Positioning Performance of BDS Observation of the Crustal Movement Observation Network of China and Its Potential Application on Crustal Deformation


Abstract
:1. Introduction
2. Materials and Methods
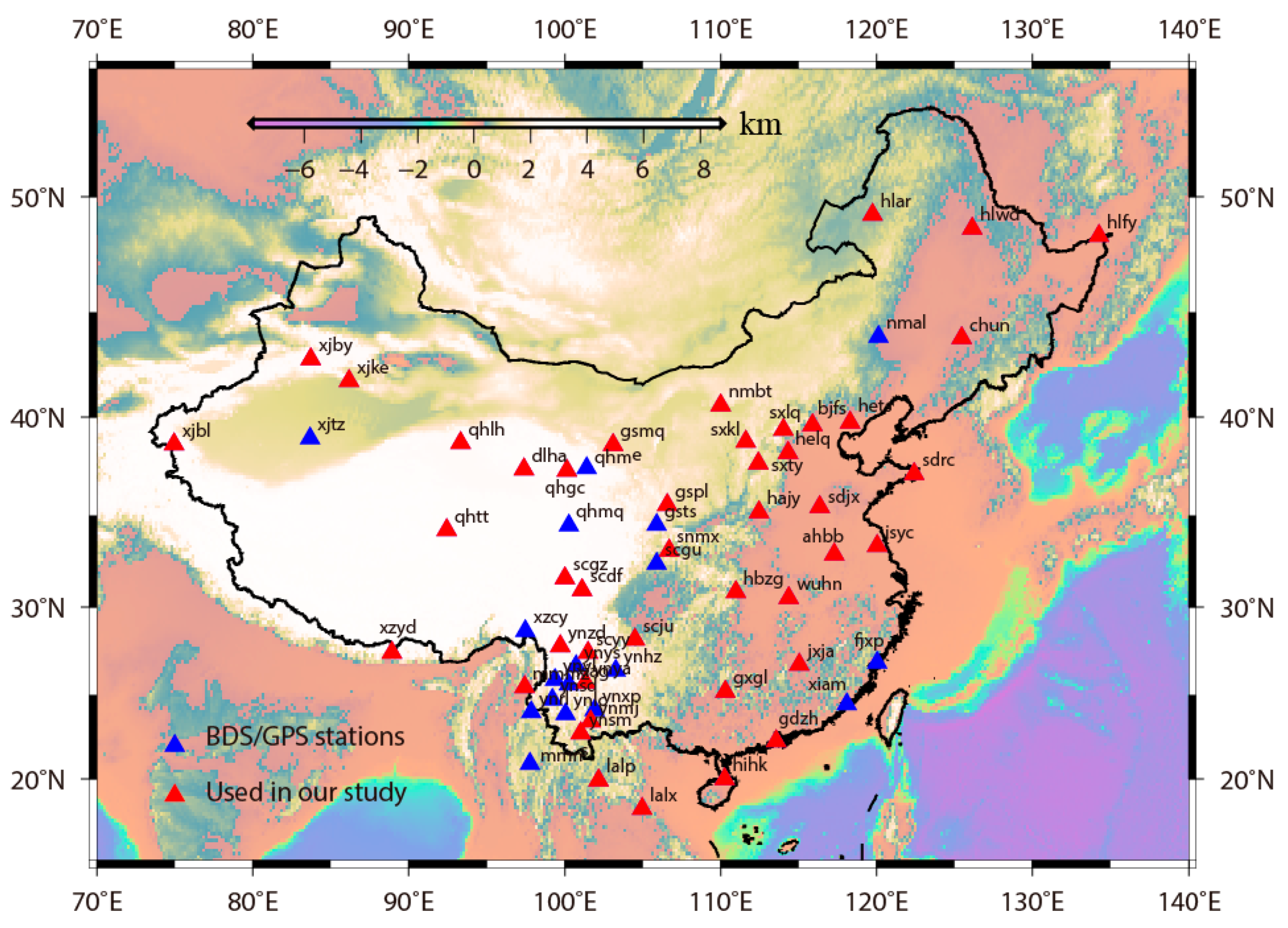
2.1. BDS and GPS Data
2.2. Data Processing Strategy
3. Results
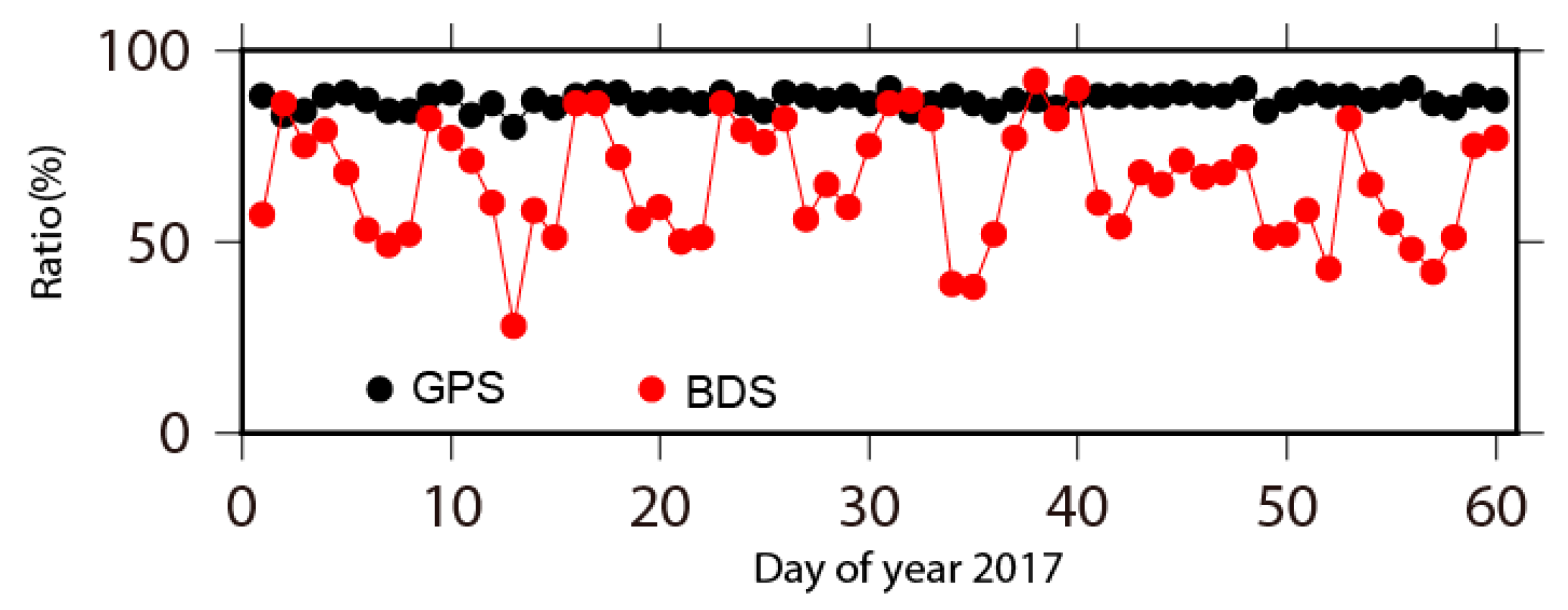
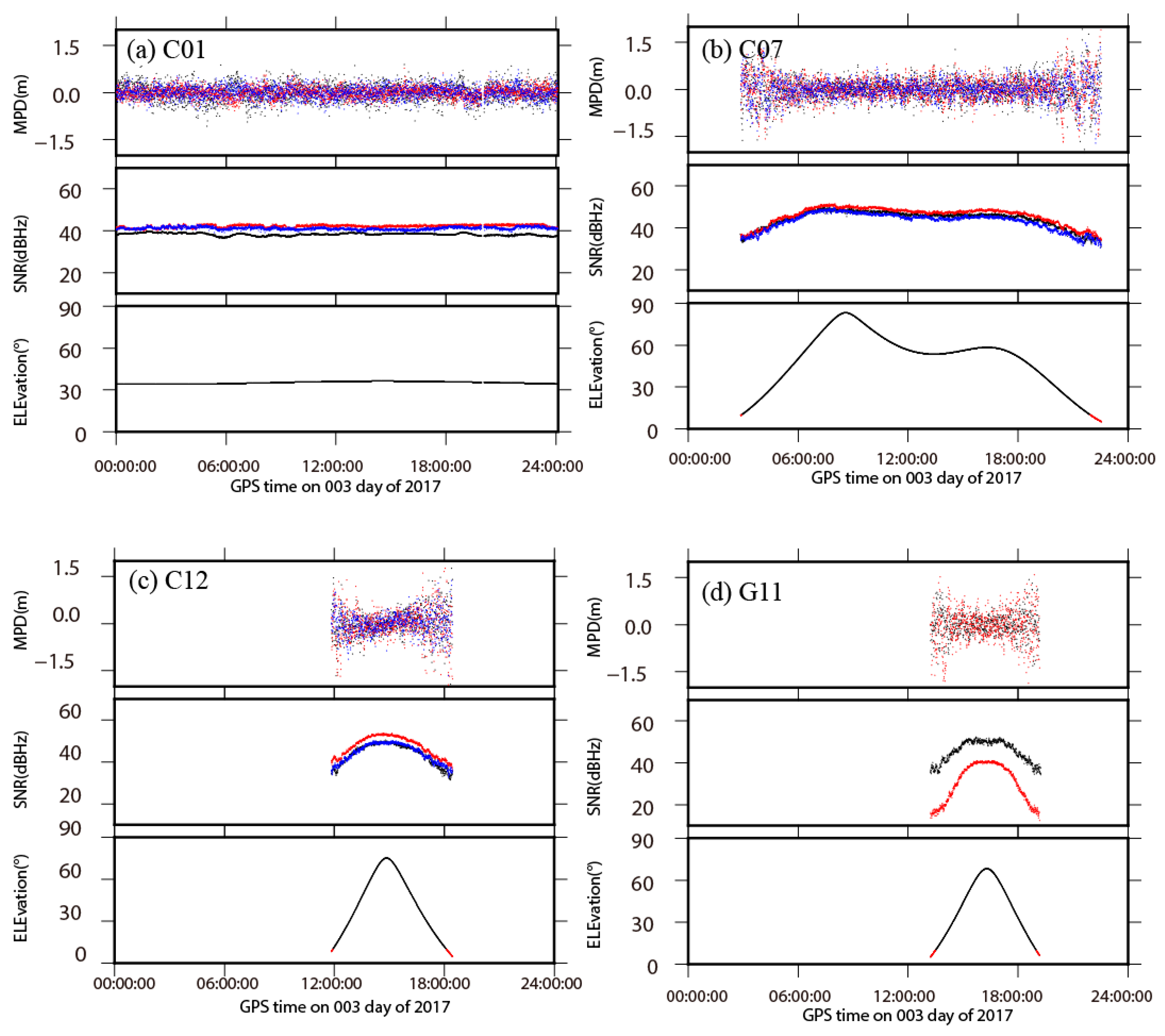
3.1. Quality Analysis of BDS Observations
3.2. The RMS of Station Residual Position Time Series
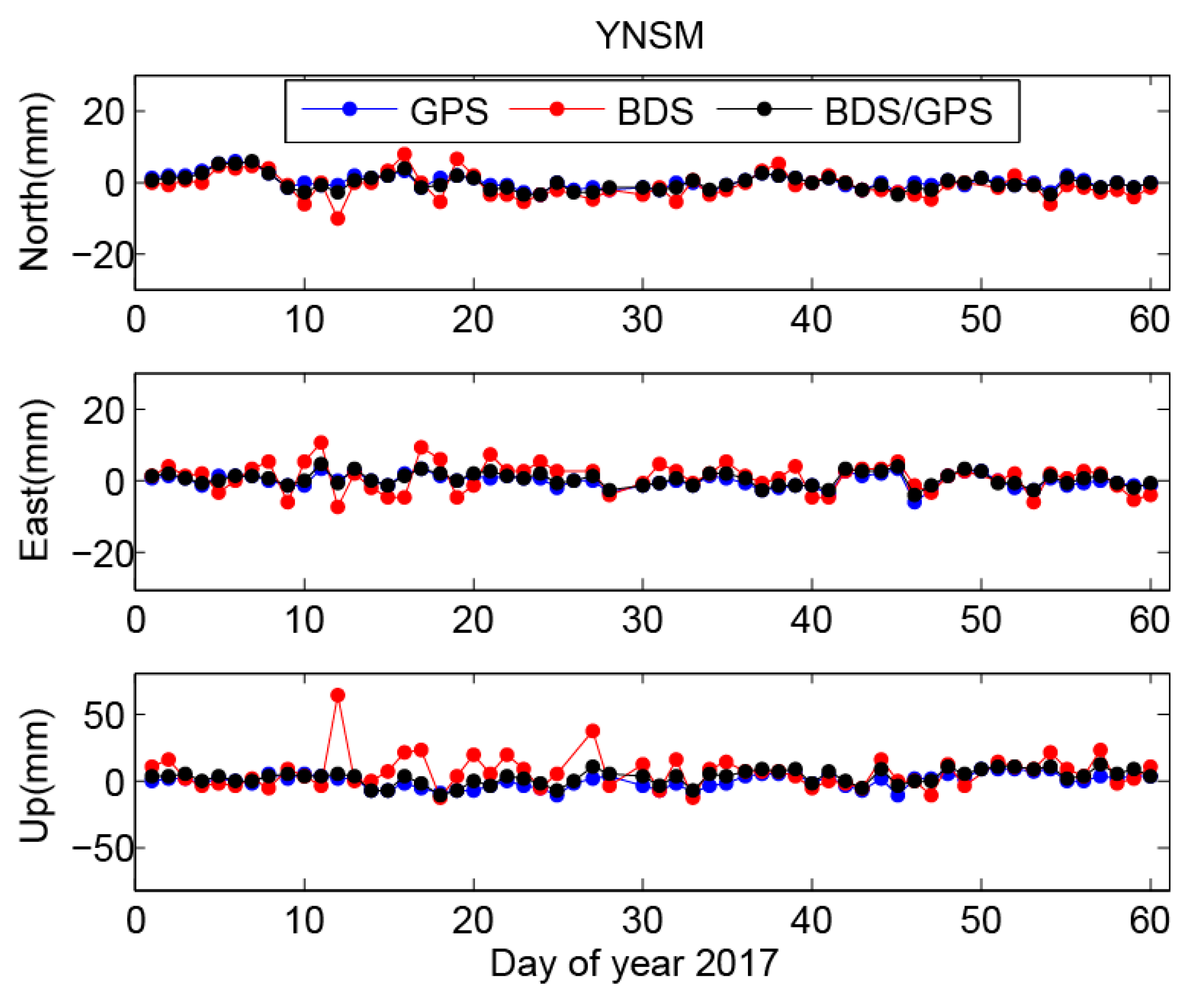
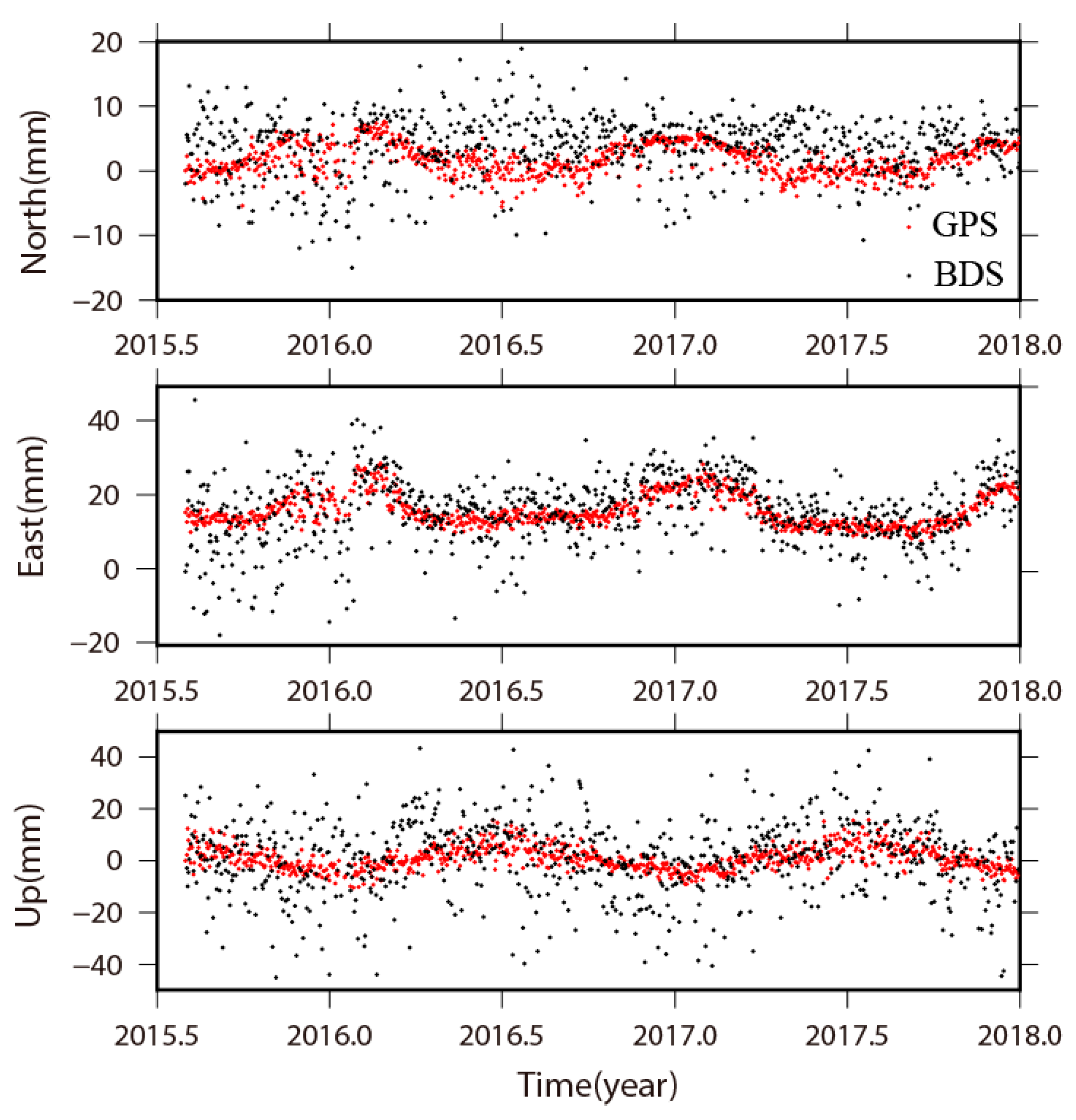
3.3. Differences Between BDS and GPS Position Time Series
3.4. The Spatial Distribution of Differences Between BDS and GPS Positioning Results
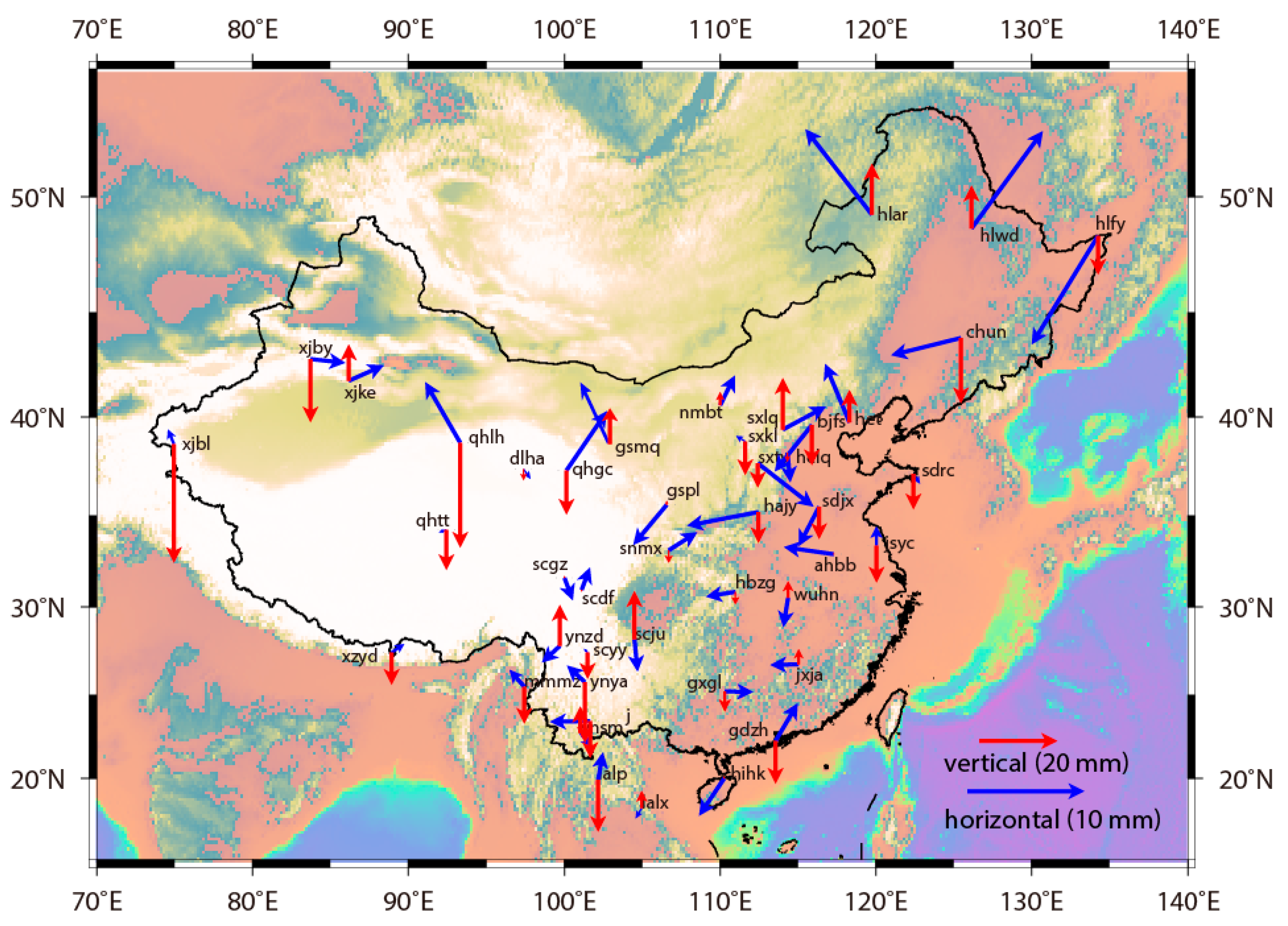
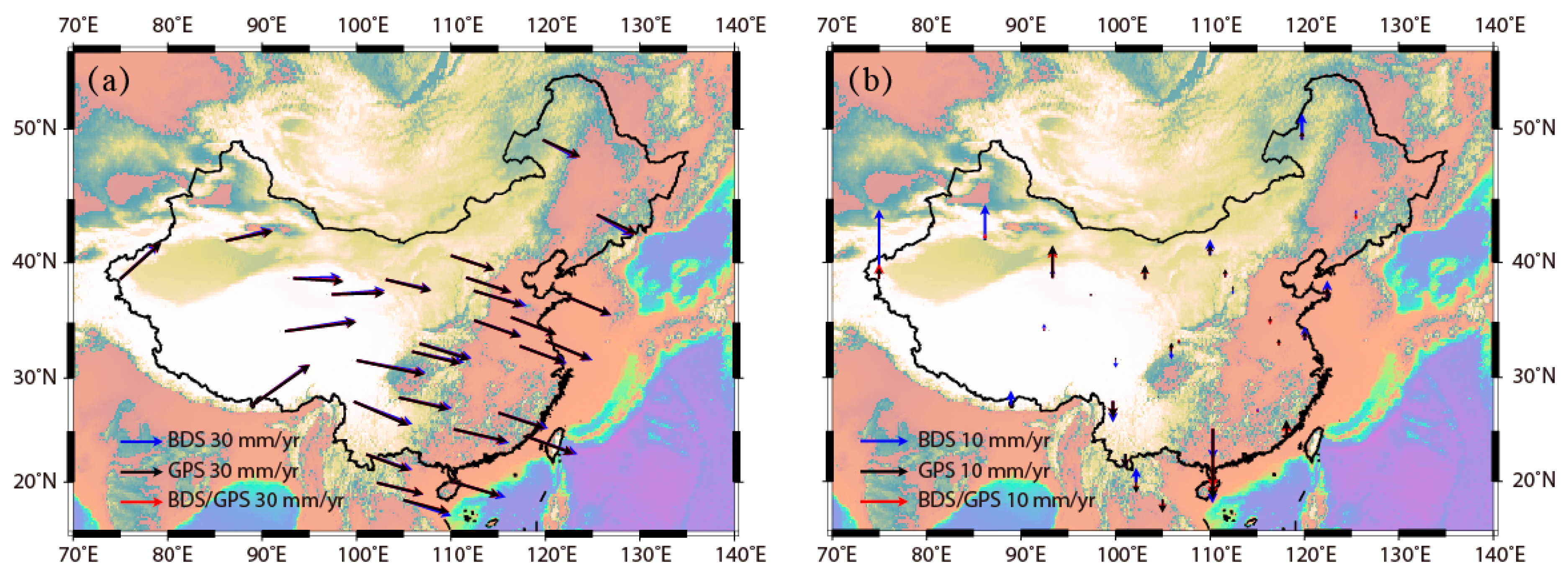
