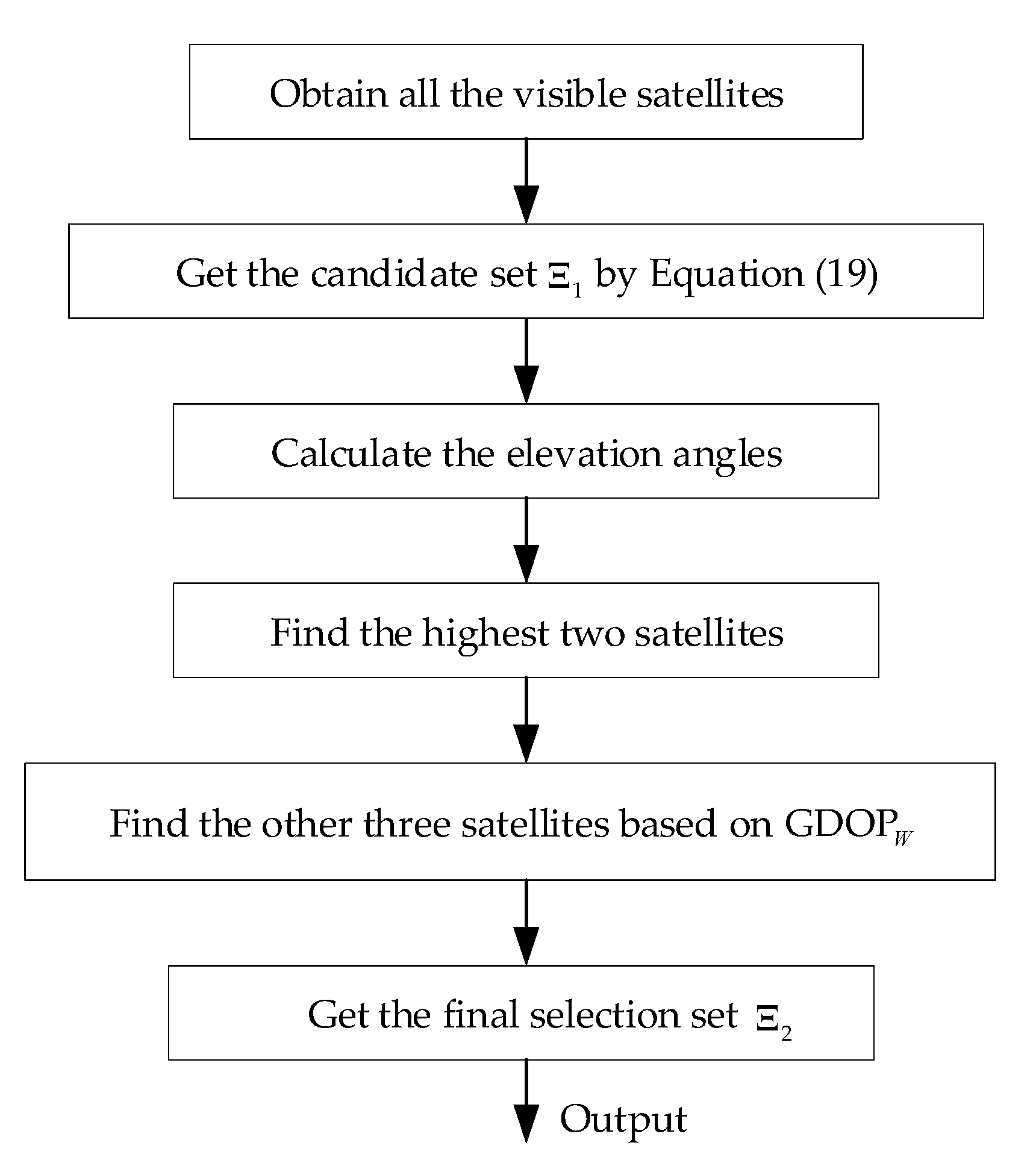
Figure 1.
The flow chart of the proposed satellite selection.
Figure 1.
The flow chart of the proposed satellite selection.
Figure 2.
The flow chart of the proposed adaptive RMNCE-UKF.
Figure 2.
The flow chart of the proposed adaptive RMNCE-UKF.
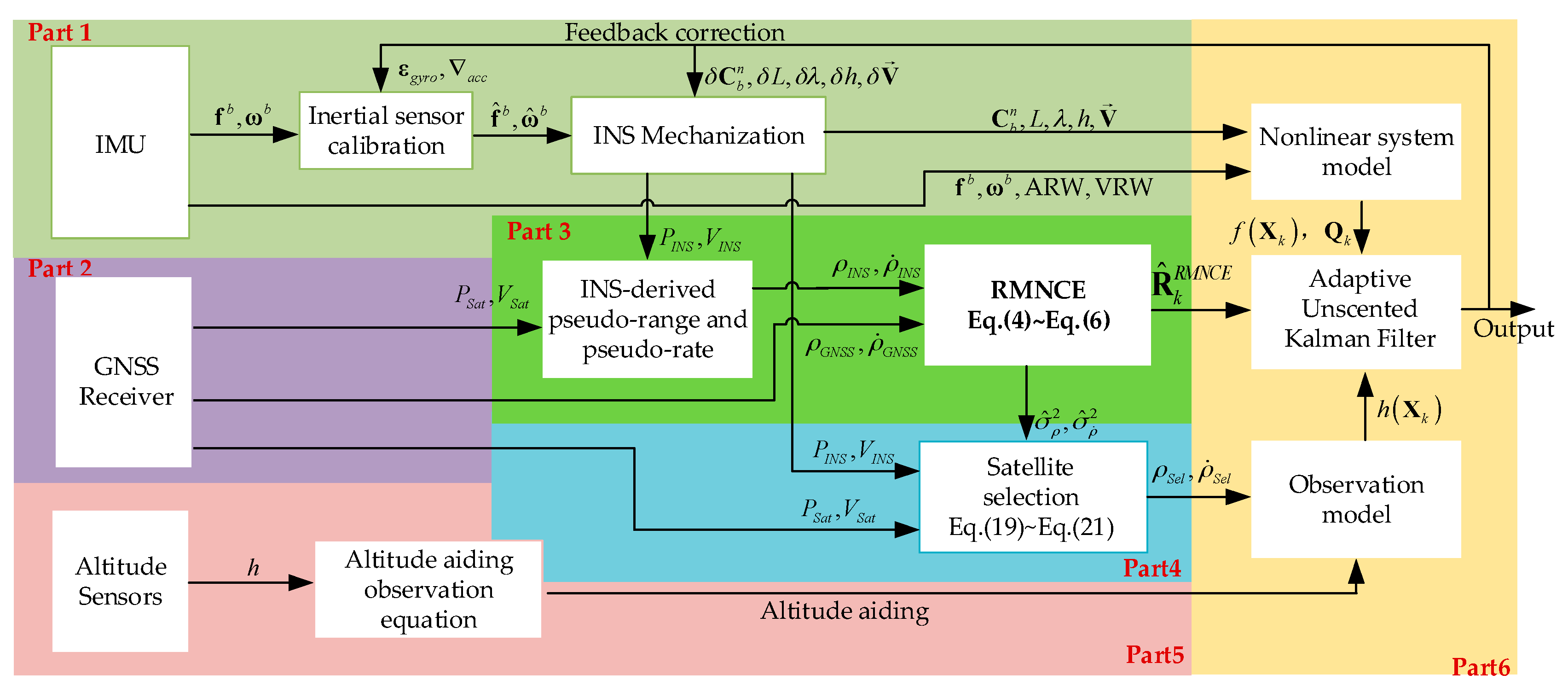
Figure 3.
