Multilook SAR Image Segmentation with an Unknown Number of Clusters Using a Gamma Mixture Model and Hierarchical Clustering

Abstract
:1. Introduction
2. Description of the Proposed Algorithm
2.1. Segmentation Process
- Calculating the prior probability πij(t) by Equation (5);
- Calculating the scale parameter βj(t) by Equation (13), and calculating conditional probability by Equation (1);
- Calculating the posterior probability p(zij = 1|xi; θj)(t) by Equation (7);
- Repeating Step 1–3 until t is equal to T;
- The optimal segmentation result zij(T) under fixed number of clusters m is obtained by Equation (8).
2.2. Hierarchical Clustering Process
2.3. General Procedure of the Proposed Algorithm
- Initialization. The iterative indicator of inner loop t = 0 and outer loop τ = 0, the maximum number of inner loop T = 20 according to the experimental experience, shape parameter α which is equal to the looks of the SAR images, intensity of neighbor influence η within the range of 0~1;
- Coarse segmentation. The initial segmentation zij(0, 0) is obtained by Equation (18), and the initial scale parameter βj(0, 0) is calculated by Equation (19).
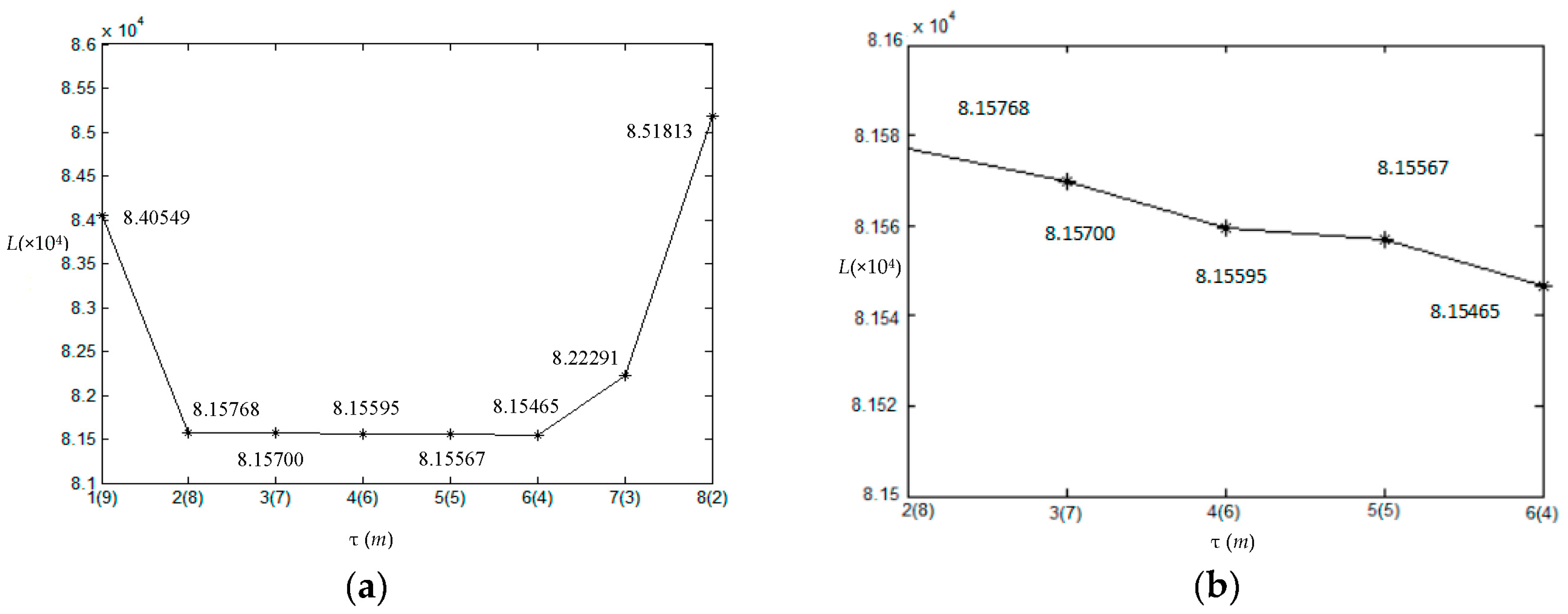
- Inner loop. Calculating the prior probability πij(τ, t) by Equation (5), calculating the posterior probability p(zij = 1|xi; θj)(τ, t) by Equation (7). In the inner iteration, the scale parameter βj(τ, t) is calculated by Equation (13), after T inner iterations, the segmentation zij(τ, T) under the current outer loop is obtained and L(τ) is recorded by Equation (9);
- Merging clusters. Choosing clusters j and j’ by Equation (14) which correspond to the minimum global energy function. Merging clusters j and j’, and updating the parameters of πij(τ, *), βj(τ, *) by Equations (5) and (13), respectively;
- Updating parameters. After merging, let m(τ+1) = m(τ) − 1, and βj(τ+1, 0) is obtained by Equation (15), then the segmentation zij(τ+1, T) and global energy L(τ+1) are obtained by inner loop;
- Repeat Step 4–5, and stop the outer loop when m(τ) = 1;
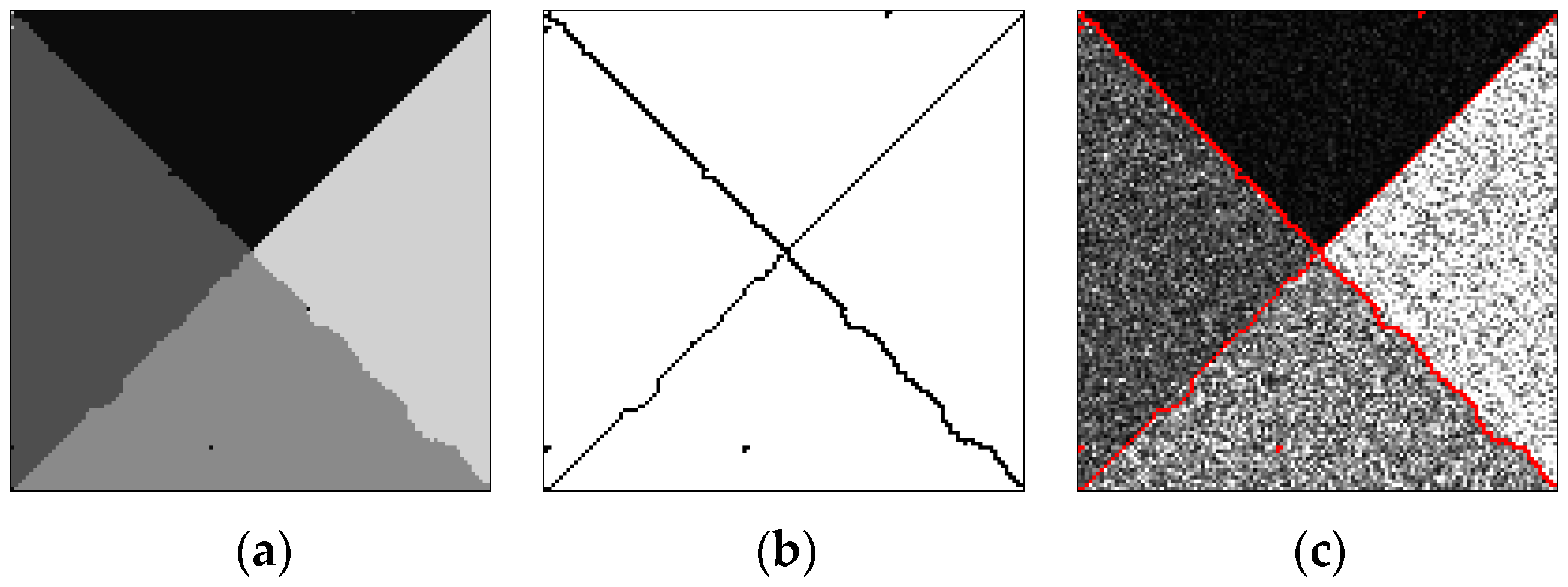
- The real number of clusters and final optimal segmentation result is found by Equations (16) and (17).
