Automatic Detection and Classification of Pole-Like Objects for Urban Cartography Using Mobile Laser Scanning Data



Abstract
:1. Introduction
2. Materials and Methods
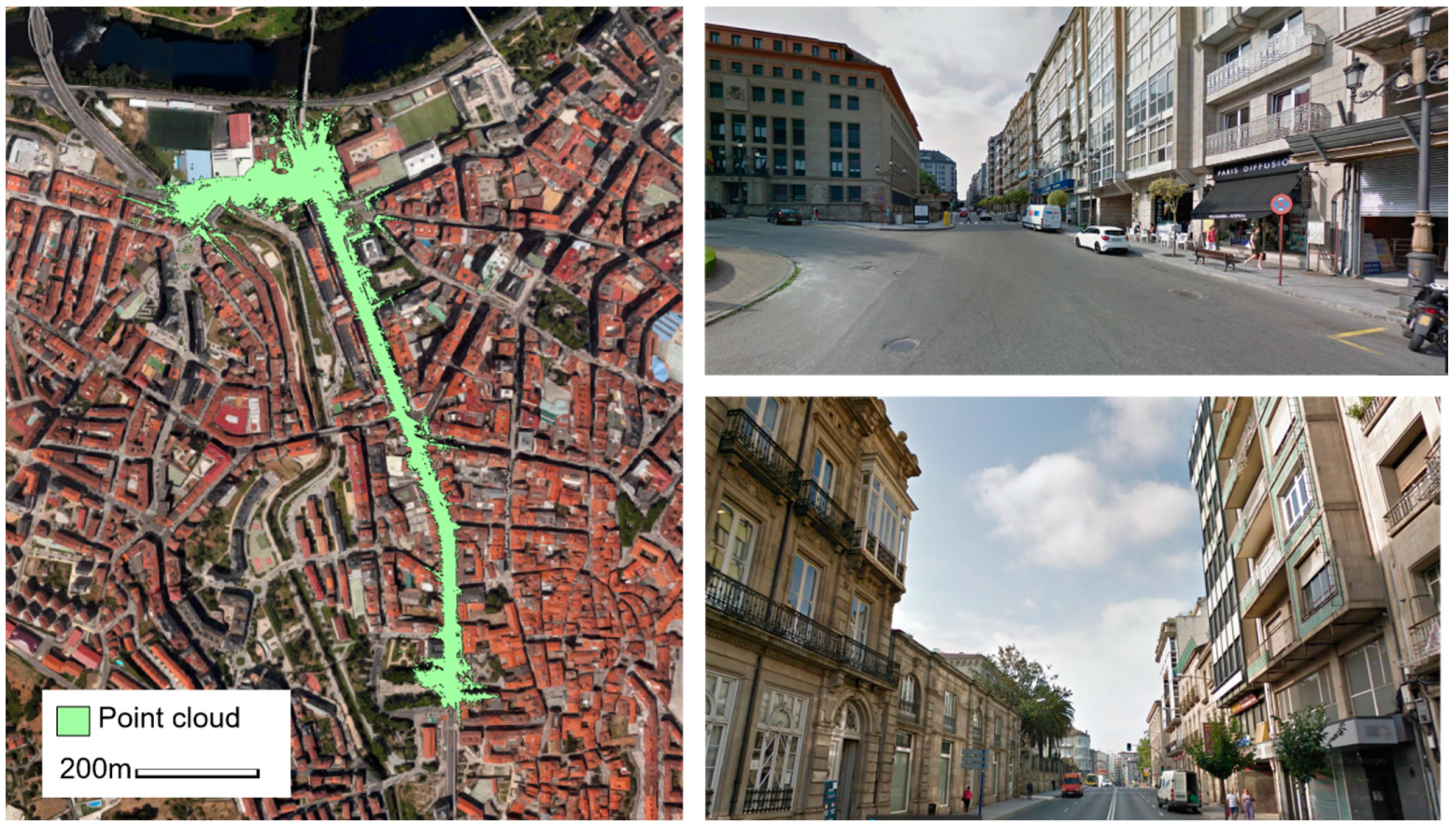
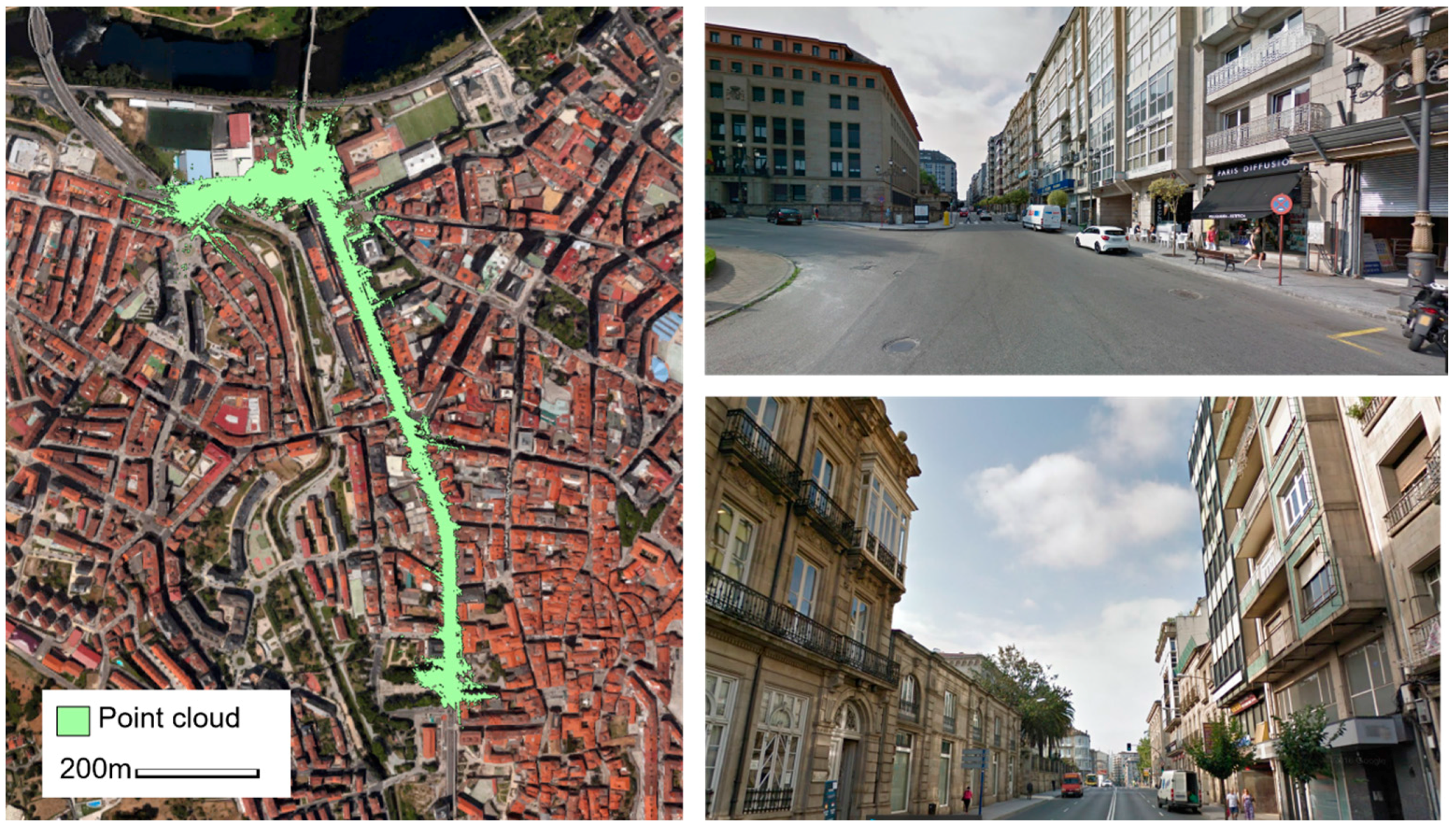
2.1. Data Acquisition
2.2. Point Cloud Segmentation and Classification
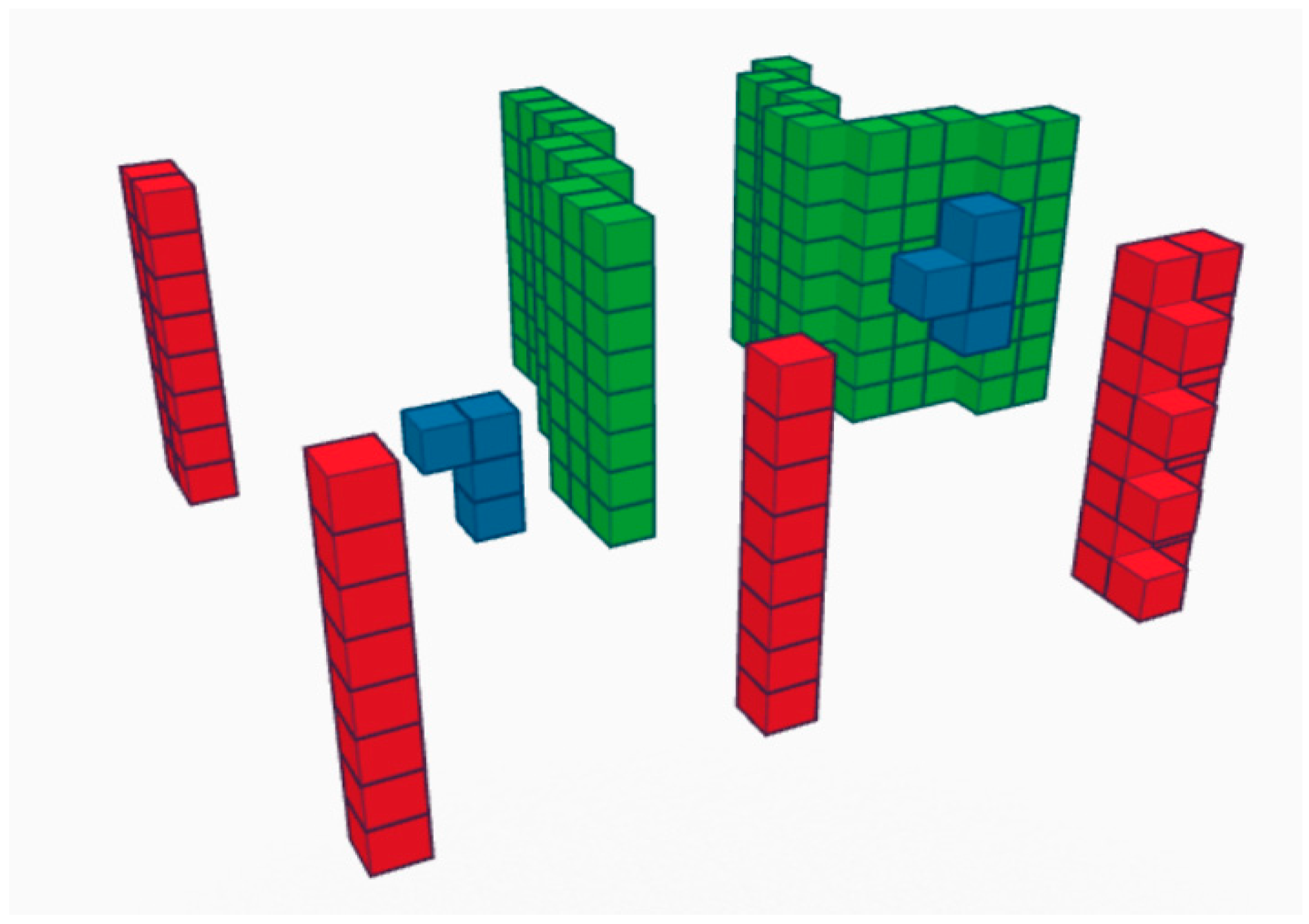
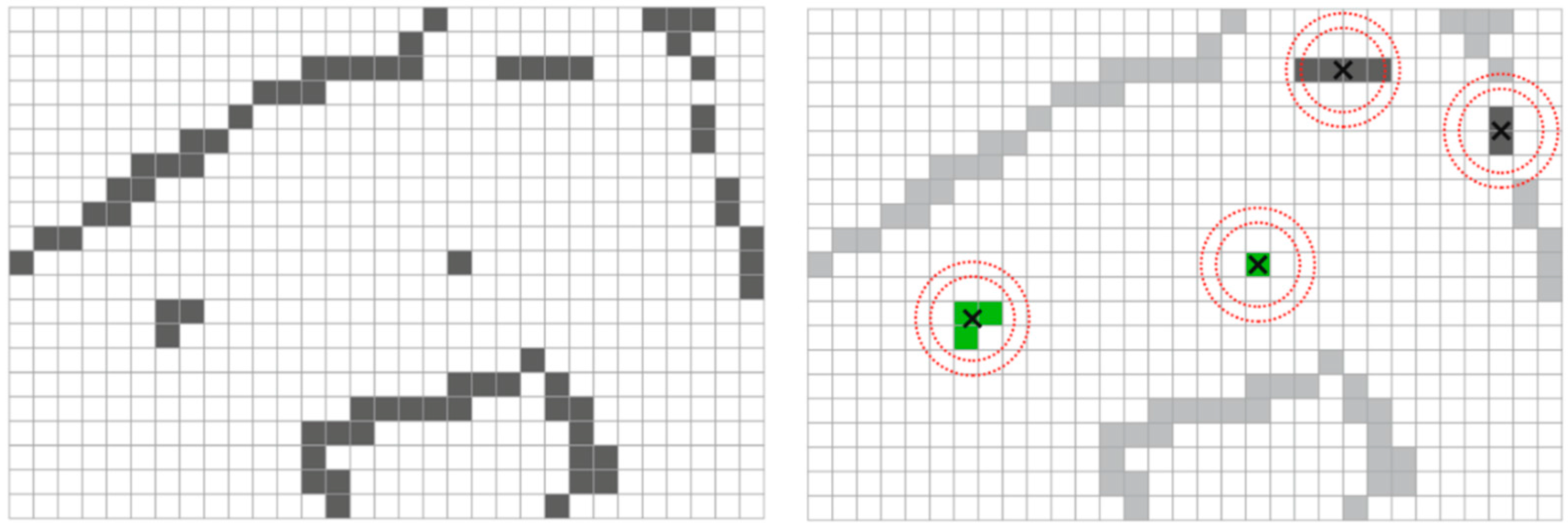
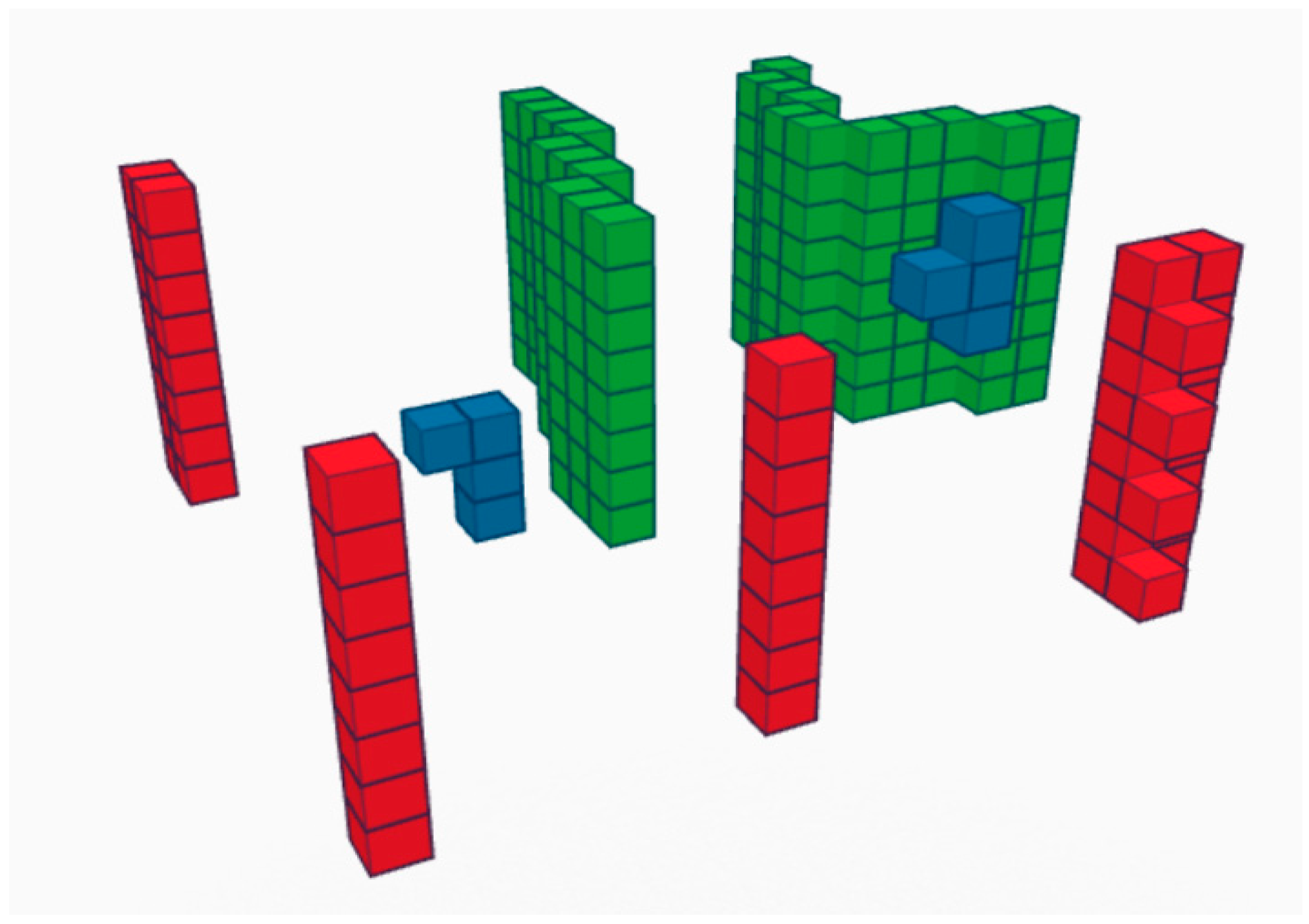
2.2.1. Segmentation
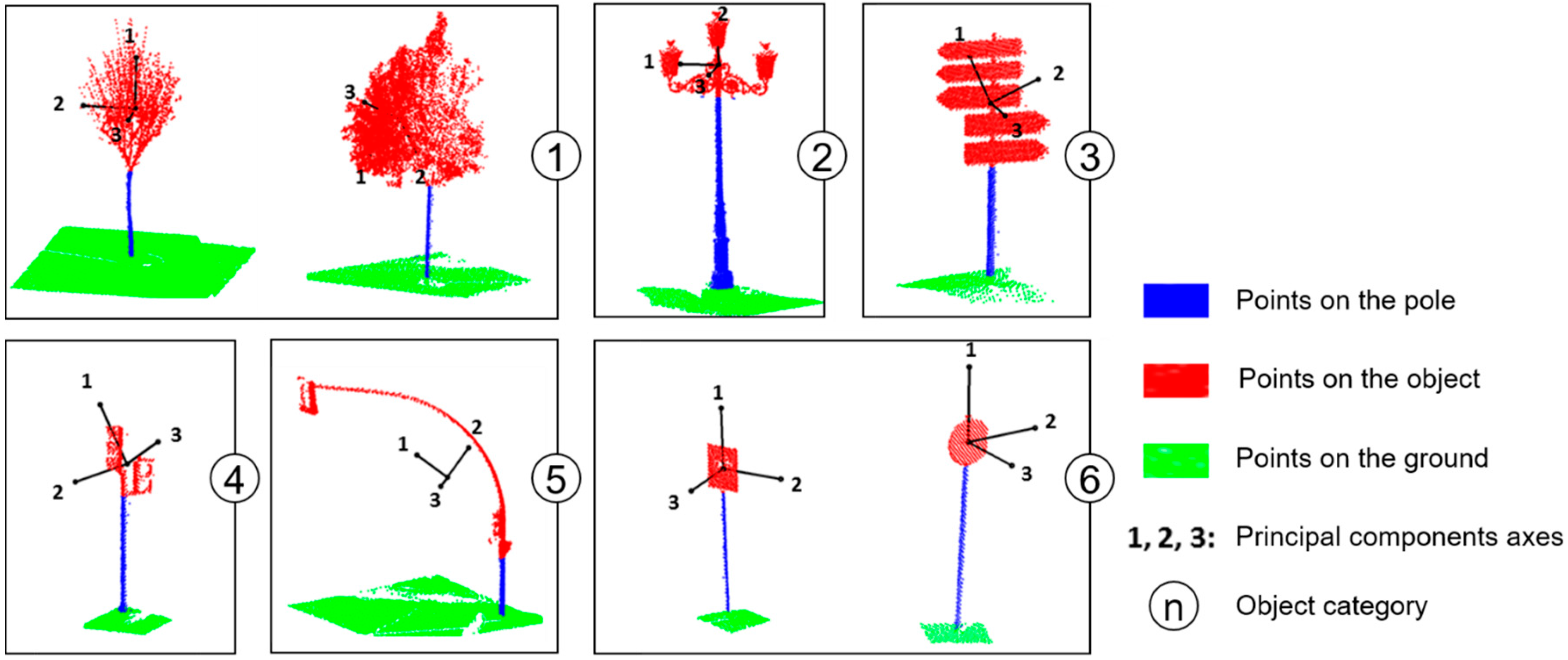
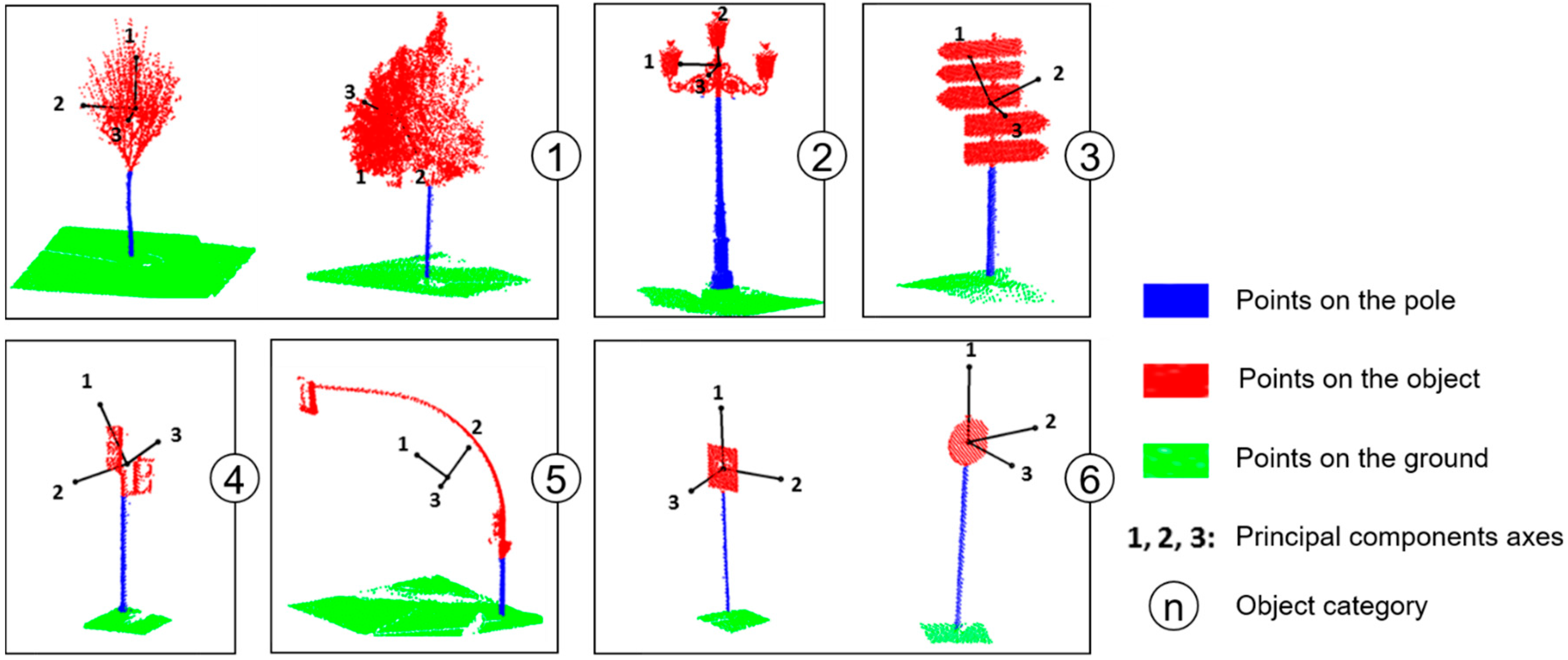
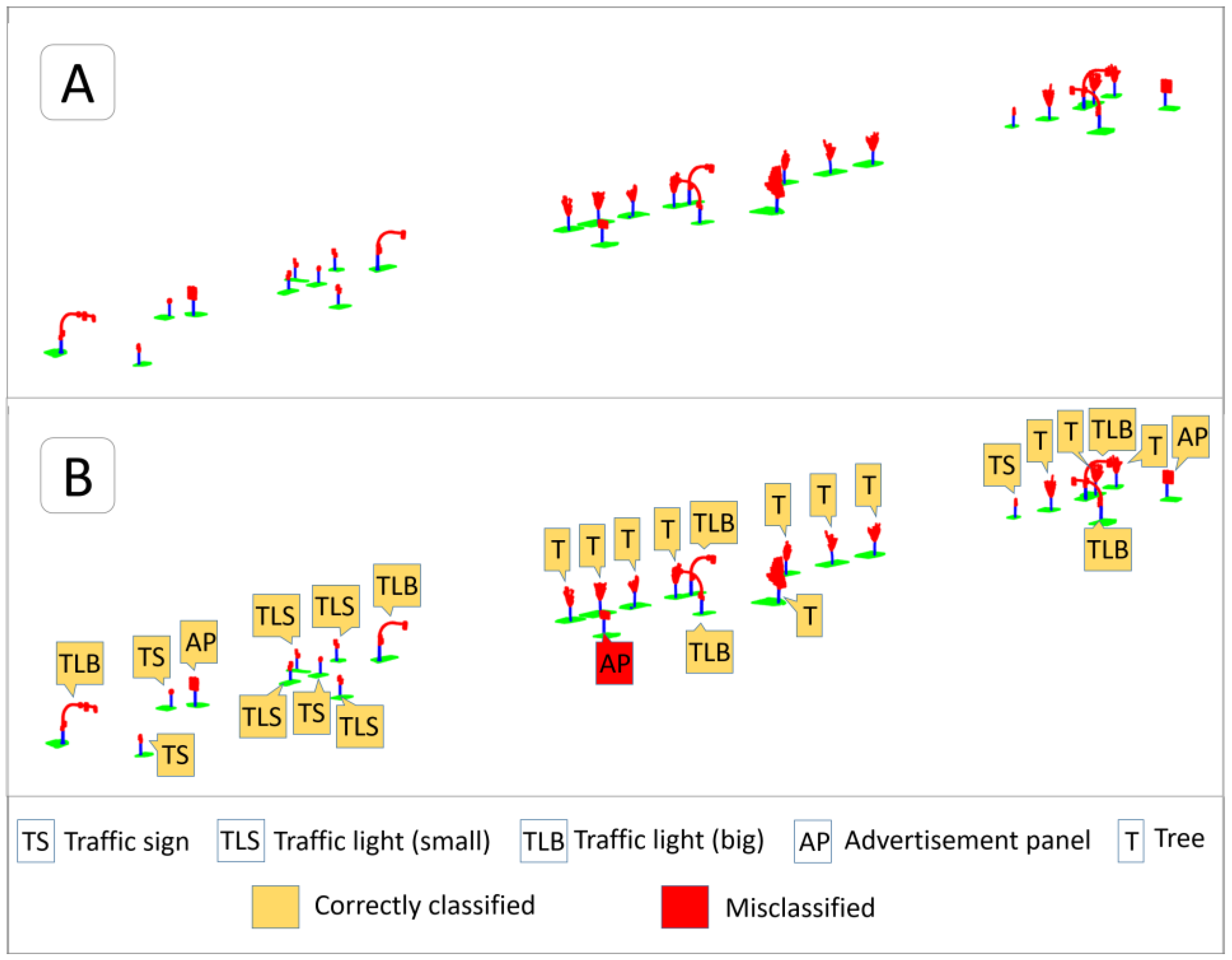
2.2.2. Classification
Methods
Predictor Variables
- . Discriminates between small (traffic signals) and large objects (lampposts, advertising signals).
- . Discriminates flat elements (traffic signals) from other objects.
- . Distinguishes narrow objects, such as traffic signals, from wider elements with similar values of , such as lampposts.
- . This variable discriminates between volumetric objects (trees) and flatter objects (traffic signals or lampposts).
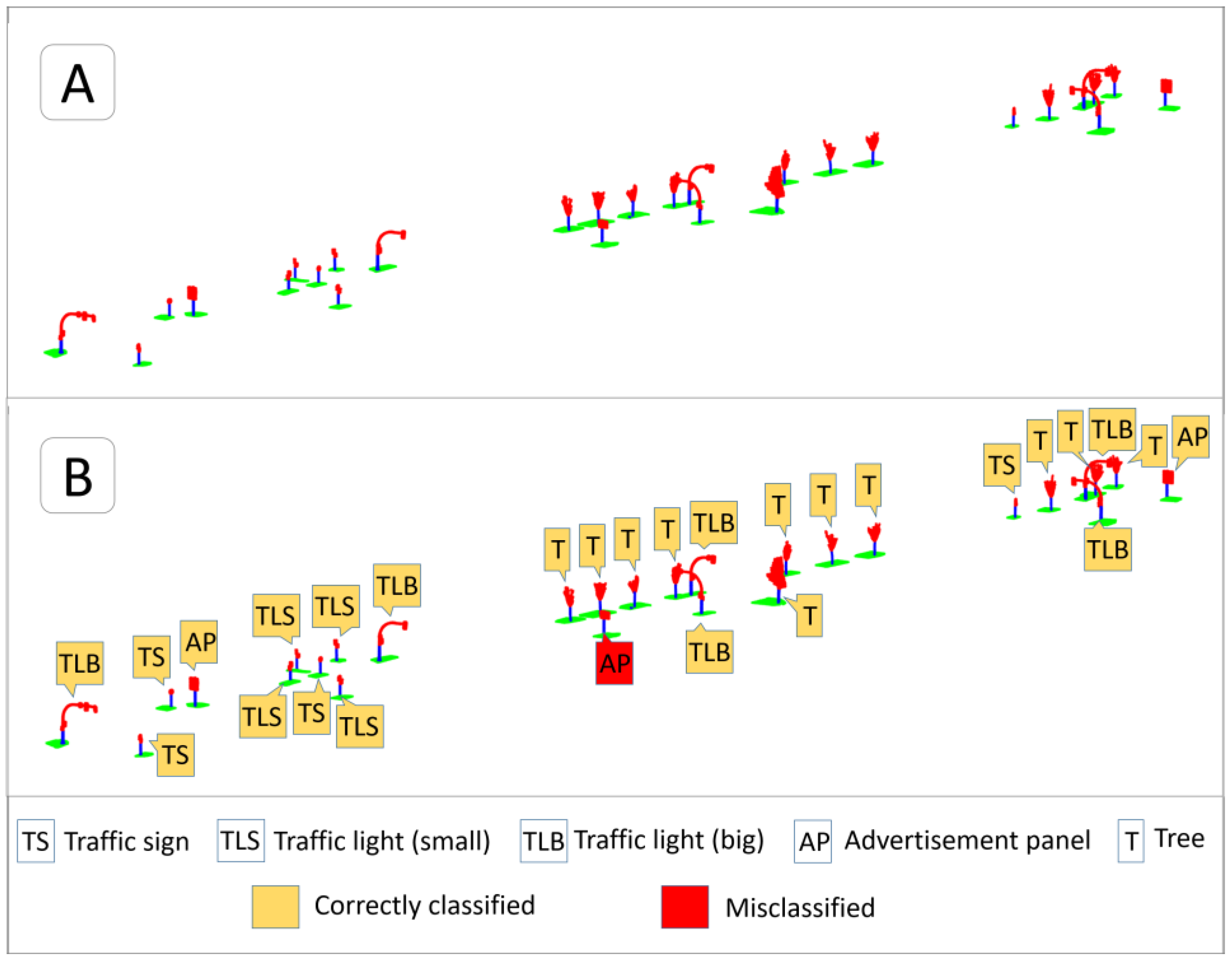
3. Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nebiker, S.; Bleisch, S.; Christen, M. Rich point clouds in virtual globes—A new paradigm in city modeling? Comput. Environ. Urban. Syst. 2010, 34, 508–517. [Google Scholar] [CrossRef]
- Puente, I.; González-Jorge, H.; Arias, P.; Armesto, J. Land-based Mobile Laser Scanning Systems: A review. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 38, 163–168. [Google Scholar] [CrossRef]
- Vosselman, G.; Gorte, B.G.; Sithole, G.; Rabbani, T. Recognising structure in laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 46, 33–38. [Google Scholar]
- Hadjiliadis, O.; Stamos, I. Sequential Classification in Point Clouds of Urban Scenes. In Proceedings of the 5th International Symposium 3D Data Processing, Visualization and Transmission, Paris, France, 17–20 May 2010. [Google Scholar]
- Aijazi, A.K.; Checchin, P.; Trassoudaine, L. Segmentation Based Classification of 3D Urban Point Clouds: A Super-Voxel Based Approach with Evaluation. Remote Sens. 2013, 5, 1624–1650. [Google Scholar] [CrossRef]
- Brenner, C. Extraction of Features from Mobile Laser Scanning Data for Future Driver Assistance Systems. In Advances in GIScience; Sester, M., Bernard, L., Paelke, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 25–42. [Google Scholar]
