Angular Rate Sensing with GyroWheel Using Genetic Algorithm Optimized Neural Networks

Abstract
:1. Introduction
2. Overview of GyroWheel System
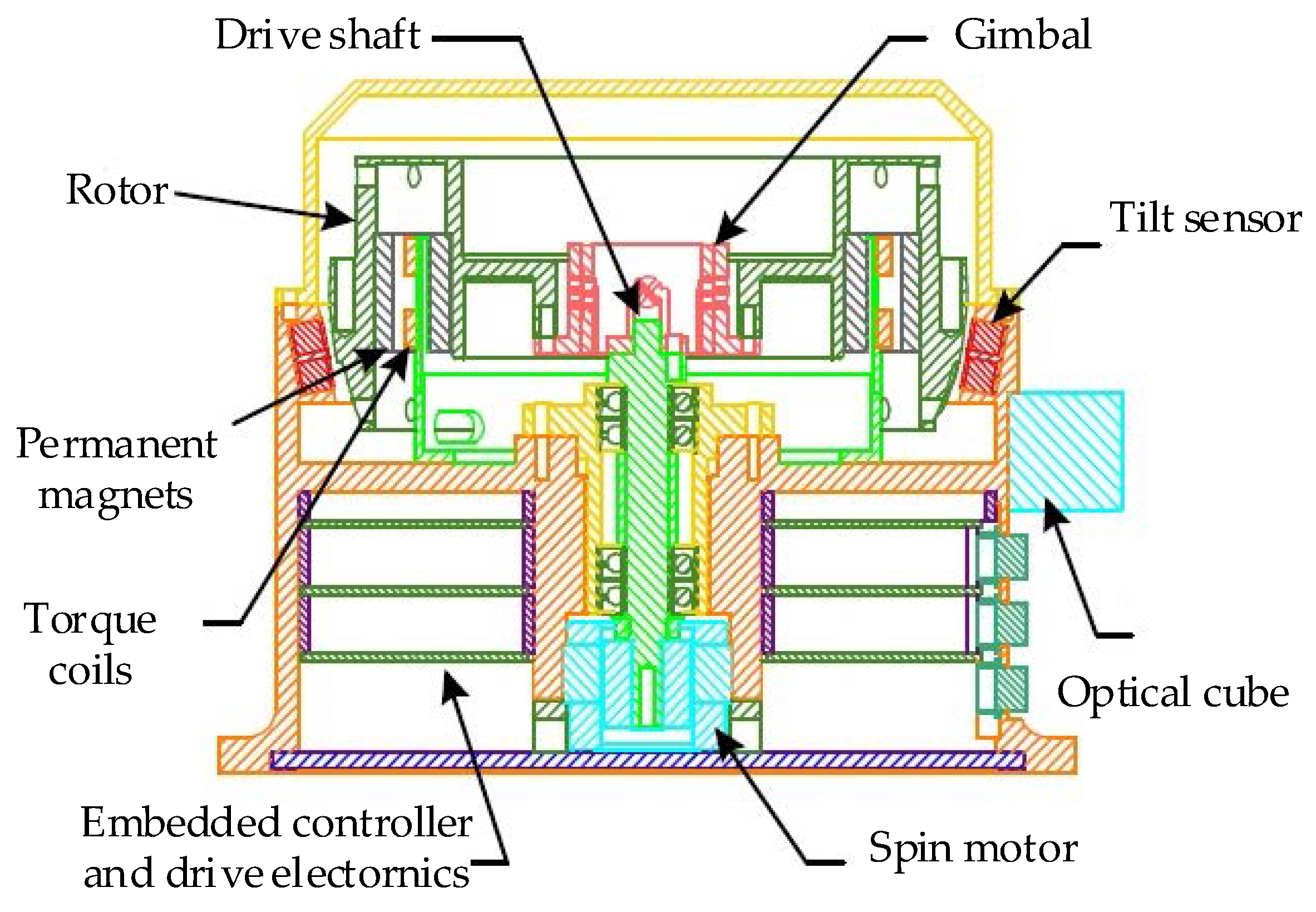
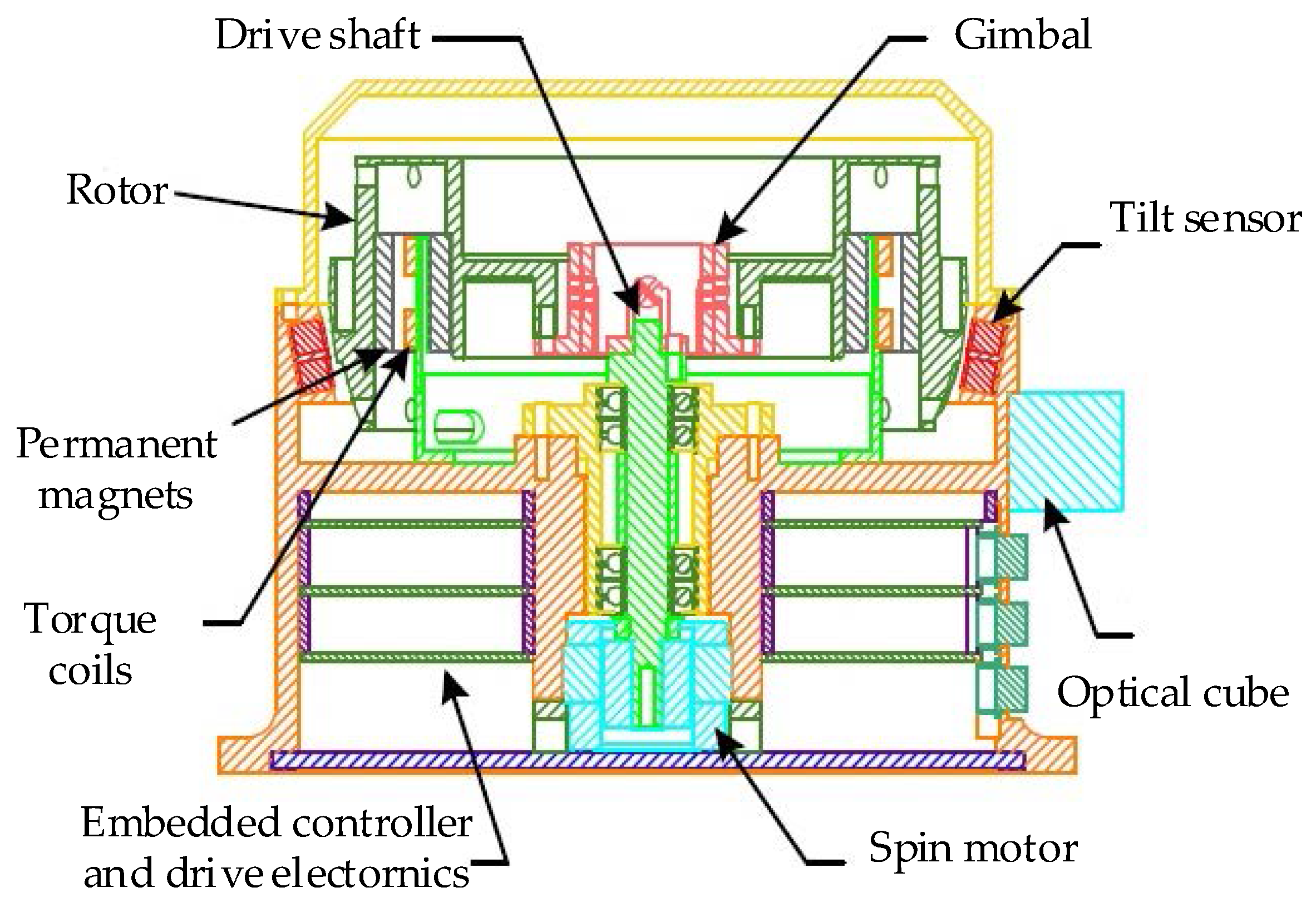
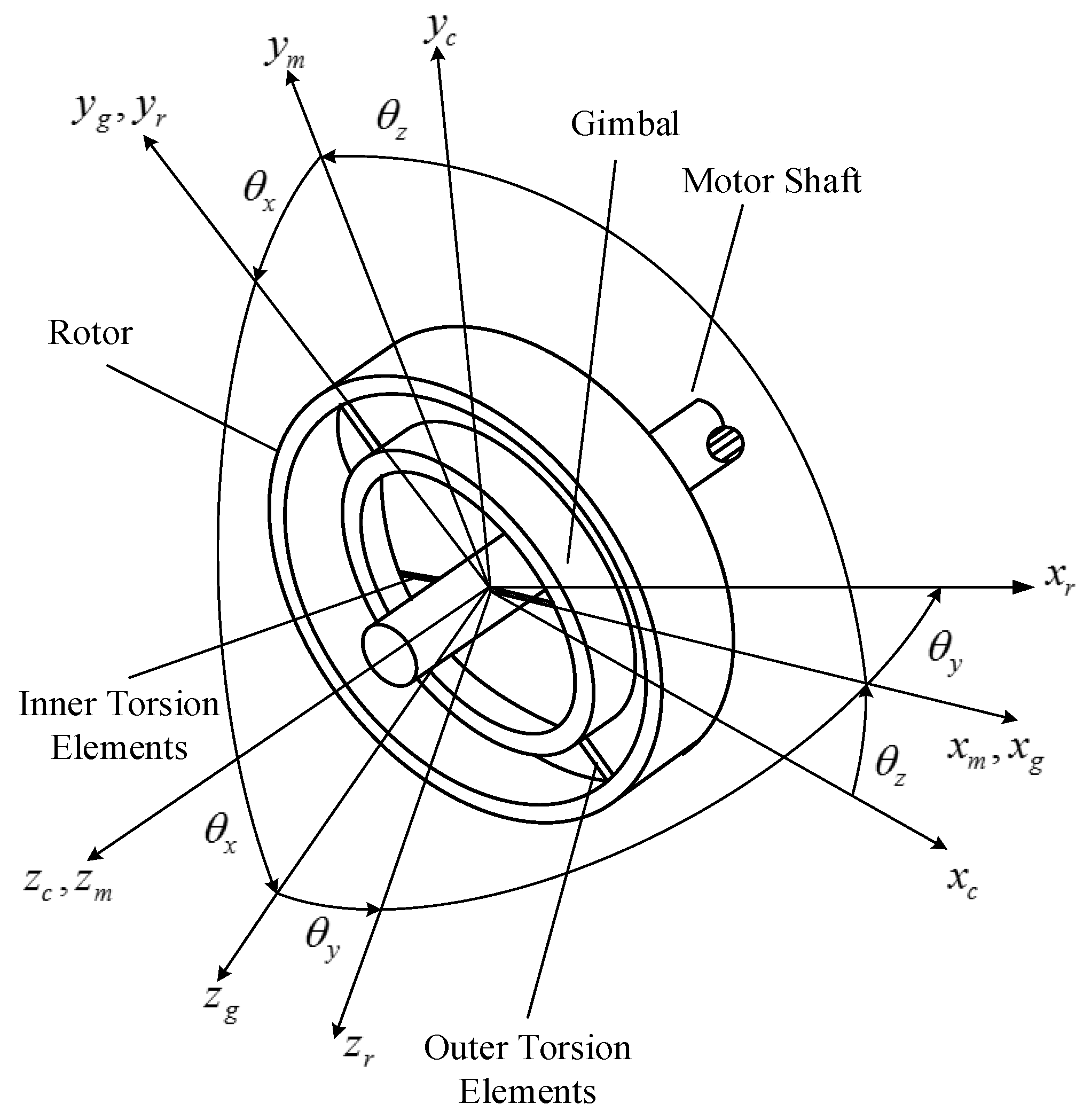
2.1. GyroWheel Mechanical Configuration
2.2. Dynamic Models of GyroWheel System
3. GyroWheel Rate Sensing for Small Tilt Conditions and Error Analysis