The proposed tightly-coupled architecture based on the RMNCE approach.
Figure 3.
The proposed tightly-coupled architecture based on the RMNCE approach.
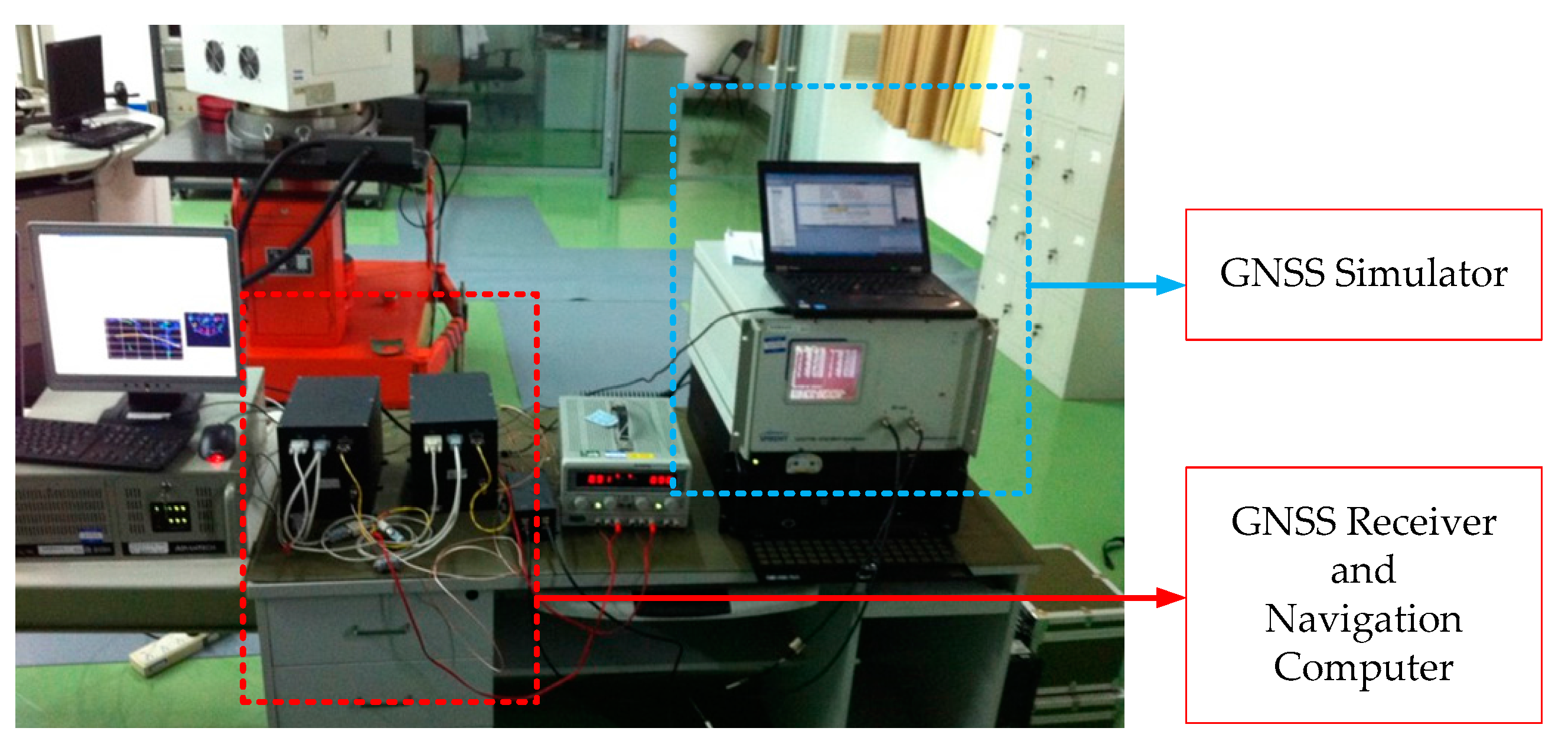
Figure 4.
Devices employed in the semi-physical simulation experiments.
Figure 4.
Devices employed in the semi-physical simulation experiments.
Figure 5.
The estimated variances of the pseudo-range measurement noise obtained by RAE and RMNCE.
Figure 5.
The estimated variances of the pseudo-range measurement noise obtained by RAE and RMNCE.
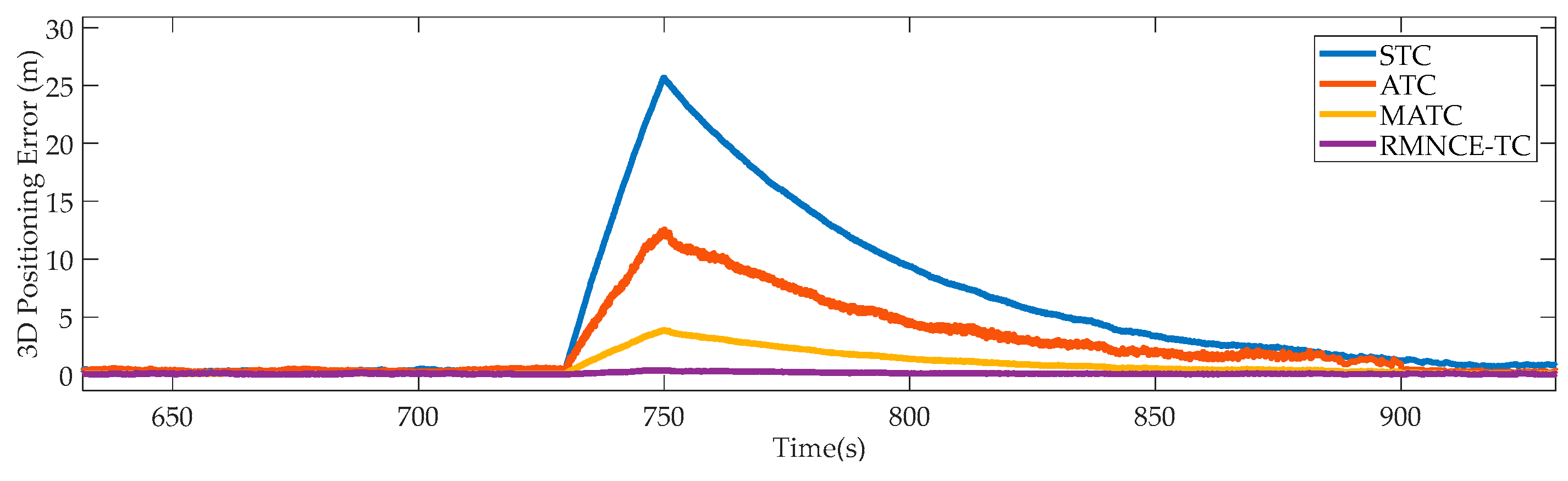
Figure 6.
