A Joining Procedure and Synchronization for TSCH-RPL Wireless Sensor Networks

 , and
, and
Abstract
:1. Introduction
2. Overview on the IEEE 802.15.4 TSCH and RPL
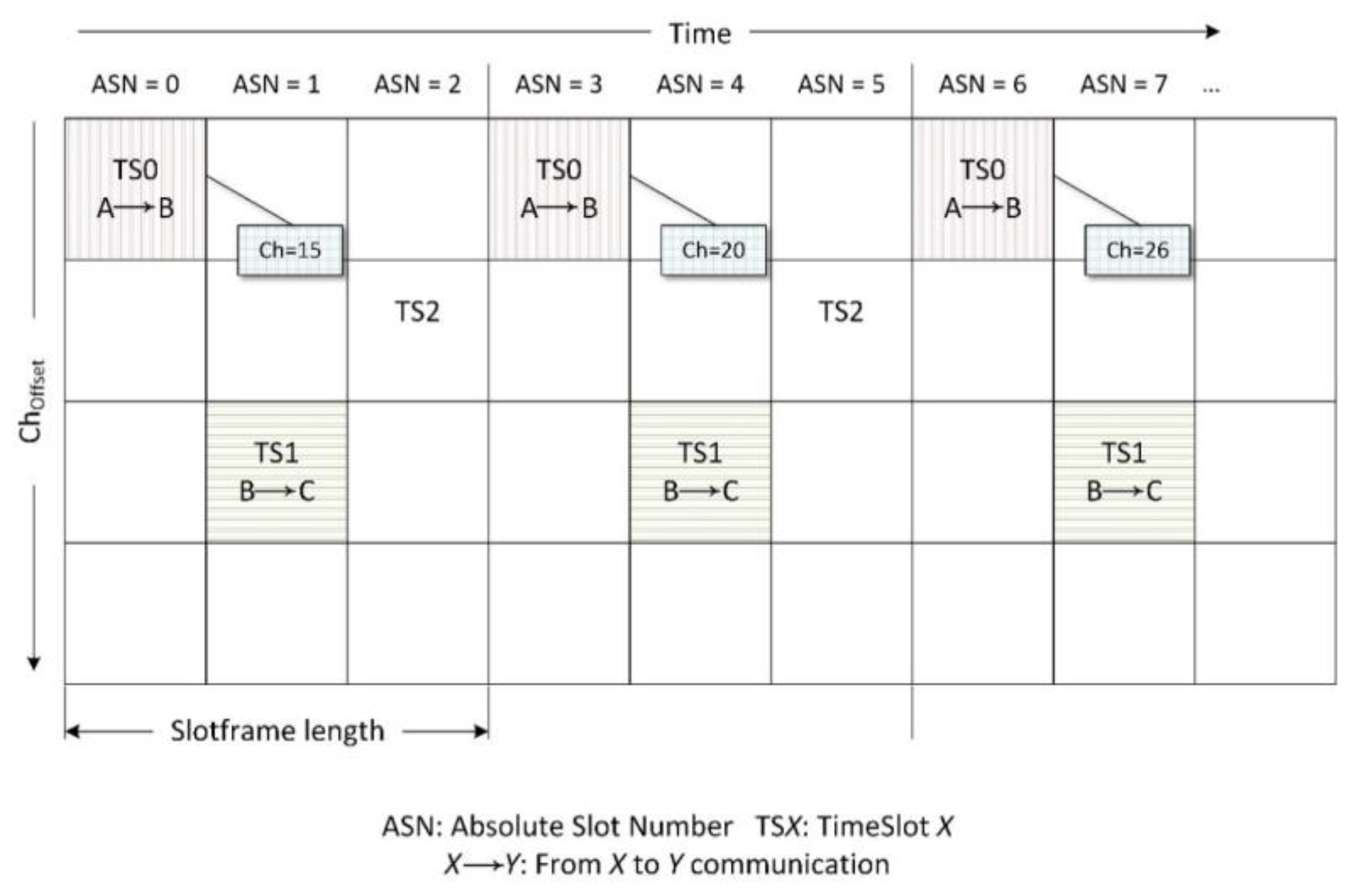
2.1. Time-Slotted Channel Hopping
TSCH Scanning and Synchronization Procedures
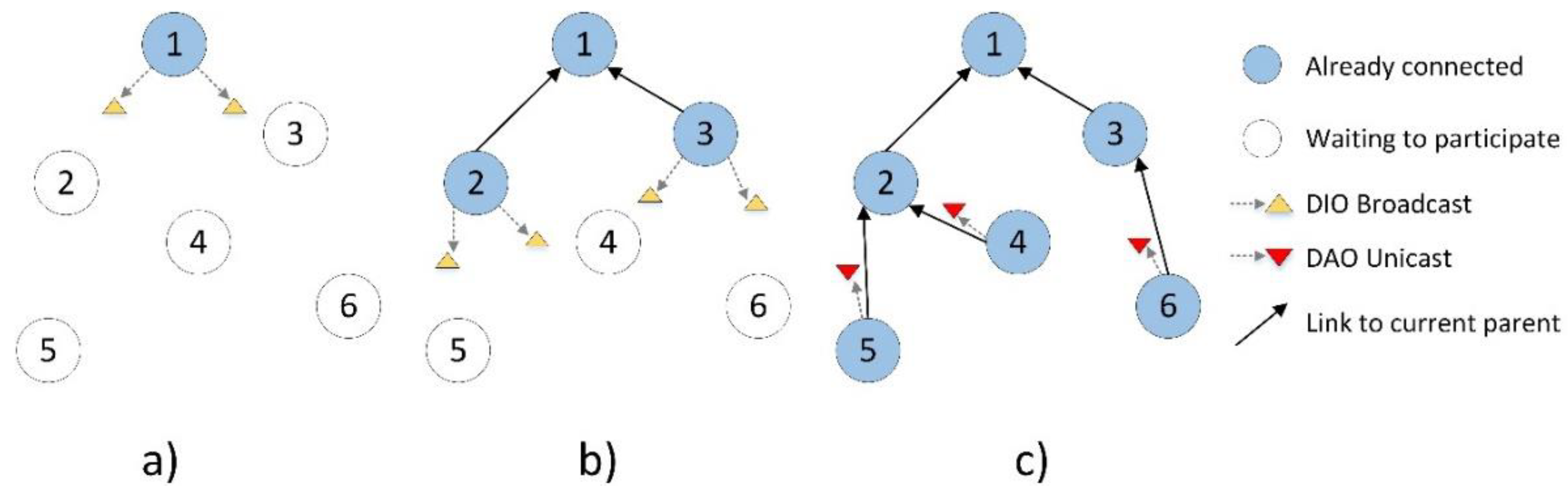
2.2. RPL: The IPv6 Routing Protocol for Low-Power and Lossy Networks
RPL DIO Transmission Using a Trickle Timer
- The configuration of the Trickle Timer mechanism is based on three basic parameters: IntervalMin (), Interval Doublings (), and Redundancy Constant (). Taking into account these parameters, the Trickle Timer mechanism works in the following way:
- When the algorithm is started, the current value of the timer is set to its minimum value, which is defined by the parameter, after which the first interval of this duration begins.
- Whenever the node listens to a transmission that it considers “consistent” with the current topology, it increments a counter called .
- When the timer expires, the node transmits if and only if the counter is less than the redundancy constant, which is defined as .
- When the timer expires, the algorithm doubles the length of the interval until it reaches the maximum value given by , and remains in this setup until an event resets the timer.
- If a node receives a transmission that it considers “inconsistent”, the node resets the Trickle Timer. To restart it, the node sets the timer back to .