3. Experimental Results and Discussion
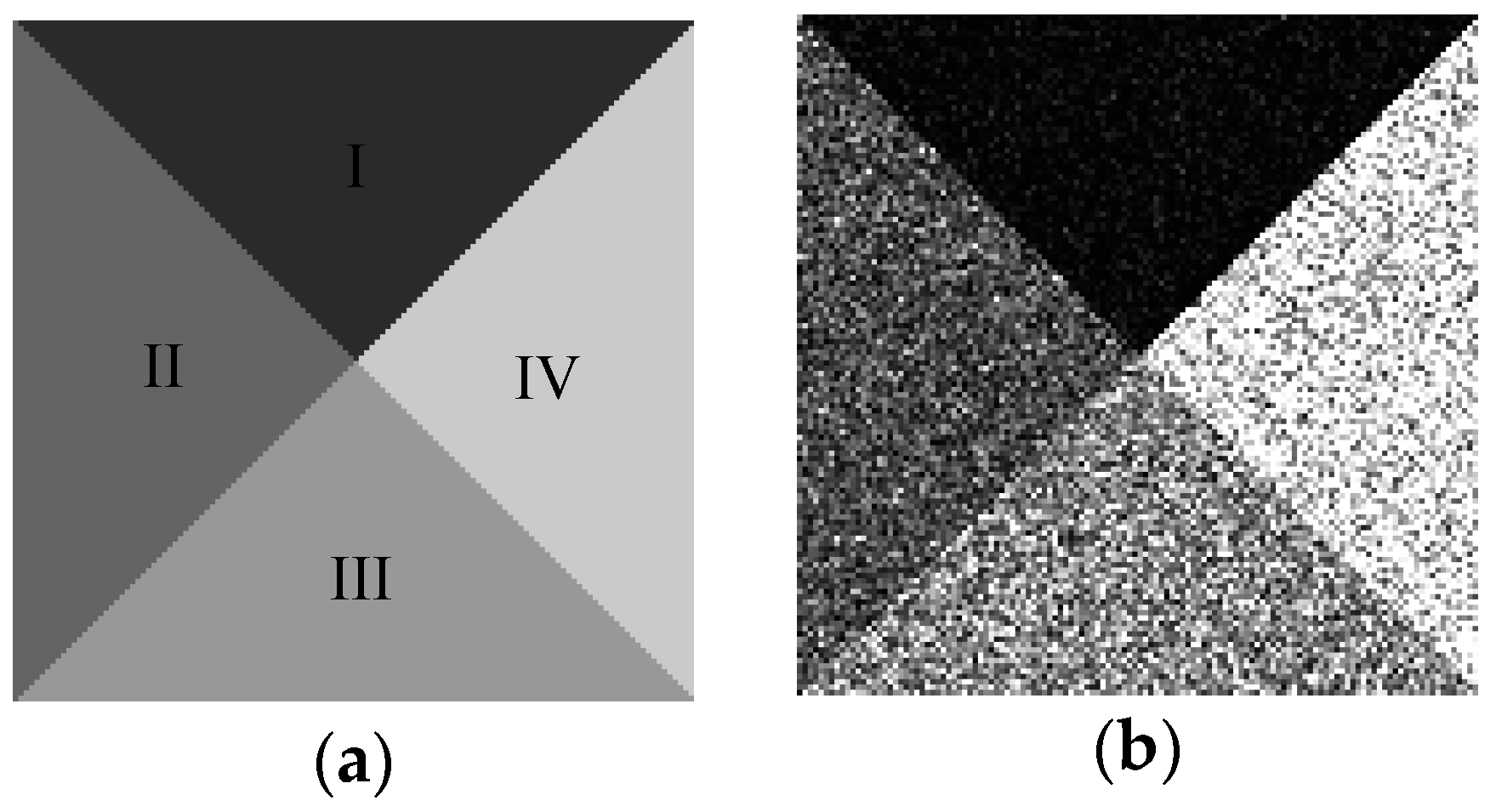
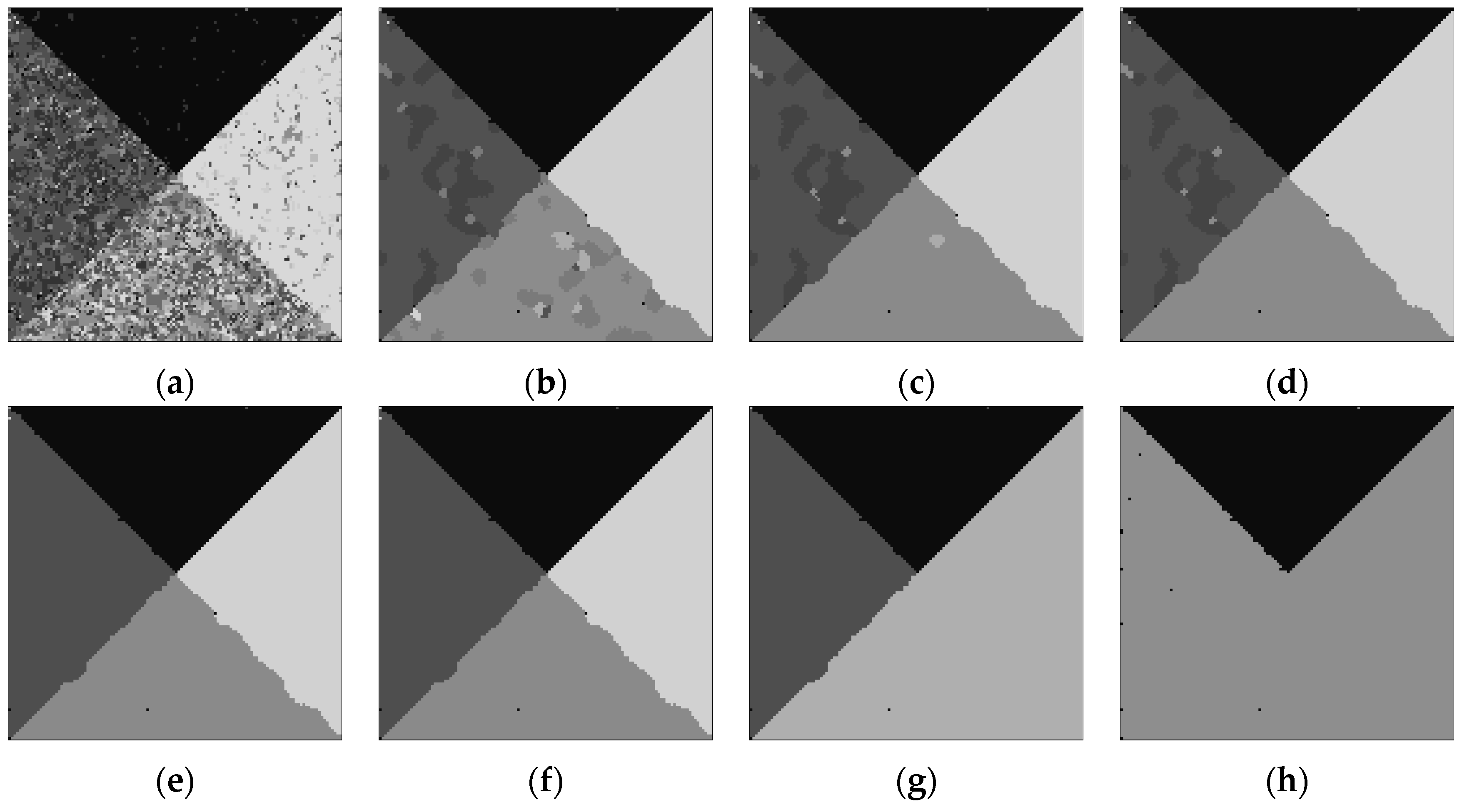
3.1 Simulated SAR Image Segmentation
3.2. Real SAR Images Segmentation
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bombrun, L.; Vasile, G.; Gay, M.; Totir, F. Hierarchical segmentation of polarimetric SAR images using heterogeneous clutter models. IEEE Trans. Geosci. Remote Sens. 2011, 49, 726–737. [Google Scholar] [CrossRef]
- Lee, J.S.; Schuler, R.H.; Lang, K.J. K-distribution for multi-look processed polarimetric SAR imagery. Proceedings of 1994 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 1994), Pasadena, CA, USA, 8–12 August 1994; pp. 2179–2181. [Google Scholar]
- Shang, R.H.; Tian, P.P.; Jiao, L.C.; Stolkin, R.; Feng, J.; Hou, B.; Zhang, X.G. A spatial fuzzy clustering algorithm with kernel metric based on immune clone for SAR image segmentation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1640–1652. [Google Scholar] [CrossRef]
- Zhao, Q.H.; Li, Y.; Wang, Y. SAR image segmentation with unknown number of classes combined Voronoi tessellation and RJMCMC algorithm. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; pp. 119–124. [Google Scholar]
- Fergani, B.; Kholladi, M.K.; Bahri, M. Comparison of FCM and FISODATA. Int. J. Comput. Appl. 2012, 56, 35–39. [Google Scholar] [CrossRef]
- Chatzis, S.P.; Varvarigou, T.A. A fuzzy clustering approach toward hidden Markov random field models for enhanced spatially constrained image segmentation. IEEE Trans. Fuzzy Syst. 2008, 16, 1351–1361. [Google Scholar] [CrossRef]
- Sharma, A.; Boroevich, K.A.; Shigemizu, D.; Kamatani, Y.; Kubo, M.; Tsunoda, T. Hierarchical maximum likelihood clustering approach. IEEE Trans. Biomed. Eng. 2017, 64, 112–122. [Google Scholar] [CrossRef] [PubMed]
- Leonard, K.; Peter, J.R. Agglomerative Nesting (Program AGNES). In Finding Groups in Data: An Introduction to Cluster Analysis; John Wiley & Sons: Brussels, Belgium, 2005; Volume 5, pp. 199–252. [Google Scholar]
