A General Framework for 3-D Parameters Estimation of Roads Using GPS, OSM and DEM Data


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. 3-D Modeling
2.1. Formatting of the Dynamics Equation
2.2. Formatting the Measurement Equations
2.2.1. GPS Readings
- for the GPS unit #1, is the linear measurement function:
- for the GPS unit #2, is the nonlinear measurement function:
2.2.2. OSM Road Network
2.2.3. ASTER GDEM2 Terrain Surface
3. Estimation of the Road Inclination
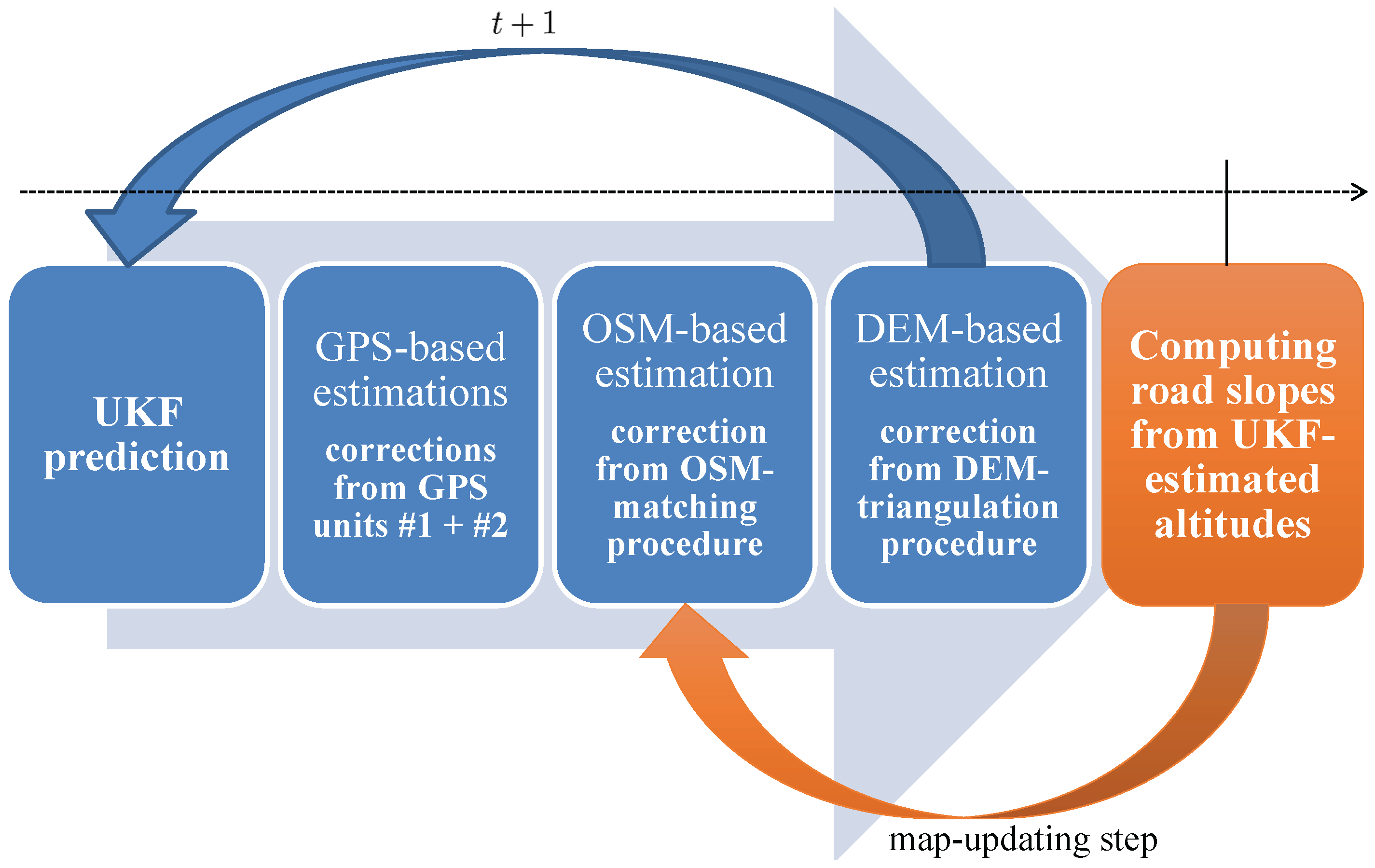
3.1. Dynamics Sampling: Prediction
3.2. Correction: General Principles
3.3. Correction: Proposed Solution
3.3.1. Correction from GPS Sensors
3.3.2. Correction from the OSM Database
3.3.3. Correction from DEM Database
3.4. Road Slope Computing
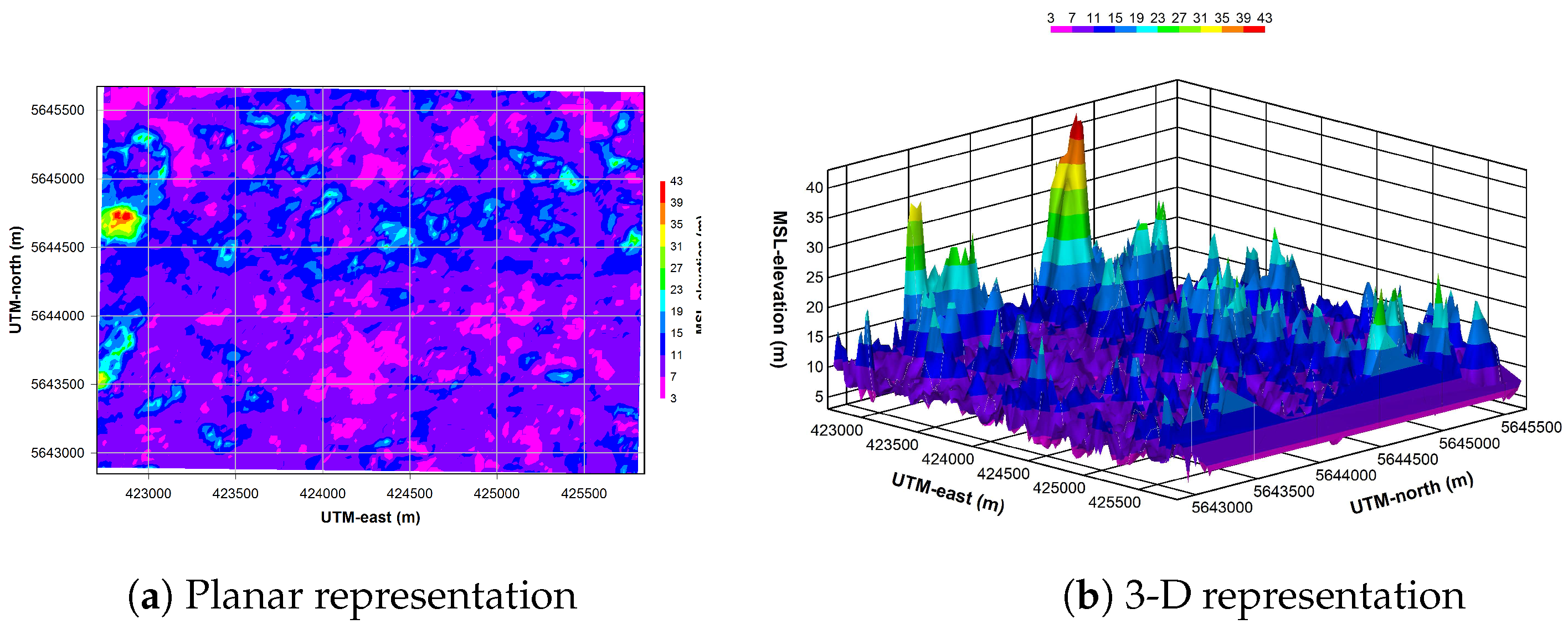
4. New Modeling of DEM Data
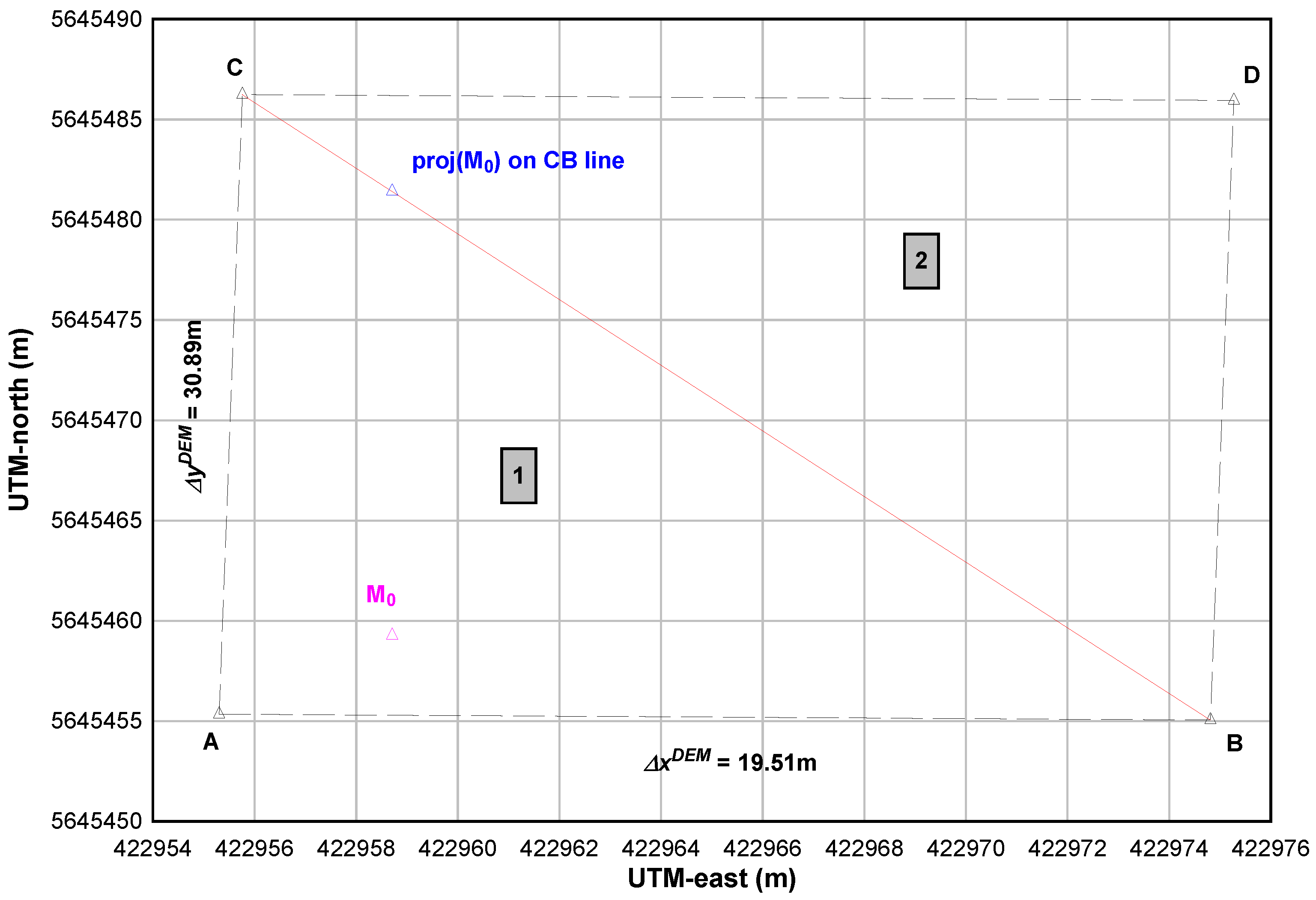
4.1. Triangulation of the DEM
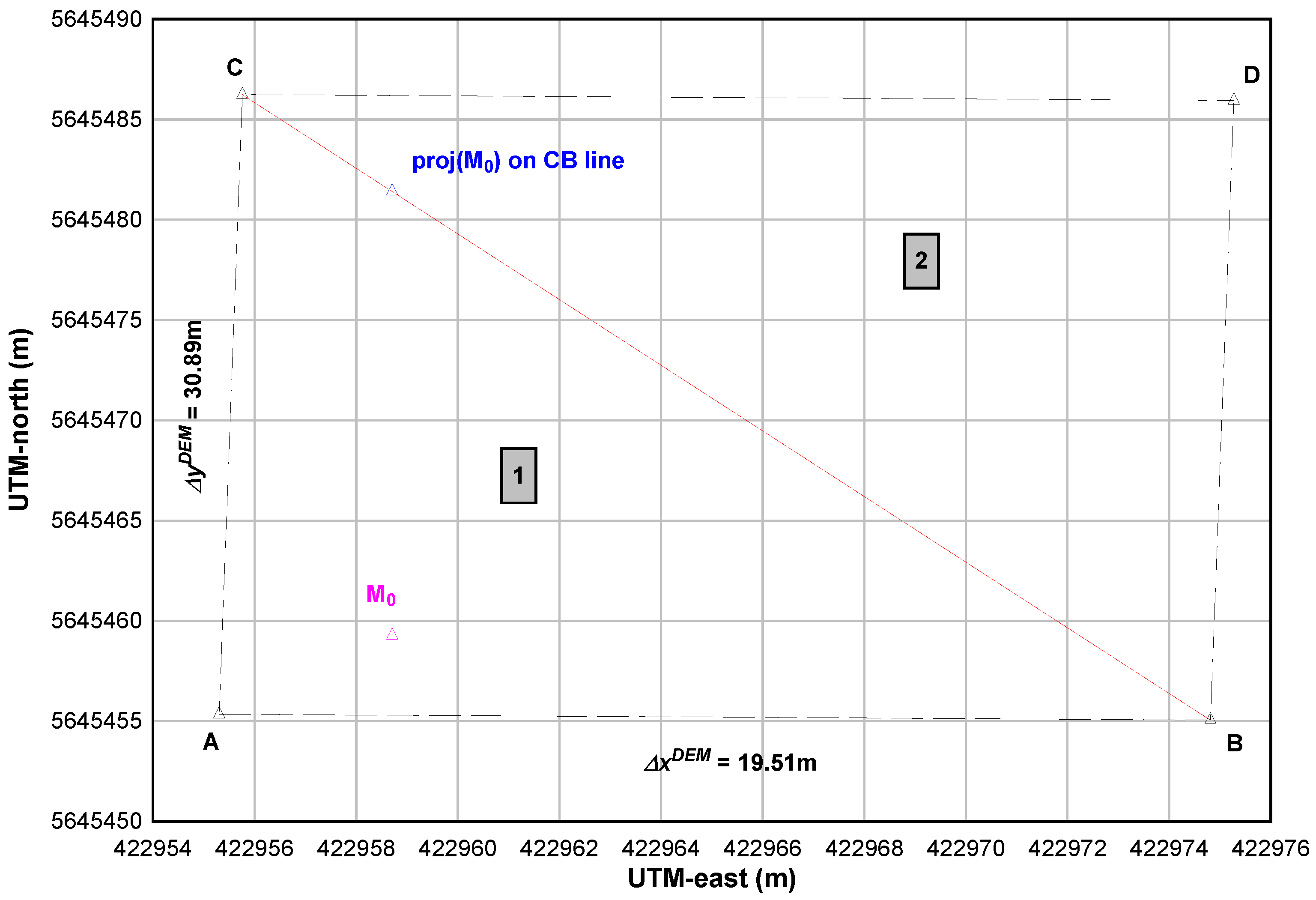