3. Related Work
4. Joining Procedure and Time Synchronization Problems
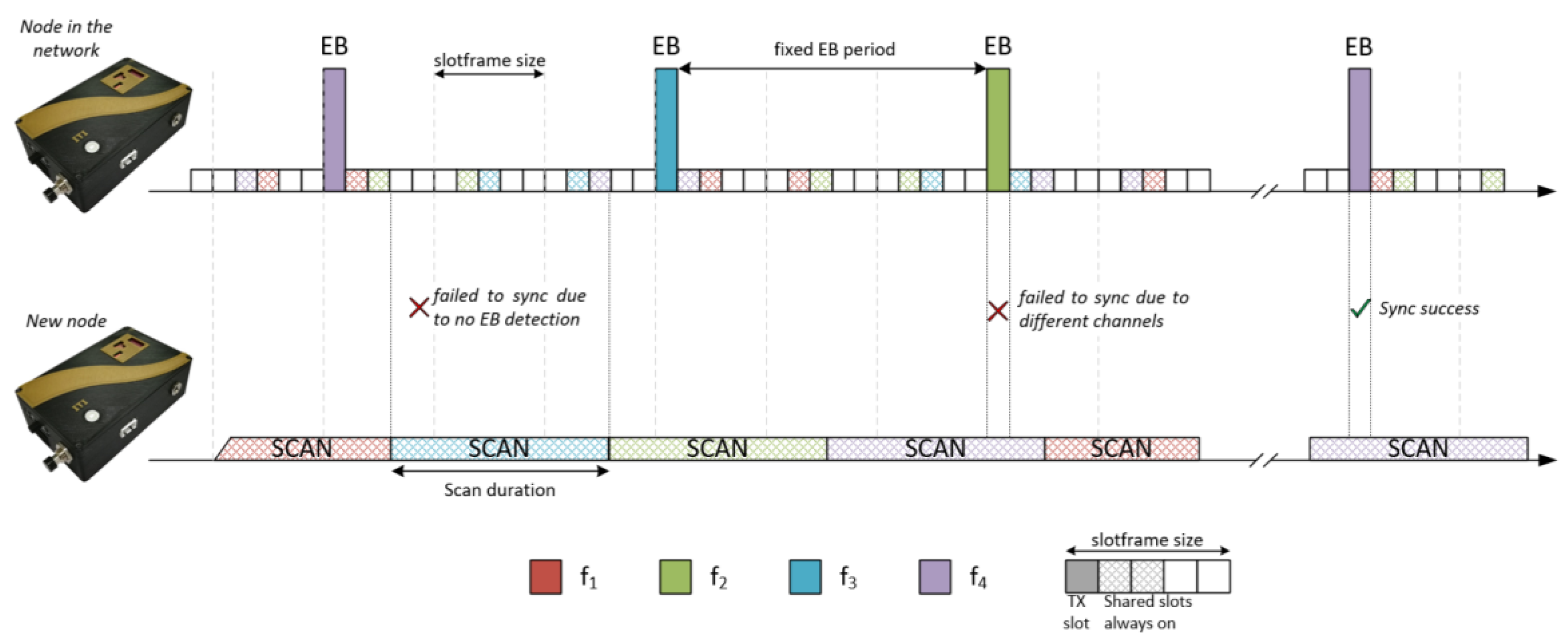
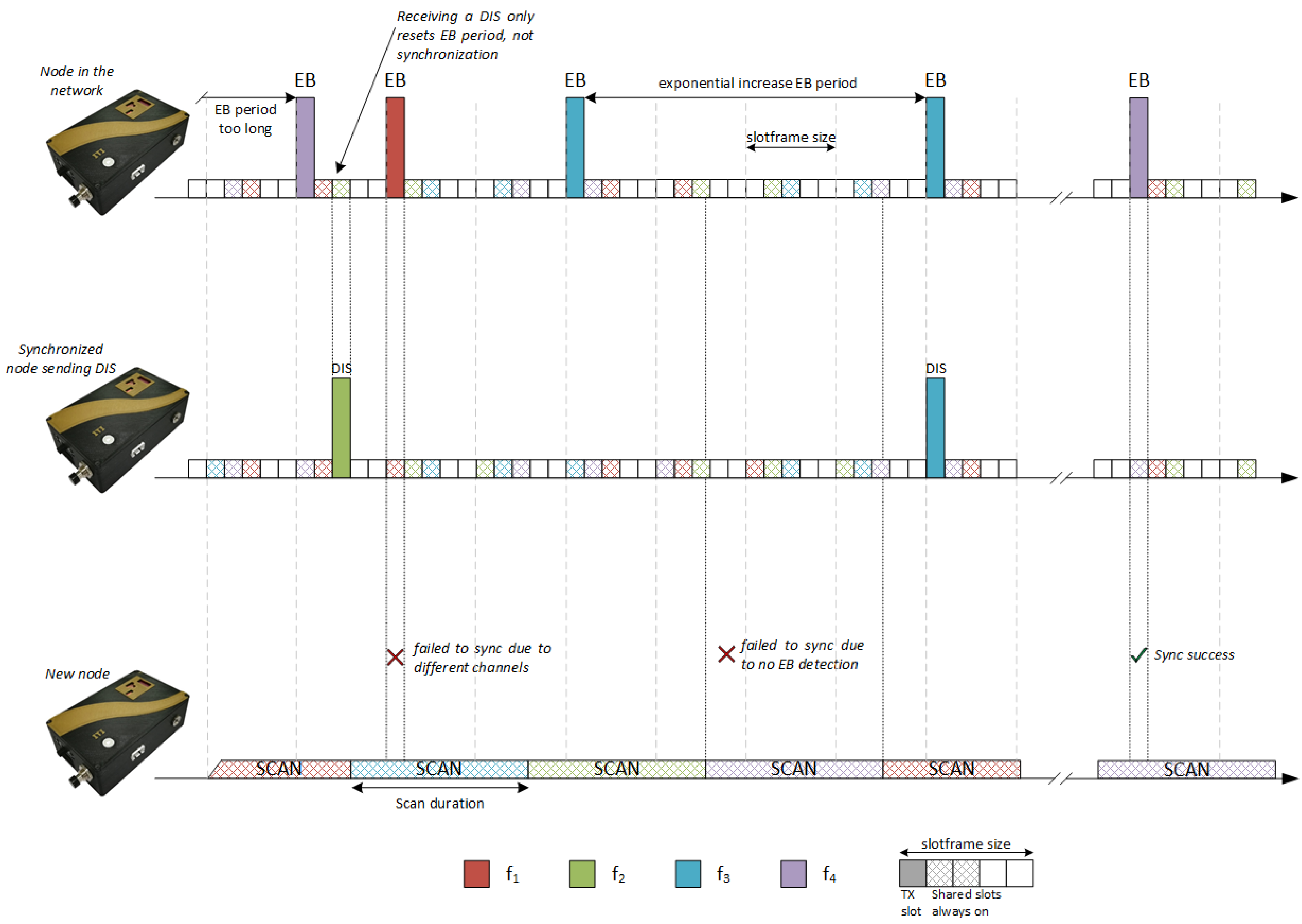
4.1. TSCH Network: Scan Phase and Enhanced Beacon Broadcasting
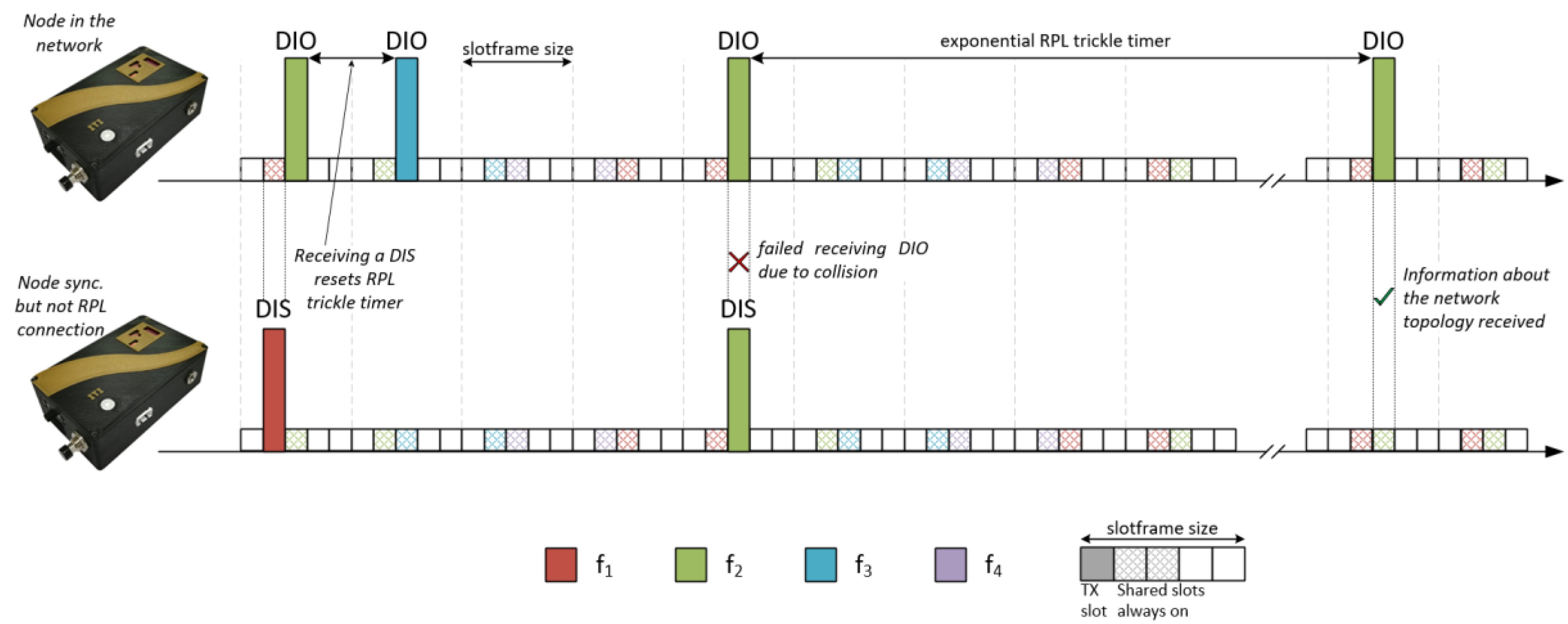
4.2. Exchange of RPL Control Messages
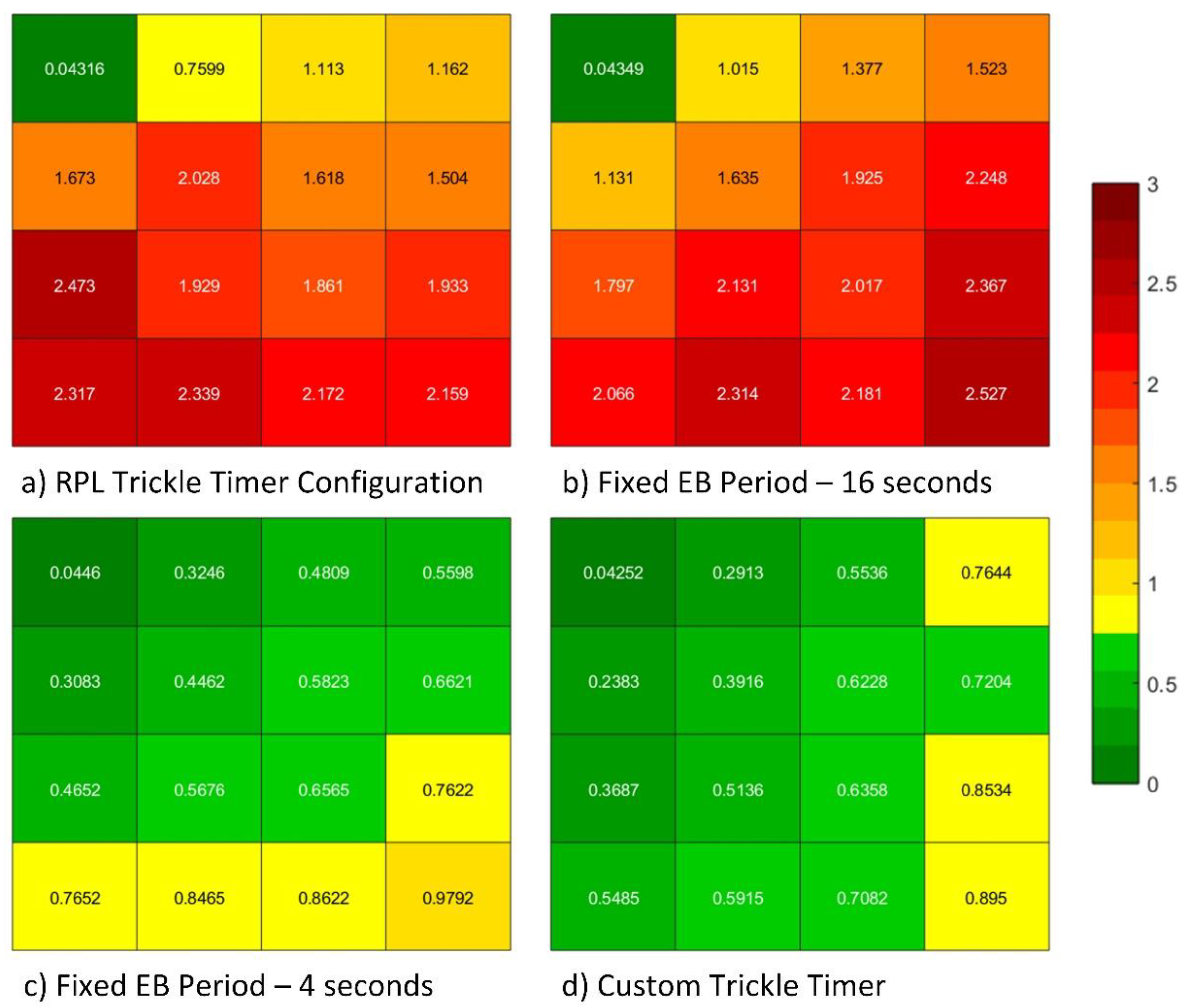
4.3. Enhanced Beacon Period Using the RPL Trickle Timer
4.4. Common Configurations, the Proposal, and Involved Parameters
- the number of channels used during transmission;
- the number of channels used for scanning the medium before synchronization;
- the EB (beacon) period, be it fixed or variable; and
- the RPL control message (DIS, DIO) period.
