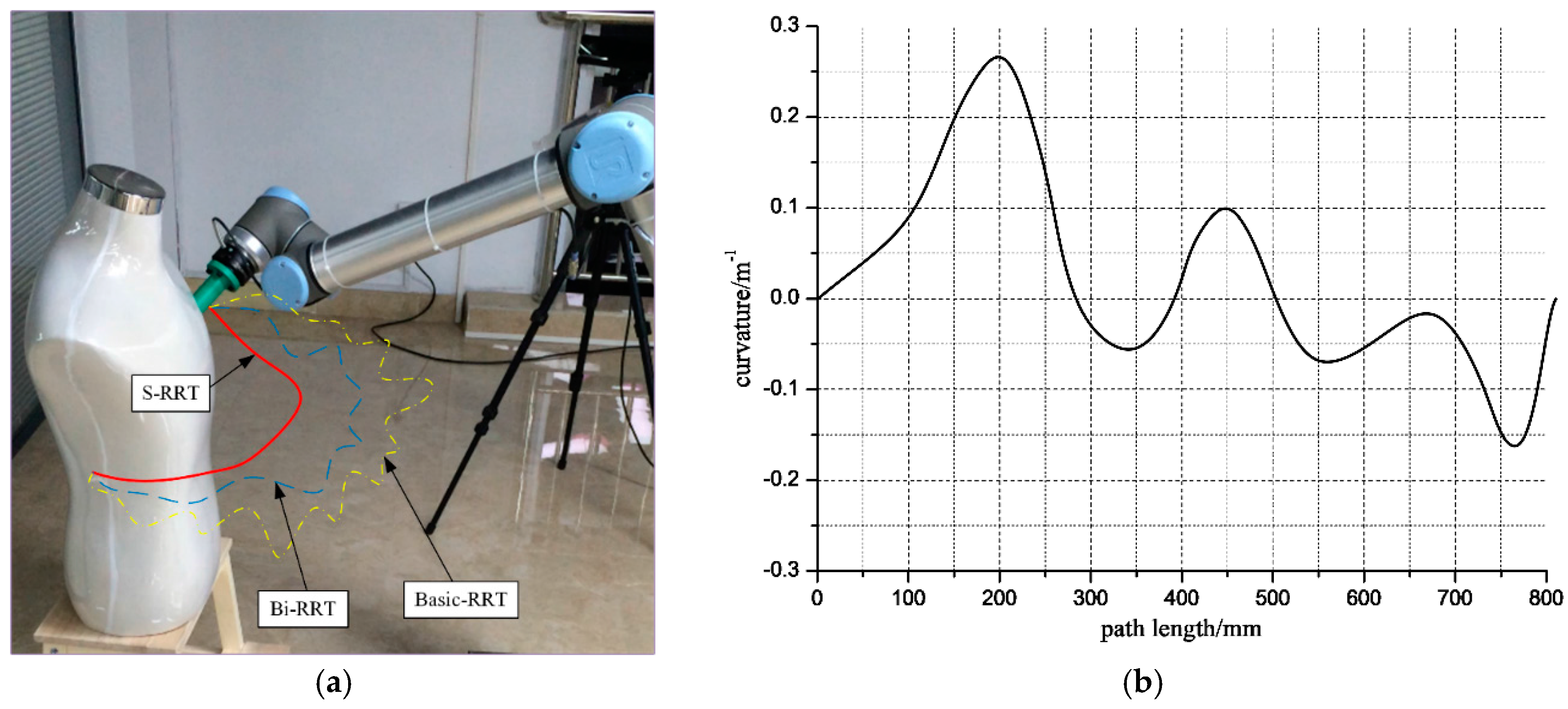
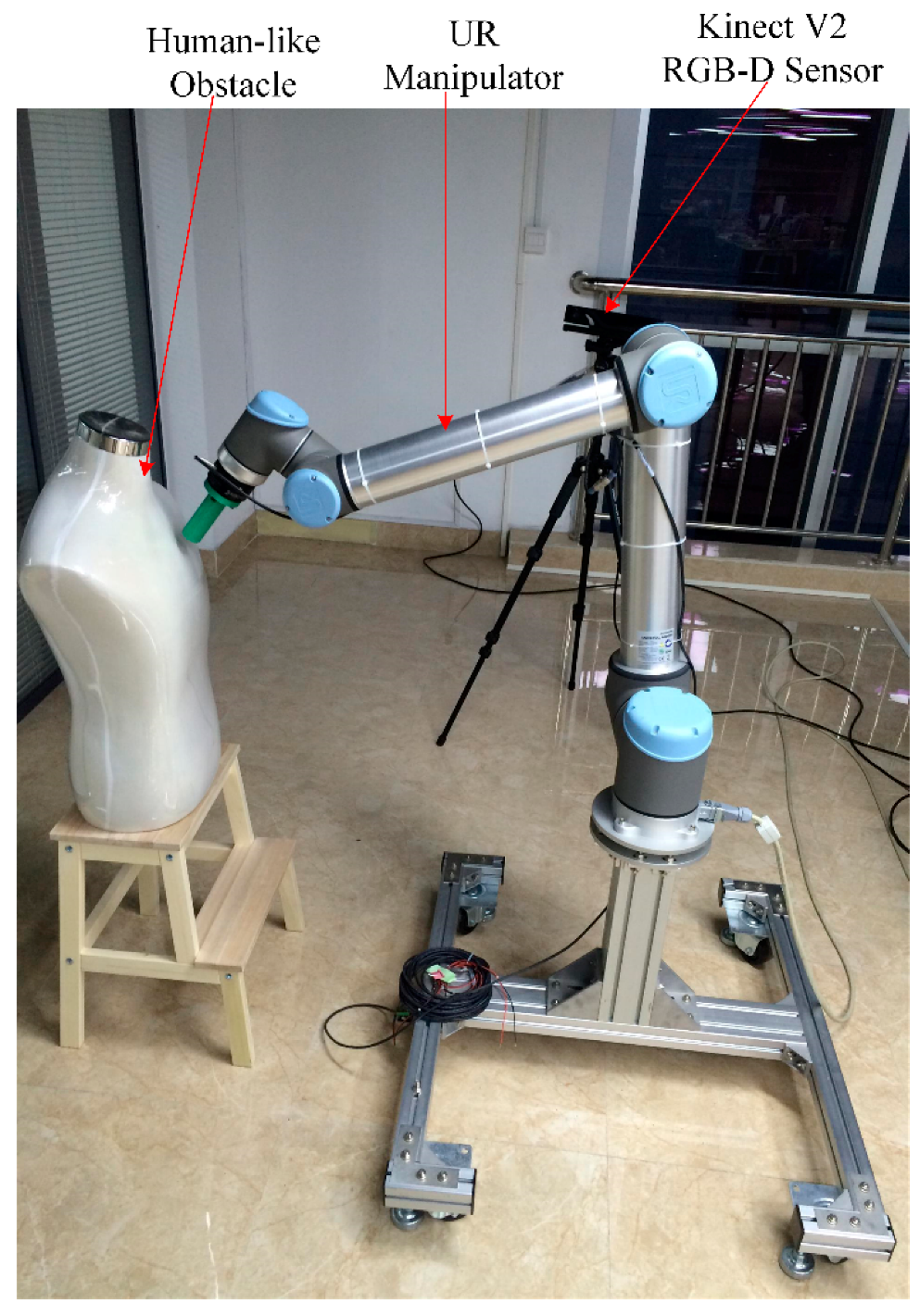
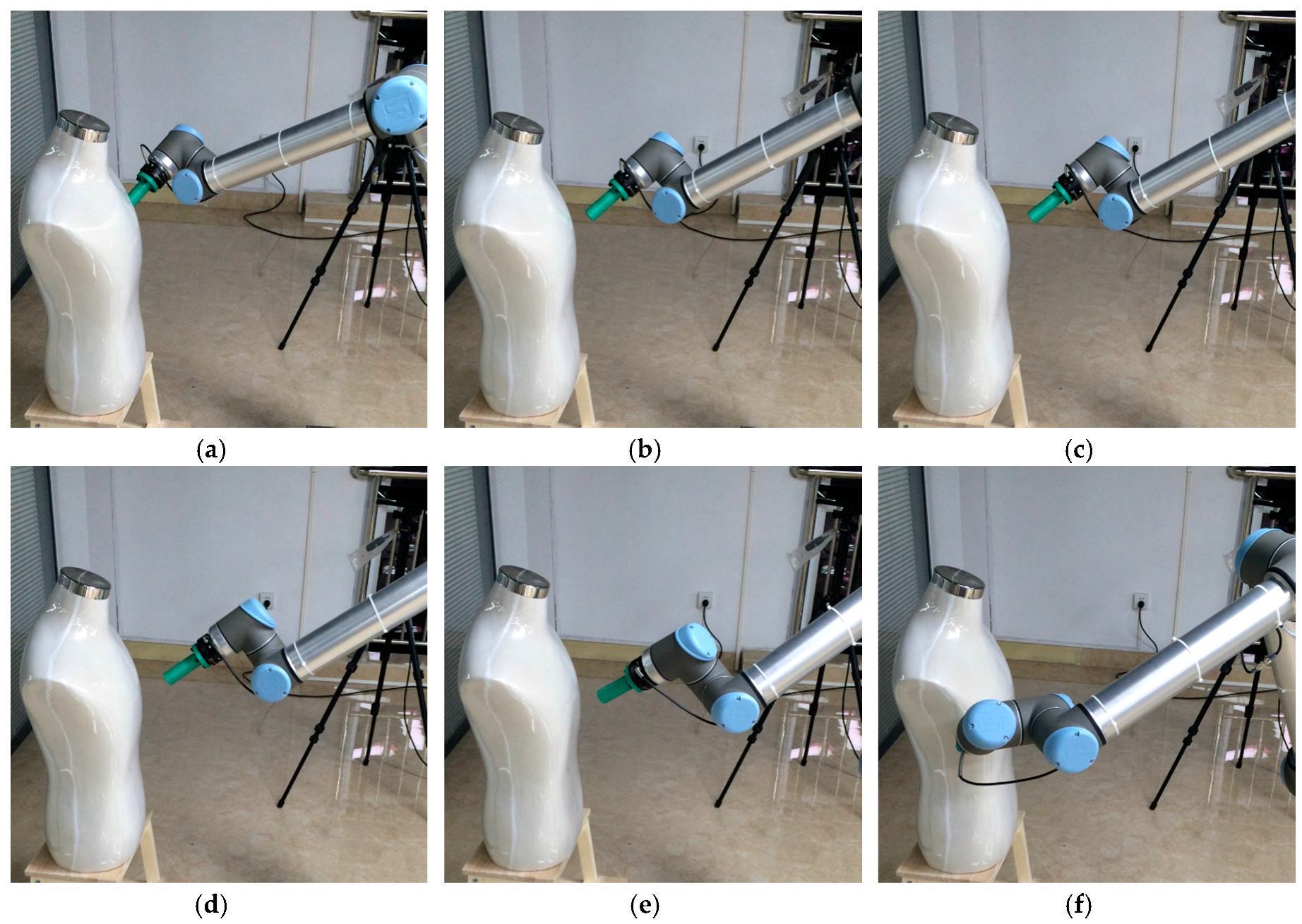
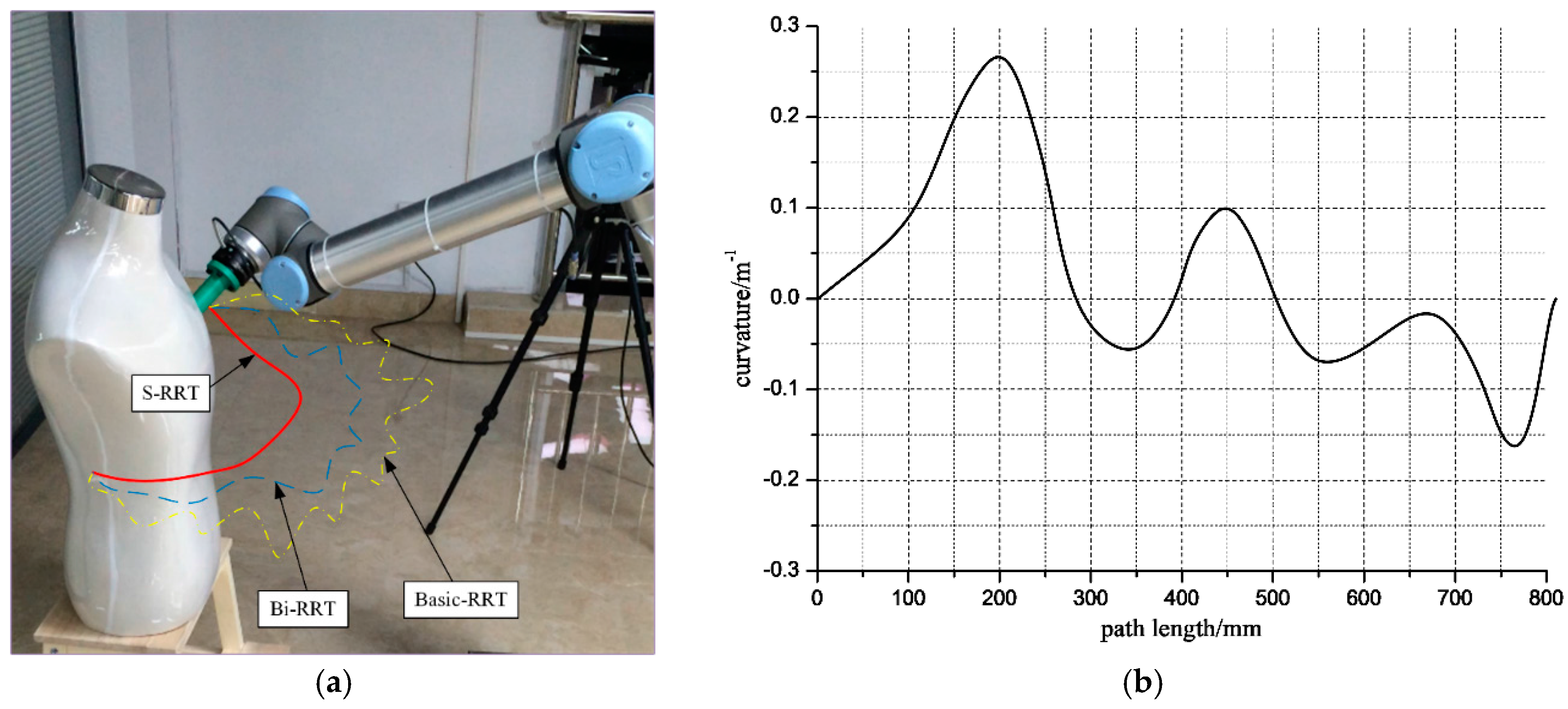
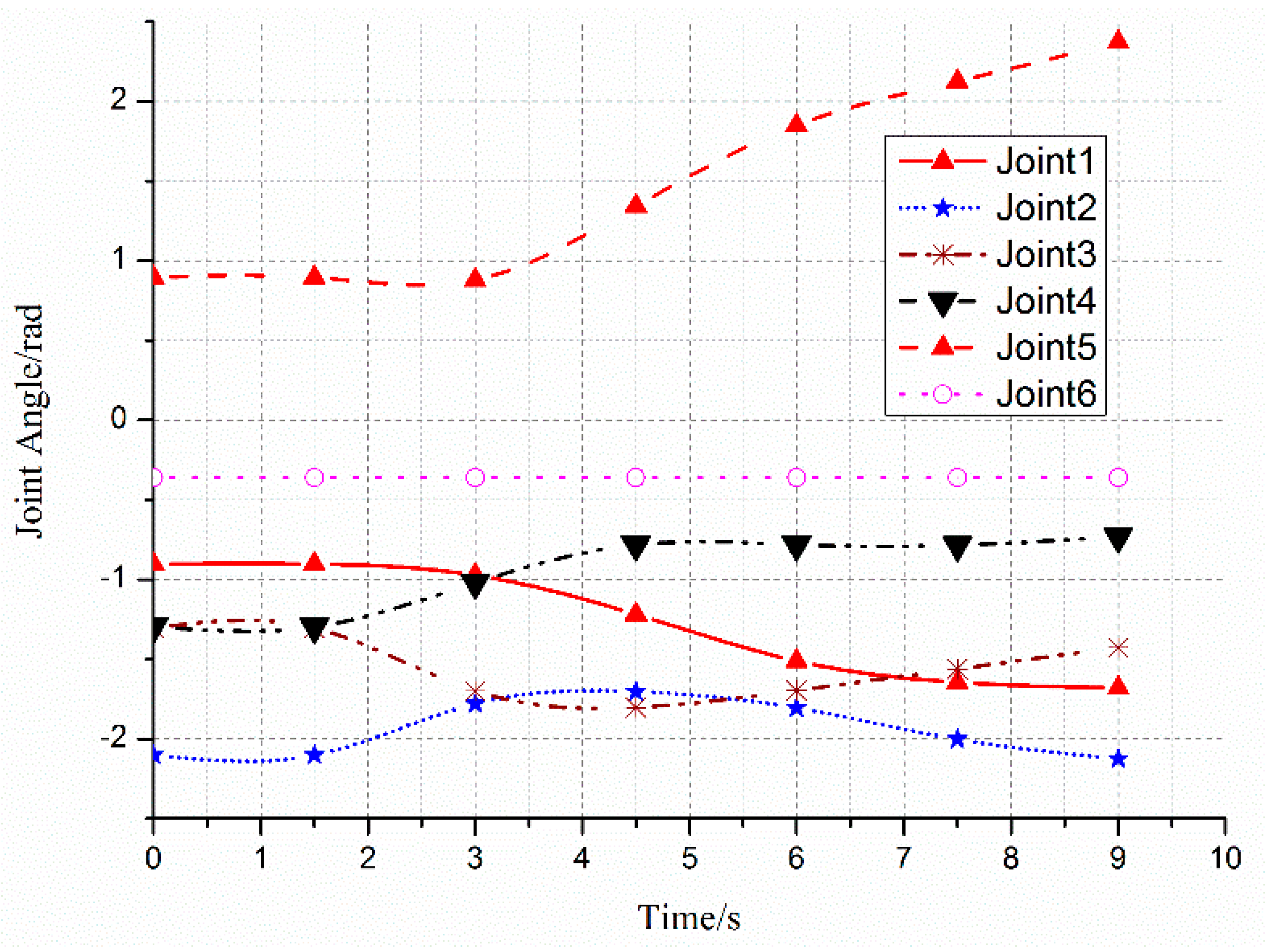
3.3. Experiment of Static Global Autonomous Obstacle Avoidance Path Planning
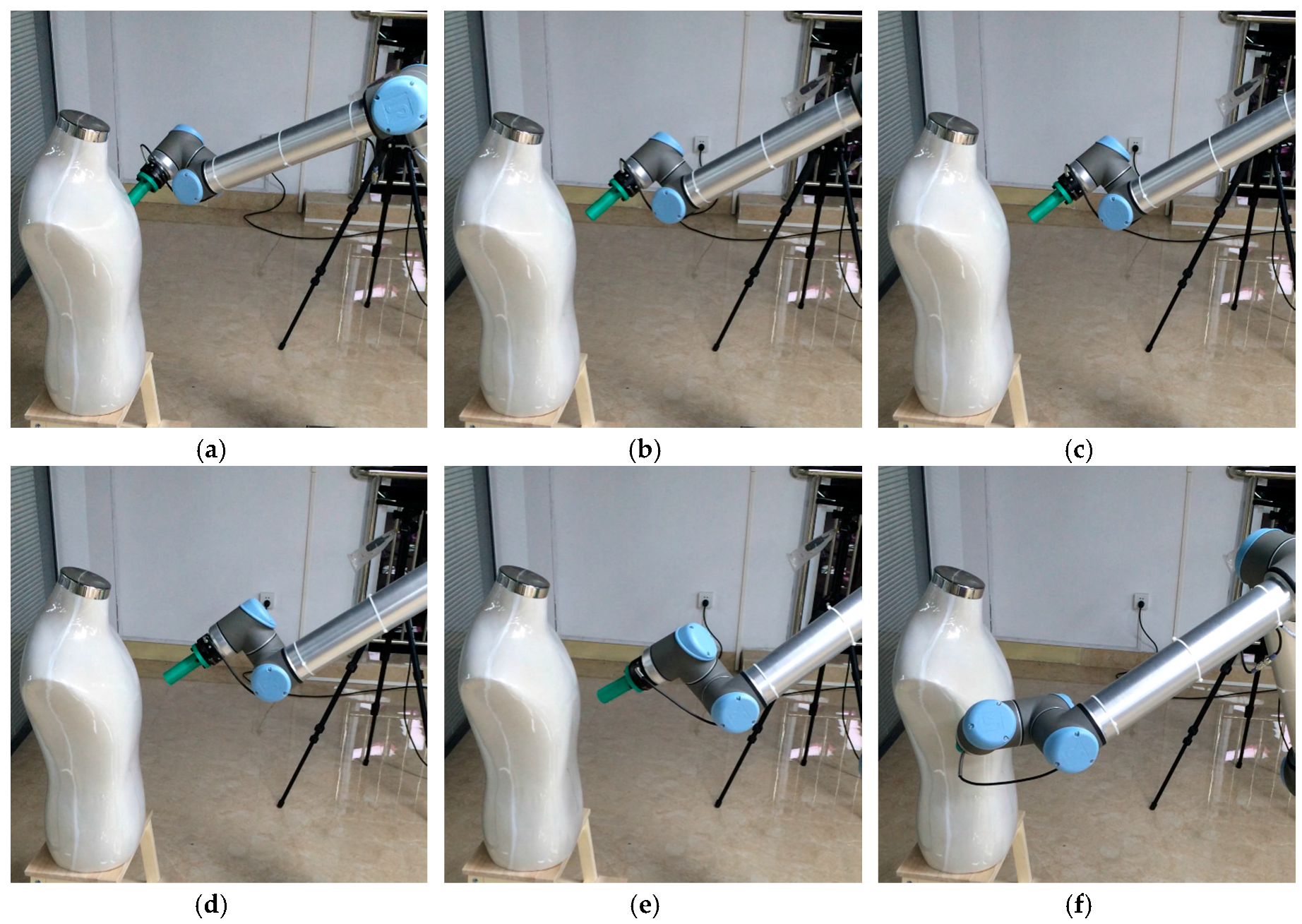
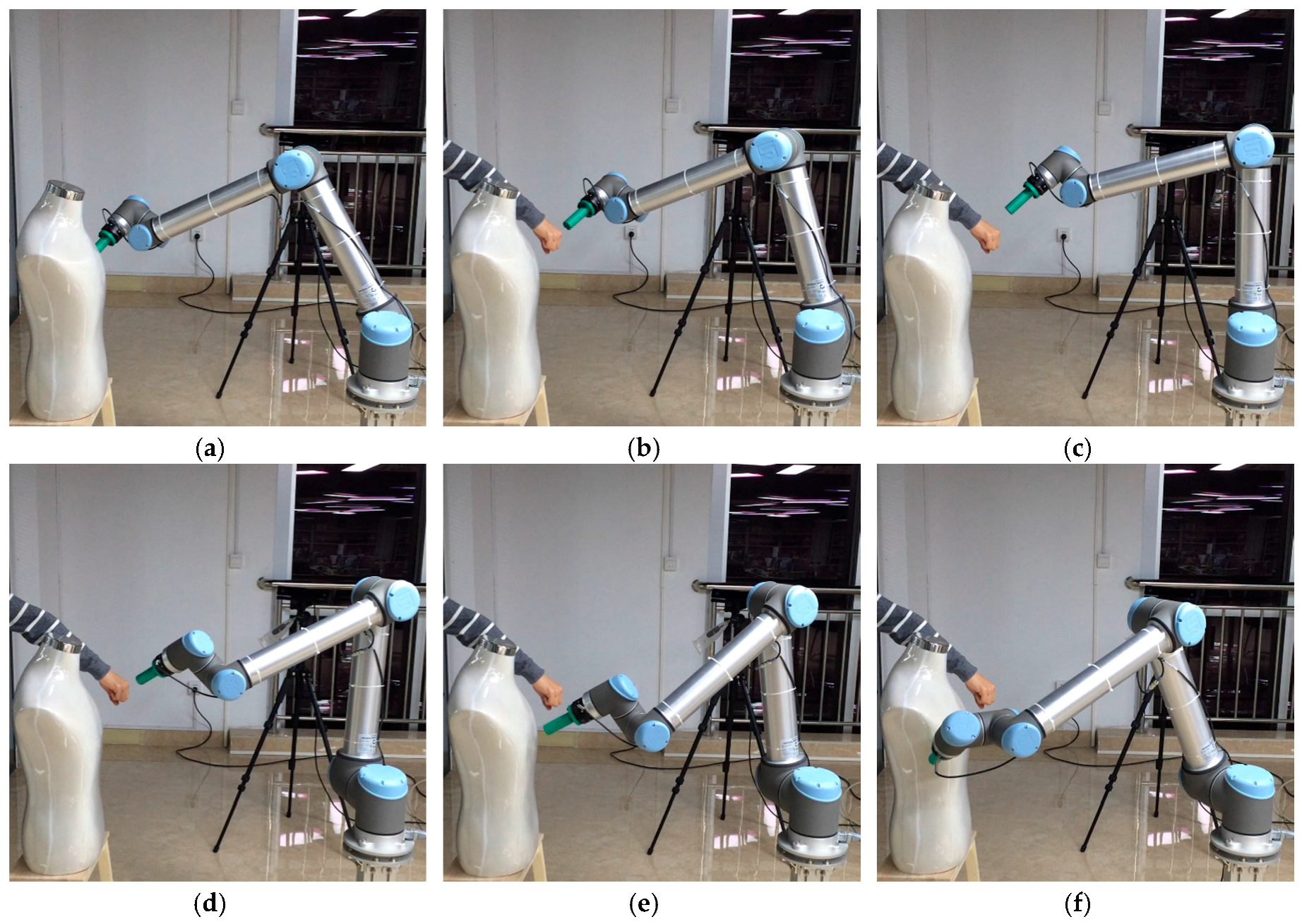
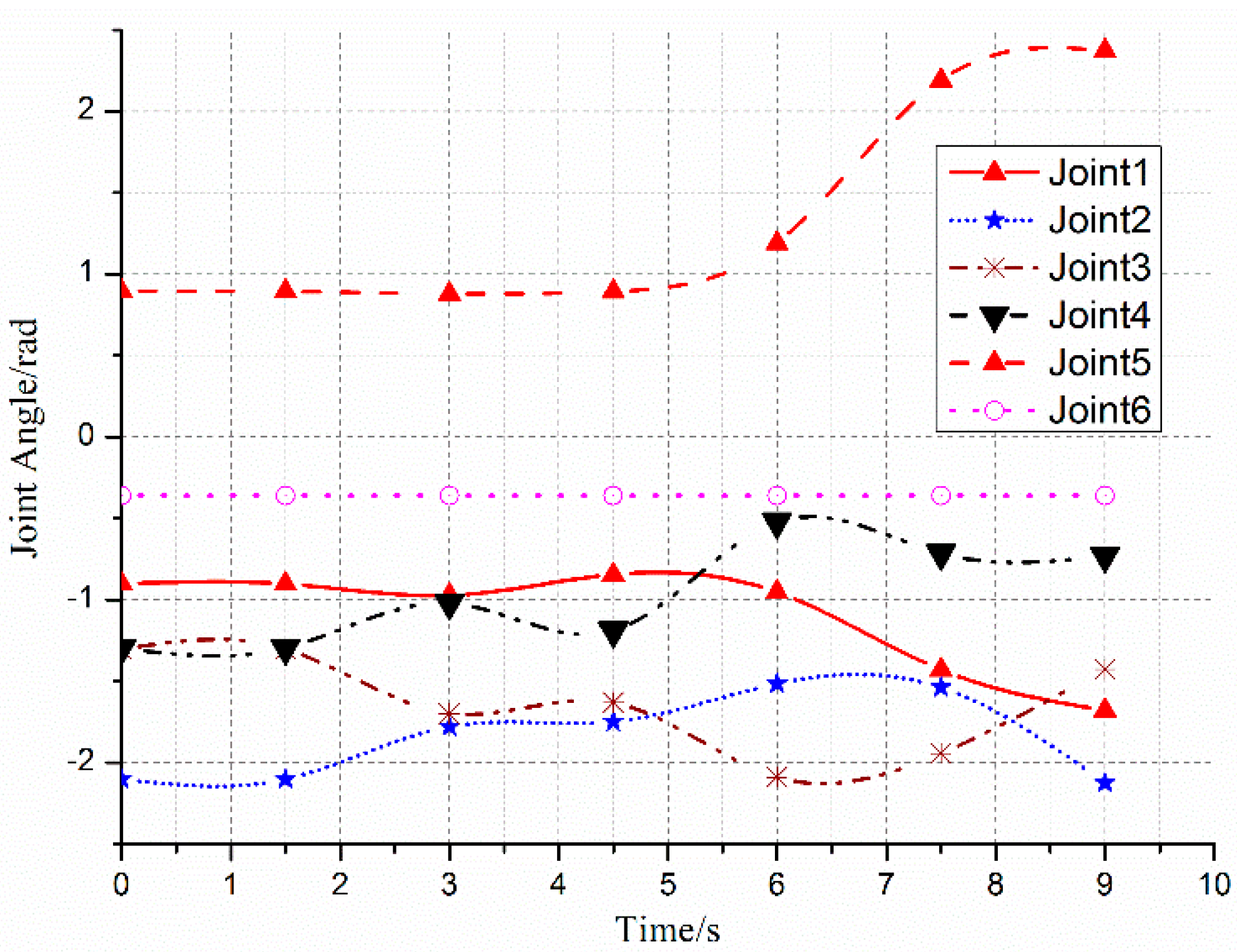
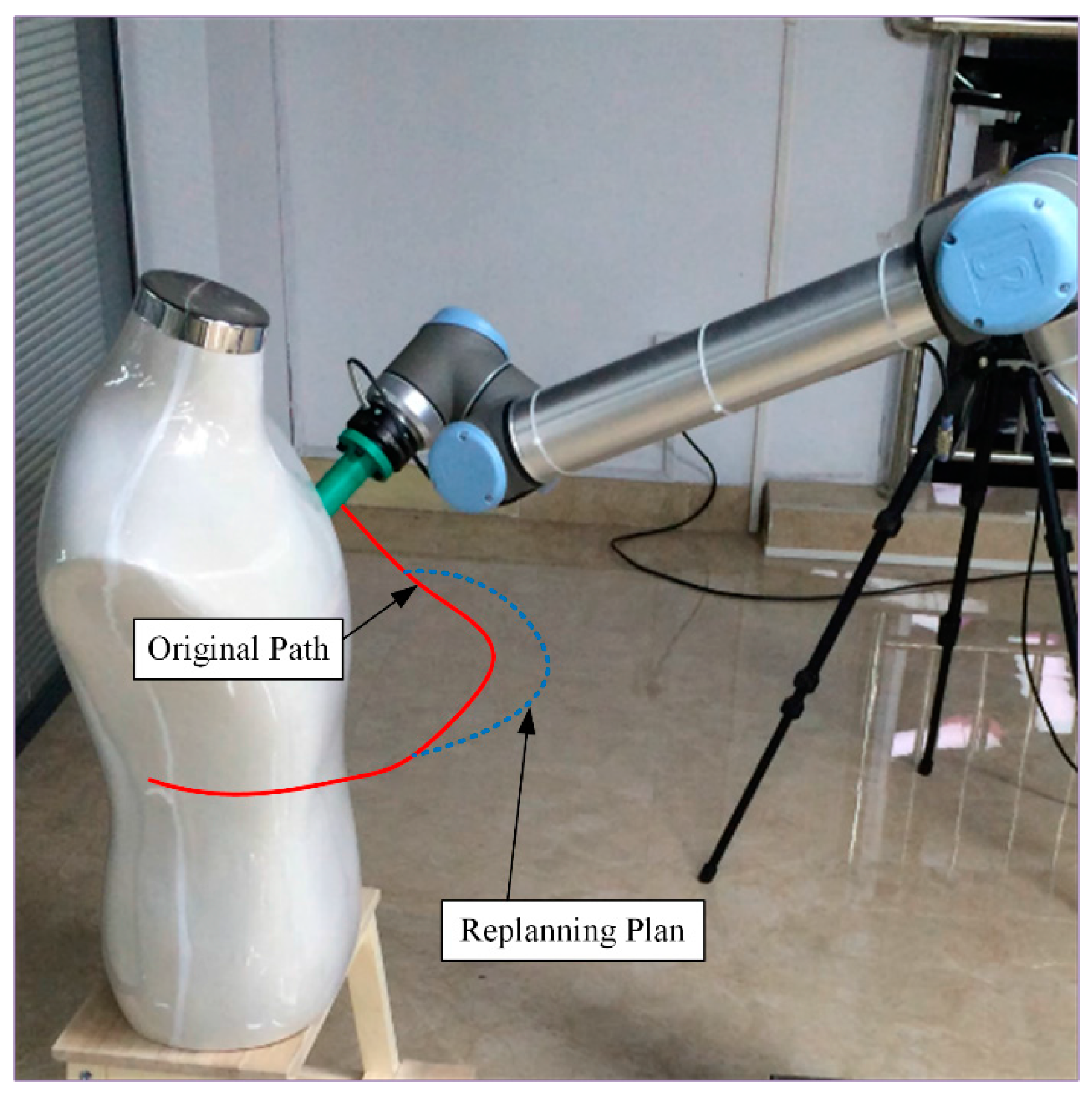
3.4. Experiment of Dynamic Local Autonomous Obstacle Avoidance Path Planning
4. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Han, D.; Nie, H.; Chen, J. Dynamic obstacle avoidance for manipulators using distance calculation and discrete detection. Robot. Comput. Integr. Manuf. 2018, 49, 98–104. [Google Scholar] [CrossRef]
