Enrichment of OpenStreetMap Data Completeness with Sidewalk Geometries Using Data Mining Techniques




Abstract
1. Introduction
2. Related Studies
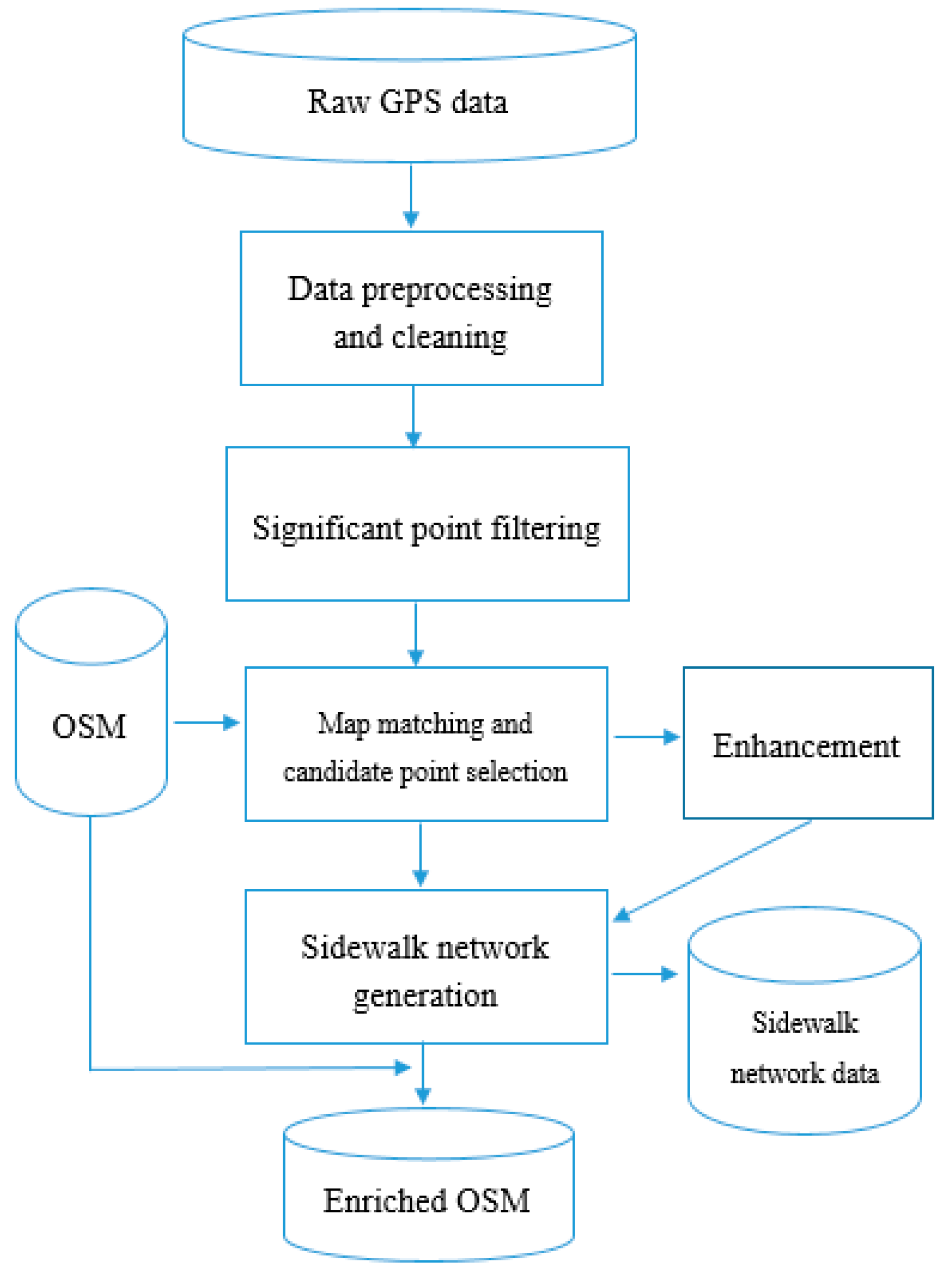
3. Methodology
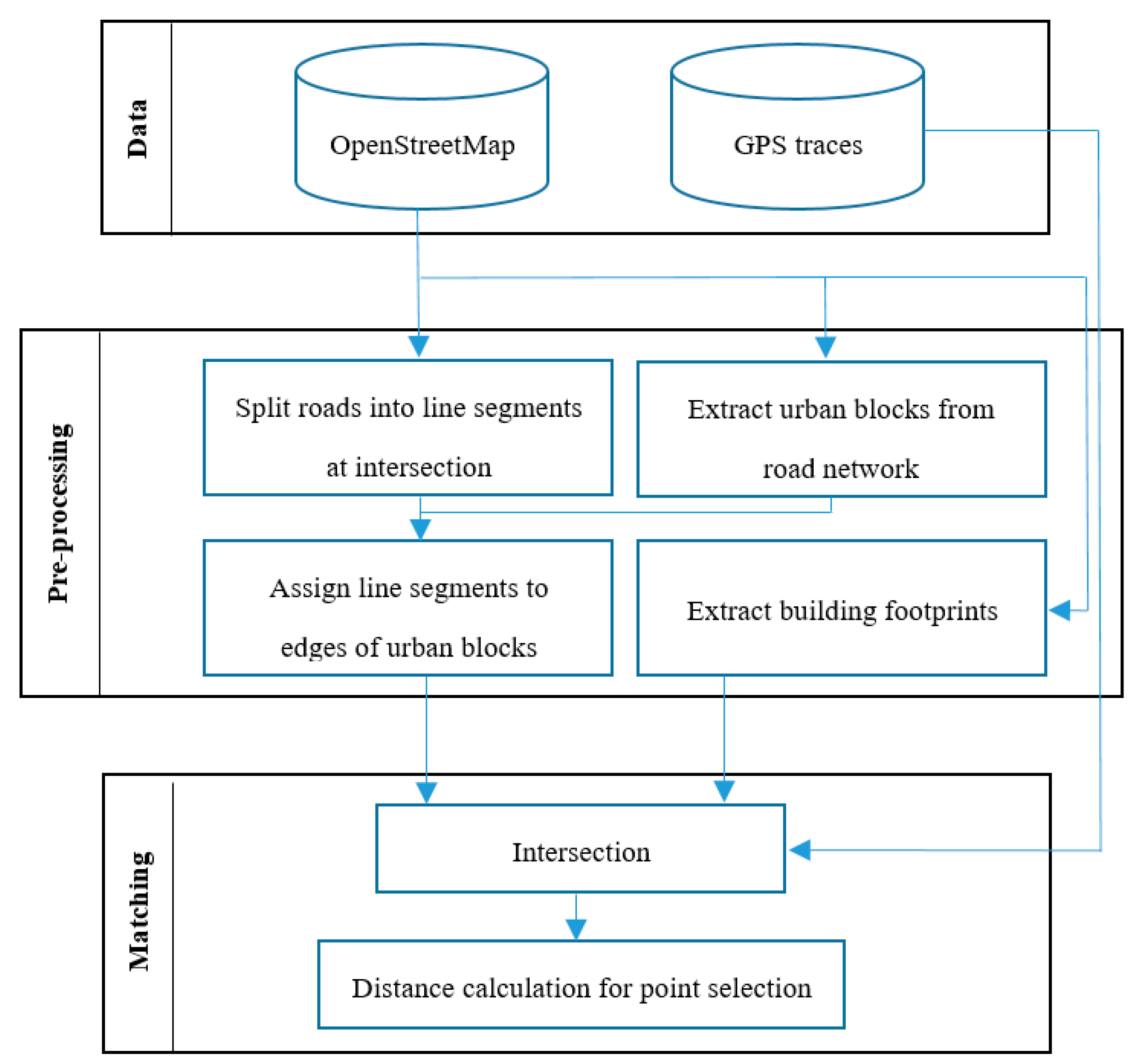
3.1. Data Preprocessing and Cleaning
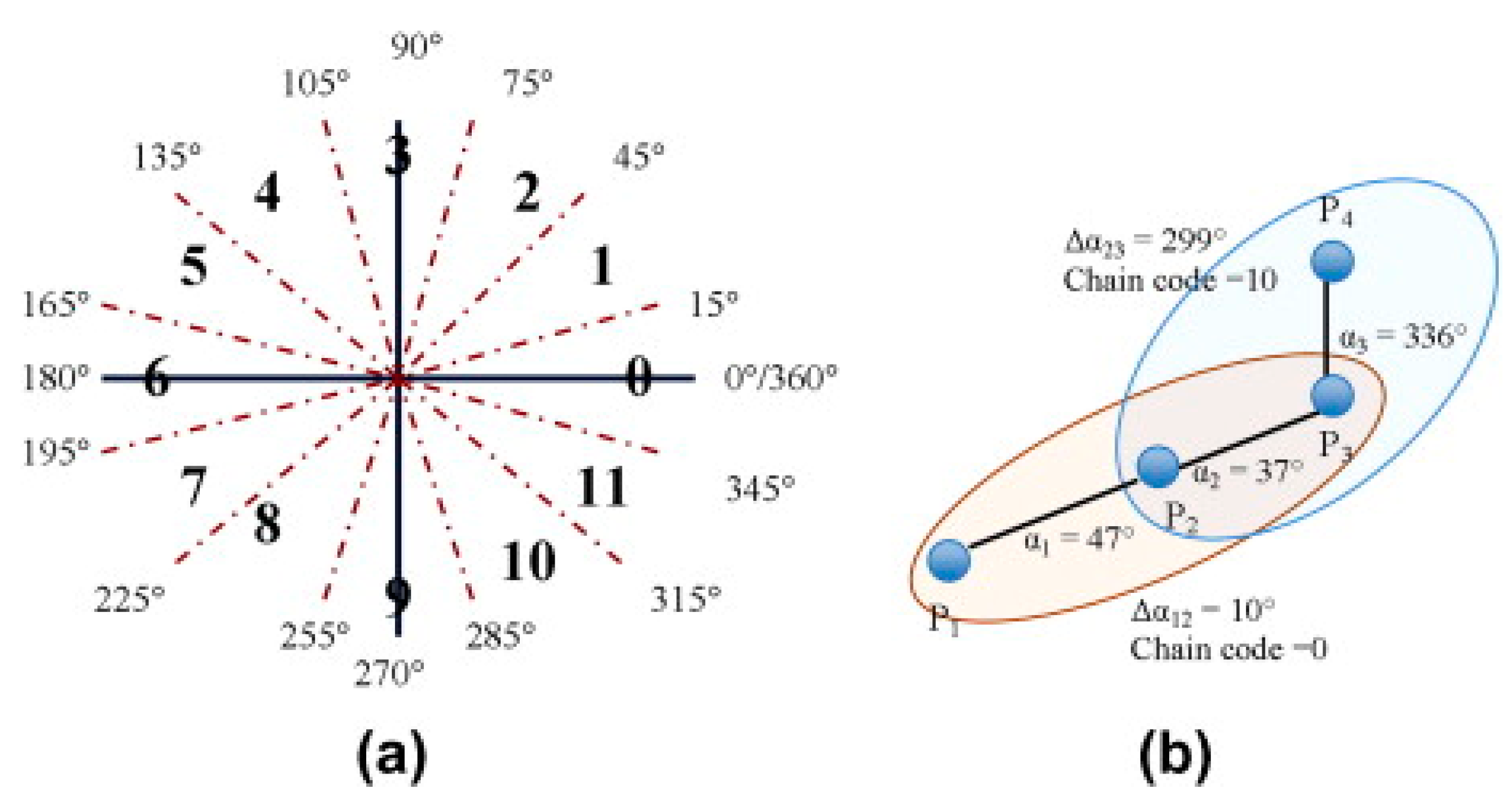
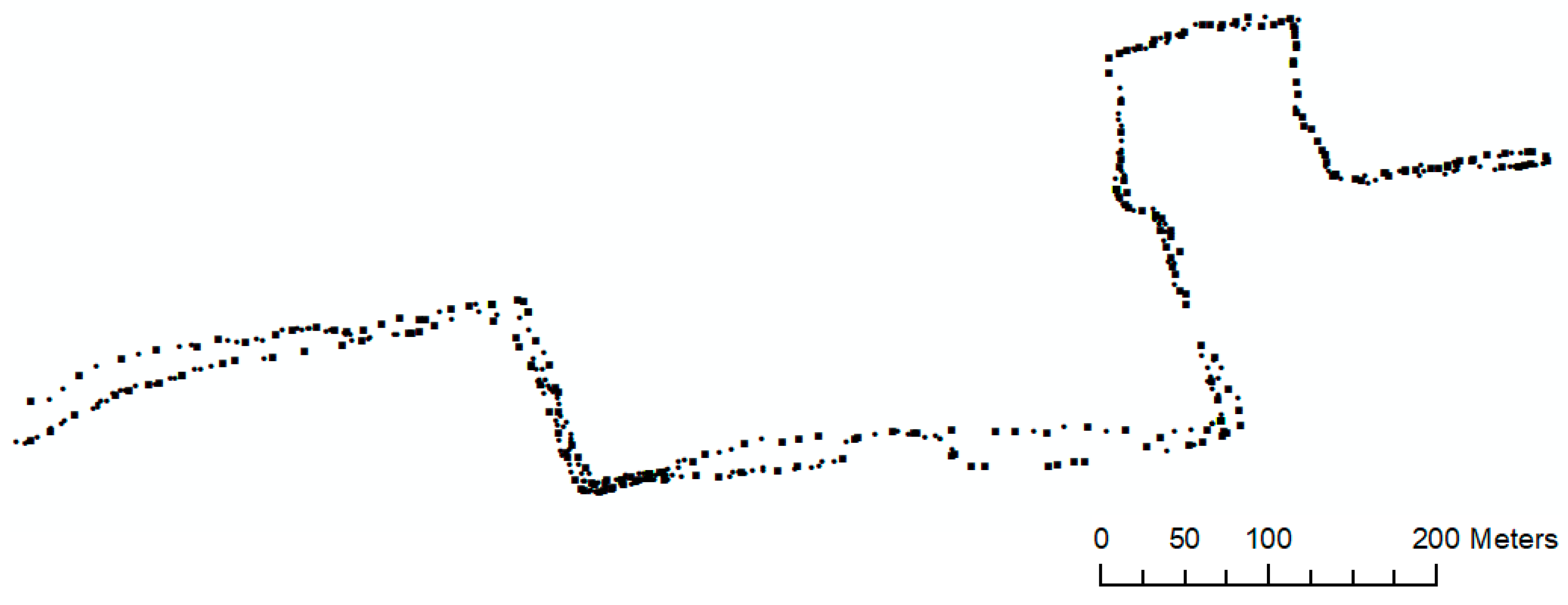
3.2. Significant Point Filtering
- (1)
- the bearing change (Δα) is calculated. The bearing of successive points in a filtered GPS trace is required to calculate the bearing change. The bearing information provided directly by the GPS receivers are not employed in this task due to lack of accuracy when traveling at speeds of less than 3.0 m/s [56]. Instead, we adopt the great circle navigation formula [57] for calculating the absolute value obtained from subtracting successive bearings (Δα).
- (2)