3.1. Rate Sensing Equation for Small Tilt Conditions
3.2. Error Analysis of GyroWheel Rate Sensing
3.2.1. Linearization Error
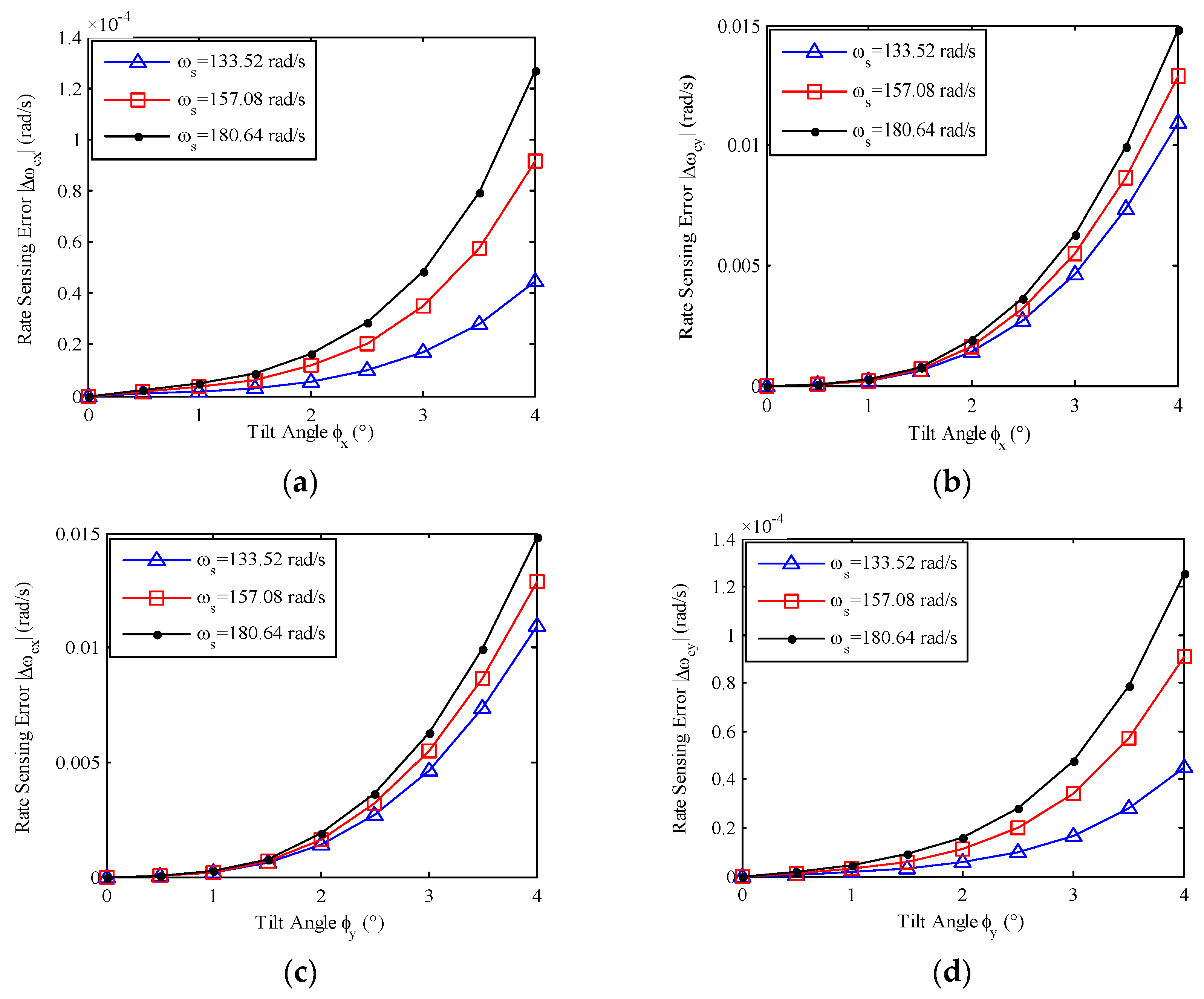
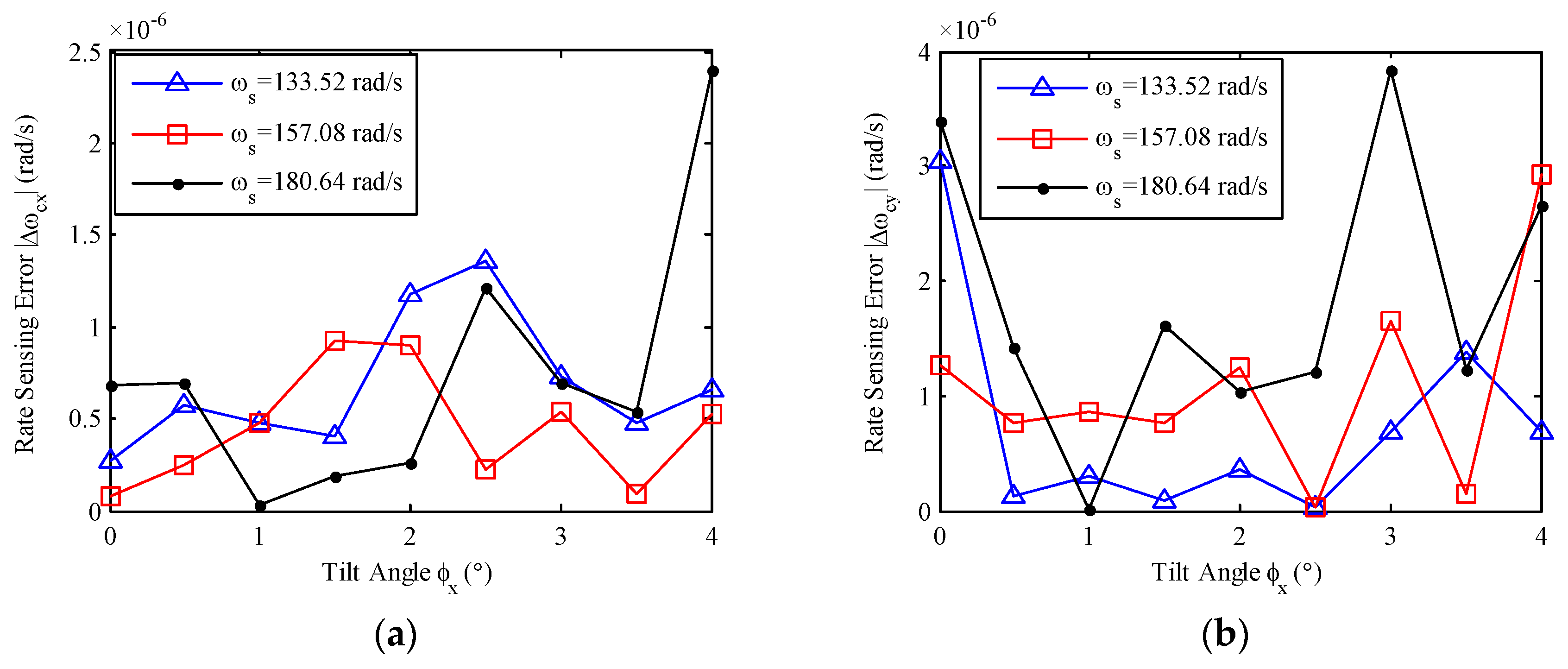
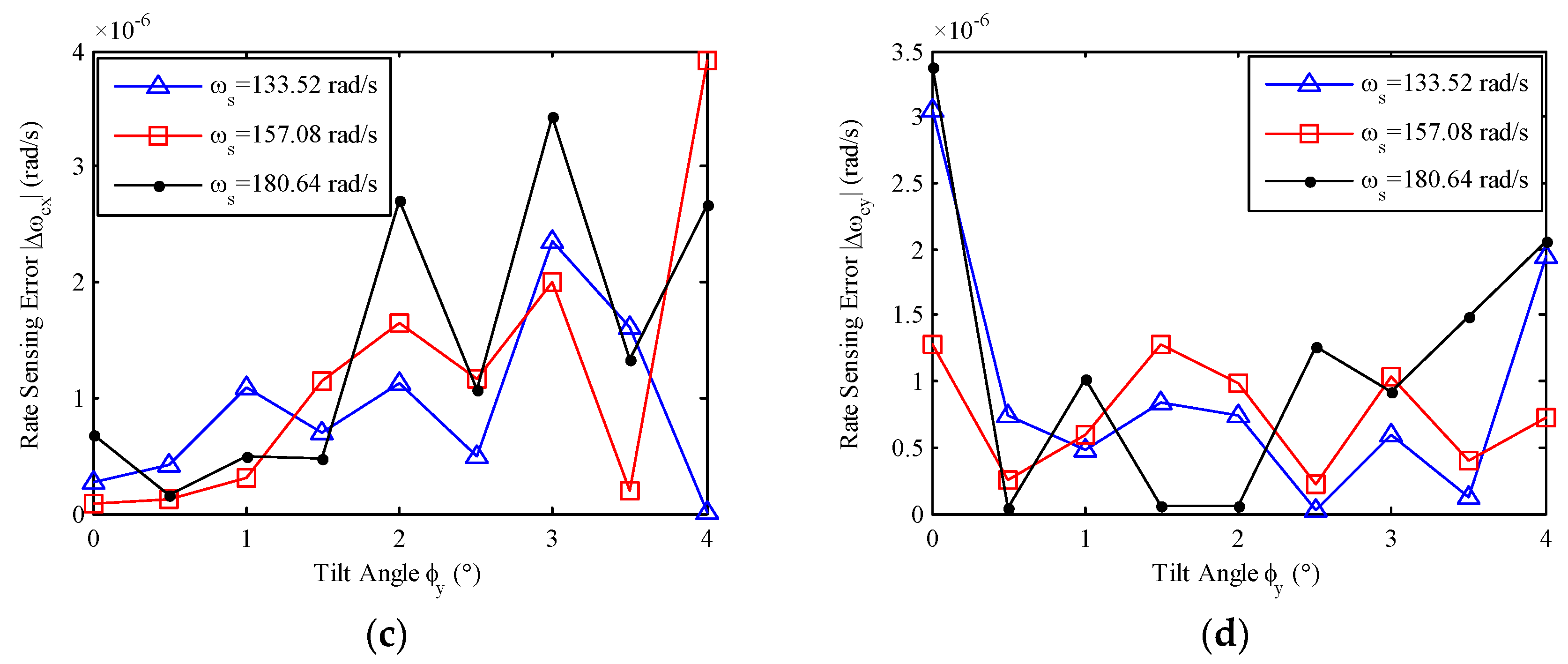
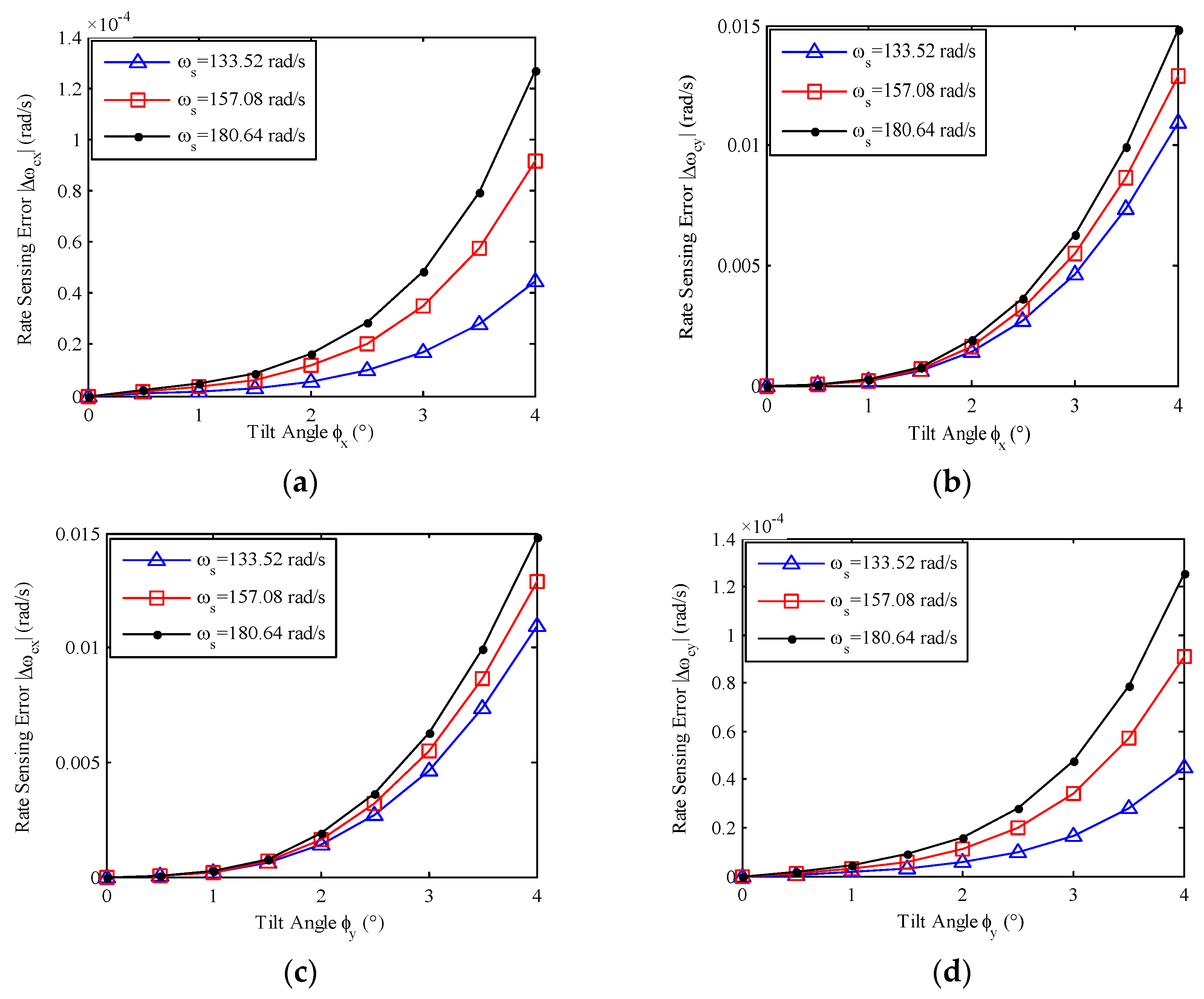
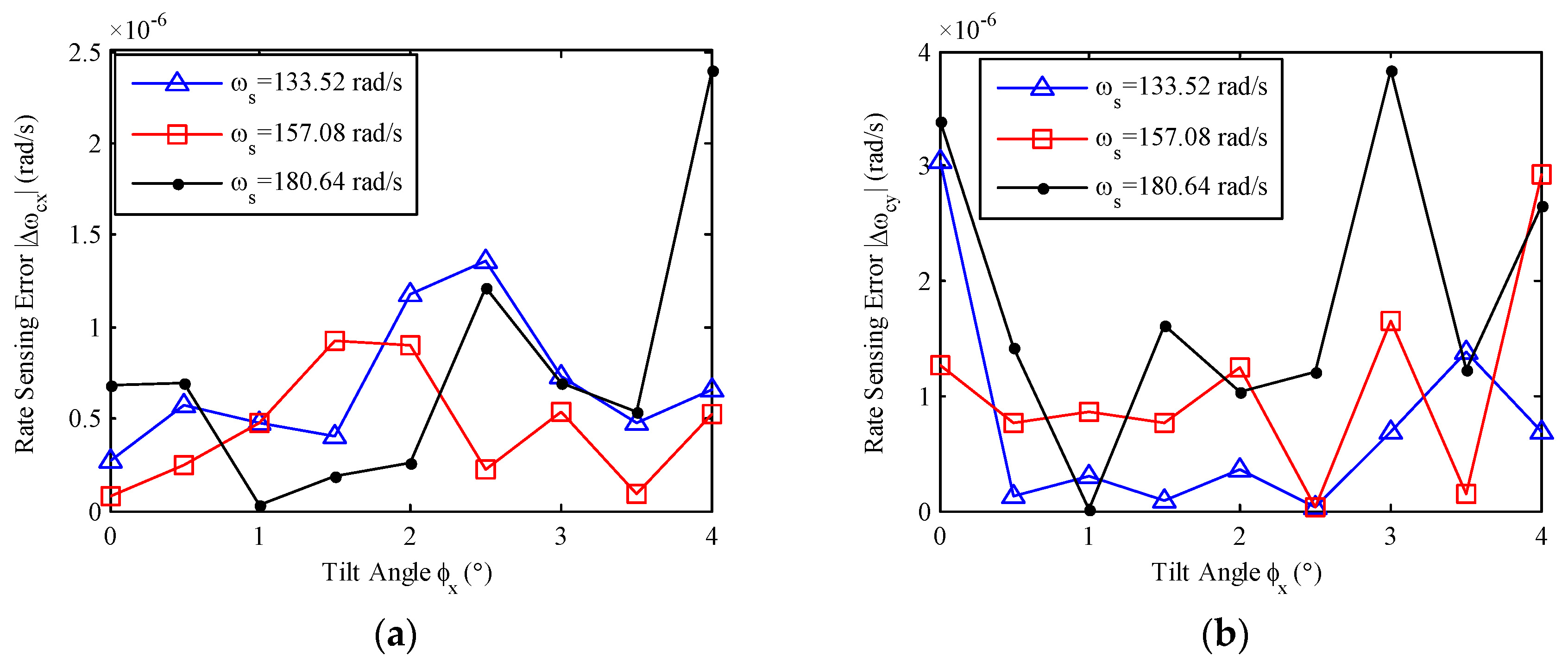
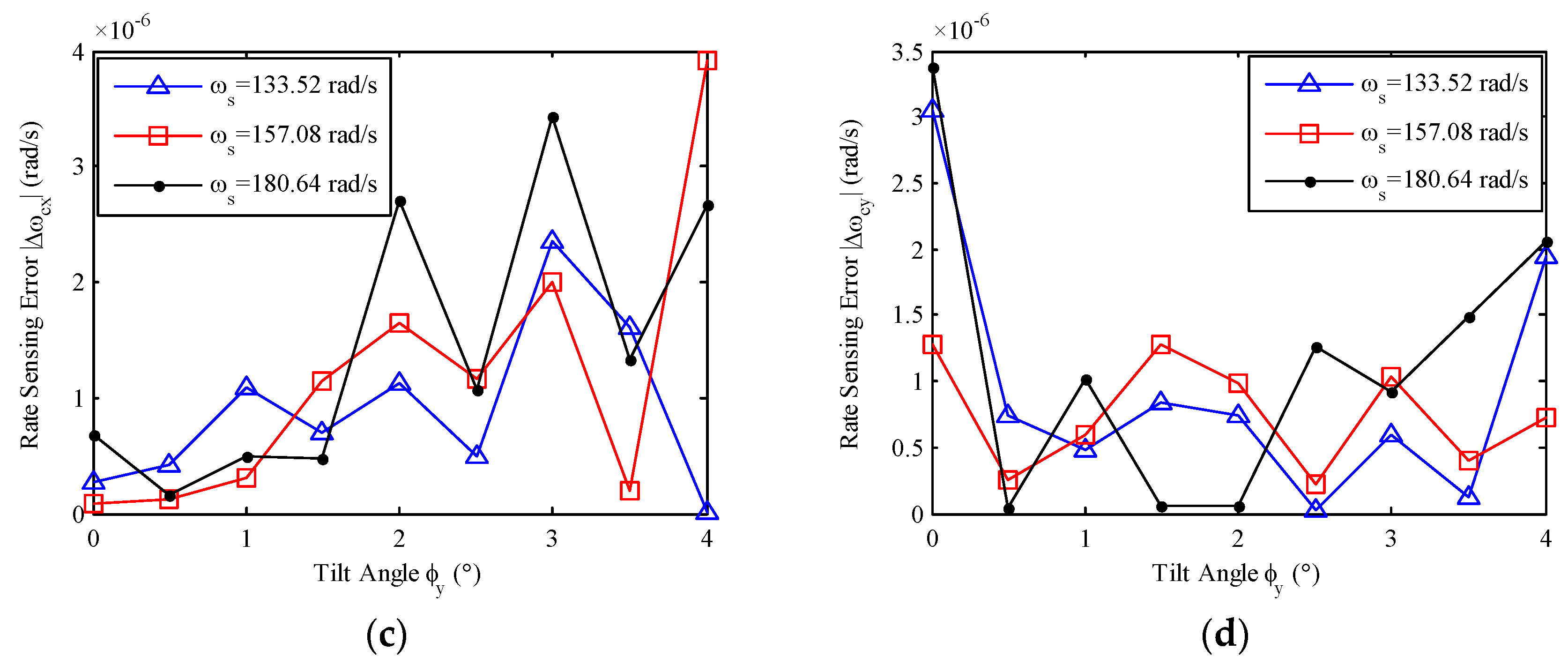
- The rate sensing errors caused by linearization at zero tilt are significantly