The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion

Abstract
:1. Introduction
2. The Navigational Data Fusion
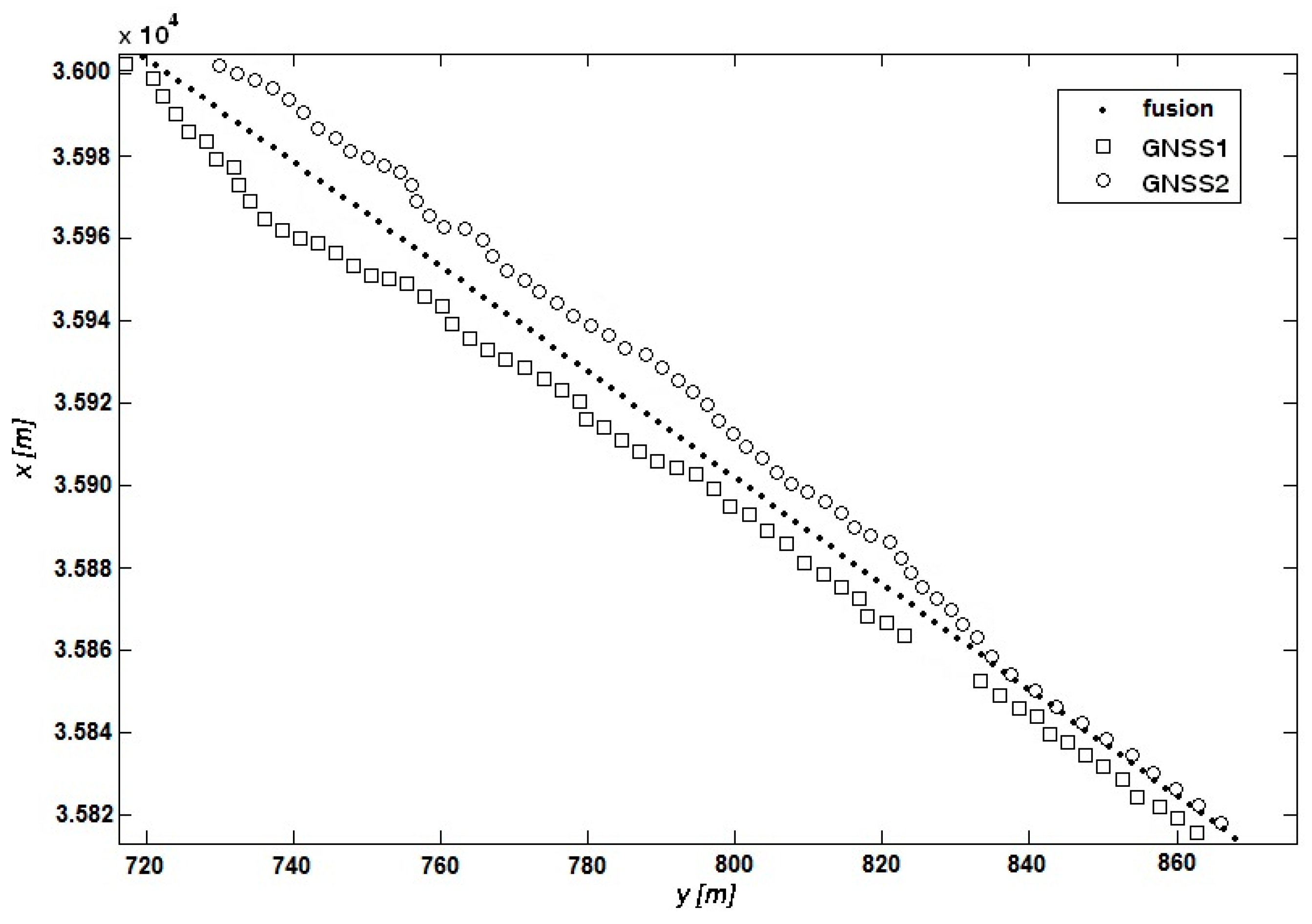
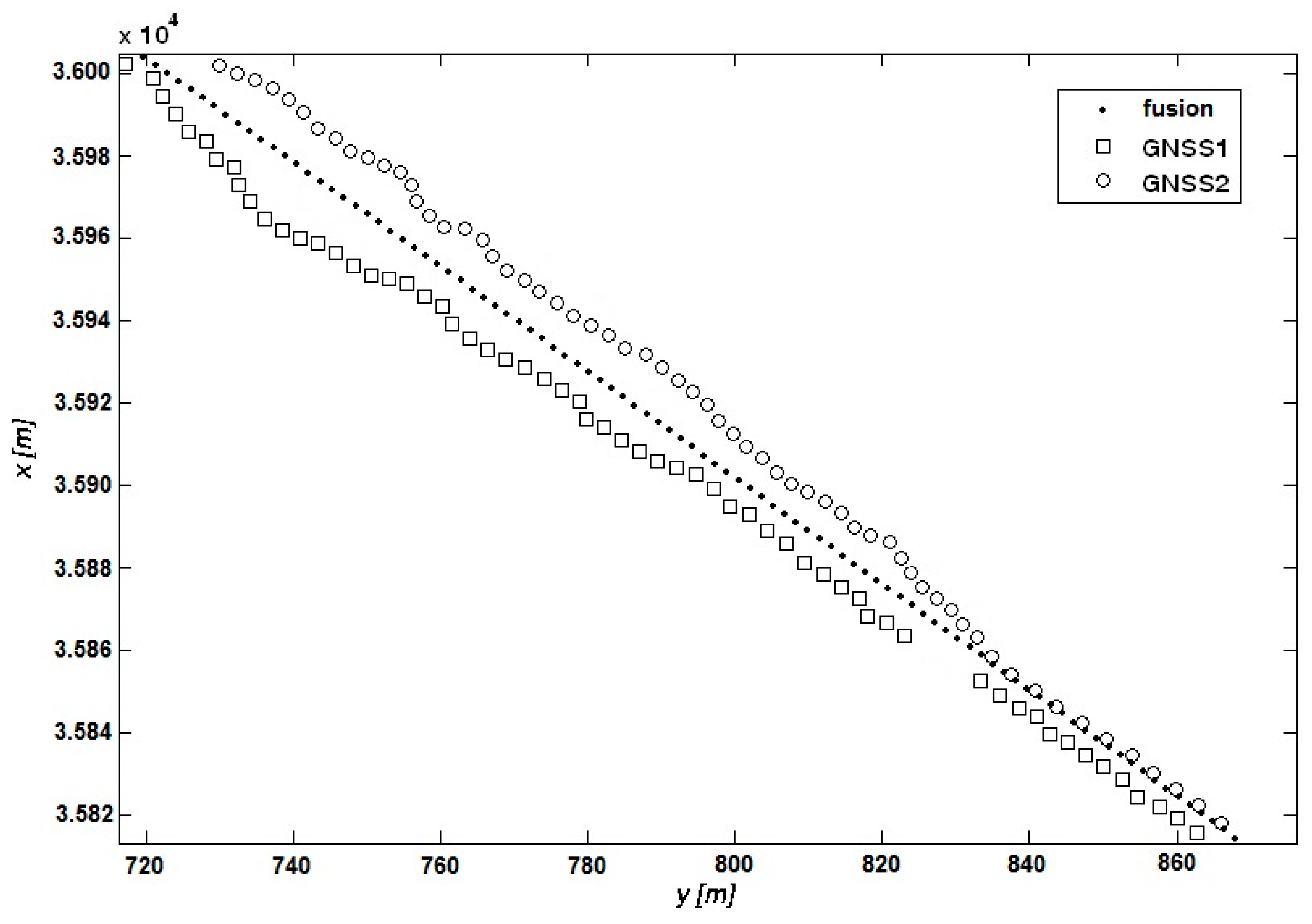
- fusion of Cartesian coordinates estimates of vessel position at an instant t;
- fusion of vessel speed estimates in the reference system at an instant t;
- fusion weights’ matrices;
- estimates of Cartesian coordinates of vessel position at an instant t determined using a Kalman filter for a measurement by the i-th sensor (); and
- estimates of vessel speed in the reference system at an instant t determined using a Kalman filter for a measurement by the i-th sensor ().
