
Theoretical Study of Monolayer and Double-Layer Waveguide Love Wave Sensors for Achieving High Sensitivity

Abstract
:1. Introduction
2. Theoretical Analysis
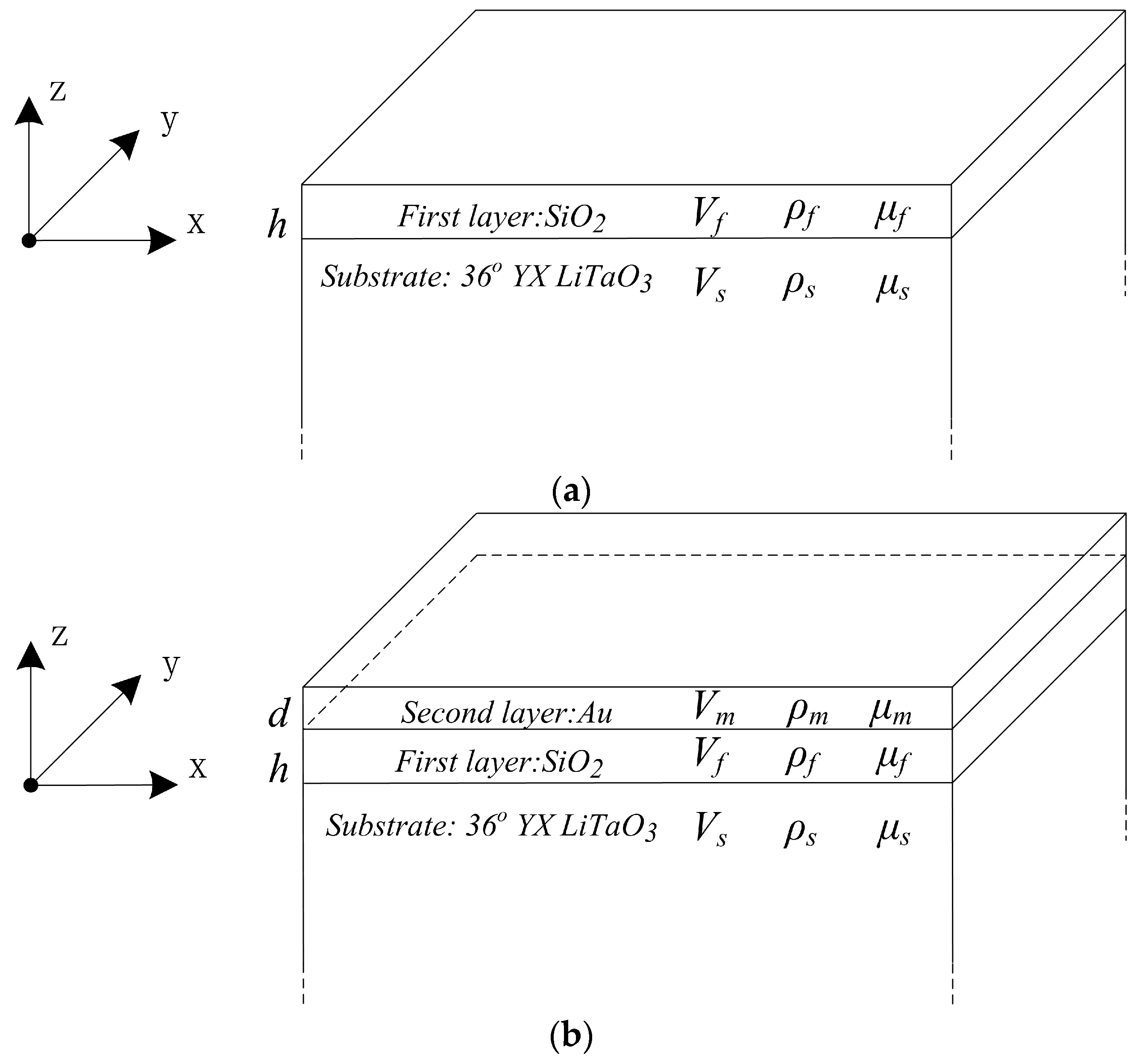