- Park, C.; Pan, J.; Manocha, D. Real-time optimization-based planning in dynamic environments using GPUs. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4090–4097. [Google Scholar]
- Luo, R.C.; Kuo, C. Intelligent Seven-Dof Robot with dynamic obstacle avoidance and 3-D object recognition for industrial cyber-physical systems in manufacturing automation. Proc. IEEE 2016, 104, 1102–1113. [Google Scholar] [CrossRef]
- Indri, M.; Trapani, S.; Lazzero, I. Development of a virtual collision sensor for industrial robots. Sensors 2017, 17, 1148. [Google Scholar] [CrossRef] [PubMed]
- Ji, W.; Cheng, F.Y.; Zhao, D. Obstacle avoidance method of apple harvesting robot manipulator. Trans. Chin. Soc. Agric. Mach. 2013, 44, 253–259. [Google Scholar]
- He, Z.C.; He, Y.L.; Zeng, B. Obstacle avoidance path planning for robot arm based on mixed algorithm of artificial potential field method and RRT. Ind. Eng. J. 2017, 20, 56–63. [Google Scholar]
- Kivelä, T.; Mattila, J.; Puura, J. Redundant Robotic Manipulator Path Planning for Real-Time Obstacle and Self-Collision Avoidance. In Advances in Service and Industrial Robotics; Springer: Cham, Switzerland, 2017; pp. 208–216. [Google Scholar]
- Feng, L.; Jia, J.H. Improved algorithm of RRT path planning based on comparison optimization. Comput. Eng. Appl. 2011, 47, 210–213. [Google Scholar]