- matrix of cross-covariance of filtration errors between i-th and j-th sensor-specific subsystems.
- 4 × 4 unit matrix;
- constant matrices of the system: , .
3. Prediction of other Ship Trajectories
- m number of neural networks;
- i numeral of a network ();
- weight for the i-th network response;
- i-th network prediction error;
- minimum value of the prediction error made by a network; and
- maximum value of the prediction error made by a network.
- Recording of training data strings using the process of navigation data fusion (Equations (1)–(3)).
- Training of GRNN networks.
- Determination of the prediction errors of the networks on the basis of the current values of ship movement parameters using the navigational data fusion process (Equations (1)–(3)).
- Determination of the weights for each network response.
- Determination of the network response for the current values of the movement parameters using the navigational data fusion process (Equations (1)–(3)).
- Determination of the values of predicted movement parameters based on weighted responses of each network.
4. Prediction of One’s Own Ship Trajectory
- a matrix with the size and fixed elements independent of time;
- a matrix with the size and fixed elements independent of time;
- n-dimensional vector of state;
- n-dimensional vector of derivatives versus time (t); and
- p-dimensional vector of control signals.
- symmetric, positive semidefinite matrix, with dimensions and fixed elements being independent of time; and
- symmetric, positive definite matrix, with dimensions and fixed elements being independent of time.
- zero matrix with dimensions .
- deviation from the vessel’s course;
- rate of turn;
- rudder angle; and
- parameters determined from ship model tests, always assumed to be known for one’s own ship.
- a coefficient greater than zero, which is interpreted as a compromise between course deviation (yaw angle) and rudder angle (steering gear load);