2.1. Love Wave Propagation Equation
2.2. Boundary Condition
2.3. Dispersion Equation
2.4. Particle Displacement and Wave Energy
2.5. Sensitivity of the Love Wave Sensor
3. Results and Discussion
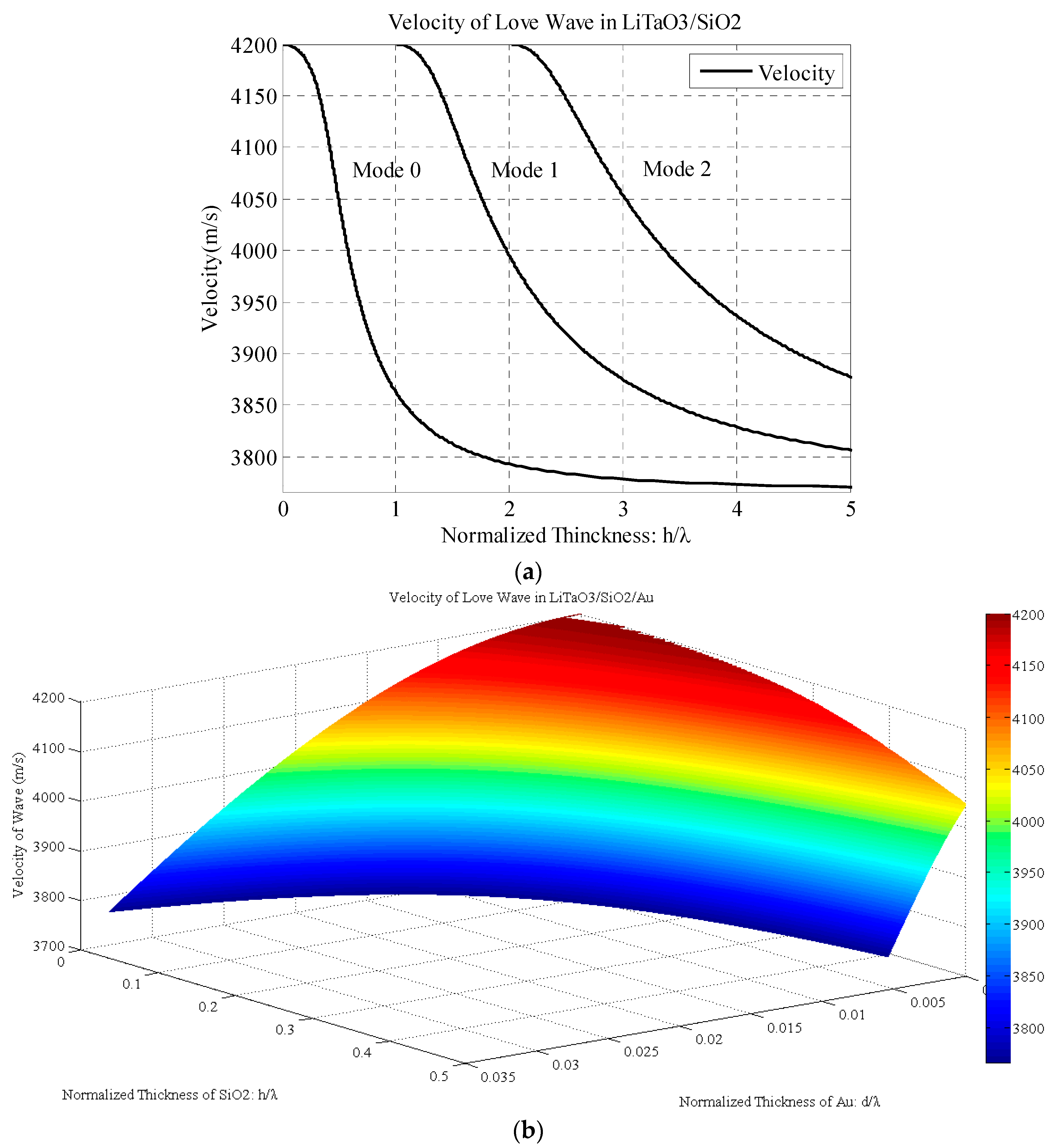