- Each GPS point now contains the bearing between two successive points and the bearing change (Δα). Since the bearing change could have a value between 0 to 360 degrees, setting a threshold for selecting the candidate significant point based on the bearing change would be difficult. For instance, there might be a situation where the differences between the values of the two numbers is very high but the change in direction is not. Therefore, an algorithm for recognizing shapes of objects is necessary to be used. In our approach, we employ the chain coding technique, since it has been proven to work well for detecting sidewalk geometries [45]. For detailed information on this technique, please refer to [58].
3.3. Map Matching and Candidate Point Selection
- Calculate the distance of each GPS significant point with the nearest road line segment, and/or nearest building segment (this means that firstly we select a road or building object and then calculate the distance of it to all significant points and repeat it for all road or building objects in the area that traces overlap with). Then, we group those significant points that seem to have the similar distance to a road or building (this shows that the group of significant points belong to a path near either the road or the building). Hence, clusters for all the significant points are created. All the significant points need to be in at least one cluster in the end. This task is repeated until the clustering of all the points are processed.
- For each cluster, the algorithm checks the value of the distance of points to nearest road/building, and selects three points from each cluster. Two of the points belong to the head and tail of the cluster (geographically located start and end points). The third point is the representative point of the cluster; hence, it is the point that has the closest distance to the correspondence road or building object. This step is repeated for all the clusters.