- Rutzinger, M.; Höfle, B.; Oude Elberink, S.; Vosselman, G. Feasibility of façade footprint extraction from Mobile Laser Scanning Data. Photogramm. Fernerkund. Geoinform. 2011, 97–107. [Google Scholar] [CrossRef]
- Jochem, A.; Hofle, B.; Rutzinger, M. Extraction of Vertical Walls from Mobile Laser Scanning Data for Solar Potential Assessment. Remote Sens. 2011, 3, 650–667. [Google Scholar] [CrossRef]
- El-Halawany, S.; Moussa, A.; Lichti, D.D.; El-Sheimy, N. Detection of road curb from mobile terrestrial laser scanner. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Science, Calgary, AB, Canada, 29–31 August 2011. [Google Scholar]
- Heo, J.; Jeonga, S.; Parka, H.; Junga, J.; Hanb, S.; Honga, S.; Sohna, H. Productive high-complexity 3D city modeling with point clouds collected from terrestrial LiDAR. Comput. Environ. Urban. Syst. 2013, 41, 26–38. [Google Scholar] [CrossRef]
- Boulaassal, H.; Landes, T.; Grussenmeyer, P.; Tarsha-Kurdi, F. Automatic segmentation of building facades using terrestrial laser data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 65–70. [Google Scholar]
- Buch, N.; Orwell, J.; Velastin, S.A. Detection and classification of vehicles for urban traffic scenes. In Proceedings of the Visual Information Engineering 5th International Conference, Xi’an China, 29 July–1 August 2008; pp. 182–187. [Google Scholar]