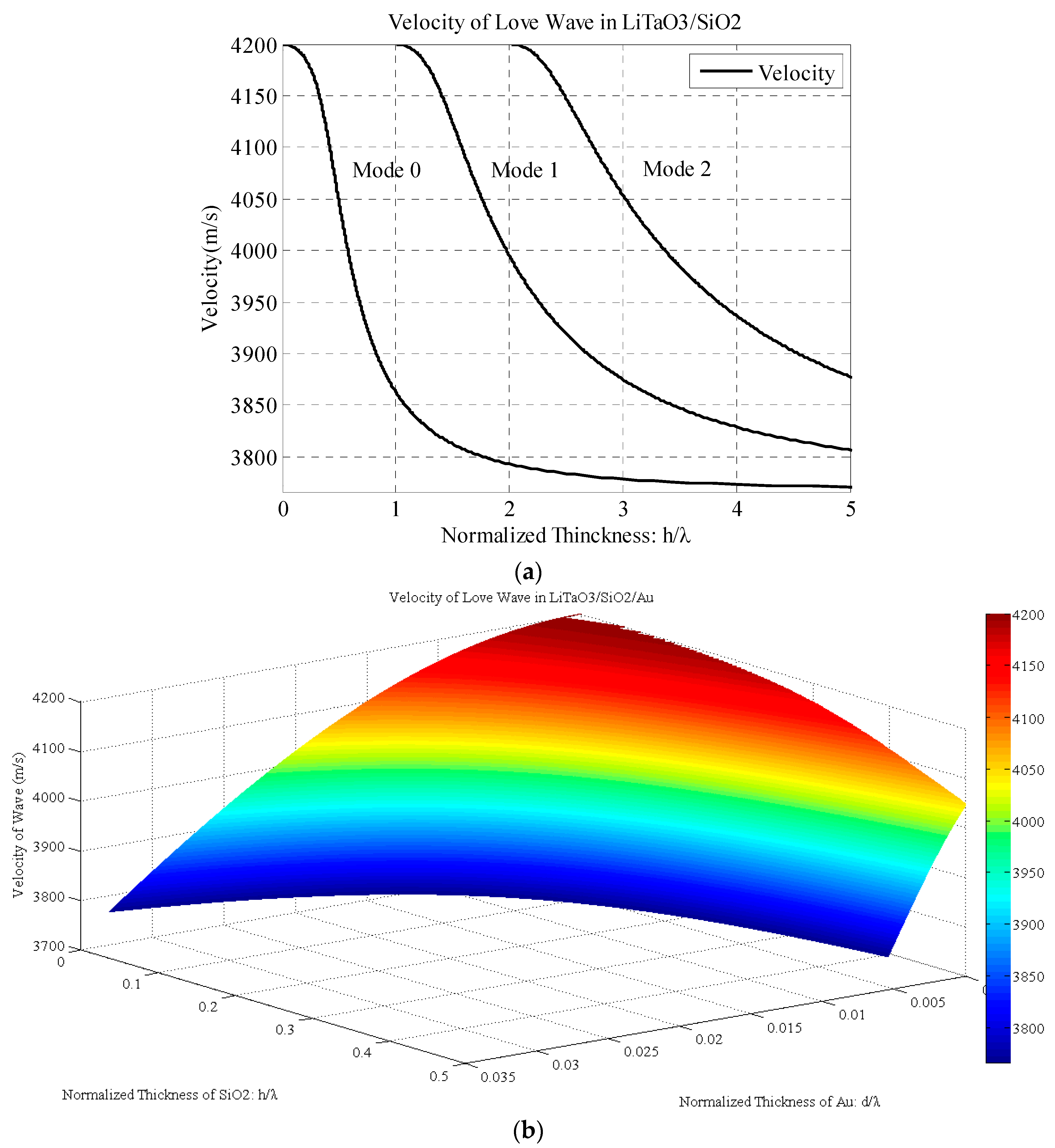
3.1. Results of Love Wave Velocity
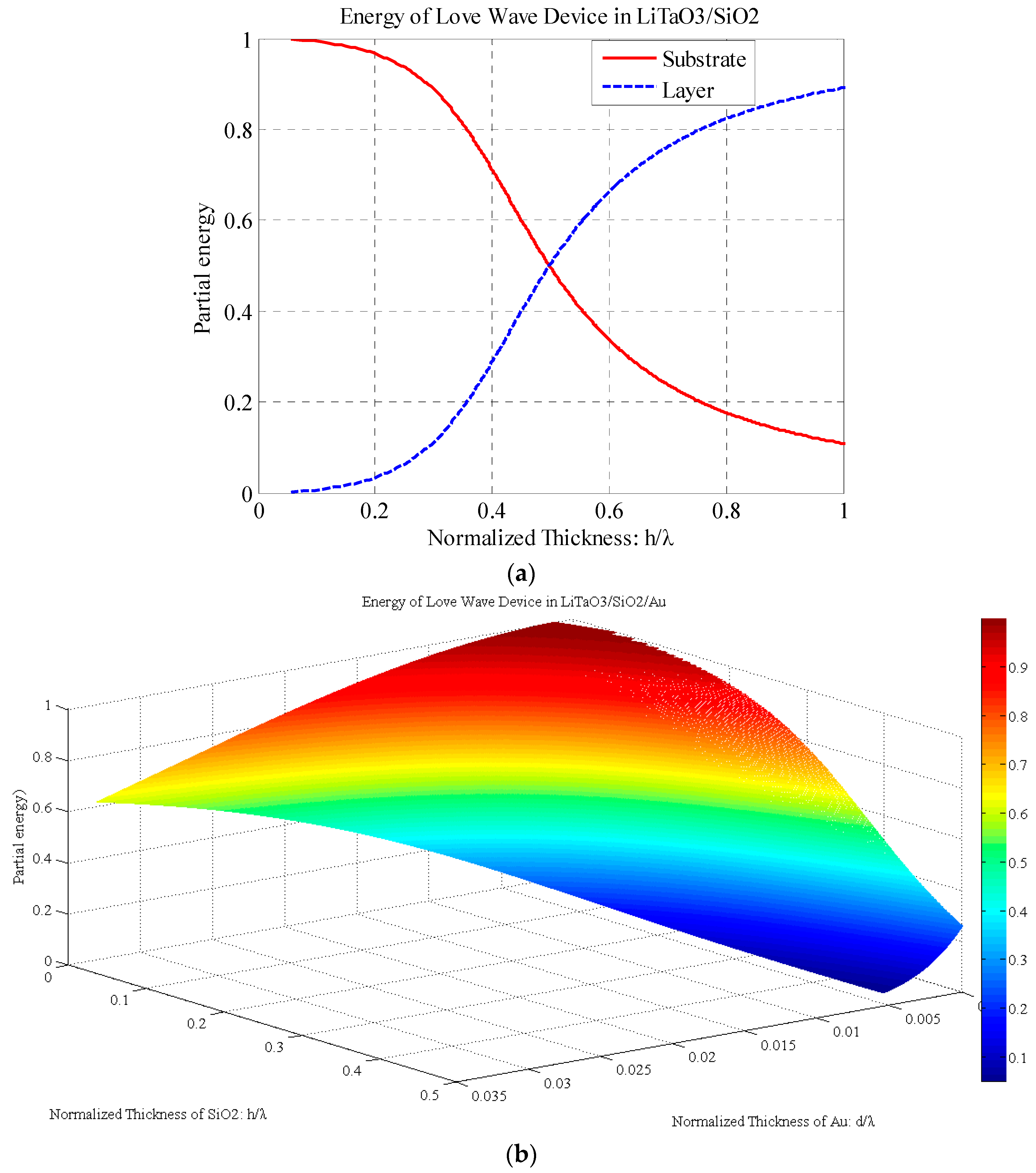
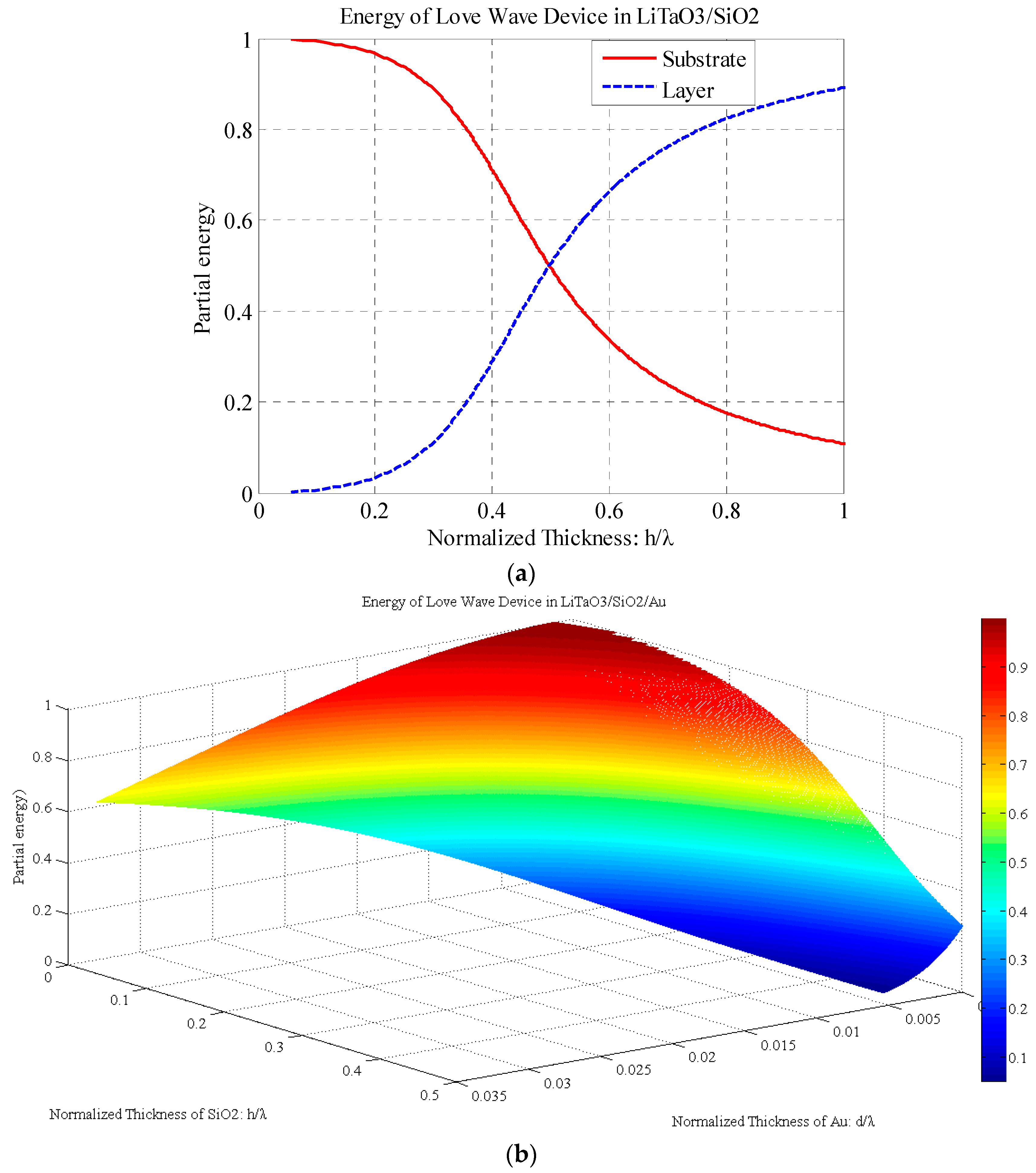
3.2. Results of Love Wave Energy