4.2. Identification of the Relevant Triangle and Computation of the MSL-Elevation
5. Experimental Framework
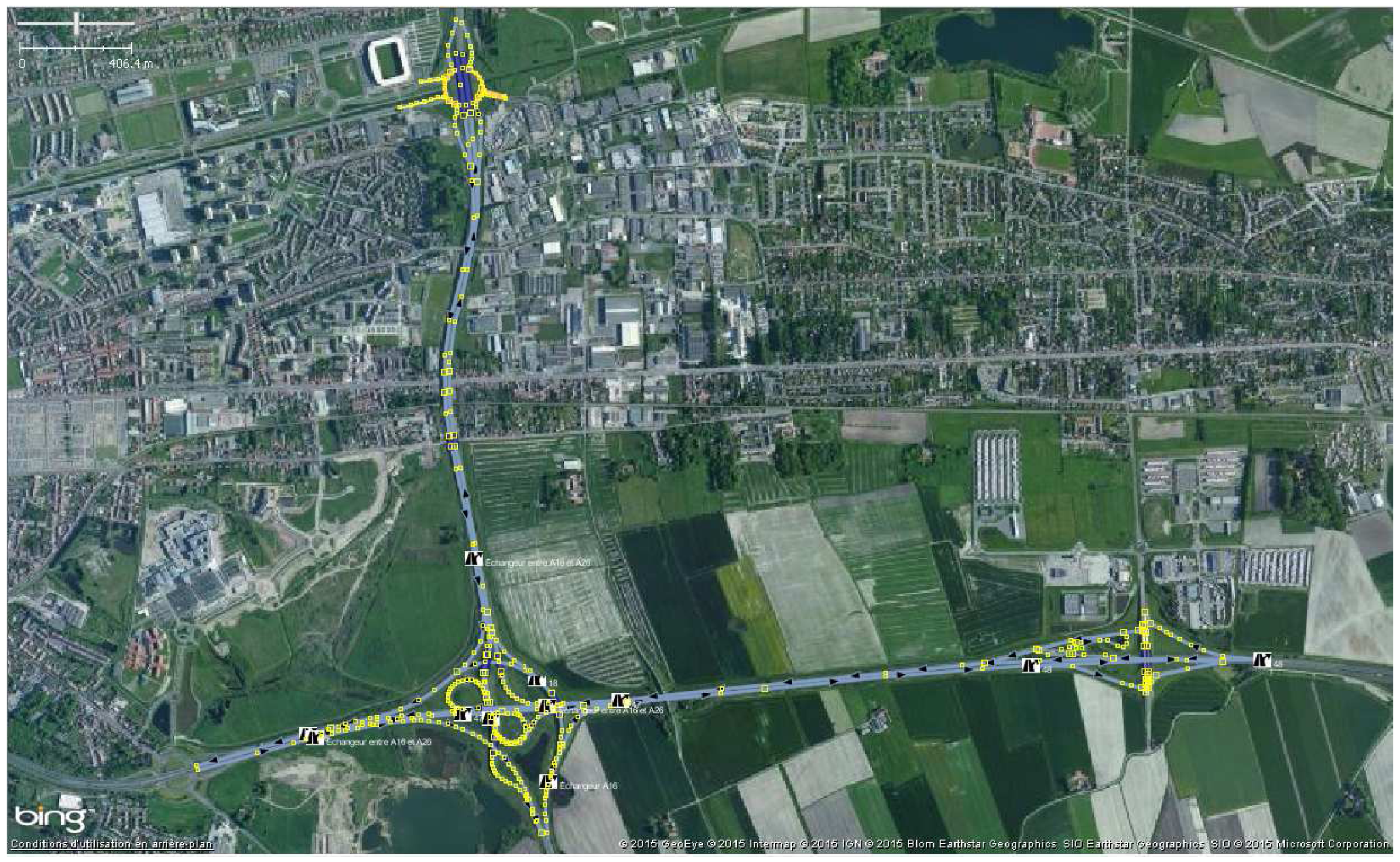
5.1. Scenario Context
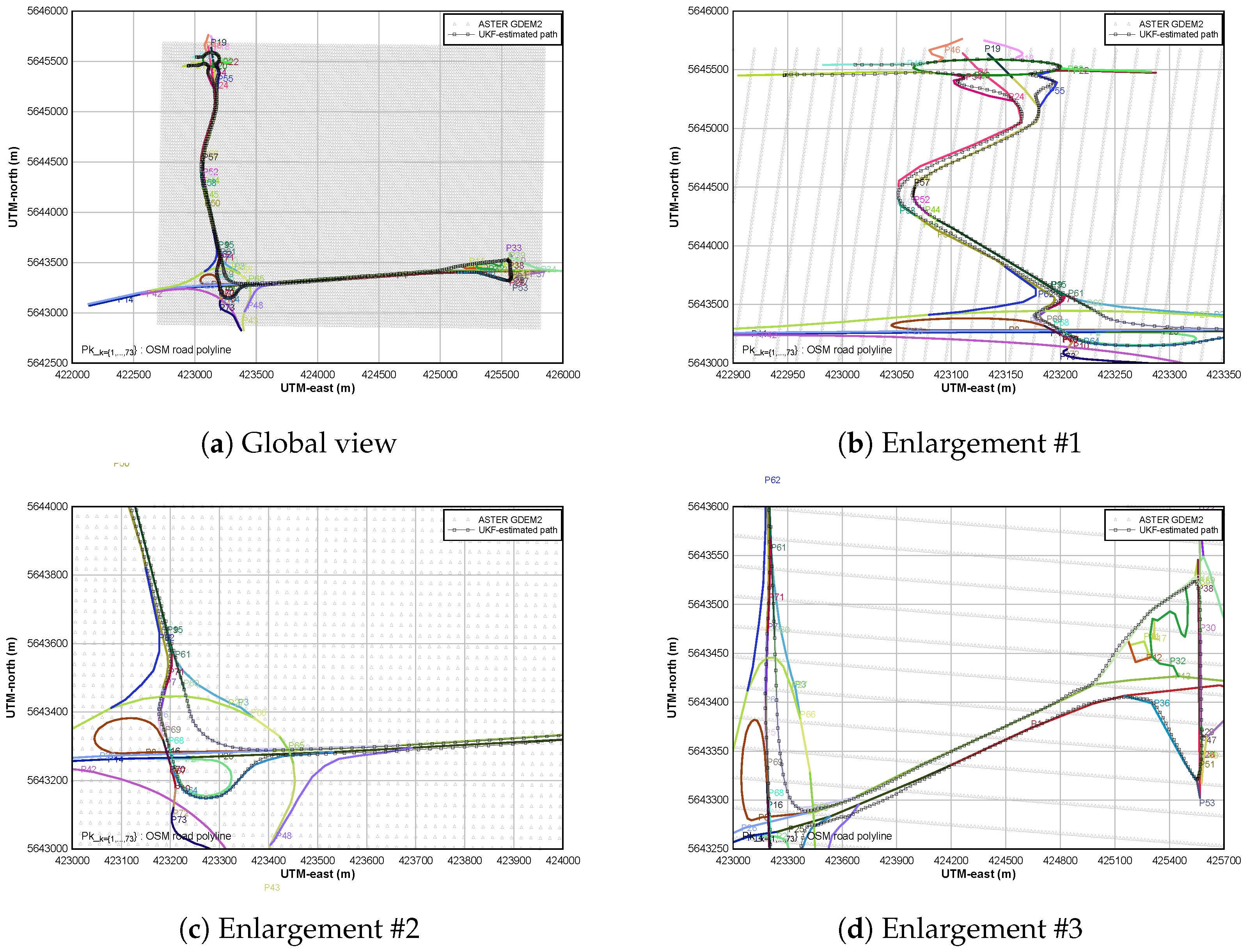
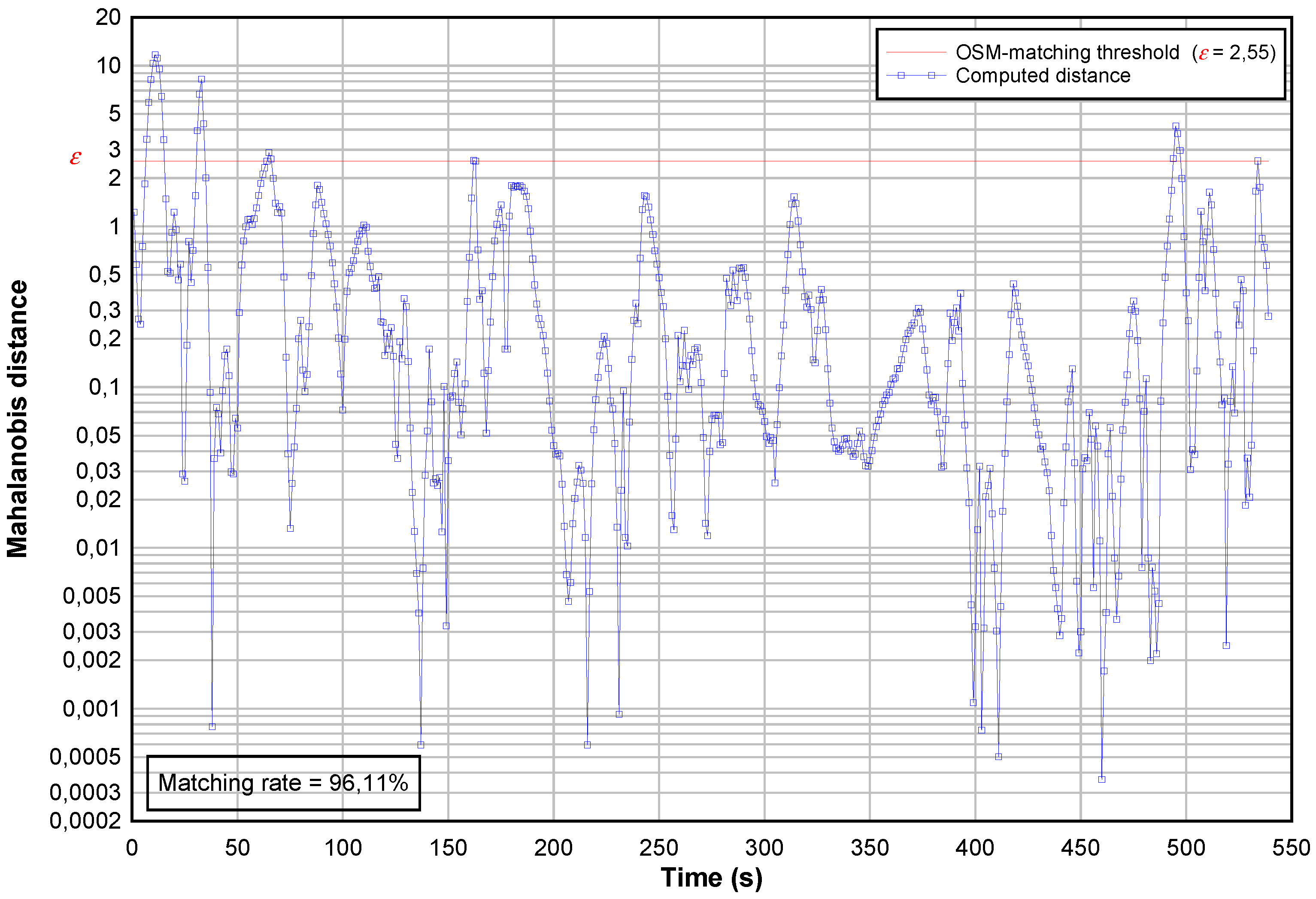
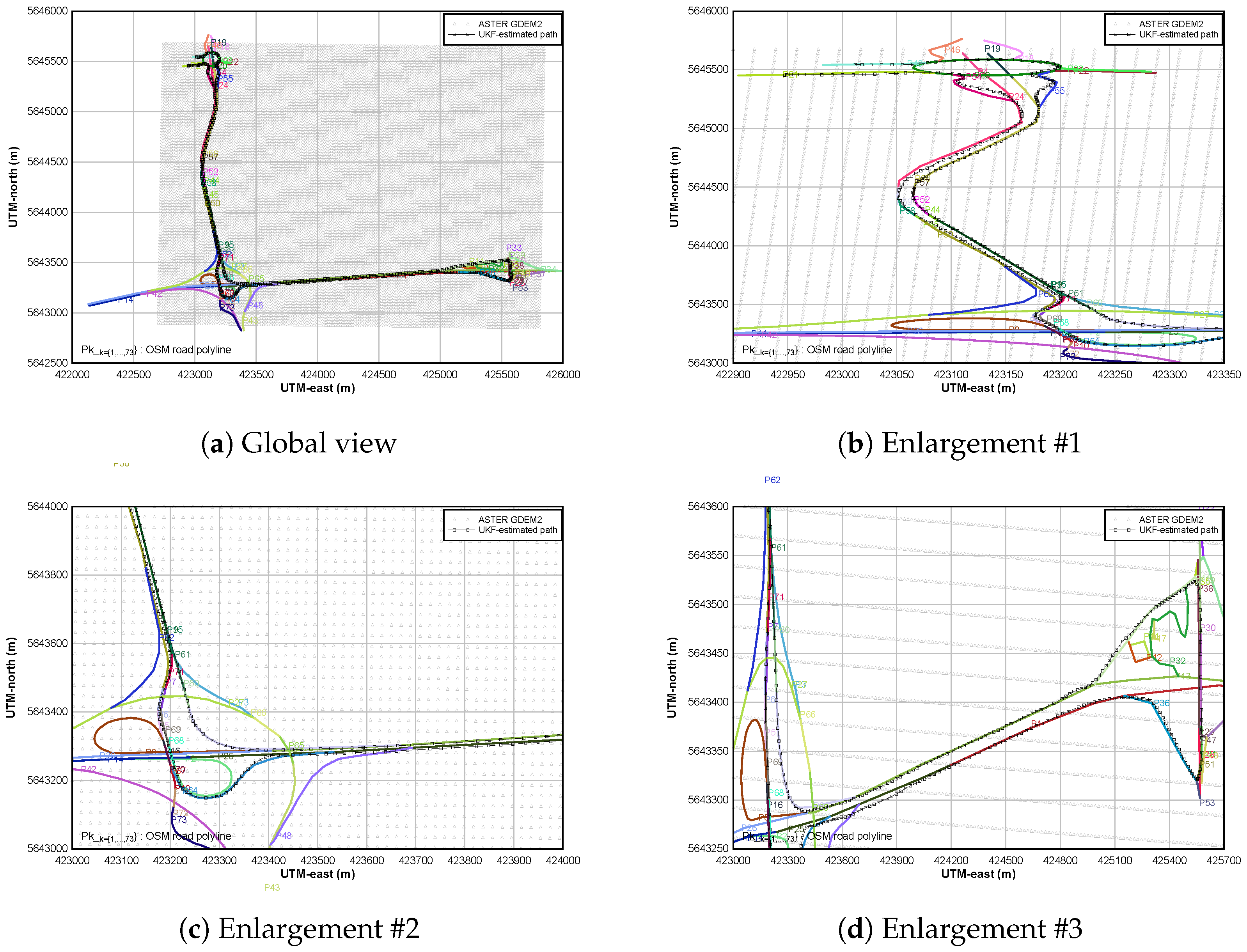
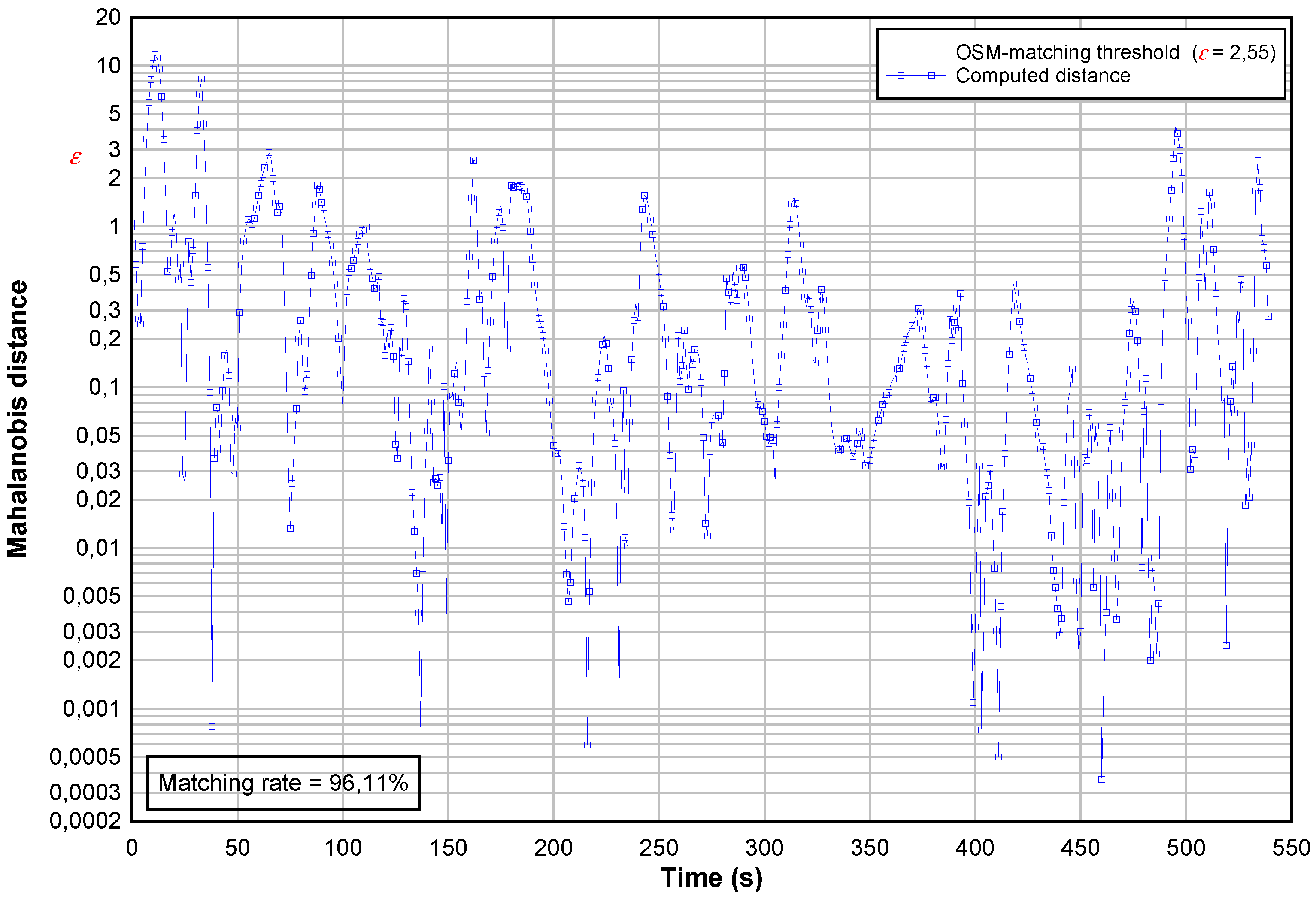
5.2. Map-Matching Procedure
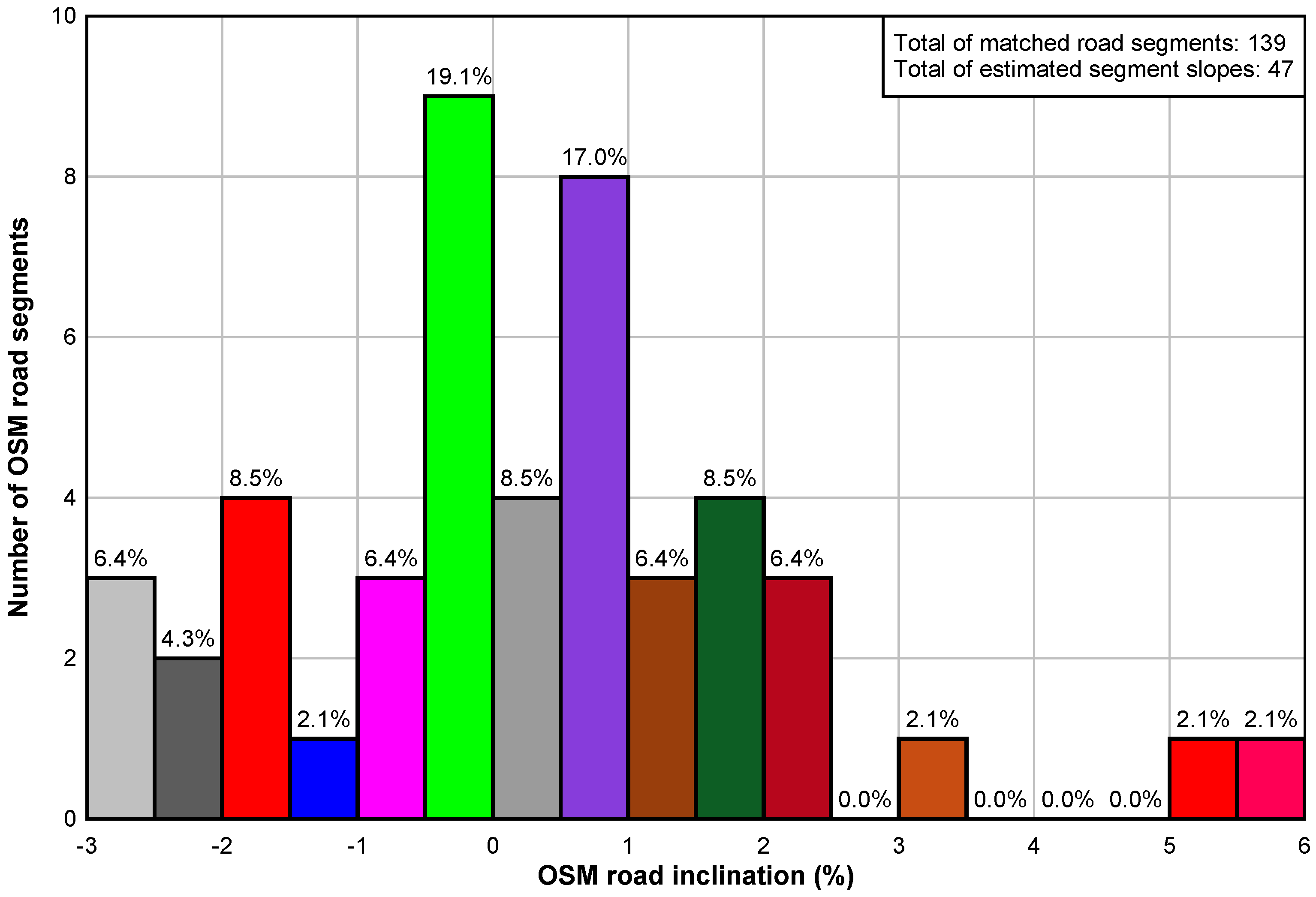
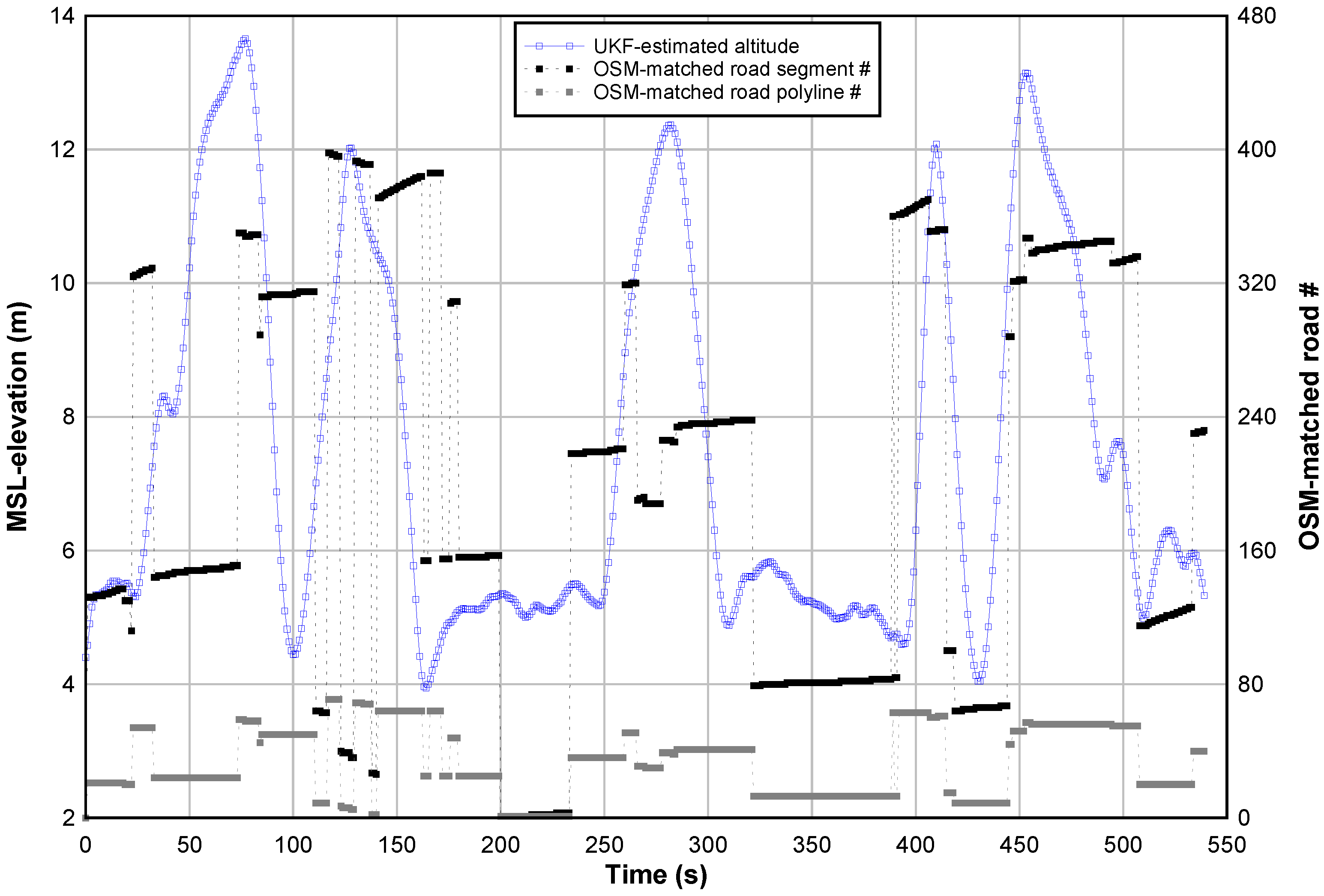
5.3. Road Inclination Estimation
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Kaul, M.; Yang, B.; Jensen, C. Building Accurate 3D Spatial Networks to Enable Next Generation Intelligent Transportation Systems. Proceedigns of the 2013 IEEE 14th International Conference on Mobile Data Management (MDM), Milan, Italy, 3–6 June 2013; Volume 1, pp. 137–146. [Google Scholar]
- Bennet, J. OpenStreetMap; Packt Publishing Limited: Birmingham, UK, 2010. [Google Scholar]