- Balali, V.; Golparvar-Fard, M. Segmentation and Recognition of Roadway Assets from Car-Mounted Video Streams using Scalable Non-Parametric Image Parsing. Elsevier J. Autom. Constr. 2015, 49, 27–39. [Google Scholar] [CrossRef]
- Tighe, J.; Niethammer, M.; Lazebnik, S. Scene parsing with object instances and occlusion ordering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2014, Columbus Convention Center Columbus, OH, USA, 23–28 June 2014; pp. 3748–3755. [Google Scholar]
- Balali, V.; Jahangiri, A.; Machiani, S.G. Multi-class US traffic signs 3D recognition and localization via image-based point cloud model using color candidate extraction and texture-based recognition. J. Adv. Eng. Inform. 2017, 32, 263–274. [Google Scholar] [CrossRef]
- Brostow, G.; Shotton, J.; Fauqueur, J.; Cipolla, R. Segmentation and recognition using structure from motion point clouds. Comput. Vis.–ECCV 2008, 44–57. [Google Scholar] [CrossRef]
- Gevaert, C.M.; Persello, C.; Sliuzas, R.; Vosselman, G. Informal settlement classification using point-cloud and image-based features from UAV data. ISPRS J. Photogramm. Remote Sens. 2017, 125, 225–236. [Google Scholar] [CrossRef]