- Legendre, P.; Legendre, L. Cluster analysis. In Numerical Ecology, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 1998; Volume 8, pp. 303–381. [Google Scholar]
- Lopes, A.; Laur, H.; Nezry, E. Statistical distribution and texture multilook and complex SAR images. In Proceedings of the 10th Annual International Symposium on Geoscience and Remote Sensing (IGARSS 1990), Baltimore, MD, USA, 20–24 May 1990; pp. 2427–2430. [Google Scholar]
- Tison, C.; Nicolas, J.M.; Tupin, F.; Maître, H. A new statistical model for Markovian classification of urban areas in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2046–2057. [Google Scholar] [CrossRef]
- Green, P.J. Reversible jump Markov chain Monte Carlo computation and Bayesian model determination. Biometrika 1995, 82, 711–732. [Google Scholar] [CrossRef]
- Kato, Z. Segmentation of color images via reversible jump MCMC sampling. Image Vision Comput. 2008, 26, 361–371. [Google Scholar] [CrossRef]
- Lee, S.; Crawford, M.M. Unsupervised multistage image classification using hierarchical clustering with a Bayesian similarity measure. IEEE Trans. Image Process. 2005, 14, 312–320. [Google Scholar] [PubMed]
- Mignotte, M.; Collet, C.; Perez, P.; Bouthemy, P. Sonar image segmentation using an unsupervised hierarchical MRF model. IEEE Trans. Image Process. 2000, 9, 1216–1231. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.J.; Jiao, S.H.; Shen, L.Y.; Sun, J.Y.; Tang, L. Unsupervised SAR image segmentation based on a hierarchical TMF model in the discrete wavelet domain for sea area detection. Discret. Dyn. Nat. Soc. 2014, 2014, 1–9. [Google Scholar] [CrossRef]
- Peng, Y.J.; Chen, J.Y.; Xu, X.; Pu, F.L. SAR Images statistical modeling and classification based on the mixture of Alpha-Stable distributions. Remote Sens. 2013, 5, 2145–2163. [Google Scholar] [CrossRef]