- element of matrix P in the i-th row and j-th column;
- Cartesian coordinates (ship’s position);
- ship’s longitudinal speed; and
- transverse speed of the ship.
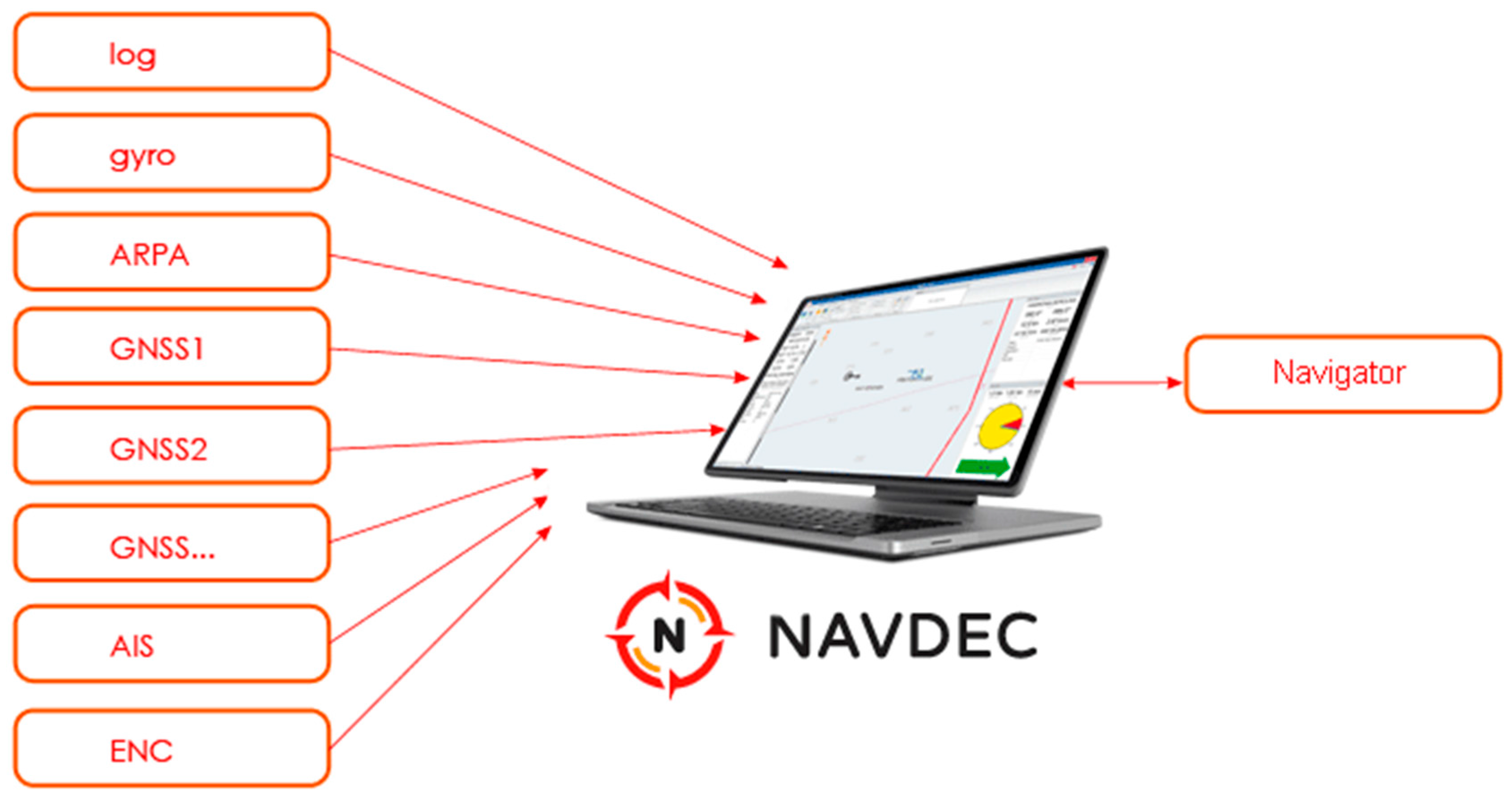
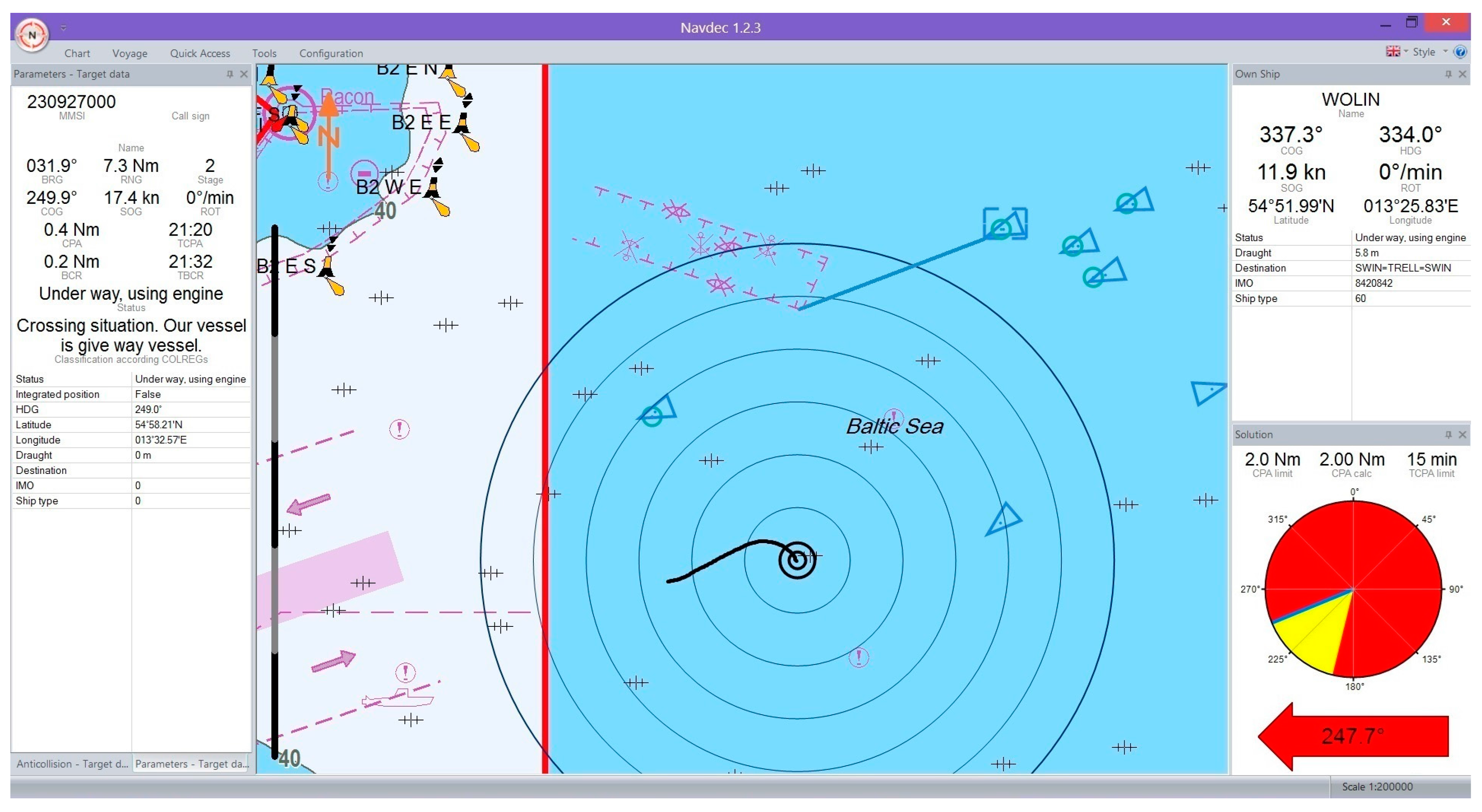
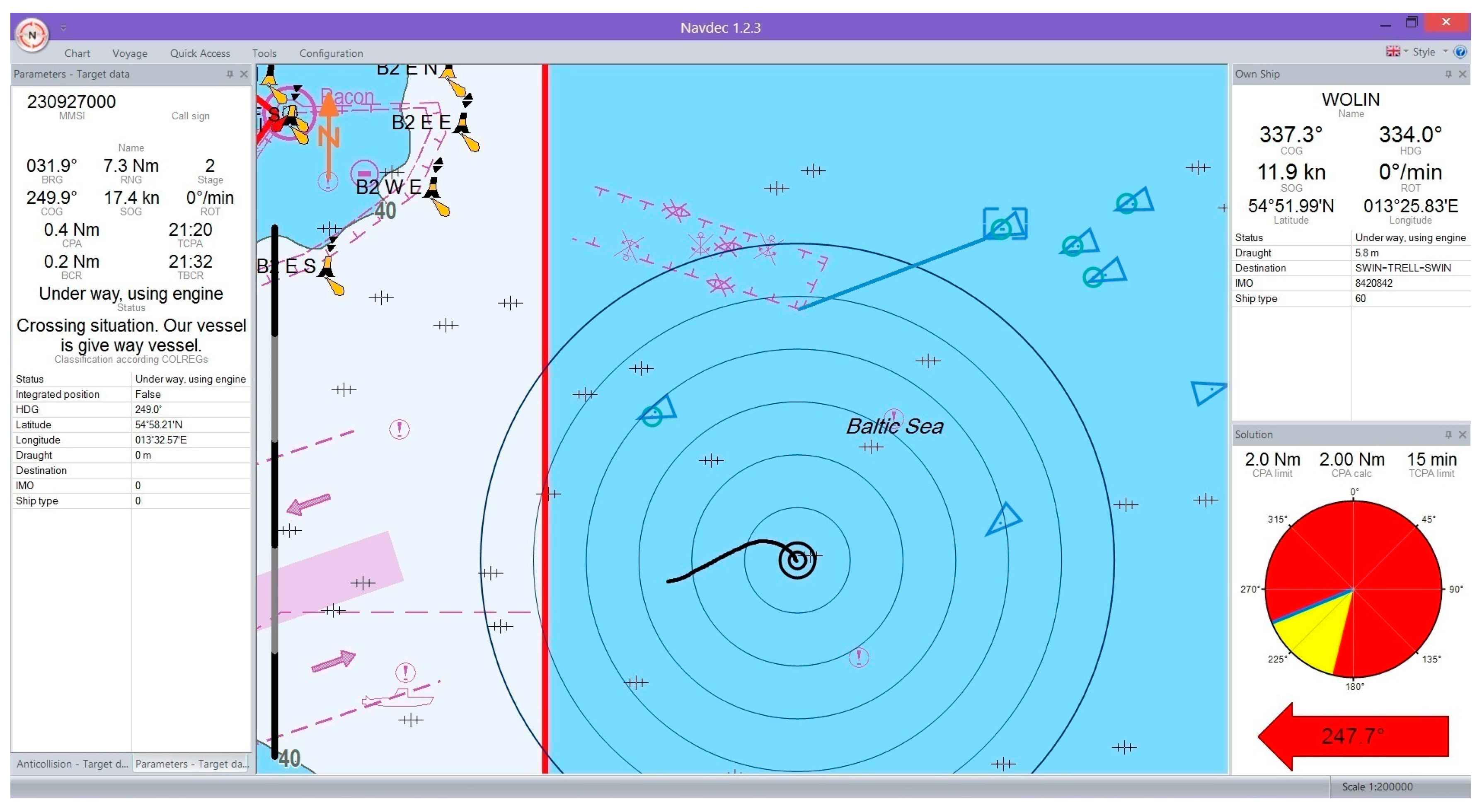
5. Implementation of the Proposed Algorithm in the Navigational Decision Support System NAVDEC
- the use of the navigational data fusion process increases the accuracy of prediction,
- prediction for one’s own ship is more accurate than the prediction for a target.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bancroft, J.B.; Lachapelle, G. Data fusion algorithms for multiple inertial measurement units. Sensors 2011, 11, 6771–6798. [Google Scholar] [CrossRef] [PubMed]
- Kazimierski, W. Proposal of neural approach to maritime radar and automatic identification system tracks association. IET Radar Sonar Navig. 2017, 11, 729–735. [Google Scholar] [CrossRef]
- Kazimierski, W.; Stateczny, A. Radar and automatic identification system track fusion in an electronic chart display and information system. J. Navig. 2015, 68, 1141–1154. [Google Scholar] [CrossRef]
- Majumder, S.; Scheding, S.; Durrant-Whyte, H.F. Multisensor data fusion for underwater navigation. Robot. Auton. Syst. 2001, 35, 97–108. [Google Scholar] [CrossRef]
- Stateczny, A.; Bodus-Olkowska, I. Hierarchical hydrographic data fusion for precise port electronic navigational chart production. In Proceedings of the 14th Transport Systems Telematics Conference, Cracow, Poland, 22–25 October 2014; pp. 359–368. [Google Scholar]
- Vespe, M.; Sciotti, M.; Burro, F.; Battistello, G.; Sorge, S. Maritime multi-sensor data association based on geographic and navigational knowledge. In Proceedings of the IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1453–1458. [Google Scholar]