3.4. Enhancement
3.5. Sidewalk Network Construction, and OSM Data Enrichment
4. Experiment and Results
4.1. Study Area
4.2. Sidewalk Geometry Construction
4.2.1. Preprocessing Step
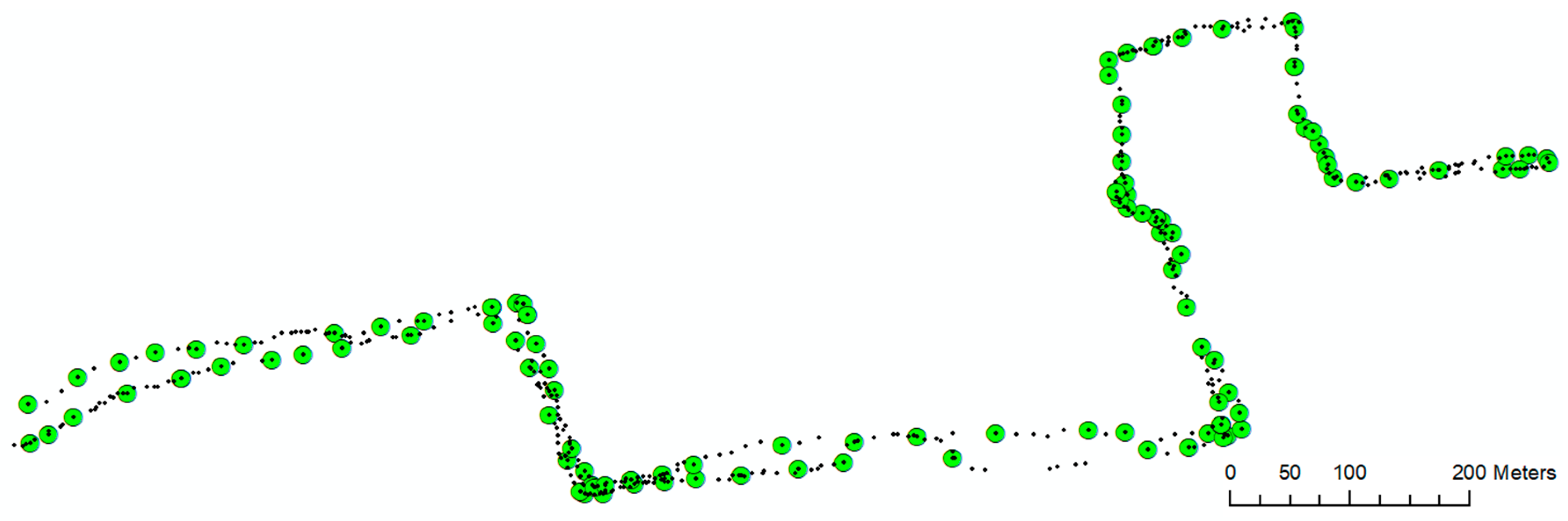
4.2.2. Data Clustering and Candidate Point Selection
4.2.3. Map Matching and Significant Point Selection
4.2.4. Enhancement
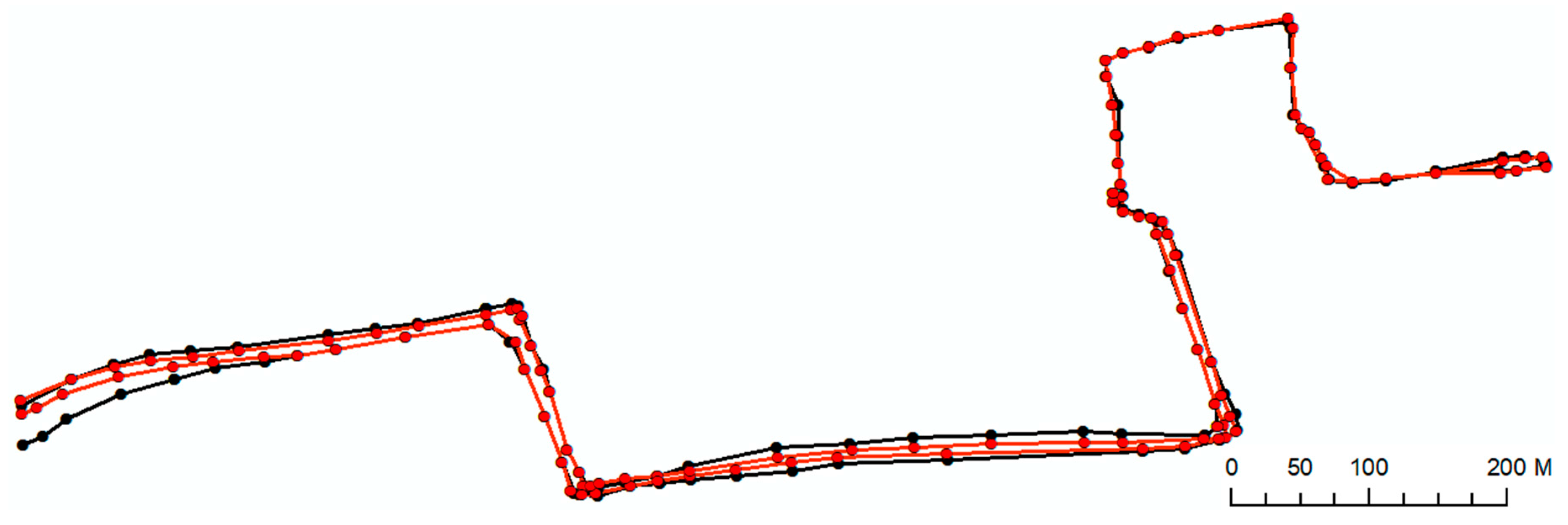
4.2.5. Sidewalk Network Construction
4.3. Evaluation
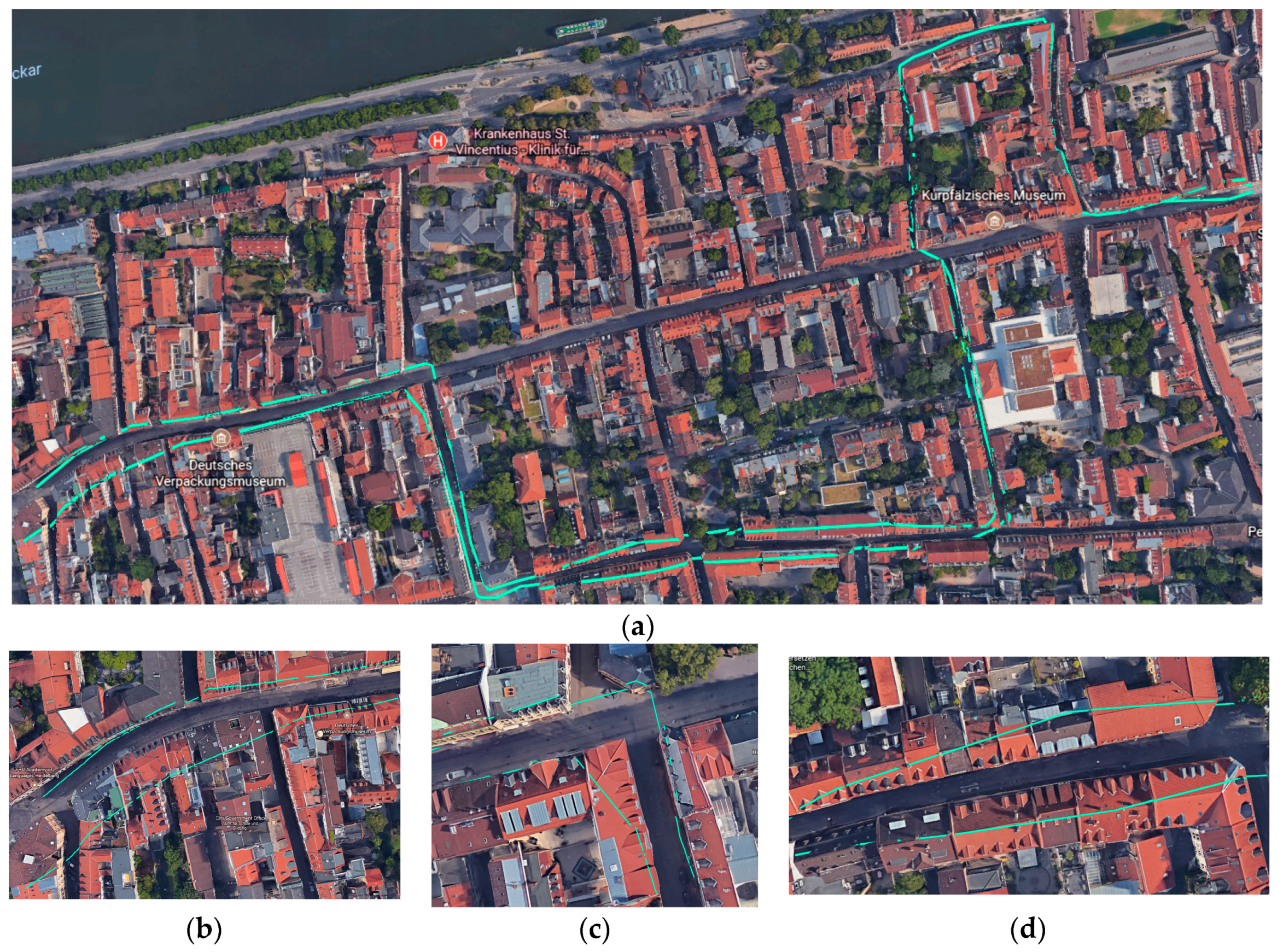
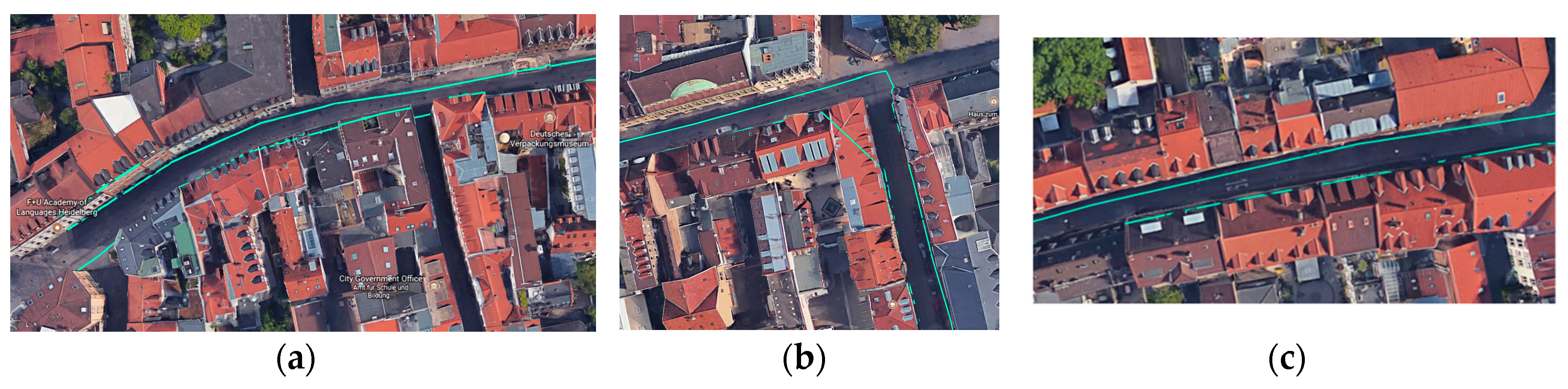
4.3.1. Visual Inspection with Google Maps
4.3.2. Comparison with Sidewalk Reference Data
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Haklay, M.; Weber, P. Openstreetmap: User-generated street maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- See, L.; Mooney, P.; Foody, G.; Bastin, L.; Comber, A.; Estima, J.; Liu, H.Y. Crowdsourcing, citizen science or volunteered geographic information? The current state of crowdsourced geographic information. ISPRS Int. J. Geo Inf. 2016, 5, 55. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Li, L. Assuring the quality of volunteered geographic information. Spat. Stat. 2012, 1, 110–120. [Google Scholar] [CrossRef]
- Senaratne, H.; Mobasheri, A.; Ali, A.L.; Capineri, C.; Haklay, M. A review of volunteered geographic information quality assessment methods. Int. J. Geogr. Inf. Sci. 2017, 31, 139–167. [Google Scholar] [CrossRef]
- Girres, J.F.; Touya, G. Quality assessment of the French OpenStreetMap dataset. Trans. GIS 2010, 14, 435–459. [Google Scholar] [CrossRef]
- Haklay, M. How good is volunteered geographical information? A comparative study of OpenStreetMap and Ordnance Survey datasets. Environ. Plan. B Plan. Des. 2010, 37, 682–703. [Google Scholar] [CrossRef]