- Garcia, V.; Nielsen, F.; Nock, R. Hierarchical Gaussian mixture model. In Proceedings of the 2010 IEEE International Conference on Acoustics Speech, and Signal Processing (ICASSP 2010), Dallas, TX, USA, 14–19 March 2010; pp. 4070–4073. [Google Scholar]
- AlSaeed, D.H.; Bouridane, A.; ElZaart, A.; Sammouda, R. Two modified Otsu image segmentation methods based on Lognormal and Gamma distribution models. In Proceedings of the 2012 International Conference on Information Technology and e-Services, Sousse, Tunisia, 24–26 March 2012; pp. 1–5. [Google Scholar]
- Oliver, C.J.; Quegan, S. Understanding Synthetic Aperture Radar Images; SciTech Publishing Incorporated: Raleigh, NC, USA, 2004. [Google Scholar]
- Dong, Y.; Forester, B.; Milne, A. Evaluation of radar image segmentation by Markov random field model with Gaussian distribution and Gamma distribution. In Proceedings of the 1998 IEEE International Geoscience and Remote Sensing, Seattle, WA, USA, 6–10 July 1998; pp. 1617–1619. [Google Scholar]
- Nikou, C.; Likas, A.C.; Galatsanos, N.P. A Bayesian framework for image segmentation with spatially varying mixtures. IEEE Trans. Image Process. 2010, 19, 2278–2289. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Homogeneous Region | |||
|---|---|---|---|---|
| I | II | III | IV | |
| α | 4 | 4 | 4 | 4 |
| β | 5 | 20 | 35 | 65 |
| Algorithm | Main Parameter | Value | Time (s) | Accuracy | Homogeneous Region | |||
|---|---|---|---|---|---|---|---|---|
| I | II | III | IV | |||||
| The proposed | span parameter d | 30 | 1139.19 | user’s | 99.76 | 99.42 | 99.50 | 98.67 |
| producer’s | 100 | 99.57 | 98.14 | 99.70 | ||||
| neighborhood coefficient η | 0.8 | overall | 99.34 | |||||
| Kappa | 0.99 | |||||||
| ISODATA | expected number of clusters | 4 | 5.08 | user’s | 69.29 | 52.83 | 50.67 | 77.41 |
| minimum number of pixel | 2500 | producer’s | 99.61 | 54.01 | 36.16 | 63.74 | ||