3.5. The Three-Dimensional Velocity and Its Accuracy Deduced by BDS and GPS Observations, Respectively
4. Discussion
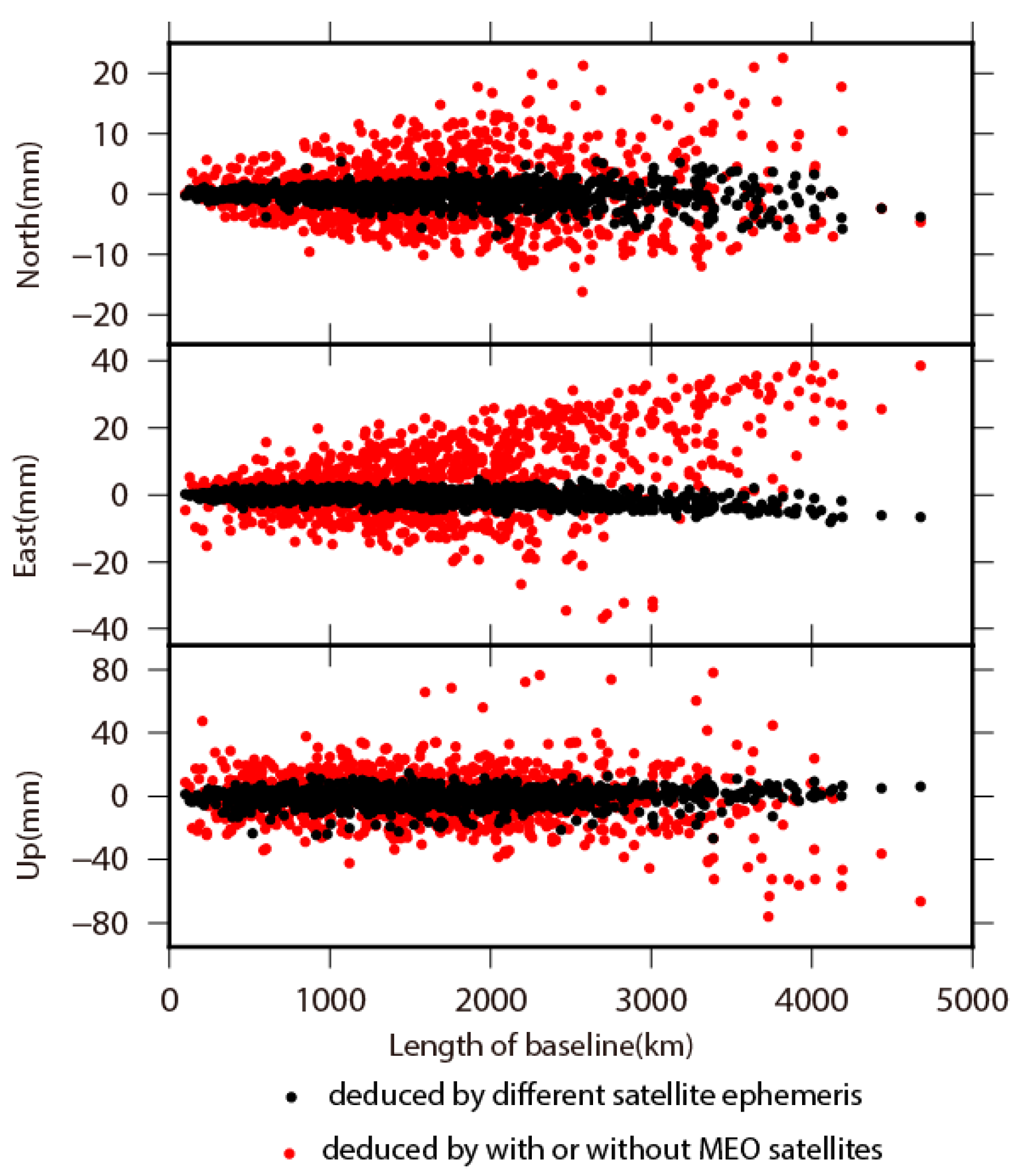
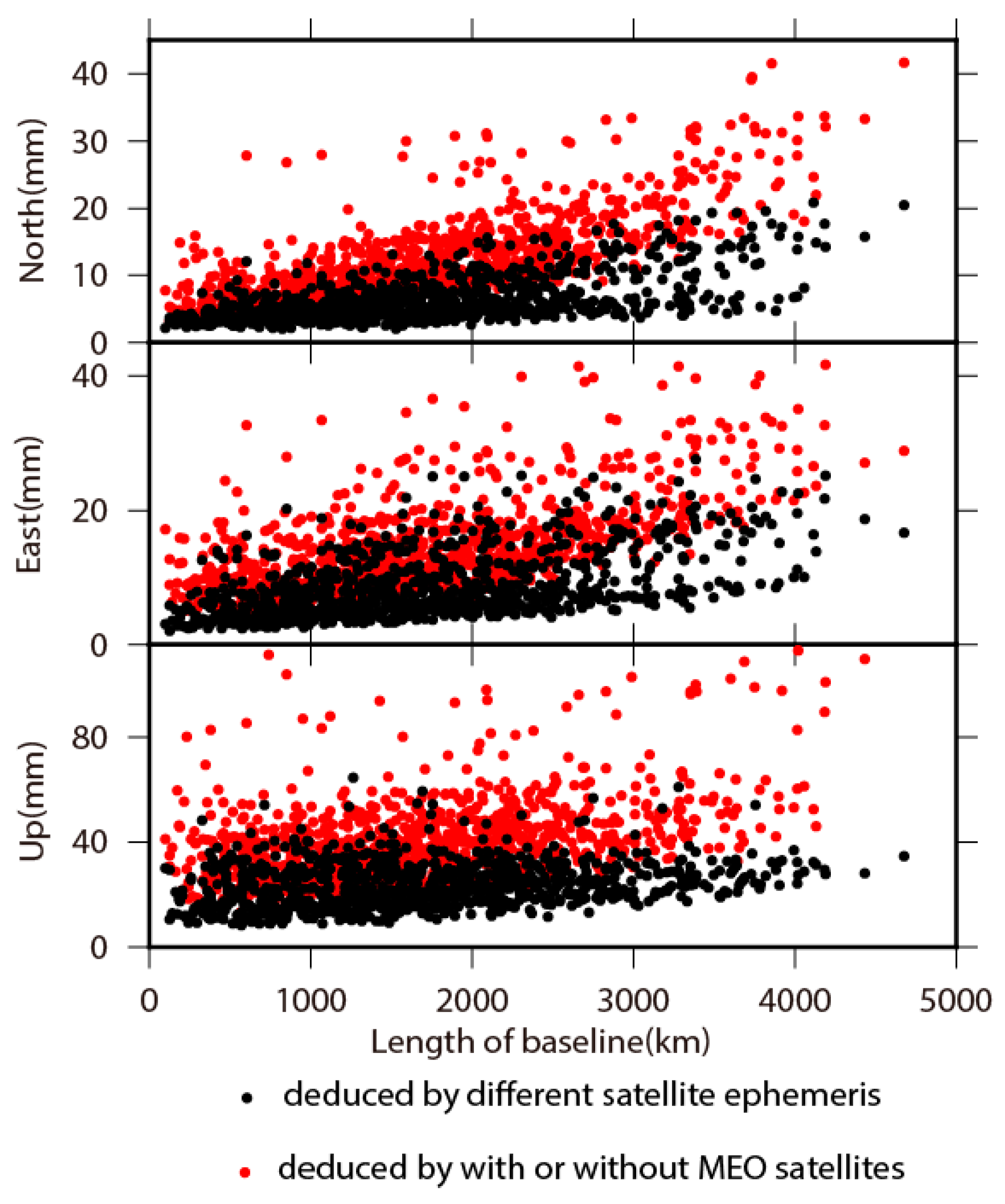
4.1. Influence of Satellite Orbit Accuracy on Positioning Performance
4.2. Influence of BDS MEO Satellites Distribution on Positioning performance
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Han, C.H.; Yang, Y.X.; Cai, Z.W. BeiDou navigation satellite system and its timescales. Metrologia 2011, 48, S213–S218. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Sleewaegen, J.M.; Huisman, L.; Teunissen, P.G.J. Characterization of COMPASS M-1 signals. GPS Solut. 2012, 16, 117–126. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- Shi, C.; Zhao, Q.L.; Hu, Z.G.; Liu, J.N. Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites. GPS Solut. 2013, 17, 103–119. [Google Scholar] [CrossRef]
- Li, X.X.; Zhang, X.H.; Ren, X.D.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite System: GPS, GLONASS, Galileo and Beidou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Gao, F.; Xu, T.H.; Wang, N.Z.; Jiang, C.H.; Du, Y.J.; Nie, W.F.; Xu, G.C. Spatiotemporal evaluation of GNSS-R based on future fully operational global multi-GNSS and Eight-LEO constellations. Remote Sens. 2018, 10, 67. [Google Scholar] [CrossRef]
- Jin, S.G.; Qian, X.D.; Wu, X. Sea level change from BeiDou Navigation Satellite System-Reflectometry (BDS-R): first results and evaluation. Glob. Planet. Chang. 2017, 49, 20–25. [Google Scholar] [CrossRef]
- Padokhin, A.M.; Tereshin, N.A.; Yasyukevich, Y.V.; Andreeva, E.S.; Nazarenko, M.O.; Yasyukevich, A.S.; Kozlovtseva, E.A.; Kurbatov, G.A. Application of BDS-GEO for studying TEC variability in equatorial ionosphere on different time scales. Adv. Space Res. 2018. [Google Scholar] [CrossRef]
- Yang, Y.X.; Li, J.L.; Wang, A.B.; Xu, J.Y.; He, H.B.; Guo, H.R.; Shen, J.F.; Dai, X. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system. Sci. China Earth Sci. 2014, 57, 144–152. (In Chinese) [Google Scholar] [CrossRef]
- Chen, K.J.; Zamora, N.; Babeyko, A.Y.; Li, X.X.; Ge, M.R. Precise positioning of BDS, BDS/GPS: implications for tsunami early warning in south china sea. Remote Sens. 2015, 7, 15955–15968. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.S.; Yuan, H.; Zhou, K. Validation and analysis of the performance of dual-frequency single-epoch BDS/GPS/GLONASS relative positioning. Chin. Sci. Bull. 2015, 60, 857–868. (In Chinese) [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X.H.; Wang, J.L.; Ren, X.S. Modeling and assessment of triple-frequency BDS precise point positioning. J. Geod. 2016, 90, 1–13. [Google Scholar] [CrossRef]
- Tang, W.M.; Cui, J.H.; Hui, M.T. Analysis of the impact if Beidou regional constellation on relative positioning accuary. Geomat. Inf. Sci. Wuhan Univ. 2016, 41, 1107–1112. (In Chinese) [Google Scholar] [CrossRef]
- Shi, C.; Wei, N.; Li, M.; Song, W.W.; Lou, Y.D.; Niu, Y.J. Approaches to realize and maintain national terrestrial reference frame based on BDS data. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 1635–1643. (In Chinese) [Google Scholar] [CrossRef]
- Liang, S.M.; Gan, W.J.; Shen, C.Z.; Xiao, G.R.; Liu, J.; Chen, W.T.; Ding, X.G.; Zhou, D.M. Three-dimensional velocity field of present-day crustal motion of the Tibetan Plateau derived from GPS measurements. J. Geophys. Res. 2013, 118, 5722–5732. [Google Scholar] [CrossRef] [Green Version]
- Zheng, G.; Wang, H.; Wright, T.J.; Lou, Y.D.; Zhang, R.; Zhang, W.W.; Shi, C.; Huang, J.F.; Wei, N. Crustal deformation in the India-Eurasia collision zone from 25 years of GPS measurements. J. Geophys. Res. 2017. [Google Scholar] [CrossRef]
- Li, X.X.; Li, X.; Yuan, Y.Q.; Zhang, K.K.; Zhang, X.H.; Wickert, J. Multi-GNSS phase delay estimation and PPP ambiguity resolution: GPS, BDS, GLONASS, Galileo. J. Geodesy 2017, B4, 1–30. [Google Scholar] [CrossRef]
- Zhang, X.H.; Tao, X.L.; Zhu, F.; Shi, X.; Wang, F.H. Quality assessment of GNSS observations from an Andriod N smartphone and positioning performance analysis using time differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Herring, T.A.; King, R.W.; Floyd, M.A.; McClusky, S.C. GAMIT Reference Manual, version 10.6.; Massachusetts Institute of Technology: Cambridge, MA, USA, 2015; Available online: http://www-gpsg.mit.edu/~simon/gtgk/GAMIT_Ref.pdf (accessed on 16 June 2015).
- Herring, T.A.; King, R.W.; Floyd, M.A.; McClusky, S.C. GLOBK Reference Manual, version 10.6.; Massachusetts Institute of Technology: Cambridge, MA, USA, 2015; Available online: http://geoweb.mit.edu/gg/GLOBK_Ref.pdf (accessed on 16 June 2015).