- Zaniewicz, G.; Kazimierski, W.; Bodus-Olkowska, I. Integration of spatial data from external sensors in the mobile navigation system for inland shipping. In Proceedings of the Baltic Geodetic Congress, Gdańsk, Poland, 2–4 June 2016; pp. 165–170. [Google Scholar]
- Łącki, M. Intelligent prediction of ship maneuvering. Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 511–516. [Google Scholar] [CrossRef]
- Perera, L.P.; Oliveira, P.; Soares, C.G. Maritime traffic monitoring based on vessel detection, tracking, state estimation, and trajectory prediction. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1188–1200. [Google Scholar] [CrossRef]
- Pietrzykowski, Z.; Reich, C.H. Prediction of ship movement in a restricted area using artificial neural networks. In Proceedings of the 7th International Conference Advanced Computer Systems, Szczecin, Poland, 19–21 October 2000; pp. 286–293. [Google Scholar]
- Xu, T.; Liu, X.; Yang, X. Ship Trajectory online prediction based on BP neural network algorithm. In Proceedings of the International Conference of Information Technology, Computer Engineering and Management Sciences, Nanjing, China, 24–25 September 2011; pp. 103–106. [Google Scholar]
- Breda, L. Capability prediction: An effective way to improve navigational performance. J. Navig. 2000, 53, 343–354. [Google Scholar] [CrossRef]
- Sutulo, S.; Moreira, L.; Soares, C.G. Mathematical models for ship path prediction in manoeuvring simulation systems. Ocean Eng. 2002, 29, 1–19. [Google Scholar] [CrossRef]
- Perera, L.P.; Soares, C.G. Ocean vessel trajectory estimation and prediction based on extended kalman filter. In Proceedings of the Second International Conference on Adaptive and Self-Adaptive Systems and Applications, Lisbon, Portugal, 21–26 November 2010; pp. 14–20. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: New York, NY, USA, 1994. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Khan, A.; Bil, C.; Marion, K.E. Ship motion prediction for launch and recovery of air vehicles. In Proceedings of the OCEANS Conference, Washington, DC, USA, 19–23 September 2005; pp. 2795–2801. [Google Scholar]