correlated to the tilt angles of the GyroWheel rotor and the spin rate. The rate sensing errors increase with the increasing of the tilt angles and the increasing of the spin rate.
- The rate sensing Equation (14) can be applied to measure spacecraft angular rates under small tilt conditions where the rotor tilt angles are less than 0.5°. However, when the GyroWheel is operated at a tilt angle of 4°, the rate sensing errors are up to 10−2 rad/s. Obviously, the rate sensing accuracy is far from satisfactory under large tilt conditions.
- In an effort to ensure the rate sensing accuracy, the linearization errors should be compensated. The compensation terms are functions of tilt angles and spin rate, and can be denoted as .
3.2.2. Parameter Error
- Measurable values, including the tilt angles , the spin rate , and the coil currents .
- System parameters, including the moments of inertia , the stiffness coefficients , the damping coefficient , and the torque factors .
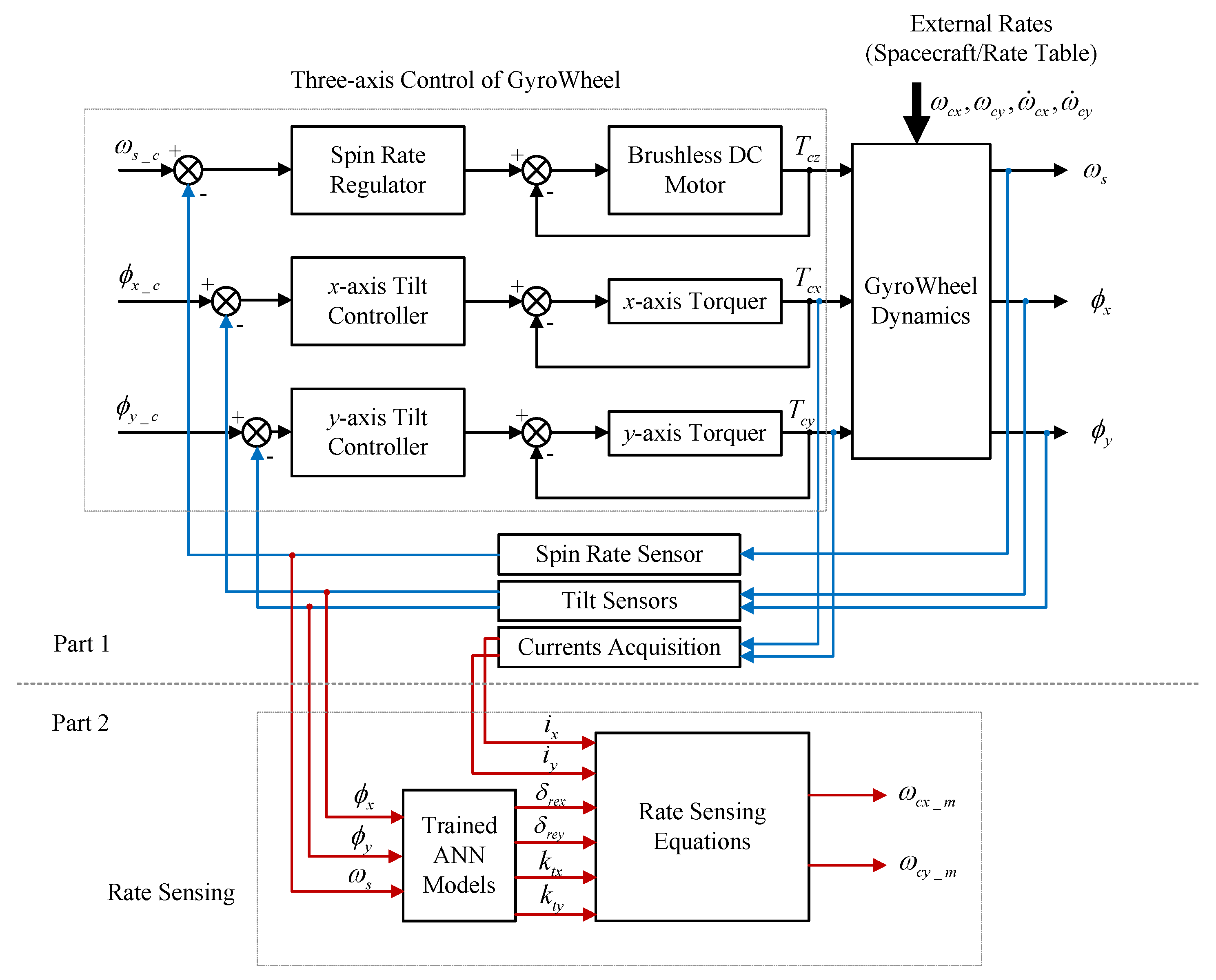
4. GyroWheel Rate Sensing Using Genetic Algorithm Optimized Neural Networks
4.1. Rate Sensing Principle Based on Torque Balance Theory
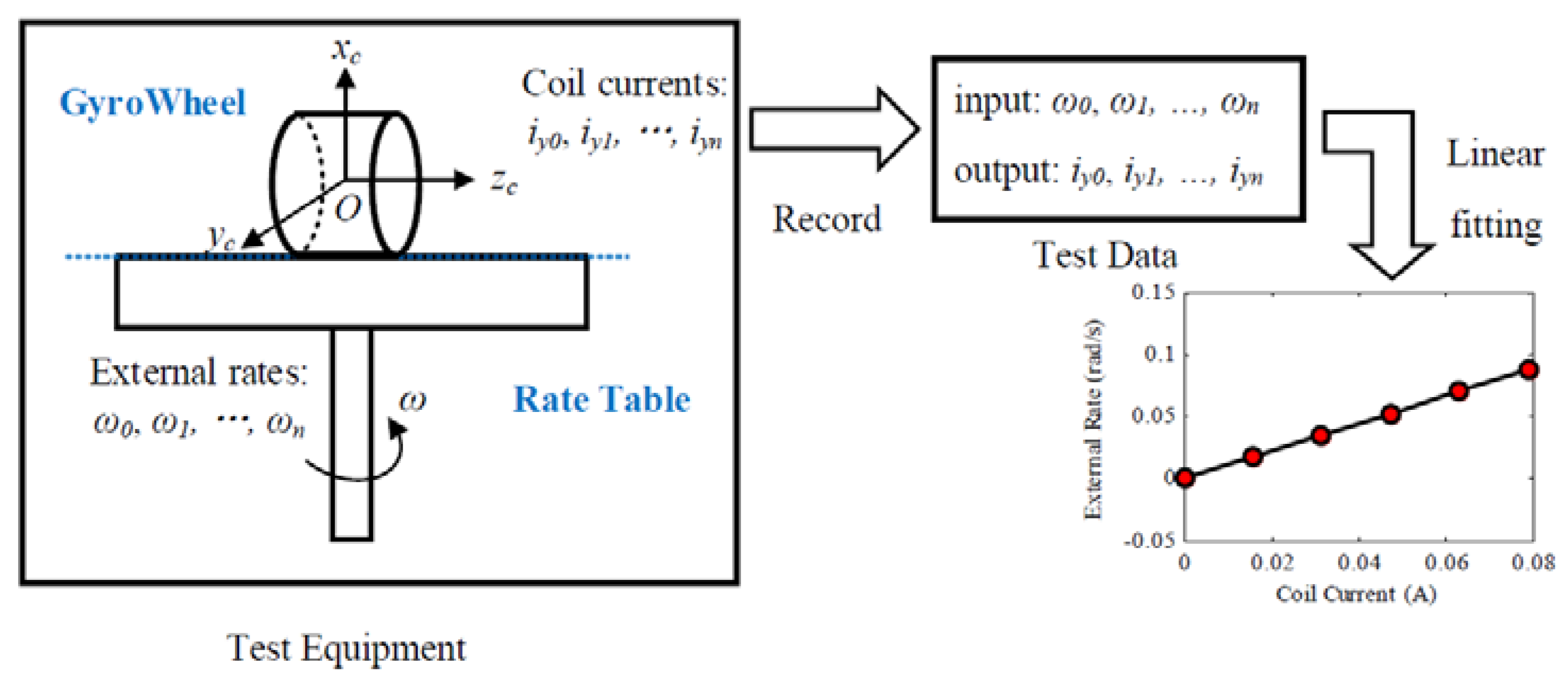
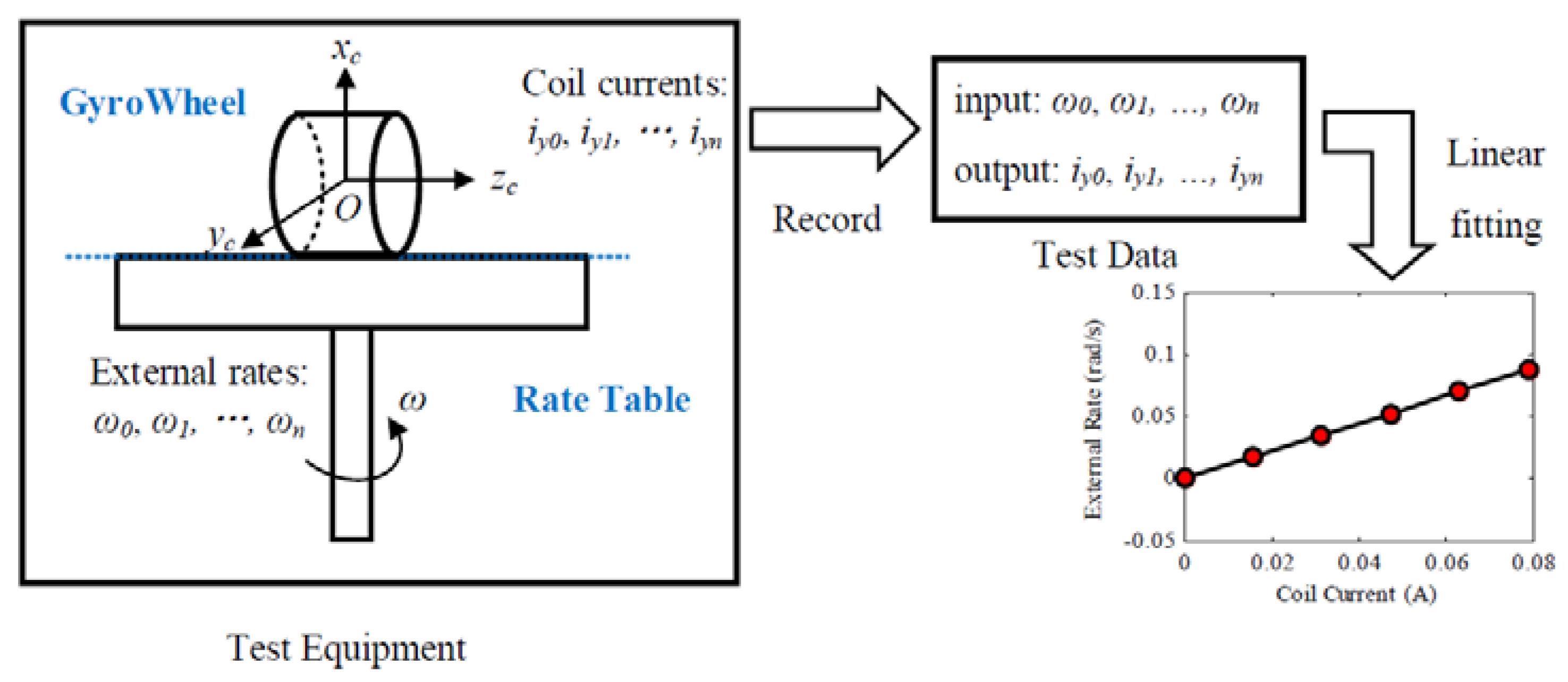
4.2. Identification of Torque Factors and Equivalent Rates
