On-Demand LoRa: Asynchronous TDMA for Energy Efficient and Low Latency Communication in IoT



Abstract
:1. Introduction
1.1. Challenges
1.2. Approach
- Energy efficient: during periods of inactivity, i.e., when there are no data to be transmitted, the end devices must reside in a deep sleep state to maximize device and overall network lifetime.
- Responsive: data must be delivered to the gateway and vice versa in both a timely and reliable manner.
- (a)
- a new network architecture leveraging short- and long-range technologies for enabling low-latency and energy efficient data collection over a two-hop network.
- (b)
- the design and implementation of a new receiver-initiated on-demand TDMA MAC for managing channel access and packet collisions. The proposed MAC offers two modalities for node triggering and allows slot allocation for combating packet collisions. On-demand TDMA achieves an improvement of at least 1.72× in terms of latency and an extended node lifetime of 1.4× with 100% system reliability over the traditional channel sensing scheme for LoRa. This new feature still works with the standard LoRa, but improves overall performance with an on-demand TDMA scheme.
- (c)
- introduce an analytical model to quantify the data collection latency for on-demand TDMA in broadcast and unicast mode.
- (d)
- the performance evaluation of the proposed network architecture and MAC using an indoor testbed composed of 11 sensor nodes.
2. Background
2.1. Low-Power Long-Range Communication: LoRa
2.2. Wake-Up Radios
3. Related Work
3.1. Long-Range Communication Schemes
3.2. Wake-Up Radio-Enabled MAC
4. Energy-Efficient Data Communication Network and Protocol
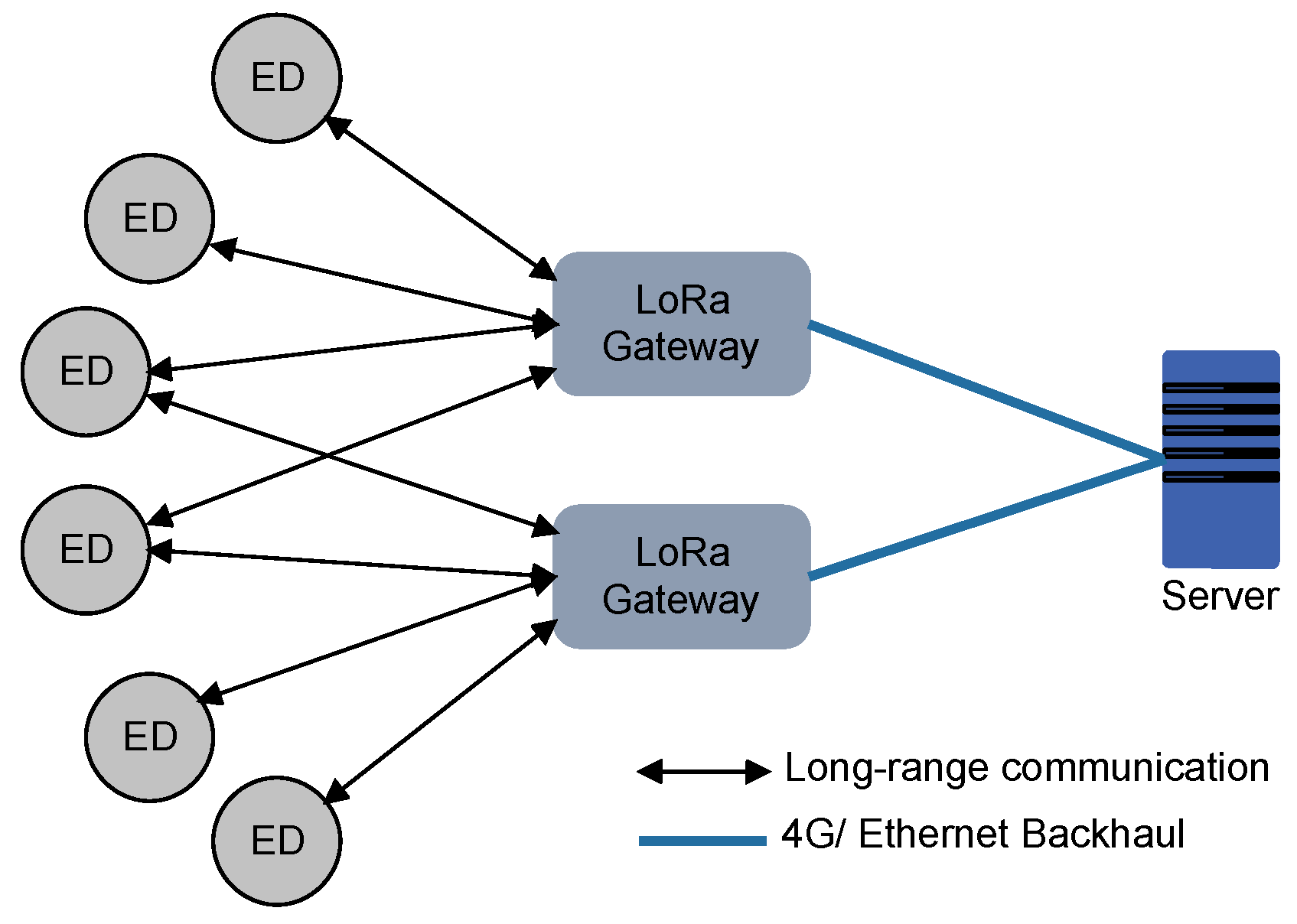
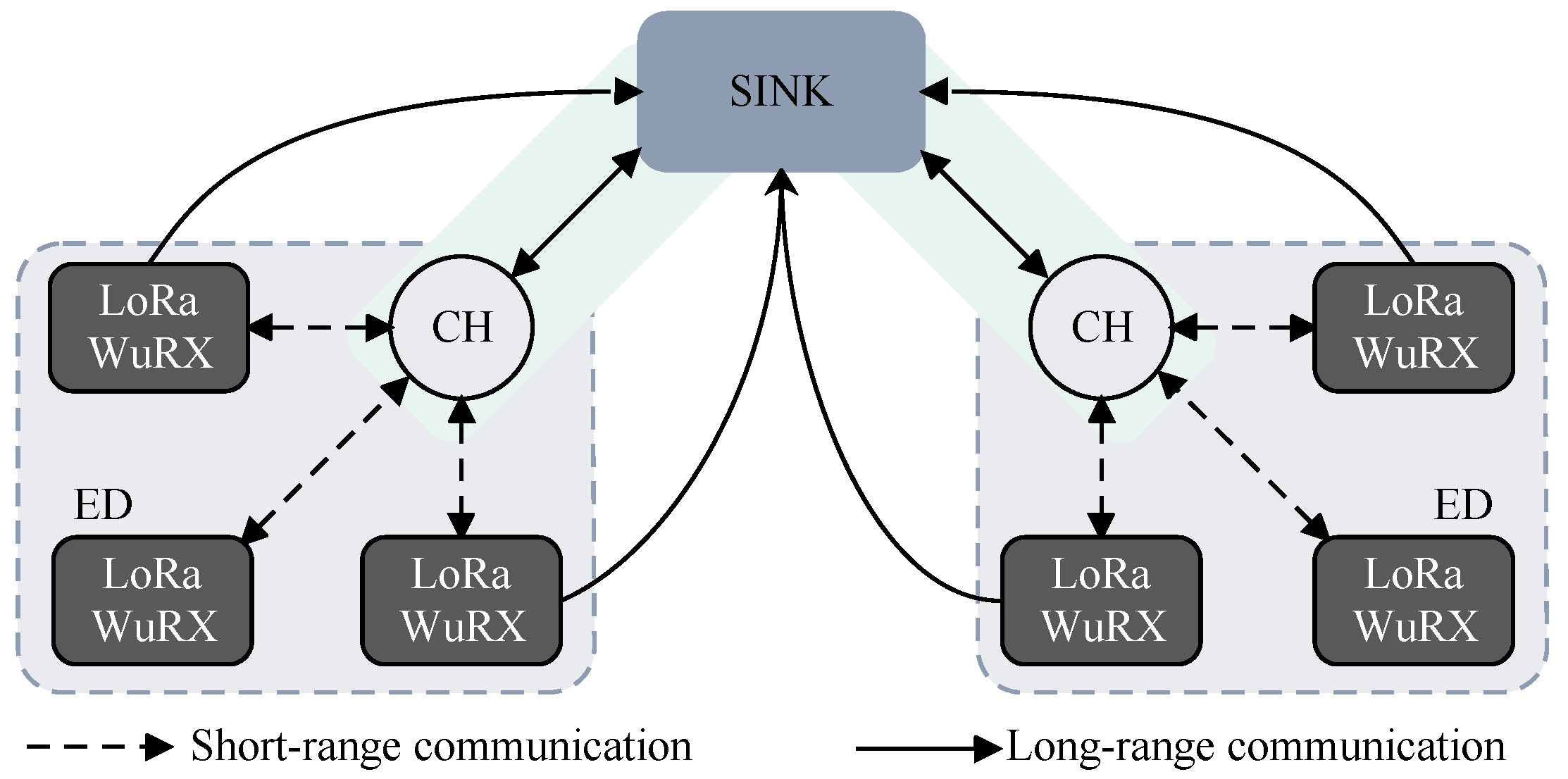
4.1. Network Architecture
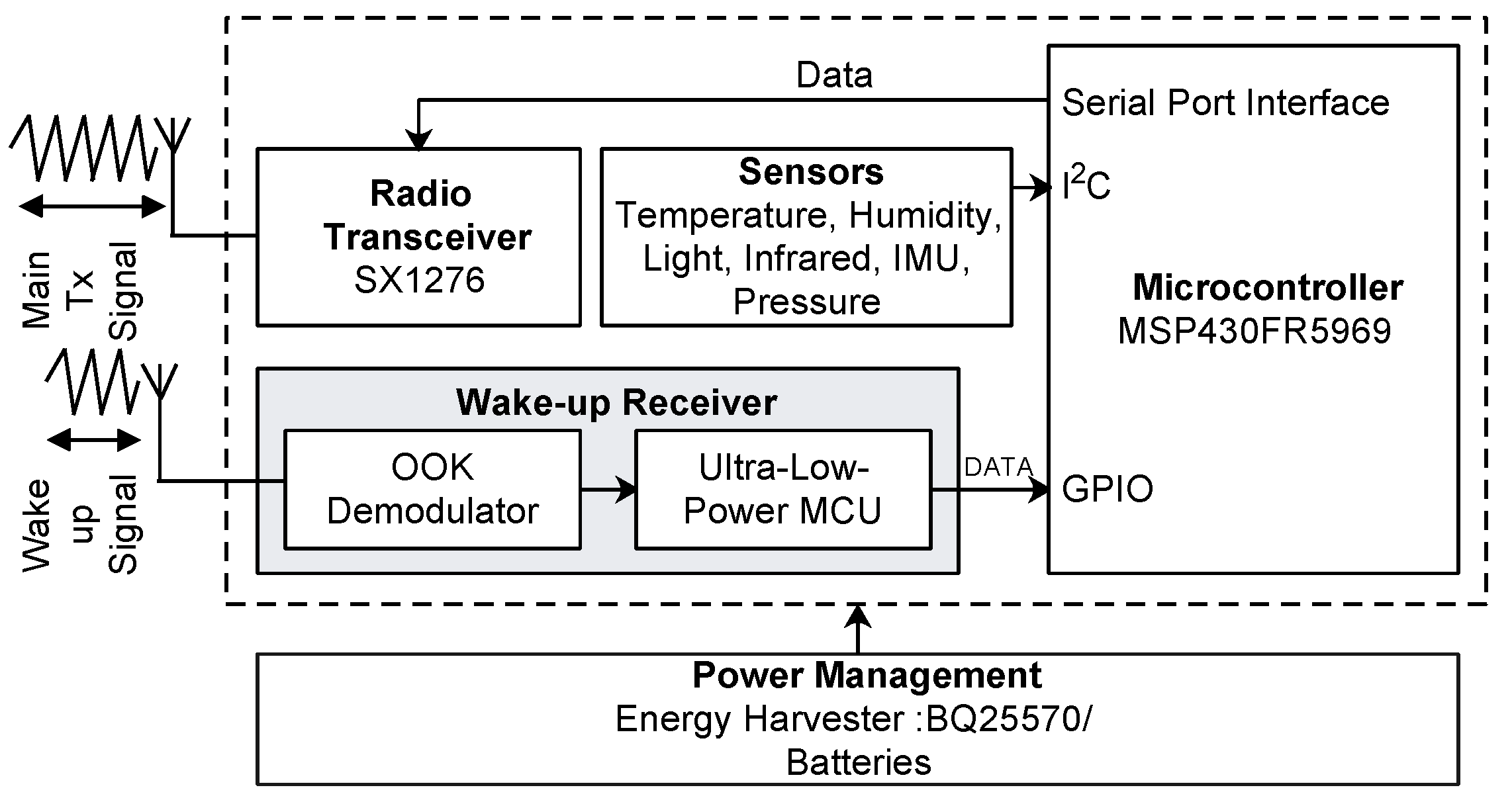
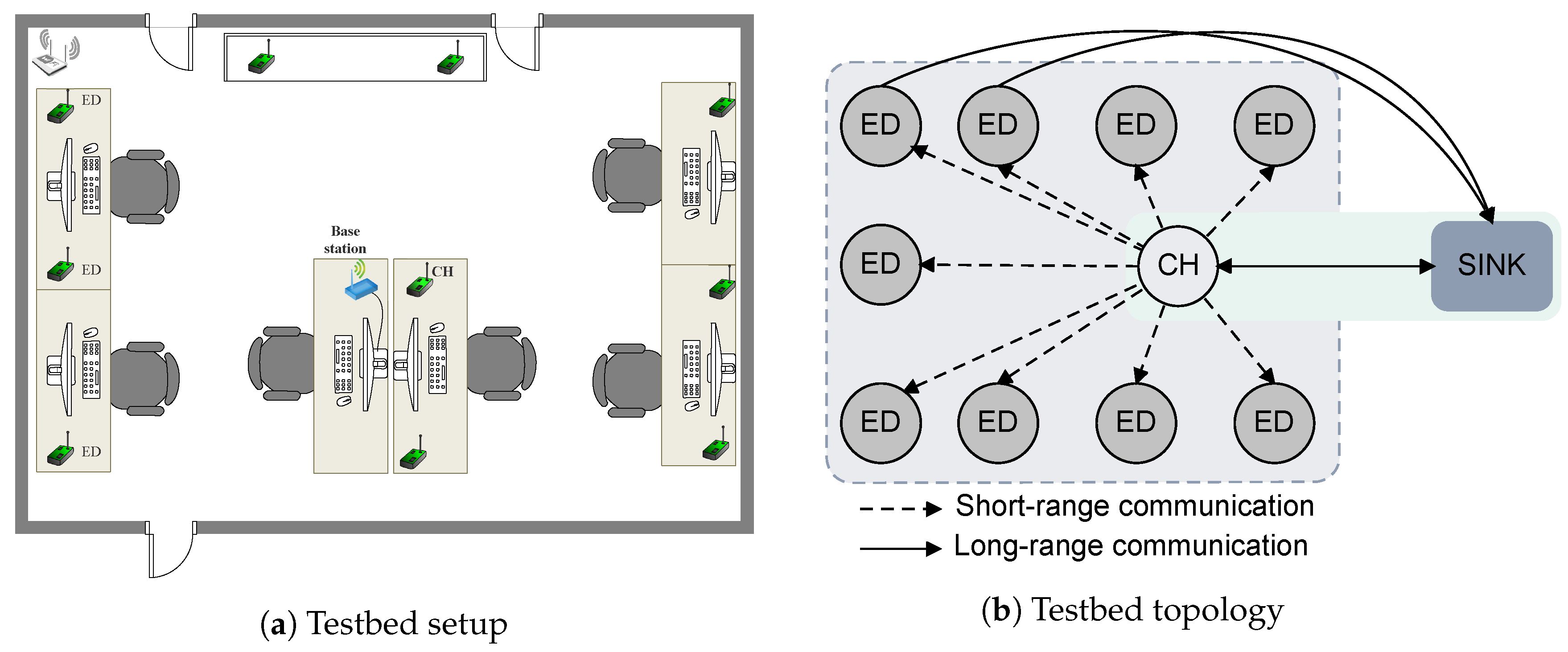
- The end device (ED) is responsible for sensing and equipped with both a wake-up receiver and a LoRa transceiver. The EDs are battery powered and, therefore, will spend most of the time in a low-power mode, i.e., deep sleep state.
- The cluster head (CH) is in charge of managing the nodes in the cluster and relaying commands from the gateway to the EDs. Depending on the application scenario and the energy availability, the CH can either operate in a duty cycle mode or can always be listening. The nodes designated as CHs are also equipped with both radios. Each CH is assigned a unique ID address allowing the sink to query each CH at a time, thus reducing the interference from other clusters.
- The sink acts as a gateway and is assumed to have no energy constraints and will be wall-powered. Therefore, the sink can be always on and listening for any incoming data. Unlike ED and CH, the sink only offers long-range communication without the wake-up radio interface.