3D positioning errors of the selected schemes during [730 s, 750 s].
Figure 6.
3D positioning errors of the selected schemes during [730 s, 750 s].
Figure 7.
3D positioning errors of the selected schemes during [1900 s, 2500 s].
Figure 7.
3D positioning errors of the selected schemes during [1900 s, 2500 s].
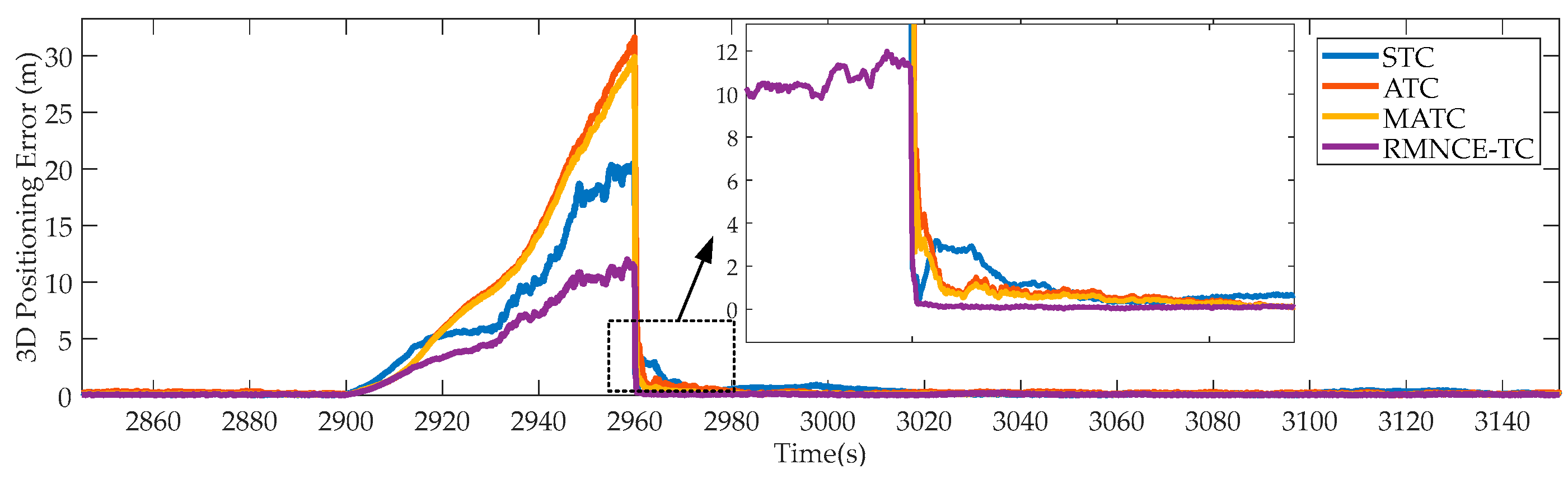
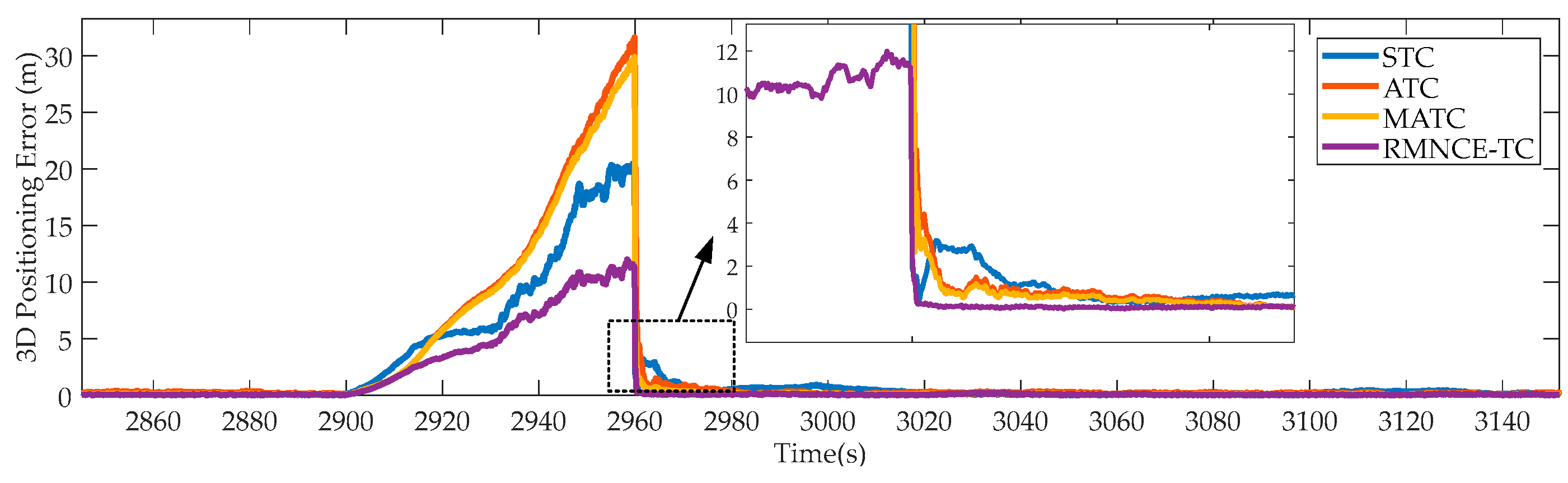
Figure 8.
3D positioning errors of the selected schemes during [2900 s, 2960 s].
Figure 8.
3D positioning errors of the selected schemes during [2900 s, 2960 s].
Figure 9.
Comparison of the residual sequence and SOMD sequence of satellite #24 when the number of visible satellites changes from 1 to 8 at the 2960-th second.
Figure 9.
Comparison of the residual sequence and SOMD sequence of satellite #24 when the number of visible satellites changes from 1 to 8 at the 2960-th second.
Figure 10.
The test vehicle platform and equipment. (a) Designed hardware platform; (b) GNSS antennas and the NovAtel device.
Figure 10.
The test vehicle platform and equipment. (a) Designed hardware platform; (b) GNSS antennas and the NovAtel device.
Figure 11.
Reference trajectory of the field experiment (the blue arrows indicate the final part).
Figure 11.
Reference trajectory of the field experiment (the blue arrows indicate the final part).
Figure 12.
Navigation differences with respect to the reference trajectory using STC4, STC5, ATC, MATC RMNCE-TC and CNE-TC: (a) longitude differences (m); (b) latitude differences (m); (c) east velocity differences (m/s); (d) north velocity differences (m/s).
Figure 12.
Navigation differences with respect to the reference trajectory using STC4, STC5, ATC, MATC RMNCE-TC and CNE-TC: (a) longitude differences (m); (b) latitude differences (m); (c) east velocity differences (m/s); (d) north velocity differences (m/s).