4.3. Rate Sensing Using Genetic Algorithm Optimized Neural Networks
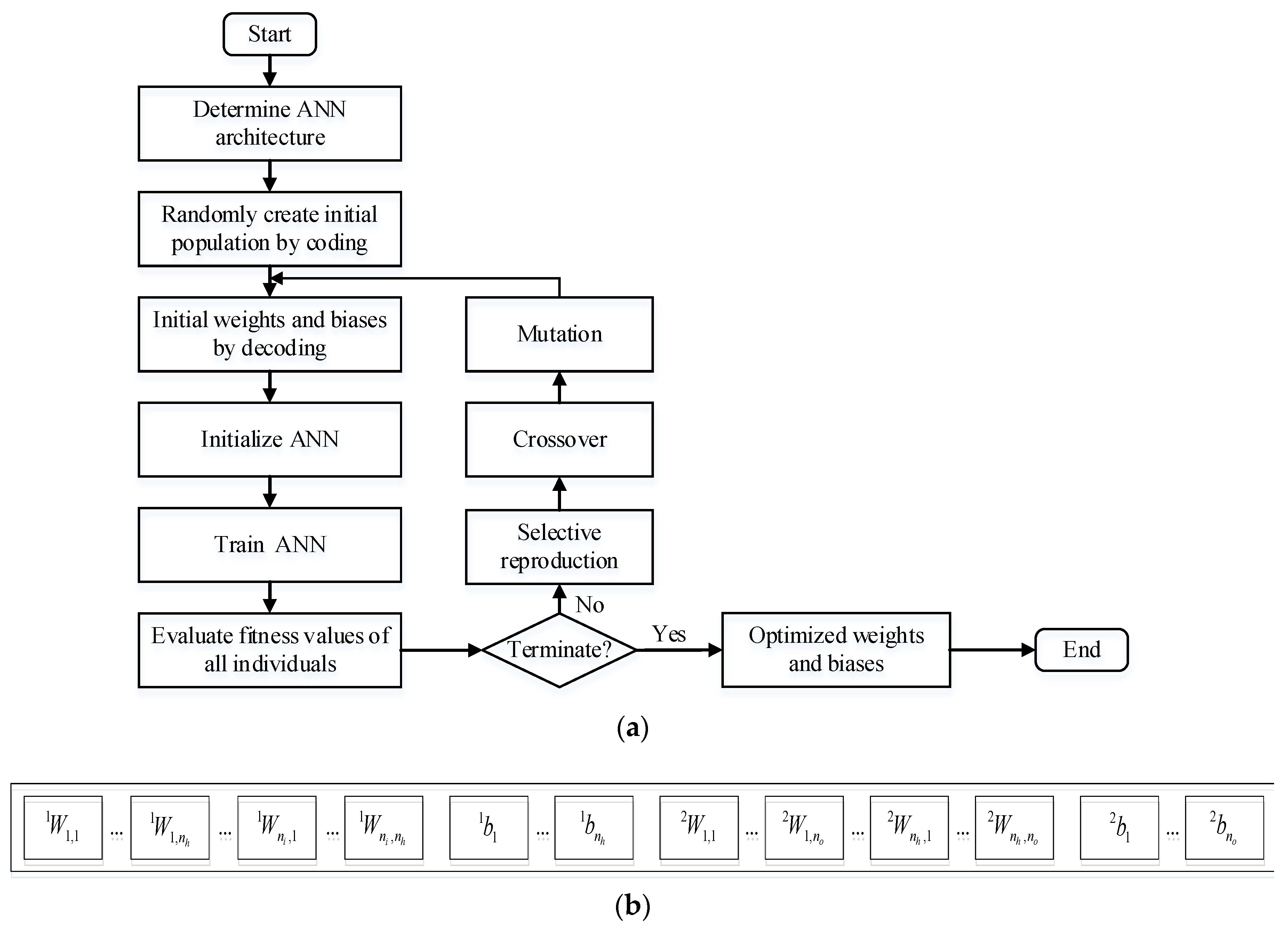
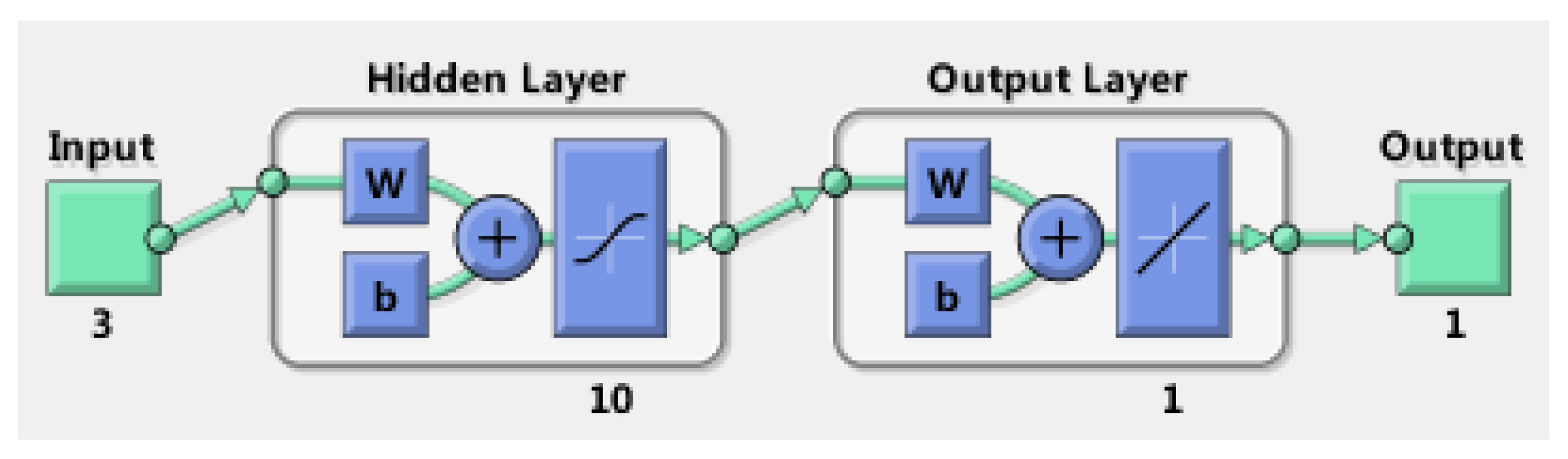
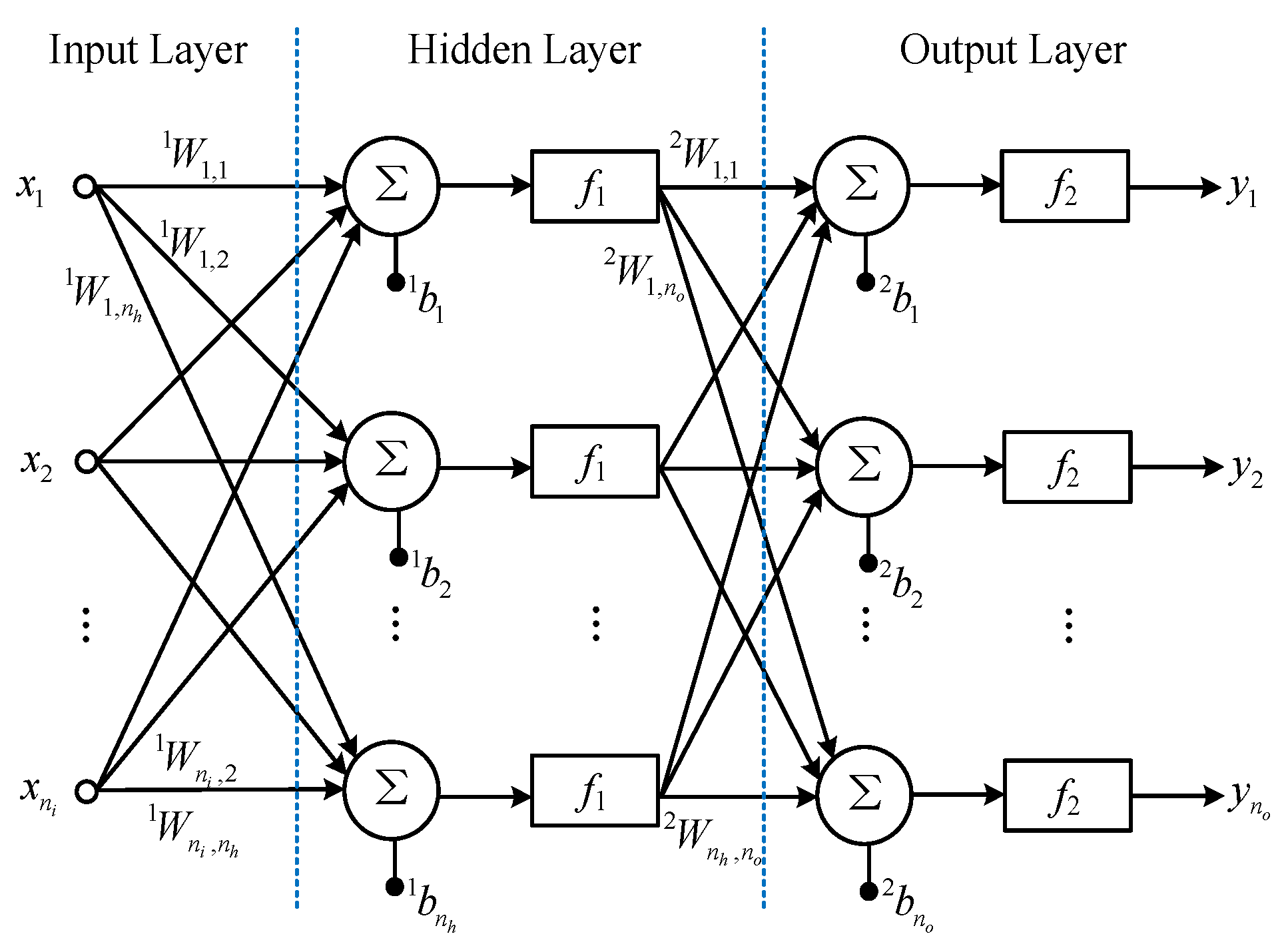
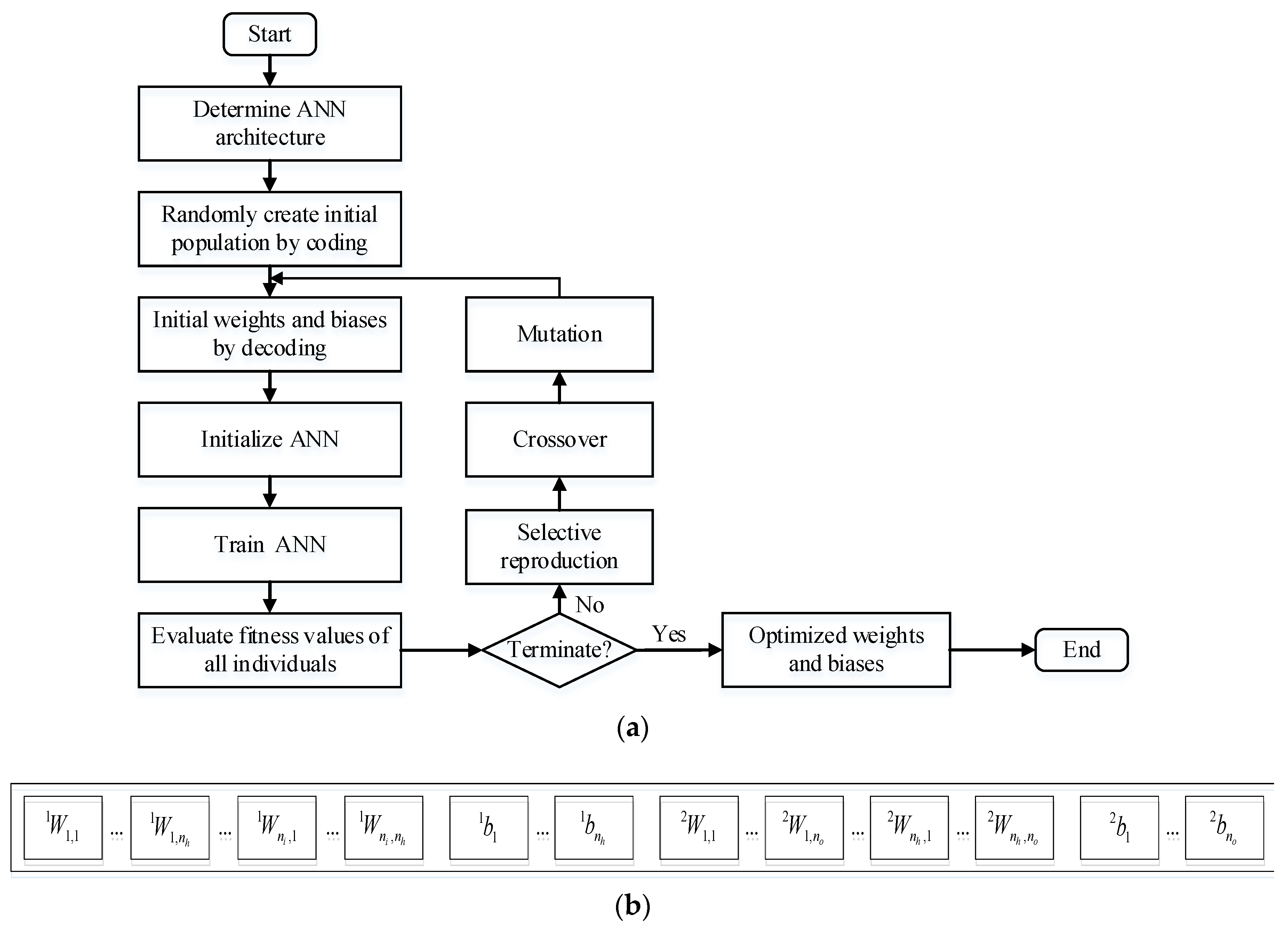
4.3.1. Methodology: Genetic Algorithm Optimized Neural Network

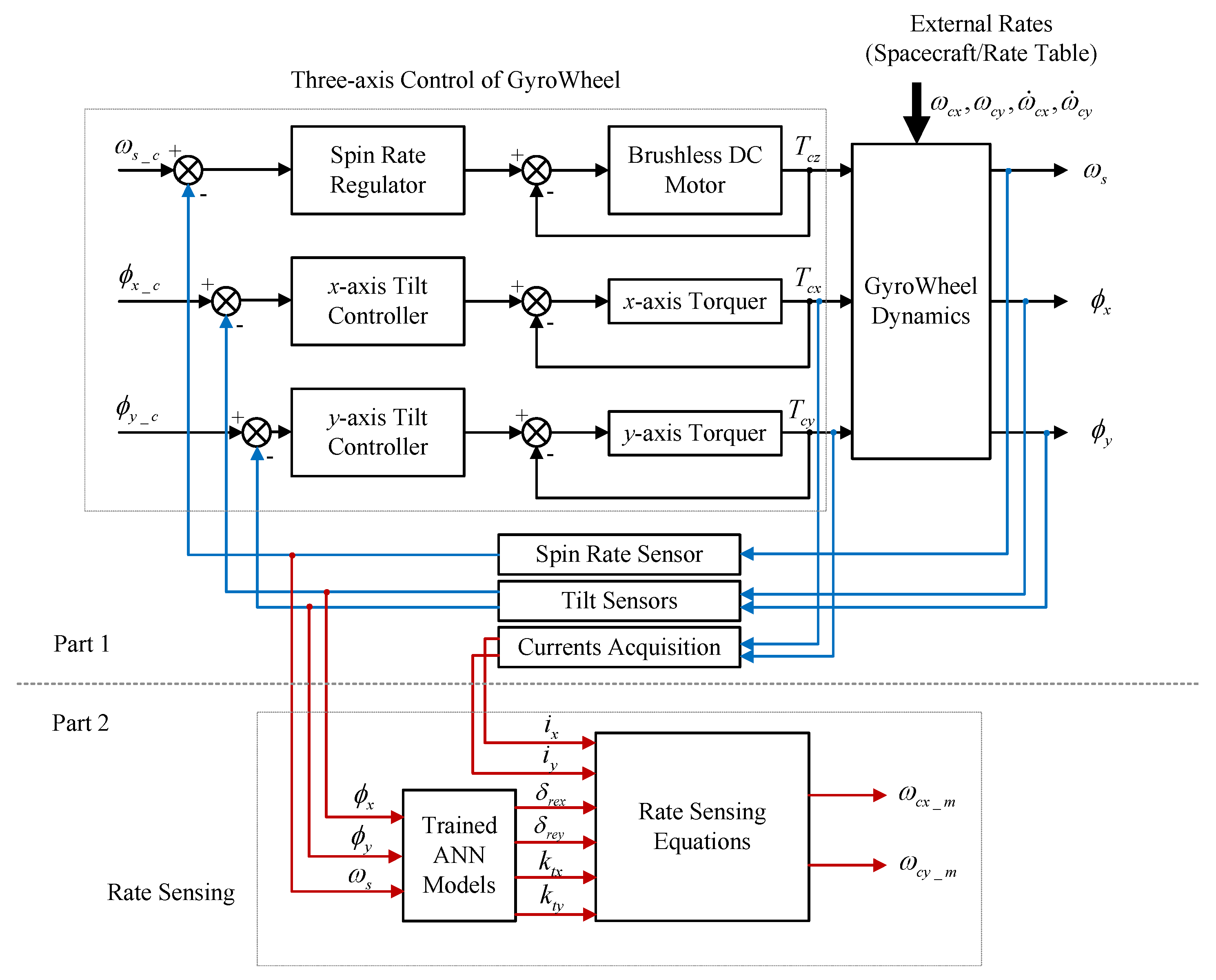
4.3.2. GAANN-Based Rate Sensing for GyroWheel
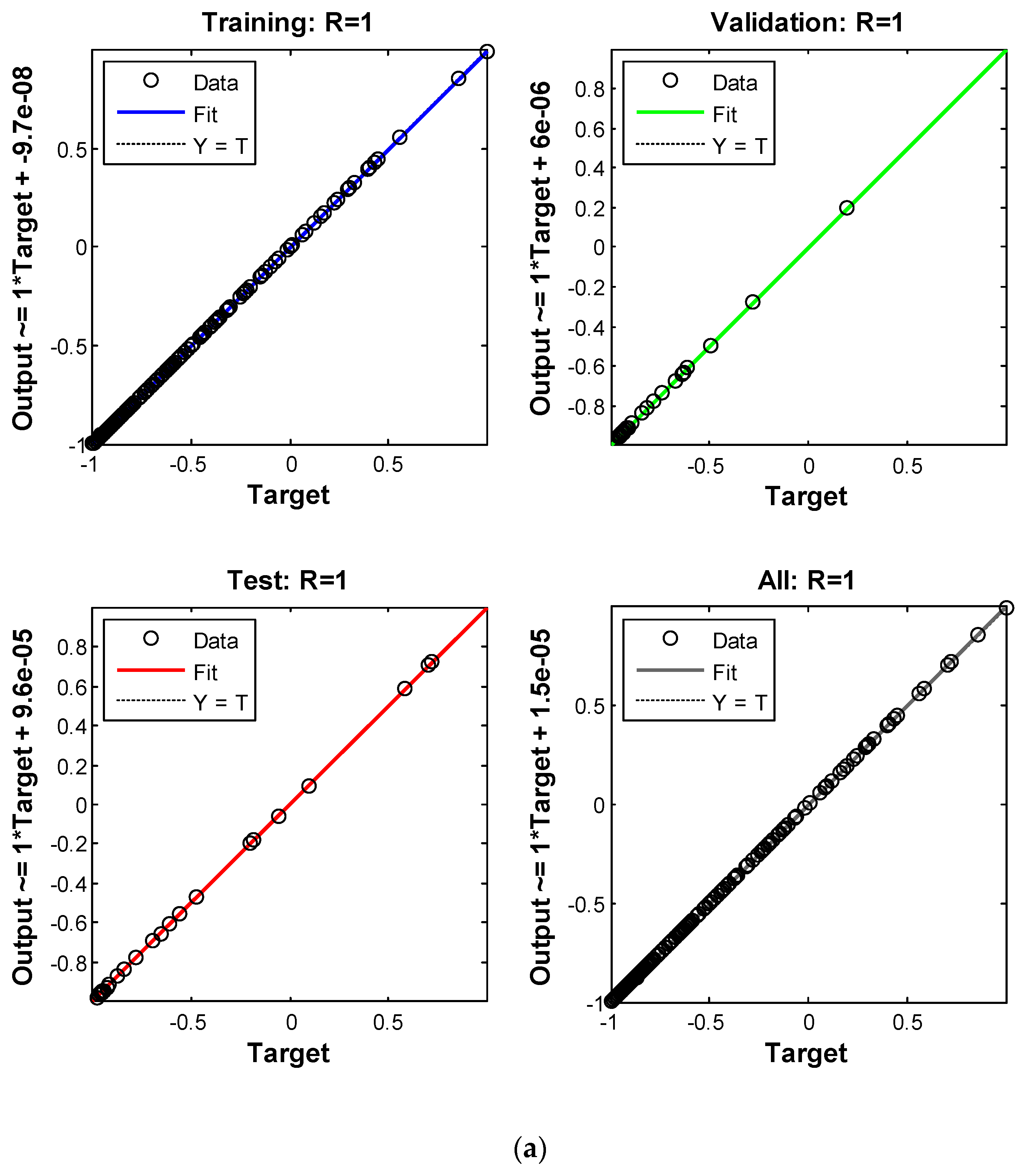
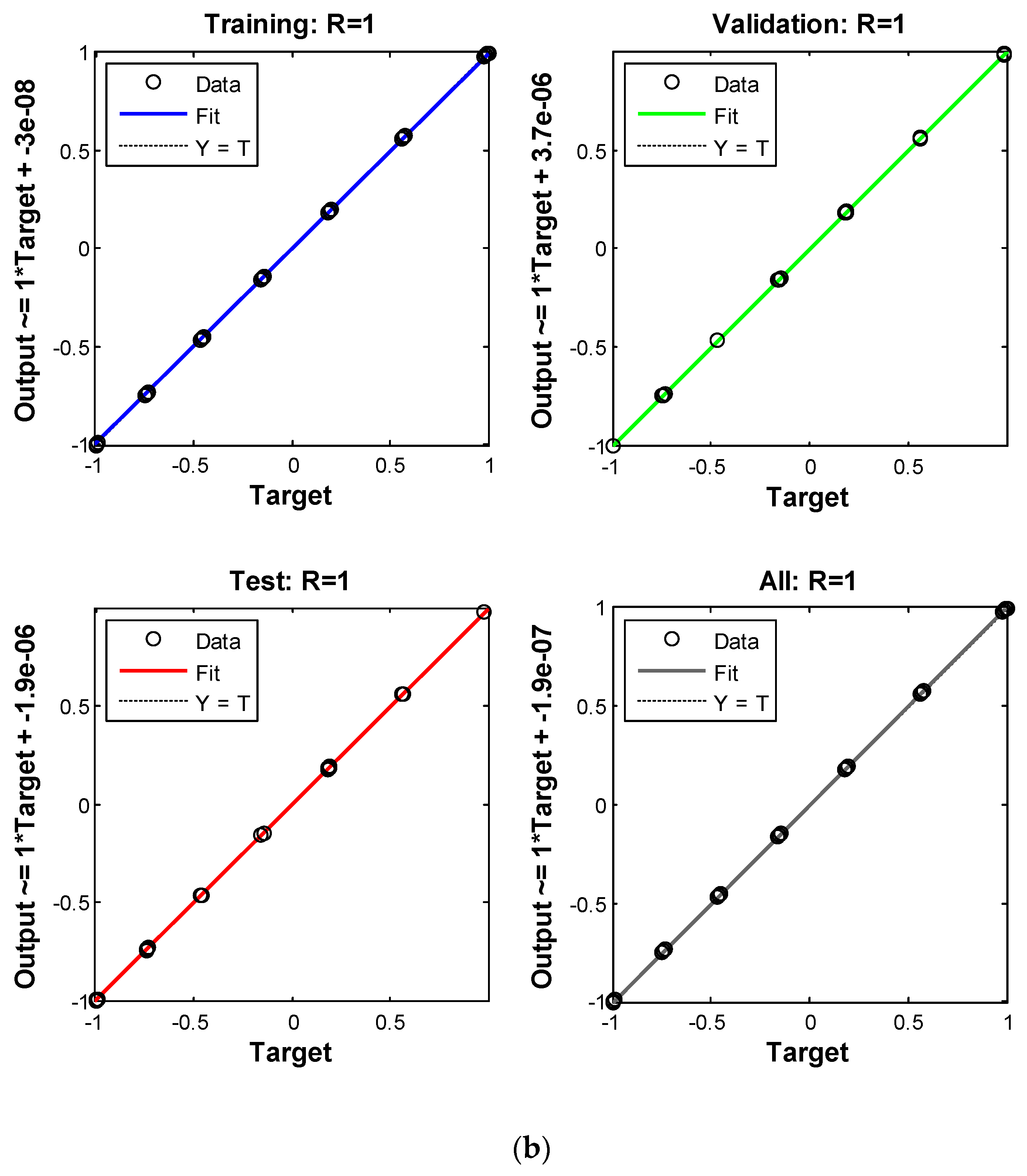