5. Simulations and Testbeds
6. Results
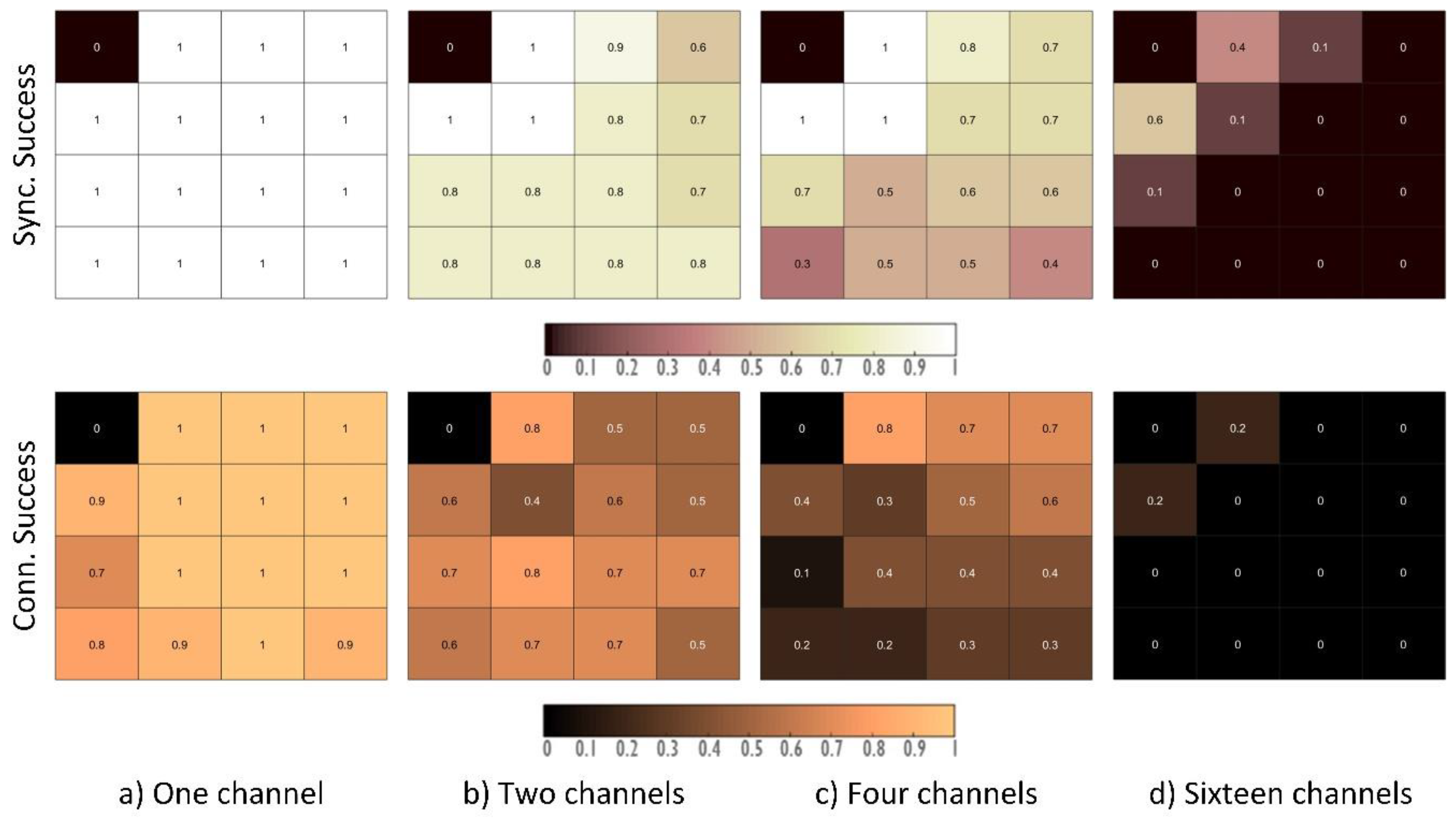
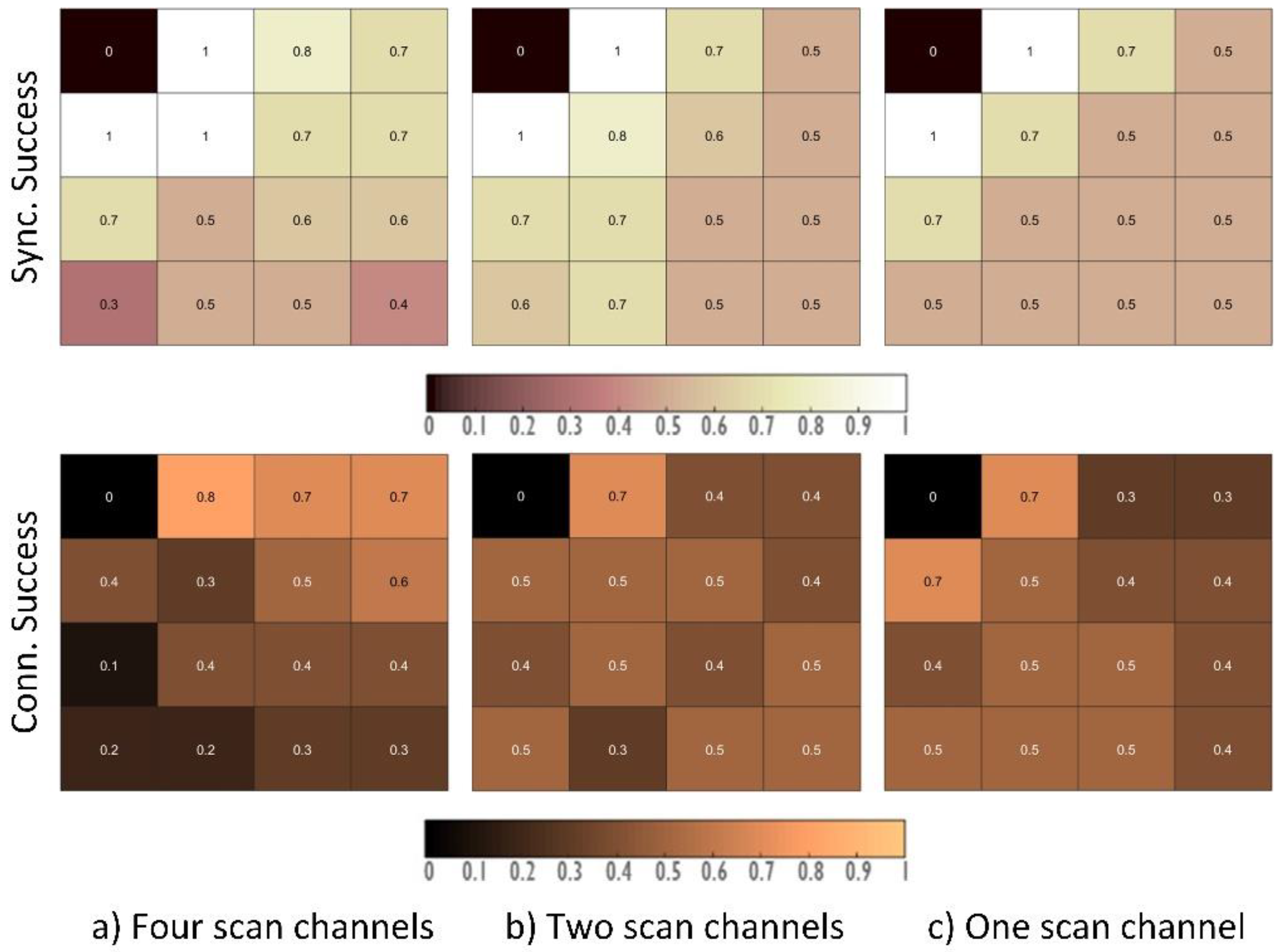
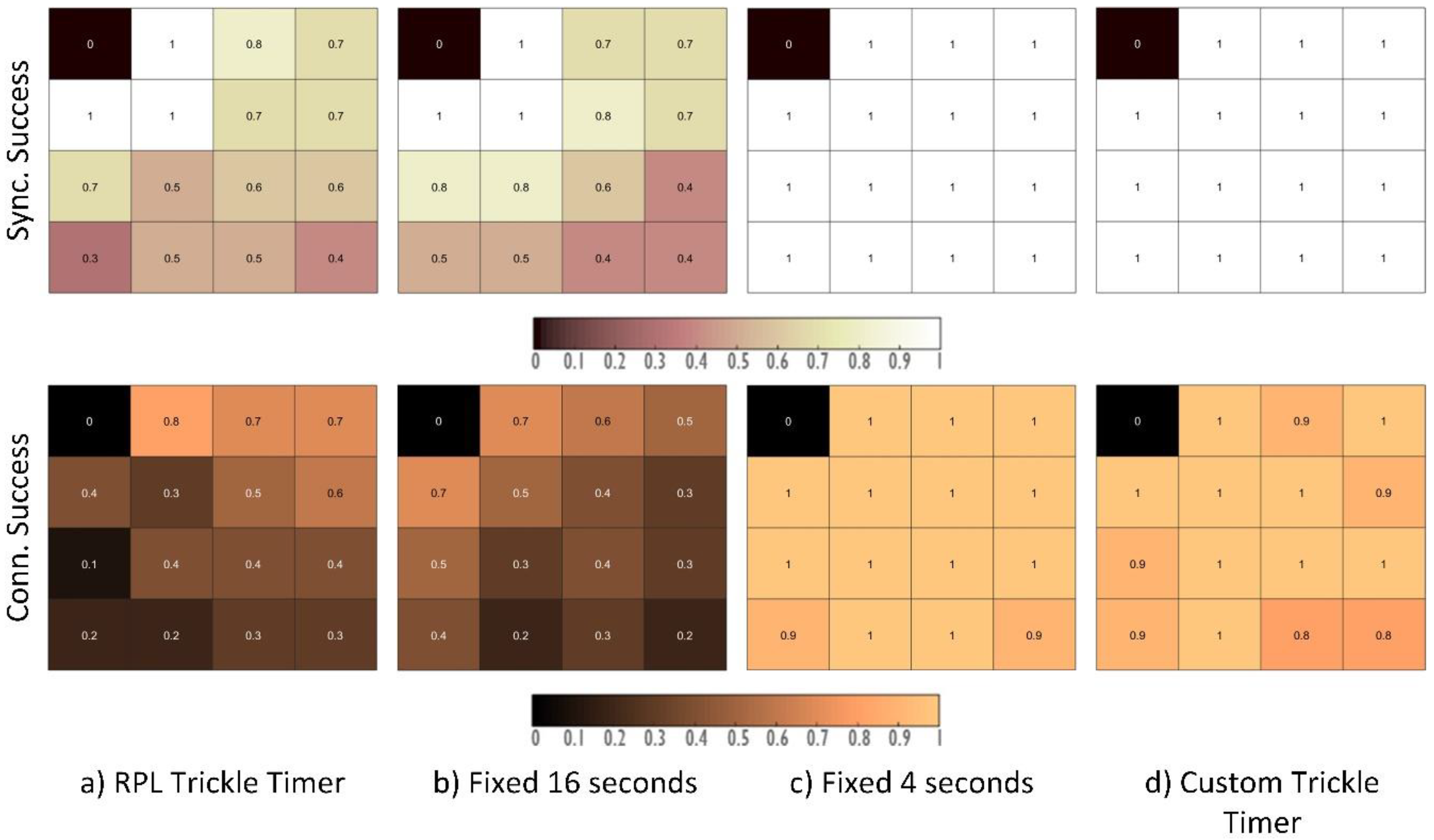
6.1. Probability of Connection Success
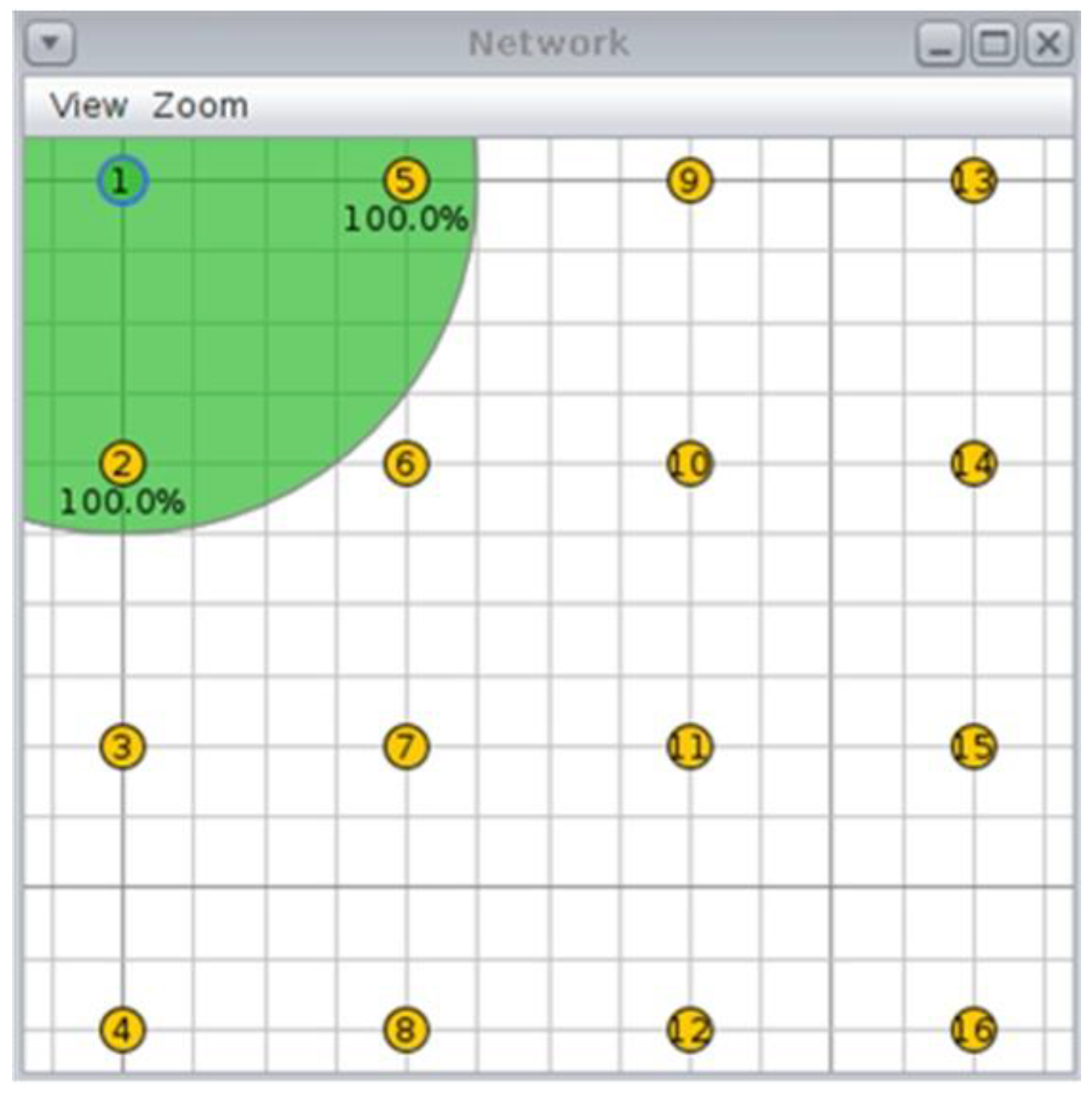
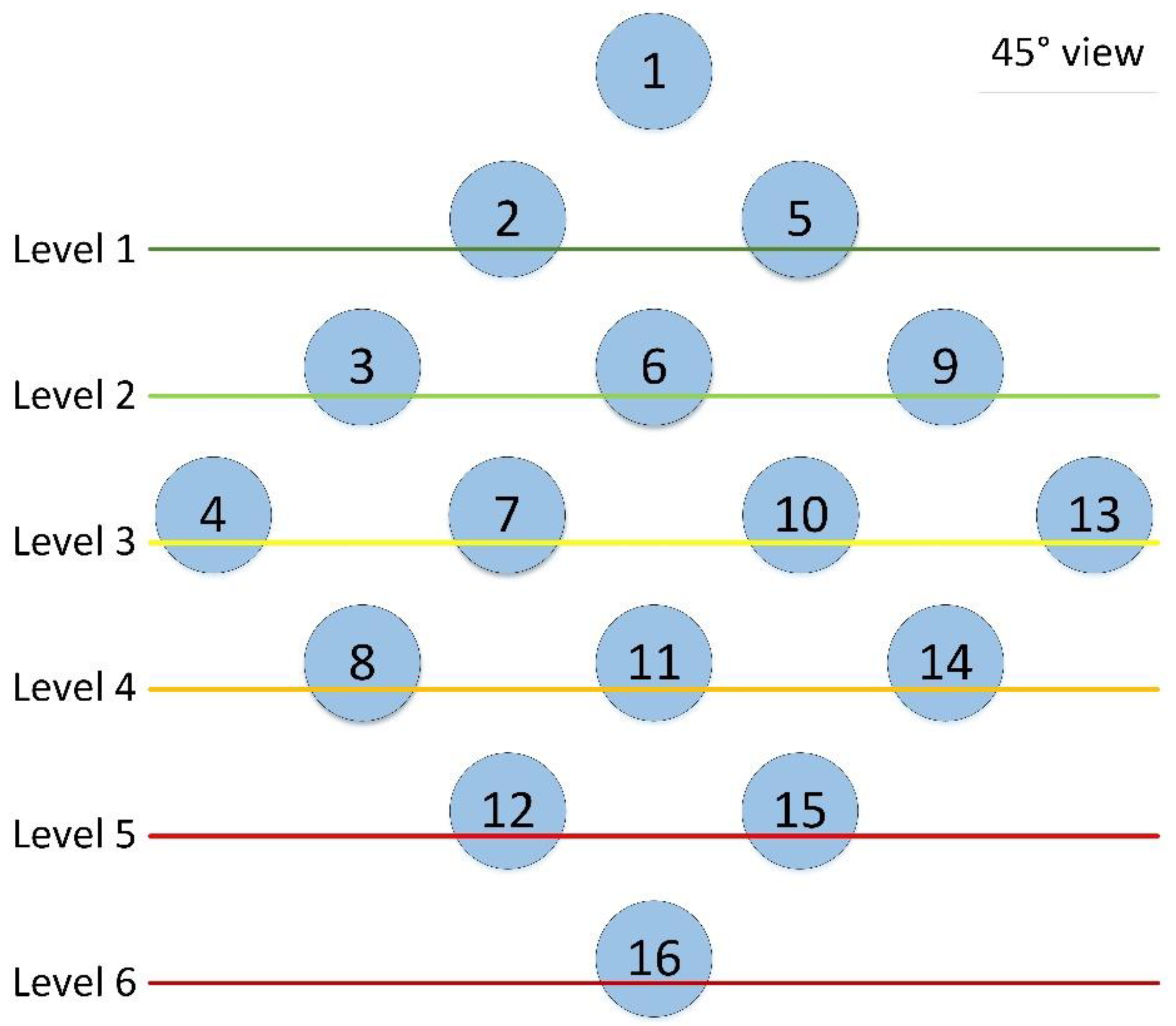
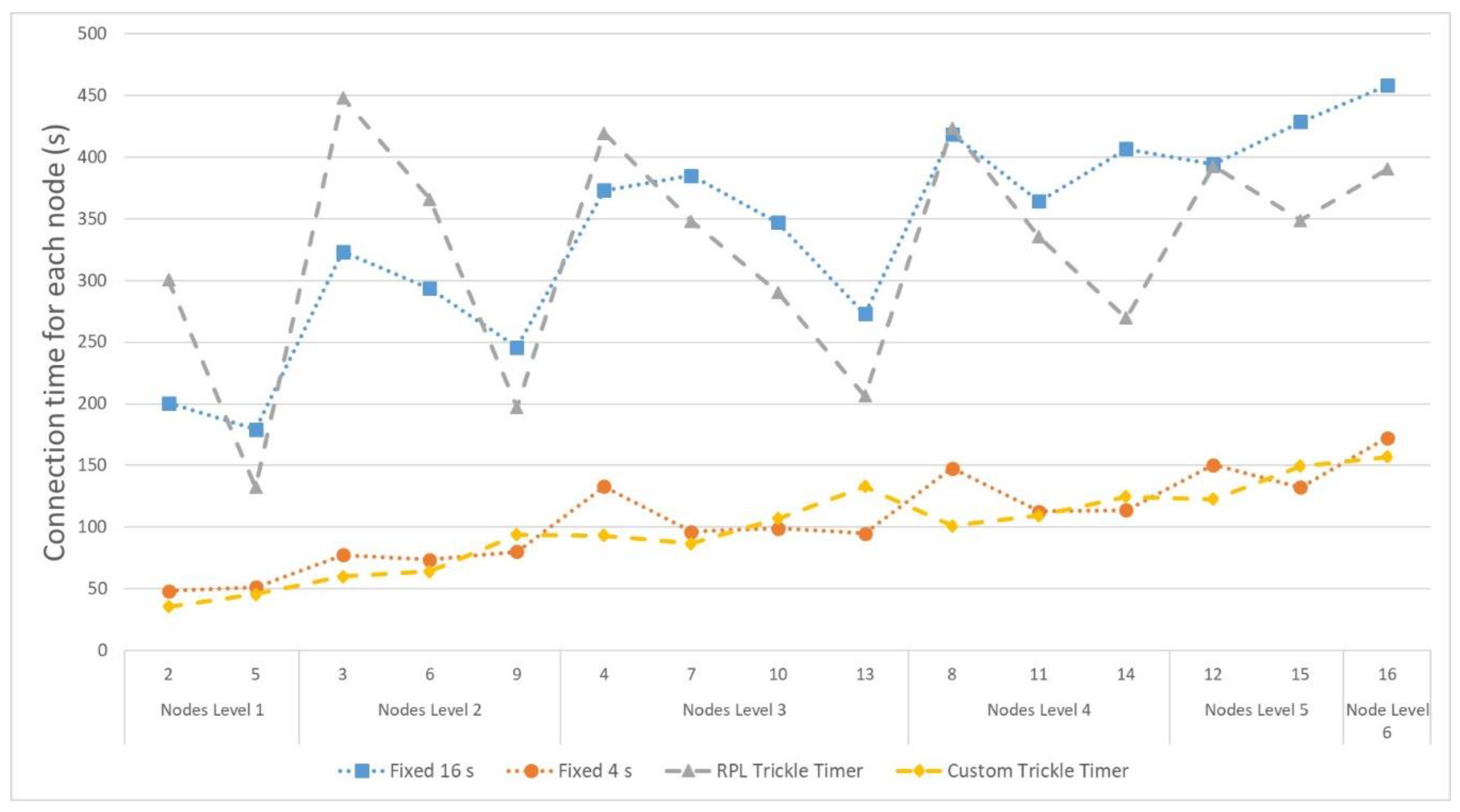
6.2. Scalability and Topology Considerations
7. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Leitão, P.; Colombo, A.W.; Karnoukos, S. Industrial automation based on cyber-pysical systems technologies: Prototype implementations and challenges. Comput. Ind. 2016, 81, 11–25. [Google Scholar] [CrossRef]
- Khanafer, M.; Guennoun, M.; Mouflah, H.T. A Survey of Beacon-Enabled IEEE 802.15.4 MAC Protocols in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16856–16876. [Google Scholar] [CrossRef]
- IEC 62591:2016—Industrial Networks—Wireless Communication Network and Communication Profiles—WirelessHART; International Electrotechnical Commission: Geneva, Switzerland, 2016.
- IEC 62734:2014—Industrial Networks—Wireless Communication Network and Communication Profiles—ISA 100.11a.: 2014; International Electrotechnical Commission: Geneva, Switzerland, 2014.
- IEC 62601:2015—Industrial Networks—Wireless Communication Network and Communication Profiles—WIA-PA; International Electrotechnical Commission: Geneva, Switzerland, 2015.
- ZigBee Alliance, ZigBee Specification, 2012. Available online: https://www.zigbee.org/download/standards-zigbee-specification/ (accessed on 19 October 2018).
- IEEE 802.15.4-2015. IEEE Standard for Local and Metropolitan Area Networks—Specific Requirements Part 15.4: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low Rate Wireless Personal Area Networks (LR-WPANs). Available online: https://ieeexplore.ieee.org/document/7460875 (accessed on 19 October 2018).