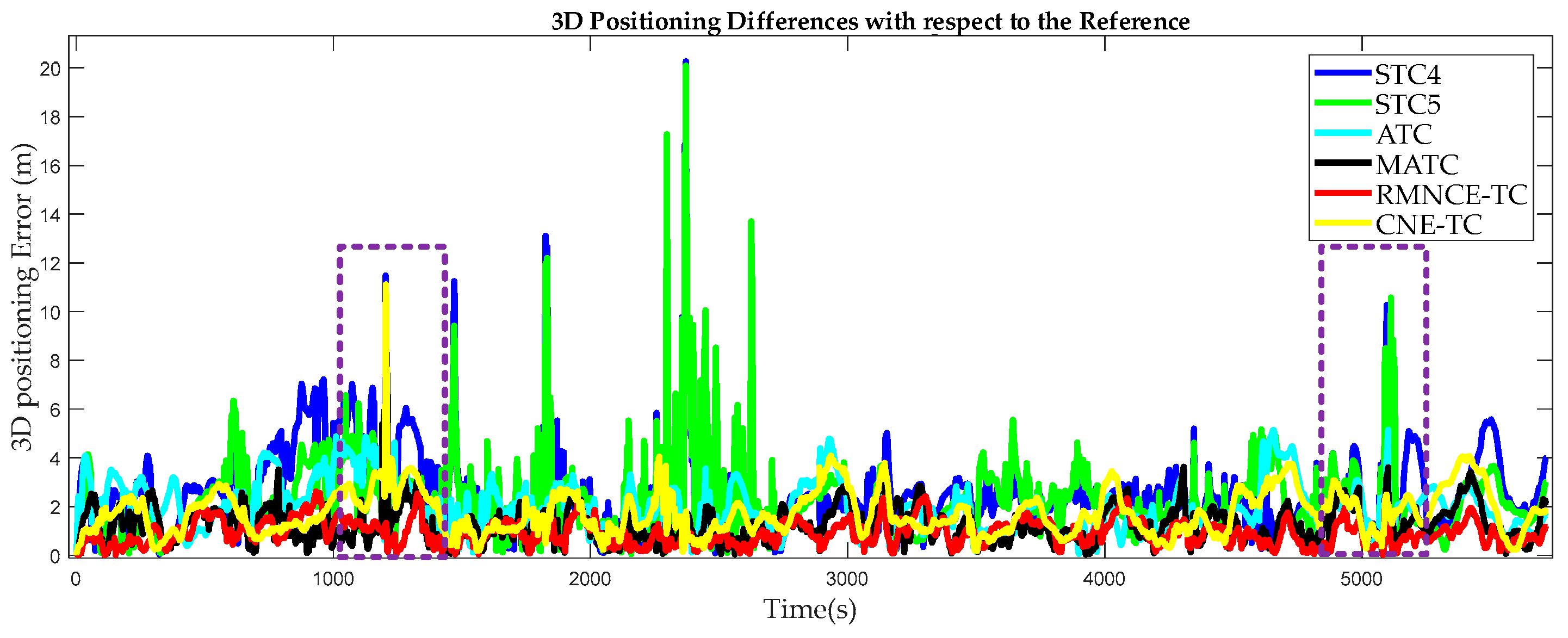
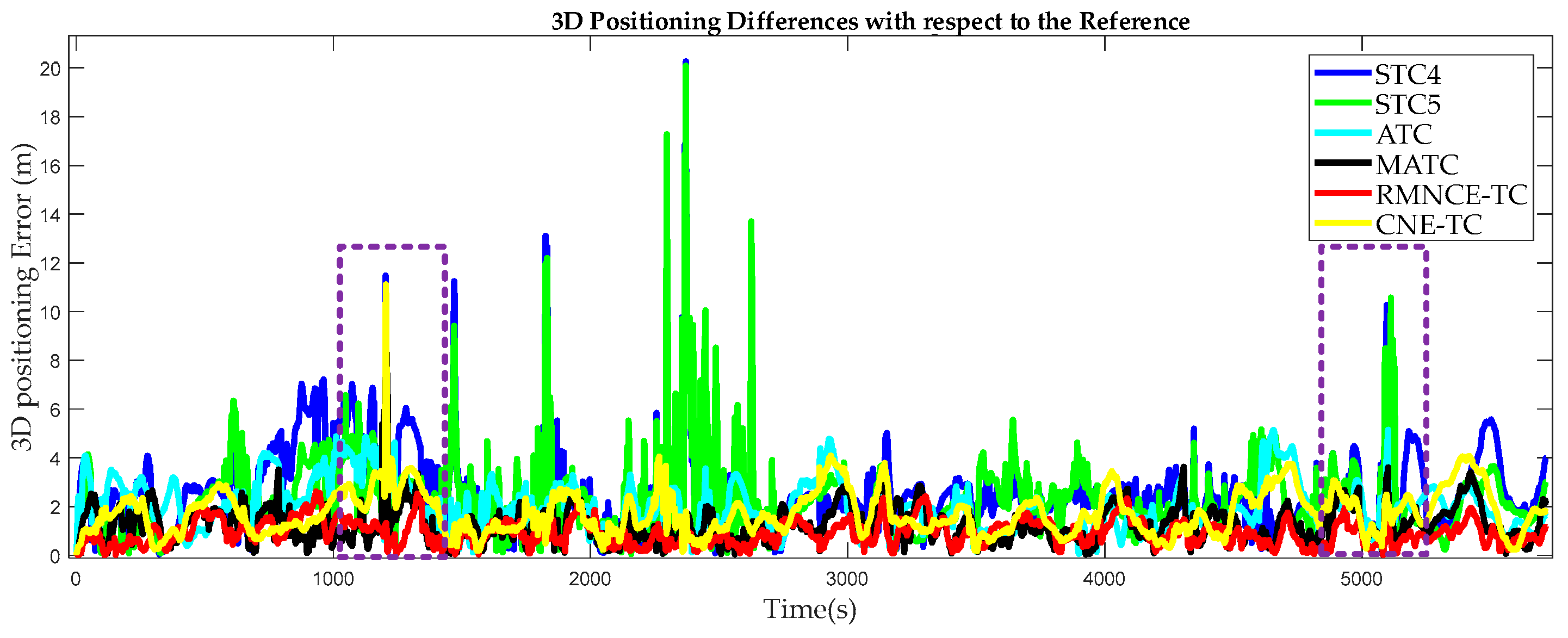
Figure 13.
3D positioning differences of the test schemes with respect to the reference trajectory.
Figure 13.
3D positioning differences of the test schemes with respect to the reference trajectory.