- Fan, H.; Zipf, A.; Fu, Q.; Neis, P. Quality assessment for building footprints data on OpenStreetMap. Int. J. Geogr. Inf. Sci. 2014, 28, 700–719. [Google Scholar] [CrossRef]
- Ludwig, I.; Voss, A.; Krause-Traudes, M. A Comparison of the Street Networks of Navteq and OSM in Germany. In Advancing Geoinformation Science for a Changing World; Springer: Berlin/Heidelberg, Germany, 2011; pp. 65–84. [Google Scholar]
- Koukoletsos, T.; Haklay, M.; Ellul, C. Assessing data completeness of VGI through an automated matching procedure for linear data. Trans. GIS 2012, 16, 477–498. [Google Scholar] [CrossRef]
- Zielstra, D.; Zipf, A. A comparative study of proprietary geodata and volunteered geographic information for Germany. In Proceedings of the 13th AGILE International Conference on Geographic Information Science, Guimarães, Portugal, 11–14 May 2010. [Google Scholar]
- Neis, P. Measuring the Reliability of Wheelchair User Route Planning based on Volunteered Geographic Information. Trans. GIS 2015, 19, 188–201. [Google Scholar] [CrossRef]
- Mobasheri, A.; Sun, Y.; Loos, L.; Ali, A.L. Are Crowdsourced Datasets Suitable for Specialized Routing Services? Case Study of OpenStreetMap for Routing of People with Limited Mobility. Sustainability 2017, 9, 997. [Google Scholar] [CrossRef]
- Dorn, H.; Törnros, T.; Zipf, A. Quality evaluation of VGI using authoritative data—A comparison with land use data in Southern Germany. ISPRS Int. J. Geo Inf. 2015, 4, 1657–1671. [Google Scholar] [CrossRef]
- Kulyukin, V.A.; Nicholson, J.; Ross, D.A.; Marston, J.R.; Gaunet, F. The Blind Leading the Blind: Toward Collaborative Online Route Information Management by Individuals with Visual Impairments. In Proceedings of the AAAI Spring Symposium: Social Information Processing, Stanford, CA, USA, 26–28 March 2008; pp. 54–59. [Google Scholar]