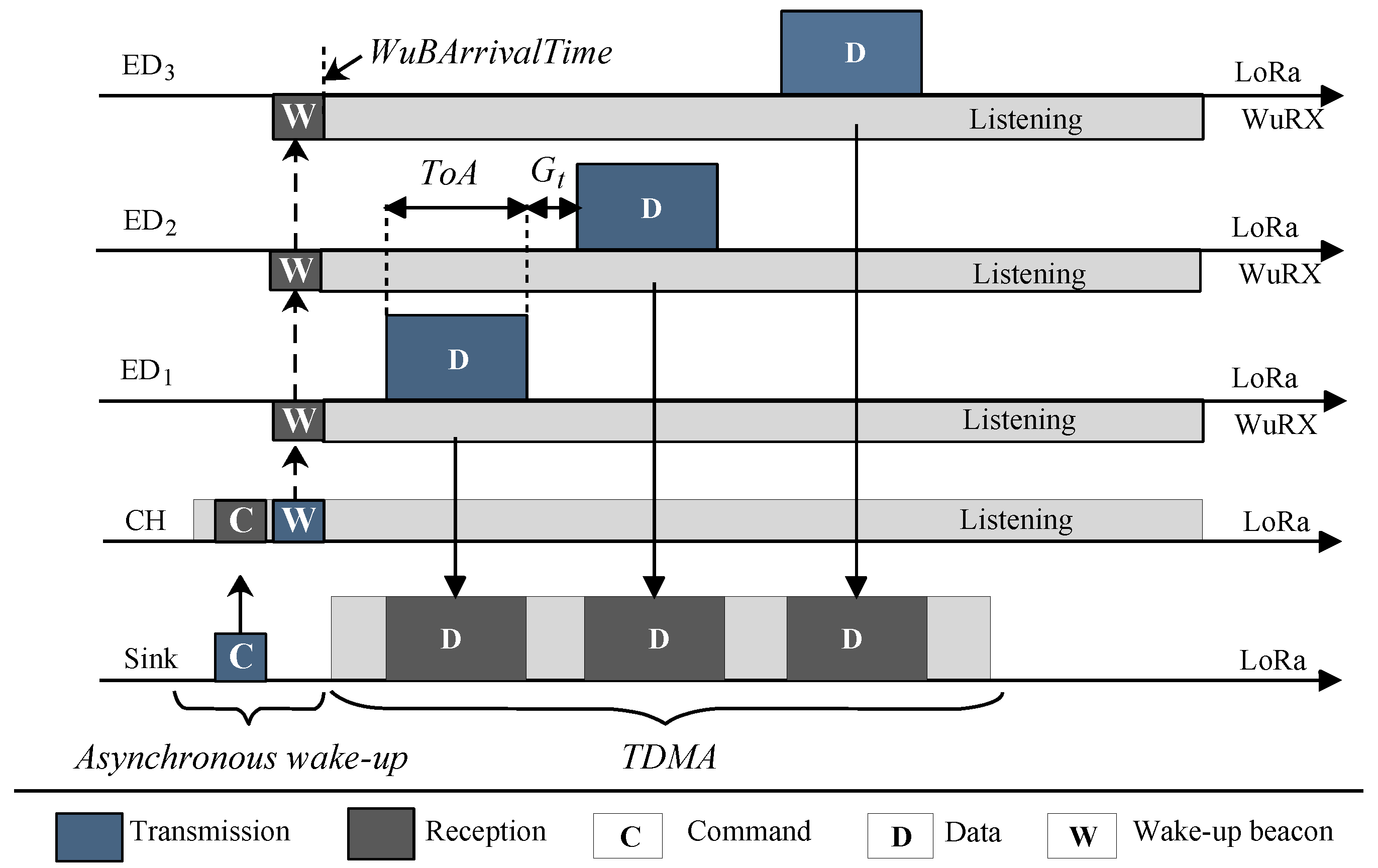
4.2. On-Demand TDMA MAC Design
4.2.1. Unicast TDMA
4.2.2. Broadcast TDMA
4.2.3. Slot Allocation
5. Experimental Evaluation
5.1. Experimental Setup
5.1.1. Testbed
5.1.2. Radio Settings
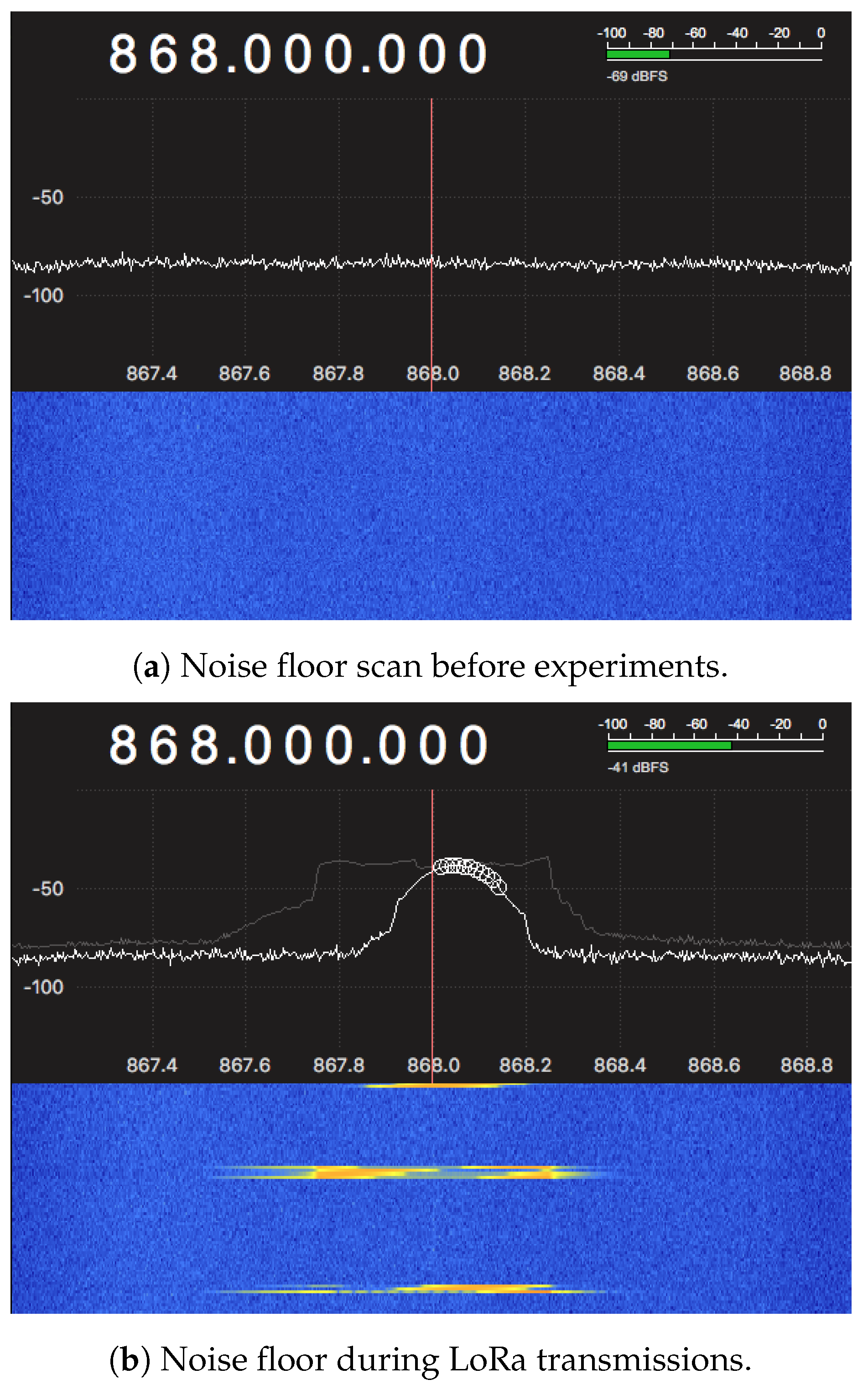
5.1.3. Ambient Noise Floor
5.2. Evaluation Metrics
5.3. Network Performance Analysis
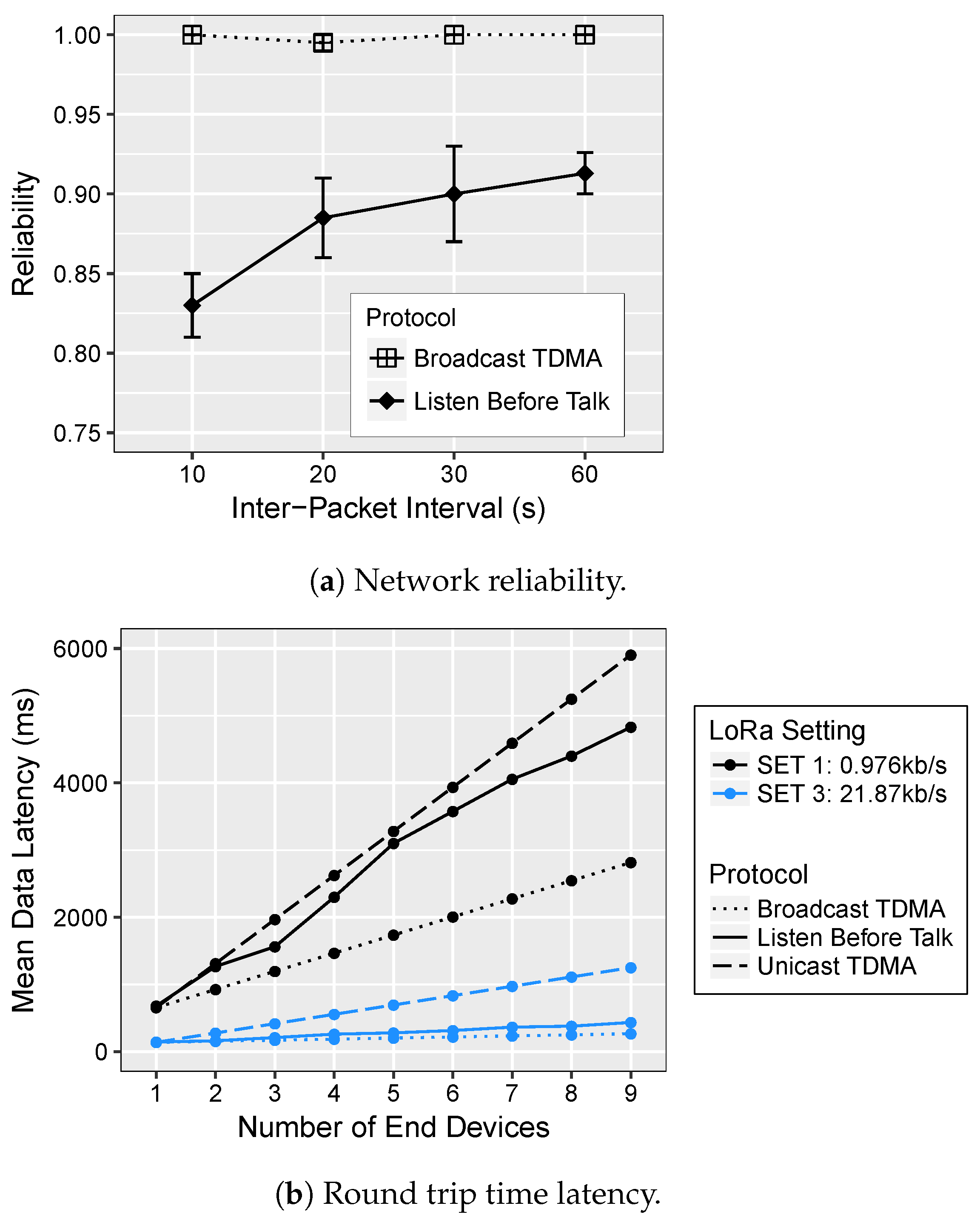
5.3.1. Packet Delivery Ratio
5.3.2. Latency
Broadcast TDMA vs. LBT
Unicast TDMA vs. Broadcast TDMA
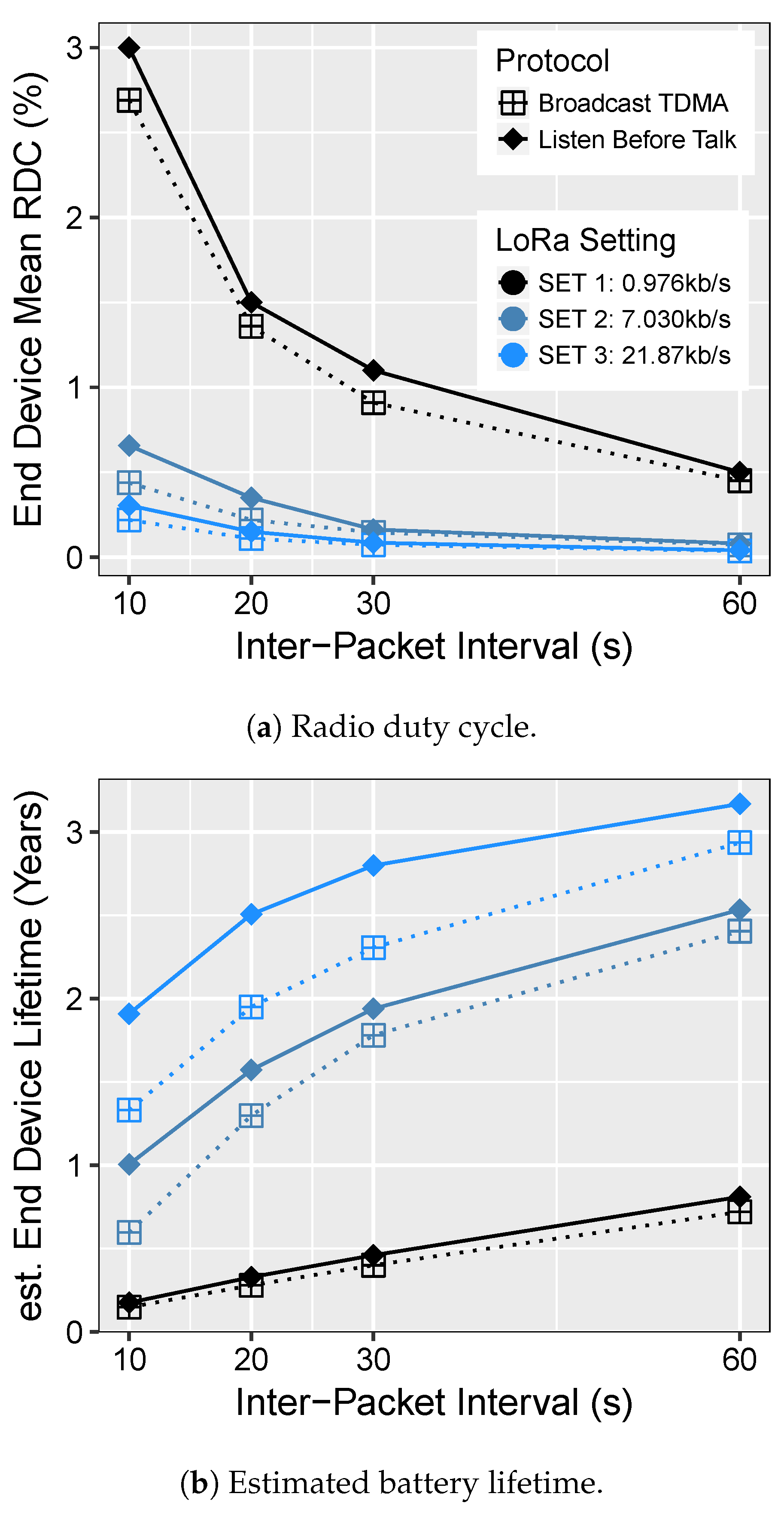
5.3.3. Energy Efficiency
Broadcast TDMA vs. LBT
Unicast TDMA vs. Broadcast TDMA
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| IoT | Internet of Things |
| LoRa | long range |
| TDMA | time division multiple access |
| MAC | medium access control |
| WuR | wake-up radio |
| WuRX | wake-up receiver |
| WuTX | wake-up transmitter |