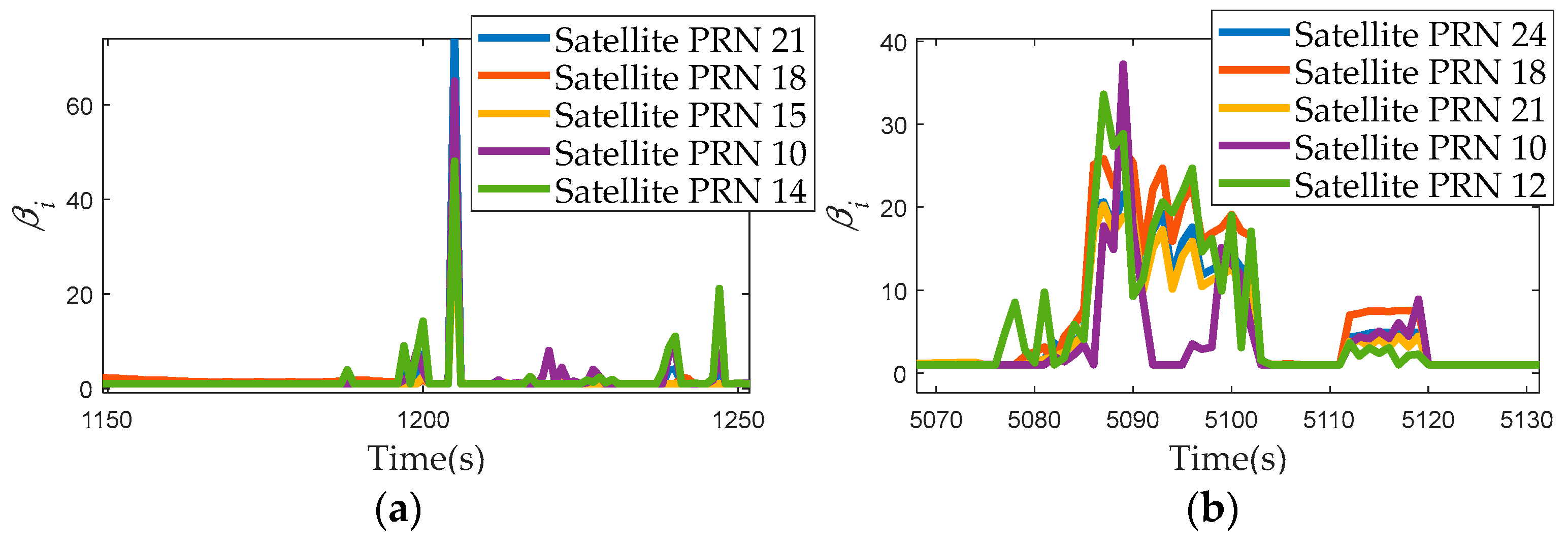
Figure 14.
The value of the expanding scale with respect to the five pseudo-range measurements: (a) 1150 s to 1250 s; (b) 5070 s to 5120 s.
Figure 14.
The value of the expanding scale with respect to the five pseudo-range measurements: (a) 1150 s to 1250 s; (b) 5070 s to 5120 s.
Figure 15.
Histogram of the positioning errors obtained for the test schemes.
Figure 15.
Histogram of the positioning errors obtained for the test schemes.
Figure 16.
Four segments in the vehicle trajectory selected for detailed analyses.
Figure 16.
Four segments in the vehicle trajectory selected for detailed analyses.
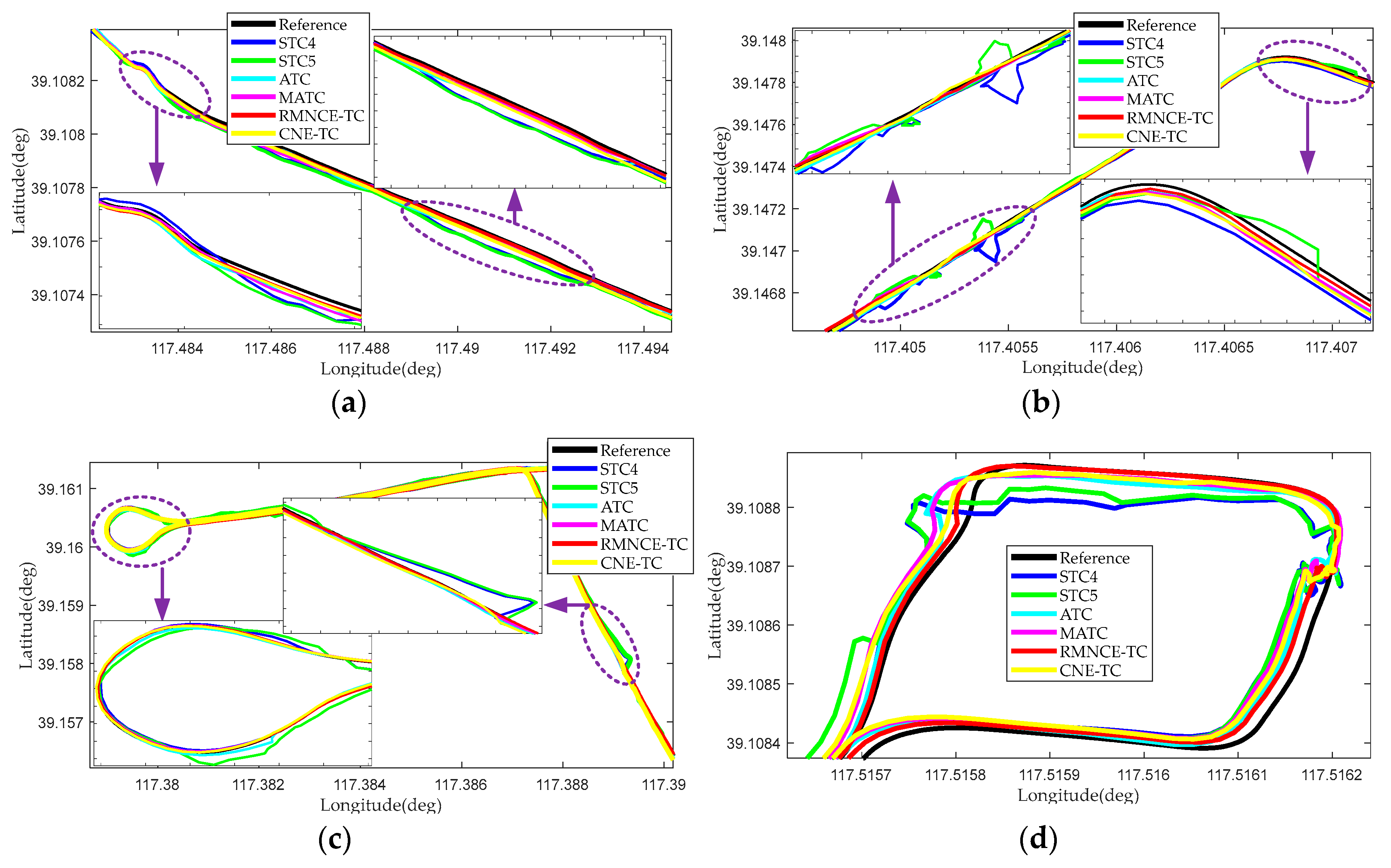
Figure 17.
Local reference trajectories and those provided by different test schemes: (a) trajectories in segment S1; (b) trajectories in segment S2; (c) trajectories in segment S3; (d) trajectories in segment S4.
Figure 17.
Local reference trajectories and those provided by different test schemes: (a) trajectories in segment S1; (b) trajectories in segment S2; (c) trajectories in segment S3; (d) trajectories in segment S4.