- Lavalle, S.M.; Kuffner, J.J. Rapidly-Exploring Random Trees: Progress and Prospects. In Algorithmic & Computational Robotics New Directions; CRC Press: Boca Raton, FL, USA, 2000; pp. 293–308. [Google Scholar]
- Kuffner, J.J.; Lavalle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 995–1001. [Google Scholar]
- Ge, J.; Sun, F.; Liu, C. RRT-GD: An efficient rapidly-exploring random tree approach with goal directionality for redundant manipulator path planning. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Qingdao, China, 3–7 December 2017; pp. 1983–1988. [Google Scholar]
- Yang, H.J.; Li, L.J.; Gao, Z.C. Obstacle avoidance path planning of hybrid harvesting manipulator based on joint configuration space. Trans. Chin. Soc. Agric. Eng. 2017, 33, 55–62. [Google Scholar]
- Li, X.C.; Zhao, D.B.; Yi, J.Q. A dynamic path planning approach for mobile manipulators along given end effector paths. Control Decis. 2007, 22, 184–188. [Google Scholar]
- Kuwata, Y.; Teo, J.; Fiore, G. Real-time motion planning with applications to autonomous urban driving. IEEE Trans. Control Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Fraichard, T.; Scheuer, A. From Reeds and Shepp’s to continuous-curvature paths. IEEE Trans. Robot. 2004, 20, 1025–1035. [Google Scholar] [CrossRef]
- Lau, B.; Sprunk, C.; Burgard, W. Kinodynamic motion planning for mobile robots using splines. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2427–2433. [Google Scholar]