- Graser, A.; Straub, M.; Dragaschnig, M. Is OSM good enough for vehicle routing? A study comparing street networks in Vienna. In Progress in Location-Based Services 2014; Springer International Publishing: Cham, Switzerland, 2015; pp. 3–17. [Google Scholar]
- Bakillah, M.; Mobasheri, A.; Liang, S.H.; Zipf, A. Towards an efficient routing web processing service through capturing real-time road conditions from big data. In Proceedings of the 2013 5th Computer Science and Electronic Engineering Conference (CEEC), Colchester, UK, 17–18 September 2013; pp. 152–155. [Google Scholar]
- Rousell, A.; Hahmann, S.; Bakillah, M.; Mobasheri, A. Extraction of landmarks from OpenStreetMap for use in navigational instructions. In Proceedings of the AGILE Conference on Geographic Information Science, Lisbon, Portugal, 9–12 June 2015; pp. 9–12. [Google Scholar]
- Sun, Y.; Fan, H.; Bakillah, M.; Zipf, A. Road-based travel recommendation using geo-tagged images. Comput. Environ. Urban Syst. 2015, 53, 110–122. [Google Scholar] [CrossRef]
- Qin, H.; Rice, R.M.; Fuhrmann, S.; Rice, M.T.; Curtin, K.M.; Ong, E. Geocrowdsourcing and accessibility for dynamic environments. GeoJournal 2016, 81, 699–716. [Google Scholar] [CrossRef]
- Rice, M.T.; Paez, F.I.; Rice, R.M.; Ong, E.W.; Qin, H.; Seitz, C.R.; Fayne, J.V.; Curtin, K.M.; Fuhrmann, S.; Pfoser, D.; et al. Quality Assessment and Accessibility Applications of Crowdsourced Geospatial Data: A Report on the Development and Extension of the George Mason University (GMU) Geocrowdsourcing Testbed. Available online: http://www.dtic.mil/dtic/tr/fulltext/u2/a615952.pdf (accessed on 1 February 2018).