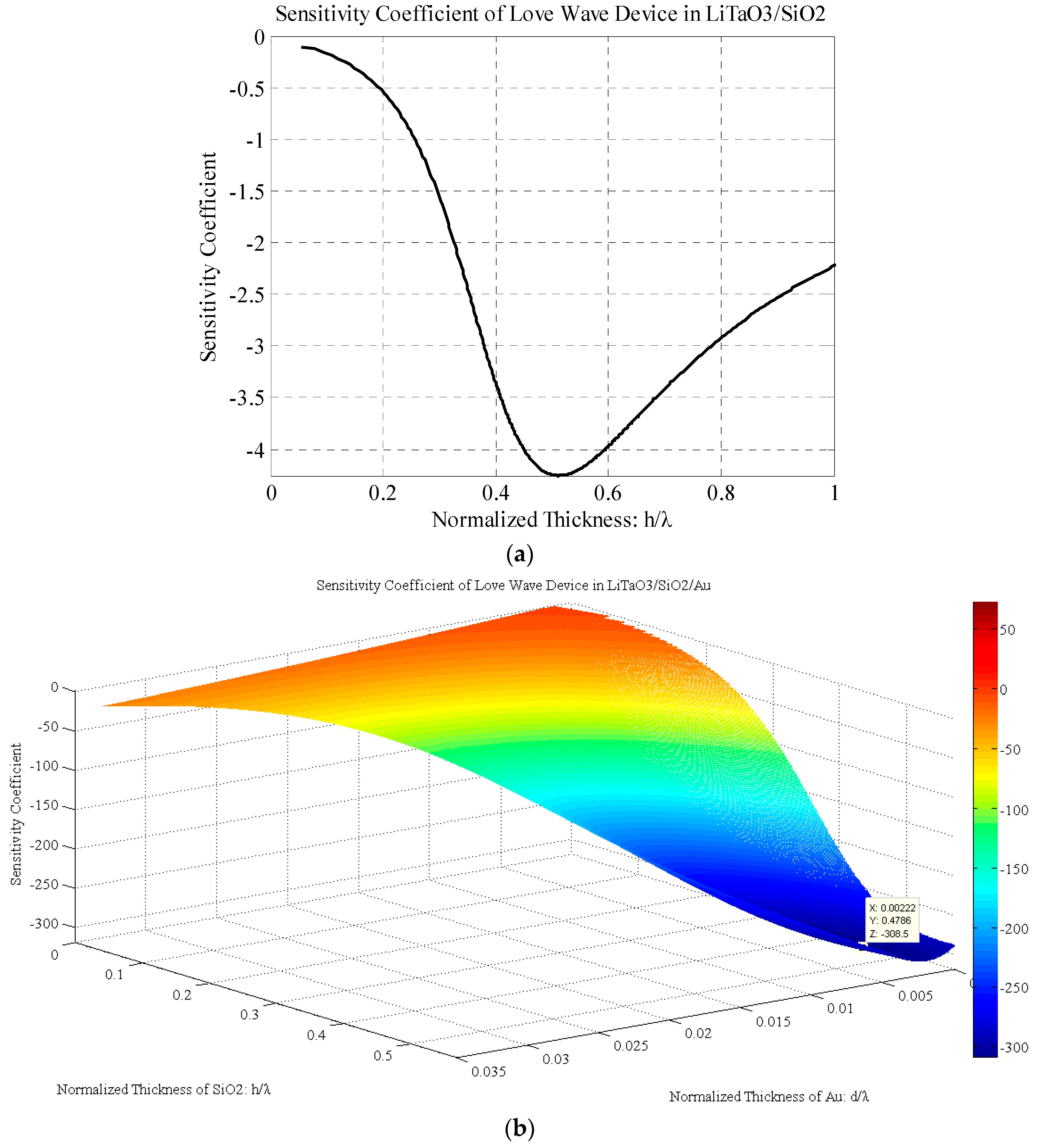
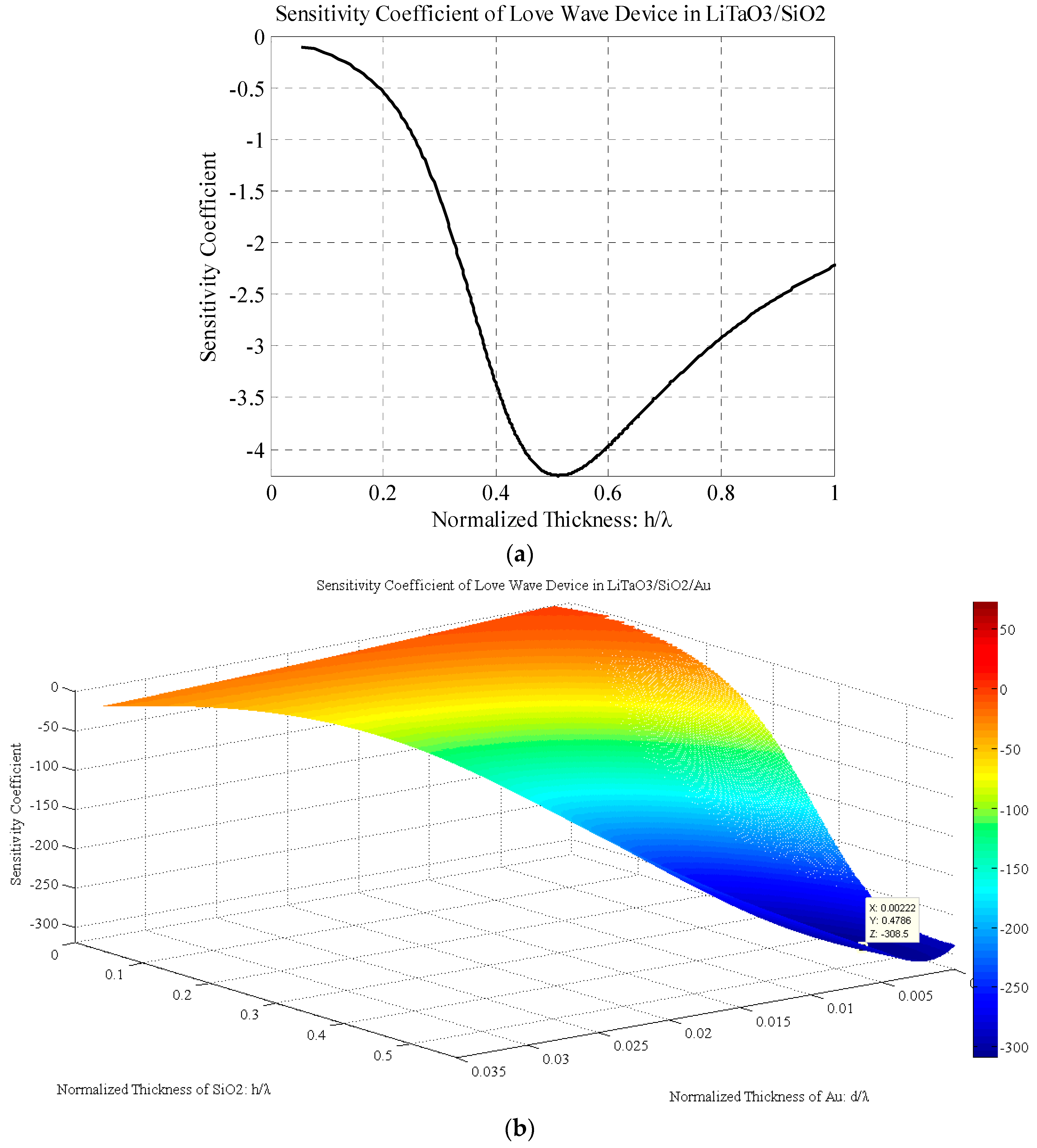
3.3. Results of Love Wave Sensors’ Sensitivity
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Buff, W.; Klett, S.; Rusko, M.; Ehrenpfordt, J.; Goroli, M. Passive remote sensing for temperature and pressure using SAW resonator devices. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1388–1392. [Google Scholar] [CrossRef]
- Scherr, H.; Scholl, G.; Seifert, F.; Weigel, R. Quartz pressure sensor based on SAW reflective delay line. In Proceedings of the Ultrasonics Symposium, San Antonio, TX, USA, 3–6 November 1996; pp. 347–350.