- Golovinskiy, A.; Kim, V.G.; Funkhouser, T. Shape-based recognition of 3d point clouds in urban environments. In Proceedings of the IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 2154–2161. [Google Scholar]
- Lehtomäki, M.; Jaakkola, A.; Hyyppa, J.; Kukko, A.; Kaartinen, H. Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- El-Halawany, S.; Lichti, D. Detection of road poles from mobile terrestrial laser scanner point cloud. In Proceedings of the 2011 International Workshop on Multi-Platform/Multi-Sensor Remote Sensing and Mapping (M2RSM), Xiamen, China, 10–12 January 2011. [Google Scholar]
- Yokoyama, H.; Date, H.; Kanai, S.; Takeda, H. Pole-like objects recognition from Mobile Laser Scanning Data using smoothing and principal component analysis. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 115–120. [Google Scholar] [CrossRef]
- Pu, S.; Rutzinger, M.; Vosselmand, G.; Elberinkd, S.O. Recognizing basic structures from mobile laser scanning data for road inventory studies. ISPRS J. Photogramm. Remote Sens. 2011, 66, S28–S39. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A Voxel-Based Method for Automated Identification and Morphological Parameters Estimation of Individual Street Trees from Mobile Laser Scanning Data. Remote Sens. 2013, 5, 584–611. [Google Scholar] [CrossRef]
- Yu, Y.; Li, J.; Wen, C.; Guan, H.; Luo, H.; Wang, C. Bag-of-visual-phrases and hierarchical deep models for traffic sign detection and recognition in mobile laser scanning data. ISPRS J. Photogramm. Remote Sens. 2016, 113, 106–123. [Google Scholar] [CrossRef]
- Riveiro, B.; Díaz-Vilariño, L.; Conde-Carnero, B.; Soilán, M.; Arias, P. Automatic Segmentation and Shape-Based Classification of Retro-Reflective Traffic Signs from Mobile LiDAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 295–303. [Google Scholar] [CrossRef]
- Cabo, C.; Ordoñez, C.; García-Cortés, S.; Martínez, J. An algorithm for automatic detection of pole-like street furniture objects from Mobile Laser Scanner point clouds. ISPRS J. Photogramm. Remote Sens. 2014, 87, 47–56. [Google Scholar] [CrossRef]
- Fisher, R.A. The Use of Multiple Measurements in Taxonomic Problems. Ann. Eugen. 1936, 7, 179–188. [Google Scholar] [CrossRef]
- Rao, R.C. The utilization of multiple measurements in problems of biological classification. J. R. Stat. Soc. Ser. B 1948, 10, 159–203. [Google Scholar]