| WuB | wake-up beacon |
| ISM | Industrial, Scientific and Medical |
| LPWAN | low power wide area network |
| CSS | chirp spread spectrum |
| SF | spreading factor |
| CR | coding rate |
| BW | bandwidth |
| TP | transmission power |
| OOK | on-off keying |
| MCU | microcontroller unit |
| CSMA/CA | carrier sense multiple access with collision avoidance |
| LBT | listen before talk |
| CAD | channel activity detection |
| TI-MAC | transmitter-initiated MAC |
| RI-MAC | receiver-initiated MAC |
| PTW | pipelined tone wake-up |
| W-MAC | wake-up radio MAC |
| ED | end device |
| CH | cluster head |
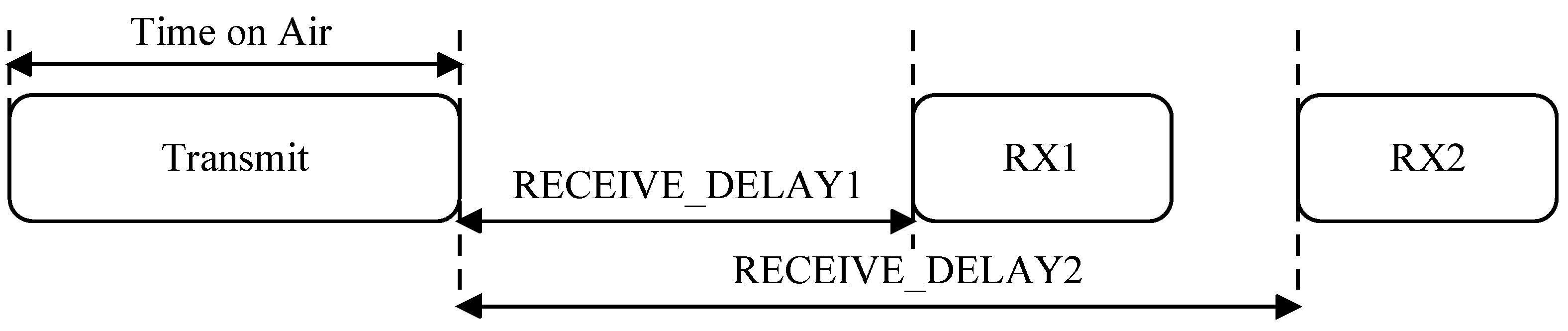
| ToA | time on air |
| guard time | |
| node id | |
| PDR | packet delivery ratio |
| RDC | radio duty cycle |
| RTT | round trip time |
| IPI | inter-packet interval |
| NB-IoT | Narrow Band Internet of Things |
Appendix A
- is the programmed preamble length
- is the symbol rate
- is the payload length in bytes (1–255)
- is the LoRa spreading factor (6–12)
- H is the packet header, zero when the header is enabled and one when no header is present
- is the data rate optimizer, one when enabled, zero otherwise
- is the LoRa coding rate [1: 4/5, 2: 4/6, 3: 4/7, 4: 4/8]
References
- Lu, C.; Saifullah, A.; Li, B.; Sha, M.; Gonzalez, H.; Gunatilaka, D.; Wu, C.; Nie, L.; Chen, Y. Real-Time Wireless Sensor-Actuator Networks for Industrial Cyber-Physical Systems. Proc. IEEE 2016, 104, 1013–1024. [Google Scholar] [CrossRef]
- Spectrum, I. Popular Internet of Things Forecast of 50 Billion Devices by 2020 Is Outdated. 2018. Available online: https://spectrum.ieee.org/tech-talk/telecom/internet/popular-internet-of-things-forecast-of-50-billion-devices-by-2020-is-outdated (accessed on 10 January 2018).