| upper bounds of standar d deviation | 10 | overall | 63.34 | |||||
| lower limit of distance | 10 | Kappa | 0.51 | |||||
| AGENES | span parameter d | 30 | 30.77 | user’s | 67.86 | 53.19 | 49.62 | 79.08 |
| producer’s | 99.93 | 50.46 | 40.28 | 60.64 | ||||
| overall | 62.74 | |||||||
| Kappa | 0.50 | |||||||
| HMRF FCM | fuzzy coefficient | 0.5 | 32.4449 | user’s | 98.31 | 80.32 | 95.16 | 82.16 |
| producer’s | 99.19 | 96.03 | 60.99 | 94.79 | ||||
| neighborhood coefficient | 1 | overall | 87.76 | |||||
| Kappa | 0.84 | |||||||
| Gamma MRF | neighborhood coefficient | 0.2 | 5902.28 | user’s | 96.98 | 93.02 | 92.01 | 92.06 |
| producer’s | 98.75 | 90.96 | 88.45 | 96.06 | ||||
| shape parameter | 4 | overall | 93.54 | |||||
| Kappa | 0.91 | |||||||
| Parameters | Homogeneous Region | ||||
|---|---|---|---|---|---|
| I | II | III | IV | ||
| mean | actual/estimated | 19.90/19.87 | 79.24/79.39 | 137.07/137.02 | 208.95/208.45 |
| deviation rate | −0.0015 | 0.0019 | −0.0004 | −0.0024 | |
| variance | actual/estimated | 9.962/9.892 | 39.092/39.072 | 61.402/61.162 | 57.532/57.922 |
| deviation rate | −0.0140 | −0.0010 | −0.0078 | 0.0136 | |
| d | η | Approximate Time (s) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Number of Clusters/Overall Accuracy | |||||||||||
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | ||
| 10 | 3 | 3 | 4/94.73 | 4/97.06 | 4/97.33 | 4/97.45 | 4/97.39 | 4/97.99 | 4/97.56 | 6 | 21,600 |
| 20 | 3 | 3 | 4/93.61 | 4/96.05 | 4/96.60 | 4/97.66 | 4/98.18 | 5 | 5 | 6 | 3000 |
| 30 | 3 | 3 | 4/94.62 | 4/97.59 | 4/98.29 | 4/99.04 | 4/98.84 | 4/99.34 | 6 | 6 | 1000 |
| 40 | 3 | 3 | 4/93.38 | 4/93.71 | 4/97.78 | 4/98.31 | 4/98.72 | 4/98.60 | 6 | 6 | 800 |
| 50 | 3 | 3 | 4/93.21 | 4/96.63 | 4/97.52 | 4/97.92 | 4/98.00 | 5 | 5 | 5 | 500 |
| Parameters | T | ||||
|---|---|---|---|---|---|
| 1 | 5 | 20 | 30 | 50 | |