- Afzal, A.; Iqbal, N.; Mujahid, A.; Schirhagl, R. Advanced vapor recognition materials for selective and fast responsive surface acoustic wave sensors: A review. Anal. Chim. Acta 2013, 787, 36–49. [Google Scholar] [CrossRef] [PubMed]
- Länge, K.; Rapp, B.E.; Rapp, M. Surface acoustic wave biosensors: A review. Anal. Bioanal. Chem. 2008, 391, 1509–1519. [Google Scholar] [CrossRef] [PubMed]
- Ballantine, D.S., Jr.; White, R.M.; Martin, S.J.; Ricco, A.J.; Zellers, E.T.; Frye, G.C.; Wohltjen, H. Acoustic Wave Sensors: Theory, Design, & Physico-Chemical Applications; Academic Press: San Diego, CA, USA, 1996. [Google Scholar]
- Länge, K.; Bender, F.; Voigt, A.; Gao, H.; Rapp, M. A surface acoustic wave iosensor concept with low flow cell volumes for label-free detection. Anal. Chem. 2003, 75, 5561–5566. [Google Scholar] [CrossRef] [PubMed]
- Hur, Y.; Han, J.; Seon, J.; Pak, Y.E.; Roh, Y. Development of an SH-SAW sensor for the detection of DNA hybridization. Sens. Actuators A Phys. 2005, 120, 462–467. [Google Scholar] [CrossRef]
- Feng, C.T.; Cheng, C.J.; Atashbar, M.Z. PMMA/64° YX-LiNbO3 guided SH-SAW based immunosensing system. In Proceedings of the Sensors IEEE, Limerick, Ireland, 28–31 October 2011; pp. 308–311.
- Wohltjen, H.; Dessy, R. Surface acoustic wave probe for chemical analysis. I. Introduction and instrument description. Anal. Chem. 1979, 51, 1458–1464. [Google Scholar] [CrossRef]
- Browning, T.; Lewis, M. A new class of quartz crystal oscillator controlled by surface-skimming bulk waves. In Proceedings of the 31st Annual Symposium on Frequency Control, Fort Monnount, NJ, USA, 1–3 June 1977; pp. 258–265.
- Du, J.; Harding, G.L.; Ogilvy, J.A.; Dencher, P.R.; Lake, M. A study of Love-wave acoustic sensors. Sens. Actuators A Phys. 1996, 56, 211–219. [Google Scholar] [CrossRef]
- Kovacs, G.; Lubking, G.; Vellekoop, M.; Venema, A. Love waves for (bio)-chemical sensing in liquids. In Proceedings of the Ultrasonics Symposium, Tucson, AZ, USA, 20–23 October 1992; pp. 281–285.