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Fathi, A.; Krumm, J. Detecting Road Intersections from GPS Traces. In Proceedings of the 6th International Conference on Geographic Information Science (GIScience), Zurich, Switzerland, 14–17 September 2010. [Google Scholar]
- Boucher, C.; Noyer, J.C. Dual-GPS Fusion for Automatic Enhancement of Digital OSM Roadmaps. In Proceedings of the IEEE AESS European Conference on Satellite TELecommunications, Rome, Italy, 2–5 October 2012. [Google Scholar]
- Boucher, C. Fusion of GPS, OSM and DEM Data for Estimating Road Network Elevation. In Proceedings of the IEEE International Conference on Computational Intelligence, Communication Systems and Networks, Madrid, Spain, 5–7 June 2013; pp. 273–278. [Google Scholar]
- Tachikawa, T. ASTER Global Digital Elevation Model Version 2—Summary of Validation Results; Technical Report; NASA: Washington, DC, USA, 2011. [Google Scholar]
- Farr, T.G.; Rosen, P.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, 1–33. [Google Scholar] [CrossRef]
- Colosimo, G.; Vendictis, L.D.; Crespi, M.; Jacobsen, K. Accuracy evaluation of SRTM and ASTER DSMs. In Proceedings of the 29th EARSeL Symposium (European Association of Remote Sensing Laboratories), Chania, Greece, 15–18 June 2009. [Google Scholar]
- Suwandana, E.; Kawamura, K.; Sakuno, Y.; Kustiyanto, E.; Raharjo, B. Evaluation of ASTER GDEM2 in Comparison with GDEM1, SRTM DEM and Topographic-Map-Derived DEM Using Inundation Area Analysis and RTK-dGPS Data. Remote Sens. 2012, 4, 2419–2431. [Google Scholar] [CrossRef]
- Grip, H.F.; Imsland, L.; Johansen, T.A.; Kalkkuhl, J.C.; Suissa, A. Estimation of road inclination and bank angle in automotive vehicles. In Proceedings of the American Control Conference (ACC), St. Louis, MO, USA, 10–12 June 2009; pp. 426–432. [Google Scholar]
- Poz, A.P.D.; Gallis, R.A.B.; da Silva, J.F.C. Three-Dimensional Semiautomatic Road Extraction from a High-Resolution Aerial Image by Dynamic-Programming Optimization in the Object Space. IEEE Geosci. Remote Sens. Lett. 2010, 7, 796–800. [Google Scholar]