- McLachlan, G.J. Discriminant Analysis and Statistical Pattern Recognition; Wiley Interscience: Hoboken, NJ, USA, 2004. [Google Scholar]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995; p. 188. [Google Scholar]
- Lodha, S.; Kreps, E.; Helmbold, D.; Fitzpatrick, D. Aerial LiDAR Data Classification Using Support Vector Machines (SVM). In Proceedings of the Third International Symposium on 3D Processing, Visualization and Transmission, Chapel Hill, NC, USA, 14–16 June 2006; IEEE Xplore Digital Library: New York, NY, USA, 2006. [Google Scholar]
- Abe, S. Support. Vector Machines for Pattern Classification; Springer: London, UK, 2010; p. 471. [Google Scholar]
- Yang, B.; Dong, Z. A shape-based segmentation method for mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 81, 19–30. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LDA | SVM | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | EC | 1 | 2 | 3 | 4 | 5 | 6 | EC | ||
| 1 | 10 | 0 | 0 | 1 | 1 | 0 | 0.17 | 1 | 11 | 0 | 0 | 1 | 0 | 0 | 0.08 |
| 2 | 0 | 8 | 0 | 0 | 0 | 0 | 0.00 | 2 | 0 | 8 | 0 | 0 | 0 | 0 | 0.00 |