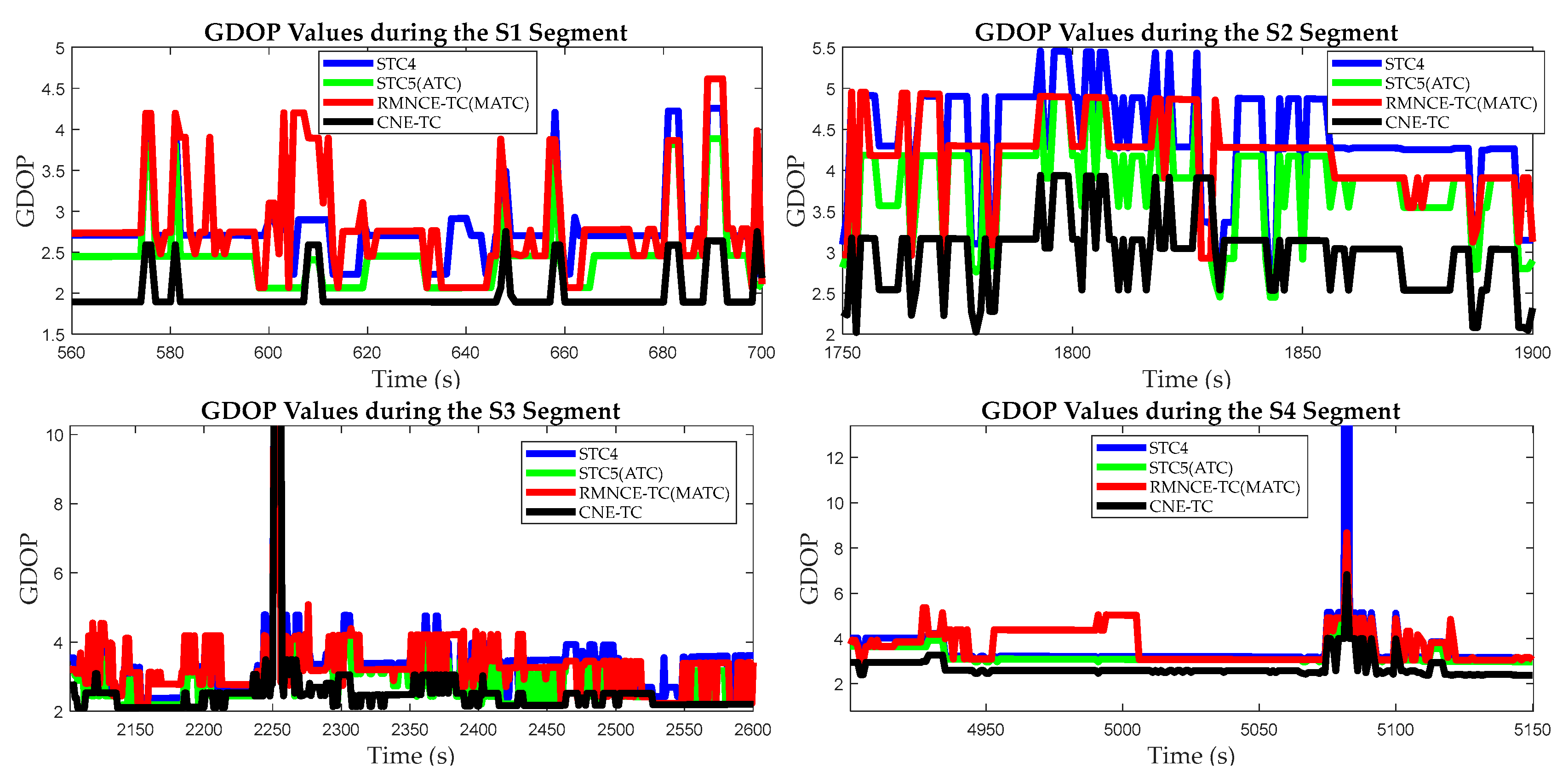
Figure 18.
GDOP values of the different satellite selection algorithms during segments S1, S2, S3, and S4.
Figure 18.
GDOP values of the different satellite selection algorithms during segments S1, S2, S3, and S4.
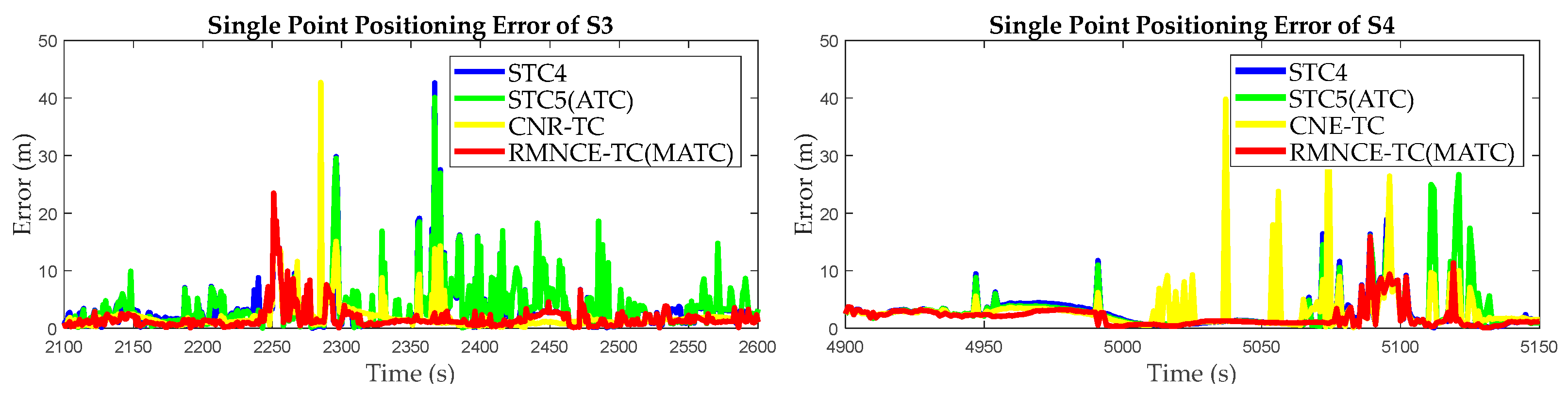
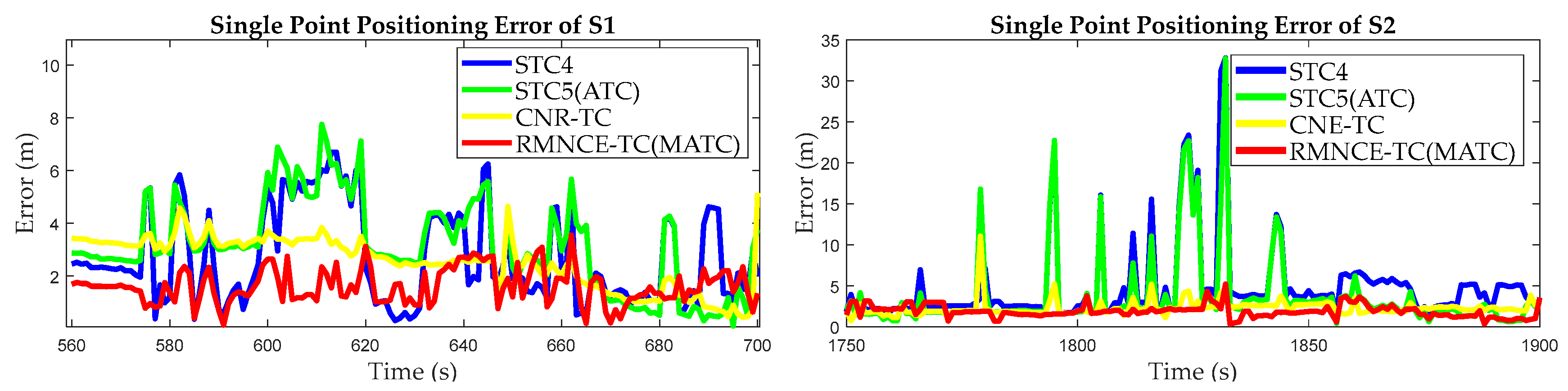
Figure 19.