- Mao, S.; Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G. An Automatic Identification System (AIS) database for maritime trajectory prediction and data mining. arXiv, 2016; arXiv:1607.03306. [Google Scholar]
- Simsir, U.; Amasyali, M.F.; Bal, M.; Celebi, U.B.; Ertugrul, S. Decision support system for collision avoidance of vessels. Appl. Soft Comput. 2014, 25, 369–378. [Google Scholar] [CrossRef]
- Simsir, U.; Ertugrul, S. Prediction of manually controlled vessels position and course navigating in narrow waterways using artificial neural networks. Appl. Soft Comput. 2009, 9, 1217–1224. [Google Scholar] [CrossRef]
- Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G. Exploiting AIS data for intelligent maritime navigation: A comprehensive survey. arXiv, 2016; arXiv:1606.00981. [Google Scholar]
- Pershitz, R. Ships Maneuverability and Control; Sudostroenie: Leningrad, Russia, 1973. [Google Scholar]
- Semerdjiev, E.; Mihaylova, L. Adaptive interacting multiple model algorithm for manoeuvring ship tracking. In Proceedings of the International Conference on Information Fusion, Las Vegas, NV, USA, 6–9 July 1998; pp. 974–979. [Google Scholar]
- Semerdjiev, E.; Mihaylova, L. Variable- and fixed-structure augmented interacting multiple model algorithms for manoeuvring ship tracking based on new ship models. Int. J. Appl. Math. Comput. Sci. 2000, 10, 591–604. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I. Dynamic models. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Borkowski, P. Algorithm of multi-sensor navigational data fusion—Testing of estimation quality. Pol. J. Environ. Stud. 2008, 17, 43–47. [Google Scholar]
- Borkowski, P. Data fusion in a navigational decision support system on a sea-going vessel. Pol. Marit. Res. 2012, 19, 78–85. [Google Scholar]