| number of clusters/accuracy | 6 | 4/99.15 | 4/99.34 | 4/99.34 | 4/99.34 |
| time (s) | 305.687 | 435.110 | 1139.19 | 1150.107 | 1266.915 |
| Algorithm | Main Parameter | Image 1 | Image 2 | Image 3 | Image 4 | ||||
|---|---|---|---|---|---|---|---|---|---|
| Value | Time (s) | Value | Time (s) | Value | Time (s) | Value | Time (s) | ||
| The proposed | span parameter d | 30 | 1387.64 | 30 | 1450.60 | 20 | 2099.92 | 30 | 1192.03 |
| neighborhood coefficient η | 0.5 | 0.4 | 0.7 | 0.5 | |||||
| inner loop T | 20 | 20 | 20 | 20 | |||||
| shape parameter | 4 | 4 | 4 | 4 | |||||
| ISODATA | expected number of clusters | 2 | 2.96 | 3 | 4.01 | 3 | 3.37 | 4 | 5.42 |
| minimum number of pixel | 5000 | 3000 | 3000 | 1000 | |||||
| upper bounds of standard deviation | 10 | 20 | 10 | 10 | |||||
| lower limit of distance | 10 | 20 | 10 | 10 | |||||
| AGENES | span parameter d | 30 | 3.48 | 30 | 5.12 | 30 | 9.17 | 30 | 5.02 |
| HMRF FCM | fuzzy coefficient | 0.5 | 2.84 | 0.1 | 5.8286 | 0.5 | 6.17 | 0.5 | 8.60 |
| neighborhood coefficient | 0.7 | 4 | 0.75 | 0.95 | |||||
| Gamma MRF | neighborhood coefficient | 0.2 | 4226.35 | 0.2 | 10,593.52 | 0.4 | 10,367.17 | 0.34 | 9378.35 |
| shape parameter | 4 | 4 | 4 | 4 | |||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Q.; Li, X.; Li, Y. Multilook SAR Image Segmentation with an Unknown Number of Clusters Using a Gamma Mixture Model and Hierarchical Clustering. Sensors 2017, 17, 1114. https://doi.org/10.3390/s17051114
Zhao Q, Li X, Li Y. Multilook SAR Image Segmentation with an Unknown Number of Clusters Using a Gamma Mixture Model and Hierarchical Clustering. Sensors. 2017; 17(5):1114. https://doi.org/10.3390/s17051114
Chicago/Turabian StyleZhao, Quanhua, Xiaoli Li, and Yu Li. 2017. "Multilook SAR Image Segmentation with an Unknown Number of Clusters Using a Gamma Mixture Model and Hierarchical Clustering" Sensors 17, no. 5: 1114. https://doi.org/10.3390/s17051114