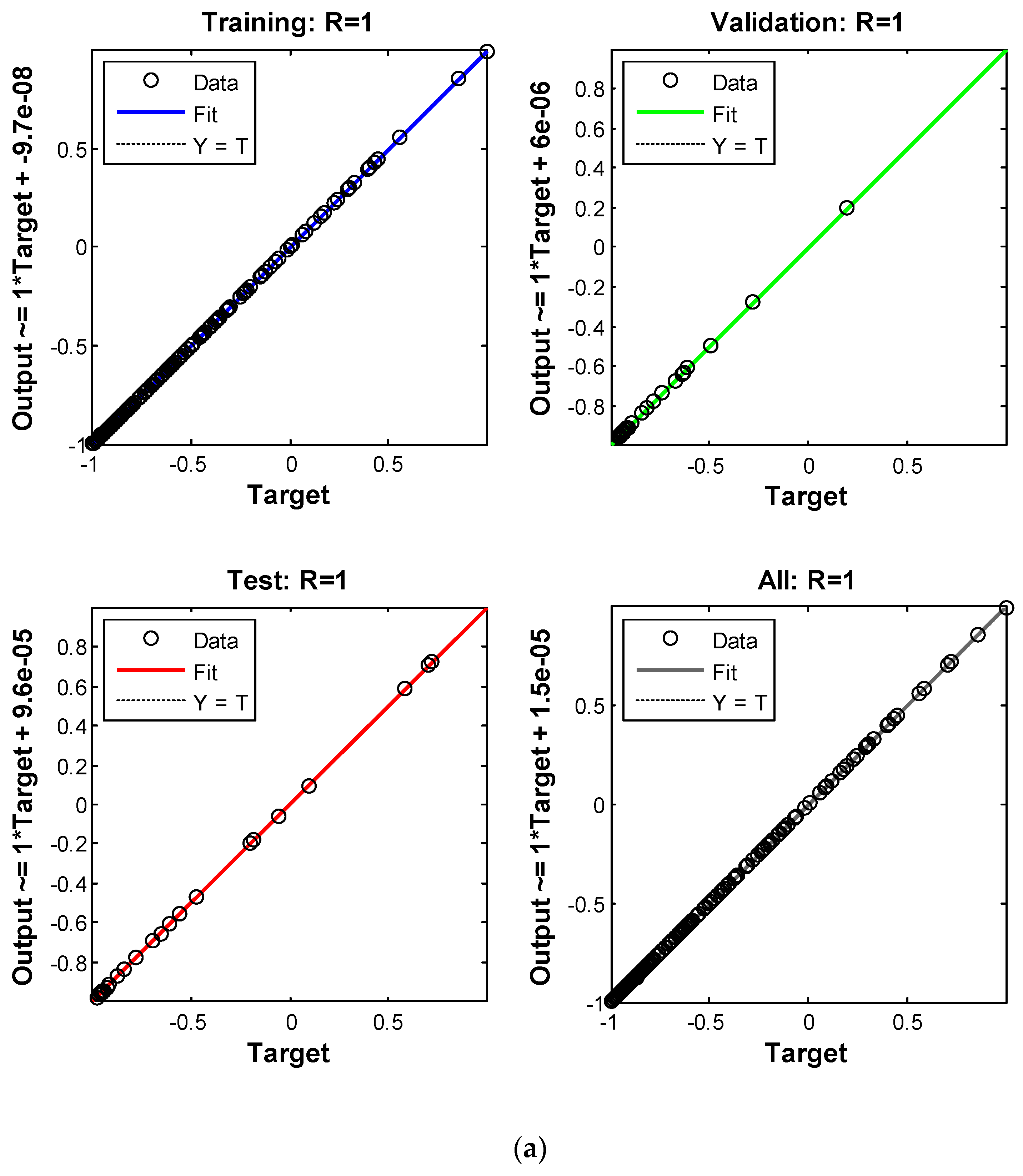
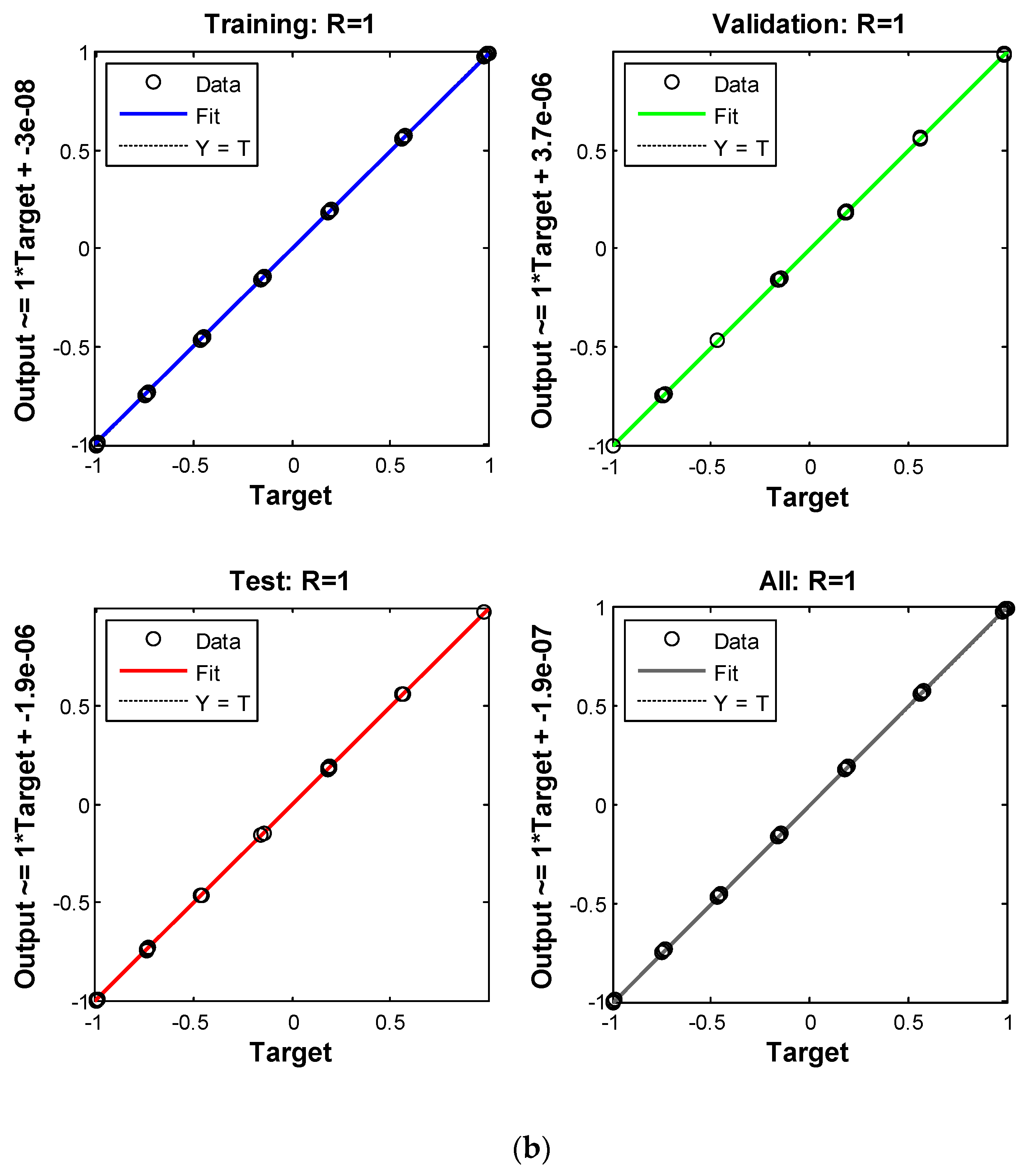
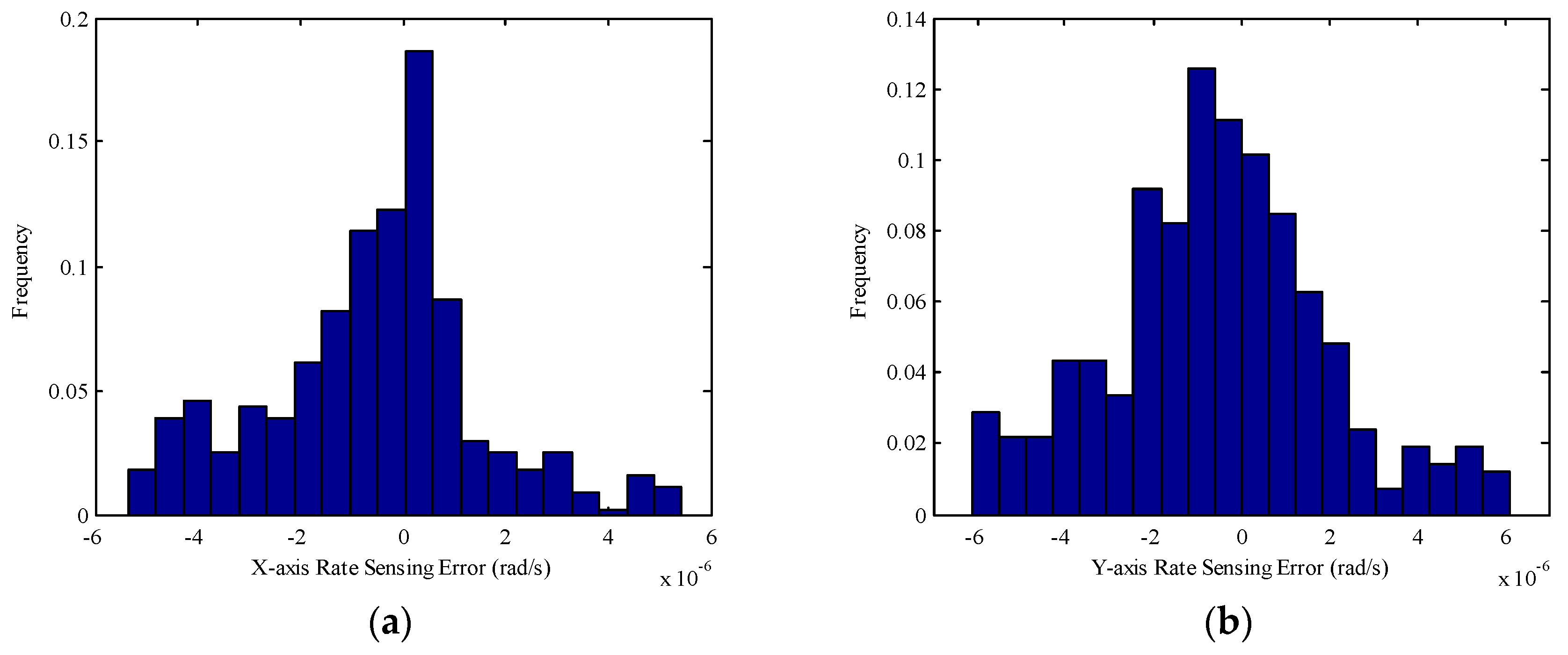
4.3.3. Simulation Results and Analysis
5. Conclusions
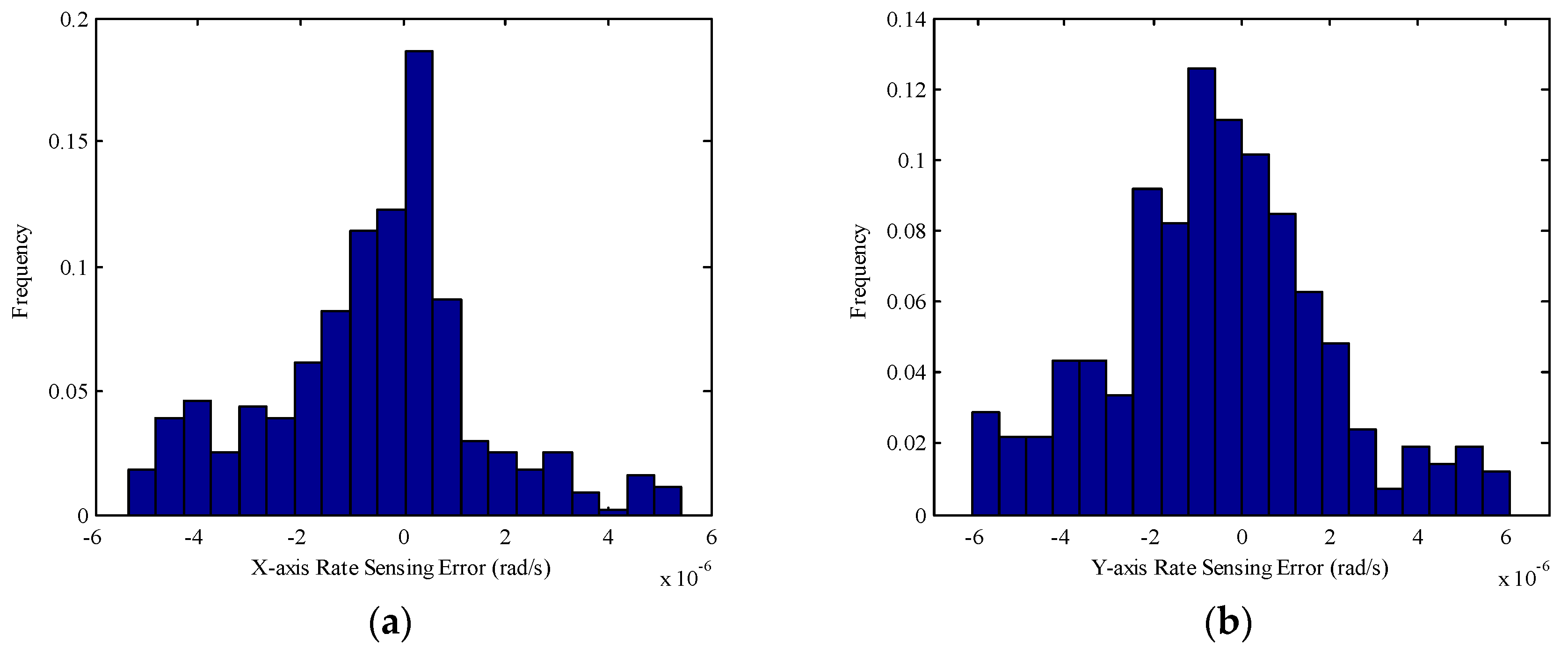
- The GAANN-based method provides a high rate sensing accuracy even under large tilt conditions. Therefore, it can be applied to measure angular rates in the whole operating range of the GyroWheel.