- Morin, E.; Maman, M.; Guizzetti, R.; Duda, A. Comparison of the Device Lifetime in Wireless Networks for the Internet of Things. IEEE Access 2017, 5, 7097–7114. [Google Scholar] [CrossRef]
- IEEE Standard for Low-Rate Wireless Networks. IEEE Std 802.15.4-2015 (Revision of IEEE Std 802.15.4-2011). 2016, pp. 1–709. Available online: https://standards.ieee.org/standard/802_15_4-2015.html (accessed on 29 October 2018).
- Cattani, M.; Boano, C.A.; Römer, K. An Experimental Evaluation of the Reliability of LoRa Long-Range Low-Power Wireless Communication. J. Sens. Actuator Netw. 2017, 6, 7. [Google Scholar] [CrossRef]
- Alliance, L. LoRaWAN Specification. LoRa Alliance. Available online: https://lora-alliance.org/resourcehub/lorawantm-specification-v11 (accessed on 29 October 2018).
- Mansourkiaie, F.; Ismail, L.S.; Elfouly, T.M.; Ahmed, M.H. Maximizing Lifetime in Wireless Sensor Network for Structural Health Monitoring with and without Energy Harvesting. IEEE Access 2017, 5, 2383–2395. [Google Scholar] [CrossRef]
- Liu, G.; Tan, R.; Zhou, R.; Xing, G.; Song, W.Z.; Lees, J.M. Volcanic Earthquake Timing Using Wireless Sensor Networks. In Proceedings of the 12th International Conference on Information Processing in Sensor Networks, New York, NY, USA, 8–11 April 2013; pp. 91–102. [Google Scholar]
- Bor, M.C.; Roedig, U.; Voigt, T.; Alonso, J.M. Do LoRa Low-Power Wide-Area Networks Scale? In Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, New York, NY, USA, 13–17 November 2016; pp. 59–67. [Google Scholar]
- Piyare, R.; Murphy, A.L.; Kiraly, C.; Tosato, P.; Brunelli, D. Ultra Low Power Wake-Up Radios: A Hardware and Networking Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2117–2157. [Google Scholar] [CrossRef]
- Magno, M.; Jelicic, V.; Srbinovski, B.; Bilas, V.; Popovici, E.; Benini, L. Design, Implementation, and Performance Evaluation of a Flexible Low-Latency Nanowatt Wake-Up Radio Receiver. IEEE Trans. Ind. Inf. 2016, 12, 633–644. [Google Scholar] [CrossRef]
- Casals, L.; Mir, B.; Vidal, R.; Gomez, C. Modeling the Energy Performance of LoRaWAN. Sensors 2017, 17, 2364. [Google Scholar] [CrossRef] [PubMed]
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low Power Wide Area Networks: An Overview. IEEE Commun. Surv. Tutor. 2017, 19, 855–873. [Google Scholar] [CrossRef] [Green Version]
- LoRa Alliance Technology. Available online: https://lora-alliance.org/ (accessed on 3 October 2017).
- Ansari, J.; Pankin, D.; Mähönen, P. Radio-triggered Wake-ups with Addressing Capabilities for Extremely Low Power Sensor Network Applications. Int. J. Wirel. Inf. Netw. 2009, 16, 118. [Google Scholar] [CrossRef]
- Cheng, K.W.; Chen, S.E. An Ultra low-Power Wake-Up Receiver Based on Direct Active RF Detection. IEEE Trans. Circuits Syst. I 2017, 64, 1661–1672. [Google Scholar] [CrossRef]
- Xie, Z.; Xu, R.; Lei, L. A Study of Clear Channel Assessment Performance for Low Power Wide Area Networks. In Proceedings of the 10th International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2014), Beijing, China, 26–28 September 2014; pp. 311–315. [Google Scholar]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef] [Green Version]
- Georgiou, O.; Raza, U. Low Power Wide Area Network Analysis: Can LoRa Scale? IEEE Wirel. Commun. Lett. 2017, 6, 162–165. [Google Scholar] [CrossRef] [Green Version]
- Laya, A.; Kalalas, C.; Vazquez-Gallego, F.; Alonso, L.; Alonso-Zarate, J. Goodbye, ALOHA! IEEE Access 2016, 4, 2029–2044. [Google Scholar] [CrossRef]
- Pop, A.I.; Raza, U.; Kulkarni, P.; Sooriyabandara, M. Does Bidirectional Traffic Do More Harm Than Good in LoRaWAN Based LPWA Networks? In Proceedings of the IEEE Global Communications Conference (GLOBECOM 2017), Singapore, 4–8 December 2017. [Google Scholar]
- Reynders, B.; Wang, Q.; Tuset-Peiro, P.; Vilajosana, X.; Pollin, S. Improving Reliability and Scalability of LoRaWANs through Lightweight Scheduling. IEEE Int. Things J. 2018, 5, 1830–1842. [Google Scholar] [CrossRef]
- Liao, C.H.; Zhu, G.; Kuwabara, D.; Suzuki, M.; Morikawa, H. Multi-Hop LoRa Networks Enabled by Concurrent Transmission. IEEE Access 2017, 5, 21430–21446. [Google Scholar] [CrossRef]
- Bor, M.; Vidler, J.; Roedig, U. LoRa for the Internet of Things. In Proceedings of the 2016 International Conference on Embedded Wireless Systems and Networks (EWSN), Porto, Portugal, 9–11 February 2016; pp. 361–366. [Google Scholar]
- Labs, L. Symphony Link a Revolutionary Wireless System for Wide-Area IoT Networks. 2017. Available online: https://www.link-labs.com/symphony (accessed on 15 September 2017).