Single point positioning errors of the different satellite selection algorithms during segments S1, S2, S3, and S4.
Figure 19.
Single point positioning errors of the different satellite selection algorithms during segments S1, S2, S3, and S4.
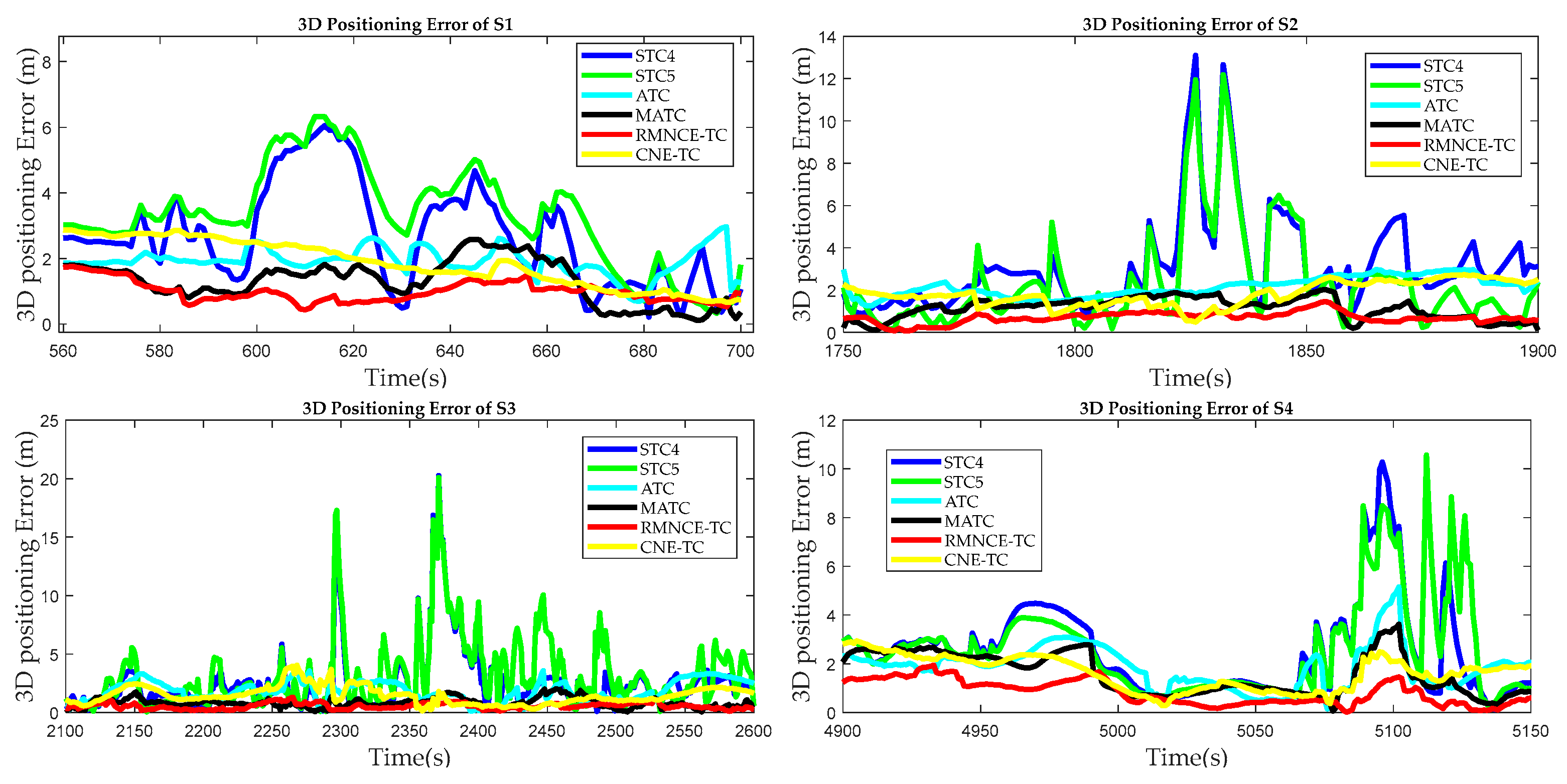
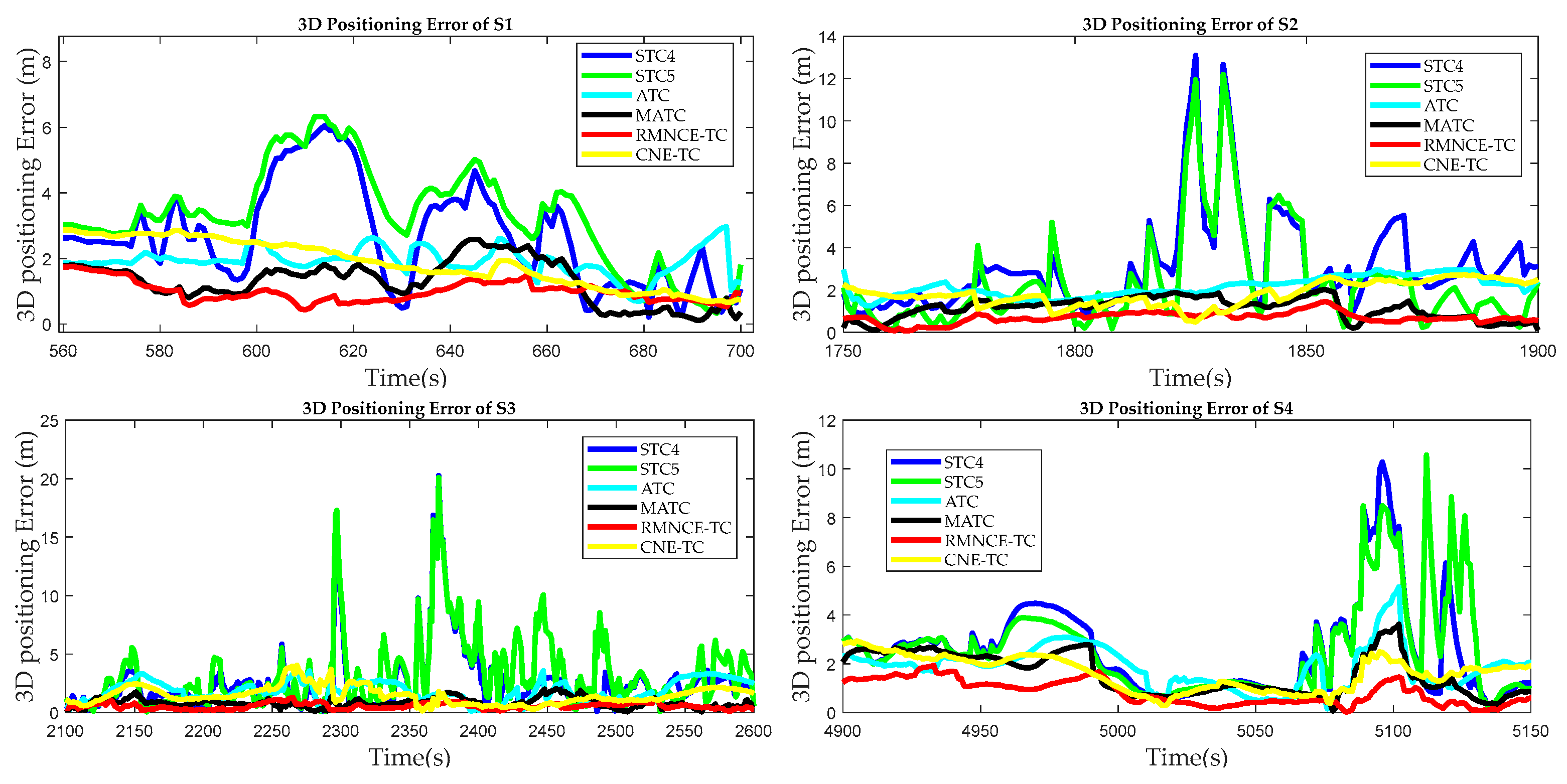
Figure 20.