- Borgia, E. The Internet of Things vision: Key features, applications and open issues. Comput. Commun. 2014, 54, 1–31. [Google Scholar] [CrossRef]
- De Guglielmo, D.; Anastasi, G.; Seghetti, A. From IEEE 802.15.4 to IEEE 802.15.4e: A step towards the Internet of Things. In Advances onto the Internet of Things. Advances in Intelligent Systems and Computing; Gaglio, S., Lo Re, G., Eds.; Springer: Cham, Swizerland, 2014; Volume 260, pp. 135–152. [Google Scholar]
- Duquennoy, S.; al Nahas, B.; Landsiedel, O.; Watteyne, T. Orchestra: Robust Mesh Networks through Autonomously Scheduled TSCH. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems, Seoul, South Korea, 1–4 November 2015; pp. 337–350. [Google Scholar]
- Winter, T.; Brandt, A.; Hui, J.W.; Kelsey, R.; Levis, P.; Pister, K.; Struik, R.; Vasseur, J.P.; Alexander, R.K. RFC 6550—RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks. In Internet Engineering Task Force (IETF) Proposed Standard; Internet Engineering Task Force: Fremont, CA, USA, 2012. [Google Scholar]
- Levis, P.; Clausen, T.; Hui, J.; Gnawali, O.; Ko, J. RFC 6206—The Trickle Algorithm. In Internet Engineering Task Force (IETF) Proposed Standard; Internet Engineering Task Force: Fremont, CA, USA, 2011. [Google Scholar]
- Contiki: The Open Source OS for the Internet of Things: Official Website. Available online: www.contiki-os.org (accessed on 19 October 2018).
- Stanislowski, D.; Vilajosana, X.; Wang, Q.; Watteyne, T.; Pister, K.S.J. Adaptive Synchronization in IEEE802.15.4e Networks. IEEE Trans. Ind. Inform. 2014, 10, 798–802. [Google Scholar] [CrossRef]
- Chang, T.; Watteyne, T.; Pister, K.; Wang, Q. Adaptive synchronization in multi-hop TSCH networks. Comput. Netw. 2015, 76, 165–176. [Google Scholar] [CrossRef]
- Elsts, A.; Duquennoy, S.; Fafoutis, X.; Oikonomou, G.; Piechocki, R.; Craddock, I. Microsecond-Accuracy Time Synchronization Using the IEEE 802.15.4 TSCH Protocol. In Proceedings of the IEEE 41st Conference on Local Computer Networks Workshops (LCN Workshops), Dubai, UAE, 7–10 November 2016; pp. 156–164. [Google Scholar]
- Elsts, A.; Fafoutis, X.; Adeyinka, A.; Piechocki, R.; Oikonomou, G.; Duquennoy, S.; Liñán, A.; Fàbregas, M. Competition: Adaptive Time-Slotted Channel Hopping. In Proceedings of the European Conference on Wireless Sensor Networks (EWSN), Uppsala, Sweden, 20–22 February 2017. [Google Scholar]
- Duquennoy, S.; Elsts, A.; Nahas, A.; Oikonomou, G. TSCH and 6TiSCH for Contiki: Challenges, Design and Evaluation. In Proceedings of the 13th International Conference on Distributed Computing in Sensor Systems (DCOSS), Ottawa, ON, Canada, 5–7 June 2017; pp. 1–8. [Google Scholar]
- Watteyne, T.; Palatella, M.; Grieco, L. RFC 7554: Using IEEE 802.15.4e Time-Slotted Channel Hopping (TSCH) in the Internet of Things (IoT): Problem Statement. In Internet Engineering Task Force (IETF) Informational Document; Internet Engineering Task Force: Fremont, CA, USA, May 2015. [Google Scholar]
- Vilajosana, X.; Pister, K.; Watteyne, T. RFC 8180: Minimal IPv6 over the TSCH Mode of IEEE 802.15.4e (6TiSCH) Configuration. In Internet Engineering Task Force (IETF) Informational Document; Internet Engineering Task Force: Fremont, CA, USA, May 2017. [Google Scholar]
- Vogli, E.; Ribezzo, G.; Grieco, L.A.; Boggia, G. Fast Join and Synchronization Schema in the IEEE 802.15.4e MAC. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 85–90. [Google Scholar]
- Vogli, E.; Ribezzo, G.; Grieco, L.A.; Boggia, G. Fast network joining algorithms in industrial IEEE 802.15.4 deployments. Ad Hoc Netw. 2018, 69, 65–75. [Google Scholar] [CrossRef]
- Duy, T.P.; Kim, Y. An Efficient Joining Scheme in IEEE 802.15.4e. In Proceedings of the IEEE International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 28–30 October 2015; pp. 226–229. [Google Scholar]
- Duy, T.P.; Dinh, T.; Kim, Y. A rapid joining scheme based on fuzzy logic for highly dynamic IEEE 802.15.4e time-slotted channel hopping networks. Int. J. Distrib. Sens. Netw. 2016, 12. [Google Scholar] [CrossRef] [Green Version]
- Khoufi, I.; Minet, P.; Livolant, E.; Rmili, B. Building an IEEE 802.15.4e TSCH network. In Proceedings of the IEEE 35th International Performance Computing and Communications Conference (IPCCC), Las Vegas, NV, USA, 9–11 December 2016; pp. 1–2. [Google Scholar]