- Wang, J.; Lawson, G.; Shen, Y. Automatic high-fidelity 3D road network modeling based on 2D {GIS} data. Adv. Eng. Softw. 2014, 76, 86–98. [Google Scholar] [CrossRef]
- Gong, Y.; Zhu, Y.; Yu, J. DEEL: Detecting elevation of urban roads with smartphones on wheels. In Proceedings of the 2015 12th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Seattle, WA, USA, 22–25 June 2015; pp. 363–371. [Google Scholar]
- Selim, G.; Sabour, A.A. Extending land navigation applications to support off road based on elevation and land characteristics. In Proceedings of the 2010 IEEE International Conference on Vehicular Electronics and Safety (ICVES), QingDao, China, 15–17 July 2010; pp. 65–72. [Google Scholar]
- Mandel, C.; Laue, T. Particle filter-based position estimation in road networks using digital elevation models. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 5744–5749. [Google Scholar]
- Chewputtanagul, P.; Jackson, D.J. A road recognition system using GPS/GIS integrated system. In Proceedings of the 2004 IEEE Region 10 Conference, TENCON 2004, Chiang Mai, Thailand, 24 November 2004; Volume D4, pp. 225–228. [Google Scholar]
- Van der Merwe, R.; Doucet, A.; de Freitas, N.; Wan, E. The Unscented Particle Filter; Technical Report CUED/F-INFENG/TR 380; Cambridge University: Cambridge, UK, 2000. [Google Scholar]
- Yao, Z.; Cui, X.; Lu, M.; Feng, Z. Dual update-rate carrier tracking technique for new generation global navigation satellite system signals in dynamic environments. IET Radar Sonar Navig. 2009, 3, 203–213. [Google Scholar] [CrossRef]
- Cabani, A.; Khemmar, R.; Ertaud, J.Y.; Mouzna, J. Intelligent navigation system-based optimization of the energy consumption. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 785–789. [Google Scholar]
- Julier, S.; Uhlmann, J. A New Extension of the Kalman Filter to Nonlinear Systems. In Proceedings of the SPIE Aerosense Symposium, Orlando, FL, USA, 20–25 April 1997. [Google Scholar]