- The GAANN-based method does not depend on the GyroWheel parameters that are difficult to identify. Instead, explicit ANN models are established using experimental data. Once the weights and biases of the ANN models are determined, the spacecraft angular rates can be estimated with the measurable tilt angles, spin rate and coil currents of the GyroWheel.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DTG | Dynamically Tuned Gyroscope |
| ANN | Artificial Neural Network |
| GA | Genetic Algorithm |
| CMG | Control Moment Gyroscope |
| DC | Direct Current |
| MLP | Multi-layer Perception |
| BP | Back-propagation |
| GAANN | Genetic Algorithm Optimized Neural Network |
References
- Bezouska, W.A.; Aherne, M.R.; Barrett, J.T.; Schultz, S.J. Demonstration of Technologies for Autonomous Micro-Satellite Assembly. In Proceedings of the AIAA SPACE 2009 Conference & Exposition, Pasadena, CA, USA, 14–17 September 2009. [Google Scholar]
- Rufino, G.; Grassi, M. Multi-aperture CMOS sun sensor for microsatellite attitude determination. Sensors 2009, 9, 4503–4524. [Google Scholar] [CrossRef] [PubMed]
- Wu, B. Spacecraft Attitude Control with Input Quantization. AIAA J. Guid. Control Dyn. 2015, 39, 176–181. [Google Scholar] [CrossRef]
- Balty, C.; Gayrard, J.D. Flexible Satellites: A New Challenge for the Communication Satellite Industry. In Proceedings of the 25th AIAA International Communications Satellite Systems Conference, Seoul, Korea, 10–13 April 2007. [Google Scholar]
- Liu, B.; Fang, J.; Liu, G. Design of a magnetically suspended gyrowheel and analysis of key technologies. Acta Aeronaut. Astronaut. Sin. 2011, 32, 1478–1487. [Google Scholar]
- Fang, J.; Zheng, S.; Han, B. Attitude sensing and dynamic decoupling based on active magnetic bearing of MSDGCMG. IEEE Trans. Instrum. Meas. 2012, 61, 338–348. [Google Scholar] [CrossRef]
- Tyc, G.; Staley, D.A.; Whitehead, W.R.; Pradhan, S.; Staley, D.; Ower, C.; Cain, J.; Wiktowy, M. GyroWheel™—An Innovative New Actuator/Sensor for 3-axis Spacecraft Attitude Control. In Proceedings of the 13th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 23–26 August 1999. [Google Scholar]
- Ower, J.C. Analysis and Control System Design of an Innovative Tuned-Rotor Instrument. Ph.D. Thesis, Carleton University, Ottawa, ON, Canada, 2000. [Google Scholar]
- Paul, T.H. Development and Testing of a GyroWheel Based Control System for the SCISAT-1 Scientific Satellite. Master Thesis, Carleton University, Ottawa, ON, Canada, 2003. [Google Scholar]
- Titterton, D.H.; Weston, J.L. Gyroscope Technology 1. In Strapdown Inertial Navigation Technology, 2nd ed.; Institution of Electrical Engineers: Stevenage, Herts, UK, 2004; pp. 77–81. [Google Scholar]
- Paquet, F.; Vinnins, M.F.; Gallop, L. Analog Torque Rebalance Loop for a Tuned Rotor Gyroscope. U.S. Patent 5,138,883, 18 August 1992. [Google Scholar]
- Cain, J.S. Investigation of the Crossed Flexure Pivot and the Dynamics of the Momentum Management System Spacecraft Control Component and the Dynamically Tuned Gyroscope. Ph.D. Thesis, Carleton University, Ottawa, ON, Canada, 1999. [Google Scholar]
- Liu, X.; Zhao, H.; Yao, Y.; He, F. Modeling and Analysis of Micro-Spacecraft Attitude Sensing with Gyrowheel. Sensors 2016, 16, 1321. [Google Scholar] [CrossRef] [PubMed]
- Hall, J.M. Calibration of an Innovative Rate Sensing/Momentum Management Instrument for De-Tuned Operation and Temperature Effects. Master Thesis, Carleton University, Ottawa, ON, Canada, 2008. [Google Scholar]
- Zhao, Y.Y.; Zhao, H.; Huo, X. A New Multi-Position Calibration Method for the Gyrowheel Using Multiple Objective Particle Swarm Optimization Algorithm. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Fu, L.; Yang, X.; Wang, L.L. A novel calibration procedure for dynamically tuned gyroscope designed by D-optimal approach. Measurement 2013, 46, 3173–3180. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks—A Comprehensive Foundation; Prentice Hall Inc.: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Duda, R.O.; Hart, P.E.; Stork, D.G. Pattern Classification, 2nd ed.; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Fortuna, L.; Graziani, S.; Xibilia, M.G. Comparison of Soft-Sensor Design Methods for Industrial Plants Using Small Data Sets. IEEE Trans. Instrum. Meas. 2009, 58, 2444–2451. [Google Scholar] [CrossRef]
- Duchanoy, C.A.; Moreno-Armendáriz, M.A.; Urbina, L.; Cruz-Villar, C.A.; Calvo, H.; de J.Rubio, J. A Novel Recurrent Neural Network Soft Sensor via a Differential Evolution Training Algorithm for the Tire Contact Patch. Neurocomputing 2017, 235, 71–82. [Google Scholar] [CrossRef]
- Fornarelli, G.; Mescia, L.; Prudenzano, F.; De Sario, M.; Vacca, F. A neural network model of erbium-doped photonic crystal fibre amplifiers. Opt. Laser Technol. 2009, 41, 580–585. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Roke, D.A. Assessment of artificial neural network and genetic programming as predictive tools. Adv. Eng. Softw. 2015, 88, 63–72. [Google Scholar] [CrossRef]
- Meng, J.L.; Sun, Z.Y. Application of combined neural networks in nonlinear function approximation. In Proceedings of the 3rd World Congress on Intelligent Control and Automation, Hefei, China, 26 June–2 July 2000. [Google Scholar]
- Ledesma, S.; Torres, M.; Hernández, D.; Aviña, G.; García, G. Temperature cycling on simulated annealing for neural network learning. In Proceedings of the MICAI 2007: Advances in Artificial Intelligence, Aguascalientes, Mexico, 4–10 November 2007; pp. 161–171. [Google Scholar]
- Unal, M.; Onat, M.; Demetgul, M.; Kucuk, H. Fault diagnosis of rolling bearings using a genetic algorithm optimized neural network. Measurement 2014, 58, 187–196. [Google Scholar] [CrossRef]
- Belman-Flores, J.M.; Ledesma, S.E.; Garcia, M.G.; Ruiz, J.; Rodríguez-Muñoz, J.L. Analysis of a variable speed vapor compression system using artificial neural networks. Expert Syst. Appl. 2013, 40, 4362–4369. [Google Scholar] [CrossRef]
- IEEE STD 813-1988. IEEE Specification Format Guide and Test Procedure for Two-Degree-of-Freedom Dynamically Tuned Gyros; IEEE: New York, NY, USA, 1989.
- Hagan, M.T.; Menhaj, M.B. Training feed forward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feed forward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Rotor transverse inertia Irt | 3.458 × 10−3 kg·m2 |
| Rotor spin inertia Irs | 6.402 × 10−3 kg·m2 |
| Gimbal transverse inertia Igt | 1.276 × 10−5 kg·m2 |
| Gimbal spin inertia Igs | 1.805 × 10−5 kg·m2 |
| Stiffness coefficients Kx, Ky | 0.092 Nm/rad |
| Damping coefficient Cg | 3.100 × 10−8 Nm/(rad/s) |
| Tile range | |
| Range of spin rate | 133.52 rad/s ≤ ≤ 180.64 rad/s |
| Parameters | Small Tilt () | Large Tilt () | ||
|---|---|---|---|---|
| Igt | 3.137 × 10−4 | 3.137 × 10−4 | 2.510 × 10−3 | 2.510 × 10−3 |
| Igs | 2.220 × 10−4 | 2.220 × 10−4 | 1.776 × 10−3 | 1.776 × 10−3 |
| Irs | 1.019 × 10−4 | 1.019 × 10−4 | 8.150 × 10−4 | 8.150 × 10−4 |
| Kx | 4.690 × 10−5 | 4.690 × 10−5 | 3.752 × 10−4 | 3.752 × 10−4 |
| Ky | 4.690 × 10−5 | 4.690 × 10−5 | 3.752 × 10−4 | 3.752 × 10−4 |
| Cg | 4.220 × 10−9 | 4.220 × 10−9 | 3.376 × 10−8 | 3.376 × 10−8 |
| Parameters | Values |
|---|---|
| Coding type | Real coding |
| Population size | 100 |
| Iterations | 50 |
| Selection operator | Roulette-wheel selection |
| Crossover probability | 60% |
| Mutation probability | 0.5% |
| Parameters | Values |
|---|---|
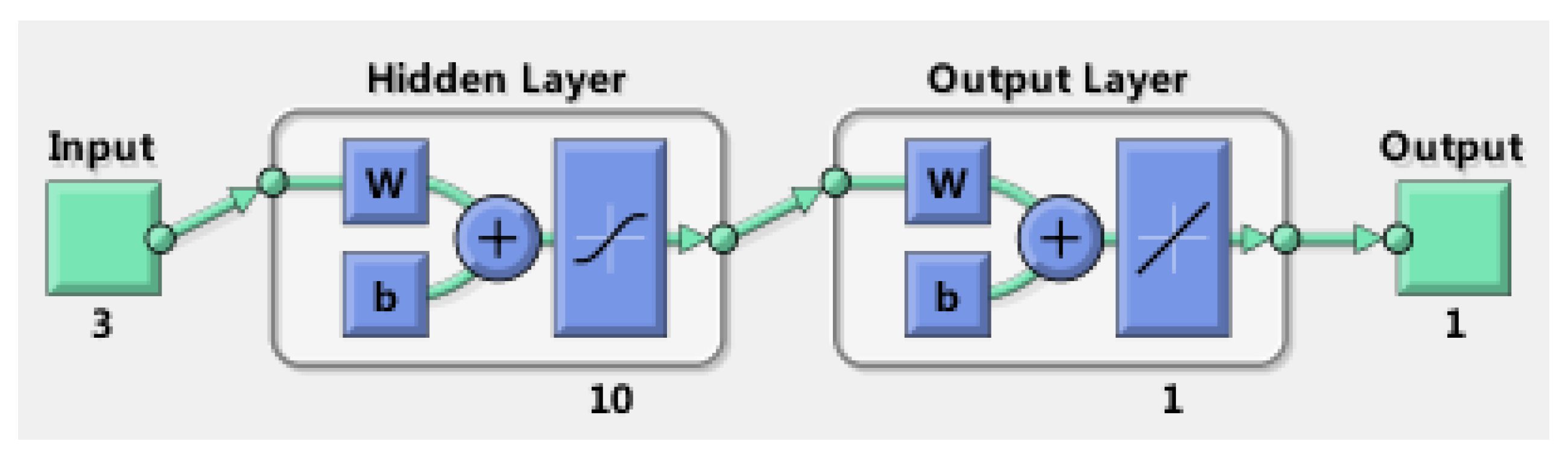
| Number of hidden neurons | 10 |
| Epochs | 2000 |
| Training algorithm | Bayesian regulation back-propagation |
| Activation function of hidden layer | tan-sigmoid |
| Activation function of output layer | purelin (linear transfer function) |
| ANN | MSE Values | ||
|---|---|---|---|
| Training | Validation | Testing | |
| 1 | 1.1142 × 10−8 | 7.3956 × 10−9 | 1.5940 × 10−8 |
| 2 | 7.7689 × 10−9 | 1.6244 × 10−8 | 1.0707 × 10−8 |
| 3 | 1.7201 × 10−9 | 9.4487 × 10−10 | 7.4277 × 10−10 |
| 4 | 5.8538 × 10−10 | 8.4108 × 10−10 | 1.2611 × 10−9 |
| ANN | Weights between Input and Hidden Layer | Biases of Hidden Layer | Weights between Hidden and Output Layer | Biases of Output Layer |
|---|---|---|---|---|
| 1 | 0.0100, 0.5545, 0.0777; 0.1455, 0.4150, −0.1270; 0.0704, −0.3346, −0.0711; −0.0391, −0.7435, −0.0994; 0.1792, −0.4262, 0.0458; 0.2559, −0.0055, −0.0170; 0.2264, −0.2593, 0.0561; −0.2273, −0.3106, 0.0165; 0.2551, 0.2819, 0.0432; −0.2071, 0.2051, 0.0241. | −0.5267; −1.4775; −0.3092; 1.7672; −1.4598; −0.7754; 0.4807; −0.6000; −0.2493; −0.1981. | 5.0975, −7.1387, −8.8096, −9.8384, −7.3076, 10.6156, −5.8899, 6.0972, −5.9602, −16.2299. | 3.7141 |
| 2 | 0.5141, −0.3526, 0.0901; 0.2502, 0.0662, −0.0692; −0.7629, 0.4477, 0.0198; 0.3041, 0.1787, −0.0073; −0.6078, −0.2979, −0.1073; 0.3246, 0.1595, −0.0853; −0.4315, 0.3101, −0.0164; 0.1087, −0.0002, 0.1244; −0.4581, 0.2426, 0.0308; 0.2989, −0.0997, −0.2243. | −1.9411; 0.8813; −1.1333; 0.3888; 1.4684; −0.1584; −0.8051; −0.1484; −0.2198; −1.6234. | −5.3511, −10.8303, −1.5636, 8.1233, 4.6847, −4.7499, 4.5676, −4.1065, −3.9801, 2.6404. | −2.1126 |
| 3 | 0.1551, 0.0128, 0.2639; 0.0151, 0.0003, −0.3749; −0.3603, −0.0390, −0.4786; 0.0009, 0.0318, −0.3257; 0.0303, 0.0207, −0.9521; 0.0565, 0.0221, 0.2269; −0.1718, −0.0120, −0.2306; −0.0226, −0.0192, 0.6862; 0.0200, −0.1314, −0.2398; −0.0373, −0.0052, 0.2146. | 0.1712; 0.2737; 0.1333; 0.3065; −1.7030; −0.2572; −0.5986; 0.4407; −1.0285; −0.1963. | 0.5813, 0.6213, 0.0341, 0.5309, 0.9480, −0.4722, 0.6712, −0.4977, 0.2949, −0.4503. | 0.8952 |
| 4 | 0.0064, −0.0065, 0.3470; 0.0150, −0.0038, 0.6597; 0.0137, −0.0044, 0.8656; −0.0123, −0.0312, 0.1601; −0.0019, 0.0316, −0.0801; 0.0036, −0.0433, −0.3119; −0.0196, 0.1975, 0.0048; −0.1069, −0.0316, 0.1904; −0.0218, 0.1599, 0.1726; 0.0258, −0.0250, 0.2503. | −0.1904; 0.4451; 1.6821; −0.3732; 0.1029; 0.1148; 0.4758; 0.9927; 0.0577; −0.2785. | −0.5990, −0.4535, −1.1659, −0.6272, 0.2505, 0.5259, −0.3702, −0.4228, 0.2553, −0.5580. | 1.0207 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Zhao, H.; Huo, X.; Yao, Y. Angular Rate Sensing with GyroWheel Using Genetic Algorithm Optimized Neural Networks. Sensors 2017, 17, 1692. https://doi.org/10.3390/s17071692
Zhao Y, Zhao H, Huo X, Yao Y. Angular Rate Sensing with GyroWheel Using Genetic Algorithm Optimized Neural Networks. Sensors. 2017; 17(7):1692. https://doi.org/10.3390/s17071692
Chicago/Turabian StyleZhao, Yuyu, Hui Zhao, Xin Huo, and Yu Yao. 2017. "Angular Rate Sensing with GyroWheel Using Genetic Algorithm Optimized Neural Networks" Sensors 17, no. 7: 1692. https://doi.org/10.3390/s17071692