- Ismail, K.; Sayed, T.; Saunier, N. Automated collection of pedestrian data using computer vision techniques. In Proceedings of the Transportation Research Board Annual Meeting Compendium of Papers, Washington, DC, USA, 11–15 January 2009. [Google Scholar]
- Beni, L.H.; McArdle, S.; Khayer, Y. An Integrated Method for Mapping Impervious and Pervious Areas in Urban Environments Using Hyperspectral and LiDAR Data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 87–91. [Google Scholar] [CrossRef]
- Gaisbauer, C.; Frank, A.U. Wayfinding model for pedestrian navigation. In Proceedings of the AGILE 2008 Conference-Taking Geo-information Science One Step Further, University of Girona, Girona, Spain, 5–8 May 2008; Volume 9. [Google Scholar]
- Elias, B. Pedestrian Navigation-Creating a tailored geodatabase for routing. In Proceedings of the 2007 4th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 22–22 March 2007; pp. 41–47. [Google Scholar]
- Holone, H.; Misund, G.; Holmstedt, H. Users are doing it for themselves: Pedestrian navigation with user generated content. In Proceedings of the 2007 International Conference on Next Generation Mobile Applications, Services and Technologies (NGMAST 2007), Cardiff, UK, 12–14 September 2007; pp. 91–99. [Google Scholar]
- Corona, B.; Winter, S. Datasets for Pedestrian Navigation Services; Angewandte Geographische Informationsverarbeitung XIII; Herbert Wichmann Verlag: Heidelberg, Germany, 2001; pp. 84–89. [Google Scholar]
- Kasemsuppakorn, P.; Karimi, H.A. Personalised routing for wheelchair navigation. J. Locat. Based Serv. 2009, 3, 24–54. [Google Scholar] [CrossRef]
- Laakso, M.; Sarjakoski, T.; Sarjakoski, L.T. Improving accessibility information in pedestrian maps and databases. Cartographica 2011, 46, 101–108. [Google Scholar] [CrossRef]
- Laakso, M.; Sarjakoski, T.; Lehto, L.; Sarjakoski, L.T. An information model for pedestrian routing and navigation databases supporting universal accessibility. Cartographica 2013, 48, 89–99. [Google Scholar] [CrossRef]
- Beale, L.; Field, K.; Briggs, D.; Picton, P.; Matthews, H. Mapping for wheelchair users: Route navigation in urban spaces. Cartogr. J. 2006, 43, 68–81. [Google Scholar] [CrossRef]
- Karimi, H.A.; Zhang, L.; Benner, J.G. Personalized accessibility map (PAM): A novel assisted wayfinding approach for people with disabilities. Ann. GIS 2014, 20, 99–108. [Google Scholar] [CrossRef]
- Rouse, L.J.; Bergeron, S.J.; Harris, T.M. Participating in the geospatial web: Collaborative mapping, social networks and participatory GIS. In The Geospatial Web; Springer: London, UK, 2009; pp. 153–158. [Google Scholar]
- Zheng, Y.; Li, Q.; Chen, Y.; Xie, X.; Ma, W.Y. Understanding mobility based on GPS data. In Proceedings of the 10th International Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; pp. 312–321. [Google Scholar]
- Araki, M.; Kanamori, R.; Gong, L.; Morikawa, T. Impacts of Seasonal Factors on Travel Behavior: Basic Analysis of GPS Trajectory Data for 8 Months. In Serviceology for Smart Service System; Springer: Tokyo, Japan, 2017; pp. 377–384. [Google Scholar]
- Zhu, X.; Li, J.; Liu, Z.; Yang, F. Learning Transportation Mode Choice for Context-Aware Services with Directed-Graph-Guided Fused Lasso from GPS Trajectory Data. In Proceedings of the 2017 IEEE International Conference on Web Services (ICWS), Honolulu, HI, USA, 25–30 June 2017; pp. 692–699. [Google Scholar]
- Martin, B.D.; Addona, V.; Wolfson, J.; Adomavicius, G.; Fan, Y. Methods for real-time prediction of the mode of travel using smartphone-based GPS and accelerometer data. Sensors 2017, 17, 2058. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; McArthur, D.P. Linking Smartphone GPS Data with Transport Planning: A Framework of Data Aggregation and Anonymization for a Journey Planning App. In Proceedings of the GISRUK 2017, Manchester, UK, 18–21 April 2017. [Google Scholar]
- Wergin, J.; Buehler, R. Where Do Bikeshare Bikes Actually Go? Analysis of Capital Bikeshare Trips Using GPS Data (No. 17-01167). Transp. Res. Rec. 2017, 2662. [Google Scholar] [CrossRef]
- Sun, Y.; Mobasheri, A.; Hu, X.; Wang, W. Investigating impacts of environmental factors on the cycling behavior of bicycle-sharing users. Sustainability 2017, 9, 1060. [Google Scholar] [CrossRef]
- Guo, T.; Iwamura, K.; Koga, M. Towards high accuracy road maps generation from massive GPS traces data. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 667–670. [Google Scholar]
- Sachdeva, A. Collective Enrichment of OpenStreetMap Spatial Data through Vehicles Equipped with Driver Assistance Systems. Master’s Thesis, Technische Universität Chemnitz, Chemnitz, Germany, 2015. [Google Scholar]
- Van Winden, K.; Biljecki, F.; Van der Spek, S. Automatic update of road attributes by mining GPS tracks. Trans. GIS 2016, 20, 664–683. [Google Scholar] [CrossRef]
- Kim, S.; Choi, J.; Kim, Y. Determining the sidewalk pavement width by using pedestrian discomfort levels and movement characteristics. KSCE J. Civ. Eng. 2011, 15, 883–889. [Google Scholar] [CrossRef]
- Kasemsuppakorn, P.; Karimi, H.A. Pedestrian Path Generation through GPS Traces. In Advanced Location-Based Technologies and Services; Taylor & Francis: Abingdon, UK, 2013; pp. 165–185. [Google Scholar]