- Khoufi, I.; Minet, P.; Rmili, B. Beacon Advertising in an IEEE 802.15.4e TSCH Network for Space Launch Vehicles. In Proceedings of the 7th European Conference for Aeronautics and Aerospace Sciences (EUCASS), Milan, Italy, 3–6 July 2017. [Google Scholar]
- Kim, J.Y.; Chung, S.E.; Ha, Y.V. A Fast Joining Scheme Based on Channel Quality for IEEE802.15.4e TSCH in Severe Interference Environment. In Proceedings of the IEEE 9th International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 427–432. [Google Scholar]
- De Guglielmo, D.; Seghetti, A.; Anastasi, G.; Conti, M. A Performance Analysis of the Network Formation Process in IEEE 802.15.4e TSCH Wireless Sensor/Actuator Networks. In Proceedings of the IEEE Symposium on Computers and Communication (ISCC), Madeira, Portugal, 23–26 June 2014. [Google Scholar]
- Wang, L.; Reinhardt, A. A Simulative Study of Network Association Delays in IEEE 802.15.4e TSCH Networks. In Proceedings of the IEEE 18th International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Macao, China, 12–15 June 2017; pp. 1–3. [Google Scholar]
- Vallati, C.; Brienza, S.; Anastasi, G.; Das, S.K. Improving network formation in 6TiSCH networks. IEEE Trans. Mobile Comput. 2018. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Parameters | |
|---|---|
| Min. number of Neighbors | 2 |
| Max. number of Neighbors | 4 |
| Min. number of hops (node 16) | 6 |
| Distance between neighbors | 40 m |
| Max. Simulation duration | 15 min |
| Parameters | Values | |
|---|---|---|
| Global Parameters | ||
| TSCH | Scan Duration (TSCAN) | 1 s |
| Timeslot duration (Tslot) | 10 ms | |
| TSCH Slotframe Schedule Default Orchestra Schedule [10] with multiple slotframes, each one for a particular traffic plane. | EBs: 397 slots in length with only two enabled (TX and RX) RPL: 31 slots in length with only one enabled (Shared) | |
| RPL | Trickle Timer Interval Min (Imin) | 12 |
| Trickle Timer Interval Doublings (ID) | 8 | |
| Trickle Timer Redundancy Constant (RC) | 10 | |
| DIS interval (DISTT) | 60 s | |
| Test 1: Different numbers of channels in steady-state | ||
| TSCH | Number of Channels (NC) | {1,2,4,16} channels |
| Number of Scan Channels (NSC) | Equal to NC | |
| Test 2: Different numbers of scan channels | ||
| TSCH | Number of Channels (NC) | 4 channels |
| Number of Scan Channels (NSC) | {1,2,4} channels | |
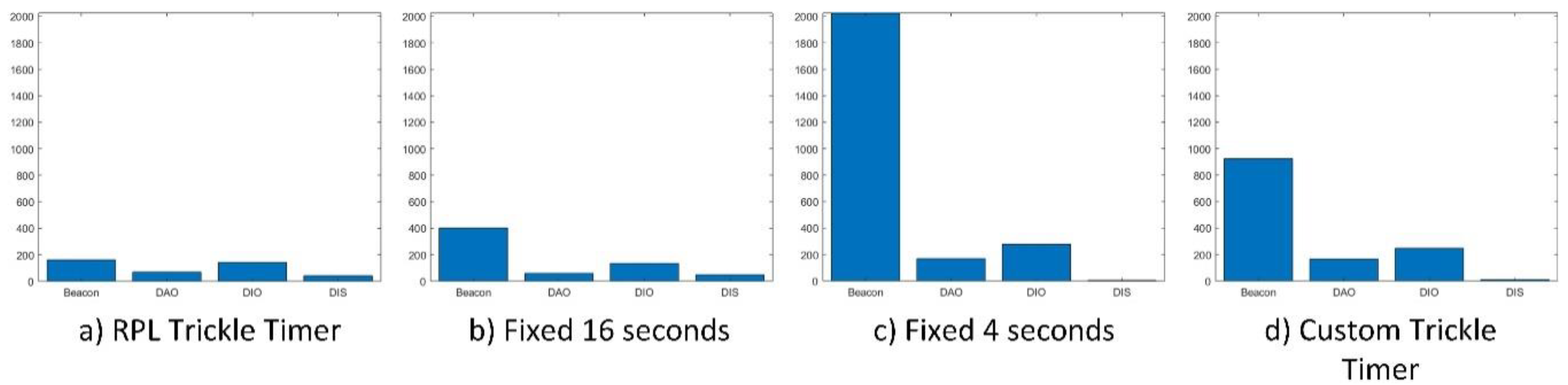
| Test 3: Different EB period configurations | ||
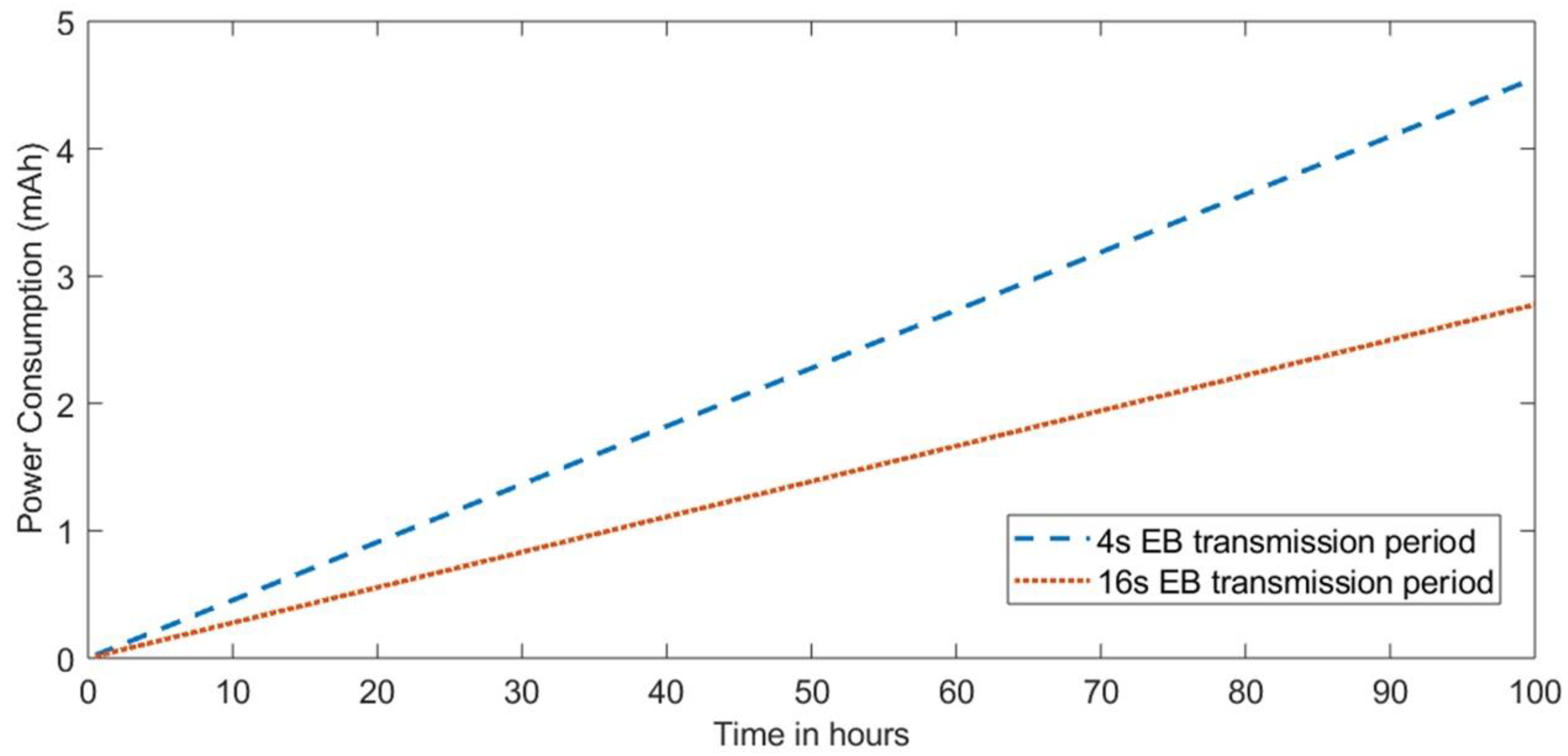
| TSCH | Fixed EB Transmission Time (EBTT) | {16,4} s |
| EB Transmission Time based on Trickle Timer | RPL Trickle Timer | |
| Custom Trickle Timer | A 4-s period during the first two minutes and then a 16-s period | |
| Number of Channels and Scan Channels (NC, NSC) | 4 channels | |
| Extra Test: Different DIS interval values | ||
| RPL | DIS interval (DISTT) | {60,45,30,15,5} s |
| Description | Time TX Mode (ms) | Current Consumption (TX) (mA) | Time RX Mode (ms) | Current Consumption (RX) (mA) | Power Consumption (mAs) |
|---|---|---|---|---|---|
| Broadcast TX slot power consumption | 4.256 | 17.4 | - | 19.7 | 0.0740544 |
| Unicast TX slot power consumption | 4.256 | 2.4 (ACK) | 0.1213344 | ||
| Broadcast RX slot power consumption | - | 5.452 | 0.1074044 | ||
| Unicast RX slot power consumption | 2.4 (ACK) | 5.452 | 0.1491644 | ||
| RX slot without packet reception | - | 2.2 | 0.04334 | ||
| Scan phase | - | 10 | 0.197 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vera-Pérez, J.; Todolí-Ferrandis, D.; Santonja-Climent, S.; Silvestre-Blanes, J.; Sempere-Payá, V. A Joining Procedure and Synchronization for TSCH-RPL Wireless Sensor Networks. Sensors 2018, 18, 3556. https://doi.org/10.3390/s18103556
Vera-Pérez J, Todolí-Ferrandis D, Santonja-Climent S, Silvestre-Blanes J, Sempere-Payá V. A Joining Procedure and Synchronization for TSCH-RPL Wireless Sensor Networks. Sensors. 2018; 18(10):3556. https://doi.org/10.3390/s18103556
Chicago/Turabian StyleVera-Pérez, Jose, David Todolí-Ferrandis, Salvador Santonja-Climent, Javier Silvestre-Blanes, and Víctor Sempere-Payá. 2018. "A Joining Procedure and Synchronization for TSCH-RPL Wireless Sensor Networks" Sensors 18, no. 10: 3556. https://doi.org/10.3390/s18103556
APA StyleVera-Pérez, J., Todolí-Ferrandis, D., Santonja-Climent, S., Silvestre-Blanes, J., & Sempere-Payá, V. (2018). A Joining Procedure and Synchronization for TSCH-RPL Wireless Sensor Networks. Sensors, 18(10), 3556. https://doi.org/10.3390/s18103556