- Petrie, E.J. Modelling Higher-Order Ionospheric Effects on Global GPS Solutions. Ph.D. Thesis, University of Newcastle upon Tyne, Newcastle, UK, December 2010. [Google Scholar]
- Zus, F.; Dick, G.; Dousa, J.; Wickert, J. Systematic errors of mapping functions which are based on the VMF1 concept. GPS Solut. 2015, 19, 277–286. [Google Scholar] [CrossRef]
- Tian, Y.J.; Zhao, D.Q.; Chai, H.Z.; Wang, S. BDS ambiguity resolution with the modified TCAR method for medium-long baseline. Adv. Space Res. 2017, 59, 670–681. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Metivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. 2016, 121, 6108–6131. [Google Scholar] [CrossRef]
- Nikolaidis, R. Observation of Geodetic and Seismic Deformation with the Global Positioning System. Ph.D. Thesis, University of California, San Diego, CA, USA, January 2002. [Google Scholar]
- Zhang, J.; Bock, Y.; Johnson, H.; Fang, P.; Williams, S.; Genrich, J.; Wdowinski, S.; Behr, J. Southern California permanent GPS geodetic array: error analysis of daily position estimates and site velocities. J. Geophys. Res. 1997, 102, 18035–18055. [Google Scholar] [CrossRef]
- Williams, S.D.P.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error analysis of continuous GPS position time series. J. Geophys. Res. 2004, 109, B03412. [Google Scholar] [CrossRef]
- Klos, A.; Olivares, G.; Teferle, F.N.; Hunegnaw, A.; Bogusz, J. On the combined effect of periodic signals and colored noise on velocity uncertainties. GPS Solut. 2018, 22, 1. [Google Scholar] [CrossRef]
- Bos, M.S.; Fernandes, R.M.S.; Williams, S.D.P.; Bastos, L. Fast error analysis of continuous GNSS observations with missing data. J. Geodesy 2013, 87, 351–360. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of code bias variations of BDS triple-frequency signals and their impacts on ambiguity resolution for long baselines. GPS Solut. 2017, 21, 177–186. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Liu, W. Mitigating Beidou satellite-induced code bias: Taking into account the stochastic model of corrections. Sensors 2016, 16, 909. [Google Scholar] [CrossRef] [PubMed]
- Zou, X.; Li, Z.; Li, M.; Tang, W.; Deng, C.; Chen, L.; Wang, C.; Shi, C. Modeling BDS pseudorange variations and models assessment. GPS Solut. 2017, 21, 1661–1668. [Google Scholar] [CrossRef]
- Fu, J.; Li, G.; Wang, L. An improved BeiDou-2 satellite-induced code bias estimation method. Sensors 2018, 18, 1354. [Google Scholar] [CrossRef] [PubMed]
- Cai, C.L.; Li, X.H.; Wu, H.T. Analysis of the DOP and Positioning Performance of Composite Satellite Constellation. Sci. Survey. Mapp. 2009, 34, 67–69. (In Chinese) [Google Scholar]
- Jing, Y.F.; Yang, Y.X.; Zeng, A.M.; Ming, F. Latitude effect in positioning performance by using BeiDou Regional Satellite Navigation System. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 1243–1248. (In Chinese) [Google Scholar] [CrossRef]
- Shi, C.; Zhao, Q.L.; Li, M.; Tang, W.M.; Hu, Z.G.; Lou, Y.D.; Zhang, H.P.; Niu, X.J.; Liu, J.N. Precise orbit determination of Beidou Satellites with precise positioning. Sci. China. Earth. Sci. 2012, 55, 1079–1086. (In Chinese) [Google Scholar] [CrossRef]
- Ge, M.R.; Zhang, H.P.; Jia, X.L.; Song, S.L.; Wickert, J. What Is achievable with the current compass constellation? GPS World 2012, 11, 29–34. [Google Scholar]
- Zhao, Q.L.; Guo, J.; Li, M.; Qu, L.Z.; Hu, Z.G.; Shi, C.; Liu, J.N. Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J. Geodesy 2013, 87, 475–486. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | North (mm) | East (mm) | Up (mm) |
|---|---|---|---|
| BDS | 6.1 | 7.1 | 22.1 |
| GPS | 2.8 | 2.9 | 5.8 |
| BDS/GPS | 2.4 | 2.2 | 5.0 |
| Title | North (mm) | East (mm) | Up (mm) |
|---|---|---|---|
| mean | −0.8 | −1.5 | −5.5 |
| RMS | 6.8 | 7.3 | 21.7 |
| Satellite | North (mm/year) | East (mm/year) | Up (mm/year) |
|---|---|---|---|
| BDS | 1.2 | 1.5 | 4.1 |
| GPS | 0.3 | 0.3 | 0.7 |
| Title | North (mm) | East (mm) | Up (mm) | |||
|---|---|---|---|---|---|---|
| Mean | RMS | Mean | RMS | Mean | RMS | |
| Different satellite ephemeris | −0.1 | 6.3 | −0.7 | 7.6 | −0.5 | 23.5 |
| With and without MEO satellites | 0.4 | 12.0 | 5.1 | 14.1 | 0.0 | 42.9 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, X.; Meng, G.; Sun, H.; Wu, W. Positioning Performance of BDS Observation of the Crustal Movement Observation Network of China and Its Potential Application on Crustal Deformation. Sensors 2018, 18, 3353. https://doi.org/10.3390/s18103353
Su X, Meng G, Sun H, Wu W. Positioning Performance of BDS Observation of the Crustal Movement Observation Network of China and Its Potential Application on Crustal Deformation. Sensors. 2018; 18(10):3353. https://doi.org/10.3390/s18103353
Chicago/Turabian StyleSu, Xiaoning, Guojie Meng, Haili Sun, and Weiwei Wu. 2018. "Positioning Performance of BDS Observation of the Crustal Movement Observation Network of China and Its Potential Application on Crustal Deformation" Sensors 18, no. 10: 3353. https://doi.org/10.3390/s18103353