3D positioning errors of the different test schemes during segments S1, S2, S3, and S4.
Figure 20.
3D positioning errors of the different test schemes during segments S1, S2, S3, and S4.
Table 1.
Sensor error settings employed in the simulation experiments.
Table 1.
Sensor error settings employed in the simulation experiments.
| Parameters | Performance |
|---|
| Gyroscope bias | |
| Angle random walk | |
| Accelerometer bias | 1 mg |
| Velocity random walk | |
| Variance of barometer | 25 m2 |
Table 2.
The GNSS measurement error settings.
Table 2.
The GNSS measurement error settings.
| Time(s) | Satellite Number | | | Special Settings |
|---|
| 730–750 | 7 | 1 | 0.01 | add additional large errors 1 to the #10, #13 and #24 satellite pesudo-range easurements |
| 1900–2500 | 7 | 2 | 0.01 | increase of #10, #13 and # 24 to 5m |
| 2900–2960 | 1 | 1 | 0.01 | only #24 is visible |
| other | 8 | 1 | 0.01 | — |
Table 3.
RMSE obtained by the different schemes.
Table 3.
RMSE obtained by the different schemes.
| | STC | ATC | MATC | RMNCE-TC |
|---|
| Latitude (m) | 3.0236 | 0.6926 | 0.5960 | 0.3706 |
| Longitude (m) | 3.8596 | 1.5556 | 1.4370 | 1.1603 |
| East velocity (m/s) | 0.1528 | 0.0797 | 0.0767 | 0.0698 |
| North velocity (m/s) | 0.1795 | 0.0863 | 0.0864 | 0.0866 |
| Heading (°) | 0.7027 | 0.4813 | 0.4766 | 0.4656 |
| Pitch (°) | 0.4743 | 0.2013 | 0.1714 | 0.1015 |
| Roll (°) | 0.1070 | 0.1214 | 0.1176 | 0.1088 |
Table 4.
Satellite selection results of the different schemes at the 740-th second.
Table 4.
Satellite selection results of the different schemes at the 740-th second.
| | Selected Satellites ID | GDOP | 3D Positioning Error |
|---|
| STC | 10, 13, 29, 21 | 2.766 | 13.580 m |
| ATC | 15, 10, 18, 13, 29 | 2.408 | 3.115 m |
| MATC | 15, 10, 18, 21, 29 | 2.452 | 2.215 m |
| RMNCE-TC | 15, 10, 18, 21, 29 | 2.452 | 0.152 m |
Table 5.
Satellite selection results of the different schemes at the 2050-th second.
Table 5.
Satellite selection results of the different schemes at the 2050-th second.
| | Selected Satellites ID | GDOP | 3D Positioning Error |
|---|
| STC | 10, 13, 21, 29 | 2.430 | 1.072 m |
| ATC | 10, 13, 18, 24, 29 | 2.159 | 0.728 m |
| MATC | 15, 10, 18, 21, 29 | 2.168 | 0.461 m |
| RMNCE-TC | 15, 10, 18, 21, 29 | 2.168 | 0.205 m |
Table 6.
The performance parameters of the IMU sensor.
Table 6.
The performance parameters of the IMU sensor.
| Gyroscope Performance | Accelerometer Performance |
|---|
| Bias stability: | Bias stability: 1 mg |
| ARW: | VRW: |
| Input range: | Input range: ±10 g |
| Scale factor non-linearity: ≤100 ppm | Scale factor non-linearity: ≤100 ppm |
Table 7.
Different schemes during the test.
Table 7.
Different schemes during the test.
| Label | Satellite Selection | Filer Technique |
|---|
| STC4 | 4 satellites, DGOP based | Standard UKF |
| STC5 | 5 satellites, DGOP based | Standard UKF |
| ATC | 5 satellites, DGOP based | RAE-UKF |
| MATC | 5 satellites, RMNCE based | RAE-UKF |
| RMNCE-TC | 5 satellites, RMNCE based | RMNCE-UKF |
| CNE-TC | Variable selected satellite number based on CNR and elevation | R is weighted by CNR and satellite elevation |
Table 8.
Global RMSE values of the different schemes.
Table 8.
Global RMSE values of the different schemes.
| | STC4 | STC5 | ATC | MATC | RMNCE-TC | CNE-TC |
|---|
| Latitude (m) | 1.8205 | 1.7114 | 1.3430 | 1.1557 | 0.5697 | 1.5629 |
| Longitude (m) | 2.2633 | 2.1034 | 1.7706 | 1.4231 | 0.8689 | 1.1514 |
| East velocity (m/s) | 0.1124 | 0.1078 | 0.0595 | 0.0301 | 0.0299 | 0.0300 |
| North velocity (m/s) | 0.1122 | 0.1337 | 0.0406 | 0.0382 | 0.0370 | 0.0475 |
| Heading (°) | 0.9092 | 0.8389 | 0.6072 | 0.6101 | 0.6061 | 0.6001 |
| Pitch (°) | 0.2838 | 0.2537 | 0.1925 | 0.1905 | 0.1835 | 0.1921 |
| Roll (°) | 0.1957 | 0.1832 | 0.1852 | 0.1860 | 0.1852 | 0.1858 |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}