- Oller, J.; Demirkol, I.; Casademont, J.; Paradells, J.; Gamm, G.U.; Reindl, L. Has Time Come to Switch From Duty-Cycled MAC Protocols to Wake-Up Radio for Wireless Sensor Networks? IEEE Trans. Netw. 2016, 24, 674–687. [Google Scholar] [CrossRef]
- Schurgers, C.; Tsiatsis, V.; Ganeriwal, S.; Srivastava, M. Optimizing Sensor Networks in the Energy-latency-density Design Space. IEEE Trans. Mob. Comput. 2002, 99, 70–80. [Google Scholar] [CrossRef]
- Yang, X.; Vaidya, N.H. A Wakeup Scheme for Sensor Networks: Achieving Balance between Energy Saving and End-to-end Delay. In Proceedings of the 10th IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Toronto, ON, Canada, 25–28 May 2004; pp. 19–26. [Google Scholar]
- Le, T.N.; Pegatoquet, A.; Magno, M. Asynchronous On demand Mac Protocol using Wake-up Radio in Wireless Body Area Network. In Proceedings of the 6th IEEE International Workshop on Advances in Sensors and Interfaces (IWASI), Gallipoli, Italy, 18–19 June 2015; pp. 228–233. [Google Scholar]
- Lebreton, J.; Murad, N. Implementation of a Wake-up Radio Cross-layer Protocol in OMNeT++/MiXiM. arXiv, 2015; arXiv:1509.03553. [Google Scholar]
- Piyare, R.; Istomin, T.; Murphy, A.L. WaCo: A Wake-Up Radio COOJA Extension for Simulating Ultra Low Power Radios. In Proceedings of the 2017 International Conference on Embedded Wireless Systems and Networks (EWSN), Uppsala, Sweden, 14–16 February 2017; pp. 48–53. [Google Scholar]
- Sutton, F.; Buchli, B.; Beutel, J.; Thiele, L. Zippy: On-demand Network Flooding. In Proceedings of the 2015 International Conference on Embedded Networked Sensor Systems (EWSN), Seoul, Korea, 1–4 November 2015; pp. 45–58. [Google Scholar]
- Sutton, F.; Da Forno, R.; Beutel, J.; Thiele, L. BLITZ: A Network Architecture for Low Latency and Energy-efficient Event-triggered Wireless Communication. In Proceedings of the 4th ACM Workshop on Hot Topics in Wireless (HotWireless), Snowbird, UT, USA, 16–20 October 2017. [Google Scholar]
- Magno, M.; Aoudia, F.A.; Gautier, M.; Berder, O.; Benini, L. WULoRa: An Energy Efficient IoT End-node for Energy Harvesting and Heterogeneous Communication. In Proceedings of the 2017 Design, Automation & Test in Europe Conference & Exhibition (DATE), Lausanne, Switzerland, 27–31 March 2017; pp. 1528–1533. [Google Scholar]
- Pasolini, G.; Buratti, C.; Feltrin, L.; Zabini, F.; De Castro, C.; Verdone, R.; Andrisano, O. Smart City Pilot Projects Using LoRa and IEEE802.15.4 Technologies. Sensors 2018, 18, 1118. [Google Scholar] [CrossRef] [PubMed]
- Piyare, R.; Murphy, A.L.; Magno, M.; Benini, L. KRATOS: An Open Source Hardware-Software Platform for Rapid Research in LPWANs. In Proceedings of the IEEE 14th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Limassol, Cyprus, 15–17 October 2018. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| States | Power Consumption |
| SX1276 in listening mode | 50 mW |
| SX1276 transmitting at +14 dBm (LoRa mode) | 250 mW |
| Mote in deep sleep mode, wake-up receiver listening | 1.83 W |
| Wake-up receiver (receiving + address decoding) | 284 W |
| Wake-up transmitter at +14 dBm | 260 mW |
| Other Parameters | |
| Wake-up radio data rate | 1 kbps |
| Wake-up beacon packet size | 2 B |
| LoRa Radio Setting | SET 1 | SET 2 | SET 3 |
|---|---|---|---|
| Spreading Factor | 12 | 9 | 7 |
| Coding Rate | 4/6 | 4/5 | 4/5 |
| Bandwidth (kHz) | 500 | 500 | 500 |
| Data Rate (kb/s) | 0.976 | 7.03 | 21.87 |
| Transmission Power (dBm) | 10 | 10 | 10 |
| Payload (B) | 8 | 8 | 8 |
| Preamble Length (symbols) | 8 | 8 | 8 |
| Carrier Frequency (MHz) | 868 | 868 | 868 |
| Time-on-air (measured (ms)) | 264 | 31 | 9 |
| LoRa Radio Setting | SET 1 | SET 2 | SET 3 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TDMA Mode | No. of EDs | Sink (mJ) | CH (mJ) | ED (mJ) | RTT Latency (ms) | Sink (mJ) | CH (mJ) | ED (mJ) | RTT Latency (ms) | Sink (mJ) | CH (mJ) | ED (mJ) | RTT Latency (ms) |
| Unicast | 1 | 65 | 36.4 | 46.2 | 656 | 12.93 | 12.83 | 6.15 | 183 | 8 | 10.63 | 2.37 | 139 |
| 5 | 325 | 182 | 231 | 3280 | 64.65 | 64.15 | 30.75 | 915 | 40 | 53.15 | 11.85 | 695 | |
| 9 | 585 | 327.8 | 415.8 | 5904 | 116.37 | 115.47 | 55.35 | 1647 | 72 | 95.67 | 21.33 | 1251 | |
| Broadcast | 1 | 65 | 36.4 | 46.2 | 656 | 12.93 | 12.83 | 6.15 | 183 | 8 | 10.63 | 2.37 | 139 |
| 5 | 119 | 90.4 | 231 | 1736 | 20.33 | 20.23 | 30.75 | 331 | 11.2 | 13.83 | 11.85 | 203 | |
| 9 | 173 | 144 | 415.8 | 2816 | 27.2 | 27.6 | 55.35 | 479 | 14.4 | 17.03 | 21.33 | 267 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piyare, R.; Murphy, A.L.; Magno, M.; Benini, L. On-Demand LoRa: Asynchronous TDMA for Energy Efficient and Low Latency Communication in IoT. Sensors 2018, 18, 3718. https://doi.org/10.3390/s18113718
Piyare R, Murphy AL, Magno M, Benini L. On-Demand LoRa: Asynchronous TDMA for Energy Efficient and Low Latency Communication in IoT. Sensors. 2018; 18(11):3718. https://doi.org/10.3390/s18113718
Chicago/Turabian StylePiyare, Rajeev, Amy L. Murphy, Michele Magno, and Luca Benini. 2018. "On-Demand LoRa: Asynchronous TDMA for Energy Efficient and Low Latency Communication in IoT" Sensors 18, no. 11: 3718. https://doi.org/10.3390/s18113718
APA StylePiyare, R., Murphy, A. L., Magno, M., & Benini, L. (2018). On-Demand LoRa: Asynchronous TDMA for Energy Efficient and Low Latency Communication in IoT. Sensors, 18(11), 3718. https://doi.org/10.3390/s18113718