- Elbanhawi, M.; Simic, M. Continuous-Curvature Bounded Trajectory Planning Using Parametric Splines. In Proceedings of the Frontiers in Artificial Intelligence and Applications, Chania, Greece, 26–28 June 2014; pp. 513–522. [Google Scholar]
- Pan, J.; Chitta, S.; Manocha, D. FCL: A general purpose library for collision and proximity queries. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3859–3866. [Google Scholar]
- Gómez-Bravo, F.; Cuesta, F.; Ollero, A. Continuous curvature path generation based on β-spline curves for parking manoeuvres. Robot. Auton. Syst. 2008, 56, 360–372. [Google Scholar] [CrossRef]
- Koyuncu, E.; Inalhan, G. A probabilistic B-spline motion planning algorithm for unmanned helicopters flying in dense 3D environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 815–821. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 50 Times Planning Experiments | Average Planning Time/ms | Average Sampling Nodes | Successful Times |
|---|---|---|---|
| Basic-RRT | 403.5 | 752.6 | 42 |
| Bi-RRT | 186.75 | 351.8 | 50 |
| S-RRT | 79.4 | 172.3 | 50 |
| 20 Planning Experiments | Average Planning Time/ms | Average Sampling Nodes | Successful Times |
|---|---|---|---|
| Basic-RRT | 986.5 | 1203.5 | 12 |
| Bi-RRT | 523.6 | 632.5 | 16 |
| S-RRT | 242.2 | 209.4 | 20 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, K.; Ren, B. A Method on Dynamic Path Planning for Robotic Manipulator Autonomous Obstacle Avoidance Based on an Improved RRT Algorithm. Sensors 2018, 18, 571. https://doi.org/10.3390/s18020571
Wei K, Ren B. A Method on Dynamic Path Planning for Robotic Manipulator Autonomous Obstacle Avoidance Based on an Improved RRT Algorithm. Sensors. 2018; 18(2):571. https://doi.org/10.3390/s18020571
Chicago/Turabian StyleWei, Kun, and Bingyin Ren. 2018. "A Method on Dynamic Path Planning for Robotic Manipulator Autonomous Obstacle Avoidance Based on an Improved RRT Algorithm" Sensors 18, no. 2: 571. https://doi.org/10.3390/s18020571
APA StyleWei, K., & Ren, B. (2018). A Method on Dynamic Path Planning for Robotic Manipulator Autonomous Obstacle Avoidance Based on an Improved RRT Algorithm. Sensors, 18(2), 571. https://doi.org/10.3390/s18020571