- Arulampalam, M.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. A General Method for Approximating Nonlinear Transformation of Probability Distribution; Technical Report; University of Oxford: Oxford, UK, 1996. [Google Scholar]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Transp. Res. Part C 2007, 15, 312–328. [Google Scholar] [CrossRef] [Green Version]
- Mahalanobis, P.C. On the Generalised Distance in Statistics. In Proceedings of the National Institute of Sciences of India; Springer: Berlin, Germany, 1936; Volume 2, pp. 49–55. [Google Scholar]
- Boucher, C.; Noyer, J.C. Automatic estimation of road inclinations by fusing GPS readings with OSM and ASTER GDEM2 data. In Proceedings of the IEEE International Conference on Connected Vehicles & Expo, Vienna, Austria, 3–7 November 2014; pp. 871–876. [Google Scholar]
- Tighe, M.L.; Chamberlain, D. Accuracy Comparison of the SRTM, ASTER, NED, NEXTMAP USA Digital Terrain Model over Several USA Study Sites; Technical Report; Intermap Technologies: Englewood, CO, USA, 2009. [Google Scholar]
- Kaplan, E. (Ed.) Understanding GPS: Principles and Applications; Artech House: Boston, MA, USA, 1996. [Google Scholar]
- BAE Systems. User’s Guide for MSP Geographic Translator (GEOTRANS) Version 3.5; BAE Systems: San Diego, CA, USA, 2014. [Google Scholar]



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boucher, C.; Noyer, J.-C. A General Framework for 3-D Parameters Estimation of Roads Using GPS, OSM and DEM Data. Sensors 2018, 18, 41. https://doi.org/10.3390/s18010041
Boucher C, Noyer J-C. A General Framework for 3-D Parameters Estimation of Roads Using GPS, OSM and DEM Data. Sensors. 2018; 18(1):41. https://doi.org/10.3390/s18010041
Chicago/Turabian StyleBoucher, Christophe, and Jean-Charles Noyer. 2018. "A General Framework for 3-D Parameters Estimation of Roads Using GPS, OSM and DEM Data" Sensors 18, no. 1: 41. https://doi.org/10.3390/s18010041