| 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0.00 | 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0.00 |
| 4 | 0 | 0 | 0 | 10 | 0 | 0 | 0.00 | 4 | 0 | 0 | 0 | 10 | 0 | 0 | 0.00 |
| 5 | 0 | 0 | 1 | 0 | 4 | 0 | 0.20 | 5 | 0 | 0 | 0 | 0 | 5 | 0 | 0.00 |
| 6 | 0 | 0 | 0 | 0 | 0 | 11 | 0.00 | 6 | 0 | 0 | 1 | 0 | 0 | 10 | 0.09 |
| EO | 0.00 | 0.00 | 0.25 | 0.09 | 0.20 | 0.00 | 0.06 | EO | 0.00 | 0.00 | 0.25 | 0.09 | 0.00 | 0.00 | 0.04 |
| ACC | 0.94 | ACC | 0.96 | ||||||||||||
| k | 0.93 | k | 0.95 | ||||||||||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ordóñez, C.; Cabo, C.; Sanz-Ablanedo, E. Automatic Detection and Classification of Pole-Like Objects for Urban Cartography Using Mobile Laser Scanning Data. Sensors 2017, 17, 1465. https://doi.org/10.3390/s17071465
Ordóñez C, Cabo C, Sanz-Ablanedo E. Automatic Detection and Classification of Pole-Like Objects for Urban Cartography Using Mobile Laser Scanning Data. Sensors. 2017; 17(7):1465. https://doi.org/10.3390/s17071465
Chicago/Turabian StyleOrdóñez, Celestino, Carlos Cabo, and Enoc Sanz-Ablanedo. 2017. "Automatic Detection and Classification of Pole-Like Objects for Urban Cartography Using Mobile Laser Scanning Data" Sensors 17, no. 7: 1465. https://doi.org/10.3390/s17071465