- Kasemsuppakorn, P.; Karimi, H.A. A pedestrian network construction algorithm based on multiple GPS traces. Transp. Res. Part C Emerg. Technol. 2013, 26, 285–300. [Google Scholar] [CrossRef]
- Lu, Y.; Karimi, H.A. Real-Time Sidewalk Slope Calculation through Integration of GPS Trajectory and Image Data to Assist People with Disabilities in Navigation. ISPRS Int. J. Geo Inf. 2015, 4, 741–753. [Google Scholar] [CrossRef]
- Frackelton, A.; Guensler, R. Pedestrian Project Prioritization Incorporating App-Collected Sidewalk Data. In Proceedings of the 94th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Zipf, A.; Mobasheri, A.; Rousell, A.; Hahmann, S. Crowdsourcing for individual needs—The case of routing and navigation for mobility-impaired persons. In European Handbook of Crowdsourced Geographic Information; Ubiquity Press: London, UK, 2016. [Google Scholar]
- Mirri, S.; Prandi, C.; Salomoni, P.; Callegati, F.; Campi, A. On combining crowdsourcing, sensing and open data for an accessible smart city. In Proceedings of the 2014 Eighth International Conference on Next Generation Mobile Apps, Services and Technologies, Oxford, UK, 10–12 September 2014; pp. 294–299. [Google Scholar]
- Prandi, F.; Soave, M.; Devigili, F.; De Amicis, R.; Astyakopoulos, A. Collaboratively collected geodata to support routing service for disabled people. In Proceedings of the 11th International Symposium on Location-Based Services, Vienna, Austria, 26–28 November 2014. [Google Scholar]
- Bakillah, M.; Mobasheri, A.; Rousell, A.; Hahmann, S.; Jokar, J.; Liang, S.H. Toward a collective tagging Android application for gathering accessibility-related geospatial data in European cities. In Proceedings of the AGILE Conference on Geographic Information Science, Lisbon, Portugal, 9–12 June 2015. [Google Scholar]
- Mobasheri, A.; Deister, J.; Dieterich, H. Wheelmap: The wheelchair accessibility crowdsourcing platform. Open Geospatial Data Softw. Stand. 2017, 2, 27. [Google Scholar] [CrossRef]
- Rice, M.T.; Jacobson, R.D.; Caldwell, D.R.; McDermott, S.D.; Paez, F.I.; Aburizaiza, A.O.; Qin, H. Crowdsourcing techniques for augmenting traditional accessibility maps with transitory obstacle information. Cartogr. Geogr. Inf. Sci. 2013, 40, 210–219. [Google Scholar] [CrossRef]
- Rice, M.T.; Curtin, K.M.; Paez, F.I.; Seitz, C.R.; Qin, H. Crowdsourcing to Support Navigation for the Disabled: A Report on the Motivations, Design, Creation and Assessment of a Testbed Environment for Accessibility (No. AA10-4733). GEORGE MASON UNIV FAIRFAX VA, 2013. Available online: http://www.dtic.mil/docs/citations/ADA588474 (accessed on 1 February 2018).
- Rice, M.T.; Hammill, W.C.; Aburizaiza, A.O.; Schwarz, S.; Jacobson, R.D. Integrating user-contributed geospatial data with assistive geotechnology using a localized gazetteer. Adv. Cartogr. GISci. 2011, 1, 279–291. [Google Scholar]
- Ochieng, W.Y.; Quddus, M.; Noland, R.B. Map-matching in complex urban road networks. Rev. Bras. Cartografia 2003, 55, 1–14. [Google Scholar]
- Williams, E. Aviation Formulary V1.45. 2010. Available online: http://williams.best.vwh.net/avform.htm (accessed on 11 August 2017).
- Freeman, H. Computer processing of line-drawing images. ACM Comput. Surv. 1974, 6, 57–97. [Google Scholar] [CrossRef]
- Fan, H.; Yang, B.; Zipf, A.; Rousell, A. A polygon-based approach for matching OpenStreetMap road networks with regional transit authority data. Int. J. Geogr. Inf. Sci. 2016, 30, 748–764. [Google Scholar] [CrossRef]
- Chrisman, N.R. The error component in spatial data. Geogr. Inf. Syst. 1991, 1, 165–174. [Google Scholar]
- Canavosio-Zuzelski, R.; Agouris, P.; Doucette, P. A photogrammetric approach for assessing positional accuracy of OpenStreetMap© roads. ISPRS Int. J. Geo Inf. 2013, 2, 276–301. [Google Scholar] [CrossRef]
- Stanislawski, L.V.; Dewitt, B.A.; Shrestha, R.L. Estimating positional accuracy of data layers within a GIS through error propagation. Photogramm. Eng. Remote Sens. 1996, 62, 429–433. [Google Scholar]
- Mobasheri, A. A rule-based spatial reasoning approach for OpenStreetMap data quality enrichment; case study of routing and navigation. Sensors 2017, 17, 2498. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Experiment Results | Enhanced Results | ||
|---|---|---|---|
| Total Length Ratio | RMSE (m) | Total Length Ratio | RMSE (m) |
| 0.94 | 3.2 | 0.96 | 0.93 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mobasheri, A.; Huang, H.; Degrossi, L.C.; Zipf, A. Enrichment of OpenStreetMap Data Completeness with Sidewalk Geometries Using Data Mining Techniques. Sensors 2018, 18, 509. https://doi.org/10.3390/s18020509
Mobasheri A, Huang H, Degrossi LC, Zipf A. Enrichment of OpenStreetMap Data Completeness with Sidewalk Geometries Using Data Mining Techniques. Sensors. 2018; 18(2):509. https://doi.org/10.3390/s18020509
Chicago/Turabian StyleMobasheri, Amin, Haosheng Huang, Lívia Castro Degrossi, and Alexander Zipf. 2018. "Enrichment of OpenStreetMap Data Completeness with Sidewalk Geometries Using Data Mining Techniques" Sensors 18, no. 2: 509. https://doi.org/10.3390/s18020509
APA StyleMobasheri, A., Huang, H., Degrossi, L. C., & Zipf, A. (2018). Enrichment of OpenStreetMap Data Completeness with Sidewalk Geometries Using Data Mining Techniques. Sensors, 18(2), 509. https://doi.org/10.3390/s18020509