- Lee, S.; Kim, K.-B.; Kim, Y.-I. Love wave SAW biosensors for detection of antigen-antibody binding and comparison with SPR biosensor. Food Sci. Biotechnol. 2011, 20, 1413–1418. [Google Scholar] [CrossRef]
- Fertier, L.; Cretin, M.; Rolland, M.; Durand, J.-O.; Raehm, L.; Desmet, R.; Melnyk, O.; Zimmermann, C.; Déjous, C.; Rebière, D. Love wave immunosensor for antibody recognition using an innovative semicarbazide surface functionalization. Sens. Actuators B Chem. 2009, 140, 616–622. [Google Scholar] [CrossRef]
- Barié, N.; Wessa, T.; Bruns, M.; Rapp, M. Love waves in SiO2 layers on STW-resonators based on LiTaO3. Talanta 2004, 62, 71–79. [Google Scholar] [CrossRef]
- Branch, D.W.; Brozik, S.M. Low-level detection of a Bacillus anthracis simulant using Love-wave biosensors on 36° YX LiTaO3. Biosens. Bioelectron. 2004, 19, 849–859. [Google Scholar] [CrossRef] [PubMed]
- Gizeli, E.; Bender, F.; Rasmusson, A.; Saha, K.; Josse, F.; Cernosek, R. Sensitivity of the acoustic waveguide biosensor to protein binding as a function of the waveguide properties. Biosens. Bioelectron. 2003, 18, 1399–1406. [Google Scholar] [CrossRef]
- Richardson, M.; Sankaranarayanan, S.K.R.S.; Bhethanabotla, V.R. Low insertion loss and highly sensitive SH-SAW sensors based on 36° YX LiTaO3 through the incorporation of filled microcavities. IEEE Sens. J. 2015, 15, 787–796. [Google Scholar] [CrossRef]
- Moriizumi, T.; Unno, Y.; Shiokawa, S. New sensor in liquid using leaky SAW. In Proceedings of the Ultrasonics Symposium, Denver, CO, USA, 14–16 October 1987; pp. 579–582.
- Powell, D.A.; Kalantar-zadeh, K.; Ippolito, S.; Wlodarski, W. A layered SAW Device Based on ZnO/LiTaO3 for liquid media sensing applications. In Proceedings of the Ultrasonics Symposium, Munich, Germany, 8–11 October 2002; pp. 493–496.
- Zhang, F.; Li, S.; Cao, K.; Wang, P.; Su, Y.; Zhu, X.; Wan, Y. A microfluidic love-wave biosensing device for PSA detection based on an aptamer beacon probe. Sensors 2015, 15, 13839–13850. [Google Scholar] [CrossRef] [PubMed]
- Freudenberg, J.; Von Schickfus, M.; Hunklinger, S. A SAW immunosensor for operation in liquid using a SiO2 protective layer. Sens. Actuators B Chem. 2001, 76, 147–151. [Google Scholar] [CrossRef]
- Xu, F.; Wang, W.; Hou, J.; Liu, M. Temperature effects on the propagation characteristics of Love waves along multi-guide layers of SiO2/SU-8 on ST-90° X quartz. Sensors 2012, 12, 7337–7349. [Google Scholar] [CrossRef] [PubMed]
- Du, J.; Harding, G.L. A multilayer structure for Love-mode acoustic sensors. Sens. Actuators A Phys. 1998, 65, 152–159. [Google Scholar] [CrossRef]
- Dong, S.; Li, J. Self-assembled monolayers of thiols on gold electrodes for bioelectrochemistry and biosensors. Bioelectrochem. Bioenerg. 1997, 42, 7–13. [Google Scholar] [CrossRef]
- Seshadri, S.R. Energy transport velocity of surface elastic waves. J. Appl. Phys. 1983, 54, 1699–1703. [Google Scholar] [CrossRef]
- McHale, G.; Newton, M.I.; Martin, F. Theoretical mass sensitivity of Love wave and layer guided acoustic plate mode sensors. J. Appl. Phys. 2002, 91, 9701–9710. [Google Scholar] [CrossRef]
- Auld, B.A. Acoustic Fields and Waves in Solids, 2nd ed.; Krieger: Malabar, FL, USA, 1990. [Google Scholar]
- Francis, L. Investigation of Love Wave Sensors Optimisation for Biosensing Applications; Université Catholique De Louvain: Louvain-la-Neuve, Belgium, 2001. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Density (kg/m3) | Shear Velocity (m/s) |
|---|---|---|
| SiO2 | 2200 | 3766 |
| Au | 19,300 | 1215 |
| 36° YX LiTaO3 | 7454 | 4200 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Wan, Y.; Fan, C.; Su, Y. Theoretical Study of Monolayer and Double-Layer Waveguide Love Wave Sensors for Achieving High Sensitivity. Sensors 2017, 17, 653. https://doi.org/10.3390/s17030653
Li S, Wan Y, Fan C, Su Y. Theoretical Study of Monolayer and Double-Layer Waveguide Love Wave Sensors for Achieving High Sensitivity. Sensors. 2017; 17(3):653. https://doi.org/10.3390/s17030653
Chicago/Turabian StyleLi, Shuangming, Ying Wan, Chunhai Fan, and Yan Su. 2017. "Theoretical Study of Monolayer and Double-Layer Waveguide Love Wave Sensors for Achieving High Sensitivity" Sensors 17, no. 3: 653. https://doi.org/10.3390/s17030653