- Sun, S.; Deng, Z. Multi-sensor optimal information fusion Kalman filter. Automatica 2004, 40, 1017–1023. [Google Scholar] [CrossRef]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef] [PubMed]
- Pietrzykowski, Z.; Borkowski, P.; Wołejsza, P. Marine integrated navigational decision support system. In Proceedings of the 12th Transport Systems Telematics Conference, Katowice, Poland, 10–13 October 2012; pp. 284–292. [Google Scholar]
- Pietrzykowski, Z.; Wołejsza, P.; Borkowski, P. Decision support in collision situations at sea. J. Navig. 2017, 70, 447–464. [Google Scholar] [CrossRef]
- NAVDEC. Available online: http://www.navdec.com (accessed on 29 March 2017).
- Unity Line. Available online: http://www.unityline.pl (accessed on 29 March 2017).
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System; Springer: Vienna, Austria, 2001. [Google Scholar]
- Transas ECDIS. Available online: http://www.transas.com/products/navigation/ecdis/ECDIS (accessed on 2 June 2017).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Method of Prediction | Own/Other Ship | RMSE [m] |
|---|---|---|
| Transas ECDIS | not applicable | 173 |
| proposed algorithm | other | 85 |
| own | 21 | |
| proposed algorithm with the data fusion process | other | 78 |
| own | 19 |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borkowski, P. The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion. Sensors 2017, 17, 1432. https://doi.org/10.3390/s17061432
Borkowski P. The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion. Sensors. 2017; 17(6):1432. https://doi.org/10.3390/s17061432
Chicago/Turabian StyleBorkowski, Piotr. 2017. "The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion" Sensors 17, no. 6: 1432. https://doi.org/10.3390/s17061432
APA StyleBorkowski, P. (2017). The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion. Sensors, 17(6), 1432. https://doi.org/10.3390/s17061432